
Mapping Permanent Gullies in an Agricultural Area Using Satellite Images: Efficacy of Machine Learning Algorithms




Abstract
:1. Introduction
2. Materials and Methods
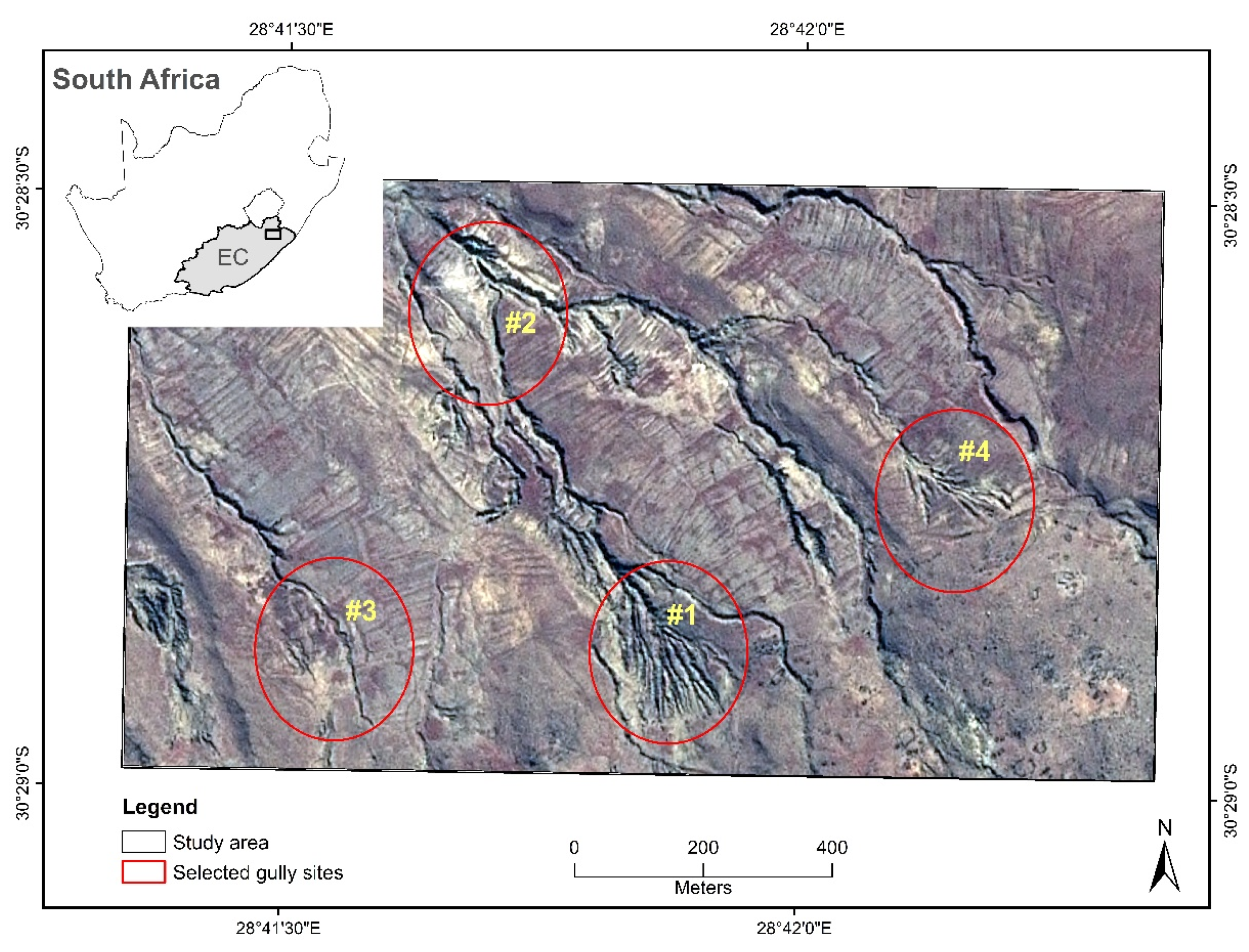
2.1. Study Area
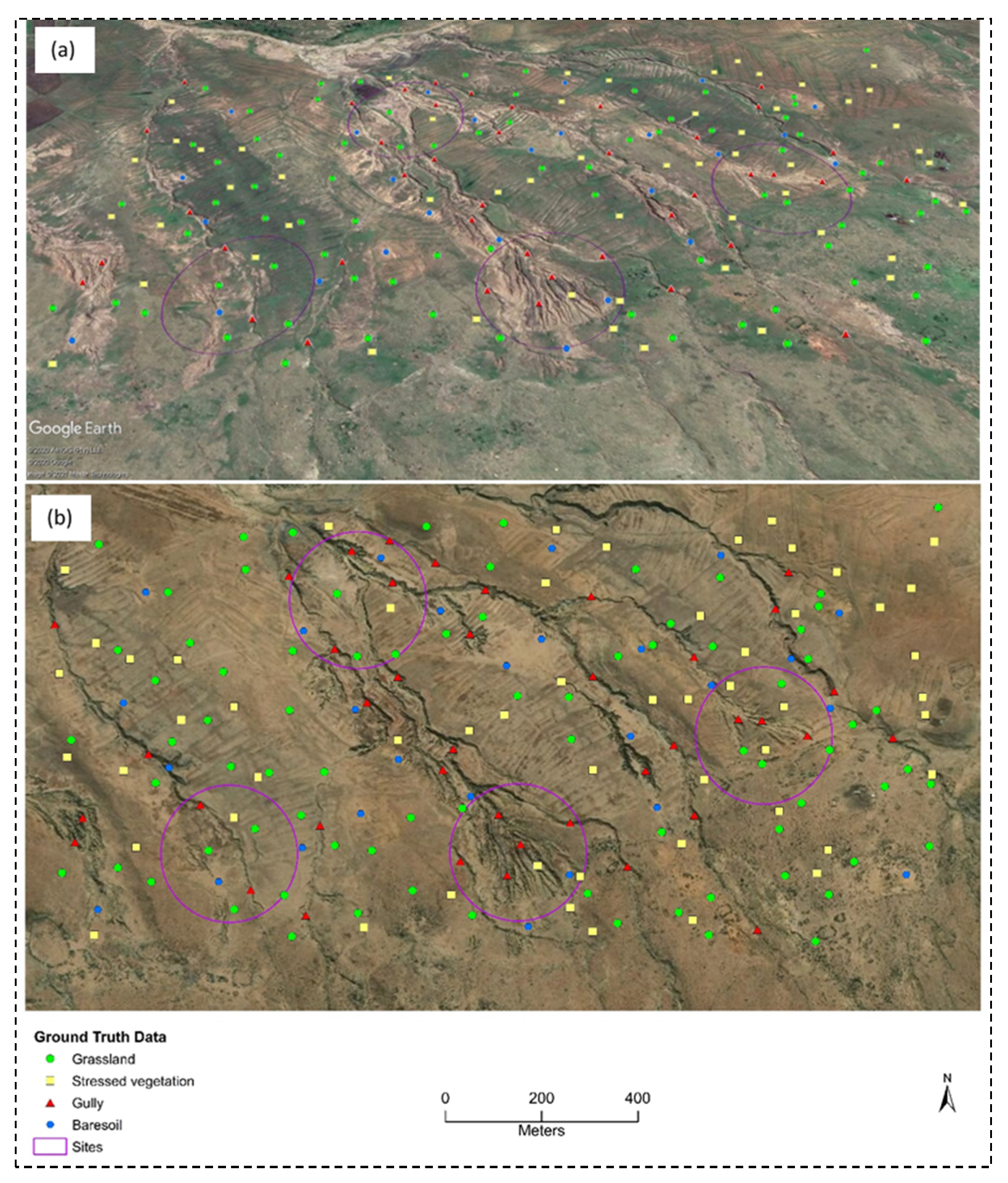
2.2. Data and Pre-Processing
2.3. Classification and Accuracy Assessment
3. Results
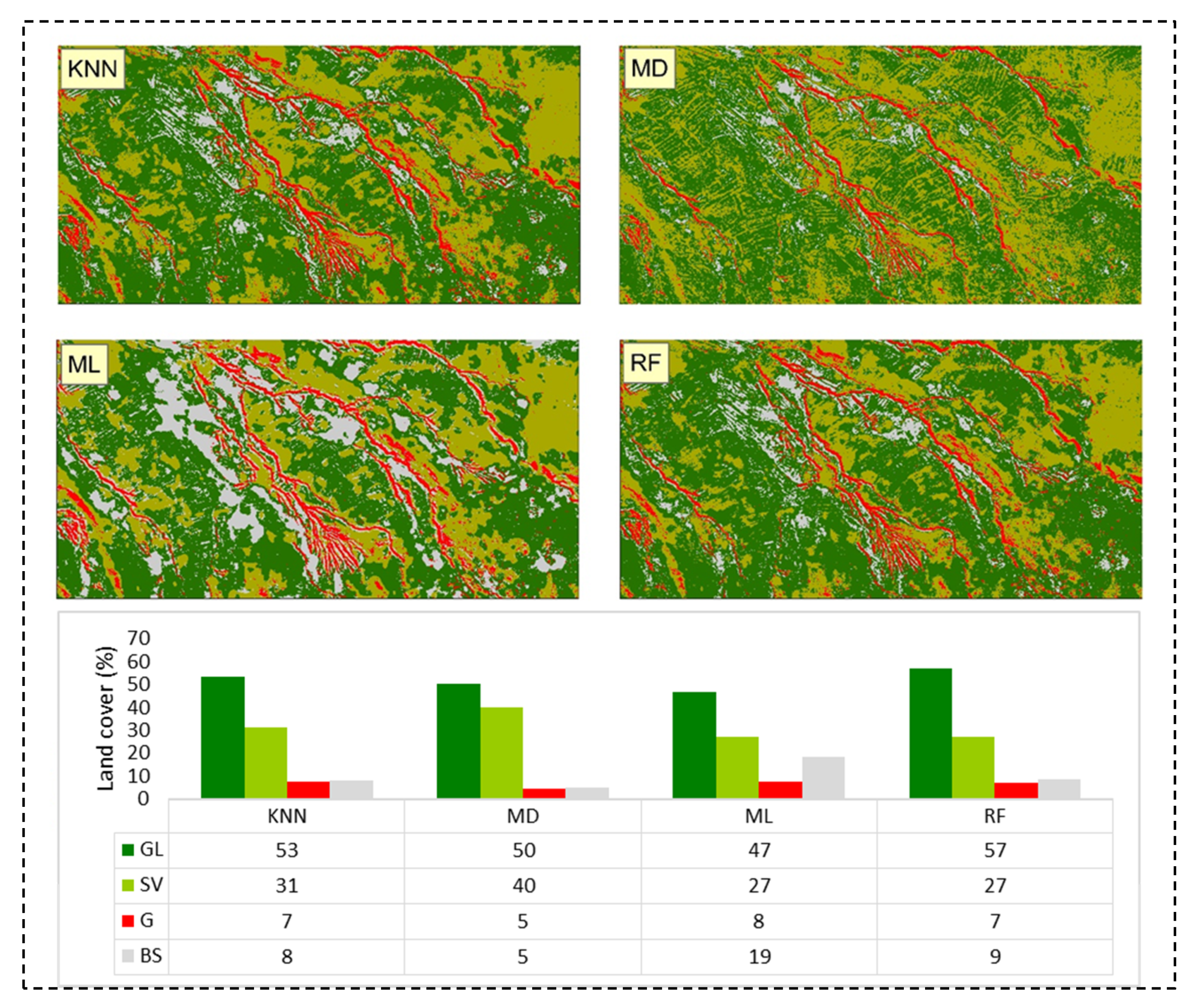
3.1. Land Cover Distribution
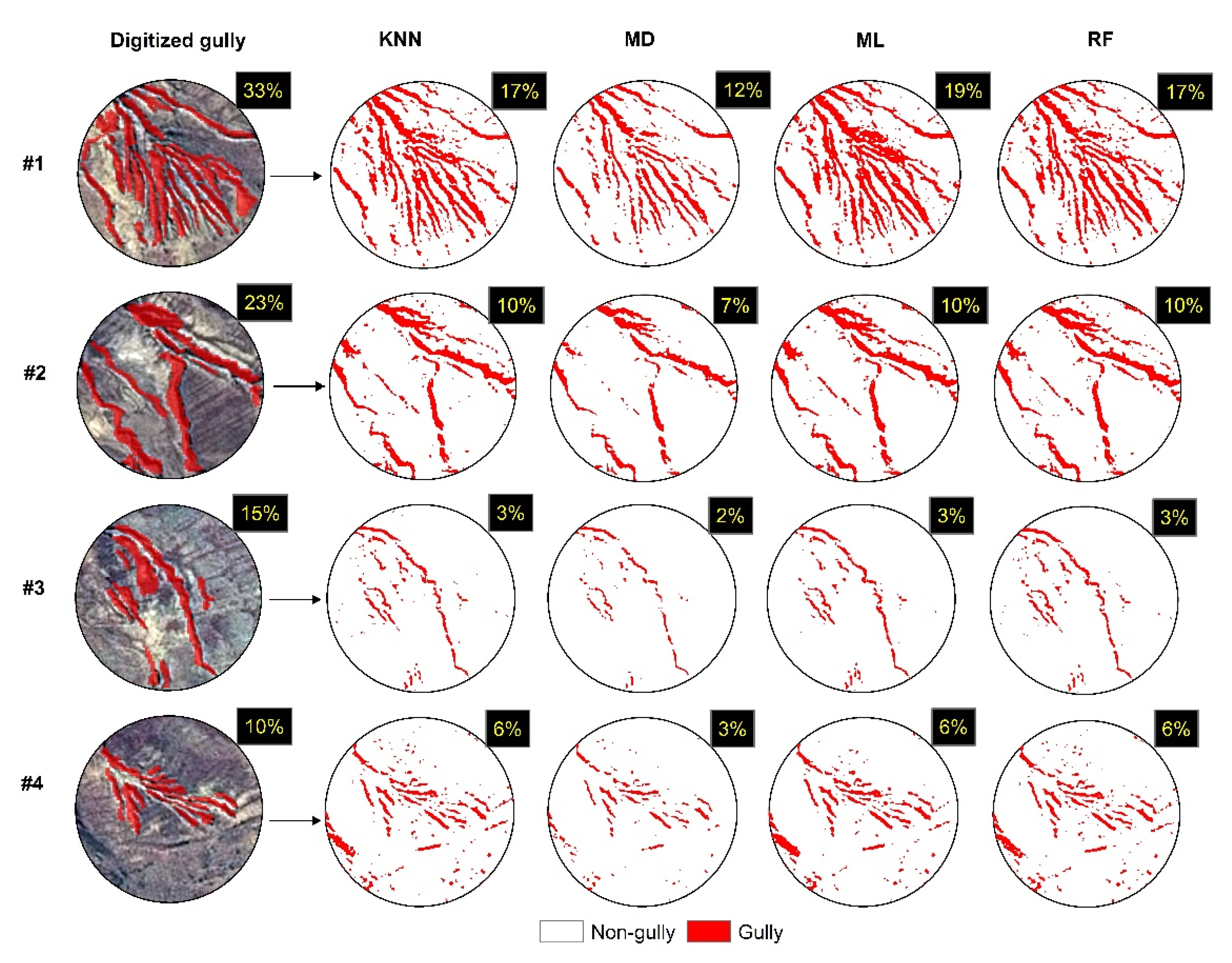
3.2. Gully Distribution in Selected Sites
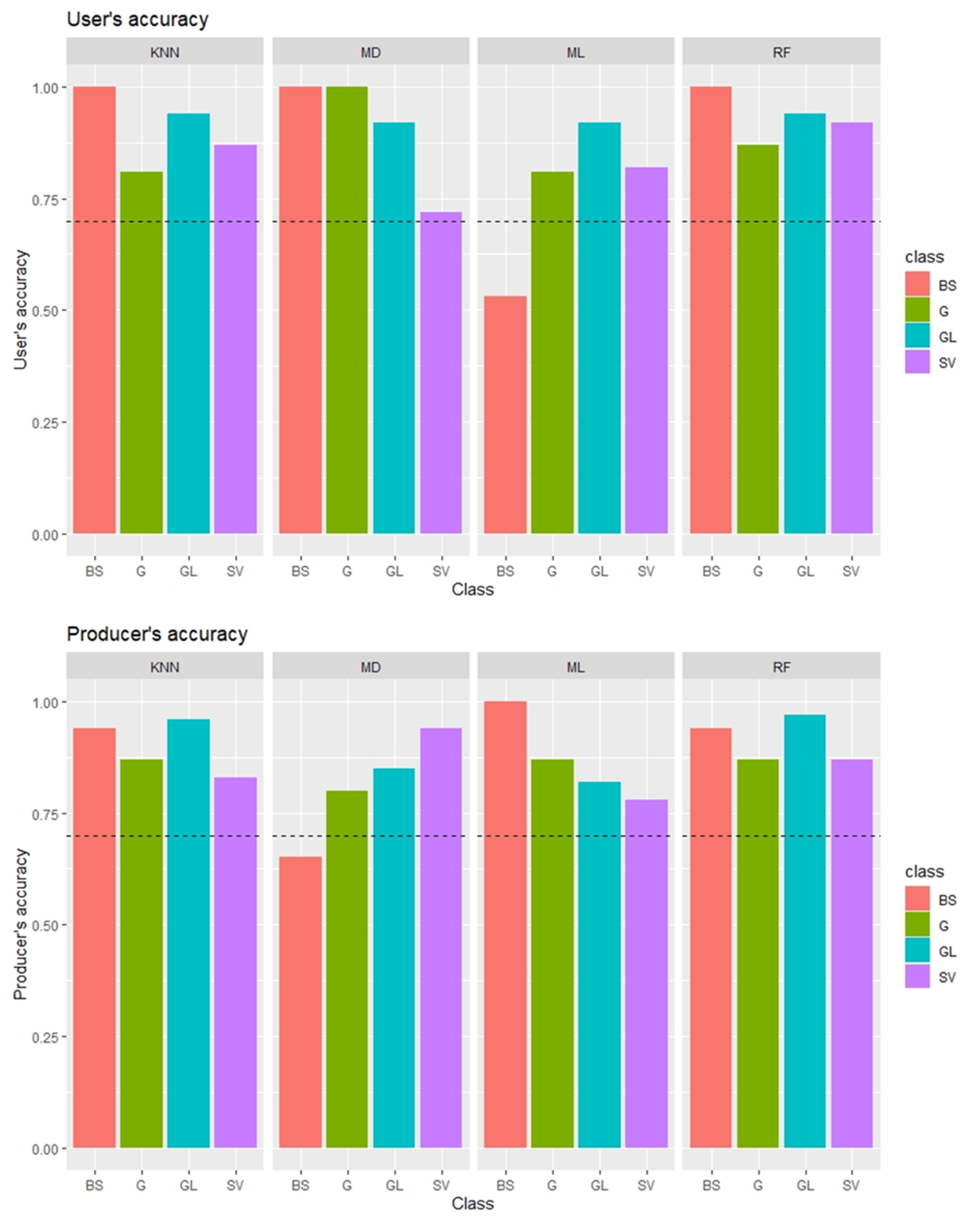
3.3. Overall and Class-Level Accuracies
4. Discussion
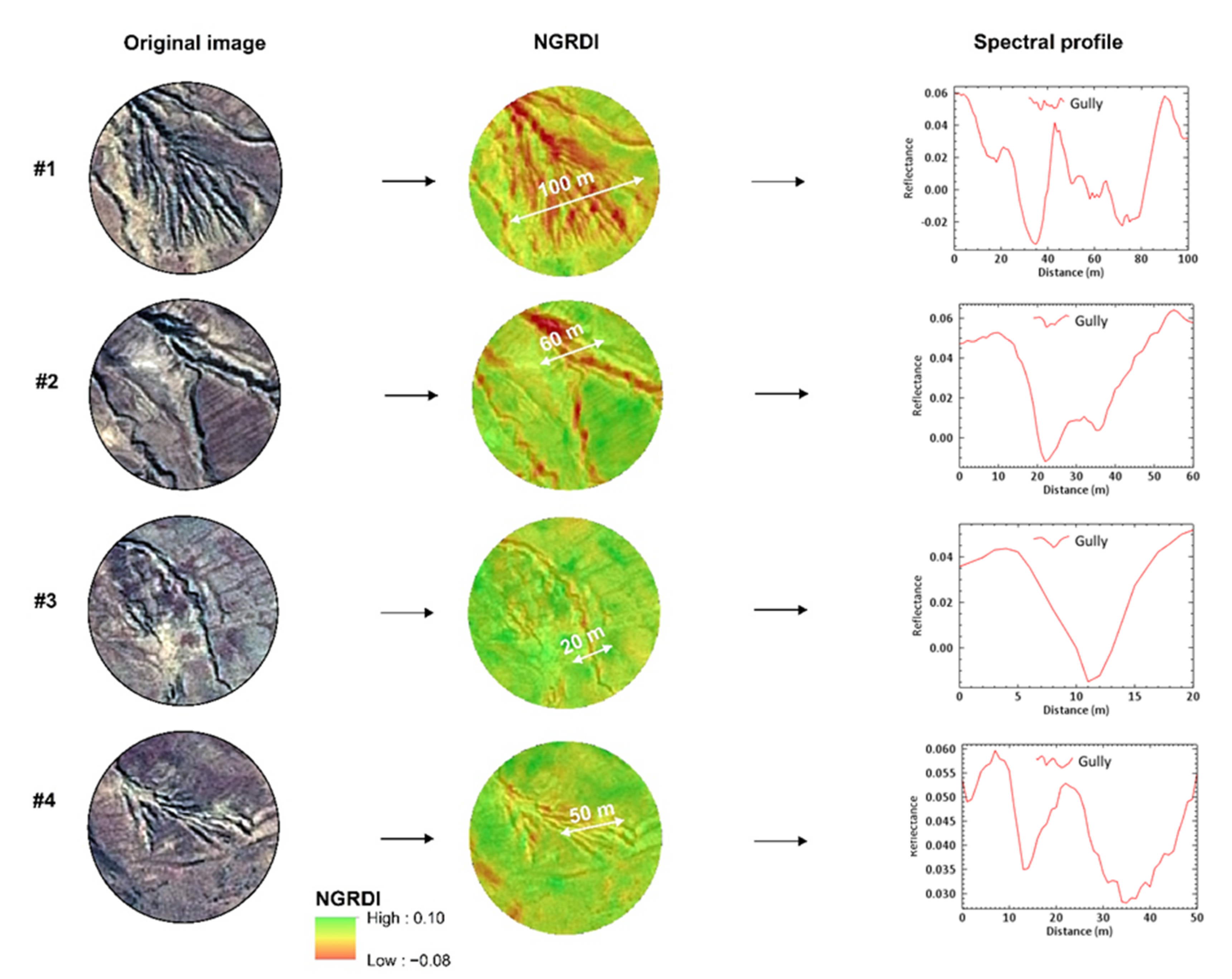
4.1. SPOT-7 RGB Bands and Gully Extraction
4.2. Efficacy of Machine Learnining Algorithms
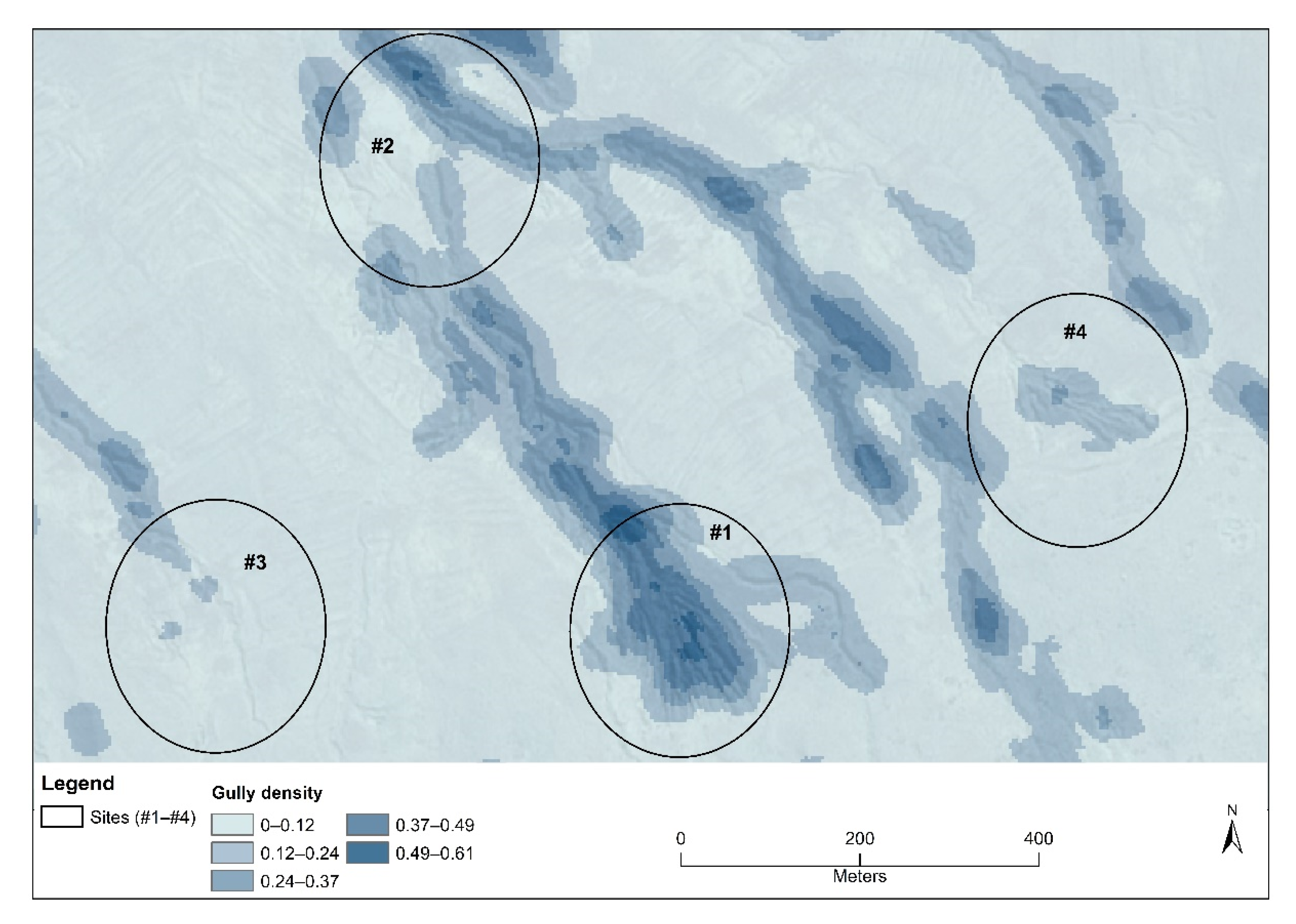
4.3. Gully Density Map
5. Conclusions
- Different characteristics of gullies, most notably, shape/pattern (e.g., dendritic) and depth, had a strong bearing on gully classification;
- No single classifier outperformed other classifiers in all accuracy metrics (e.g., OA, UA, and PA);
- All classifiers except ML had OA values that exceeded the 0.85 benchmark. RF showed the best performance regarding the OA (i.e., 0.94);
- MD was the most effective classifier in gully mapping based on UA (100%) but obtained the lowest PA (0.80), while KNN, ML, and RF classifiers equally recorded a PA value of 0.87;
- Despite the differences in UA and PA values, all classifiers crossed the 0.70 class-specific benchmark for gullies, but RF outperformed the other algorithms regarding the class-level accuracy metrics (UA and PA);
- Remote sensing, with the aid of appropriate machine learning algorithms, is a useful tool for gully density mapping;
- Although there are limitations to the usage of satellite images, this approach works well if there is no vegetation inside the gullies. Thus, the approach is suitable for arid/semiarid regions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shi, Z.H.; Fang, N.F.; Wu, F.Z.; Wang, L.; Yue, B.J.; Wu, G.L. Soil Erosion Processes and Sediment Sorting Associated with Transport Mechanisms On Steep Slopes. J. Hydrol. 2012, 454, 123–130. [Google Scholar] [CrossRef]
- Lal, R. Soil Degradation by Erosion. Land Degrad. Dev. 2001, 12, 519–539. [Google Scholar] [CrossRef]
- Pimentel, D. Soil Erosion: A Food and Environmental Threat. Environ. Dev. Sustain. 2006, 8, 119–137. [Google Scholar] [CrossRef]
- Food and Agriculture Organization of the United Nations. Soil Erosion: The Greatest Challenge for Sustainable Soil Management; FAO: Rome, Italy, 2019; ISBN 9780511807527. [Google Scholar]
- Kosmas, C.; Danalatos, N.; Cammeraat, L.H.; Chabart, M.; Diamantopoulos, J.; Farand, R.; Gutierrez, L.; Jacob, A.; Marques, H.; Martinez-Fernandez, J. The Effect of Land Use on Runoff and Soil Erosion Rates under Mediterranean Conditions. Catena 1997, 29, 45–59. [Google Scholar] [CrossRef]
- Blake, W.H.; Rabinovich, A.; Wynants, M.; Kelly, C.; Nasseri, M.; Ngondya, I.; Patrick, A.; Mtei, K.; Munishi, L.; Boeckx, P.; et al. Soil Erosion in East Africa: An Interdisciplinary Approach to Realising Pastoral Land Management Change. Environ. Res. Lett. 2018, 13. [Google Scholar] [CrossRef] [Green Version]
- Drees, L.R.; Wilding, L.P.; Owens, P.R.; Wu, B.; Perotto, H.; Sierra, H. Steepland Resources: Characteristics, Stability and Micromorphology. Catena 2003, 54, 619–636. [Google Scholar] [CrossRef]
- Phinzi, K.; Ngetar, N.S. The Assessment of Water-Borne Erosion at Catchment Level Using GIS-Based RUSLE and Remote Sensing: A Review. Int. Soil Water Conserv. Res. 2019, 7, 27–46. [Google Scholar] [CrossRef]
- Phinzi, K.; Ngetar, N.S.; Ebhuoma, O. Soil Erosion Risk Assessment in the Umzintlava Catchment (T32E), Eastern Cape, South Africa, Using RUSLE and Random Forest Algorithm. S. Afr. Geogr. J. 2020, 1–24. [Google Scholar] [CrossRef]
- Mohammed, S.; Al-Ebraheem, A.; Holb, I.J.; Alsafadi, K.; Dikkeh, M.; Pham, Q.B.; Linh, N.T.T.; Szabo, S. Soil Management Effects on Soil Water Erosion and Runoff in Central Syria—A Comparative Evaluation of General Linear Model and Random Forest Regression. Water 2020, 12, 2529. [Google Scholar] [CrossRef]
- Wischmeier, W.H.; Smith, D.D. Predicting Rainfall Erosion Losses: A Guide to Conservation Planning; Department of Agriculture, Science and Education Administration: Beltsville, MD, USA, 1978. [Google Scholar]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully Erosion and Environmental Change: Importance and Research Needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Bertalan, L.; Túri, Z.; Szabó, G. UAS Photogrammetry and Object-Based Image Analysis (Geobia): Erosion Monitoring at the Kazár badland, Hungary. Landsc. Environ. 2016, 10, 169–178. [Google Scholar] [CrossRef] [Green Version]
- Phinzi, K.; Ngetar, N.S. Mapping Soil Erosion in a Quaternary Catchment in Eastern Cape Using Geographic Information System and Remote Sensing. S. Afr. J. Geomat. 2017, 6, 11. [Google Scholar] [CrossRef] [Green Version]
- Bui, D.T.; Shirzadi, A.; Shahabi, H.; Chapi, K.; Omidavr, E.; Pham, B.T.; Asl, D.T.; Khaledian, H.; Pradhan, B.; Panahi, M.; et al. A Novel Ensemble Artificial Intelligence Approach for Gully Erosion Mapping in a Semi-Arid Watershed (Iran). Sens. Switz. 2019, 19, 2444. [Google Scholar] [CrossRef] [Green Version]
- Makaya, N.P.; Mutanga, O.; Kiala, Z.; Dube, T.; Seutloali, K.E. Assessing the Potential of Sentinel-2 MSI Sensor in Detecting and Mapping the Spatial Distribution of Gullies in a Communal Grazing Landscape. Phys. Chem. Earth 2019, 112, 66–74. [Google Scholar] [CrossRef]
- Karydas, C.; Panagos, P. Towards an Assessment of the Ephemeral Gully Erosion Potential in Greece Using Google Earth. Water 2020, 12, 603. [Google Scholar] [CrossRef] [Green Version]
- Phinzi, K.; Abriha, D.; Bertalan, L.; Holb, I.; Szabó, S. Machine Learning for Gully Feature Extraction Based on a Pan-Sharpened Multispectral Image: Multiclass vs. Binary Approach. ISPRS Int. J. Geo Inf. 2020, 9, 252. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Zhang, X.; Wang, Q.; Dai, F.; Gong, Y.; Zhu, K. Symmetrical Dense-Shortcut Deep Fully Convolutional Networks for Semantic Segmentation of Very-High-Resolution Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1633–1644. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep Learning in Remote Sensing Applications: A Meta-Analysis and Review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Heydari, S.S.; Mountrakis, G. Effect of Classifier Selection, Reference Sample Size, Reference Class Distribution and Scene Heterogeneity in Per-Pixel Classification Accuracy Using 26 Landsat Sites. Remote Sens. Environ. 2018, 204, 648–658. [Google Scholar] [CrossRef]
- Ge, W.; Cheng, Q.; Tang, Y.; Jing, L.; Gao, C. Lithological Classification Using Sentinel-2A Data in the Shibanjing Ophiolite Complex in Inner Mongolia, China. Remote Sens. 2018, 10, 638. [Google Scholar] [CrossRef] [Green Version]
- Szabó, S.; Burai, P.; Kovács, Z.; Szabó, G.; Kerényi, A.; Fazekas, I.; Paládi, M.; Buday, T.; Szabó, G. Testing Algorithms for the Identification of Asbestos Roofing Based on Hyperspectral Data. Environ. Eng. Manag. J. 2014, 143, 2875–2880. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. A Survey of Image Classification Methods and Techniques for Improving Classification Performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Fadul, H.M.; Salih, A.A.; Ali, I.E.A.; Inanaga, S. Use of Remote Sensing to Map Gully Erosion along the Atbara River, Sudan. Int. J. Appl. Earth Obs. Geoinf. 1999, 1999, 175–180. [Google Scholar] [CrossRef]
- Daba, S.; Rieger, W.; Strauss, P. Assessment of Gully Erosion in Eastern Ethiopia Using Photogrammetric Techniques. Catena 2003, 50, 273–291. [Google Scholar] [CrossRef]
- Mararakanye, N.; Le Roux, J.J. Gully Location Mapping at a National Scale for South Africa. S. Afr. Geogr. J. 2012, 94, 208–218. [Google Scholar] [CrossRef]
- Fiorucci, F.; Ardizzone, F.; Rossi, M.; Torri, D. The Use of Stereoscopic Satellite Images to Map Rills and Ephemeral Gullies. Remote Sens. 2015, 7, 14151–14178. [Google Scholar] [CrossRef] [Green Version]
- James, L.A.; Watson, D.G.; Hansen, W.F. Using LiDAR Data to Map Gullies and Headwater Streams under Forest Canopy: South Carolina, USA. Catena 2007, 71, 132–144. [Google Scholar] [CrossRef]
- Korzeniowska, K.; Pfeifer, N.; Landtwing, S. Mapping Gullies, Dunes, Lava Fields, and Landslides via Surface Roughness. Geomorphology 2018, 301, 53–67. [Google Scholar] [CrossRef]
- Rijal, S.; Wang, G.; Woodford, P.B.; Howard, H.R.; Hutchinson, J.M.S.; Hutchinson, S.; Schoof, J.; Oyana, T.J.; Li, R.; Park, L.O. Detection of Gullies in Fort Riley Military Installation Using LiDAR Derived High Resolution DEM. J. Terramech. 2018, 77, 15–22. [Google Scholar] [CrossRef]
- Đomlija, P.; Gazibara, S.B.; Arbanas, Ž.; Arbanas, S.M. Identification and Mapping of Soil Erosion Processes Using the Visual Interpretation of Lidar Imagery. ISPRS Int. J. Geo Inf. 2019, 8, 438. [Google Scholar] [CrossRef] [Green Version]
- Garland, G.G.; Hoffman, M.T.; Todd, S. Soil Degradation. In A National Review of Land Degradation in South Africa, Hoffman, M.T., Todd, S., Ntshona, Z., Turner, S., Eds.; South African National Biodiversity Institute: Pretoria, South Africa, 2000; pp. 69–107. [Google Scholar]
- Acocks, J.P.H. Veld types of South Africa; BRIT Press: Fort Worth, TX, USA, 1988; ISBN 0621113948. [Google Scholar]
- Kakembo, V.; Rowntree, K.M. The Relationship between Land Use and Soil Erosion in the Communal Lands near Peddie Town, Eastern Cape, South Africa. L. Degrad. Dev. 2003, 14, 39–49. [Google Scholar] [CrossRef]
- Phinzi, K.; Ngetar, N.S. Land Use/Land Cover Dynamics and Soil Erosion in the Umzintlava Catchment (T32E), Eastern Cape, South Africa. Trans. R. Soc. S. Afr. 2019, 74, 223–237. [Google Scholar] [CrossRef]
- van Breda Weaver, A. The Distribution of Soil Erosion as a Function of Slope Aspect and Parent Material in Ciskei, Southern Africa. GeoJournal 1991, 23, 29–34. [Google Scholar] [CrossRef]
- Beckedahl, H.R.; de Villiers, A.B. Accelerated Erosion by Piping in the Eastern Cape Province, South Africa. S. Afr. Geogr. J. 2000, 82, 157–162. [Google Scholar] [CrossRef]
- Hilbich, C.; Daut, G.; Mäusbacher, R.; Helmschrot, J. A Landscape-Based Model to Characterize the Evolution and Recent Dynamics of Wetlands in the Umzimvubu Headwaters, Eastern Cape, South Africa; Okruszko, T., Maltby, E., Szatylowicz, J., Miroslaw-Swiatek, D., Eds.; Taylor & Francis Group: Oxfordshire, UK, 2007; p. 61. ISBN 978-0-415-40820-2. [Google Scholar]
- Thanh Noi, P.; Kappas, M. Comparison of Random Forest, K-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sens. Basel 2017, 18, 18. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Richards, J.A.; Richards, J.A. Remote Sensing Digital Image Analysis; Springer: New York, NY, USA, 1999; Volume 3, ISBN 3642300618. [Google Scholar]
- Bolstad, P.V.; Lillesand, T.M. Rapid Maximum Likelihood Classification. Photogramm. Eng. Remote Sens. 1991, 57, 67–74. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G. A Review of Assessing the Accuracy of Classifications of Remotely Sensed Data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2019; ISBN 0429629354. [Google Scholar]
- Everitt, J.H.; Yang, C.; Fletcher, R.; Deloach, C.J. Comparison of QuickBird and SPOT 5 Satellite Imagery for Mapping Giant Reed. J. Aquat. Plant Manag. 2008, 46, 77–82. [Google Scholar]
- Khatami, R.; Mountrakis, G.; Stehman, S.V. A Meta-Analysis of Remote Sensing Research on Supervised Pixel-Based Land-Cover Image Classification Processes: General Guidelines for Practitioners and Future Research. Remote Sens. Environ. 2016, 177, 89–100. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An Assessment of the Effectiveness of a Random Forest Classifier for Land-Cover Classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- He, H.; Garcia, E.A. Learning from Imbalanced Data. IEEE Trans. Knowl. Data Eng. 2009, 21, 1263–1284. [Google Scholar]
- Mararakanye, N.; Nethengwe, N.S. Gully Erosion Mapping Using Remote Sensing Techniques. S. Afr. J. Geomat. 2012, 1, 109–118. [Google Scholar]
- d’Oleire-Oltmanns, S.; Marzolff, I.; Tiede, D.; Blaschke, T. Detection of Gully-Affected Areas by Applying Object-Based Image Analysis (OBIA) in the Region of Taroudannt, Morocco. Remote Sens. 2014, 6, 8287–8309. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Liu, G.; Duan, X.; Wilson, G.V. Spatial Distribution and Morphologic Characteristics of Gullies in the Black Soil Region of Northeast China: Hebei Watershed. Phys. Geogr. 2016, 37, 228–250. [Google Scholar] [CrossRef]
- Muñoz-Robles, C.; Reid, N.; Frazier, P.; Tighe, M.; Briggs, S.V.; Wilson, B. Factors Related to Gully Erosion in Woody Encroachment in South-Eastern Australia. Catena 2010, 83, 148–157. [Google Scholar] [CrossRef]
- Le Roux, J.J.; Newby, T.S.; Sumner, P.D. Monitoring Soil Erosion in South Africa at a Regional Scale: Review and Recommendations. S. Afr. J. Sci. 2007, 103, 329–335. [Google Scholar]
- Phinzi, K.; Ngetar, N.S.; Ebhuoma, O.; Szabó, S. Comparison of Rusle and Supervised Classification Algorithms for Identifying Erosion-Prone Areas in a Mountainous Rural Landscape. Carpathian J. Earth Environ. Sci. 2020, 15. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classifier | Brief Description |
|---|---|
| k-d tree KNN | This is one of the simplest non-parametric algorithms that classify features based on distance functions. The classifier does this by finding the closest pixels to unknown pixels [42]. The classifier was run with five neighbors, which is the default. |
| MD | A non-parametric algorithm, MD uses the mean vectors of each endmember and calculates the Euclidean distance from each unknown pixel to the mean vector for each class [43]. Minimum and maximum power set size parameters were left at their default values: two and seven, respectively. |
| ML | This algorithm is among the most popular parametric classification methods, whereby a pixel with the highest probability of membership is classified into the corresponding class [44]. Like the MD classifier, ML was applied with minimum and maximum power set size parameters defaulting to two and seven, respectively. |
| RF | RF is a non-parametric classification and regression tree-based technique, which randomly samples the data and variables to generate a large group (forest) of classification and regression trees [45]. An important parameter of the algorithm is ntree (number of trees) which was set to 100 in this study. |
| Site #1 | Site #2 | Site #3 | Site #4 | |||||
|---|---|---|---|---|---|---|---|---|
| Method | Pixels | Area (m2) | Pixels | Area (m2) | Pixels | Area (m2) | Pixels | Area (m2) |
| KNN | 911 | 9321 | 547 | 5601 | 173 | 1774 | 306 | 3129 |
| MD | 632 | 6463 | 393 | 4026 | 102 | 1039 | 163 | 1668 |
| ML | 1011 | 10,344 | 558 | 5706 | 157 | 1610 | 302 | 3088 |
| RF | 898 | 9193 | 548 | 5607 | 171 | 1747 | 308 | 3147 |
| Digitized | 1750 | 17,908 | 1210 | 12,382 | 788 | 8064 | 556 | 5690 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phinzi, K.; Holb, I.; Szabó, S. Mapping Permanent Gullies in an Agricultural Area Using Satellite Images: Efficacy of Machine Learning Algorithms. Agronomy 2021, 11, 333. https://doi.org/10.3390/agronomy11020333
Phinzi K, Holb I, Szabó S. Mapping Permanent Gullies in an Agricultural Area Using Satellite Images: Efficacy of Machine Learning Algorithms. Agronomy. 2021; 11(2):333. https://doi.org/10.3390/agronomy11020333
Chicago/Turabian StylePhinzi, Kwanele, Imre Holb, and Szilárd Szabó. 2021. "Mapping Permanent Gullies in an Agricultural Area Using Satellite Images: Efficacy of Machine Learning Algorithms" Agronomy 11, no. 2: 333. https://doi.org/10.3390/agronomy11020333
APA StylePhinzi, K., Holb, I., & Szabó, S. (2021). Mapping Permanent Gullies in an Agricultural Area Using Satellite Images: Efficacy of Machine Learning Algorithms. Agronomy, 11(2), 333. https://doi.org/10.3390/agronomy11020333