
Using Waveguides to Model the Dynamic Stiffness of Pre-Compressed Natural Rubber Vibration Isolators



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Vibration Isolator
2.2. Kinematics
2.3. Equivalent Transformation
2.4. Quasi-Static Natural Rubber Isolator Pre-Compression
2.5. General Solution for the Superimposed Motion
2.6. Boundary Conditions
3. Results and Discussion
3.1. Natural Rubber Material
3.2. Model Results
3.3. Finite Element Comparison
3.4. Convergence Properties
3.5. Edge Boundary Condition Influence
3.6. Displacement and Stress Fields
4. Conclusions
- The dynamic stiffness solutions are shown to converge for a moderately high number of modes—such as for the studied vibration isolators within the considered frequency range 20 to 2000 Hz and pre-compression range up to 20%;
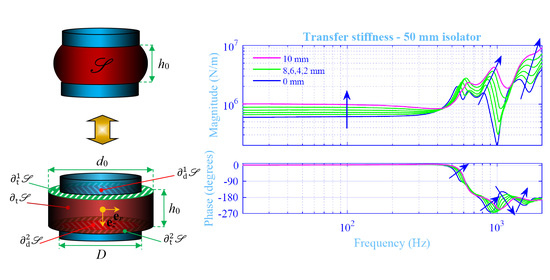
- The dynamic stiffness is found to depend strongly on the frequency displaying resonance phenomena such as peaks and troughs;
- The dynamic stiffness is found to depend strongly on the pre-compression, displaying low-frequency stiffness magnitude stiffness increase in addition to peak and trough shifts with increased pre-compressions;
- The waveguide model is shown to yield dynamic stiffness results close to those of the non-linear finite element method;
- The non-linear finite element method was previously shown to give results close to those of the experiments for similar natural rubber vibration isolators [11];
- The applied Mittag–Leffler shear relaxation function was previously shown to give shear modulus results close to those of the experiments for the same natural rubber material as studied in this paper [20]; and
- The free-free cylinder edge boundary condition is shown to result in superior pre-compressed dynamic stiffness results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gent, A.N. (Ed.) Engineering with Rubber-How to Design Rubber Components, 3rd ed.; Hanser Publishers: Cincinnati, OH, USA, 2012. [Google Scholar]
- Snowdon, J.C. Vibration isolation: Use and characterization. J. Acoust. Soc. Am. 1979, 66, 1245–1274. [Google Scholar] [CrossRef]
- Mead, D.J. Passive Vibration Control; John Wiley and Sons Ltd.: Chichester, UK, 1998. [Google Scholar]
- Adem, J. On the axially-symmetric steady wave propagation in elastic circular rods. Quart. Appl. Math. 1954, 12, 261–275. [Google Scholar] [CrossRef] [Green Version]
- Du, Y.; Burdisso, R.A.; Nikolaidis, E.; Tiwari, D. Effects of isolators internal resonances on force transmissibility and radiated noise. J. Sound Vib. 2003, 268, 751–778. [Google Scholar] [CrossRef]
- Kari, L. Stiffness scaling laws and vibration isolators. Appl. Acoust. 2002, 63, 583–594. [Google Scholar] [CrossRef]
- Kari, L. On the waveguide modelling of dynamic stiffness of cylindrical vibration isolators. Part I: The model, solution and experimental comparison. J. Sound Vib. 2001, 244, 211–233. [Google Scholar] [CrossRef]
- Kari, L. On the waveguide modelling of dynamic stiffness of cylindrical vibration isolators. Part II: The dispersion relation solution, convergence analysis and comparison with simple models. J. Sound Vib. 2001, 244, 235–257. [Google Scholar] [CrossRef]
- Zdunek, A.B. Determination of material response functions for prestrained rubbers. Rheol. Acta 1992, 31, 575–591. [Google Scholar] [CrossRef]
- Zdunek, A.B. Theory and computation of the steady state harmonic response of viscoelastic rubber parts. Comput. Methods Appl. Mech. Eng. 1993, 105, 63–92. [Google Scholar] [CrossRef]
- Kari, L. On the dynamic stiffness of preloaded vibration isolators in the audible frequency range: Modeling and experiments. J. Acoust. Soc. Am. 2003, 113, 1909–1921. [Google Scholar] [CrossRef] [PubMed]
- Bagley, R.L.; Torvik, P.J. Fractional calculus—A different approach to the analysis of viscoelastically damped structures. AIAA J. 1983, 21, 741–748. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. A theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 1983, 27, 201–210. [Google Scholar] [CrossRef]
- Koeller, R.C. Applications of fractional calculus to the theory of viscoelasticity. J. Appl. Mech. 1984, 51, 299–307. [Google Scholar] [CrossRef]
- Torvik, P.J.; Bagley, R.L. On the appearance of the fractional derivative in the behavior of real materials. J. Appl. Mech. 1984, 51, 294–298. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. On the fractional calculus model of viscoelastic behavior. J. Rheol. 1986, 30, 133–155. [Google Scholar] [CrossRef]
- Pritz, T. Analysis of four-parameter fractional derivative model of real solid materials. J. Sound Vib. 1996, 195, 103–115. [Google Scholar] [CrossRef]
- Enelund, M.; Olsson, P. Damping described by fading memory—Analysis andapplication to fractional derivative models. Int. J. Solids Struct. 1999, 36, 939–970. [Google Scholar] [CrossRef]
- Pritz, T. Verification of local Kramers–Kronig relations for complex modulus by means of fractional derivative model. J. Sound Vib. 1999, 228, 1145–1165. [Google Scholar] [CrossRef]
- Kari, L.; Eriksson, P.; Stenberg, B. Dynamic stiffness of natural rubber cylinders in the audible frequency range using wave guides. Kaut. Gummi Kunstst. 2001, 54, 106–111. [Google Scholar]
- Surguladze, T.A. On certain applications of fractional calculus to viscoelasticity. J. Math. Sci. 2002, 112, 4517–4557. [Google Scholar] [CrossRef]
- Sjöberg, M.; Kari, L. Non-linear behavior of a rubber isolator system using fractional derivatives. Veh. Syst. Dyn. 2002, 37, 217–236. [Google Scholar] [CrossRef]
- Kari, L. Dynamic stiffness matrix of a long rubber bush mounting. Rubber Chem. Technol. 2002, 75, 747–770. [Google Scholar] [CrossRef]
- Adolfsson, K.; Enelund, M. Fractional derivative viscoelasticity at large deformations. Nonlinear Dyn. 2003, 33, 301–321. [Google Scholar] [CrossRef]
- Sjöberg, M.; Kari, L. Nonlinear isolator dynamics at finite deformations: An effective hyperelastic, fractional derivative, generalized friction model. Nonlinear Dyn. 2003, 33, 323–336. [Google Scholar] [CrossRef]
- Kari, L. Audible-frequency stiffness of a primary suspension isolator on a high speed tilting bogie. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2003, 217, 47–62. [Google Scholar] [CrossRef]
- Pritz, T. Five-parameter fractional derivative model for polymeric damping materials. J. Sound Vib. 2003, 265, 935–952. [Google Scholar] [CrossRef]
- Adolfsson, K.; Enelund, M.; Olsson, P. On the fractional order model of viscoelasticity. Mech. Time Depend. Mater. 2005, 9, 15–34. [Google Scholar] [CrossRef]
- Coja, M.; Kari, L. Axial audio-frequency stiffness of a bush mounting—The waveguide solution. Appl. Math. Modell. 2007, 31, 38–53. [Google Scholar] [CrossRef]
- García Tárrago, M.J.; Kari, L.; Vinolas, J.; Gil-Negrete, N. Frequency and amplitude dependence of the axial and radial stiffness of carbon-black filled rubber bushings. Polym. Test. 2007, 26, 629–638. [Google Scholar] [CrossRef]
- Hanyga, A. Fractional-order relaxation laws in non-linear viscoelasticity. Contin. Mech. Thermodyn. 2007, 19, 25–36. [Google Scholar] [CrossRef]
- García Tárrago, M.J.; Vinolas, J.; Kari, L. Axial stiffness of carbon black filled rubber bushings. Kaut. Gummi Kunsts. 2007, 60, 43–48. [Google Scholar]
- García Tárrago, M.J.; Kari, L.; Viñolas, J.; Gil-Negrete, N. Torsion stiffness of a rubber bushing: A simple engineering design formula including the amplitude dependence. J. Strain Anal. Eng. 2007, 42, 13–21. [Google Scholar] [CrossRef]
- Gil-Negrete, N.; Vinolas, J.; Kari, L. A nonlinear rubber material model combining fractional order viscoelasticity and amplitude dependent effects. J. Appl. Mech. 2009, 76, 011009. [Google Scholar] [CrossRef]
- Lewandowski, R.; Pawlak, Z. Dynamic analysis of frames with viscoelastic dampers modelled by rheological models with fractional derivatives. J. Sound Vib. 2011, 330, 923–936. [Google Scholar] [CrossRef]
- Blom, P.; Kari, L. A nonlinear constitutive audio frequency magneto-sensitive rubber model including amplitude, frequency and magnetic field dependence. J. Sound Vib. 2011, 330, 947–954. [Google Scholar] [CrossRef]
- Östberg, M.; Kari, L. Transverse, tilting and cross-coupling stiffness of cylindrical rubber isolators in the audible frequency range—The wave-guide solution. J. Sound Vib. 2011, 330, 3222–3244. [Google Scholar] [CrossRef]
- Müller, S.; Kästner, M.; Brummund, J.; Ulbricht, V. A nonlinear fractional viscoelastic material model for polymers. Comput. Mater. Sci. 2011, 50, 2938–2949. [Google Scholar] [CrossRef]
- Machado, J.T.; Kiryakova, V.; Mainardi, F. Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1140–1153. [Google Scholar] [CrossRef] [Green Version]
- Blom, P.; Kari, L. The frequency, amplitude and magnetic field dependent torsional stiffness of a magneto-sensitive rubber bushing. Int. J. Mech. Sci. 2012, 60, 54–58. [Google Scholar] [CrossRef]
- Wharmby, A.W.; Bagley, R.L. Generalization of a theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 2013, 57, 1429–1440. [Google Scholar] [CrossRef]
- Alberdi-Muniain, A.; Gil-Negrete, N.; Kari, L. Modelling energy flow through magneto-sensitive vibration isolators. Int. J. Eng. Sci. 2013, 65, 22–39. [Google Scholar] [CrossRef]
- Müller, S.; Kästner, M.; Brummund, J.; Ulbricht, V. On the numerical handling of fractional viscoelastic material models in a FE analysis. Comput. Mech. 2013, 51, 999–1012. [Google Scholar] [CrossRef]
- Östberg, M.; Coja, M.; Kari, L. Dynamic stiffness of hollowed cylindrical rubber vibration isolators—The wave-guide solution. Int. J. Solids Struct. 2013, 50, 1791–1811. [Google Scholar] [CrossRef]
- Wollscheid, D.; Lion, A. The benefit of fractional derivatives in modelling the dynamics of filler-reinforced rubber under large strains: A comparison with the Maxwell-element approach. Comput. Mech. 2014, 53, 1015–1031. [Google Scholar] [CrossRef]
- Rouleau, L.; Pirk, R.; Pluymers, B.; Desmet, W. Characterization and modeling of the viscoelastic behavior of a self-adhesive rubber using dynamic mechanical analysis tests. J. Aerosp. Technol. Manag. 2015, 7, 200–208. [Google Scholar] [CrossRef] [Green Version]
- Pirk, R.; Rouleau, L.; Desmet, W.; Pluymers, B. Validating the modeling of sandwich structures with constrained layer damping using fractional derivative models. J. Braz. Soc. Mech. Sci. Eng. 2016, 38, 1959–1972. [Google Scholar] [CrossRef]
- Fredette, L.; Singh, R. Estimation of the transient response of a tuned, fractionally damped elastomeric isolator. J. Sound Vib. 2016, 382, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Guo, X.; Yan, G.; Benyahia, L.; Sahraoui, S. Fitting stress relaxation experiments with fractional Zener model to predict high frequency moduli of polymeric acoustic foams. Mech. Time Depend. Mater. 2016, 20, 523–533. [Google Scholar] [CrossRef]
- Rouleau, L.; Deü, J.F.; Legay, A. A comparison of model reduction techniques based on modal projection for structures with frequency-dependent damping. Mech. Syst. Sig. Process. 2017, 90, 110–125. [Google Scholar] [CrossRef]
- Fredette, L.; Singh, R. High frequency, multi-axis dynamic stiffness analysis of a fractionally damped elastomeric isolator using continuous system theory. J. Sound Vib. 2017, 389, 468–483. [Google Scholar] [CrossRef]
- Kari, L. Dynamic stiffness of chemically and physically ageing rubber vibration isolators in the audible frequency range. Part 1: Constitutive equations. Contin. Mech. Thermodyn. 2017, 29, 1027–1046. [Google Scholar] [CrossRef] [Green Version]
- Kari, L. Dynamic stiffness of chemically and physically ageing rubber vibration isolators in the audible frequency range. Part 2: Waveguide solution. Contin. Mech. Thermodyn. 2017, 29, 1047–1059. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Singh, R. A comparison between fractional-order and integer-order differential finite deformation viscoelastic models: Effects of filler content and loading rate on material parameters. Int. J. Appl. Mech. 2018, 10, 1850099. [Google Scholar] [CrossRef]
- Rouleau, L.; Legay, A.; Deü, J.F. Interface finite elements for the modelling of constrained viscoelastic layers. Compos. Struct. 2018, 204, 847–854. [Google Scholar] [CrossRef]
- Wang, B.; Kari, L. A nonlinear constitutive model by spring, fractional derivative and modified bounding surface model to represent the amplitude, frequency and the magnetic dependency for magneto-sensitive rubber. J. Sound Vib. 2019, 438, 344–352. [Google Scholar] [CrossRef]
- Sahraoui, S.; Zekri, N. On fractional modeling of viscoelastic foams. Mech. Res. Commun. 2019, 96, 62–66. [Google Scholar] [CrossRef]
- Wang, B.; Kari, L. Modeling and vibration control of a smart vibration isolation system based on magneto-sensitive rubber. Smart Mater. Struct. 2019, 28, 065026. [Google Scholar] [CrossRef]
- Freundlich, J. Transient vibrations of a fractional Kelvin–Voigt viscoelastic cantilever beam with a tip mass and subjected to a base excitation. J. Sound Vib. 2019, 438, 99–115. [Google Scholar] [CrossRef]
- Wang, B.; Kari, L. One dimensional constitutive model of isotropic magneto-sensitive rubber under shear deformation with amplitude, frequency and magnetic dependency. IOP Conf. Ser. Mater. Sci. Eng. 2020, 855, 012002. [Google Scholar] [CrossRef]
- Wang, B.; Kari, L. A visco-elastic-plastic constitutive model of isotropic magneto-sensitive rubber with amplitude, frequency and magnetic dependency. Int. J. Plast. 2020, 132, 102756. [Google Scholar] [CrossRef]
- Henriques, I.R.; Rouleau, L.; Castello, D.A.; Borges, L.A.; Deü, J.F. Viscoelastic behavior of polymeric foams: Experiments and modeling. Mech. Mater. 2020, 148, 103506. [Google Scholar] [CrossRef]
- Lion, A.; Johlitz, M. A mechanical model to describe the vibroacoustic behaviour of elastomeric engine mounts for electric vehicles. Mech. Syst. Signal Process. 2020, 144, 106874. [Google Scholar] [CrossRef]
- Kari, L. Effective visco-elastic models of tough, doubly cross-linked, single-network polyvinyl alcohol (PVA) hydrogels. Additively separable fractional-derivative based models for chemical and physical cross-links. Contin. Mech. Thermodyn. 2020. [Google Scholar] [CrossRef] [Green Version]
- Kari, L. Are single polymer network hydrogels with chemical and physical cross-links a promising dynamic vibration absorber material? A simulation model inquiry. Materials 2020, 13, 5127. [Google Scholar] [CrossRef] [PubMed]
- Gong, S.; Oberst, S.; Wang, X. An experimentally validated rubber shear spring model for vibrating flip-flow screens. Mech. Syst. Signal. Process. 2020, 139, 106619. [Google Scholar] [CrossRef]
- Yang, F.; Wang, P.; Wei, K.; Wang, F. Investigation on nonlinear and fractional derivative Zener model of coupled vehicle-track system. Veh. Syst. Dyn. 2020, 58, 864–889. [Google Scholar] [CrossRef]
- Wang, B.; Kari, L. Constitutive model of isotropic magneto-sensitive rubber with amplitude, frequency, magnetic and temperature dependence under a continuum mechanics basis. Polymers 2021, 13, 472. [Google Scholar] [CrossRef]
- Wang, B.; Hu, T.; Shen, L.; Li, J.; Xu, Z.; Kari, L.; Gong, X. Magneto-sensitive rubber in a vehicle application context-exploring the potential. Front. Mater. 2021, 8, 659780. [Google Scholar]
- Kari, L. Numerically exploring the potential of abating the energy flow peaks through tough, single network hydrogel vibration isolators with chemical and physical cross-links. Materials 2021, 14, 886. [Google Scholar] [CrossRef]
- Lejon, J.; Wang, B.; Kari, L. A constitutive model of the dynamic shear modulus dependence on temperature, prestrain, dynamic strain amplitude and magnetic field for magneto-sensitive elastomer. Int. J. Solids Struct. 2021, 219–220, 106–119. [Google Scholar] [CrossRef]
- Wei, K.; Zhao, Z.; Ren, J.; Ou, L.; Wang, P. High-speed vehicle-slab track coupled vibration analysis of the viscoelastic-plastic dynamic properties of rail pads under different preloads and temperatures. Veh. Syst. Dyn. 2021, 59, 171–202. [Google Scholar] [CrossRef]
- Yue, K.; Zhang, Y.; Xu, P. Comparison of rubber bushing models for loads analysis. SAE Tech. Pap. 2021. [Google Scholar] [CrossRef]
- Cunha-Filho, A.G.; Briend, Y.; de Lima, A.M.G.; Donadon, M.V. A new and efficient constitutive model based on fractional time derivatives for transient analyses of viscoelastic systems. Mech. Syst. Sig. Process. 2021, 146, 107042. [Google Scholar] [CrossRef]
- Gaylord, R.J.; Weiss, G.H.; Dimarzio, E.A. Nonequilibrium mechanical response of a cross-linked network. Macromolecules 1986, 19, 927–929. [Google Scholar] [CrossRef]
- Saad, P.; Thouverez, F.; Laine, J.P.; Jezequel, L. Modélisation du comportement viscoélastique des élastomères autour dune précharge. Méc. Indust. 2003, 4, 133–142. [Google Scholar] [CrossRef]
- Kari, L. The non-linear temperature dependent stiffness of precompressed rubber cylinders. Kaut. Gummi Kunstst. 2002, 55, 76–81. [Google Scholar]
- Christensen, R.M. Theory of Viscoelasticity: An Introduction, 2nd ed.; Academic Press, Inc.: New York, NY, USA, 1982. [Google Scholar] [CrossRef]
- Fung, Y.C. Foundations of Solid Mechanics; Prentice-Hall: Englewood Cliffs, NJ, USA, 1965. [Google Scholar]
- Pochhammer, L. Ueber die Fortpflanzungsgeschwindigkeiten kleiner Schwingungen in einem unbegrenzten isotropen Kreiscylinder. J. Reine Angew. Math. 1876, 81, 324–336. [Google Scholar] [CrossRef]
- Chree, C. The equations of an isotropic elastic solid in polar and cylindrical coordinates, their solutions and applications. Trans. Camb. Philos. Soc. 1889, 14, 250–269. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; Dover Pubications: New York, NY, USA, 1972. [Google Scholar]
- Lavebratt, H.; Stenberg, B. Anisotropy in injection-molded ethylene-propylene-diene rubbers. Part I. Polym. Eng. Sci. 1994, 34, 905–912. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ingredient | Kind | Concentration [phr] |
|---|---|---|
| Natural rubber | GP SMR | 100 |
| Stabilizers | Wax | 1 |
| Antioxidant | 1 | |
| Antiozonant | 1 | |
| Activators | Zinc oxide | 5 |
| Stearic acid | 1 | |
| Vulcanizing agent | Sulphur | 3 |
| Accelerator | CBS | 2 |
| Processing oils | Aromatic | 5 |
| Paraffinic | 1 |
| Quantity | Variable | Value |
|---|---|---|
| Density | 984 kg/m | |
| Nearly incompressible parameter | 2222 | |
| Equilibrium shear modulus | 825 kN/m | |
| Relaxation density | Δ | 276 |
| Generalized relaxation time | 2.94 ns | |
| Fractional derivative order | 0.657 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coja, M.; Kari, L. Using Waveguides to Model the Dynamic Stiffness of Pre-Compressed Natural Rubber Vibration Isolators. Polymers 2021, 13, 1703. https://doi.org/10.3390/polym13111703
Coja M, Kari L. Using Waveguides to Model the Dynamic Stiffness of Pre-Compressed Natural Rubber Vibration Isolators. Polymers. 2021; 13(11):1703. https://doi.org/10.3390/polym13111703
Chicago/Turabian StyleCoja, Michael, and Leif Kari. 2021. "Using Waveguides to Model the Dynamic Stiffness of Pre-Compressed Natural Rubber Vibration Isolators" Polymers 13, no. 11: 1703. https://doi.org/10.3390/polym13111703
APA StyleCoja, M., & Kari, L. (2021). Using Waveguides to Model the Dynamic Stiffness of Pre-Compressed Natural Rubber Vibration Isolators. Polymers, 13(11), 1703. https://doi.org/10.3390/polym13111703