
Nonlinear Rheological Processes Modeling in Three-Layer Plates with a Polyurethane Foam Core


Abstract
:1. Introduction
2. Materials and Methods
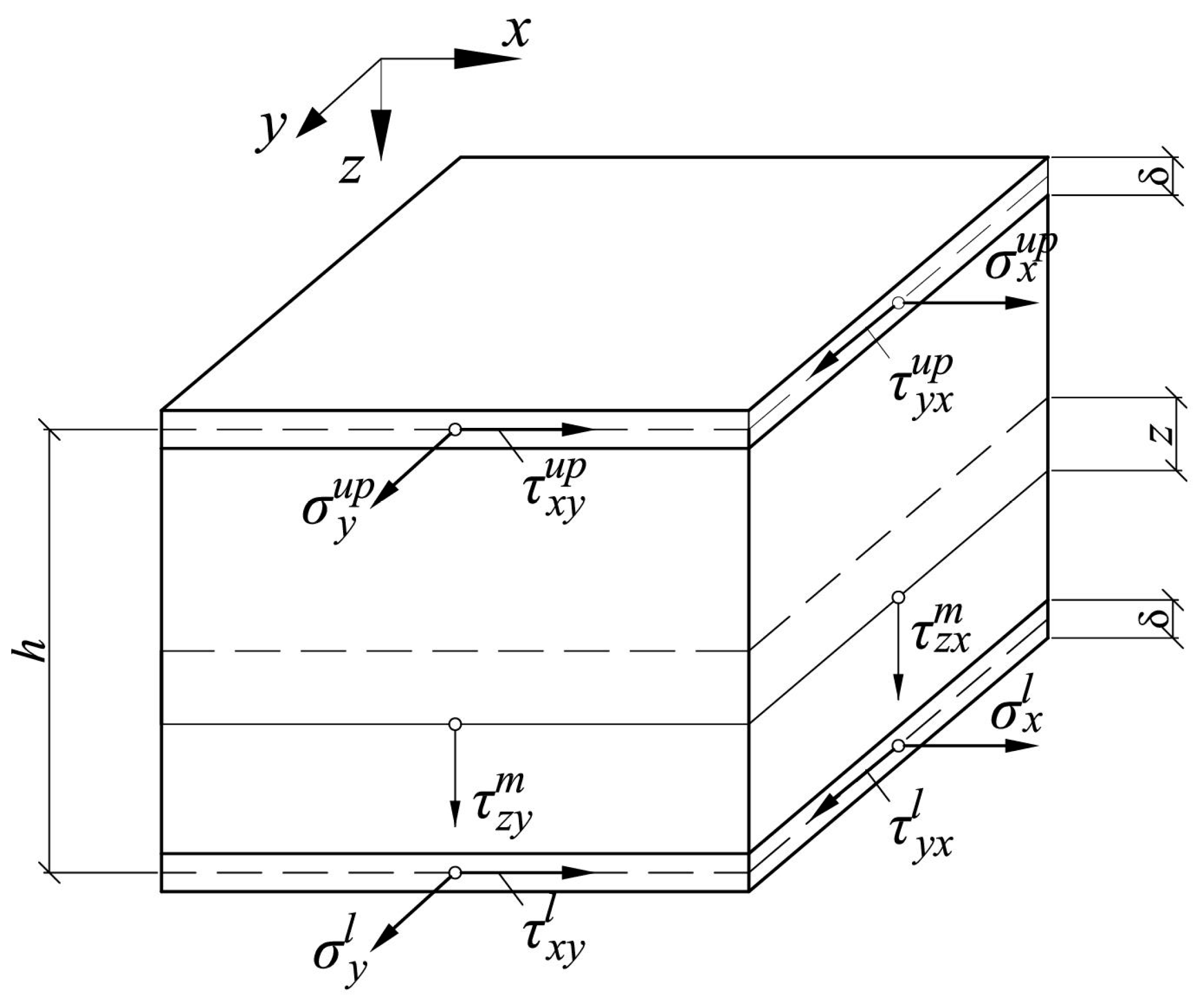
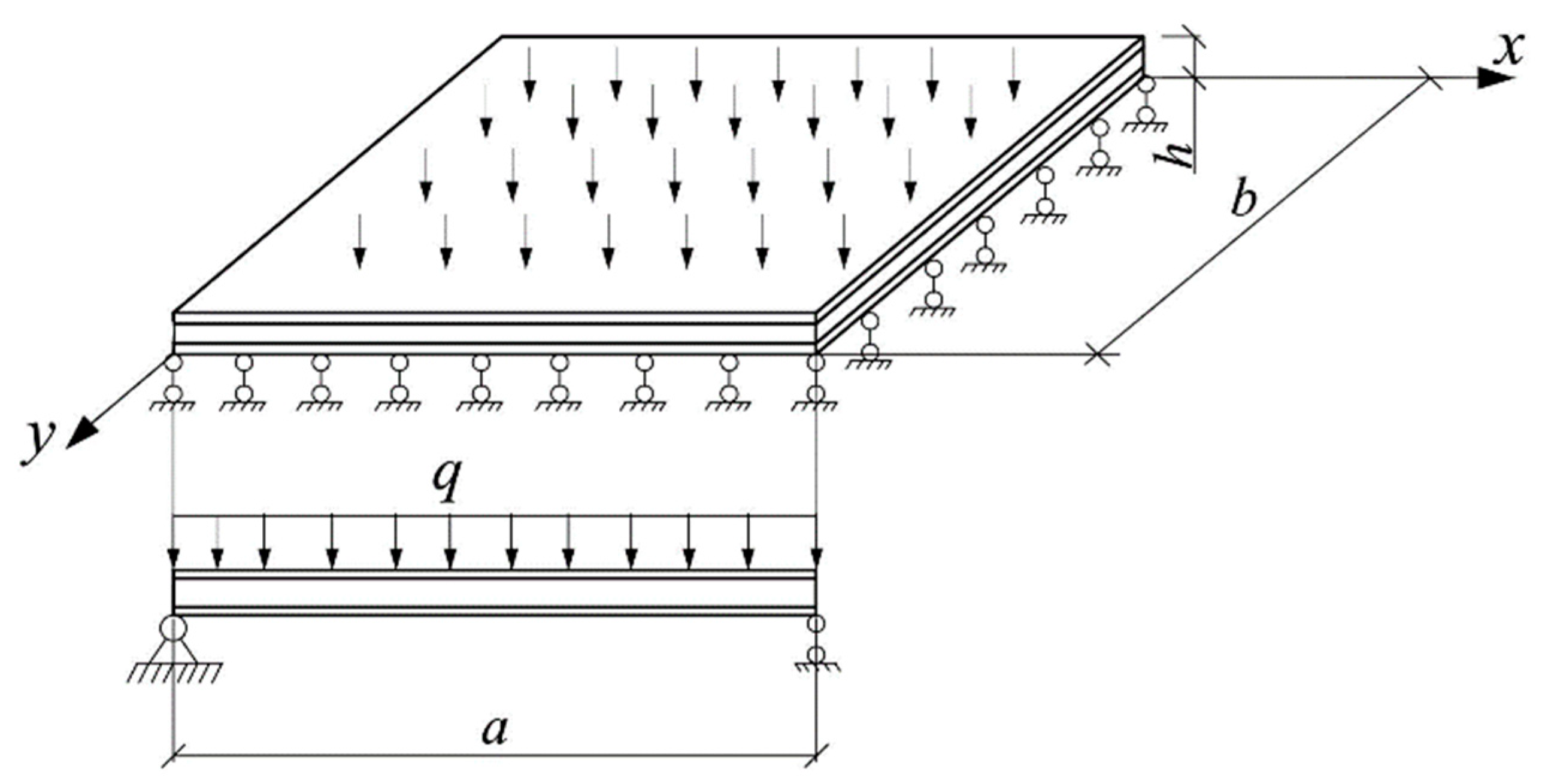
2.1. Derivation of the Resolving Equations
2.2. Calculation Algorithm
2.3. Analytical Solution for the Moment of the Beginning and End of the Creep Process
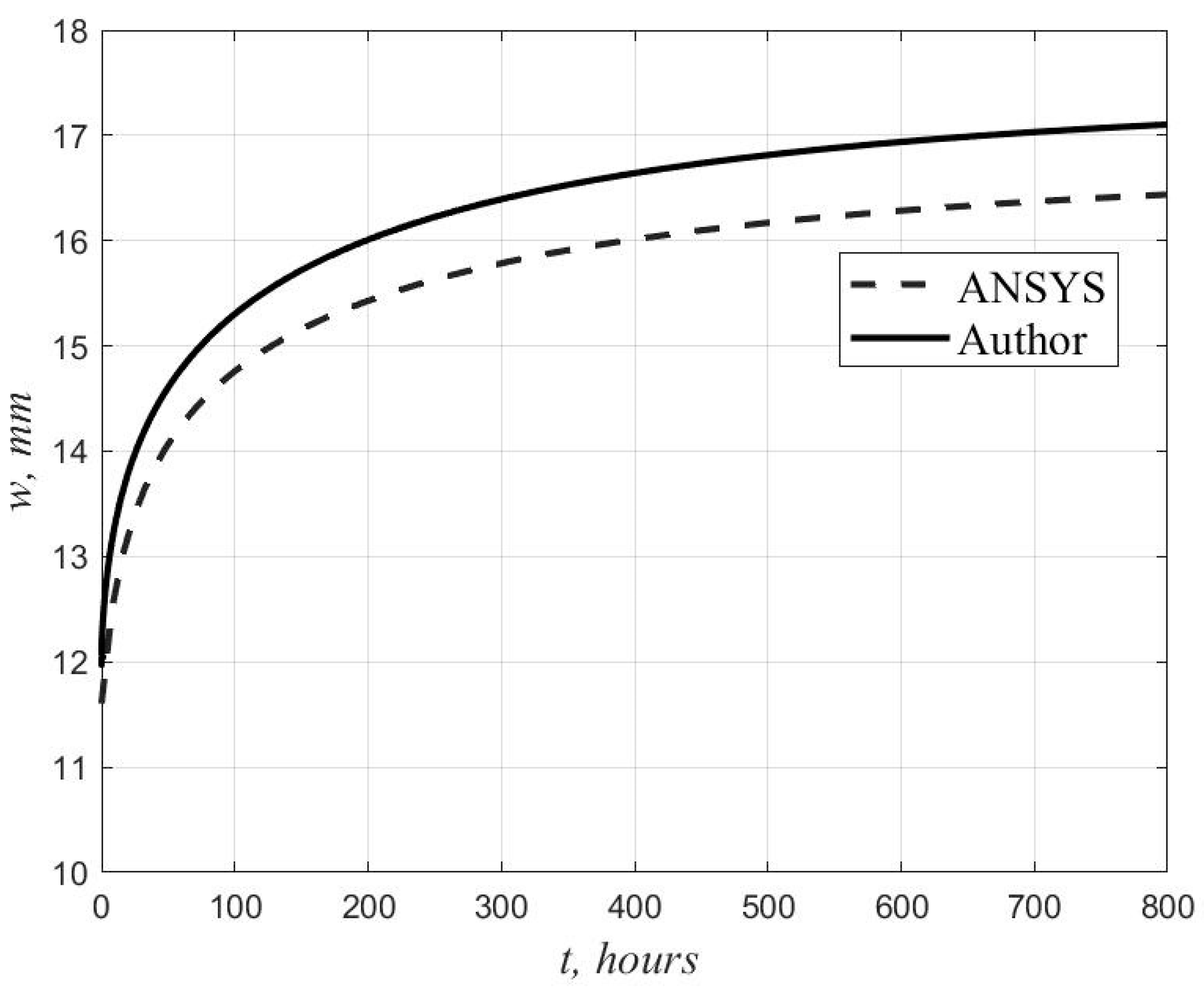
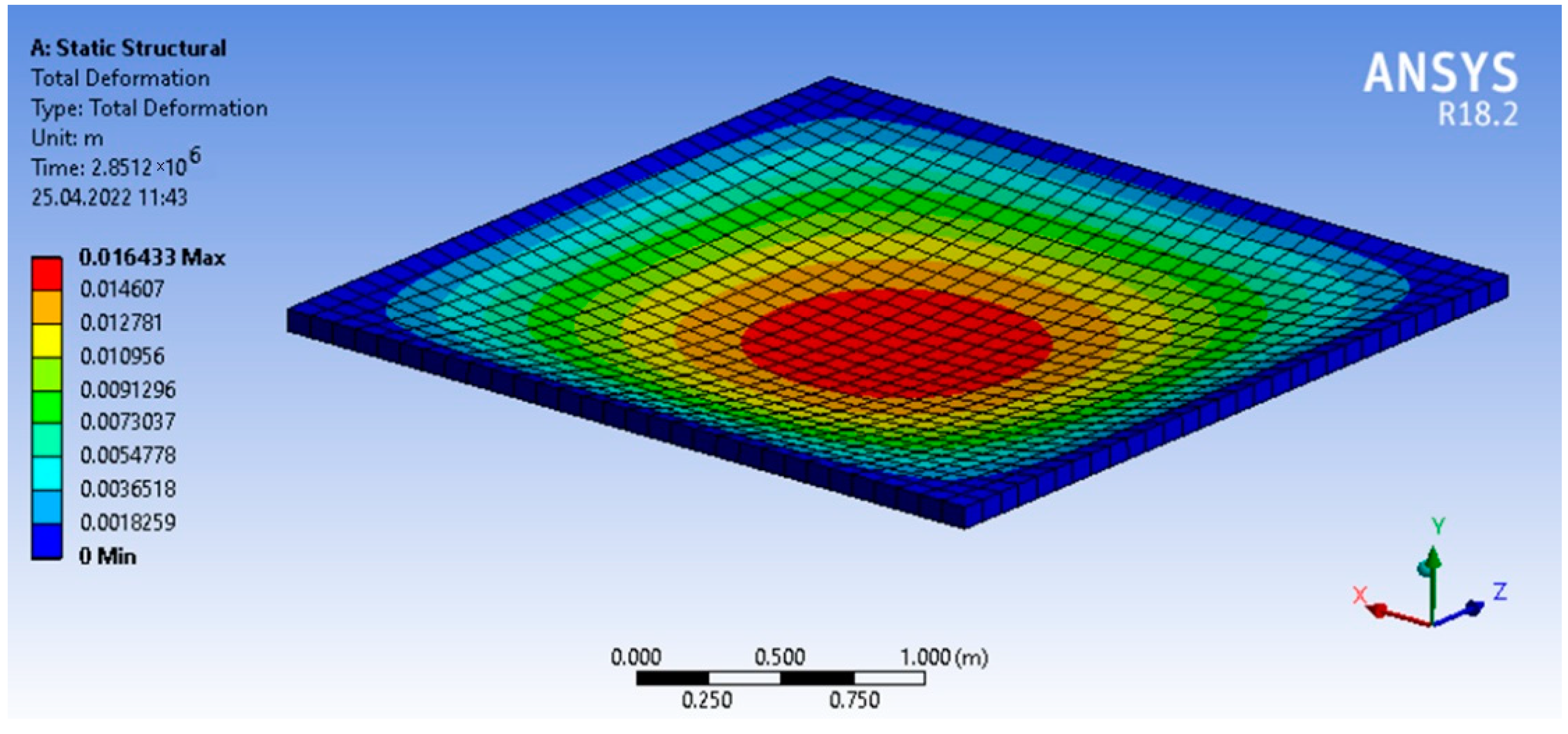
3. Results
4. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Keller, T.; Haas, C.; Vallee, T. Structural Concept, Design, and Experimental Verification of a Glass Fiber-Reinforced Polymer Sandwich Roof Structure. J. Compos. Constr. 2008, 12, 454–468. [Google Scholar] [CrossRef]
- Bobryashov, V.M.; Bushuev, N. On the features of production, design and reliability assessment of enclosing composite structures with effective thermal insulation. IOP Conf. Ser. Mater. Sci. Eng. 2020, 919, 022007. [Google Scholar] [CrossRef]
- Kardomateas, G.A.; Rodcheuy, N.; Frostig, Y. First-Order Shear Deformation Theory Variants for Curved Sandwich Panels. AIAA J. 2018, 56, 808–817. [Google Scholar] [CrossRef]
- Huang, J.S.; Gibson, L.J. Creep of Sandwich Beams with Polymer Foam Cores. J. Mater. Civ. Eng. 1990, 2, 171–182. [Google Scholar] [CrossRef]
- Chen, C.; Fleck, N.A.; Ashby, M.F. Creep response of sandwich beams with a metallic foam core. Adv. Eng. Mater. 2002, 4, 777–780. [Google Scholar] [CrossRef]
- Stephen, N.G. On a check on the accuracy of Timoshenko’s beam theory. J. Sound Vib. 2002, 257, 809–812. [Google Scholar] [CrossRef] [Green Version]
- Garrido, M.A.; Correia, J.R.; Branco, F.A.; Keller, T. Creep behaviour of sandwich panels with rigid polyurethane foam core and glass-fibre reinforced polymer faces: Experimental tests and analytical modelling. J. Compos. Mater. 2014, 48, 2237–2249. [Google Scholar] [CrossRef]
- Garrido, M.A.; Correia, J.R. Elastic and viscoelastic behaviour of sandwich panels with glass-fibre reinforced polymer faces and polyethylene terephthalate foam core. J. Sandw. Struct. Mater. 2016, 20, 399–424. [Google Scholar] [CrossRef]
- Frostig, Y.; Baruch, M.; Vilnay, O.; Sheinman, I. High-Order Theory for Sandwich-Beam Behavior with Transversely Flexible Core. J. Eng. Mech. 1992, 118, 1026–1043. [Google Scholar] [CrossRef]
- Ramezani, M.; Hamed, E. Coupled thermo-mechanical creep behavior of sandwich beams–Modeling and analysis. Eur. J. Mech. A/Solids 2013, 42, 266–279. [Google Scholar] [CrossRef]
- Hamed, E.; Frostig, Y. Geometrically nonlinear creep behavior of debonded sandwich panels with a compliant core. J. Sandw. Struct. Mater. 2016, 18, 65–94. [Google Scholar] [CrossRef]
- Silvestre, N.; Camotim, D. First-order generalised beam theory for arbitrary orthotropic materials. Thin-Walled Struct. 2002, 40, 755–789. [Google Scholar] [CrossRef]
- Silvestre, N.; Camotim, D. Second-order generalised beam theory for arbitrary orthotropic materials. Thin-Walled Struct. 2002, 40, 791–820. [Google Scholar] [CrossRef]
- Ferreira, A.J.M.; Araujo, A.L.; Neves, A.M.A.; Rodrigues, J.D.; Carrera, E.; Cinefra, M. A finite element model using a unified formulation for the analysis of viscoelastic sandwich laminates. Compos. Part B 2013, 45, 1258–1264. [Google Scholar] [CrossRef] [Green Version]
- Carrera, E.; Pagani, A.; Petrolo, M. Refined 1D Finite Elements for the Analysis of Secondary, Primary, and Complete Civil Engineering Structures. J. Struct. Eng. 2015, 141, 04014123. [Google Scholar] [CrossRef]
- Garrido, M.; Correia, J.R.; Keller, T.; Cabral-Fonseca, S. Creep of Sandwich Panels with Longitudinal Reinforcement Ribs for Civil Engineering Applications: Experiments and Composite Creep Modeling. J. Compos. Constr. 2016, 21, 04016074. [Google Scholar] [CrossRef]
- Arruda, M.R.T.; Garrido, M.; Castro, L.M.S.; Ferreira, A.J.M.; Correia, J.R. Numerical modelling of the creep behaviour of GFRP sandwich panels using the Carrera Unified Formulation and Composite Creep Modelling. Compos. Struct. 2018, 183, 103–113. [Google Scholar] [CrossRef]
- Garrido, M.; Correia, J.R.; Keller, T. Effect of service temperature on the shear creep response of rigid polyurethane foam used in composite sandwich floor panels. Constr. Build. Mater. 2016, 118, 235–244. [Google Scholar] [CrossRef]
- Briody, C.; Duignan, B.; Jerrams, S.; Ronan, S. Prediction of compressive creep behaviour in flexible polyurethane foam over long time scales and at elevated temperatures. Polym. Test. 2012, 31, 1019–1025. [Google Scholar] [CrossRef]
- Garrido, M.; Correia, J.; Branco, F.; SÁ, M. Creep behaviour of GFRP sandwich panels with PU foam cores for civil engineering structural applications. In Proceedings of the 6th International Conference on FRP Composites in Civil Engineering, Roma, Italy, 13–15 June 2012; pp. 15–20. [Google Scholar]
- Tsybin, N.Y.; Turusov, R.A.; Andreev, V.I. Comparison of creep in free polymer rod and creep in polymer layer of the layered composite. Procedia Eng. 2016, 153, 51–58. [Google Scholar] [CrossRef] [Green Version]
- Yazyev, B.M.; Chepurnenko, A.S.; Savchenko, A.A. Calculation of Three-Layer Panels with Polyurethane Foam Filler Taking into Account the Rheological Properties of the Middle Layer. Mater. Sci. Forum 2018, 935, 144–149. [Google Scholar] [CrossRef]
- Chepurnenko, A.S.; Litvinov, S.V.; Yazyev, B.M. Combined Use of Contact Layer and Finite-Element Methods to Predict the Long-Term Strength of Adhesive Joints in Normal Separation. Mech. Compos. Mater. 2021, 57, 349–360. [Google Scholar] [CrossRef]
- Yazyev, B.M.; Yazyev, S.B.; Grinev, A.P.; Britikova, E.A. The Definition of a Critical Deflection of Compressed Rods with the Creep by the Method of Bubnov-Galerkin. Mater. Sci. Forum 2018, 931, 127–132. [Google Scholar] [CrossRef]
- Chepurnenko, V.S.; Yazyev, B.M. Stability of three-layer rods with allowance for initial imperfections and shear deformation. Int. J. Comput. Civil Struct. Eng. 2019, 15, 25–33. [Google Scholar]
- Litvinov, S.V.; Yazyev, B.M.; Turko, M.S. Effecting of modified HDPE composition on the stress-strain state of constructions. IOP Conf. Ser. Mater. Sci. Eng. 2018, 463, 042063. [Google Scholar] [CrossRef]
- Litvinov, S.V.; Trush, L.I.; Yazyev, S.B. Flat axisymmetrical problem of thermal creepage for thick-walled cylinder made of recyclable PVC. Procedia Eng. 2016, 150, 1686–1693. [Google Scholar] [CrossRef] [Green Version]
- Yazyev, B.M.; Litvinov, S.V.; Yazyev, S.B. The problem of thermal viscoelasticity for a multilayered inhomogeneous polymeric cylinder. Int. Polym. Sci. Technol. 2008, 35, 59–61. [Google Scholar] [CrossRef]
- Bekkiev, M.Y.; Chepurnenko, A.S.; Yazyev, B.M. Finite element modeling of creep of three-layered shallow shells. IOP Conf. Ser. Mater. Sci. Eng. 2018, 463, 022014. [Google Scholar] [CrossRef]
- Turusov, R.A.; Gorenberg, A.Y.; Yazyev, B.M. Long-term normal tearing strength of adhesive bonds. Polymer Science Series D 2012, 5, 7–14. [Google Scholar] [CrossRef]
- Andreev, V.I.; Turusov, R.A.; Tsybin, N.Y. Application of the Contact Layer in the Solution of the Problem of Bending the Multilayer Beam. Procedia Eng. 2016, 153, 59–65. [Google Scholar] [CrossRef]
- Andreev, V.I.; Turusov, R.A.; Tsybin, N.Y. Long strength of layered composite under normal fracture. Adv. Eng. Res. 2015, 39, 1703–1708. [Google Scholar]
- Turusov, R.A. Elastic and thermal behavior of a layered structure. Part II. Calculation results and their analysis. Mech. Compos. Mater. 2015, 51, 127–134. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| n | 4 | 6 | 10 | 20 | 40 | 80 |
|---|---|---|---|---|---|---|
| w0, mm | 11.64 | 11.90 | 12.04 | 12.10 | 12.12 | 12.12 |
| w800, mm | 16.90 | 17.12 | 17.15 | 17.12 | 17.10 | 17.10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chepurnenko, A. Nonlinear Rheological Processes Modeling in Three-Layer Plates with a Polyurethane Foam Core. Polymers 2022, 14, 2093. https://doi.org/10.3390/polym14102093
Chepurnenko A. Nonlinear Rheological Processes Modeling in Three-Layer Plates with a Polyurethane Foam Core. Polymers. 2022; 14(10):2093. https://doi.org/10.3390/polym14102093
Chicago/Turabian StyleChepurnenko, Anton. 2022. "Nonlinear Rheological Processes Modeling in Three-Layer Plates with a Polyurethane Foam Core" Polymers 14, no. 10: 2093. https://doi.org/10.3390/polym14102093
APA StyleChepurnenko, A. (2022). Nonlinear Rheological Processes Modeling in Three-Layer Plates with a Polyurethane Foam Core. Polymers, 14(10), 2093. https://doi.org/10.3390/polym14102093