1. Introduction
Remote sensing (RS) with unmanned aerial vehicles (UAV) has been widely used in crop growth monitoring in the last decade due to its high time and spatial resolution [
1,
2,
3]. The UAV platform is capable of carrying various types of sensors to acquire multi-source RS data. Red, green, and blue (RGB), multispectral, and hyperspectral cameras have been mounted on UAVs to detect agronomic traits, such as chlorophyll content [
4,
5,
6], leaf area index [
4,
7,
8,
9,
10], aboveground biomass [
10,
11], and nitrogen content [
12,
13,
14], by researchers around the world.
Spectral cameras can obtain both spectra (usually in the range of visible to near infrared) and images of targets. Strictly calibrated spectra are closely related to plant biophysical and biochemical characteristics [
3], which makes spectral cameras very suitable for crop growth monitoring. There are a variety of types of UAV-based spectral cameras, which are usually classified as hyperspectral and multispectral cameras and generate different kinds of data. Hyperspectral cameras have high spectral resolution (usually between 1–10 nm) with hundreds of bands and contain rich information, which is very useful for multiple crop characteristic estimations [
15]. But hyperspectral image data are also large in size and difficult to deal with. In contrast to hyperspectral cameras, multispectral cameras usually have several or dozens of bands and are easier to obtain, deploy, and analyze. It has been found that the performances of different multispectral sensors (such as Mini-MCA6, Micasense RedEdge, Parrot Sequoia, and DJI P4M) and hyperspectral sensors (such as Senop HSC-2, Cubert UHD185, and OXI VNIR-40) in the same study area matched well with the field spectrometer measurements on the ground, and the correlation coefficients of spectral reflectance and several frequently-used vegetation indices for the same targets between different sensors in the same conditions usually reach 0.9 or higher, indicating good consistency [
1,
16,
17,
18,
19,
20,
21,
22]. However, the performance of hyperspectral and multispectral cameras for monitoring the characteristics of the same crop in different conditions still remains unknown.
The measurement area of UAVs, especially multi-rotor UAVs, is relatively small because of the limited flight height and battery capacity [
23]. Consequentially, studies on crop monitoring with UAV-based remote sensing were always restricted to a certain limited geographic region with an area of several hectares. Therefore, questions remain about whether the spectral responses to the same trait, for example leaf chlorophyll content (LCC), are consistent on different UAV-based spectral images and in different regions, and whether the trait can be predicted by a general model.
LCC, which is closely related to plant production, is one of the most important agronomy parameters in crop growth monitoring with remote sensing [
24,
25]. The SPAD value, a dimensionless quantity, is the reading of the SPAD chlorophyll meter (Minolta corporation, Ltd., Osaka, Japan) that is used to measure the relative chlorophyll content of leaves [
26,
27]. LCC have been proved to be proportional to the amount of chlorophyll and nitrogen in the crop leaf and widely used by researchers and farmers to determine chlorophyll content and fertilizer management [
28,
29,
30]. The greatest advantage of the SPAD chlorophyll meter is that it can nondestructively measure in situ leaf chlorophyll content in real time, which makes it ideal for the correspondence with UAV measurements. However, ground measurements using handheld SPAD chlorophyll meters can only provide the LCC of crops within a limited part of the field.
UAV-based remote sensing retrieval of LCC helps to draw the distribution map of LCC in a large-scale field investigation and has been studied by various academic groups on different crops using different sensors such as multispectral cameras, hyperspectral imagers, and RGB cameras. Spectral reflectance at green, red, red-edge, and near-infrared bands and vegetation indices such as normalized difference vegetation index (NDVI), difference vegetation index (DVI), ratio vegetation index (RVI), green normalized difference vegetation index (GNDVI), MERIS terrestrial chlorophyll index (MTCI), and excess green index (ExG) were used to build LCC estimation models for wheat, maize, and barley via different regression methods like multiple linear regression (MLR), partial least squares regression (PLSR), support vector regression (SVR), random forest regression (RFR), and back propagation neural network (BP-NN). Most of the models achieved high accuracy [
1,
24,
31,
32,
33,
34]. However, as far as we are aware, there is a lack of studies on the estimation of rice (
Oryza sativa L.) LCC using UAV-based remote sensing in different regions and by different sensors.
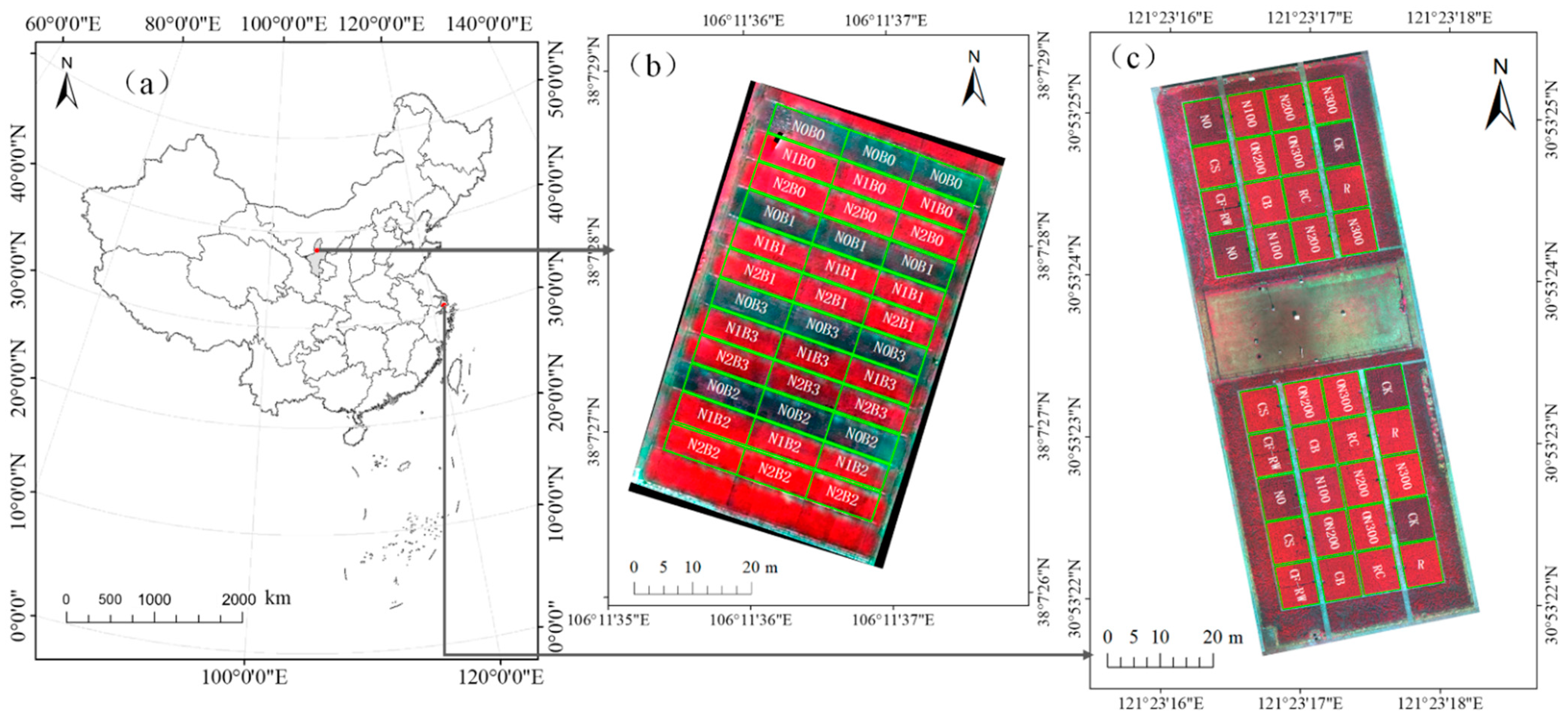
Rice, as an important food crop, is widely grown all over the world. Efficient monitoring of LCC plays an important role in the cultivation and management of rice. In this paper, the estimation of rice LCC using UAV hyperspectral and multispectral images in Ningxia and Shanghai, China, was studied to (1) investigate the spectral response characteristics of rice LCC in different geographic regions and by different sensors, and (2) establish general estimation models of rice LCC for different geographic regions and sensors.
4. Discussion
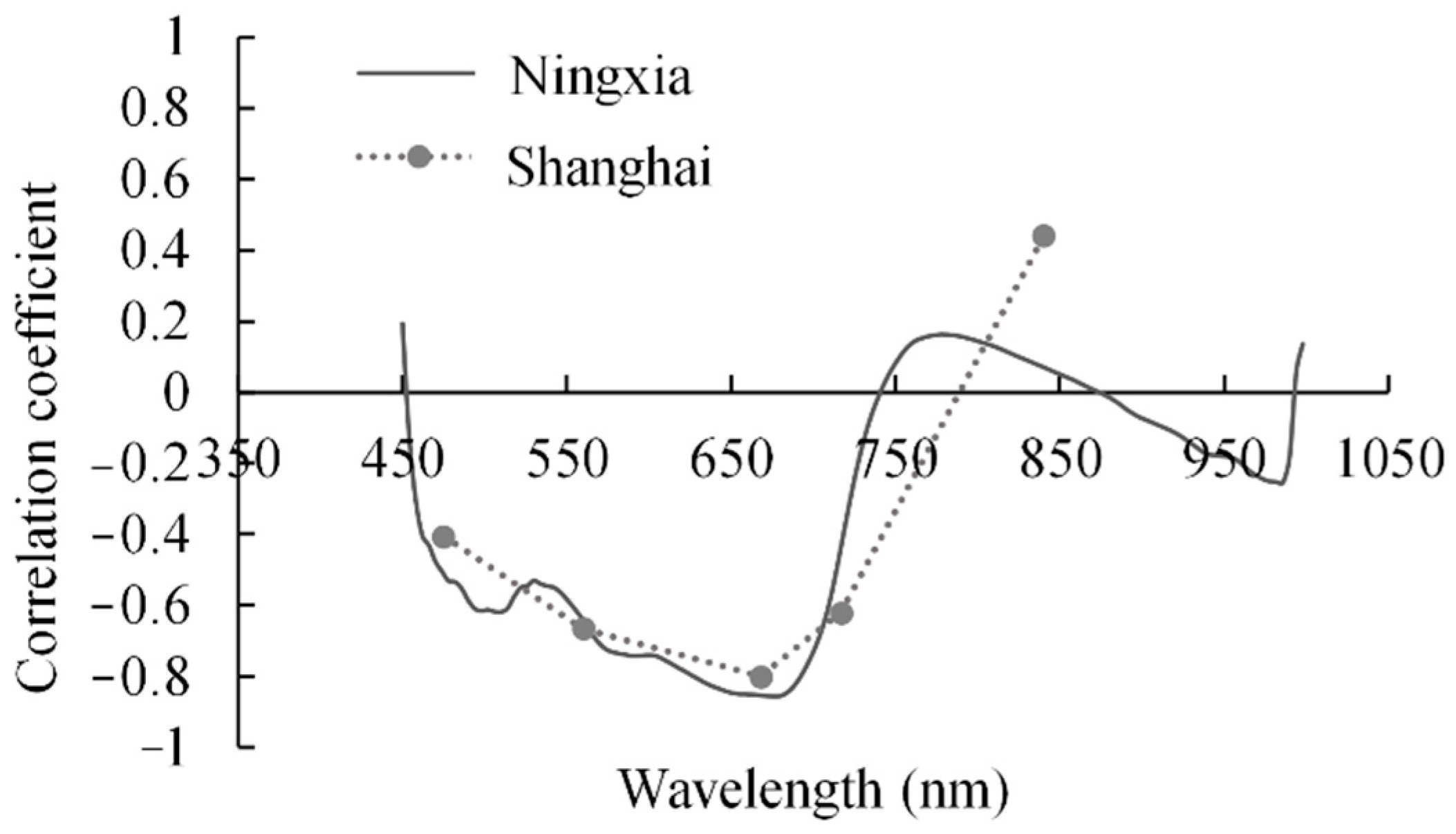
In this study, we found that despite the differencse in the region, variety, and sensor, the correlation between rice LCC, spectral reflectance, and vegetation indices in Ningxia and Shanghai had similarities. This result was in accordance with the previous findings by researchers on the spectral characteristics of rice LCC or chlorophyll content using visible and near-infrared spectrometers [
50,
51,
52,
53], which indicated that the spectral responses of rice LCC or chlorophyll content shared the same pattern, that is, the spectral reflectance and rice LCC had significant negative correlations at the wavelength range of 450–720 nm. The eight vegetation indices were found to be closely related to rice LCC, which was in accordance with the findings by Xie [
50]. On the other side, differences in spectral reflectance in the NIR range between Ningxia and Shanghai can be observed. The most possible reason was that the Shanghai group contained more data collected in the maturation stage, when the correlation between LCC and spectral reflectance in the NIR range was higher than at other growth stages [
54]. Similar phenomena were also found in other crops such as wheat, maize, and potatoes [
25,
55,
56]. Since the field remote sensing data collection largely depended on weather conditions, the growth stages when the field campaigns were carried out were not unified in different study areas and years. The difference between Ningxia and Shanghai groups in growth stage also affected the response of vegetation indices and model accuracy.
Theoretically, the reflectance of the same target measured under standard conditions by different spectral sensors, which are strictly calibrated should be coincident. However, in the actual measurement operation, the spectral reflectance value is affected by band-response functions, spatial resolution, and environmental factors such as atmospheric transmissivity, solar zenith angle, solar declination angle, and soil background, which would cause a systematic difference [
1,
57]. Vegetation indices, which are designed to be particularly sensitive to vegetative covers, are less affected by those factors [
58,
59]. The rice fields in Ningxia and Shanghai are at different latitudes, with different soil backgrounds and solar illumination geometry. The spectral response functions and spatial resolution of S185 and Redege 3 also vary. In order to minimize the error in spectral reflectance caused by the environment and sensor type and make the variables available for both regions, vegetation indices rather than spectral reflectance were chosen as independent variables in the rice leaf SPAD estimation models.
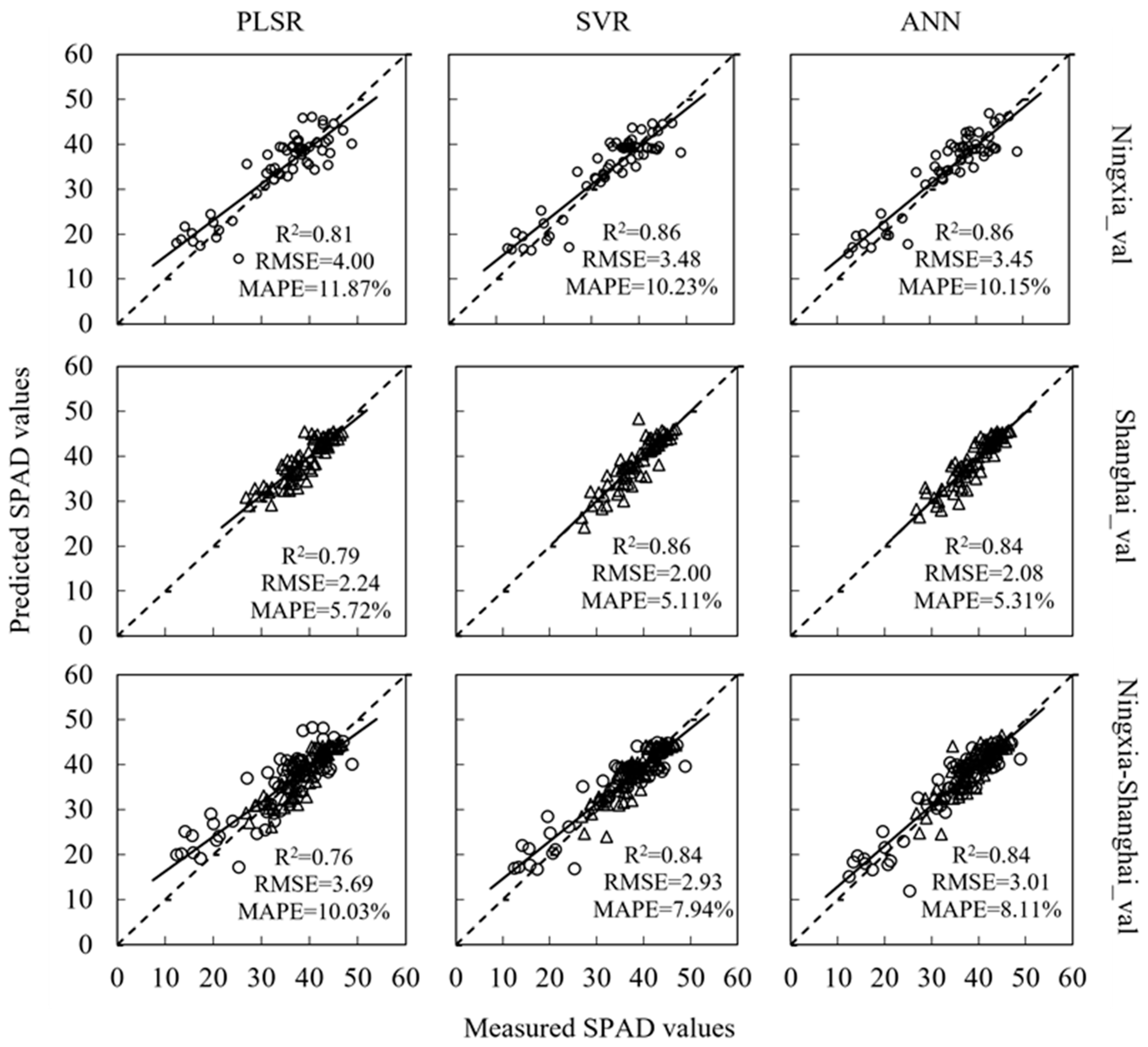
The validation of rice LCC estimation models for the Ningxia-Shanghai group indicated that the models were capable of predicting LCC of rice in both Ningxia and Shanghai with relatively low errors, which answered the question of whether a certain crop trait could be predicted by a general model for different regions and sensors. In addition, the interaction validation of PLSR models of Ningxia and Shanghai in
Section 3.4.2 also yielded good predicting results with MAPE less than 20%, which indicated that, based on the same spectral response pattern, a model of the same crop trait constructed for one region and spectral sensor using the PLSR method was still available for another region and sensor. It is impossible to build new models for every new region in the application of remote sensing monitoring of crop growth. In cases where no prior data is available, models transplanted from another region and sensors could be used to provide informative results.
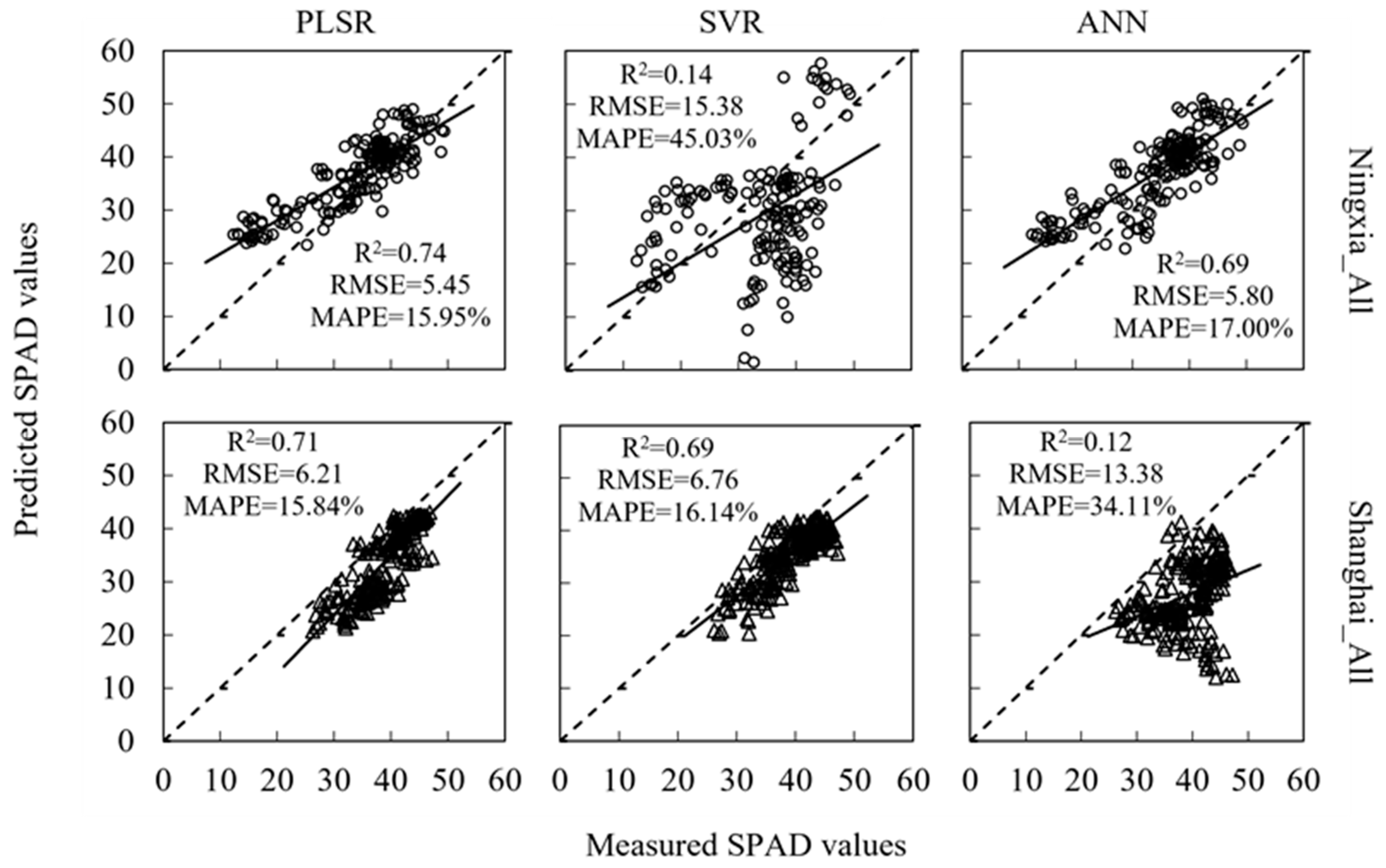
The performances of models using different regression methods varied in validation steps. Models using two machine learning methods, SVR and ANN, achieved high accuracy when validated by the validation sub-dataset from the same group of the dataset (
Section 3.4.1). However, the LCC prediction accuracy decreased dramatically when SVR or ANN models for one region were applied to the other, implying limited generalization ability (
Section 3.4.2). PLSR models showed better prediction accuracy and stability in the interactive validation. Although machine learning is effective in data mining, the lack of interpretability may increase the uncertainty of the model [
60]. Previous studies have suggested that the training data has a strong influence on the performance of machine learning methods, and extreme attention should be paid when applying regression models with machine learning algorithms to data collected under different conditions from the training data [
61]. There are several possible explanations, as follows: The data from the two study areas had global features in common (for example, the same spectral response pattern as LCC), as well as local features of their own that were caused by the difference in location, cultivar, and sensor. Two machine learning methods, SVR and ANN, would make the most of both global and local features within the training dataset in the modeling procress to minimize prediction error. However, the difference in local features would lower the prediction accuracy when applying the machine learning-based models to another dataset. In contrast, the PLSR method mainly used global features in model construction, thus resulting in better generalization ability than SVR and ANN.
5. Conclusions
The application of UAV-based remote sensing to crop growth monitoring has gradually entered the practical stage. Therefore, it is of great importance to develop remote sensing models for crop monitoring, which are suitable for multiple regions and types of sensors. In this study, images of rice fields in two different regions were acquired by multispectral and hyperspectral cameras mounted on UAV platforms. Analysis of the spectral response of rice LCC in different regions showed a similar pattern: spectral reflectance at the green and red bands, as well as two vegetation indices (NDVI and NPCI), were highly correlated with the LCC. All the estimation models of rice LCC yielded good accuracy within the group where the training data came from. Models built with PLSR rather than SVR and ANN, which achieved outstanding performance in the interactive validation, had the potential to be used as general estimation models of rice LCC.
As far as we know, this was the first approach to building models based on UAV-based remote sensing data from different regions and sensors. It demonstrates that it is feasible to study general models for UAV-based retrieval of agronomic parameters. The outcomes of this study could be used by practitioners and organizations to develop sensors that can directly produce LCC or chlorophyll content distribution maps based on spectral images of rice fields, which is very intuitive and helpful for farmers.
This study involved two independent experiments, the conditions of which varied in many aspects. It is difficult to analyze the influence of specific factors on the LCC estimation. Therefore, this paper focused on finding the common points in the spectral response and estimation models of the two experiments. In the future, experiments with carefully controlled conditions should be designed for more in-depth studies on the influence of specific factors such as flight height, time, and weather.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}