3.1. Finite Element Analysis
A three-dimensional FEM model of a steel plate with a corrosion defect is built by using the commercial FEM software ABAQUS. The dimensions of the steel plate are 600 mm × 600 mm × 3 mm, and the steel plate has three elements through the plate thickness. An element size of 1 × 1 × 1 mm
3 is used; and the time step is 0.0003 s, which meets the required stability conditions in the space iteration and time convergence criteria in the finite element solution process. To eliminate boundary effects, two 80 mm-wide absorbing boundaries are placed along the edges of the model. To study the changes in the reflection and transmission signals of the propagation field caused by the depth of the defect, the corrosion defect is located at the center of the steel plate. The area of the corrosion is 20 mm × 20 mm, and the corrosion depth is set as 0.6 mm, 1.5 mm, 2.2 mm, and 3.0 mm. The material properties of the steel plate used in the simulations are listed in
Table 1.
The excitation sinusoidal pulse modulated by the Hanning window has 10 cycles. Considering the frequency band of the sensor and the plate thickness, the center frequency of the excitation signal ranges from 170 to 240 kHz. At the same time, we consider the attenuation characteristics of the guided wave, the reflection distance , and the transmission distance changed. As a result, the propagation attenuation factor β of the guided wave becomes , 1, and , 1.
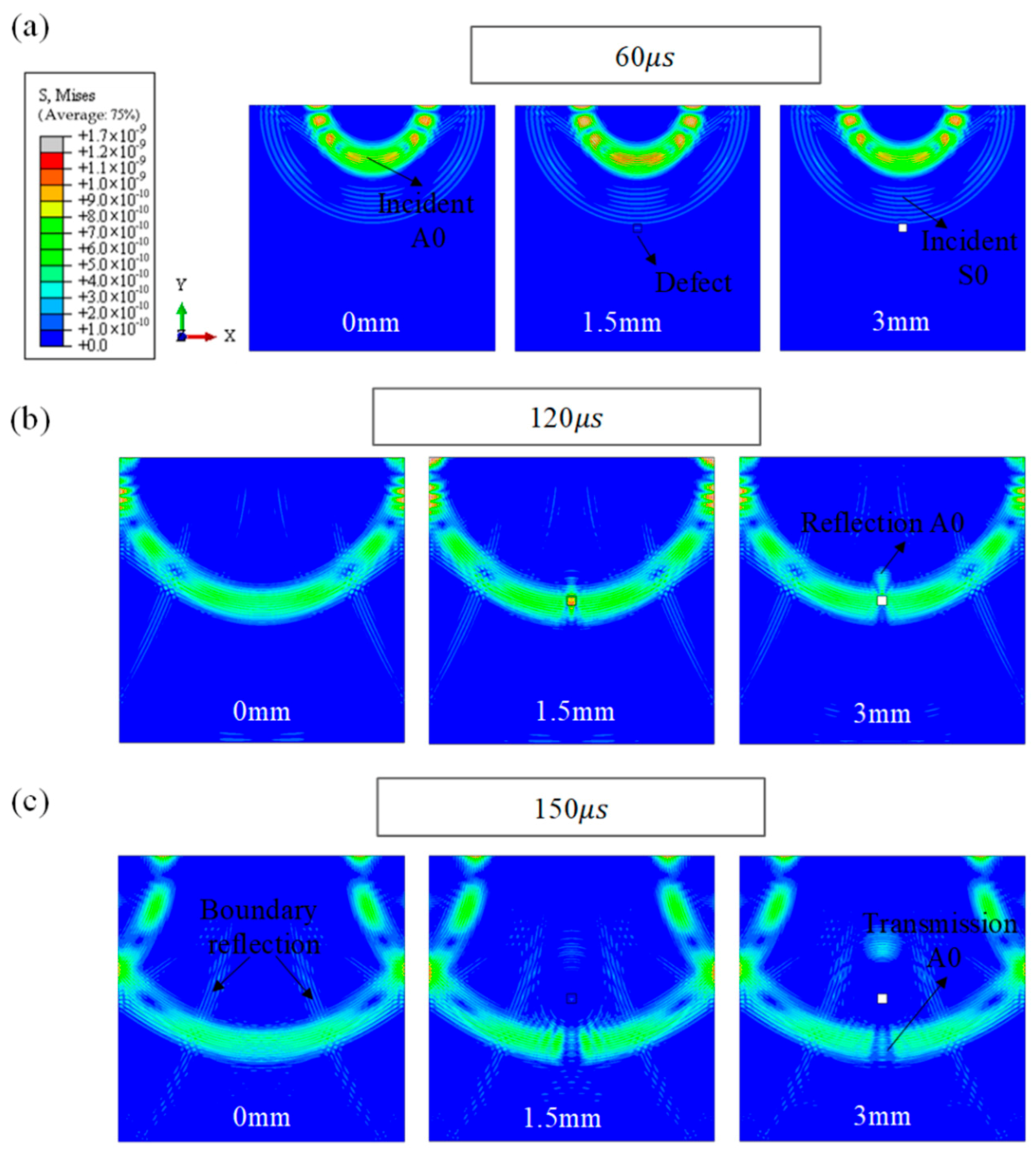
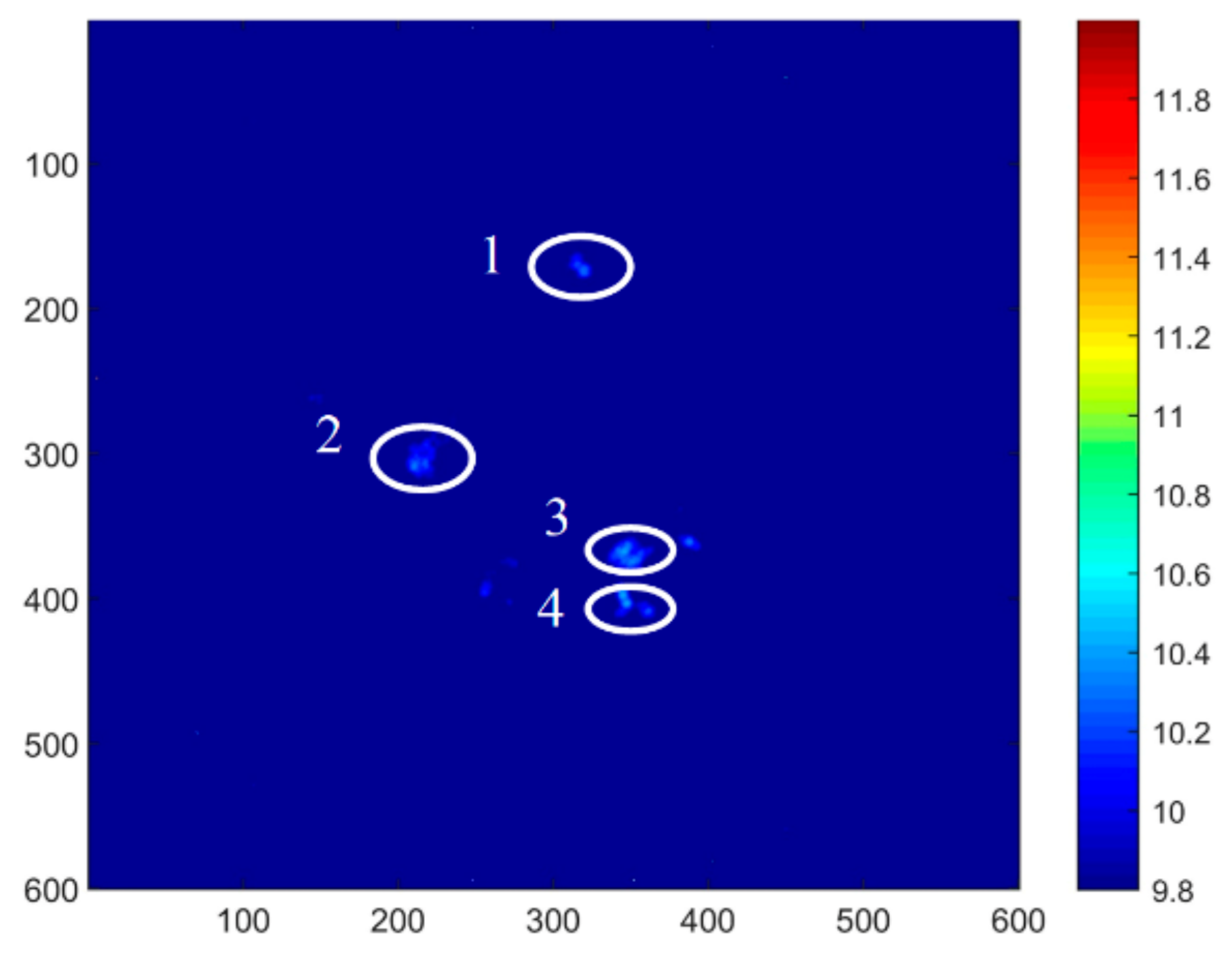
Figure 4 shows the numerical simulation results for the time evolution of the displacement contour in the z-direction during the simulated guided wave signal propagation in the corrosion plate when
f = 200 kHz and
h = 0 mm, 1.5 mm, and 3 mm. The displacement contours in
Figure 4 visually show the effect of the corrosion depth on the guided wave signals. The simulated guided wave signal spreads around initially. After interacting with the corrosion, the mode conversion occurs, which generates the scattered waves, as shown in
Figure 4b,c. These scattered waves continue to propagate and are received by the receivers along with the reflected waves from the edges. When the corrosion depth in the plate changes, so do the reflected wave magnitude and the transmitted wave magnitude generated by the interaction of the waves with the defect. Despite the complexity of wave propagation, it should be strongly emphasized that the color of A0 is darker than that of S0, which indicates that the A0 mode has a larger proportion in the propagation.
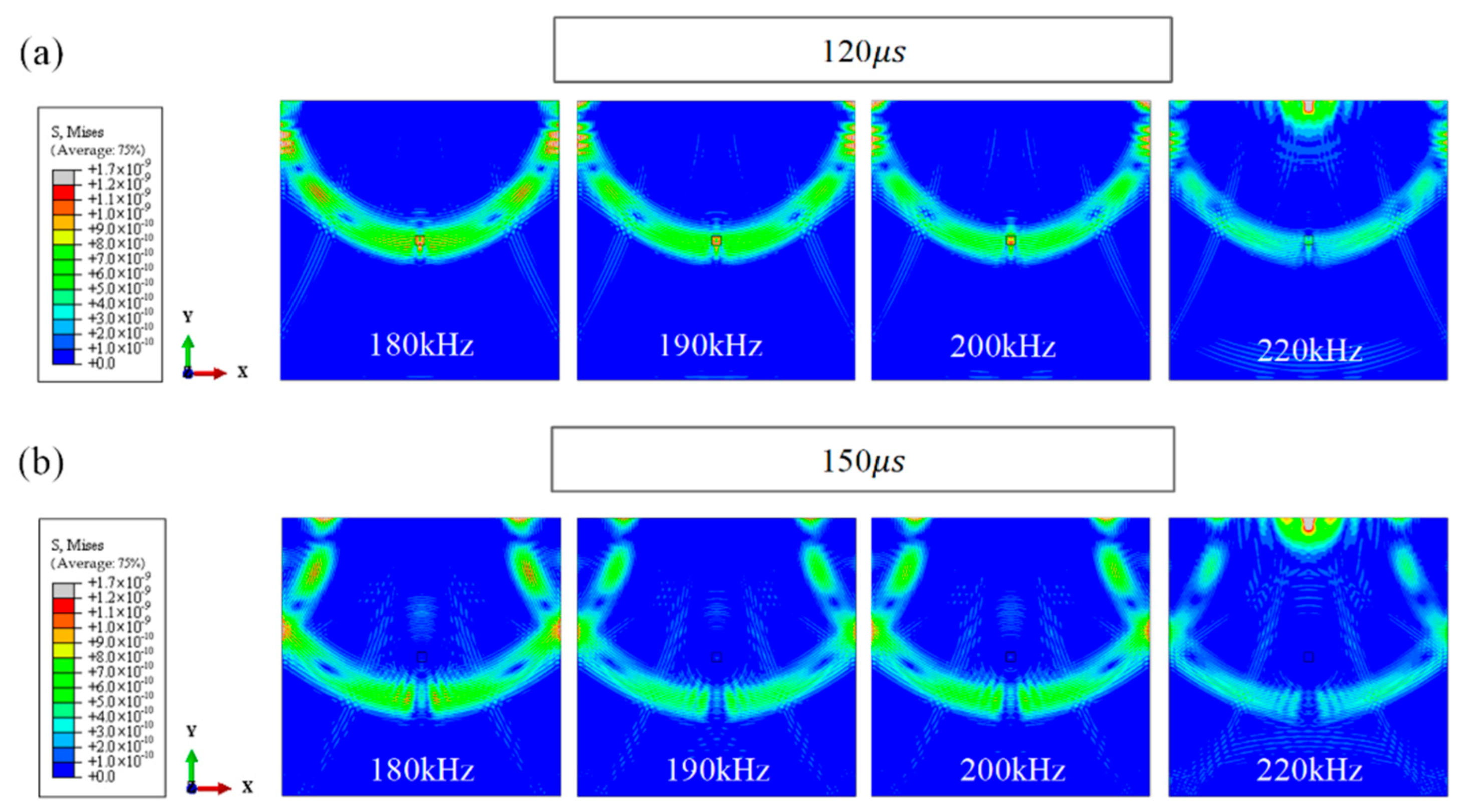
With the defect depth set at 1.5 mm, the wave propagating under normal excitation with different guided wave signal frequencies are used for numerical analysis, as shown in
Figure 5. At the excitation frequency of
f = 180 kHz–220 kHz, two guided wave modes are present, the S0 and A0 modes. The A0 mode is significantly slower than the S0 mode and the A0 mode is much more dispersive than the S0 mode. The wave scatters from the corrosion defect become apparent at
t = 120
s, with clear mode conversion at
t = 150
s. When the other conditions are maintained, the change in the excitation frequency makes the magnitude of the transmitted wave A0 unequal. The waves that have already been reflected or transmitted from the edges of the corrosion are captured by the receiving points.
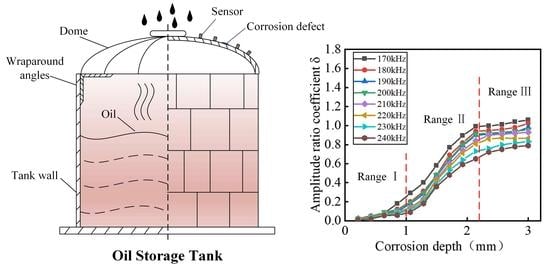
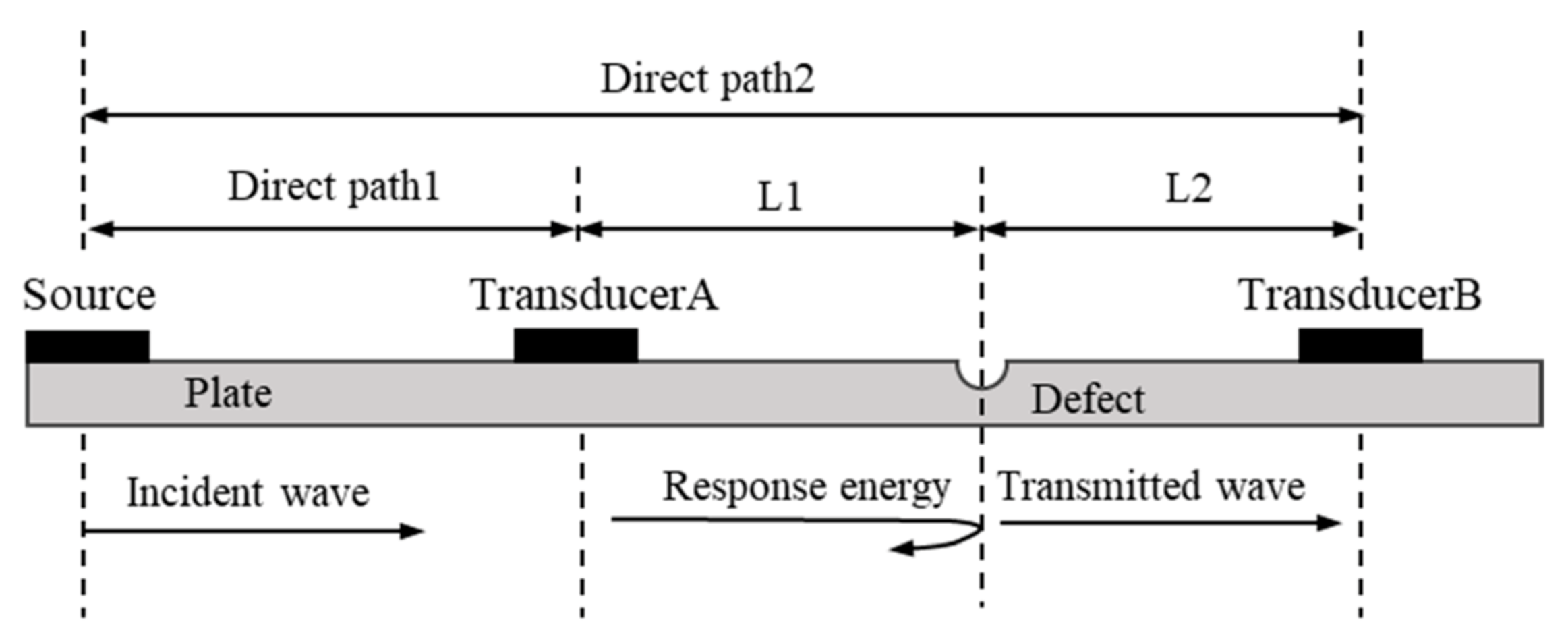
The relative positions of the corrosion defect and the reflected and transmitted difference of the attenuation factor β will cause the change of the amplitude ratio factor δ. Meanwhile, both the frequency of the excitation signal and the depth of the defect being detected have an impact on the guided wave detection capability. Therefore, to study the guided wave propagation attenuation and the reflected and transmitted wave amplitude ratio, the relationship between the amplitude ratio of the reflected and transmitted wave and the depth of the corrosion defect under different attenuation factors β and excitation frequencies
f are investigated, as shown in
Figure 6. It can be seen from
Figure 6 that under different excitation frequencies
f, the amplitude ratio coefficient δ of the defects is positively correlated with the defect depth. The smaller the excitation frequency
f is, the larger the amplitude ratio coefficient δ under the same defect depth is. Moreover, when the corrosion depth
h is the same as the attenuation factor β, the larger the values of
and
are, the smaller the defect amplitude ratio coefficient δ is. By determining the ratio of attenuation of the guided wave propagation and the frequency of the excitation signal, the corresponding corrosion defect depth can be obtained according to the defect depth to amplitude ratio curve, so the degree of corrosion of the defect can be obtained.
3.2. Corrosion Depth Detection Experiment Piezoelectric Wafer Active Sensor
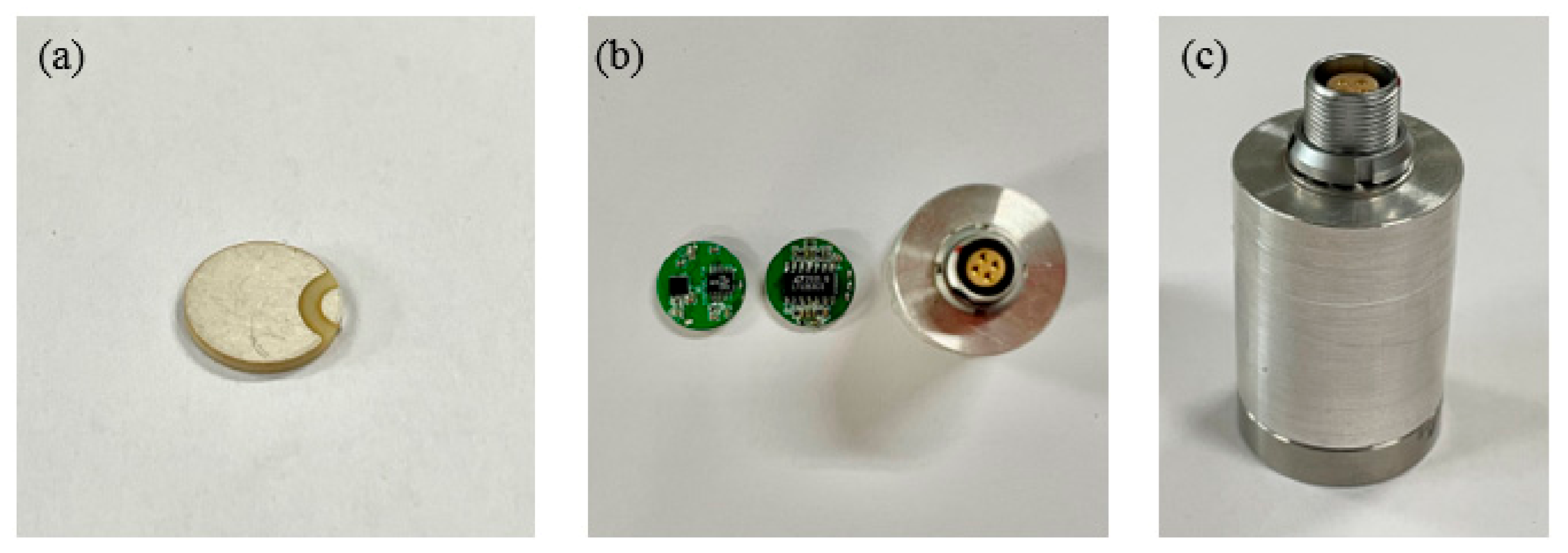
The RTAR coefficient method applies to the roof of a storage tank. The stored substances in oil storage tanks can produce flammable and explosive, corrosive gases or liquids, so precision instruments entering the oil area must be of explosion-proof design. At the same time, residual vibrations of the piezoelectric sheet will seriously affect the accuracy of corrosion defect depth detection. Therefore, home-made piezoelectric active sensors with explosion-proof design were developed. Typically, a sensor mainly includes a
Φ10 × 1 mm piezoelectric ceramic sheet, a matching layer, a backing layer, filter amplifier circuits, and a stainless-steel shell. Among them, the piezoelectric ceramic sheet was the core functional material responsible for converting acoustic signals to electrical signals. The main function of the matching layer is to improve the energy conversion efficiency of the piezoelectric ceramic sheet, and its thickness is 1/4 of the wavelength of the sound wave signal of the frequency selected in the experiment. The role of the backing layer is to effectively avoid the interference caused by residual vibration. The filter amplifier circuits filter the received signal as well as performs power amplification to achieve a final voltage amplification effect of 10 times. Therefore, in the experiment, the Al
2O
3 ceramic chip is selected as the matching layer material of the home-made sensor, and tungsten powder and epoxy resin were mixed at a ratio of 10:1 as the backing material, with the material parameters shown in
Table 2. The physical picture of the sensor probe is shown in
Figure 7.
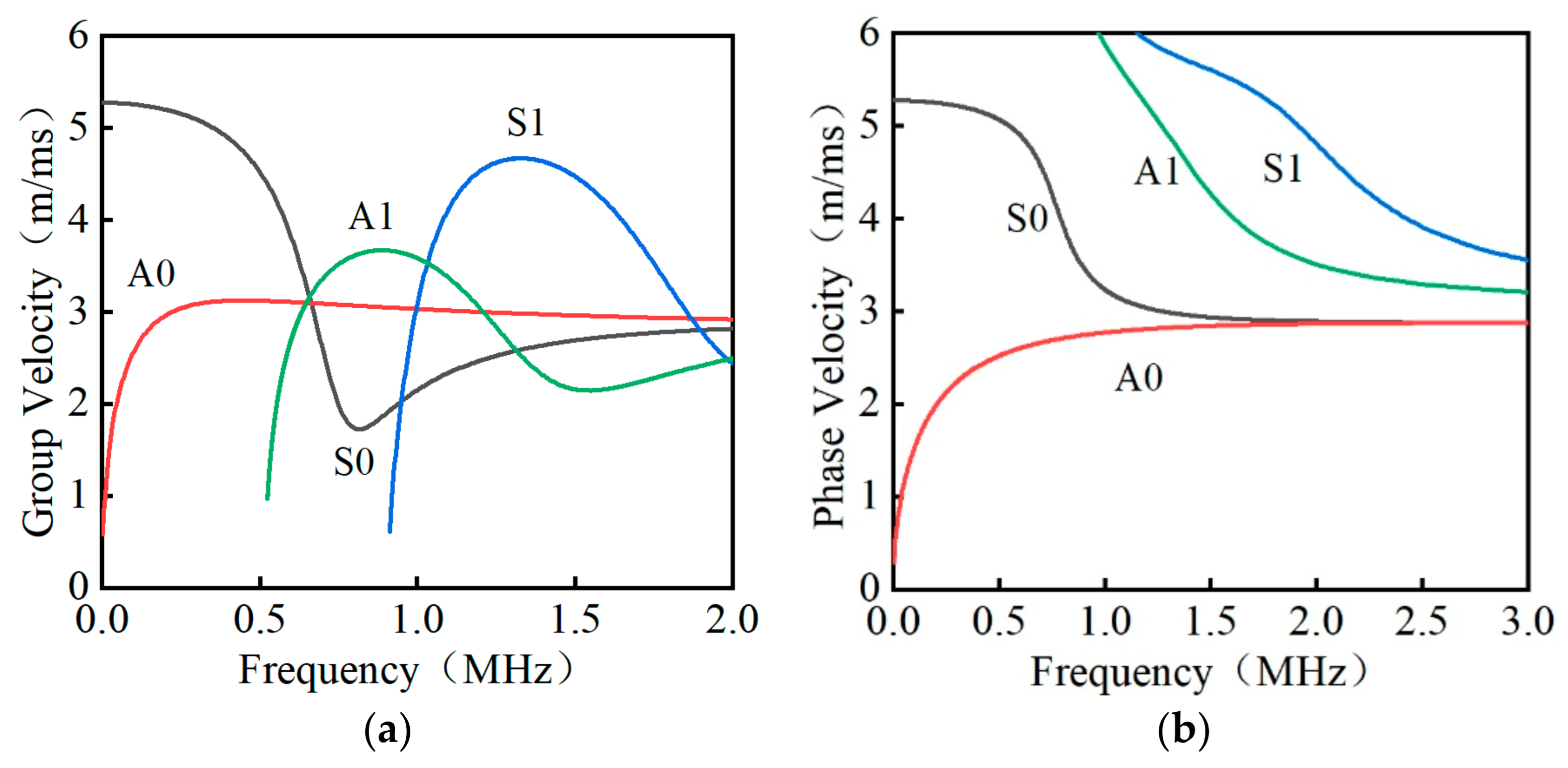
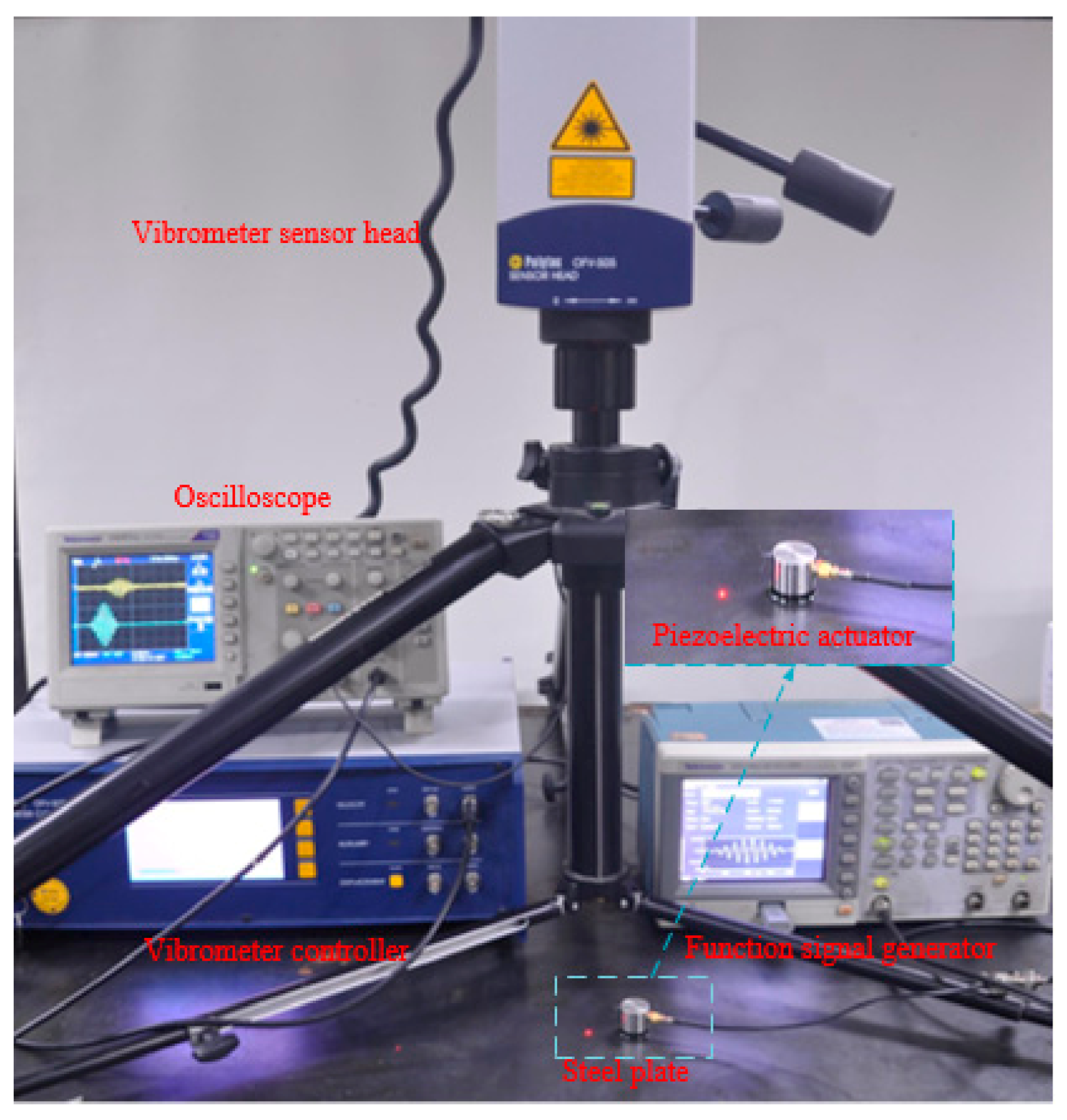
The home-made sensors were calibrated to ensure consistent sensor performance. Polytec’s OFV single-point laser vibrometer was used to measure the vibrational velocity of the steel plate quickly and precisely under the excitation of the piezoelectric vibration source (FUJICERA, AE144S). In the laser vibrometer, a single point vibrometer sensor head (Polytec, OFV-505) was used to receive the laser reflection signal from the measured position; while the vibrometer controller (Polytec, OFV-5000) connected with the sensor head was responsible for decoding the laser reflection signal into the vibrational velocity based on laser doppler vibration measurement technology. The vibrational velocity was displayed and recorded by an oscilloscope (Tektronix, TBS1102). The experimental arrangement is shown in
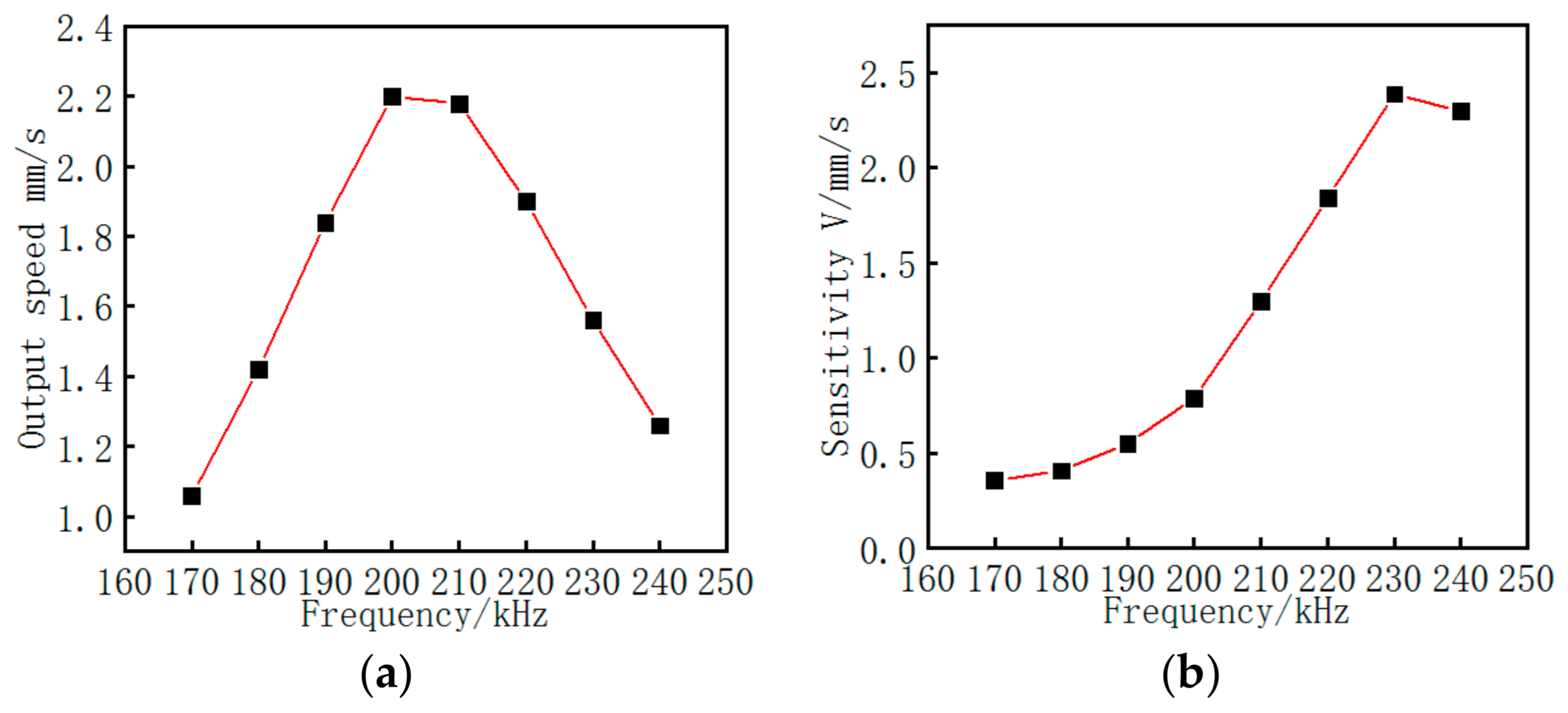
Figure 8, with the excitation and reception positions spaced 20 mm apart, the excitation signal frequency at 170 kHz–240 kHz, and the excitation voltage at 10 V. The home-made sensor sensitivity curve is shown in
Figure 9.
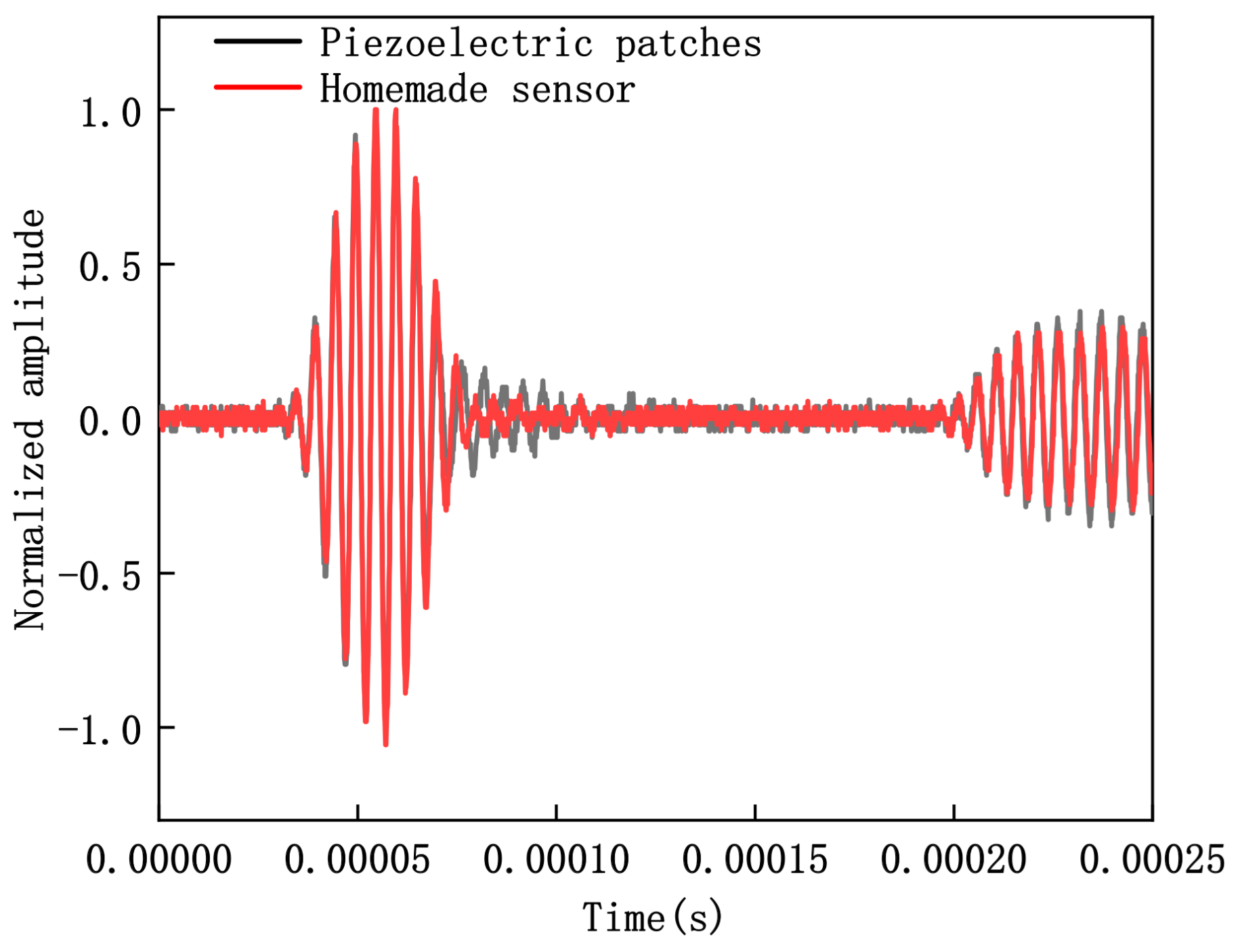
Under the excitation of the same commercial sensor (AE503S acoustic emission sensor produced by Fujifilm), the piezoelectric ceramic sheet and the packaged sensor were used to receive the guided wave signal and normalize the received signal.
Figure 10 shows the comparison of the excitation signal of the piezoelectric wafer before and after assembly. The residual vibration of the piezoelectric sheet significantly improved after assembly, which was conducive to the subsequent experiments.
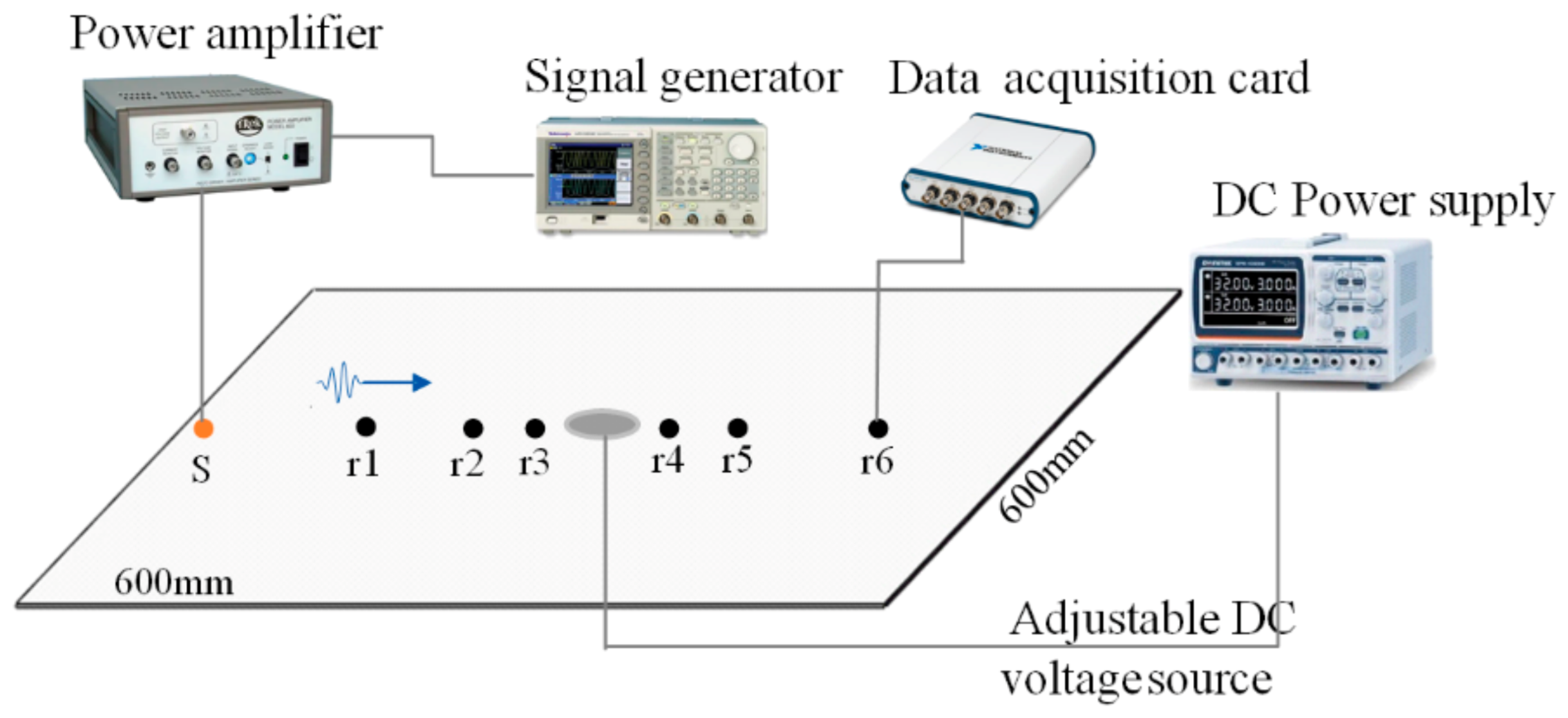
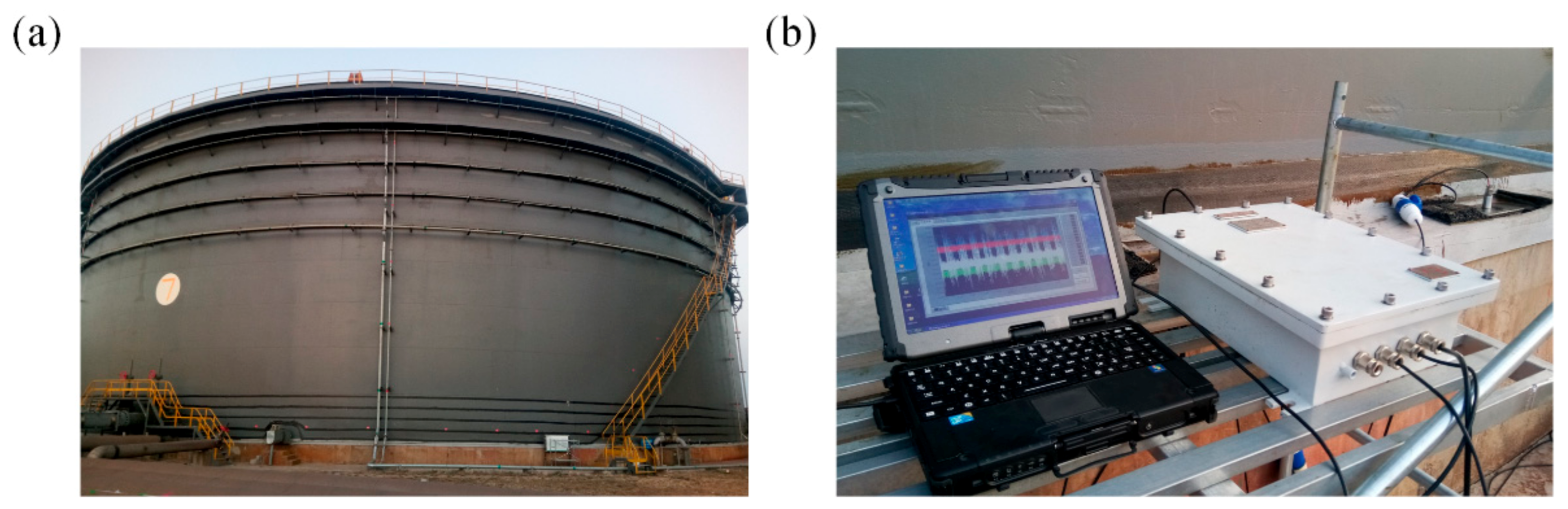
Figure 11 shows the experimental setup of the corrosion depth measurements, an ultrasonic guided wave signal generator, a power amplifier, a data acquisition card, and an adjustable direct current (DC) voltage source. Under electrical excitation, the excitation sensor generated guided waves in the steel plate. The guided waves propagated with an out-spreading pattern, were attenuated due to the damping of the material, underwent reflection and transmission through defects, and finally, were captured by the receiving sensors. The sample was made of a 600
600
3 mm Q235 steel plate. The excitation and receiving sensors were arranged as shown in
Figure 10; the excitation transducer was located on the midpoint of one side of the steel plate, and the receiving transducers could be placed around the feature to receive waves through the plate by using a linear configuration of receiving transducers array. The amplitude ratio coefficients under different guided wave propagation attenuation factors β were obtained by arranging r1–r6 receiving transducers, which agreed with the simulation results. The excitation signal adapted a 10-period sine signal modulated by a Hanning window, and the frequency range was 170–240 kHz.
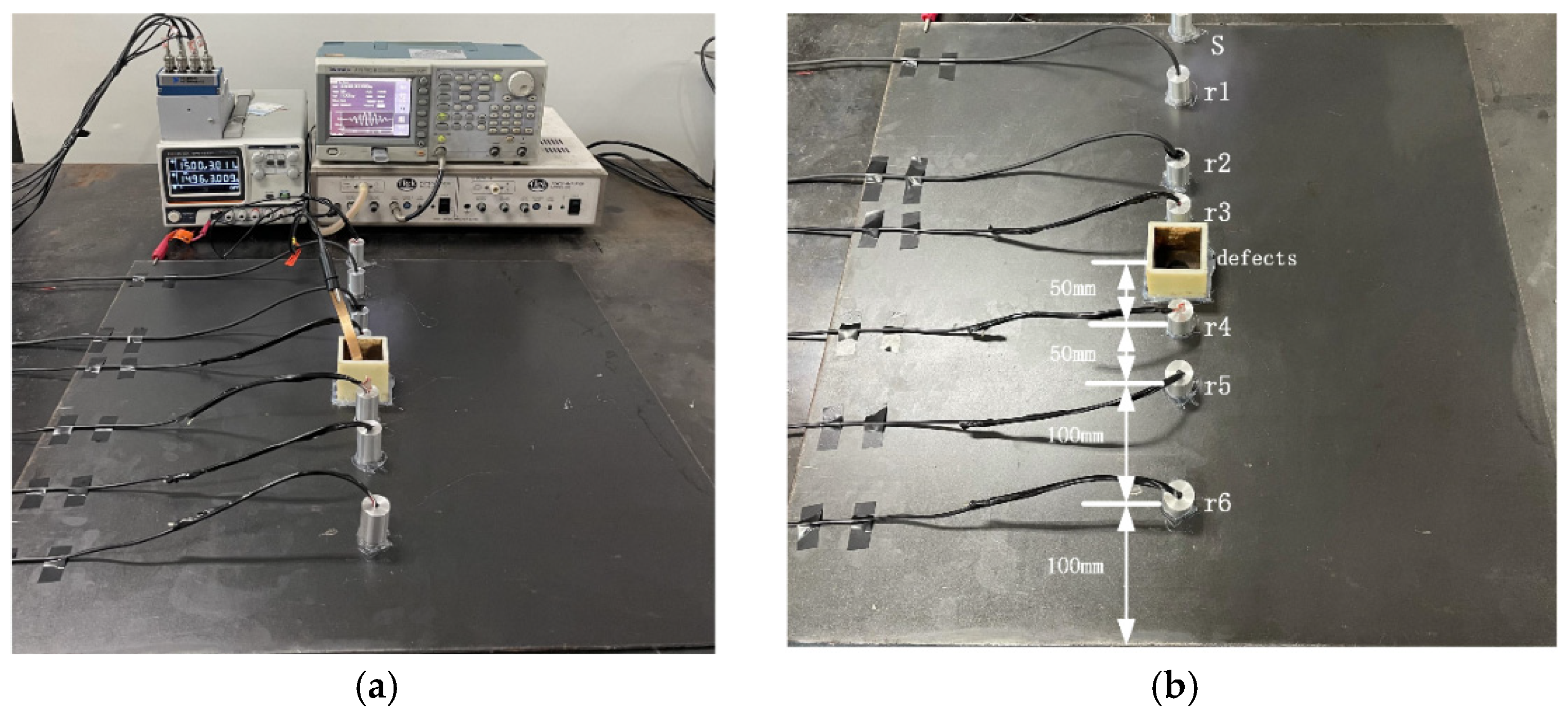
A corrosion formation test was carried out using the impressed current technique. Specifically, the steel plate served as the cathode, the copper sheet acted as an anode, and a 3.5% solution of sodium chloride (NaCl) was poured as an electrolyte into a corrosive vessel to form an electrolytic cell. A power supply equipped with a built-in ammeter and potentiometer was used to impress a DC to the steel plate to induce its significant corrosion in a short period. A constant voltage of 15 V was maintained across the solution and the specimen until the steel plate was corroded and perforated. To measure the data at different corrosion depths with uniform variation, waveform signals were acquired for every 10 min of corrosion using a data acquisition card.
Figure 12 shows the experimental platform for performing depth detection of corrosion defects.
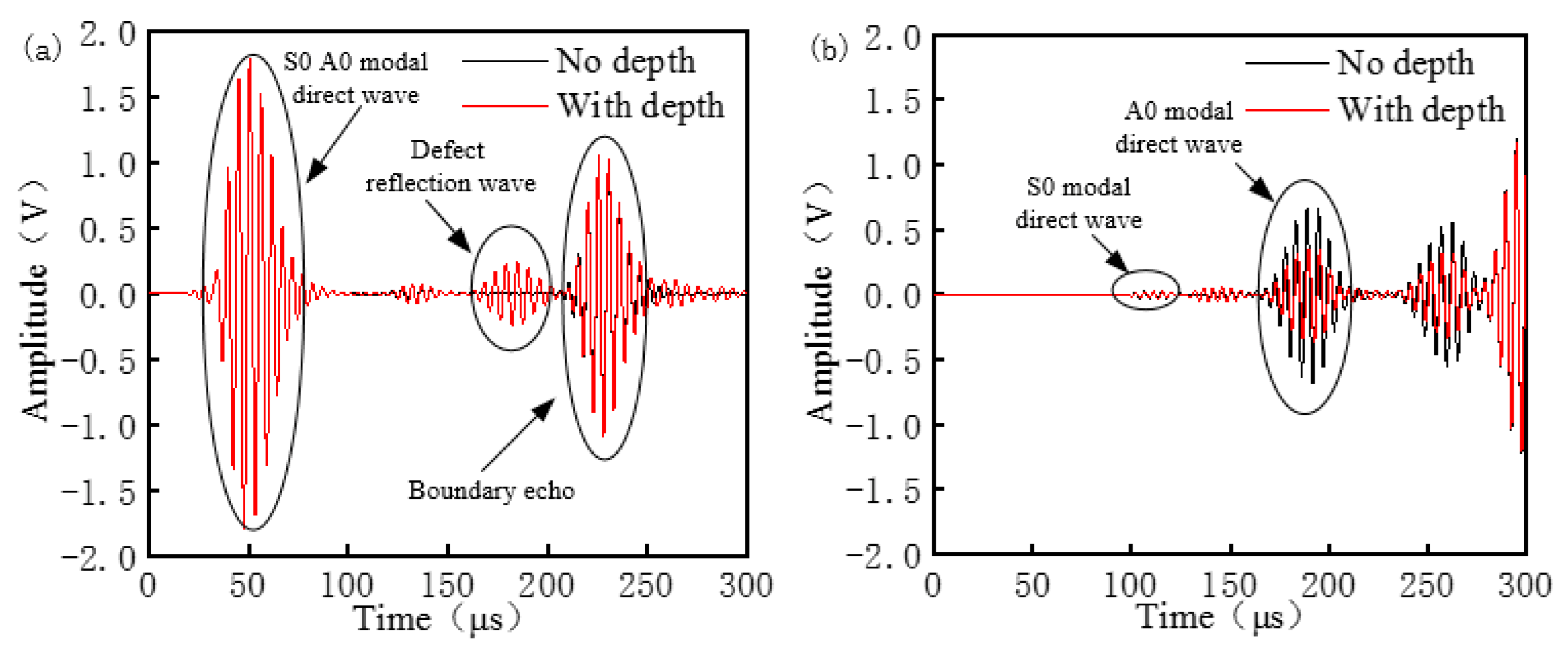
Figure 13a,b show the reflected and transmitted wave signals received by sensor r1 and sensor r6, respectively. The excitation signal voltage was 30 V and the excitation frequency was 200 kHz. From
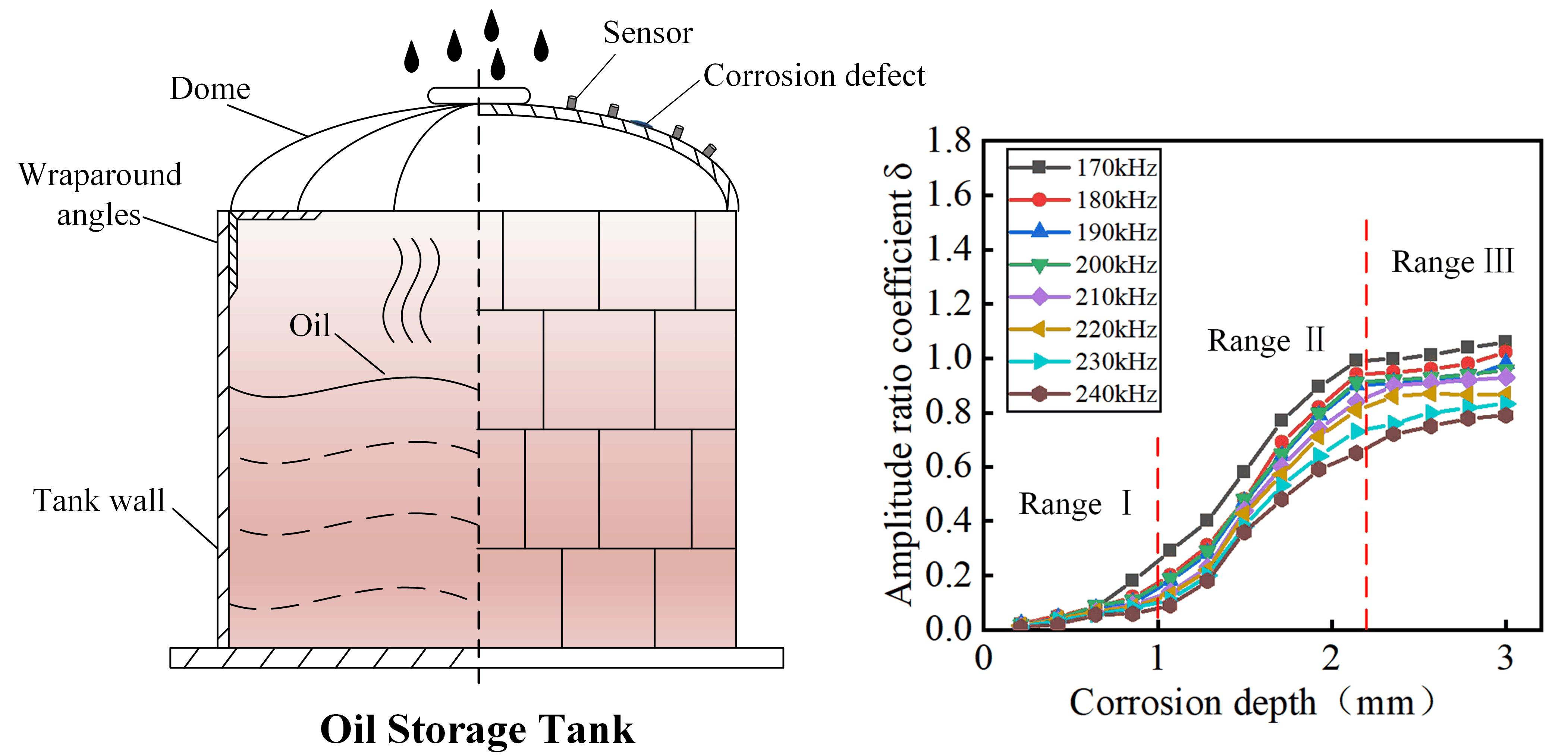
Figure 13a, it can be seen that the received signal in the waveform mainly existed as a direct wave, a defective reflected wave, and a boundary echo. We found that the S0 and A0 modes were mixed, which, after analysis, was thought to be caused by the small spacing between S and r1. From the dispersion curve in
Figure 1, we know that the wave speed of the S0 mode at 200 kHz was 5200 m/s, the wave speed of the A0 mode was 2700 m/s, and the duration of the excitation wave was 50 µs. It is known that the spacing between S and r1 is 100 mm, so the time for the S0 mode to reach r1 is 20 µs, and the time for the A0 mode to reach r1 is 38 µs. The time deviation between them is less than 50 µs. Therefore, the S0 waves and A0 waves overlap at r1. Similarly, in
Figure 13b, it can be seen that there are mainly separated S0 mode waves, A0 mode waves, and boundary echoes in the received signal in the waveform. The time difference between the two is greater than 50 µs, so the S0 and A0 modes are distinguishable at the r6 position.
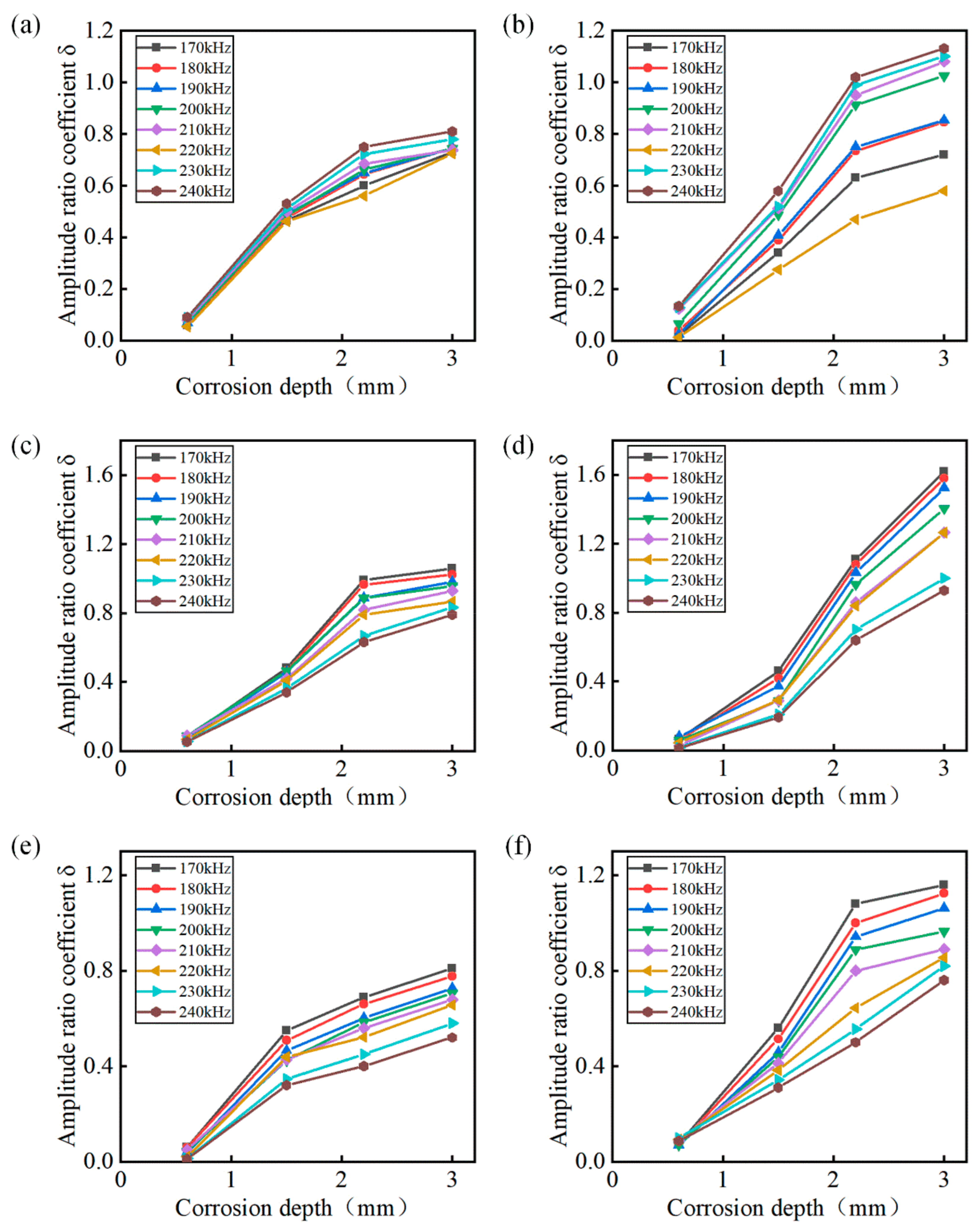
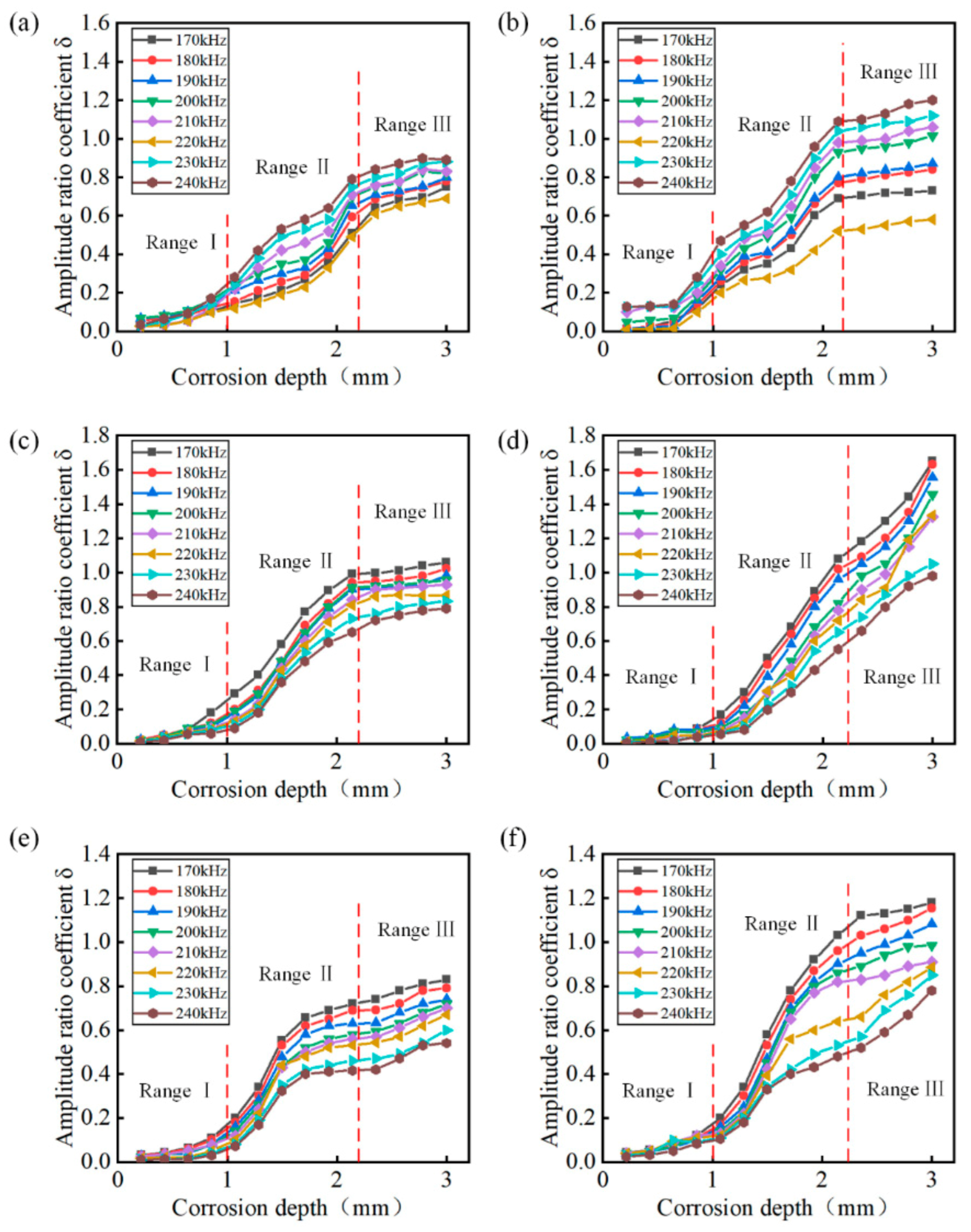
Figure 14 shows that the interaction with defects varied for the same attenuation factor β and the different distances when the excitation frequency was between 170 kHz and 240 kHz, as seen in the change curve between the coefficient δ and the corrosion defect depth. The amplitude ratio coefficient δ increased monotonically with the increased corrosion depth at almost all the excitation frequencies considered in this study. The corrosion process depicted in
Figure 14a shows that when the 220 kHz signal was used, the amplitude ratio coefficient at the attenuation factor β = 1 and the
/
= 200/200 was at its lowest, which means that the 220 kHz signal is not ideal for the detection and evaluation of the defect depth.
Figure 14b shows that when the 220 kHz signal was used, the amplitude ratio coefficient at the attenuation factor β = 1 and
/
= 100/100 was at its lowest. When the defect depth was the same, the amplitude ratio coefficient increases with an increase in the excitation frequency, except at the special frequency in
Figure 14a,b.
Figure 14c–f shows that when the depth of the corrosion defects was the same, the amplitude ratio coefficient decreased with an increase in the excitation frequency. The variation of the amplitude ratio coefficient with the frequency is a complex process since the waves’ interaction with the damage differs at different frequencies.
The amplitude ratio coefficient curves show that a square defect with a side length of 20 mm and a corrosion defect with a depth of 0.21 mm was detectable. Thus, a monotonic increment of the amplitude ratio coefficient with damage growth suggests that the damage can be monitored for a range of growth rates. The results of this study demonstrate how the amplitude ratio coefficient of a guided wave signal can be used in conjunction with the linear array concept at different frequencies to monitor corrosion and hole damages.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}