
Antagonist Concepts of Polypyrrole Actuators: Bending Hybrid Actuator and Mirrored Trilayer Linear Actuator



Abstract
:1. Introduction
2. Material and Methods
2.1. Materials
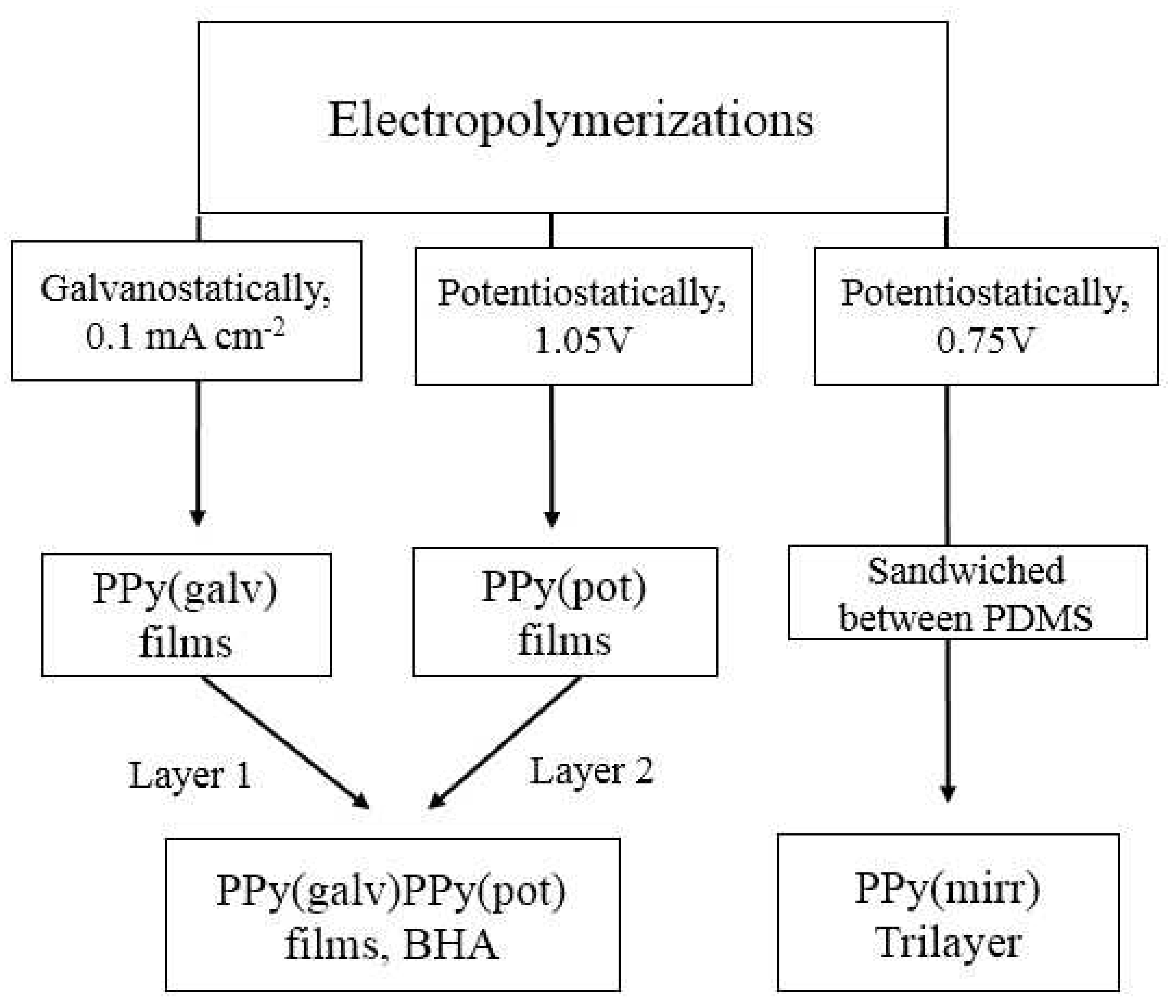
2.2. Electropolymerization
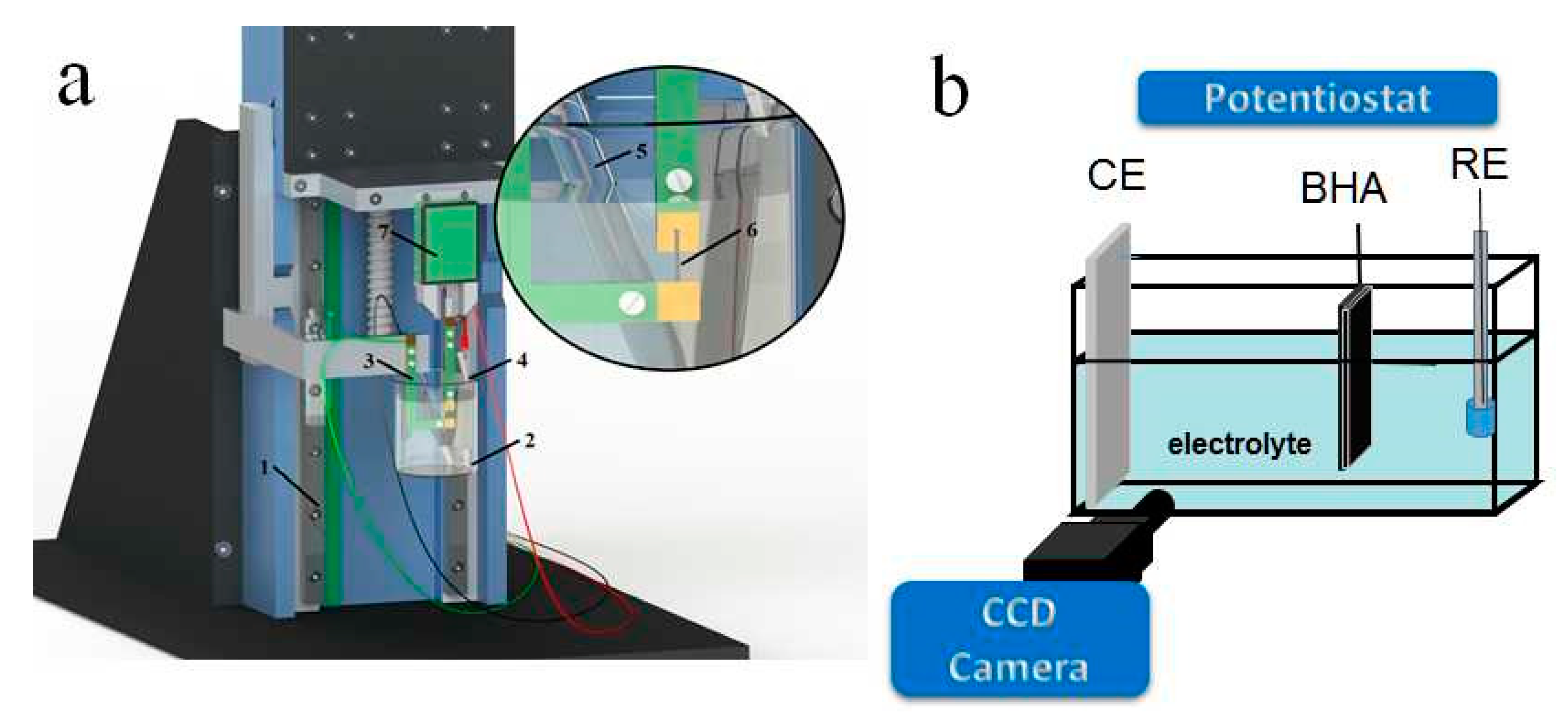
2.3. Actuation Measurements
2.4. Characterization
3. Results and Discussion
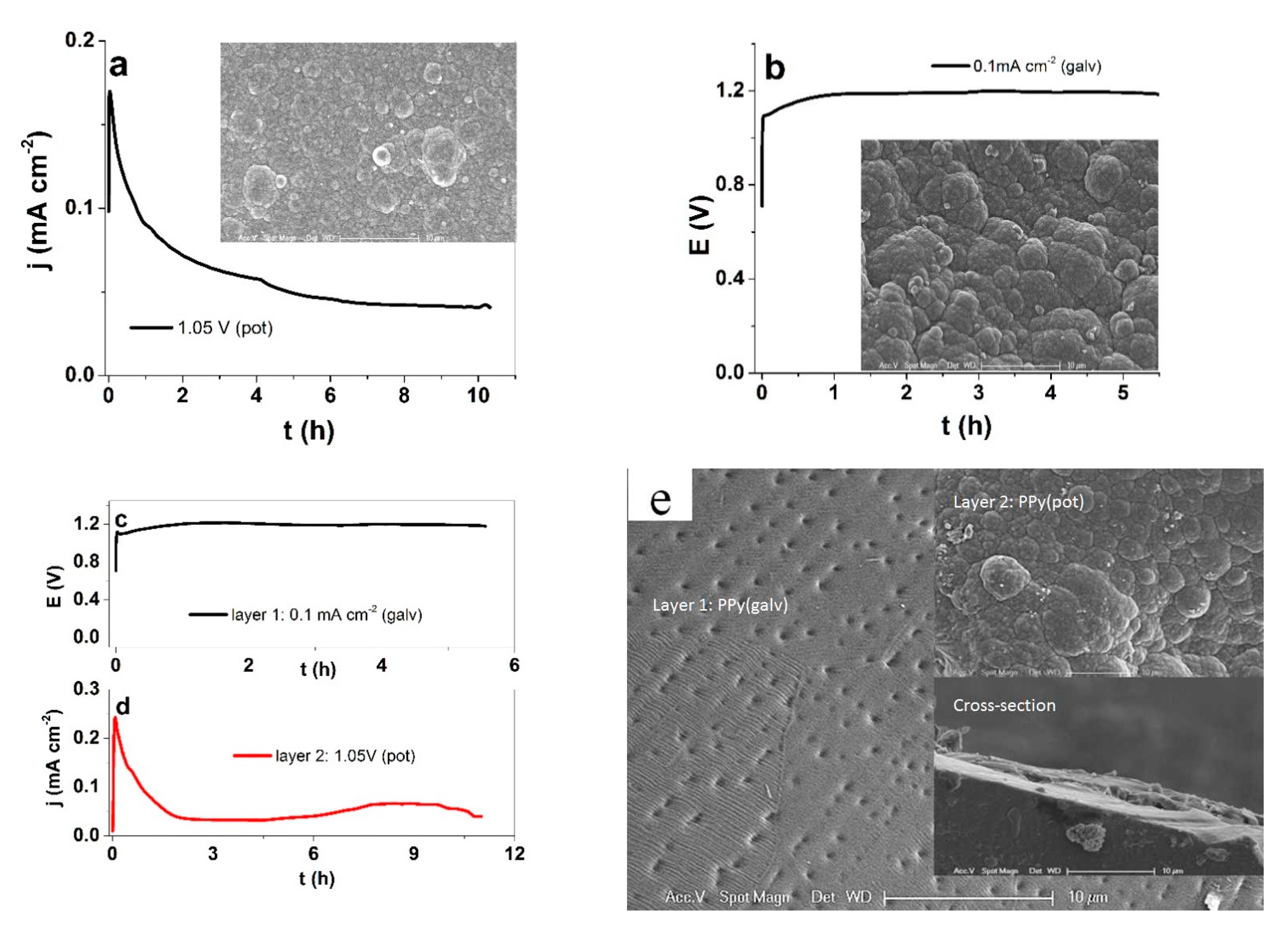
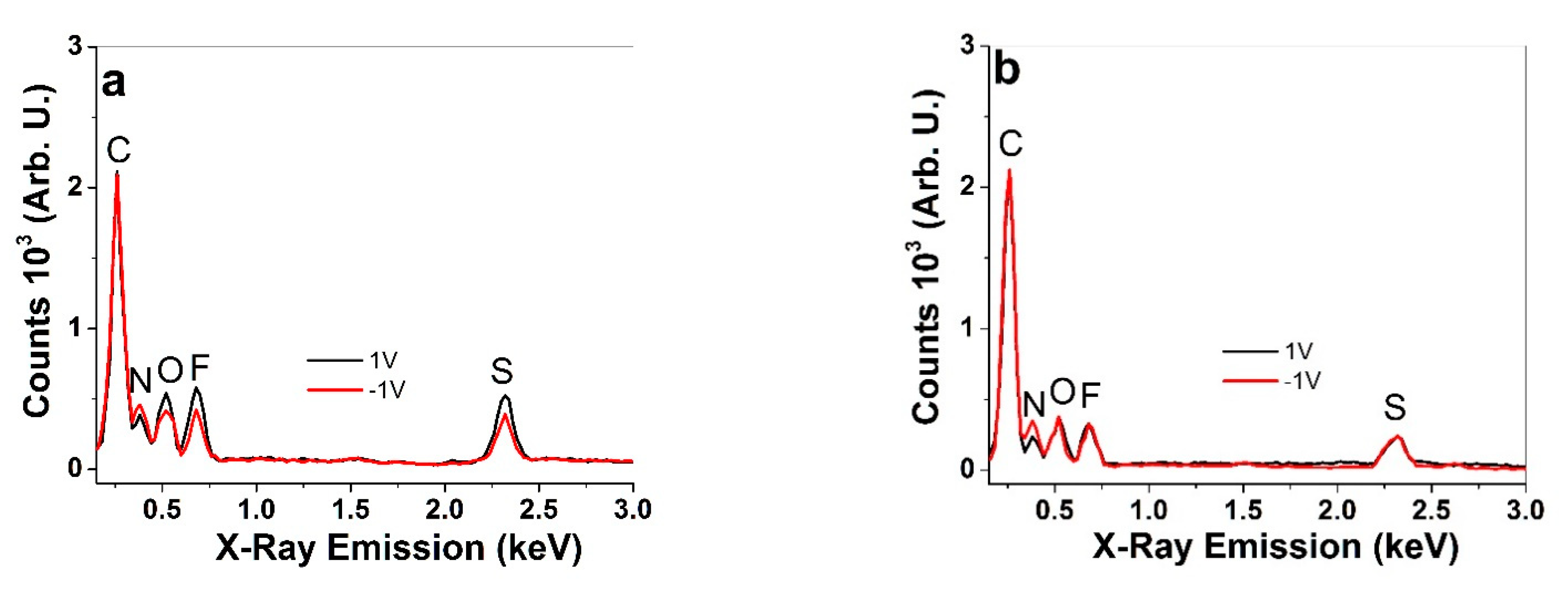
3.1. Characterization
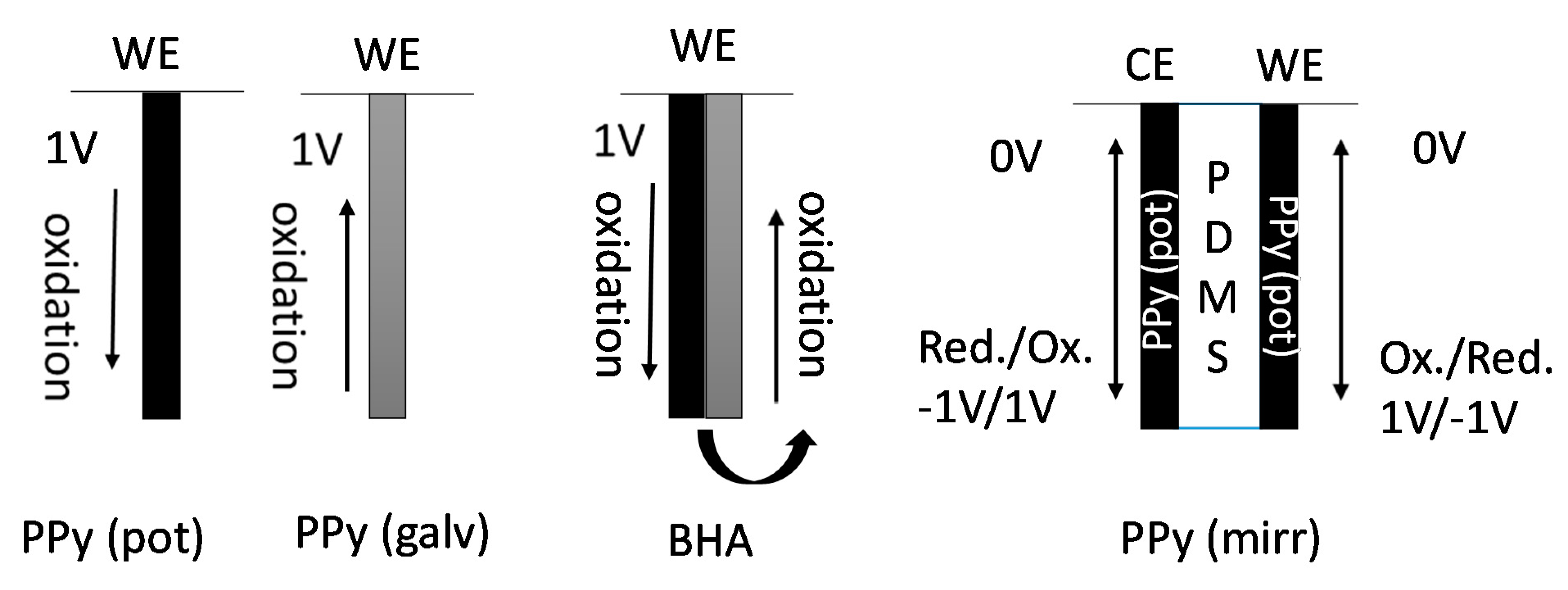
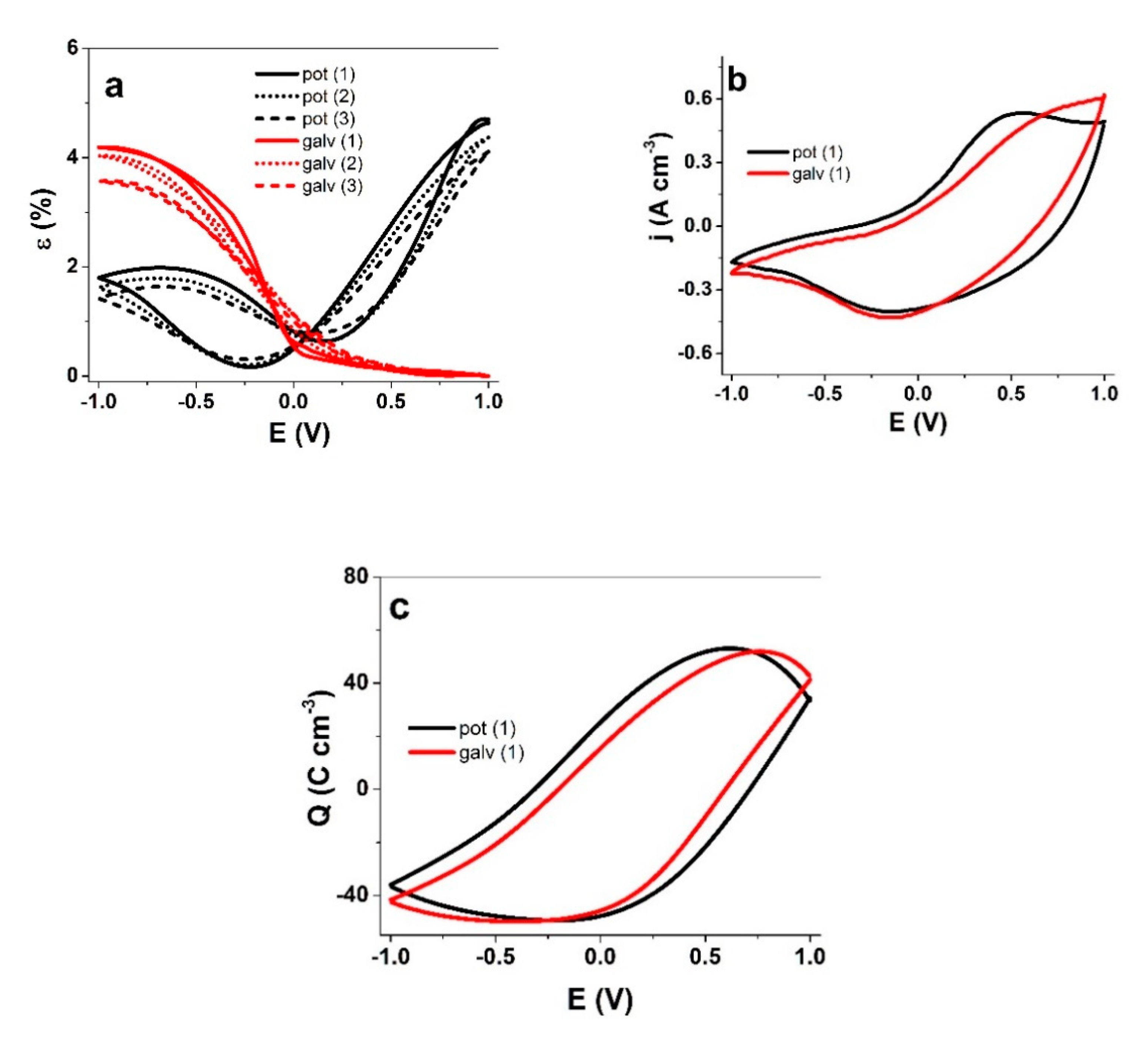
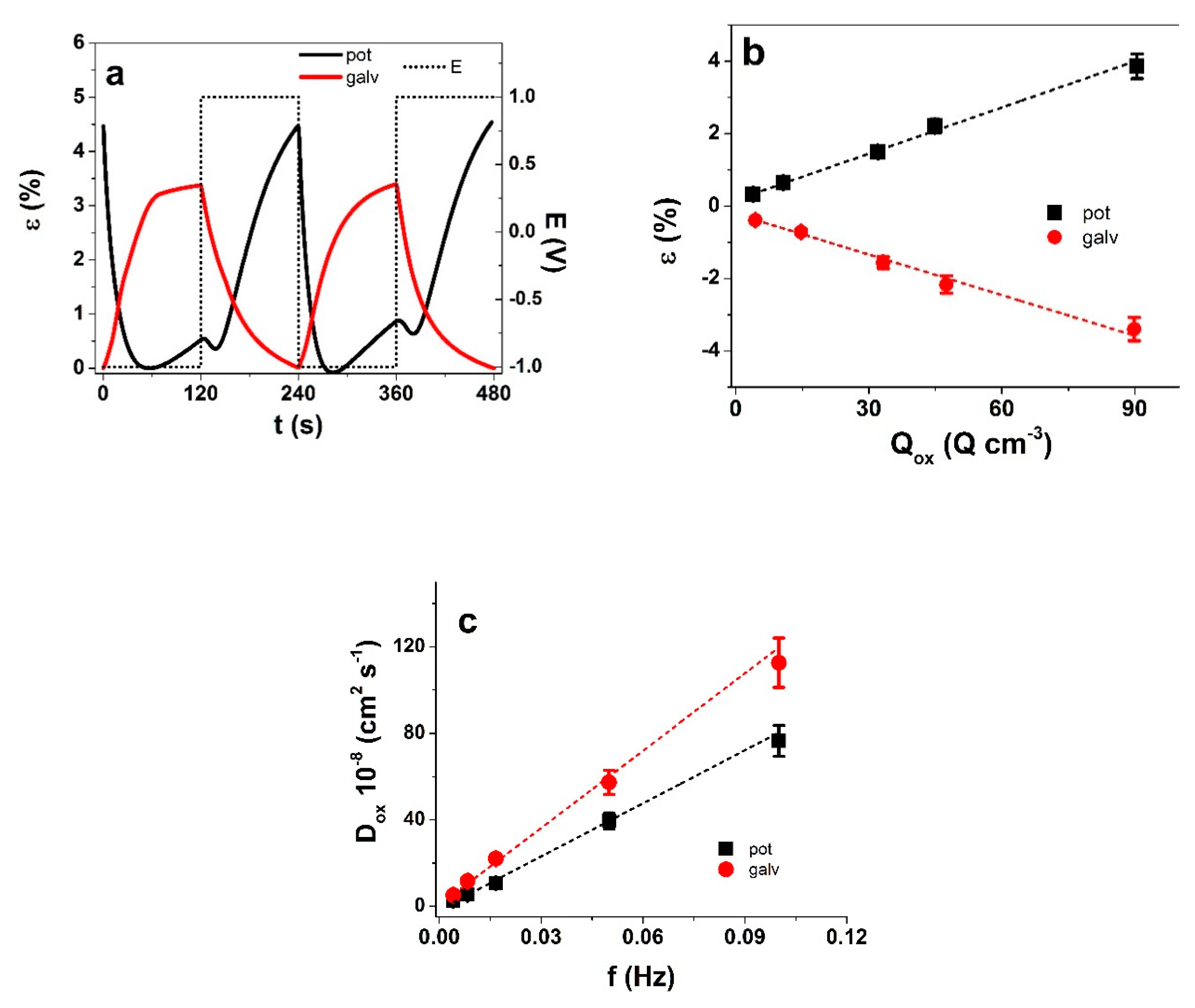
3.2. Comparison of PPy(galv) and PPy(pot) Actuation
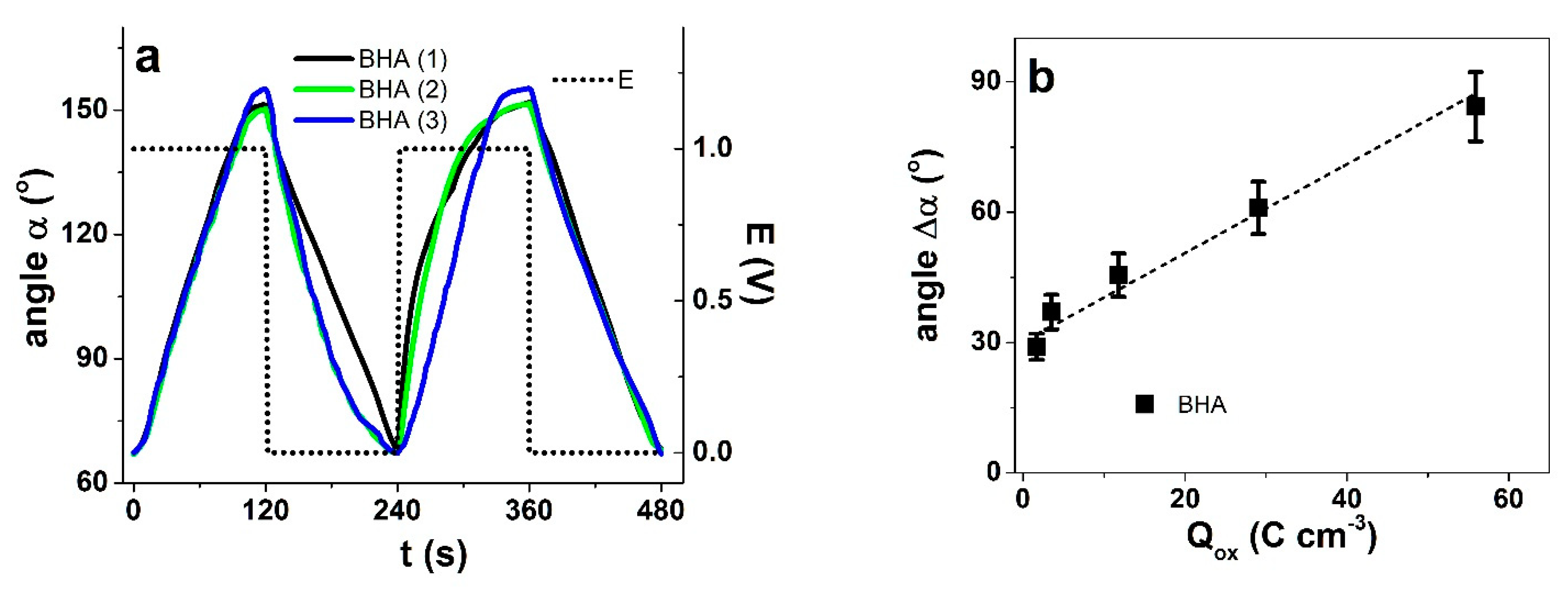
3.3. Actuation of BHA
3.4. Mirrored Trilayer
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2018, 30, 1704407. [Google Scholar] [CrossRef] [PubMed]
- Jager, E.W.H.; Smela, E.; Ingana, O. Microfabricating Conjugated Polymer Actuators. Science 2000, 290, 1540–1545. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jager, E.W.H.; Smela, E.; Inganäs, O.; Lundström, I. Polypyrrole microactuators. Synth. Met. 1999, 102, 1309–1310. [Google Scholar] [CrossRef] [Green Version]
- Hara, S.; Zama, T.; Takashima, W.; Kaneto, K. Free-standing gel-like polypyrrole actuators doped with bis(perfluoroalkylsulfonyl)imide exhibiting extremely large strain. Smart Mater. Struct. 2005, 14, 1501–1510. [Google Scholar] [CrossRef]
- Hara, S.; Zama, T.; Takashima, W.; Kaneto, K. Artificial muscles based on polypyrrole actuators with large strain and stress induced electrically. Polym. J. 2004, 36, 151–161. [Google Scholar] [CrossRef] [Green Version]
- Melling, D.; Martinez, J.G.; Jager, E.W.H. Conjugated Polymer Actuators and Devices: Progress and Opportunities. Adv. Mater. 2019, 31, 1808210. [Google Scholar] [CrossRef]
- Maziz, A.; Concas, A.; Khaldi, A.; Stålhand, J.; Persson, N.-K.; Jager, E.W.H. Knitting and weaving artificial muscles. Sci. Adv. 2017, 3, e1600327. [Google Scholar] [CrossRef] [Green Version]
- Conzuelo, L.V.; Arias-Pardilla, J.; Cauich-Rodríguez, J.V.; Smit, M.A.; Otero, T.F. Sensing and tactile artificial muscles from reactive materials. Sensors 2010, 10, 2638–2674. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tyagi, M.; Spinks, G.M.; Jager, E.W.H. 3D Printing Microactuators for Soft Microrobots. Soft Robot. 2021, 8, 19–27. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smela, E. Conjugated polymer actuators for biomedical applications. Adv. Mater. 2003, 15, 481–494. [Google Scholar] [CrossRef]
- Lundin, V.; Herland, A.; Berggren, M.; Jager, E.W.H.; Teixeira, A.I. Control of neural stem cell survival by electroactive polymer substrates. PLoS ONE 2011, 6, e18624. [Google Scholar] [CrossRef]
- Heinze, J. Electrochemistry of conducting polymers. Synth. Met. 1991, 41–43, 2805–2823. [Google Scholar] [CrossRef]
- Khanh, T.T.; Kesküla, A.; Zondaka, Z.; Harjo, M.; Kivilo, A.; Khorram, M.S.; Tamm, T.; Kiefer, R. Role of polymerization temperature on the performance of polypyrrole/dodecylbenzenesulphonate linear actuators. Synth. Met. 2019, 247, 53–58. [Google Scholar] [CrossRef]
- Martinez, J.G.; Otero, T.F.; Jager, E.W.H. Effect of the electrolyte concentration and substrate on conducting polymer actuators. Langmuir 2014, 30, 3894–3904. [Google Scholar] [CrossRef] [PubMed]
- Kiefer, R.; Martinez, J.G.; Kesküla, A.; Anbarjafari, G.; Aabloo, A.; Otero, T.F. Polymeric actuators: Solvents tune reaction-driven cation to reaction-driven anion actuation. Sens. Actuators B Chem. 2016, 233, 461–469. [Google Scholar] [CrossRef]
- Bay, L.; Jacobsen, T.; Skaarup, S.; West, K. Mechanism of actuation in conducting polymers: Osmotic expansion. J. Phys. Chem. B 2001, 105, 8492–8497. [Google Scholar] [CrossRef]
- Kiefer, R.; Weis, D.G.; Aabloo, A.; Urban, G.; Heinze, J. Dependence of polypyrrole bilayer deflection upon polymerization potential. Synth. Met. 2013, 172, 37–43. [Google Scholar] [CrossRef]
- Kiefer, R.; Kilmartin, P.A.; Bowmaker, G.A.; Cooney, R.P.; Travas-Sejdic, J. Mixed-ion linear actuation of PPy and PEDOT in propylene carbonate-triflate electrolytes. Electroact. Polym. Actuators Devices 2007, 6524, 65240U. [Google Scholar] [CrossRef]
- Tangorra, J.; Anquetil, P.; Fofonoff, T.; Chen, A.; Del Zio, M.; Hunter, I. The application of conducting polymers to a biorobotic fin propulsor. Bioinspiration Biomim. 2007, 2, S6. [Google Scholar] [CrossRef]
- Maziz, A.; Plesse, C.C.; Soyer, C.; Cattan, E.; Vidal, F.F.; Chevrot, C.; Plesse, C.C.; Vidal, F.F.; Teyssie, D.; Khaldi, A.; et al. Inkjet printing as a deposition and patterning tool for polymers and inorganic particles. Sens. Actuators B Chem. 2016, 164101, 2910–2912. [Google Scholar] [CrossRef]
- Fuchiwaki, M.; Martinez, J.G.; Otero, T.F. Asymmetric Bilayer Muscles. Cooperative and Antagonist Actuation. Electrochim. Acta 2016, 195, 9–18. [Google Scholar] [CrossRef] [Green Version]
- Trava-Sejdic, J.; Tamm, T.; Kilmartin, P.A.; Temmer, R.; Aabloo, A.; Kiefer, R. PEDOT/TBACF3SO 3 bending actuators based on a PEDOT-PEDOT sandwich complex. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 11–15 March 2013; Volume 8687, p. 86872Z. [Google Scholar]
- Plesse, C.; Vidal, F.; Teyssié, D.; Chevrot, C. Conducting polymer artificial muscle fibres: Toward an open air linear actuation. Chem. Commun. 2010, 46, 2910–2912. [Google Scholar] [CrossRef] [PubMed]
- Fannir, A.; Temmer, R.; Nguyen, G.T.M.; Cadiergues, L.; Laurent, E.; Madden, J.D.W.; Vidal, F.; Plesse, C. Linear Artificial Muscle Based on Ionic Electroactive Polymer: A Rational Design for Open-Air and Vacuum Actuation. Adv. Mater. Technol. 2019, 4, 1800519. [Google Scholar] [CrossRef]
- Harjo, M.; Tamm, T.; Anbarjafari, G.; Kiefer, R. Hardware and Software Development for Isotonic Strain and Isometric Stress Measurements of Linear Ionic Actuators. Polymers 2019, 11, 1054. [Google Scholar] [CrossRef] [Green Version]
- Khuyen, N.Q.; Kiefer, R.; Elhi, F.; Anbarjafari, G.; Martinez, J.G.; Tamm, T. A biomimetic approach to increasing soft actuator performance by friction reduction. Polymers 2020, 12, 1120. [Google Scholar] [CrossRef]
- Otero, T.F.; Martinez, J.G. Activation energy for polypyrrole oxidation: Film thickness influence. J. Solid State Electrochem. 2011, 15, 1169–1178. [Google Scholar] [CrossRef]
- Otero, T.F.; Boyano, I. Comparative study of conducting polymers by the ESCR model. J. Phys. Chem. B 2003, 107, 6730–6738. [Google Scholar] [CrossRef]
- Suárez, I.J.; Otero, T.F.; Márquez, M. Diffusion coefficients in swelling polypyrrole: ESCR and cottrell models. J. Phys. Chem. B 2005, 109, 1723–1729. [Google Scholar] [CrossRef]
- Gade, V.K.; Shirale, D.J.; Gaikwad, P.D.; Kakde, P.; Savale, P.A.; Kharat, H.J. Synthesis and Characterization of Ppy-PVS, Ppy-pTS, and Ppy-. Int. J. Polym. Mater. Polym. Biomater. 2007, 56, 37–41. [Google Scholar] [CrossRef]
- Kiefer, R.; Chu, S.Y.; Kilmartin, P.A.; Bowmaker, G.A.; Cooney, R.P.; Travas-Sejdic, J. Mixed-ion linear actuation behaviour of polypyrrole. Electrochim. Acta 2007, 52, 2386–2391. [Google Scholar] [CrossRef]
- Kiefer, R.; Kilmartin, P.A.; Bowmaker, G.A.; Cooney, R.P.; Travas-Sejdic, J. Actuation of polypyrrole films in propylene carbonate electrolytes. Sens. Actuators B Chem. 2007, 125, 628–634. [Google Scholar] [CrossRef]
- Kesküla, A.; Peikolainen, A.L.; Kiefer, R.; Tamm, T. Consistent response from conducting polymer actuators: Potential window and embedded charges to avoid mixed ion transport. Synth. Met. 2020, 268, 116502. [Google Scholar] [CrossRef]
- Valero, L.; Otero, T.F.; Martinez, J.G.; Martínez, J.G. Exchanged Cations and Water during Reactions in Polypyrrole Macroions from Artificial Muscles. ChemPhysChem 2014, 15, 293–301. [Google Scholar] [CrossRef]
- Otero, T.F. Coulovoltammetric and Dynamovoltammetric Responses from Conducting Polymers and Bilayer Muscles as Tools to Identify Reaction-driven Structural Changes. A review. Electrochim. Acta 2016, 212, 440–457. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Free-Standing Films | Strain ε (%) | Qox, (C cm−3) | Dox 10−8 (cm−2 s−1) | Conductivity (S cm−1) | l (mm) × w (mm) × d (μm) |
|---|---|---|---|---|---|
| PPy(galv) | −1.56 ± 0.16 | 33.2 ± 0.3 | 22.0 ± 0.20 | 8.5 ± 0.6 | 10 × 2 × 15.0 ± 1.2 |
| PPy(pot) | 1.49 ± 0.14 | 32.0 ± 0.2 | 10.6 ± 0.11 | 7.8 ± 0.7 | 10 × 2 × 15.2 ± 1.5 |
| Design | Actuation | Charge Density (C cm−3) | Conductivity (S cm−1) | Dimension (l × w × d) |
|---|---|---|---|---|
| BHA PPy(galv)-PPy(pot, 1.05 V) bilayer | 45.5 ± 4 degree bending | 11.8 ± 1.1 | ~7.6 ± 0.7 | 20 mm × 4 mm ×31.5 ± 2.2 μm |
| PPy(mirr) PPy(pot 0.75 V)-PDMS-PPy(pot, 0.75 V) trilayer | 0.74 ± 0.08% linear | 16 ± 1.5 | 13.4 ± 1.1 | 10 mm × 2 mm × 230 ± 2 μm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiefer, R.; Nguyen, N.T.; Le, Q.B.; Anbarjafari, G.; Tamm, T. Antagonist Concepts of Polypyrrole Actuators: Bending Hybrid Actuator and Mirrored Trilayer Linear Actuator. Polymers 2021, 13, 861. https://doi.org/10.3390/polym13060861
Kiefer R, Nguyen NT, Le QB, Anbarjafari G, Tamm T. Antagonist Concepts of Polypyrrole Actuators: Bending Hybrid Actuator and Mirrored Trilayer Linear Actuator. Polymers. 2021; 13(6):861. https://doi.org/10.3390/polym13060861
Chicago/Turabian StyleKiefer, Rudolf, Ngoc Tuan Nguyen, Quoc Bao Le, Gholamreza Anbarjafari, and Tarmo Tamm. 2021. "Antagonist Concepts of Polypyrrole Actuators: Bending Hybrid Actuator and Mirrored Trilayer Linear Actuator" Polymers 13, no. 6: 861. https://doi.org/10.3390/polym13060861
APA StyleKiefer, R., Nguyen, N. T., Le, Q. B., Anbarjafari, G., & Tamm, T. (2021). Antagonist Concepts of Polypyrrole Actuators: Bending Hybrid Actuator and Mirrored Trilayer Linear Actuator. Polymers, 13(6), 861. https://doi.org/10.3390/polym13060861