Magnetorheological Effect of Magnetoactive Elastomer with a Permalloy Filler

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods of Production of Permalloy Fillers and Fabrication of MAE Specimens
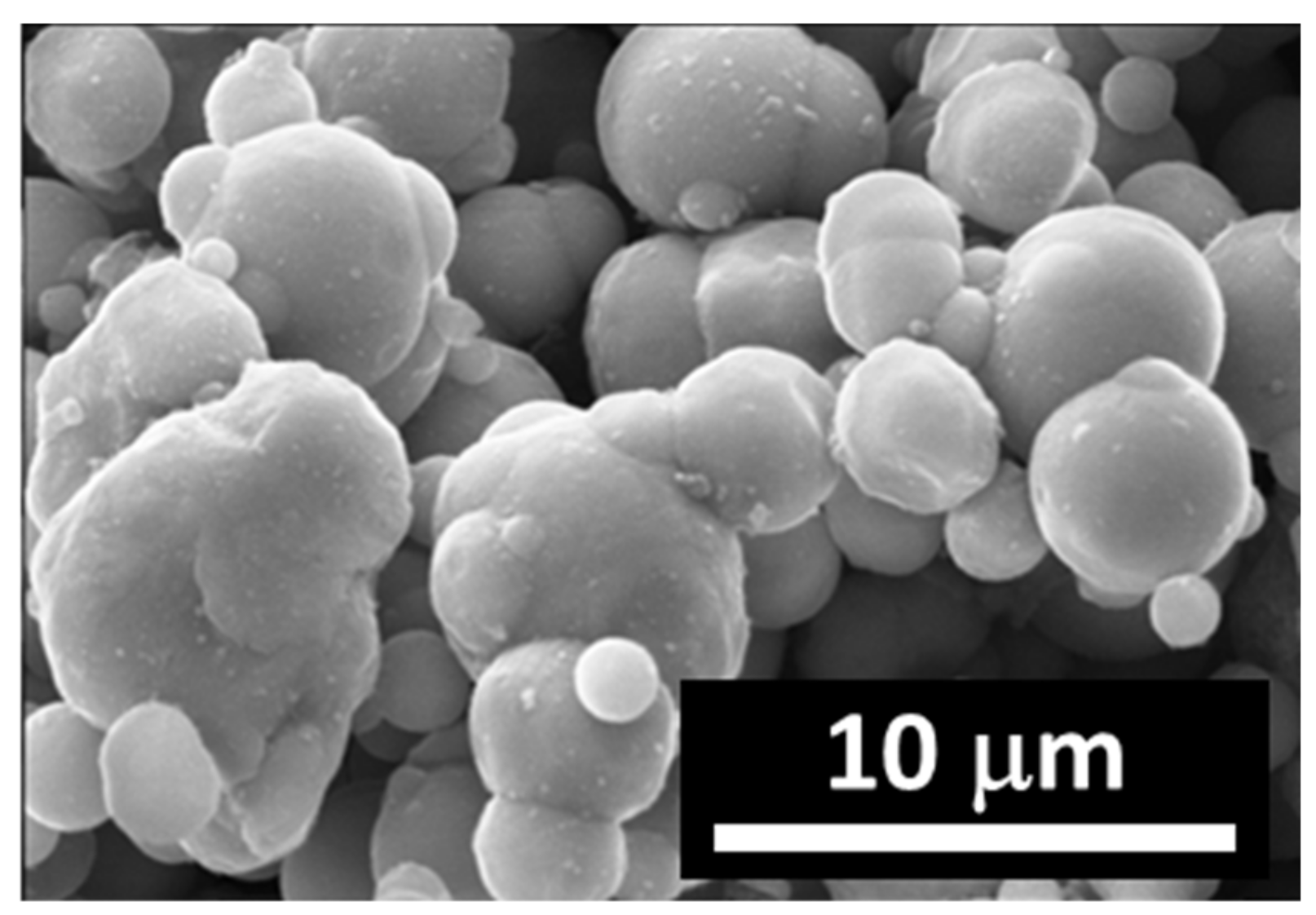
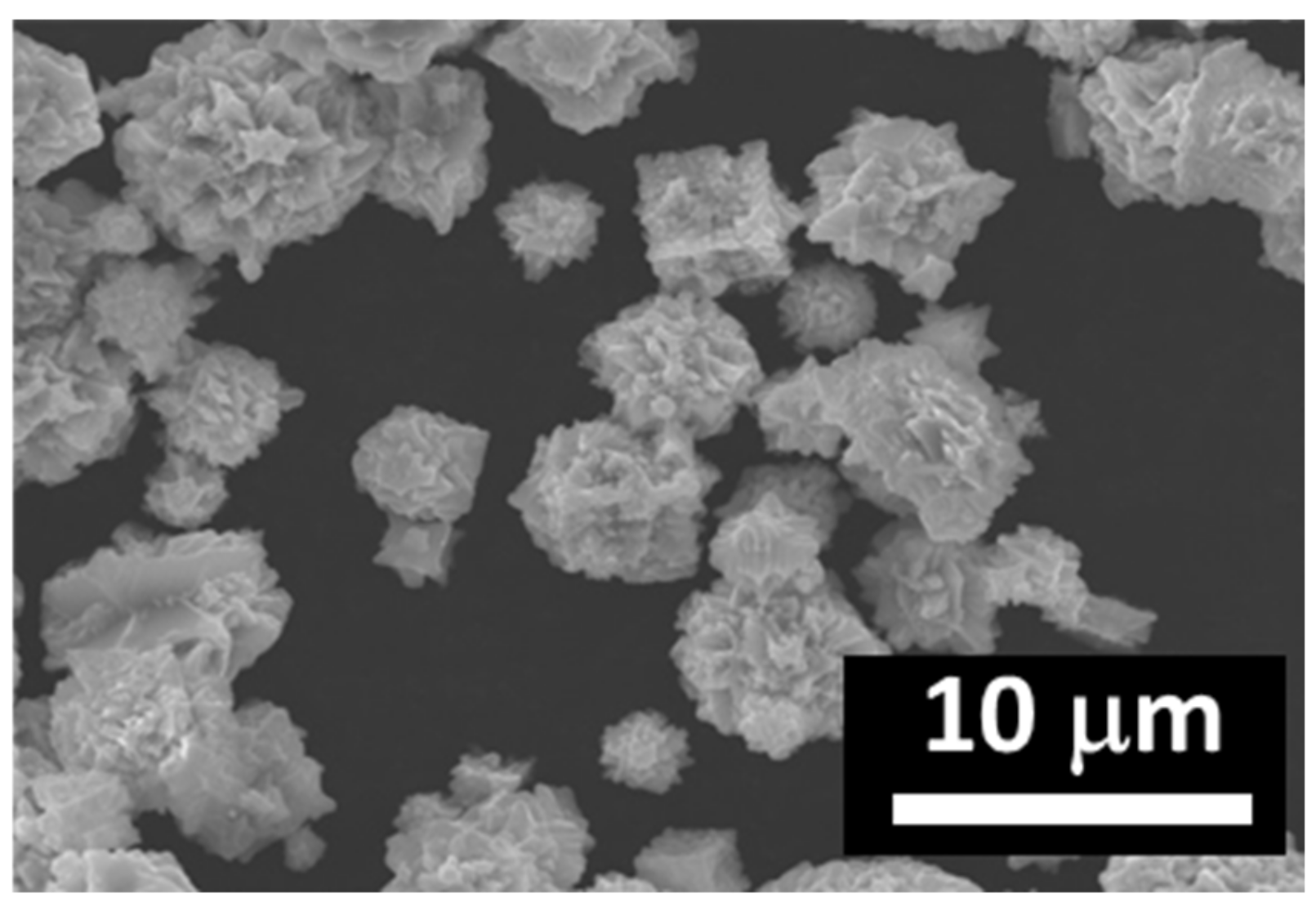
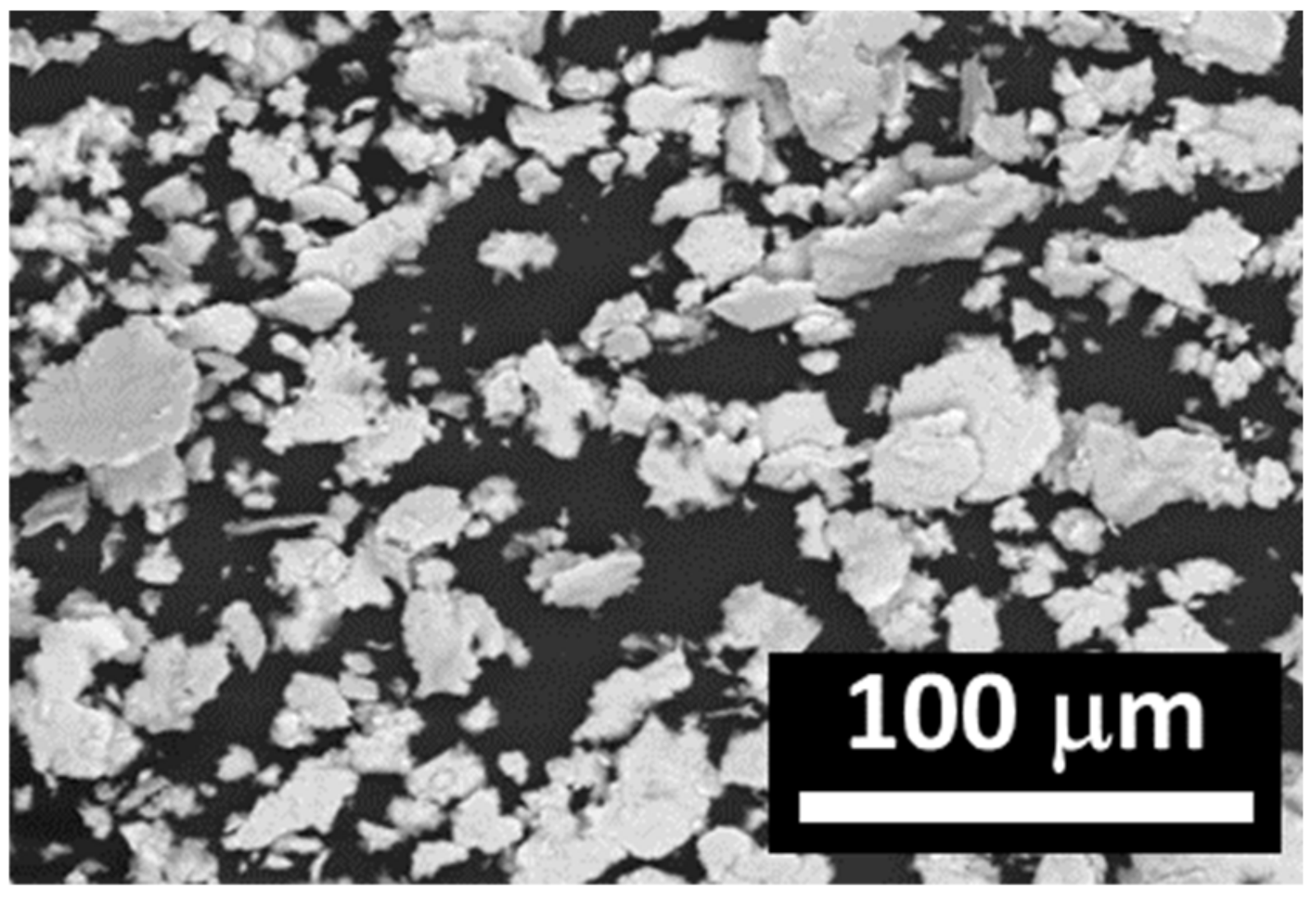
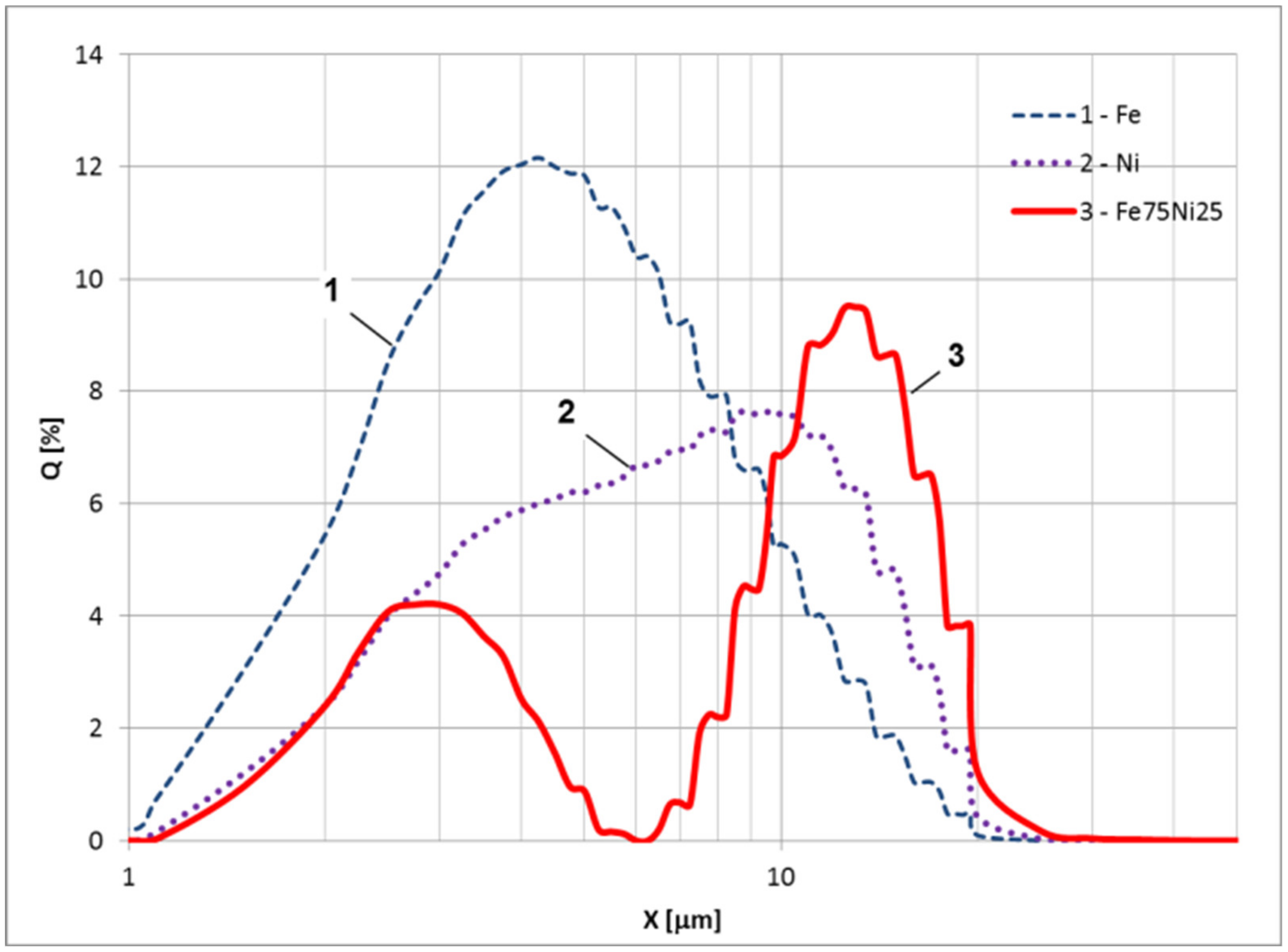
2.1. Methods Production of Permalloy Filler
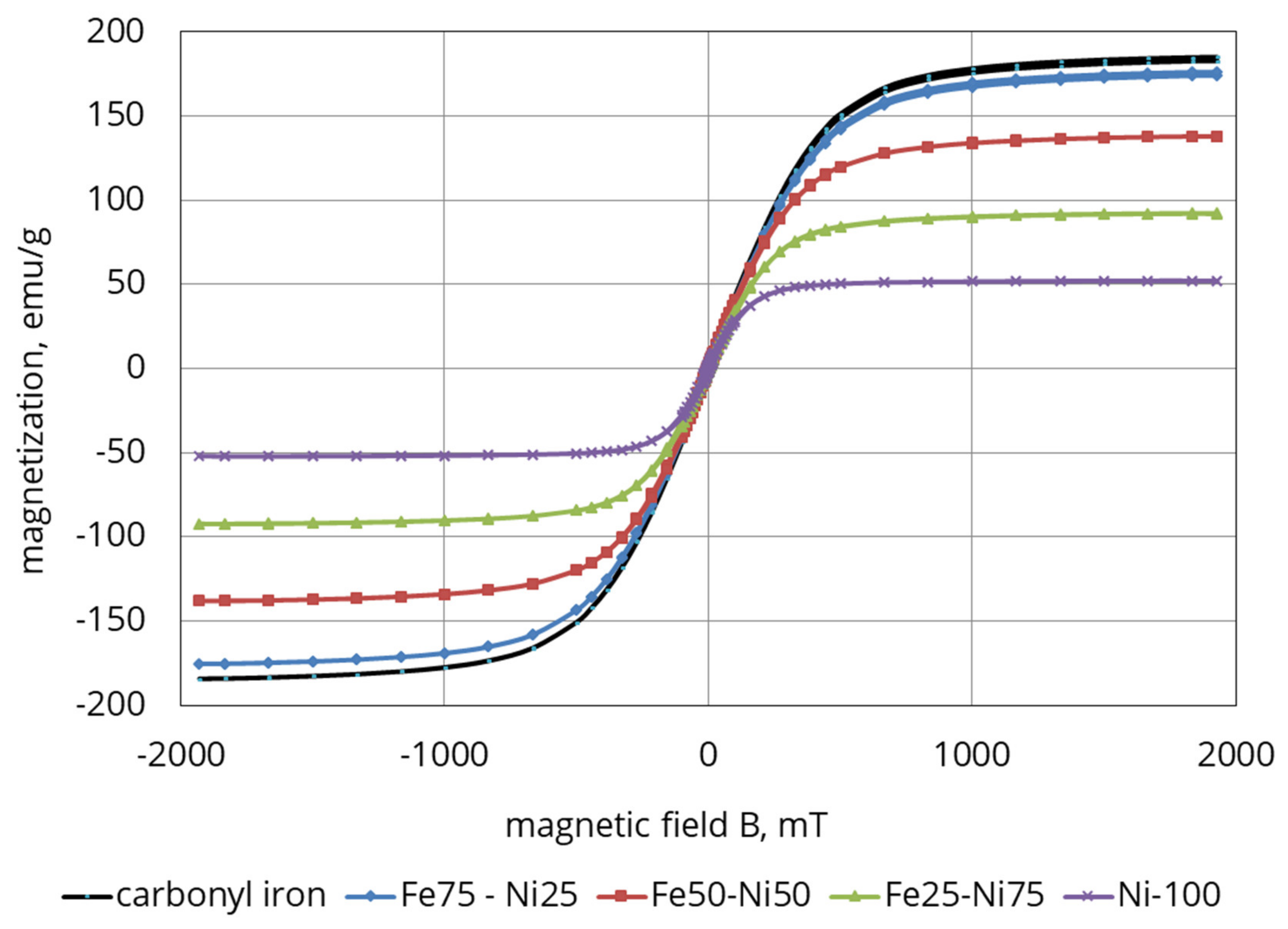
2.2. Properties of the Synthesized Permalloy Filler
2.3. Fabrication of Magnetoactive Elastomer
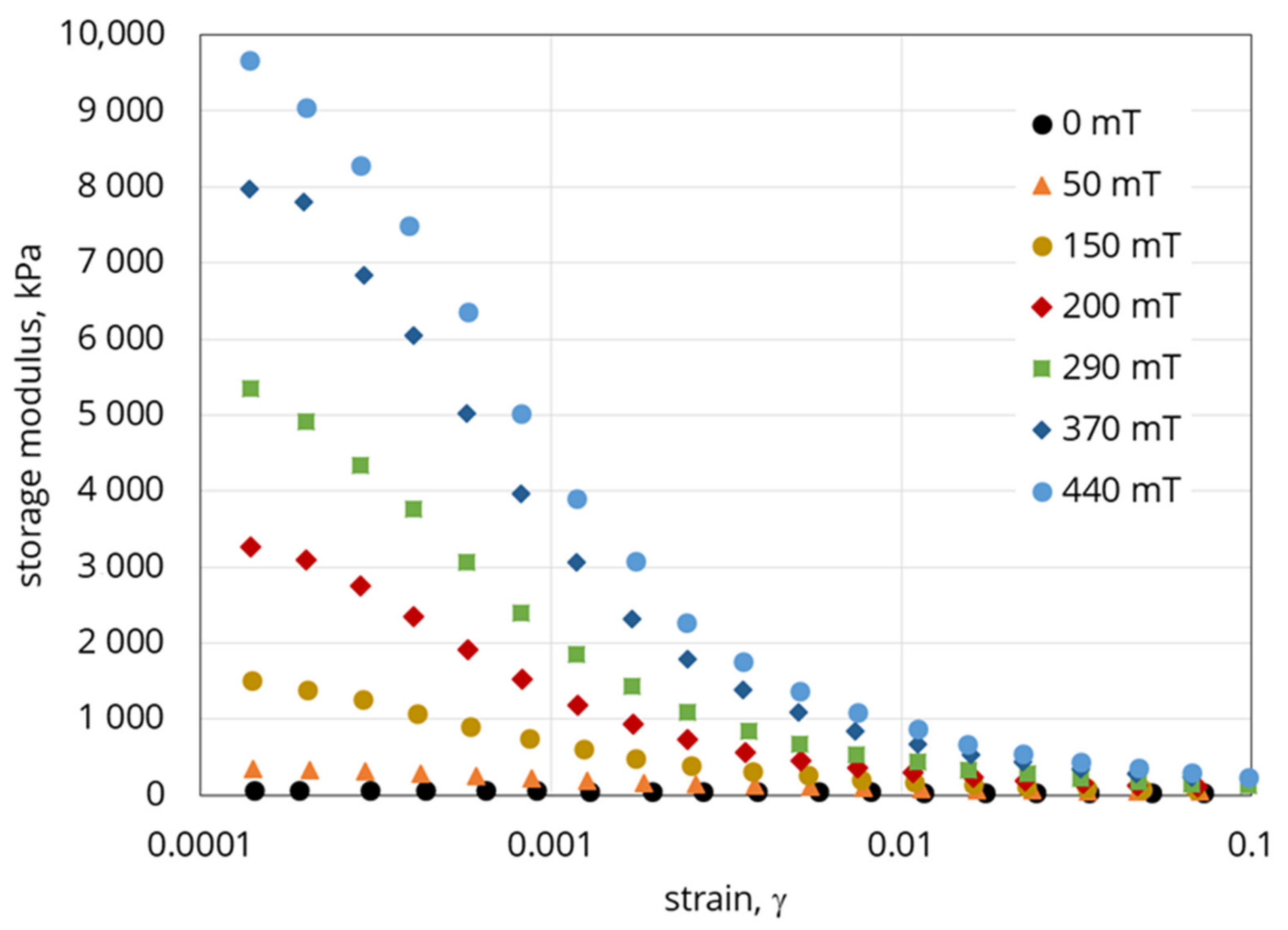
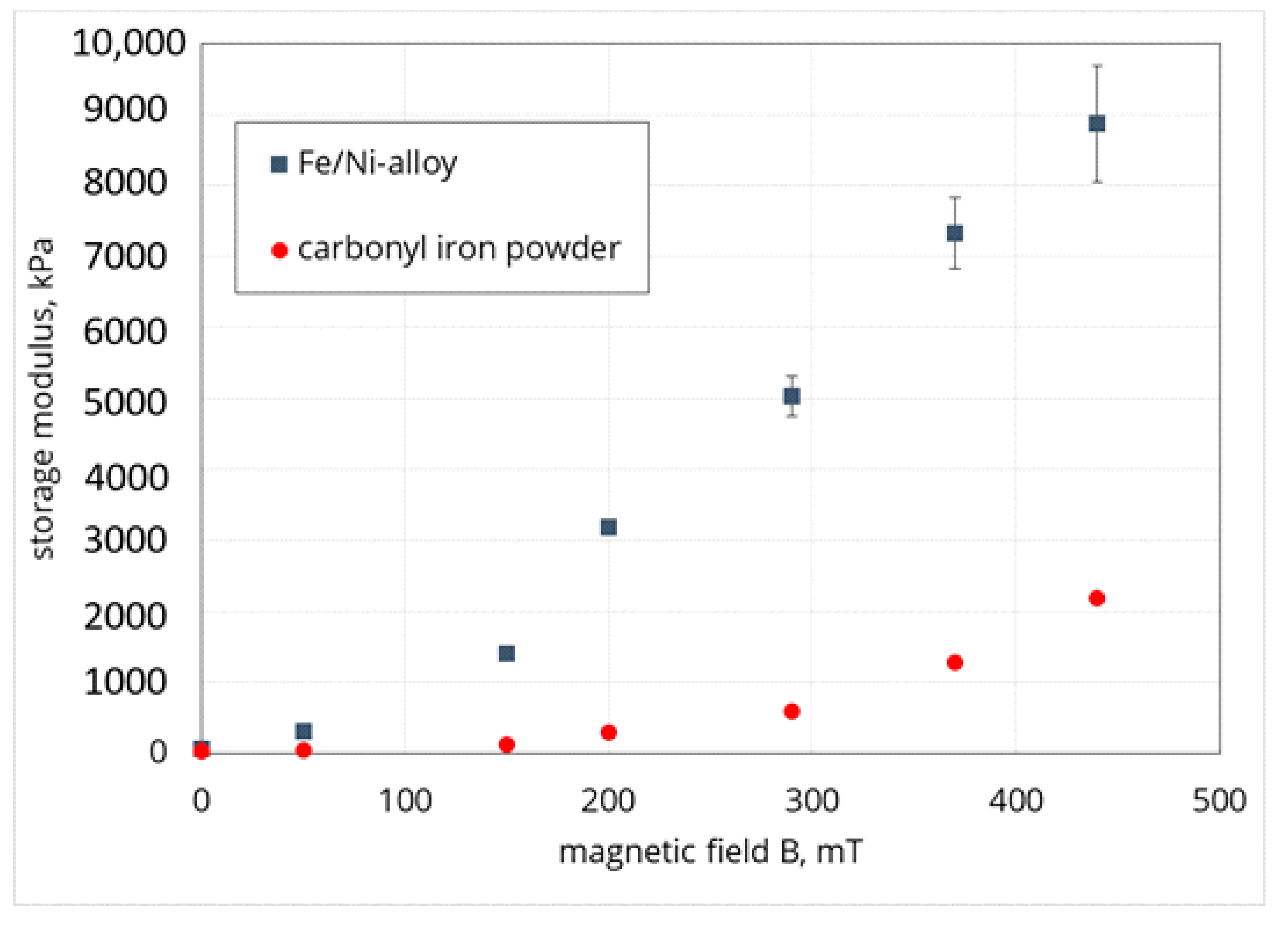
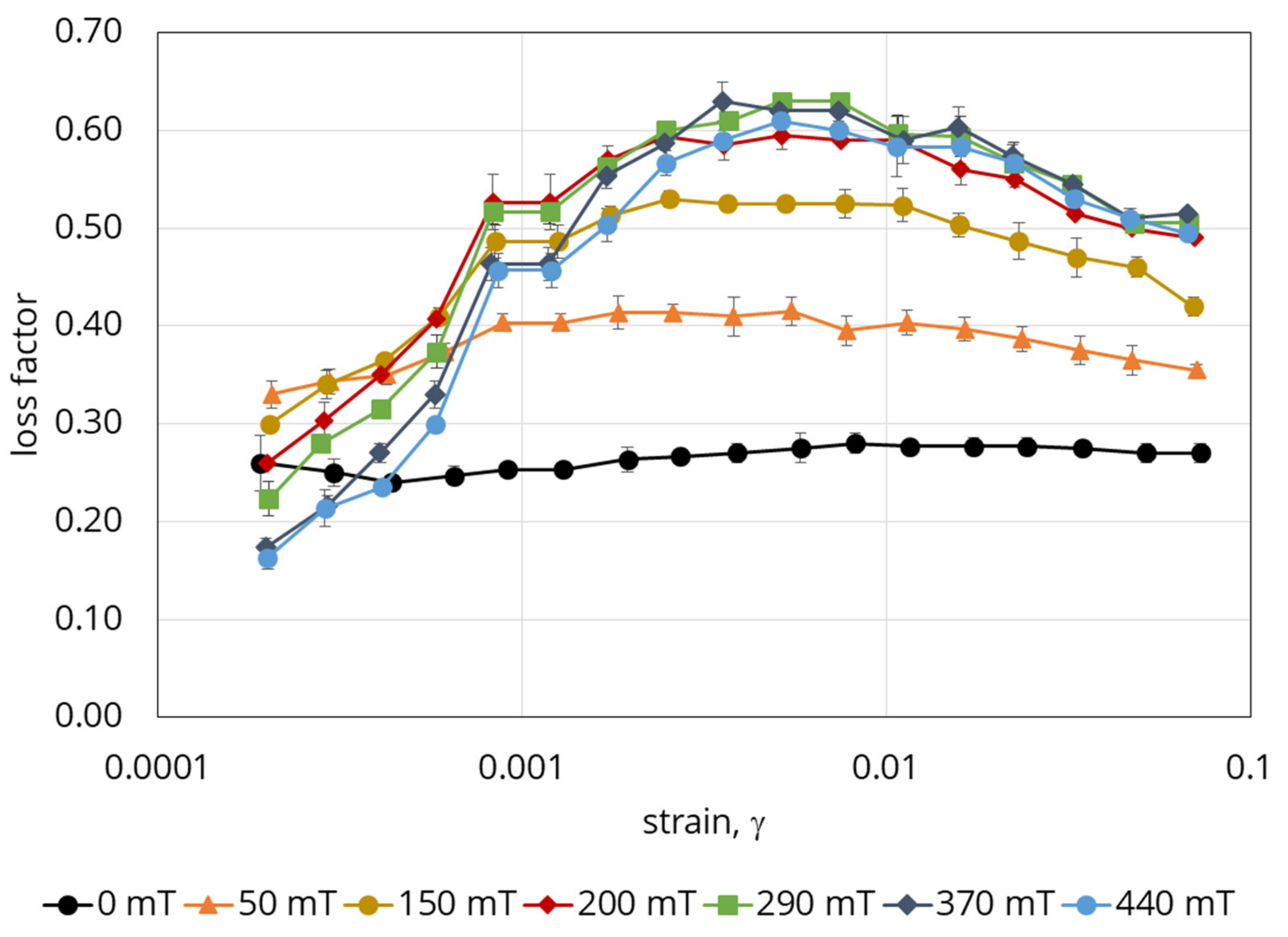
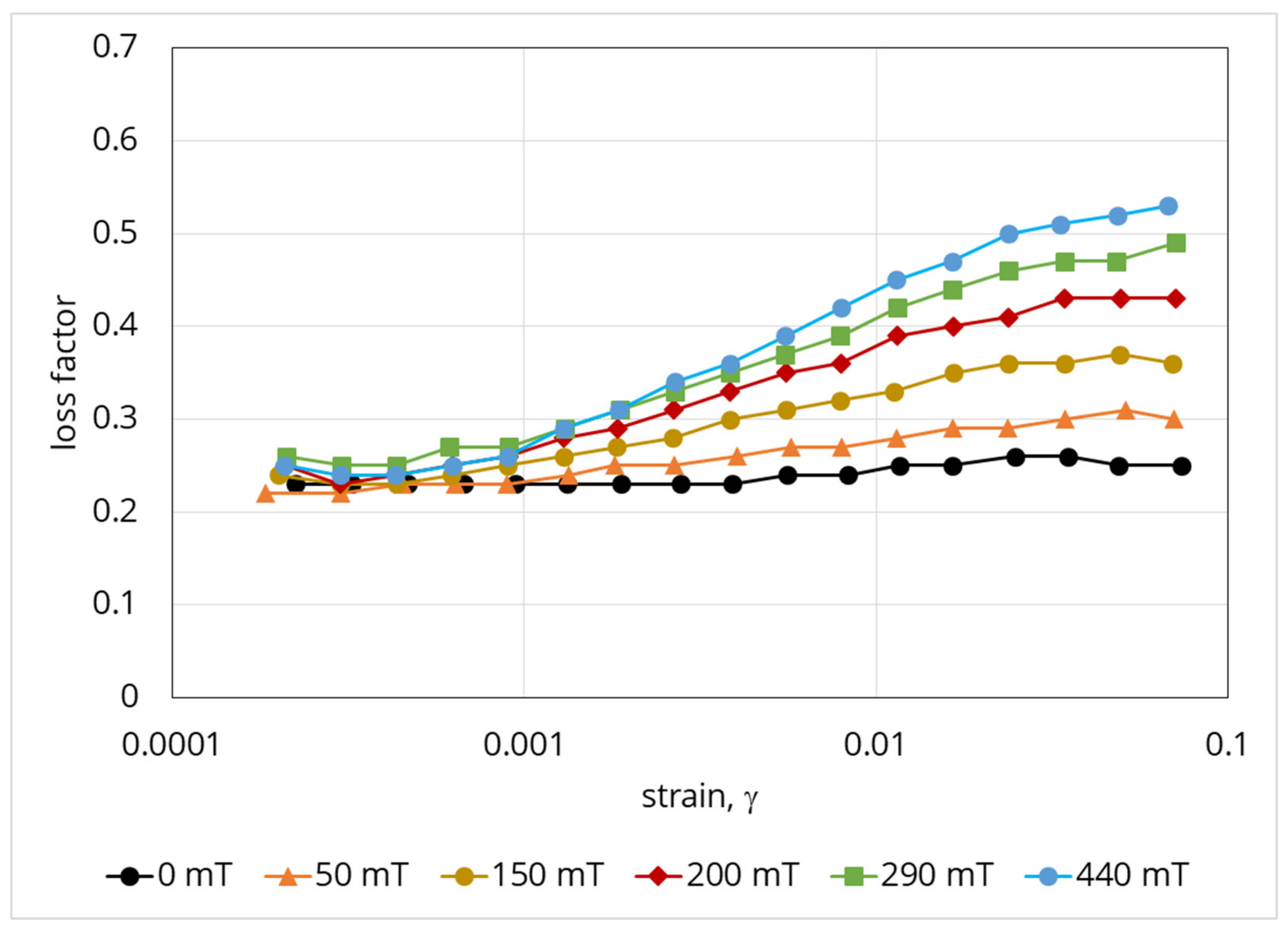
3. Magnetorheological Properties of MAE
4. Theoretical Model of the MR-Effect Internal Mechanism
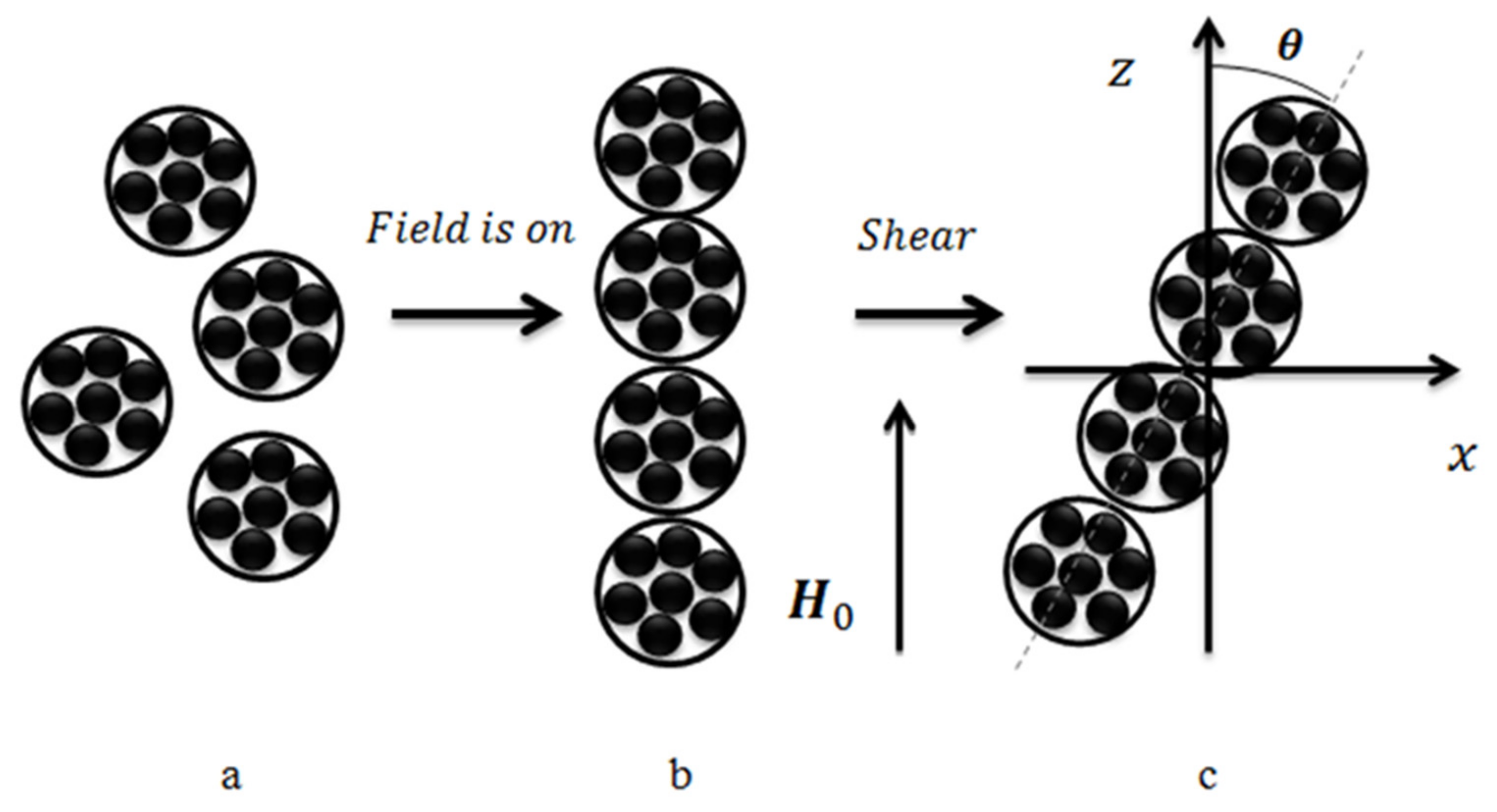
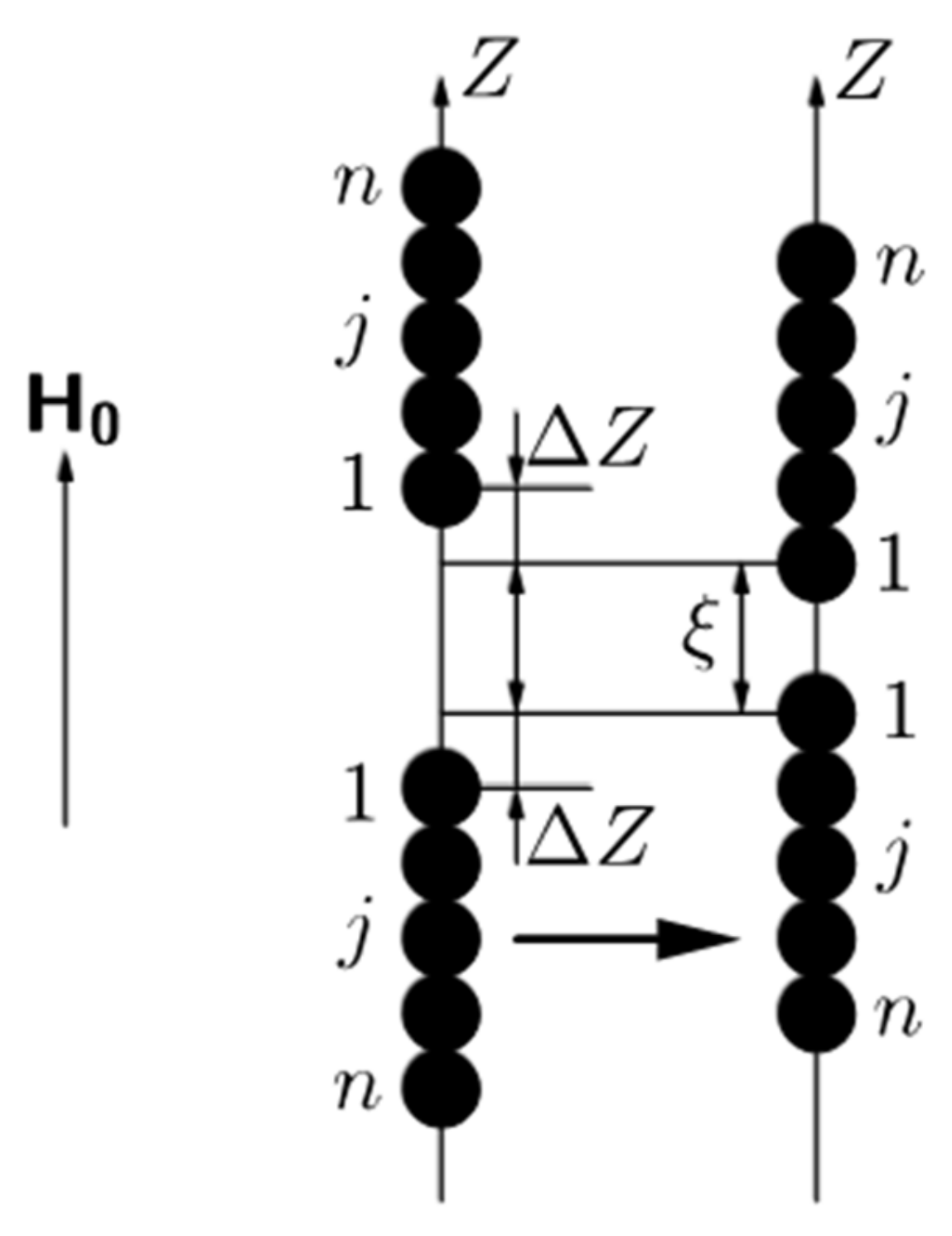
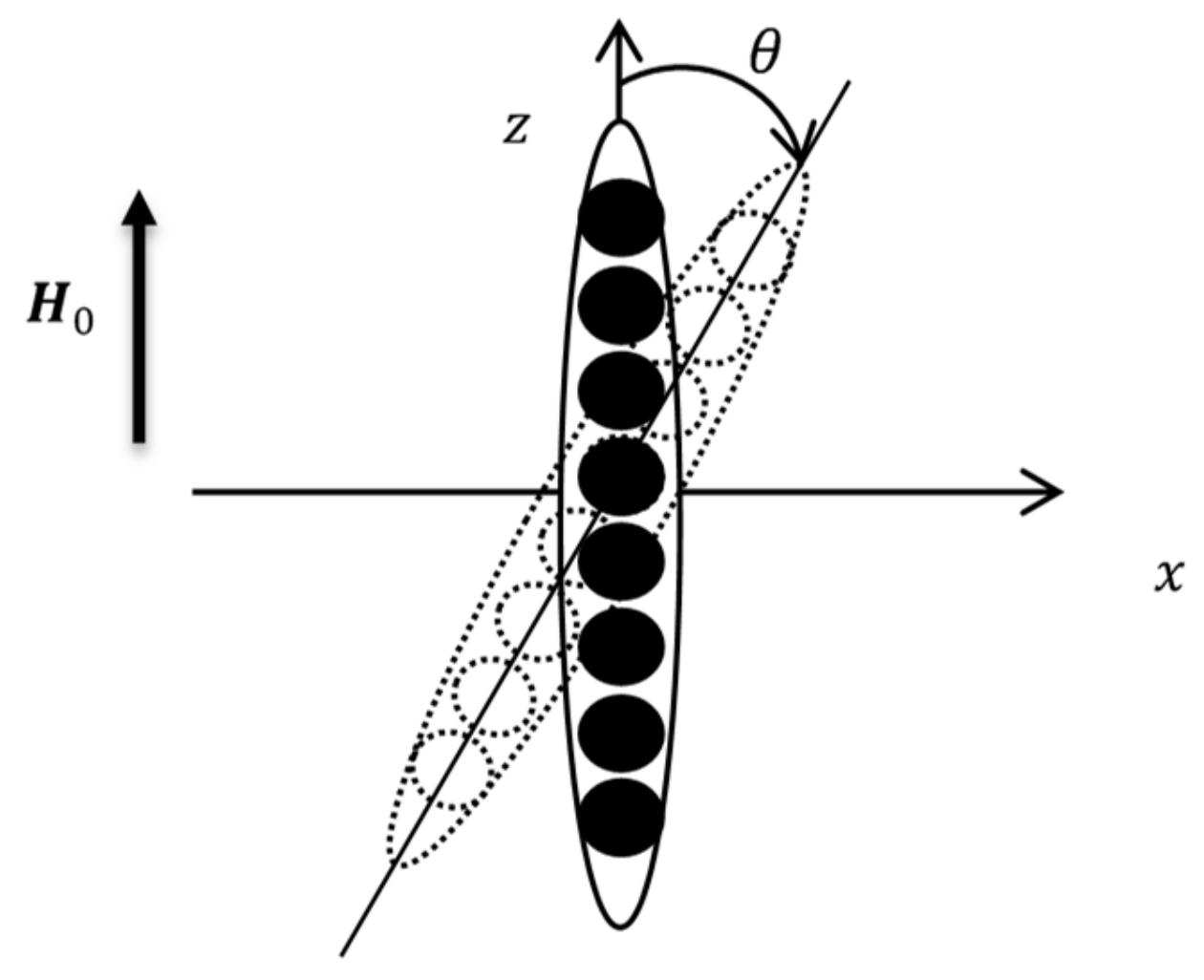
4.1. Chain Formation
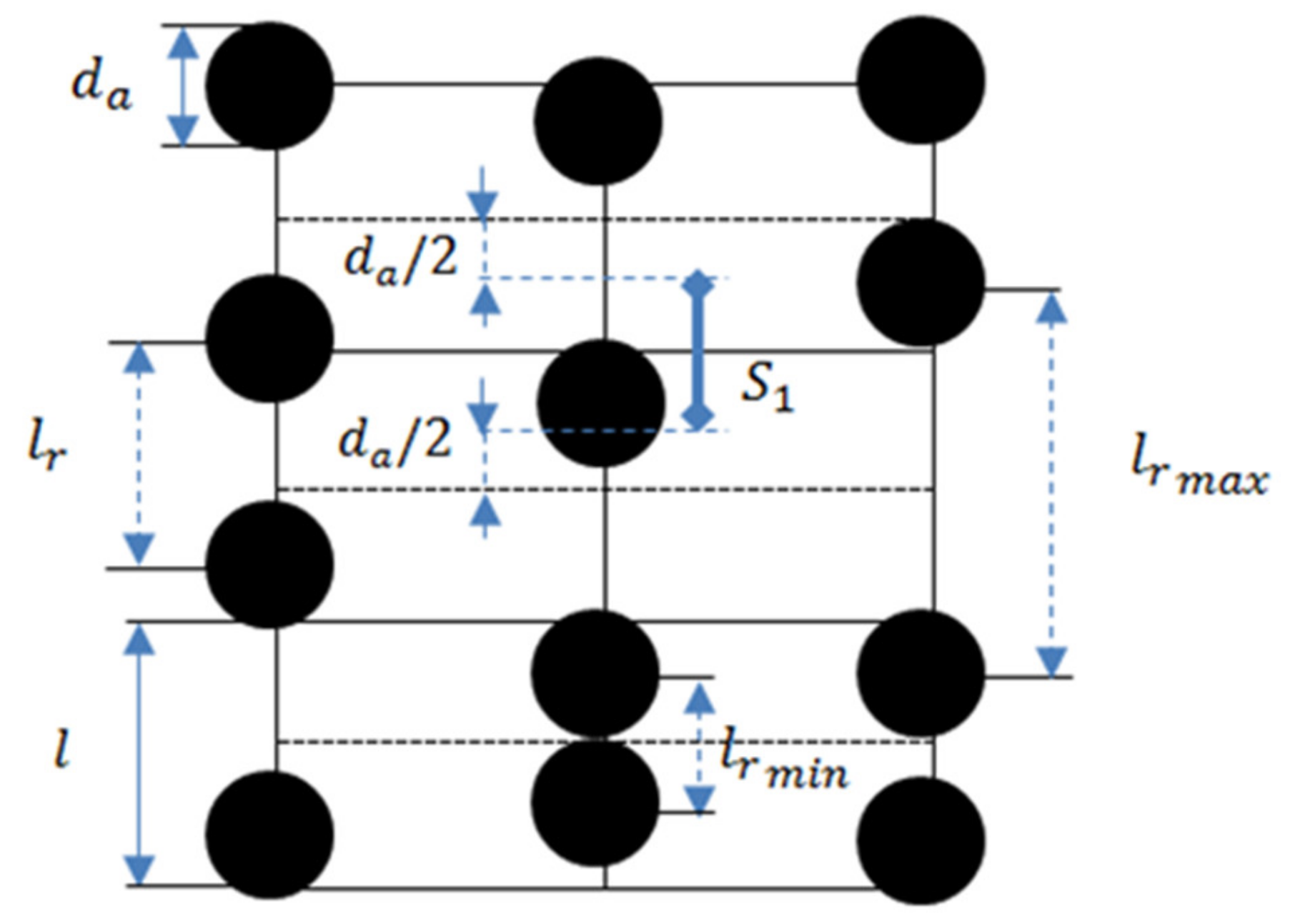
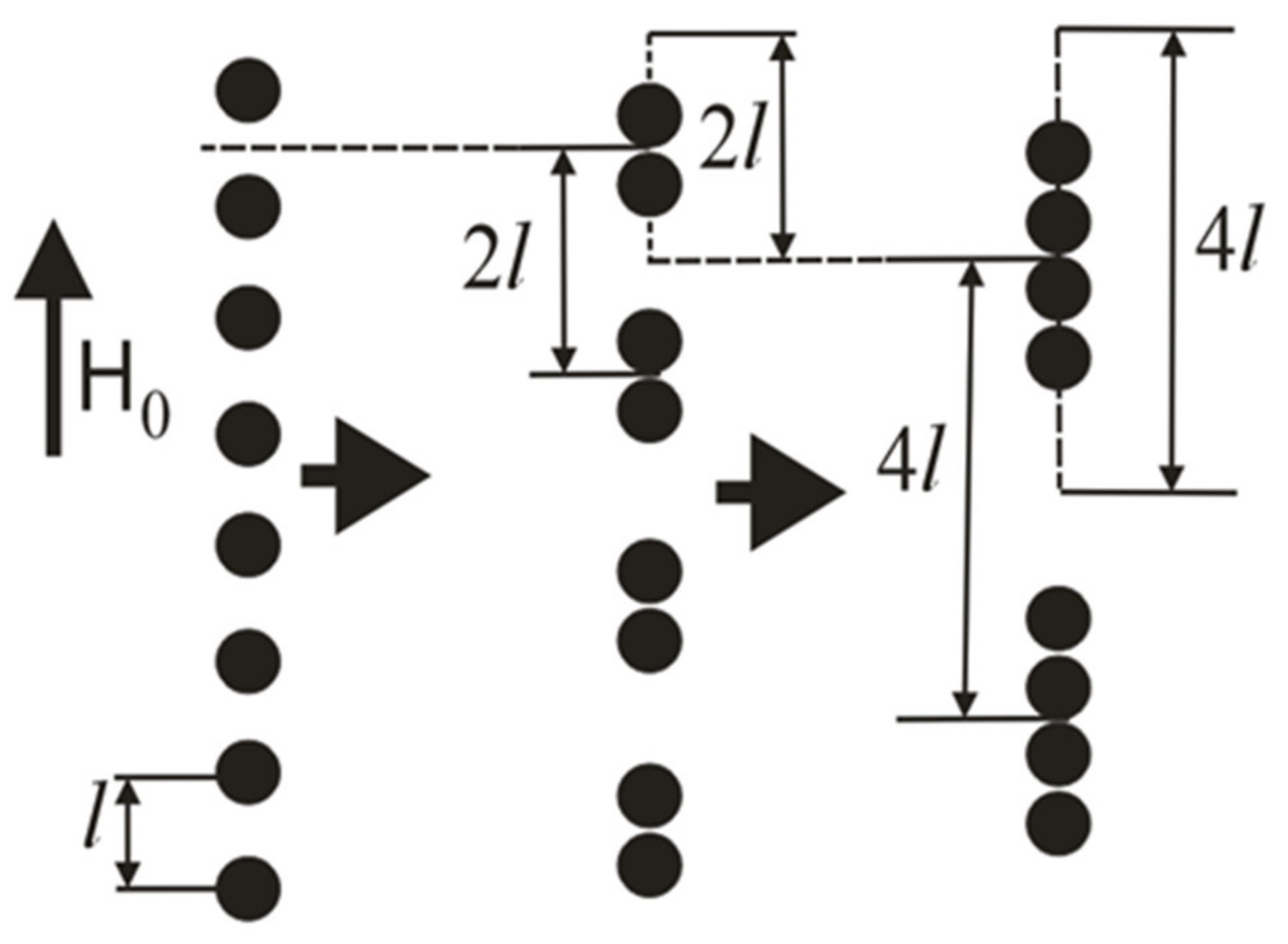
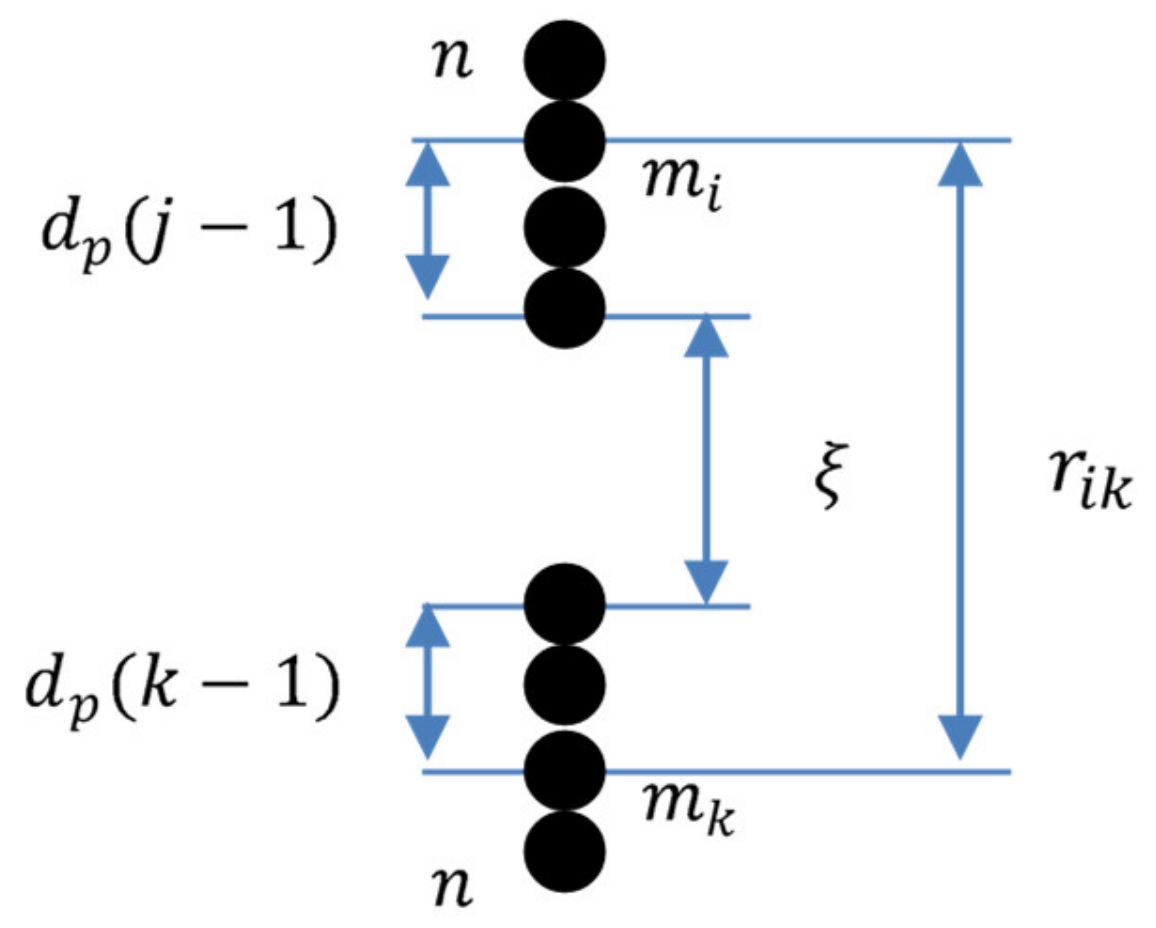
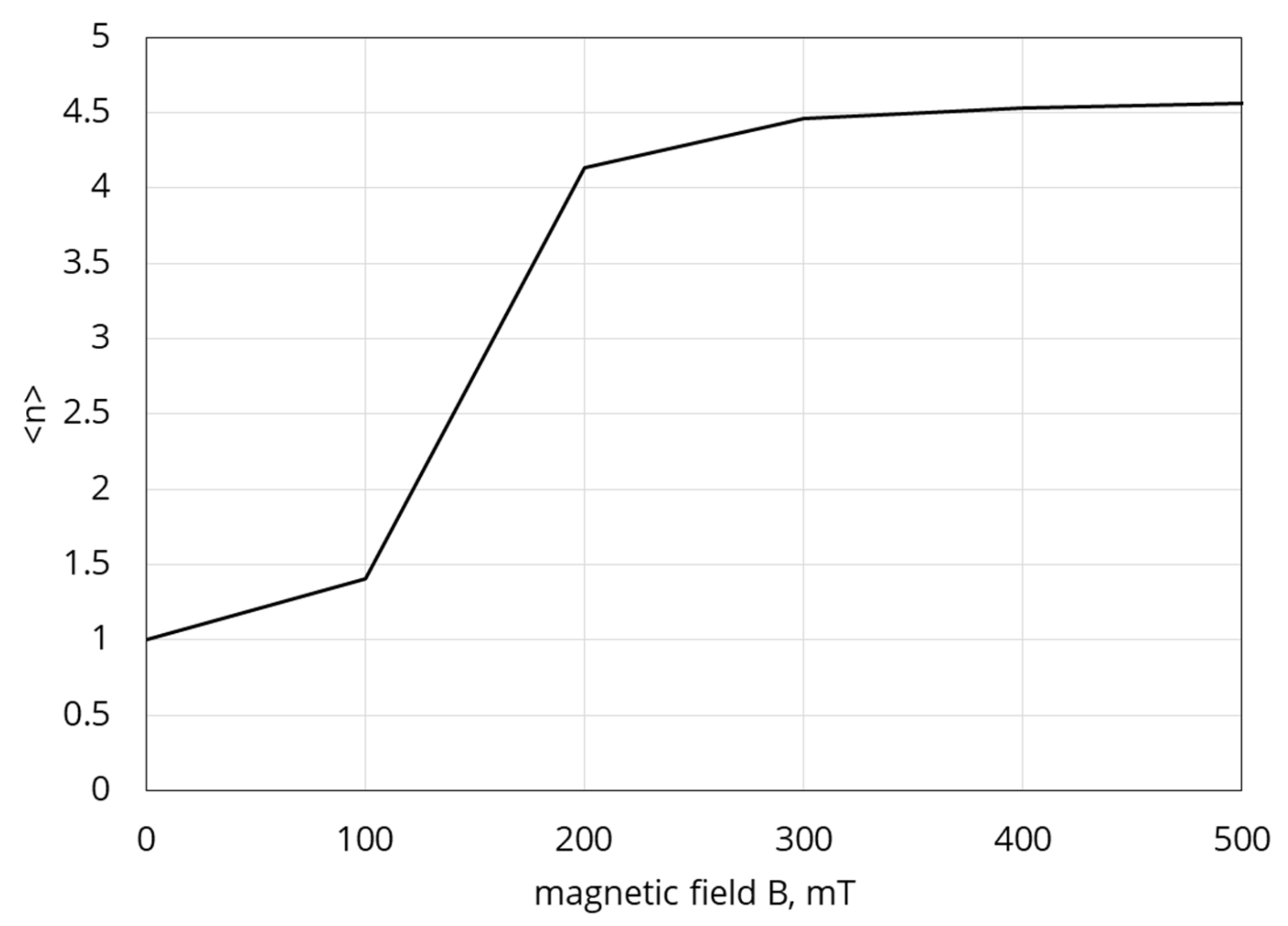
4.2. Determination of the Mean Agglomerate Number in the Chains
4.3. The Shear Modulus
5. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Liao, G.J.; Gong, X.L.; Xuan, S.H.; Kang, C.J.; Zong, L.H. Development of a real-time tunable stiffness and damping vibration isolator based on magnetorheological elastomer. J. Intell. Mater. Syst. Struct. 2012, 23, 25–33. [Google Scholar] [CrossRef]
- Liao, G.J.; Gong, X.L.; Kang, C.J.; Xuan, S.H. The design of an active–adaptive tuned vibration absorber based on magnetorheological elastomer and its vibration attenuation performance. Smart Mater. Struct. 2011, 20, 075015. [Google Scholar] [CrossRef]
- Hu, G.; Guo, M.; Li, W.; Du, H.; Alici, G. Experimental investigation of the vibration characteristics of a magnetorheological elastomer sandwich beam under non-homogeneous small magnetic fields. Smart Mater. Struct. 2011, 20, 127001. [Google Scholar] [CrossRef]
- Sun, S.S.; Chen, Y.; Yang, J.; Tian, T.F.; Deng, H.X.; Li, W.H.; Du, H.; Alici, G. The development of an adaptive tuned magnetorheological elastomer absorber working in squeeze mode. Smart Mater. Struct. 2014, 23, 075009. [Google Scholar] [CrossRef]
- Li, W.H.; Zhang, X.Z.; Du, H. Advances in Elastomers I: Blends and Interpenetrating Networks; Visakh, P.M., Thomas, S., Chandra, A.K., Mathew, A.P., Eds.; Springer: Berlin, Germany, 2013; pp. 357–374. [Google Scholar]
- Ahamed, R.; Choi, S.B.; Ferdaus, M.M. A state of art on magneto-rheological materials and their potential applications. J. Intell. Mater. Syst. Struct. 2018, 29, 2051–2095. [Google Scholar] [CrossRef]
- Sun, S.; Deng, H.; Yang, J.; Li, W.; Du, H.; Alici, G. Performance evaluation and comparison of magnetorheological elastomer absorbers working in shear and squeeze modes. J. Intell. Mater. Syst. Struct. 2015, 26, 1757–1763. [Google Scholar] [CrossRef]
- Kavlicoglu, B.; Wallis, B.; Sahin, H.; Liu, Y. Magnetorheological elastomer mount for shock and vibration isolation. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 6–10 March 2011; Volume 7977. [Google Scholar]
- Kim, H.K.; Kim, H.S.; Kim, Y.-K. Stiffness control of magnetorheological gels for adaptive tunable vibration absorber. Smart Mater. Struct. 2016, 26, 015016. [Google Scholar] [CrossRef]
- Kumbhar, S.B.; Chavan, S.P.; Gawad, S.S. Adaptive tuned vibration absorber based on magnetorheological elastomer-shape memory alloy composite. Mech. Syst. Signal Process. 2018, 100, 208–223. [Google Scholar] [CrossRef]
- Sun, S.S.; Yildirim, T.; Wu, J.; Yang, J.; Du, H.; Zhang, S.; Li, W. Design and verification of a hybrid nonlinear MRE vibration absorber for controllable broadband performance. Smart Mater. Struct. 2017, 26, 095039. [Google Scholar] [CrossRef] [Green Version]
- Du, G.; Huang, X.; Li, Y.; Ouyang, Q.; Wang, J. Performance of a semi-active/passive integrated isolator based on a magnetorheological elastomer and spring. Smart Mater. Struct. 2017, 26, 095024. [Google Scholar] [CrossRef]
- Kim, Y.-K.; Koo, J.-H.; Kim, K.-S.; Kim, S. Developing a real time controlled adaptive MRE-based tunable vibration absorber system for a linear cryogenic cooler. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Budapest, Hungary, 3–7 July 2011. [Google Scholar]
- Fu, J.; Zheng, X.; Yu, M.; Ju, B.X.; Yang, C.Y. A new magnetorheological elastomer isolator in shear-Compression mixed mode. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013. [Google Scholar]
- Xu, Z.; Yang, J.; Gu, Y.; Wu, Q.; Luo, Z.; Liu, H. Novel Active Tuned Mass Damper Control Method for Space Telescope. J. Guid. Control Dyn. 2016, 39, 677–684. [Google Scholar] [CrossRef]
- Yu, G.-J.; Wen, X.-X.; Du, C.-B.; Guo, F. The Mechanical Properties of a Smart Compression-Type Isolator Based on Magnetorheological Gel and Magnetorheological Elastomer. Adv. Mater. Sci. Eng. 2019, 2019, 7976580. [Google Scholar] [CrossRef] [Green Version]
- Boczkowska, A.; Awietjan, S.F. Tuning Active Magnetorheological Elastomers for Damping Applications. Mater. Sci. Forum 2010, 636, 766–771. [Google Scholar] [CrossRef]
- Rigbi, Z.; Jilken, L. The response of an elastomer filled with soft ferrite to mechanical and magnetic influences. J. Magn. Magn. Mater. 1983, 37, 267–276. [Google Scholar] [CrossRef]
- Shiga, T.; Okada, A.; Kurauchi, T. Magnetroviscoelastic behavior of composite gels. J. Appl. Polym. Sci. 1995, 58, 787–792. [Google Scholar] [CrossRef]
- Ginder, J.M.; Nichols, M.; Elie, L.D.; Stewart, W.M. Method and Apparatus for Reducing Brake Shudder. U.S. Patent 5,816,587, 6 October 1998. [Google Scholar]
- Jolly, M.R.; Carlson, J.D.; Munoz, B.C.; Bullions, T.A. The magnetoviscoelastic response of elastomer composites consisting of ferrous particles embedded in a polymer matrix. J. Intell. Mater. Syst. Struct. 1996, 7, 613–622. [Google Scholar] [CrossRef]
- Jolly, M.R.; Carlson, J.D.; Munoz, B.C. A model of the behaviour of magnetorheological materials. Smart Mater. Struct. 1996, 5, 607–614. [Google Scholar] [CrossRef]
- Demchuk, S.A.; Kuz’min, V.A. Viscoelastic properties of magnetorheological elastomers in the regime of dynamic deformation. J. Eng. Phys. Thermophys. 2002, 75, 396–400. [Google Scholar] [CrossRef]
- Bellan, C.; Bossis, G. Field dependence of viscoelastic properties of MR elastomers. Int. J. Mod. Phys. B 2002, 16, 2447–2453. [Google Scholar] [CrossRef]
- Zhou, G.Y. Shear properties of a magnetorheological elastomer. Smart Mater. Struct. 2003, 12, 139–146. [Google Scholar] [CrossRef]
- Kallio, M. The Elastic and Damping Properties of Magnetorheological Elastomers. Ph.D. Thesis, Tampere University of Technology, VTT Technical Research Centre of Finland, Tampere, Finland, 2005. [Google Scholar]
- Zhou, G.Y. Complex shear modulus of a magnetorheological elastomer. Smart Mater. Struct. 2004, 13, 1203–1210. [Google Scholar] [CrossRef]
- Coquelle, E.; Bossis, G. Magnetostriction and piezoresistivity in elastomers filled with magnetic particles. J. Adv. Sci. 2005, 17, 132–138. [Google Scholar] [CrossRef]
- Gong, X.L.; Zhang, X.Z.; Zhang, P.Q. Fabrication and characterization of isotropic magnetorheological elastomers. Polym. Test. 2005, 24, 669–676. [Google Scholar] [CrossRef]
- Lerner, A.A.; Cunefare, K.A. Performance of MRE-based Vibration Absorbers. J. Intell. Mater. Syst. Struct. 2008, 19, 551–563. [Google Scholar] [CrossRef]
- Böse, H. Viscoelastic properties of silicone-based magnetorheological elastomers. Int. J. Mod. Phys. B 2007, 21, 4790–4797. [Google Scholar] [CrossRef]
- Schrittesser, B.; Major, Z.; Filipcsei, G. Characterization of the dynamic mechanical behavior of magneto-elastomers. J. Phys. Conf. Ser. 2009, 149, 012096. [Google Scholar] [CrossRef]
- Kchit, N.; Lancon, P.; Bossis, G. Thermoresistance and giant magnetoresistance of magnetorheological elastomers. J. Phys. D Appl. Phys. 2009, 42, 42. [Google Scholar] [CrossRef]
- An, H.; Picken, S.J.; Mendes, E. Enhanced hardening of soft self-assembled copolymer gels under homogeneous magnetic fields. Soft Matter 2010, 6, 4497–4503. [Google Scholar] [CrossRef]
- Hoang, N.; Zhang, N.; Du, H. Adaptive tunable vibration absorber using a new magnetorheological elastomer for vehicular powertrain transient vibration reduction. Smart Mater. Struct. 2010, 20, 015019. [Google Scholar] [CrossRef]
- Yu, M.; Zhu, M.; Fu, J.; Yang, P.A.; Qi, S. A dimorphic magnetorheological elastomer incorporated with Fe nano-flakes modified carbonyl iron particles: Preparation and characterization. Smart Mater. Struct. 2015, 24, 115021. [Google Scholar] [CrossRef]
- Schubert, G.; Harrison, P. Large-strain behaviour of magneto-rheological elastomers tested under uniaxial compression and tension, and pure shear deformations. Polym. Test. 2015, 42, 122–134. [Google Scholar] [CrossRef]
- Khairi, M.H.A.; Fatah, A.Y.A.; Mazlan, S.A.; Ubaidillah, U.; Nordin, N.A.; Ismail, N.I.N.; Aziz, S.A.A. Enhancement of particle alignment using silicone oil plasticizer and its effects on the field-dependent properties of magnetorheological elastomers. Int. J. Mol. Sci. 2019, 20, 4085. [Google Scholar] [CrossRef] [Green Version]
- Sebald, G.; Nakano, M.; Lallart, M.; Tian, T.; Diguet, G.; Cavaille, J.-Y. Energy conversion in magneto-rheological elastomers. Sci. Technol. Adv. Mater. 2017, 18, 766–778. [Google Scholar] [CrossRef] [Green Version]
- Winger, J.; Schümann, M.; Kupka, A.; Odenbach, S. Influence of the particle size on the magnetorheological effect of magnetorheological elastomers. J. Magn. Magn. Mater. 2019, 481, 176–1821. [Google Scholar] [CrossRef]
- Stepanov, G.V.; Borin, D.Y.; Raikher, Y.L.; Melenev, P.V.; Perov, N.S. Motion of ferroparticles inside the polymeric matrix in magnetoactive elastomers. J. Phys. Condens. Matter 2008, 20, 204121. [Google Scholar] [CrossRef]
- Chertovich, A.V.; Stepanov, G.V.; Kramarenko, E.Y.; Khokhlov, A.R. New Composite Elastomers with Giant Magnetic Response. Macromol. Mater. Eng. 2010, 295, 336–341. [Google Scholar] [CrossRef]
- Stepanov, G.V.; Borin, D.Y.; Odenbach, S. Magnetorheological effect of magneto-active elastomers containing large particles. J. Phys. Conf. Ser. 2009, 149, 012098. [Google Scholar] [CrossRef]
- Stoll, A.; Mayer, M.; Monkman, G.J.; Shamonin, M. Evaluation of highly compliant magneto-active elastomers with colossal magnetorheological response. J. Appl. Polym. Sci. 2014, 131, 39793. [Google Scholar] [CrossRef]
- Böse, H.; Röder, R. Magnetorheological Elastomers with High Variability of Their Mechanical Properties. J. Phys. Conf. Ser. 2009, 149, 012090. [Google Scholar] [CrossRef]
- Molchanov, V.S.; Stepanov, G.V.; Vasiliev, V.G.; Kramarenko, E.Y.; Khokhlov, A.R.; Xu, Z.-D.; Guo, Y.-Q. Viscoelastic Properties of Magnetorheological Elastomers for Damping Applications. Macromol. Mater. Eng. 2014, 299, 1116–1125. [Google Scholar] [CrossRef]
- Abramchuk, S.S.; Grishin, D.A.; Kramarenko, E.Y.; Stepanov, G.V.; Khokhlov, A.R. Effect of a homogeneous magnetic field on the mechanical behavior of soft magnetic elastomers under compression. Polym. Sci. Ser. A 2006, 48, 138. [Google Scholar] [CrossRef]
- Stepanov, G.V.; Abramchuk, S.S.; Grishin, D.A.; Nikitin, L.V.; Kramarenko, E.Y.; Khokhlov, A.R. Effect of a homogeneous magnetic field on the viscoelastic behavior of magnetic elastomers. Polymer 2007, 48, 488. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Stepanov, G.V.; Shamonin, M.; Monkman, G.J.; Kramarenko, E.Y. Magnetorheological behavior of magnetoactive elastomers filled with bimodal iron and magnetite particles. Smart Mater. Struct. 2017, 26, 035019. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Stepanov, G.V.; Shamonin, M.; Monkman, G.J.; Khokhlov, A.R.; Kramarenko, E.Y. Hysteresis of the viscoelastic properties and the normal force in magnetically and mechanically soft magnetoactive elastomers: Effects of filler composition, strain amplitude and magnetic field. Polymer 2015, 76, 191–202. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Ecker, E.; Stepanov, G.V.; Shamonin, M.; Monkman, G.J.; Kramarenko, E.Y.; Khokhlov, A.R. Experimental Study of Magnetic Field Enhanced Payne Effect in Magnetorheological Elastomers. Soft Matter 2014, 10, 8765–8776. [Google Scholar] [CrossRef]
- Stepanov, G.V.; Borin, D.Y.; Kramarenko, E.Y.; Bogdanov, V.V.; Semerenko, D.A.; Storozhenko, P.A. Magnetoactive Elastomer Based on Magnetically Hard Filler: Synthesis and Study of Viscoelastic and Damping Properties. Polym. Sci. Ser. A 2014, 56, 603–613. [Google Scholar] [CrossRef]
- Gila-Vilchez, C.; Duran, J.D.G.; Gonzalez-Caballero, F.; Zubarev, A.; Lopez-Lopez, M.T. Magnetorheology of alginate ferrogels. Smart Mater. Struct. 2019, 28, 035018. [Google Scholar] [CrossRef]
- Gila-Vilchez, C.; Bonhome-Espinosa, A.B.; Kuzhir, P.; Zubarev, A.; Duran, J.D.G.; Lopez-Lopez, M.T. Rheology of magnetic alginate hydrogels. J. Rheol. 1993, 62, 1083–1096. [Google Scholar] [CrossRef] [Green Version]
- Rose, S.; Prevoteau, A.; Elziere, P.; Hourdet, D.; Marcellan, D.; Leibler, L. Nanoparticle solutions as adhesives for gels and biological tissues. Nature 2013, 505, 382–385. [Google Scholar] [CrossRef]
- Cvek, M.; Zahoranova, A.; Mrlik, M.; Sramkova, P.; Minarik, A.; Sedlacik, M. Poly(2-oxazoline)-based magnetic hydrogels: Synthesis, performance and cytotoxicity. Colloids Surf. B Biointerfaces 2020, 190, 110912. [Google Scholar]
- Zubarev, A.Y.; Chirikov, D.N.; Borin, D.Y.; Stepanov, G.V. Hysteresis of the magnetic properties of soft magnetic gels. Soft Matter 2016, 12, 6473–6480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- See, H.; Doi, M. Aggregation Kinetics in Electro-Rheological Fluids. J. Phys. Soc. Jpn. 1991, 60, 2778. [Google Scholar] [CrossRef]
- Hill, T.L. Statistical Mechanics–Principles and Selected Applications; Dover Publications: Mineola, NY, USA, 2013. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Electrodynamics of Continuous Media; Pergamon: New York, NY, USA, 1960. [Google Scholar]
- Bozorth, R.M. Ferromagnetism; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Rosensweig, R.E. Ferrohydrodynamics; Cambridge University Press: New York, NY, USA, 1985. [Google Scholar]
- Doi, M.; Edwards, S.F. The Theory of Polymer Dynamics; Oxford University Press: New York, NY, USA, 1986. [Google Scholar]
- Pokrovskii, V.N. Statistical Mechanics of Dilute Suspensions; Nauka: Moscow, Russia, 1978. [Google Scholar]
- Krieger, I.M.; Dougherty, T.J. A mechanism for non-Newtonian flow in suspension of rigid spheres. Trans. Soc. Rheol. 1959, 3, 137–152. [Google Scholar] [CrossRef]
- Barnes, H.A.; Hutton, J.F.; Walters, K. An Introduction to Rheology; Elsevier: Amsterdam, The Netherlands, 1989. [Google Scholar]
- Batchelor, G. The stress generated in a non-dilute suspension of elongated particles by pure straining motion. J. Fluid Mech. 1971, 46, 813–829. [Google Scholar] [CrossRef]
- Günther, D.; Borin, D.; Günther, S.; Odenbach, S. X-ray micro-tomographic characterization of field-structured magnetorheological elastomers. Smart Mater. Struct. 2012, 21, 015005. [Google Scholar] [CrossRef]
- Borin, D. Targeted patterning of magnetic microparticles in a polymer composite. Phil. Trans. R. Soc. A 2020, 378, 20190256. [Google Scholar] [CrossRef] [PubMed] [Green Version]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borin, D.; Stepanov, G.; Musikhin, A.; Zubarev, A.; Bakhtiiarov, A.; Storozhenko, P. Magnetorheological Effect of Magnetoactive Elastomer with a Permalloy Filler. Polymers 2020, 12, 2371. https://doi.org/10.3390/polym12102371
Borin D, Stepanov G, Musikhin A, Zubarev A, Bakhtiiarov A, Storozhenko P. Magnetorheological Effect of Magnetoactive Elastomer with a Permalloy Filler. Polymers. 2020; 12(10):2371. https://doi.org/10.3390/polym12102371
Chicago/Turabian StyleBorin, Dmitry, Gennady Stepanov, Anton Musikhin, Andrey Zubarev, Anton Bakhtiiarov, and Pavel Storozhenko. 2020. "Magnetorheological Effect of Magnetoactive Elastomer with a Permalloy Filler" Polymers 12, no. 10: 2371. https://doi.org/10.3390/polym12102371
APA StyleBorin, D., Stepanov, G., Musikhin, A., Zubarev, A., Bakhtiiarov, A., & Storozhenko, P. (2020). Magnetorheological Effect of Magnetoactive Elastomer with a Permalloy Filler. Polymers, 12(10), 2371. https://doi.org/10.3390/polym12102371