
Design and Analysis of a Flexible Adaptive Supporting Device for Banana Harvest


 ,
,
Abstract
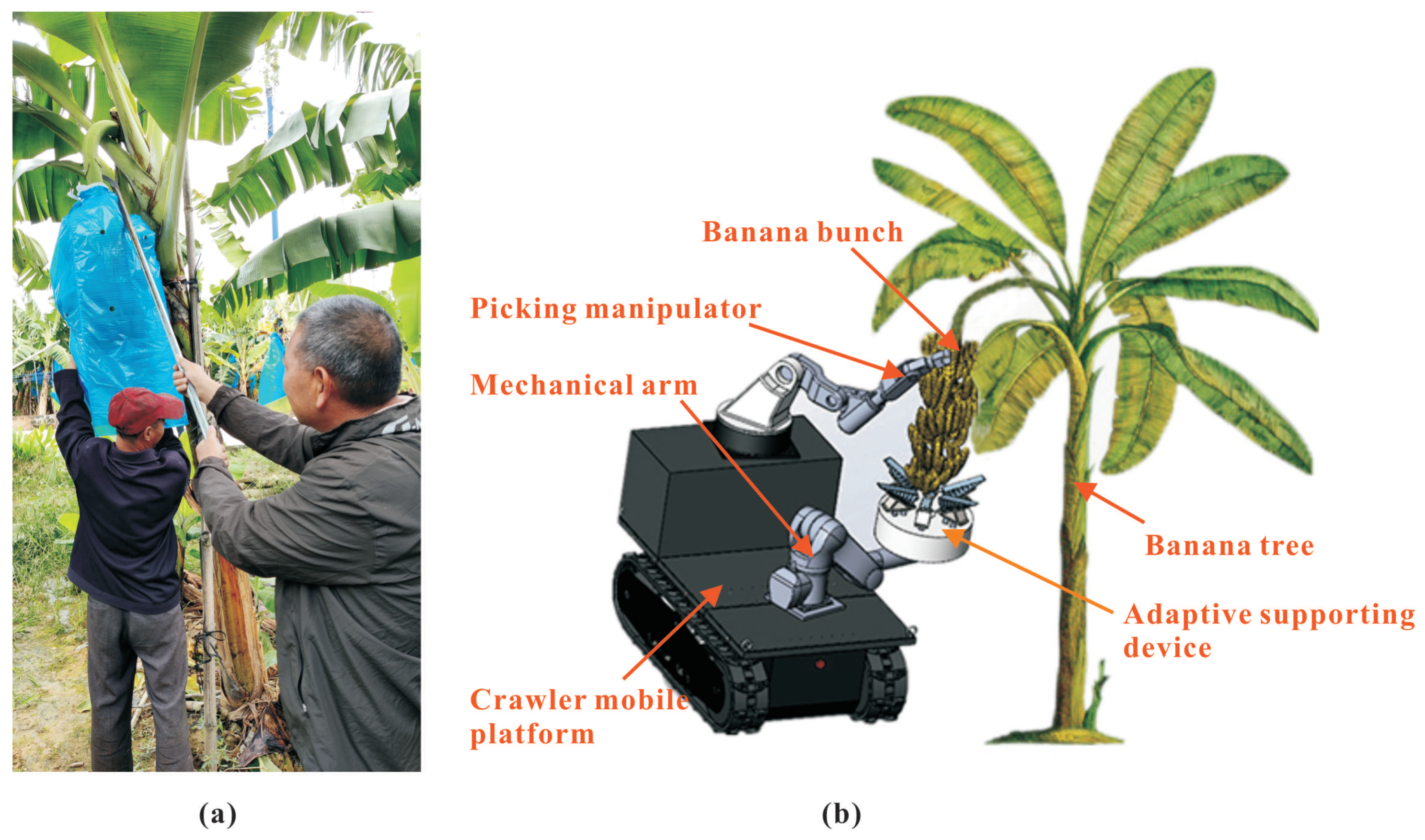
:1. Introduction
2. Principle and Structure of the Supporting Device
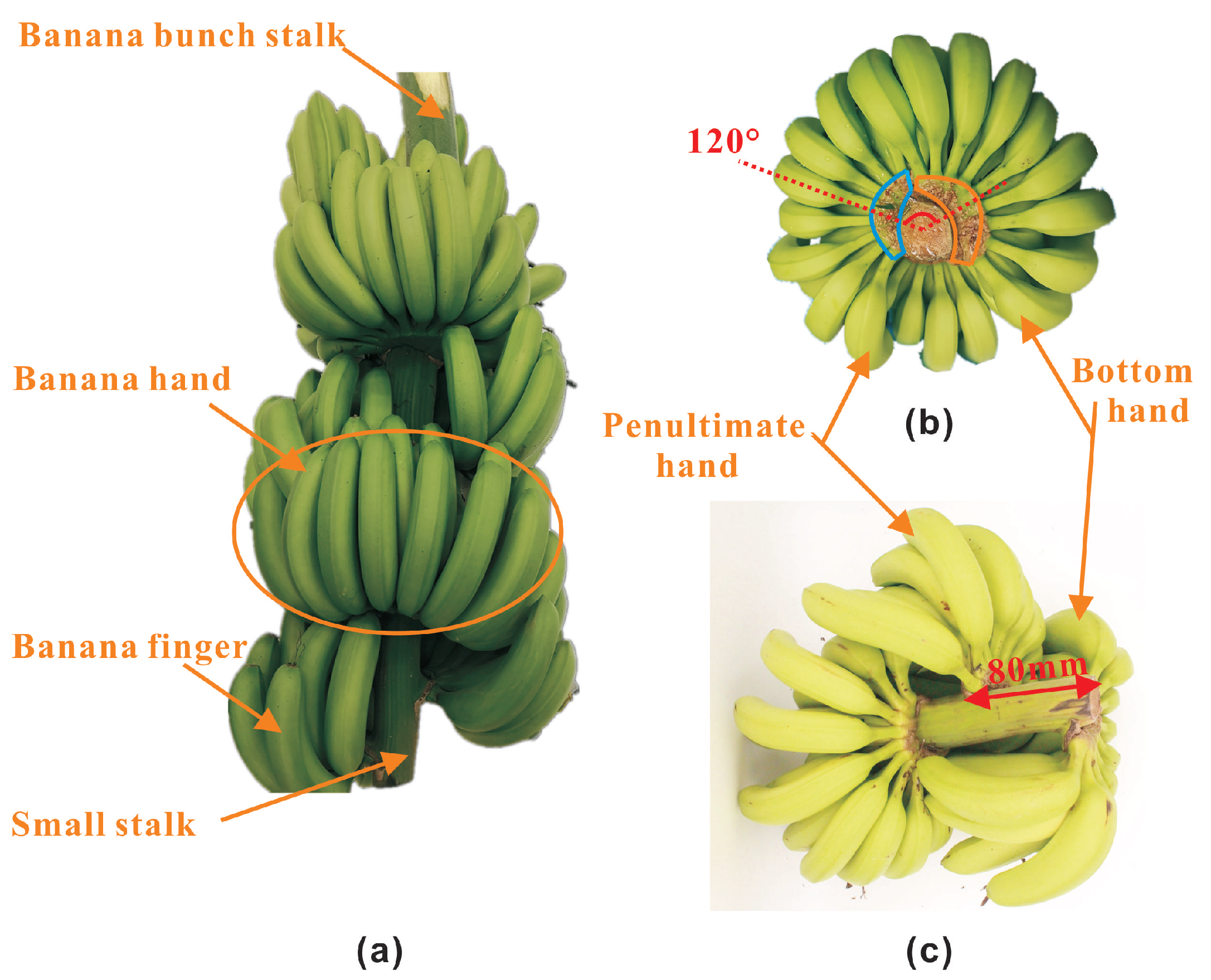
2.1. Parameters of the Banana Bunch
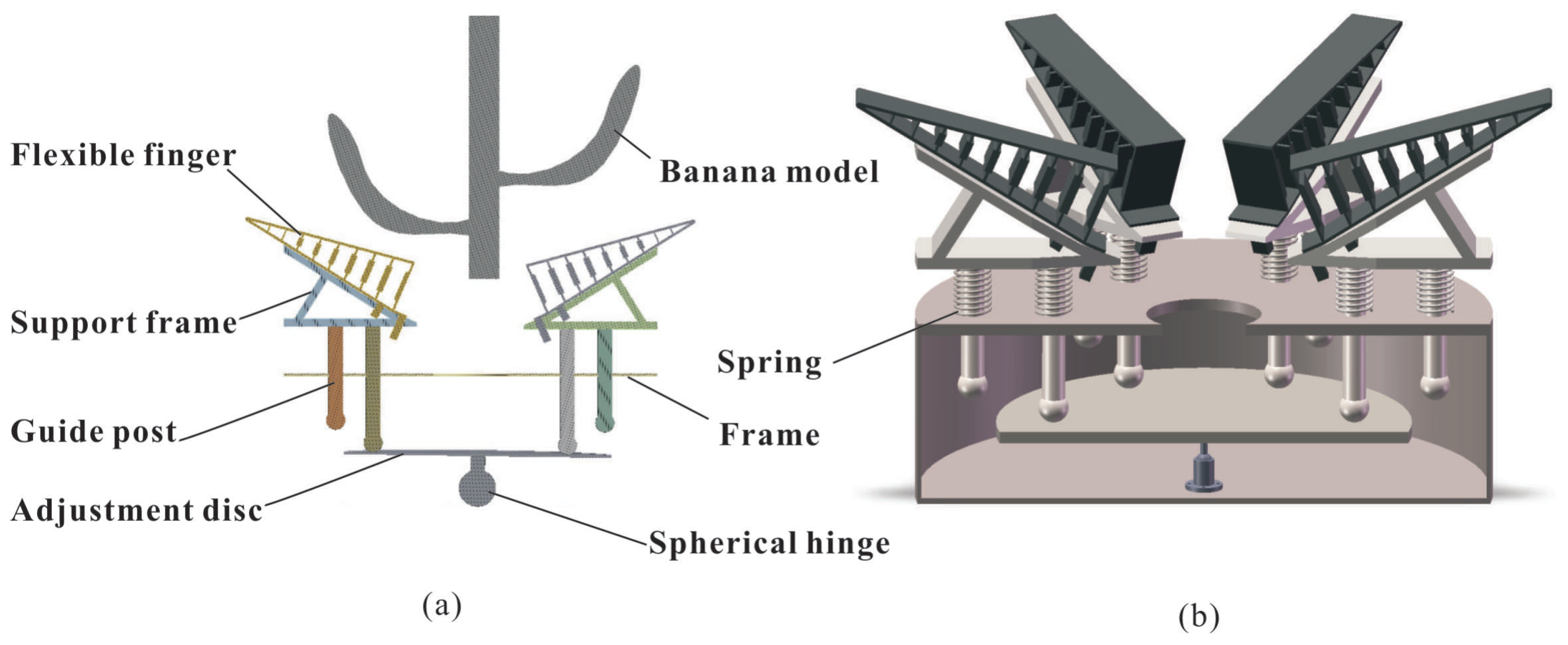
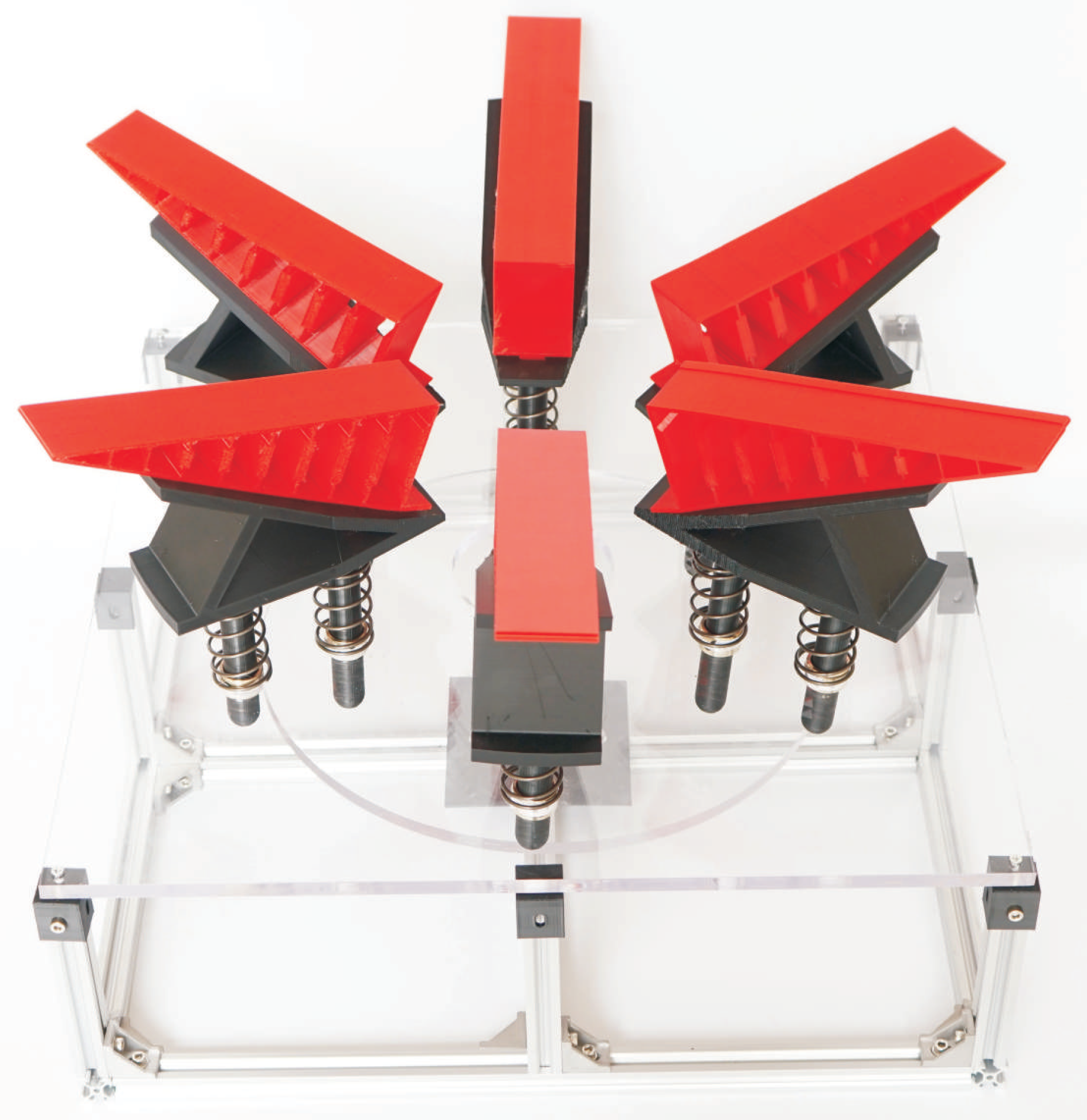
2.2. Structural Design of the Supporting Device
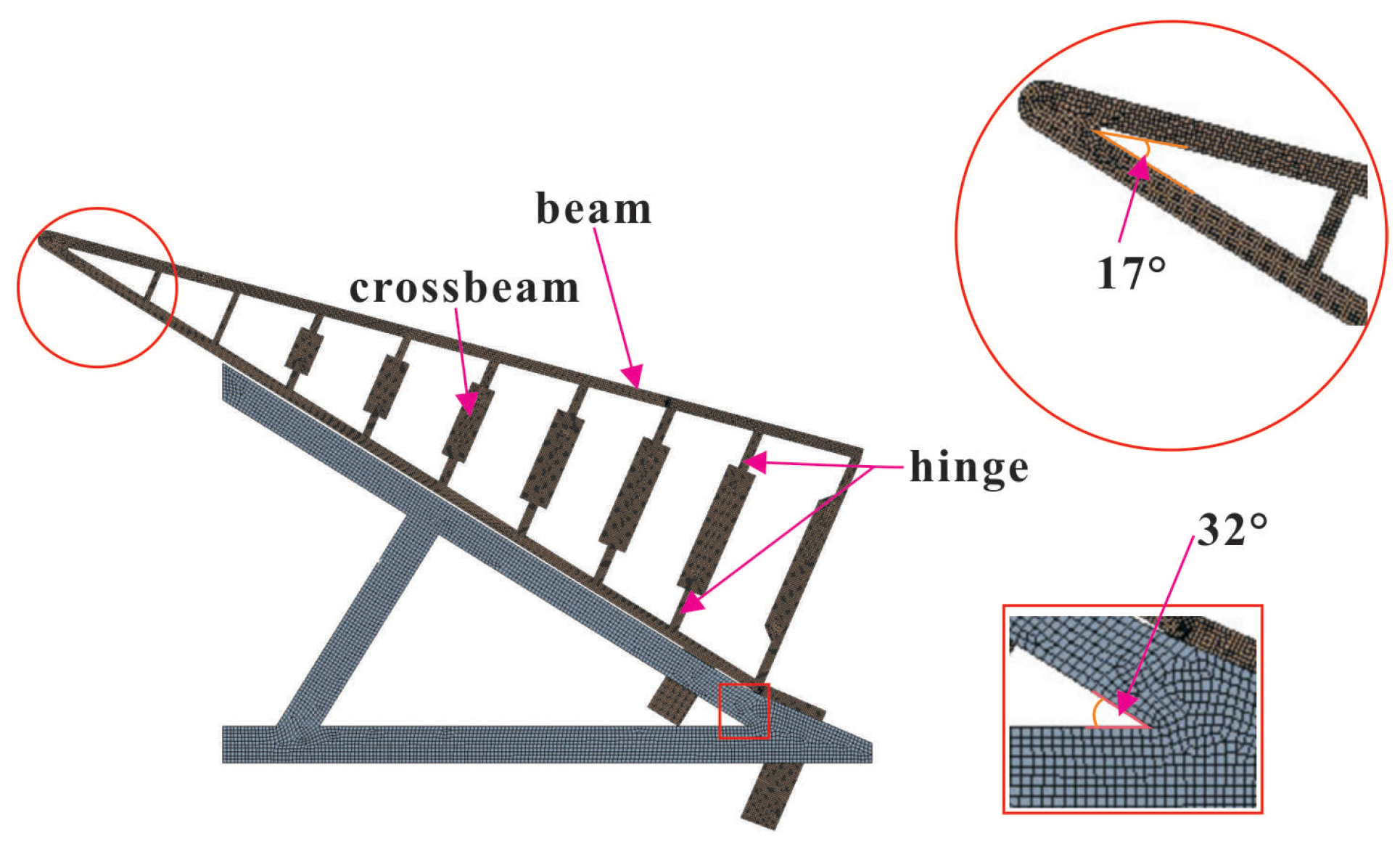
2.2.1. Design of the Flexible Contact Part
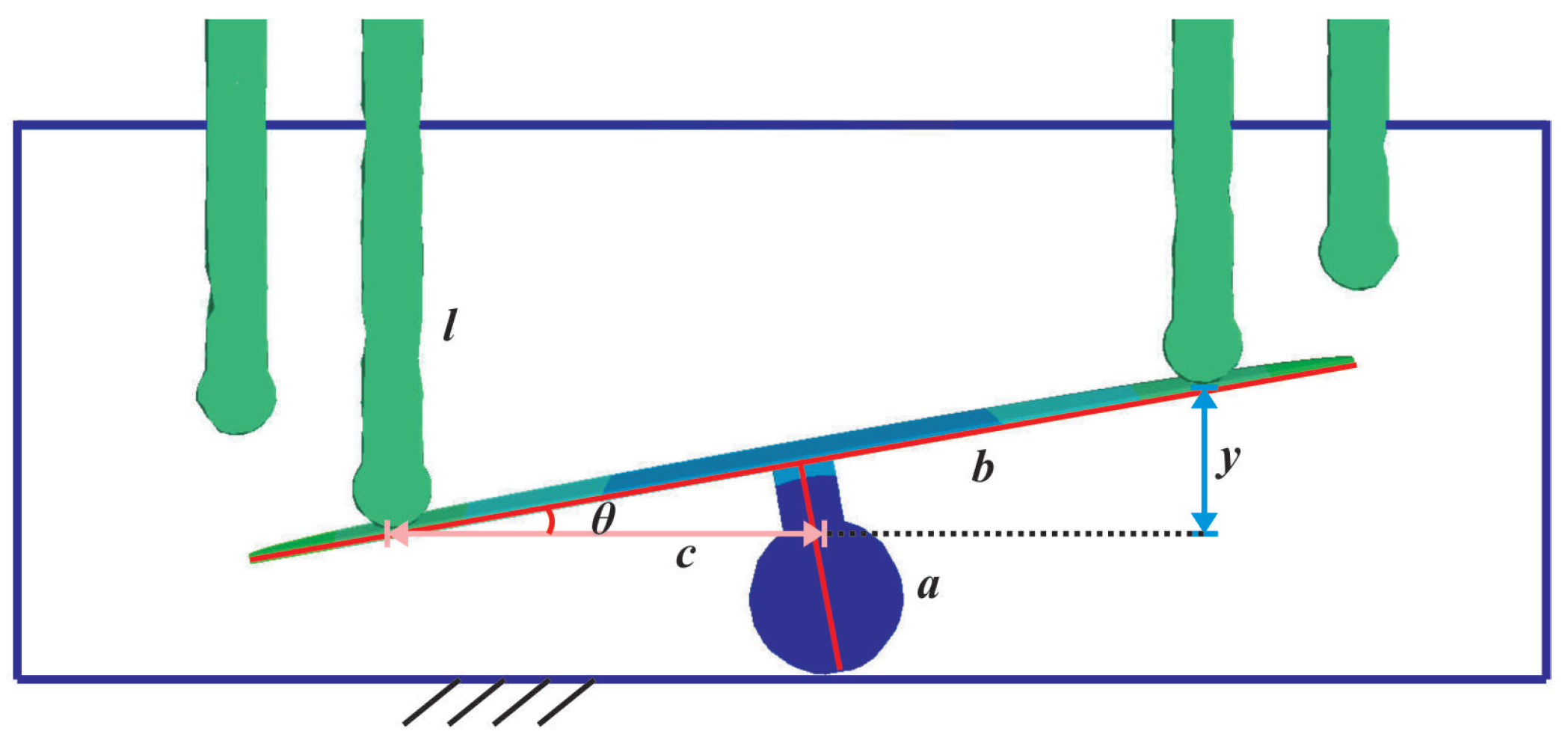
2.2.2. Design of the Height Difference Self-Adjusting Part
3. The Simulation Analysis
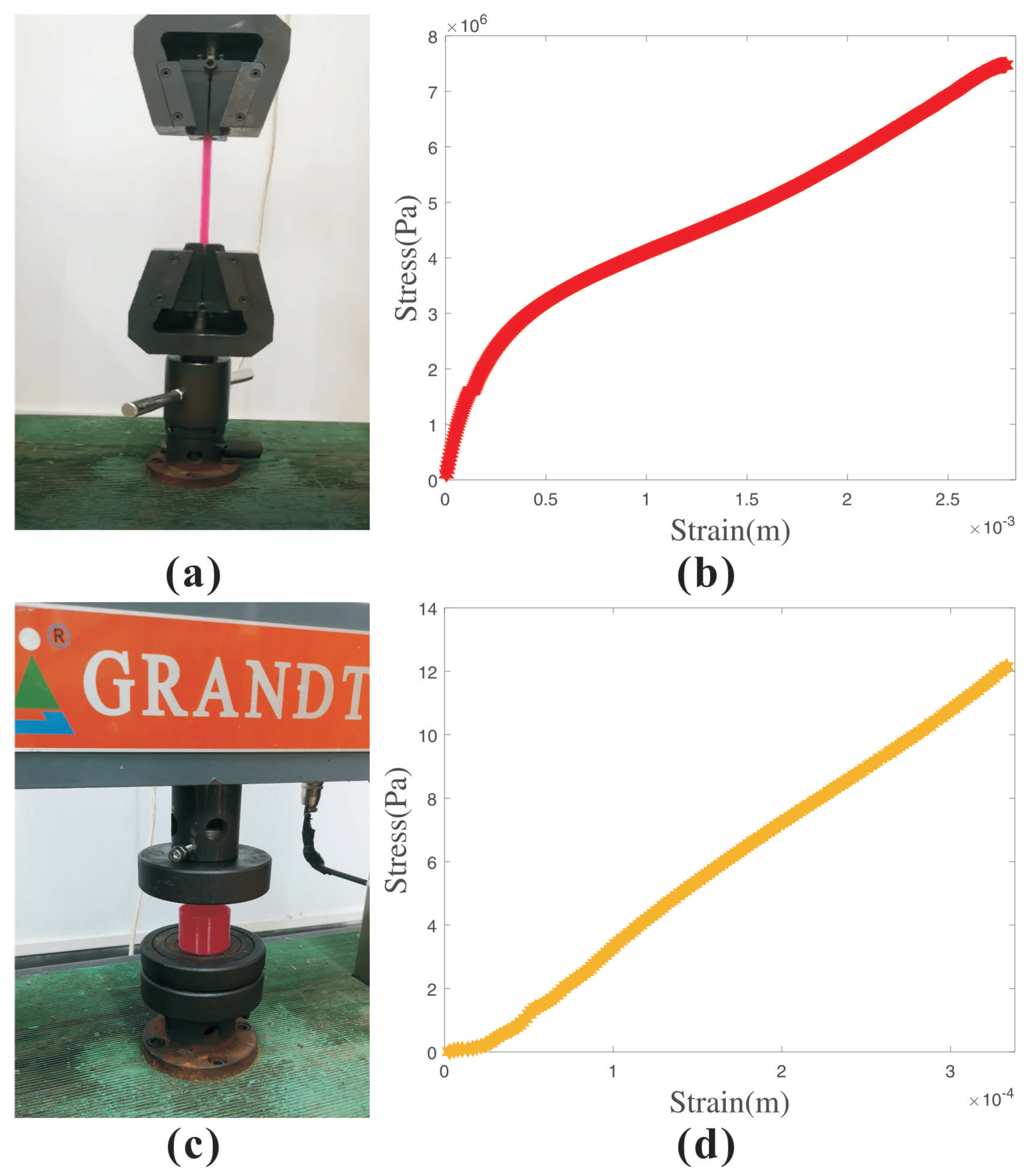
3.1. Parameter Fitting of the Flexible Material
3.2. Analysis of the Device Adaptability
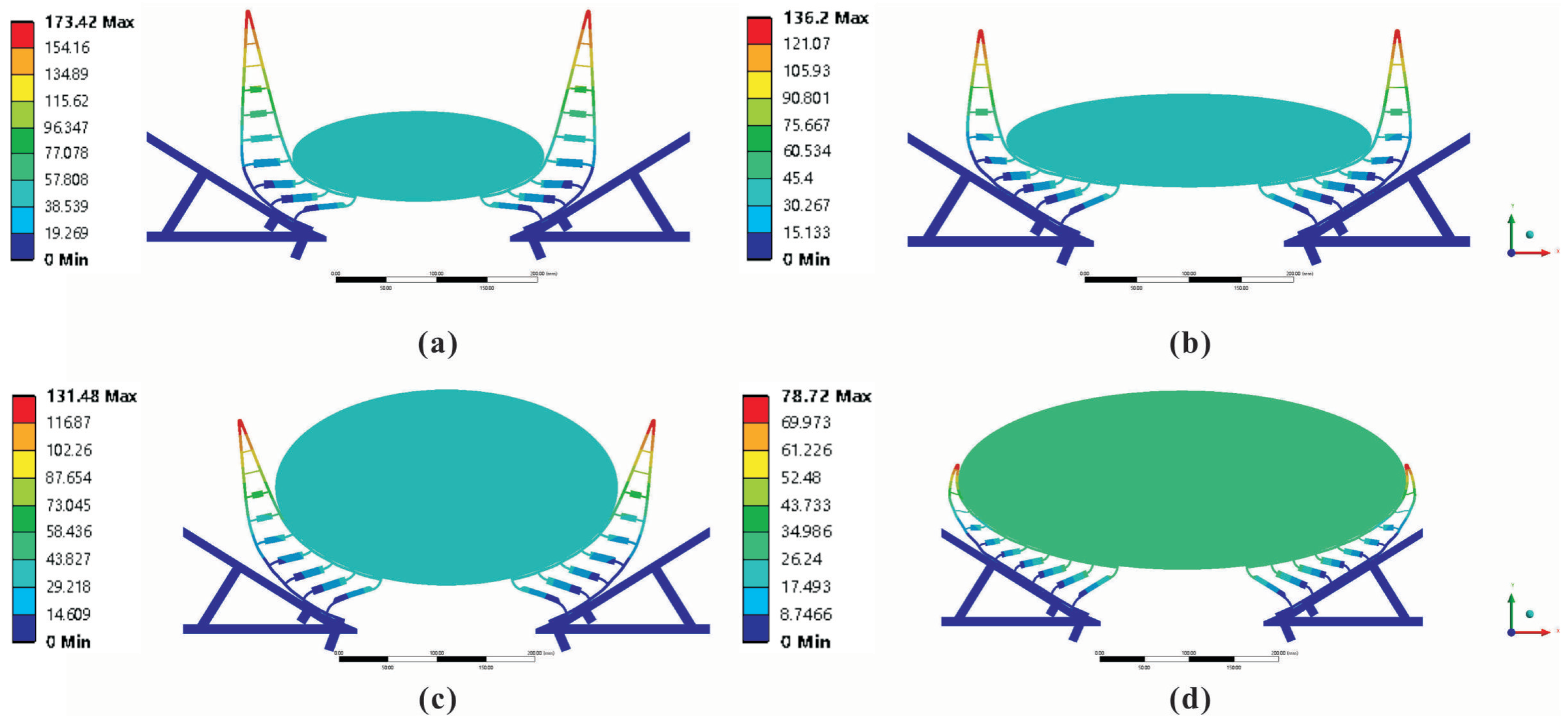
3.2.1. Shape Adaptability
3.2.2. Size Adaptability
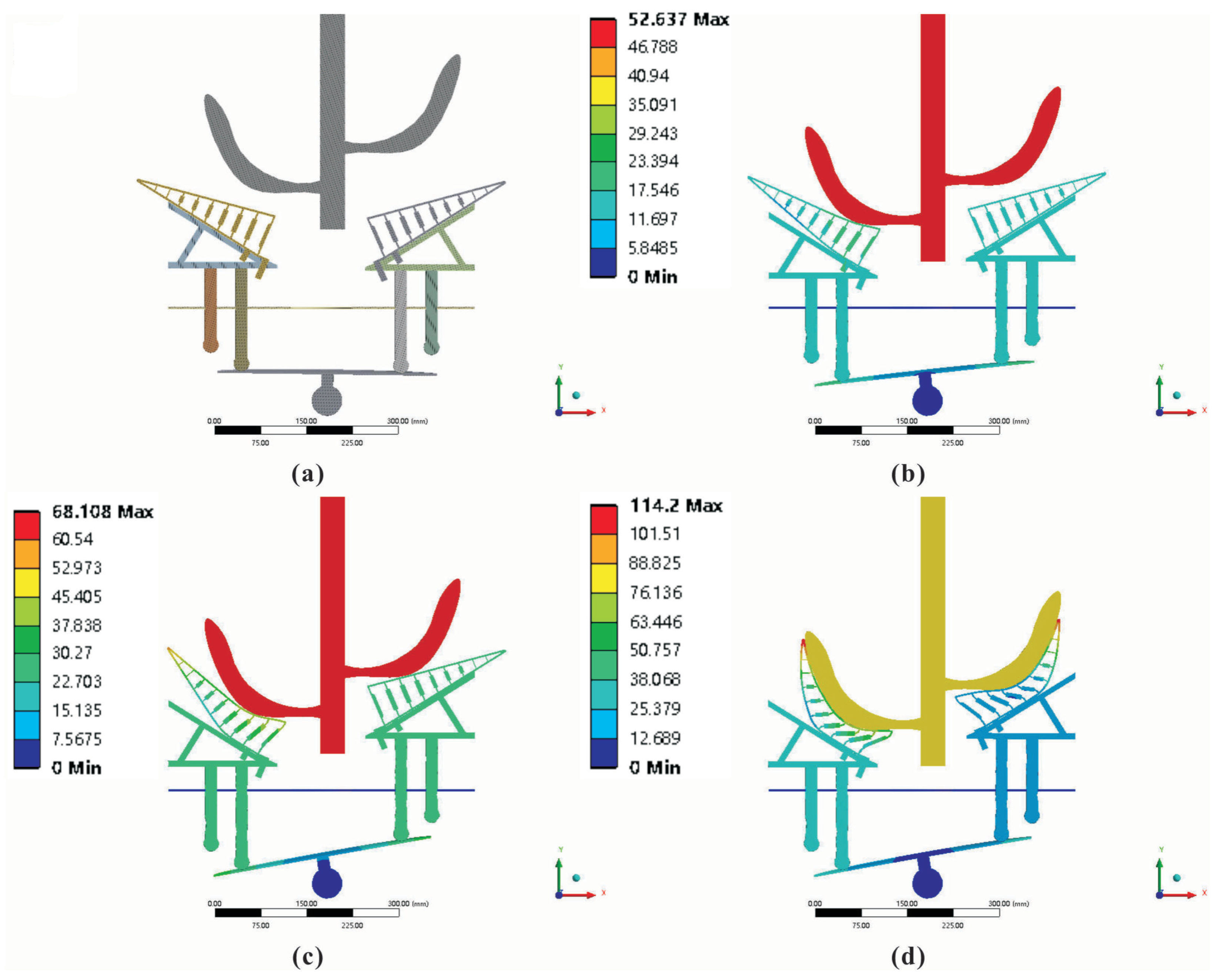
3.2.3. Height Difference Adaptability
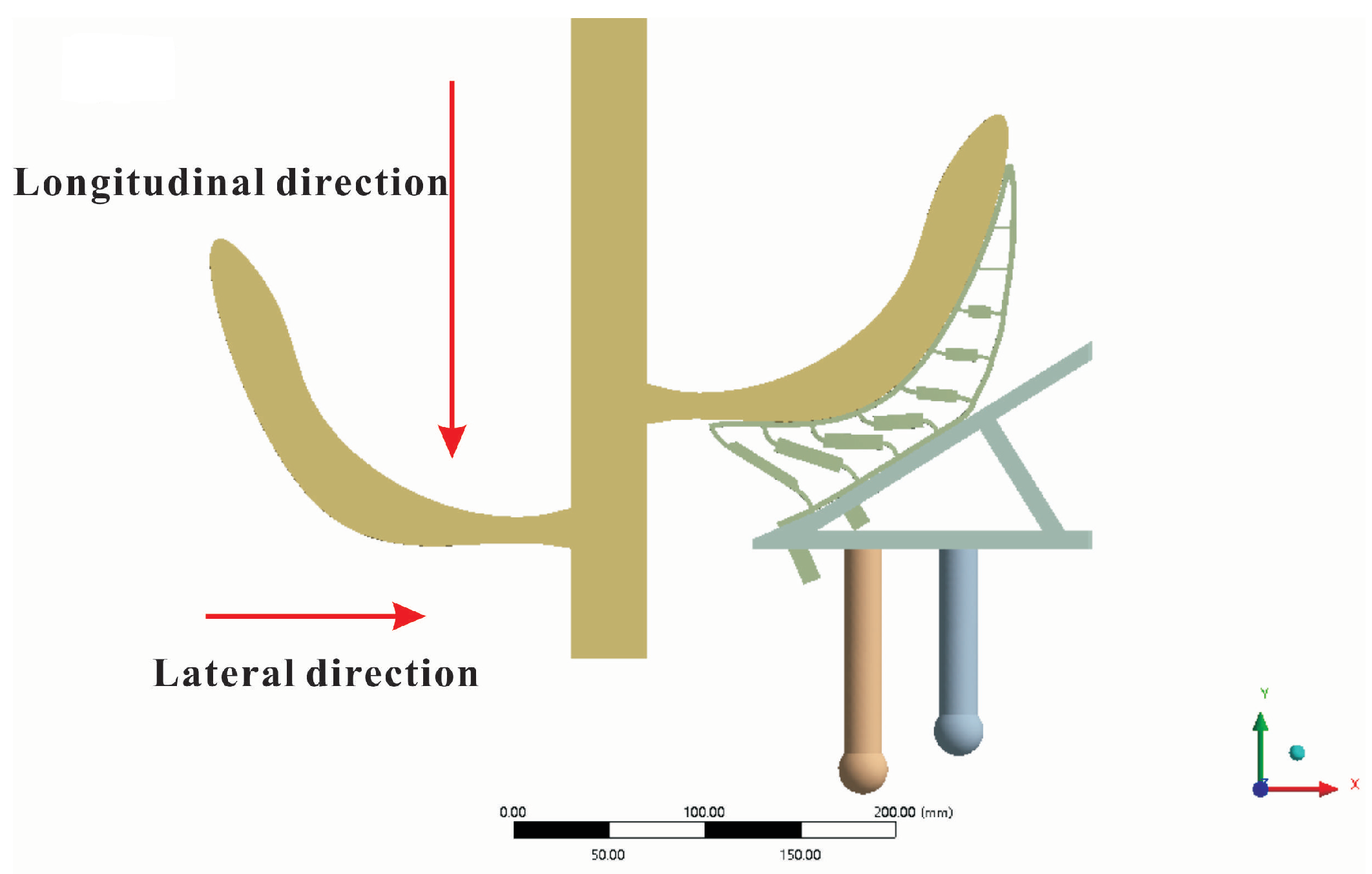
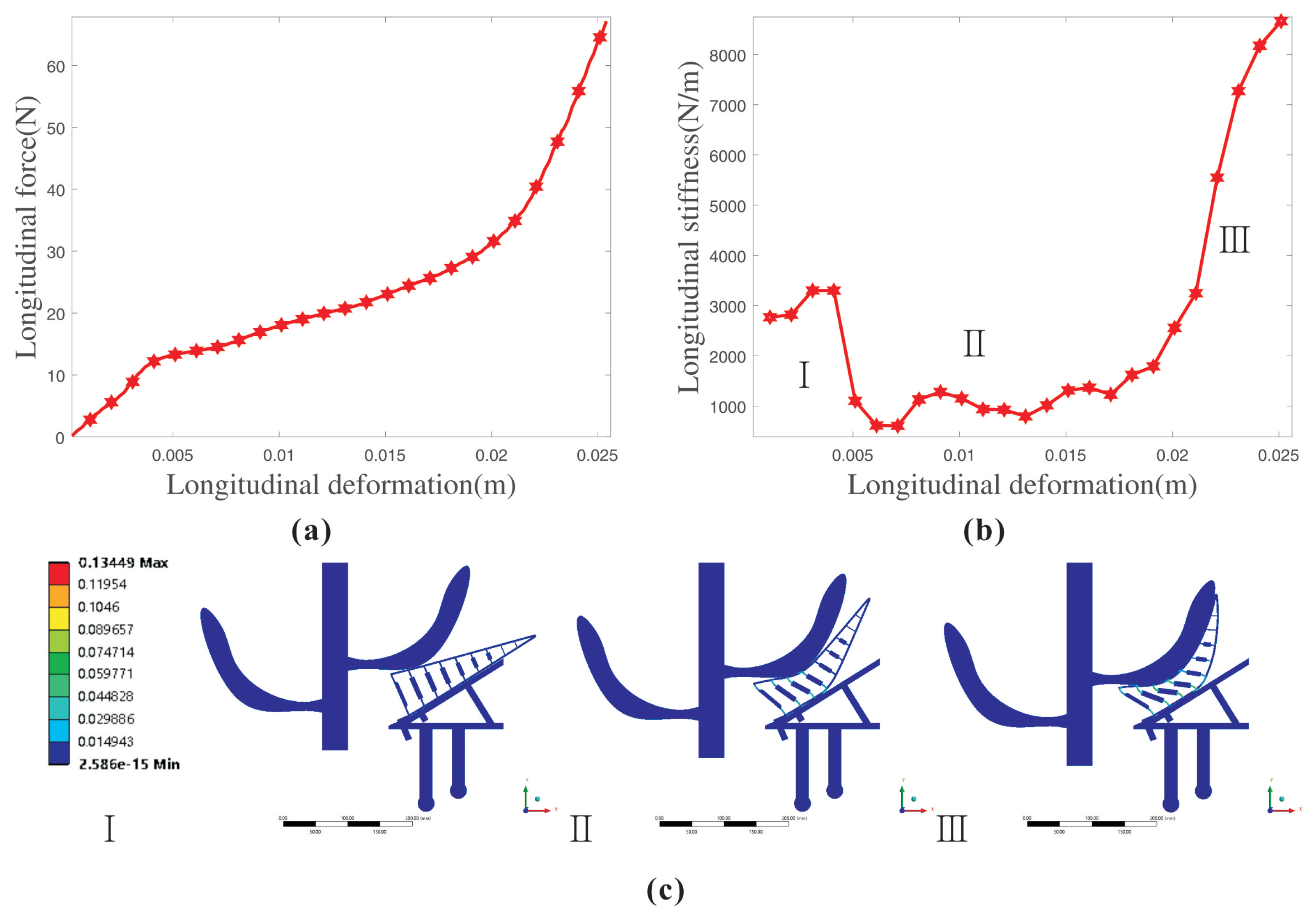
3.3. Analysis of the Mechanical Properties
3.3.1. Longitudinal Stiffness Analysis
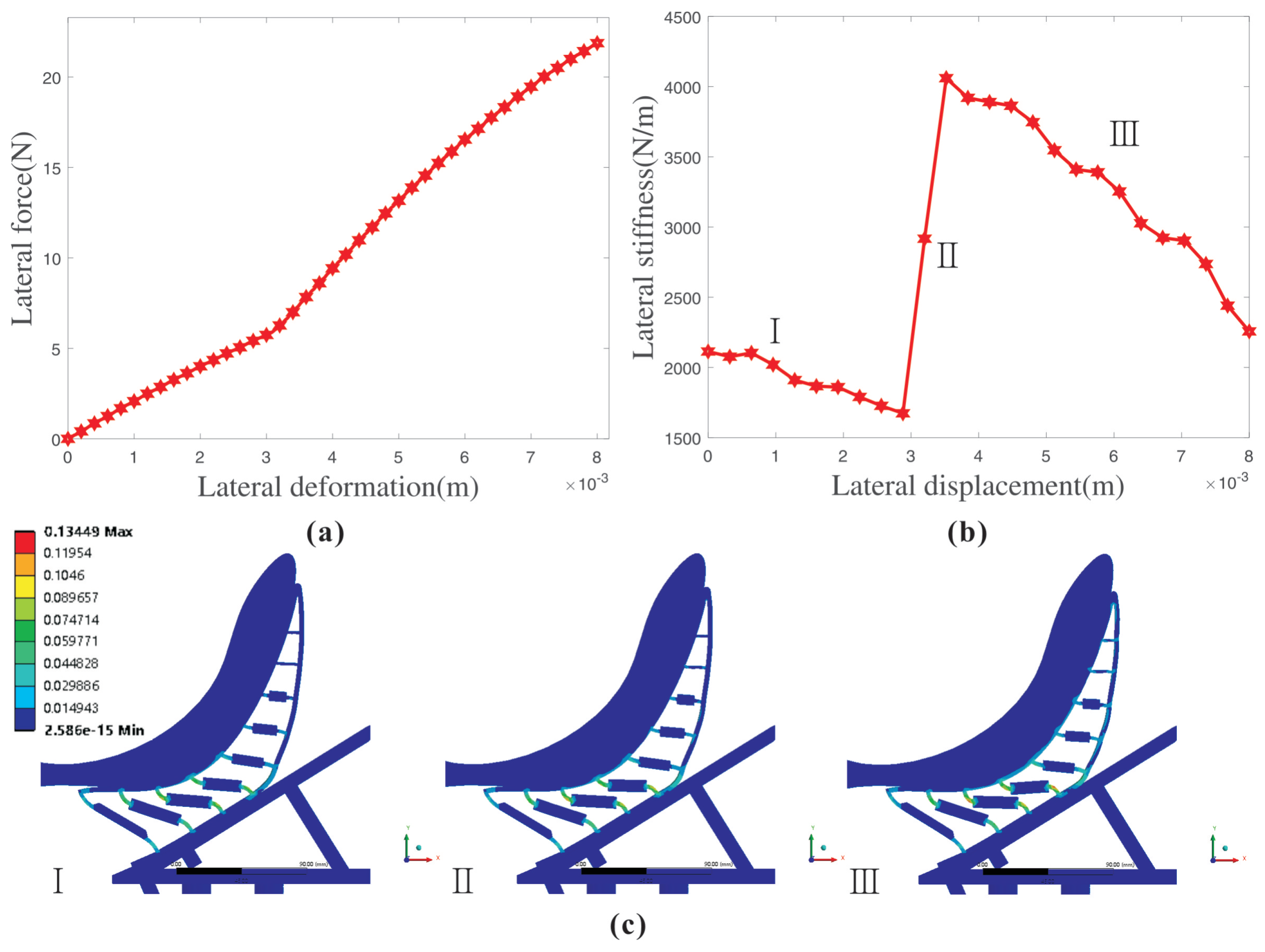
3.3.2. Lateral Stiffness Analysis
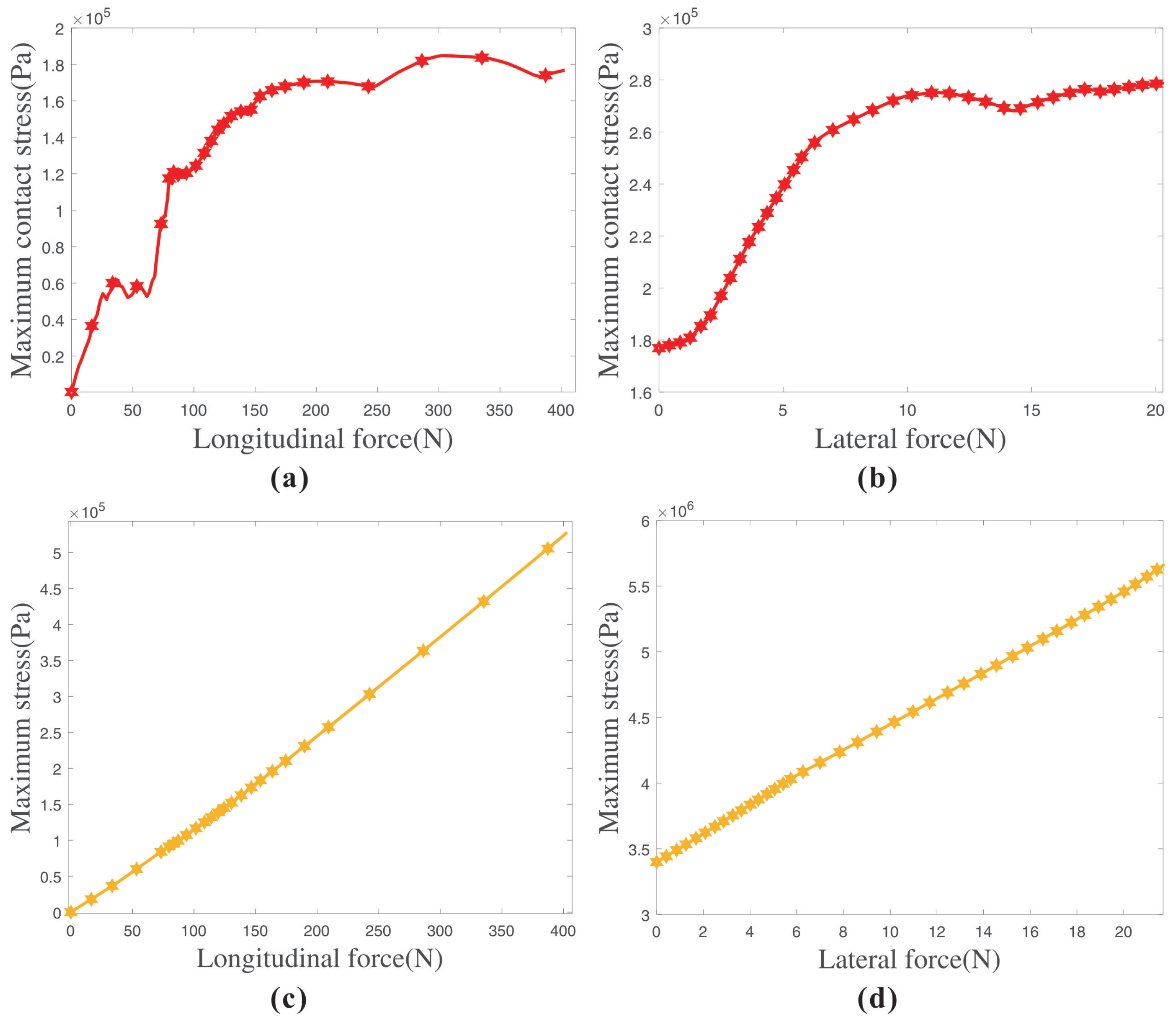
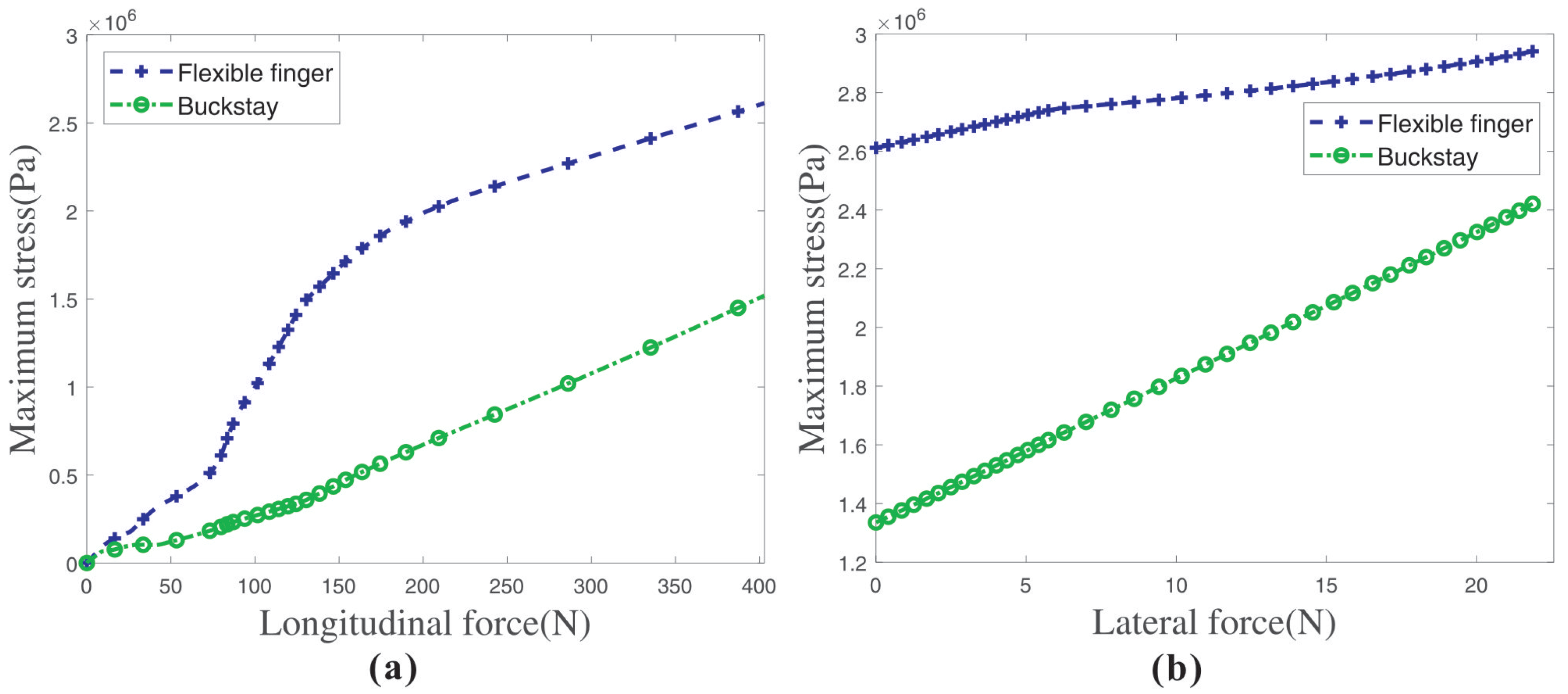
3.3.3. Resulting Stress on the Banana
3.3.4. Structure Stress of the Device
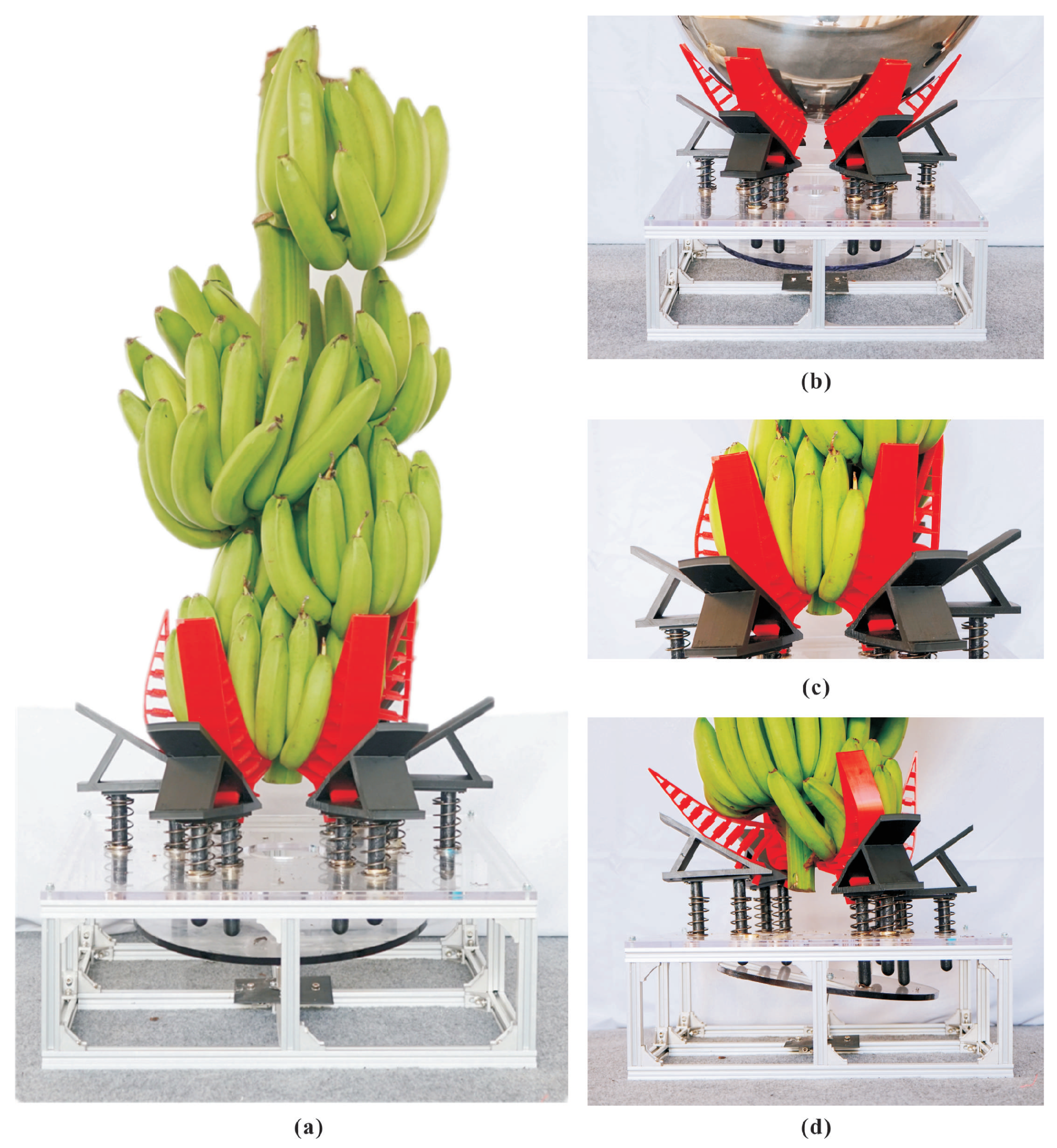
4. Prototype Test and Analysis of the Whole Device
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviation
| TPU | Thermoplastic Polyurethane |
References
- Zhang, F.; Guo, J.; Chang, X. Analysis and countermeasures of Fruit export structure in China. Agric. Sci. Technol. Manag. 2009, 28, 7–10. Available online: http://www.cqvip.com/qk/96532x/200904/31330274.html (accessed on 21 January 2022).
- Tang, Z. Clamping Test and Simulation Analysis of Banana Picking Manipulator. Master’s Thesis, South China Agricultural University, Guangdong, China, 2016. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=1016923453.nh&DbName=CMFD2017 (accessed on 21 January 2022).
- Su, J.; Liu, Y.; Wu, J. Research Status and Development Trend of Banana Picking Machinery. J. China Agric. Univ. 2019, 7. Available online: http://qikan.chaoxing.com/detail_38502727e7500f26171ea43bedc3268bd3eee3e521fe0f541921b0a3ea255101fc1cf1fbb4666ae61c70c17c04d85d2309b71323b08bba60c637daae09b09ed3d2513797d48392f57a83e1de13d21cff (accessed on 21 January 2022).
- Duan, J.; Lu, H.; Wang, W.; Wang, L.; Zhao, L. The current situation and development of fruit harvesting machinery. Agric. Sci. Guangdong Prov. 2012, 39, 189–192. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CJFD&dbname=CJFD2012&filename=GDNY201216060&uniplatform=NZKPT&v=WhNYQ5MxQtfuGQxV0jIQiyNT3F66DcsG4kgXrnLhbWY0buUpEb2fqr7zuOoF1pdC (accessed on 21 January 2022).
- Takeda, F.; Yang, W.Q.; Li, C.; Freivalds, A.; Sung, K.; Xu, R.; Hu, B.; Williamson, J.; Sargent, S. Applying new technologies to transform blueberry harvesting. Agronomy 2017, 7, 33. [Google Scholar] [CrossRef] [Green Version]
- Sargent, S.A.; Takeda, F.; Williamson, J.G.; Berry, A.D. Harvest of southern highbush blueberry with a modified, over-the-row mechanical harvester: Use of soft-catch surfaces to minimize impact bruising. Agronomy 2021, 11, 1412. [Google Scholar] [CrossRef]
- Kondo, N.; Yata, K.; Iida, M.; Shiigi, T.; Monta, M.; Kurita, M.; Omori, H. Development of an end-effector for a tomato cluster harvesting robot. Eng. Agric. Environ. Food 2010, 3, 20–24. Available online: https://www.jstage.jst.go.jp/article/eaef/3/1/3_1_20/_article (accessed on 21 January 2022). [CrossRef]
- Hayashi, S.; Shigematsu, K.; Yamamoto, S.; Kobayashi, K.; Kohno, Y.; Kamata, J.; Kurita, M. Evaluation of a strawberry-harvesting robot in a field test. Biosyst. Eng. 2010, 105, 160–171. Available online: http://gateway.isiknowledge.com/gateway/Gateway.cgi?GWVersion=2&SrcAuth=AegeanSoftware&SrcApp=NoteExpress&DestLinkType=FullRecord&DestApp=WOS&KeyUT=000276287800002 (accessed on 21 January 2022). [CrossRef]
- Hayashi, S.; Yamamoto, S.; Tsubota, S.; Ochiai, Y.; Kobayashi, K.; Kamata, J.; Kurita, M.; Inazumi, H.; Peter, R. Automation technologies for strawberry harvesting and packing operations in japan 1. J. Berry Res. 2014, 4, 19–27. Available online: http://gateway.isiknowledge.com/gateway/Gateway.cgi?GWVersion=2&SrcAuth=AegeanSoftware&SrcApp=NoteExpress&DestLinkType=FullRecord&DestApp=WOS&KeyUT=000219924600003 (accessed on 21 January 2022). [CrossRef] [Green Version]
- Umeda, M.; Kubota, S.; Iida, M. Development of “STORK”, a watermelon-harvesting robot. Artif. Life Robot. 1999, 3, 143–147. Available online: https://go.exlibris.link/QMBBzFpp (accessed on 21 January 2022). [CrossRef]
- Cho, S.; Chang, S.; Kim, Y.; An, K. Development of a three-degrees-of-freedom robot for harvesting lettuce using machine vision and fuzzy logic control. Biosyst. Eng. 2002, 82, 143–149. Available online: https://pubag.nal.usda.gov/catalog/670025 (accessed on 21 January 2022). [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. Available online: https://www.sciencedirect.com/science/article/pii/S0168169920311030 (accessed on 21 January 2022). [CrossRef]
- Liu, Y. Design and Research of Anti-Overturning Banana Picking Machine. Master’s Thesis, Fujian Agriculture and Forestry University, Fujian, China, 2020. Available online: http://www.wanfangdata.com.cn:443/details/detail.do?_type=degree&id=D02152037 (accessed on 21 January 2022).
- Xiao, M. Banana picking machine. World Agric. 1986, 7, 50. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=SJNY198607021&DbName=CJFQ1986 (accessed on 21 January 2022).
- Duan, J.; Yi, W.; Wang, H.; Zhao, L.; Wang, Y.; Yang, Z. Design and Test of the Clamping Mechanism for Banana Bunches. J. South China Agric. Univ. 2021, 42, 116–123. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=HNNB202102016&DbName=CJFQ2021 (accessed on 21 January 2022).
- Duan, J.; Yi, W.; Yang, Z.; Guo, J.; Liu, E.; Jiang, T.; Li, Y.; Xing, K.; Liu, Y.; Wang, Y. Semi-Automatic Banana Picking and Harvesting Machine. 2021. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=CN112930860A&DbName=SCPD2021 (accessed on 21 January 2022).
- Fu, L.; Feng, Y.; Wu, J.; Liu, Z.; Gao, F.; Majeed, Y.; Al-Mallahi, A.; Zhang, Q.; Li, R.; Cui, Y. Fast and accurate detection of kiwifruit in orchard using improved YOLOv3-tiny model. Precis. Agric. 2021, 22, 754–776. [Google Scholar] [CrossRef]
- Lin, G.; Zhu, L.; Li, J.; Zou, X.; Tang, Y. Collision-free path planning for a guava-harvesting robot based on recurrent deep reinforcement learning. Comput. Electron. Agric. 2021, 188, 106350. [Google Scholar] [CrossRef]
- He, L.; Schupp, J. Sensing and automation in pruning of apple trees: A review. Agronomy 2018, 8, 211. [Google Scholar] [CrossRef] [Green Version]
- Langowski, J.; Sharma, P.; Shoushtari, A.L. In the soft grip of nature. Sci. Robot. 2020, 5, eabd9120. [Google Scholar] [CrossRef] [PubMed]
- Shan, X.; Birglen, L. Modeling and analysis of soft robotic fingers using the fin ray effect. Int. J. Robot. Res. 2020, 39, 1686–1705. [Google Scholar] [CrossRef]
- Jin, M.; Zhu, B.; Mo, J.; Yang, Z.; Zhang, X.; Howell, L.L. A CPRBM-based method for large-deflection analysis of contact-aided compliant mechanisms considering beam-to-beam contacts. Mech. Mach. Theory 2020, 145, 103700. [Google Scholar] [CrossRef]
- Bilancia, P.; Berselli, G.; Magleby, S.; Howell, L. On the modeling of a contact-aided cross-axis flexural pivot. Mech. Mach. Theory 2020, 143, 103618. [Google Scholar] [CrossRef]
- Crooks, W.; Rozen-Levy, S.; Trimmer, B.; Rogers, C.; Messner, W. Passive gripper inspired by Manduca sexta and the Fin Ray® Effect. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417721155. [Google Scholar] [CrossRef] [Green Version]
- Luo, L.; Liu, W.; Lu, Q.; Wang, J.; Wen, W.; Yan, D.; Tang, Y. Grape Berry Detection and Size Measurement Based on Edge Image Processing and Geometric Morphology. Machines 2021, 9, 233. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, H.; Xie, H.; Duan, J.; Jin, M.; Fu, H.; Guo, J.; Xu, Z.; Jiang, T.; Yang, Z. Effects of morphological and anatomical characteristics of banana crown vascular bundles on cutting mechanical properties using multiple imaging methods. Agronomy 2020, 10, 1199. [Google Scholar] [CrossRef]
- Yang, T.; Xv, Z.; Ji, Y.; Wang, Z. Design of an adaptive manipulator gripper based on fin-shaped effect. Jiangsu Sci. Technol. Inf. 2020, 26, 49–55. Available online: http://qikan.chaoxing.com/detail_38502727e7500f26bcf04c1ea6dd522199a0bacbd7c5862c1921b0a3ea255101fc1cf1fbb4666ae6e9292cb922bb1f23917ff3eeb9aced42a42ccbcd8d87021e6524f2067d7293d16e7142add9862a7b (accessed on 21 January 2022).
- Gao, G.; Dong, Z.; Sun, X.; Wang, H. Development and experimental research of a flexible manipulator based on 3D printing. Smart Agric. 2019, 1, 85. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=ZHNY201901012&DbName=CJFQ2019 (accessed on 21 January 2022).
- Jin, M.; Yang, Z.; Ynchausti, C.; Zhu, B.; Zhang, X.; Howell, L.L. Large-deflection analysis of general beams in contact-aided compliant mechanisms using chained pseudo-rigid-body model. J. Mech. Robot. 2020, 12, 031005. [Google Scholar] [CrossRef]
- Kumar, P.; Sauer, R.A.; Saxena, A. On topology optimization of large deformation contact-aided shape morphing compliant mechanisms. Mech. Mach. Theory 2021, 156, 104135. [Google Scholar] [CrossRef]
- Verotti, M. A pseudo-rigid body model based on finite displacements and strain energy. Mech. Mach. Theory 2020, 149, 103811. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Z.; Ma, X. Study on Parameter Characteristics of Rubber Mooney-rivlin model. Noise Vib. Control 2018, 38, 427–430. Available online: http://www.wanfangdata.com.cn:443/details/detail.do?_type=perio&id=zsyzdkz2018z1092 (accessed on 21 January 2022).
- Zhang, Q.; Shi, J.; Suo, S.; Guo, G. Finite element analysis of rubber material based on Mooney–Rivlin model and Yeoh model. Synth. Rubber Ind. 2020, 6, 468–471. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=HCXF202006008&DbName=CJFQ2020 (accessed on 21 January 2022).
- Nelson, C.A.; Nouaille, L.; Poisson, G. A redundant rehabilitation robot with a variable stiffness mechanism. Mech. Mach. Theory 2020, 150, 103862. [Google Scholar] [CrossRef]
- Jin, M.; Zhang, X.; Yang, Z.; Zhu, B. Jacobian-based topology optimization method using an improved stiffness evaluation. J. Mech. Des. 2018, 140, 011402. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z. Study on Cutting Characteristics and Falling Process of Banana Comb Handle. Master’s Thesis, South China Agricultural University, Guangdong, China, 2017. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=1018807884.nh&DbName=CMFD2020 (accessed on 21 January 2022).
- Fu, H.; Liu, E.; Yang, Z.; Yang, J.; Zhang, H.; Xie, B.; Du, W.; Duan, J. Evaluation of Green Banana’s Impact Damage Sensitivity Based on Swing Impact Test. J. South China Agric. Univ. 2021, 6, 1–15. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CJFD&dbname=CJFDAUTO&filename=HNNB202106014&uniplatform=NZKPT&v=FYEFMFs1jcg4rSFQx9dZ-msxPgTQlDhJiJYIJ47zNlcJJxrzjU4lIdumXNwc4PDA (accessed on 21 January 2022).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Banana bunch weight | 25–40 kg |
| Banana bunch length | 840–1000 mm |
| Banana bunch diameter | 300–450 mm |
| Banana stalk diameter | 40–80 mm |
| Banana hands height difference | 40–80 mm |
| Banana hands angle difference | 120–180 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, B.; Jin, M.; Duan, J.; Yang, Z.; Xu, S.; Luo, Y.; Wang, H. Design and Analysis of a Flexible Adaptive Supporting Device for Banana Harvest. Agronomy 2022, 12, 593. https://doi.org/10.3390/agronomy12030593
Xie B, Jin M, Duan J, Yang Z, Xu S, Luo Y, Wang H. Design and Analysis of a Flexible Adaptive Supporting Device for Banana Harvest. Agronomy. 2022; 12(3):593. https://doi.org/10.3390/agronomy12030593
Chicago/Turabian StyleXie, Bowei, Mohui Jin, Jieli Duan, Zhou Yang, Shengquan Xu, Yukang Luo, and Haojie Wang. 2022. "Design and Analysis of a Flexible Adaptive Supporting Device for Banana Harvest" Agronomy 12, no. 3: 593. https://doi.org/10.3390/agronomy12030593
APA StyleXie, B., Jin, M., Duan, J., Yang, Z., Xu, S., Luo, Y., & Wang, H. (2022). Design and Analysis of a Flexible Adaptive Supporting Device for Banana Harvest. Agronomy, 12(3), 593. https://doi.org/10.3390/agronomy12030593