
Segmentation of Individual Leaves of Field Grown Sugar Beet Plant Based on 3D Point Cloud


Abstract
:1. Introduction
2. Materials and Methods
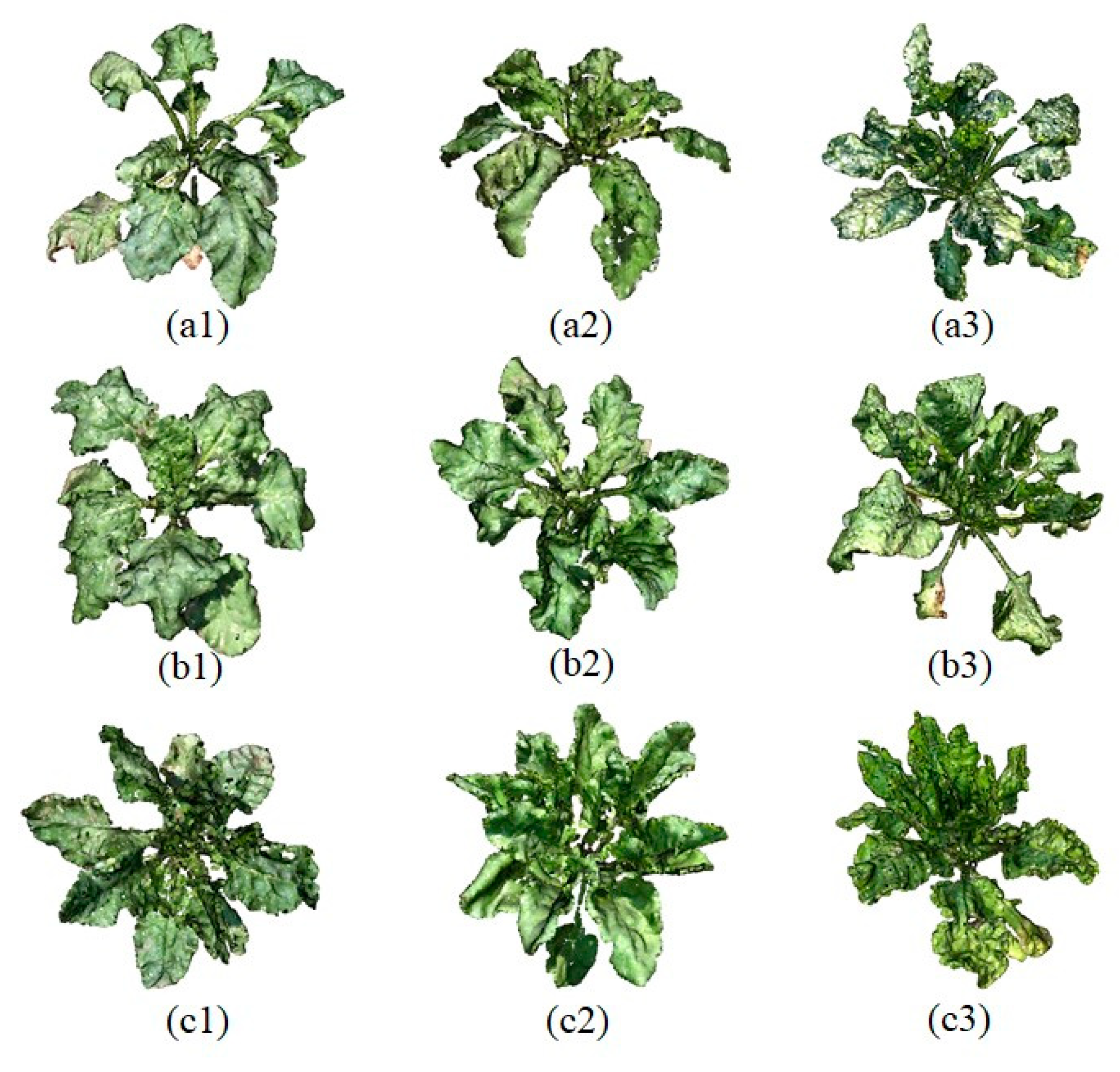
2.1. Field Trials and Data Acquisition
2.2. 3D Point Cloud Reconstruction
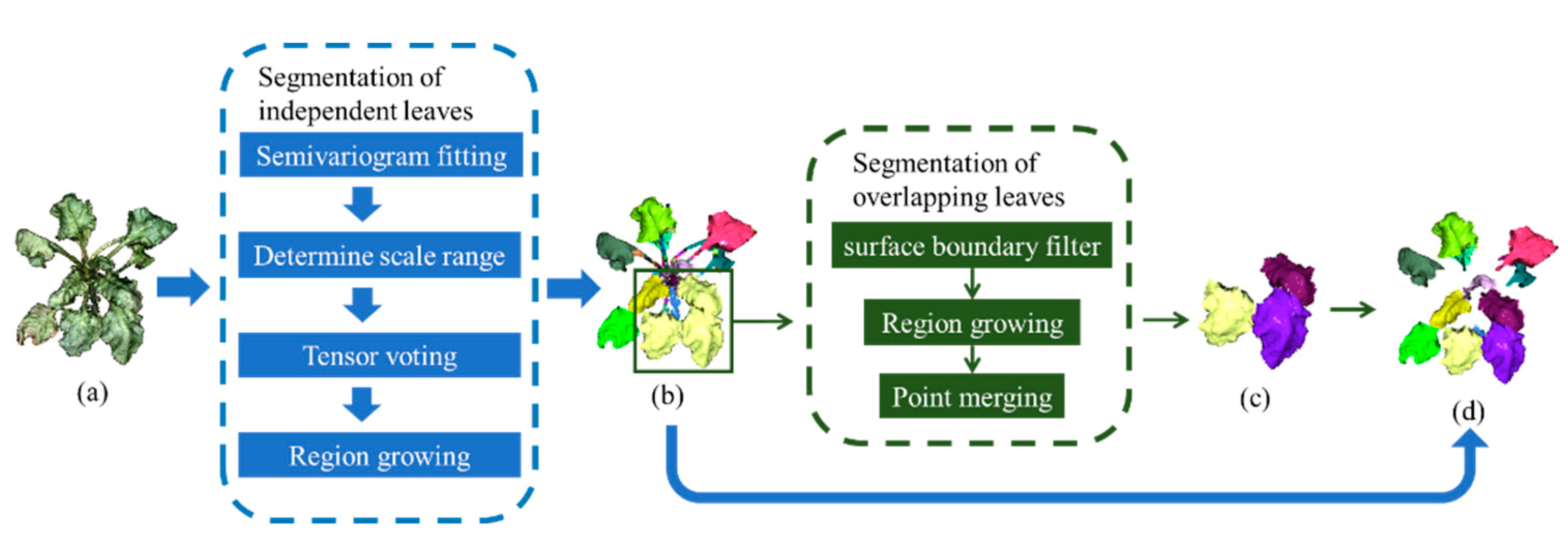
2.3. Point Cloud Segmentation of Individual Leaves
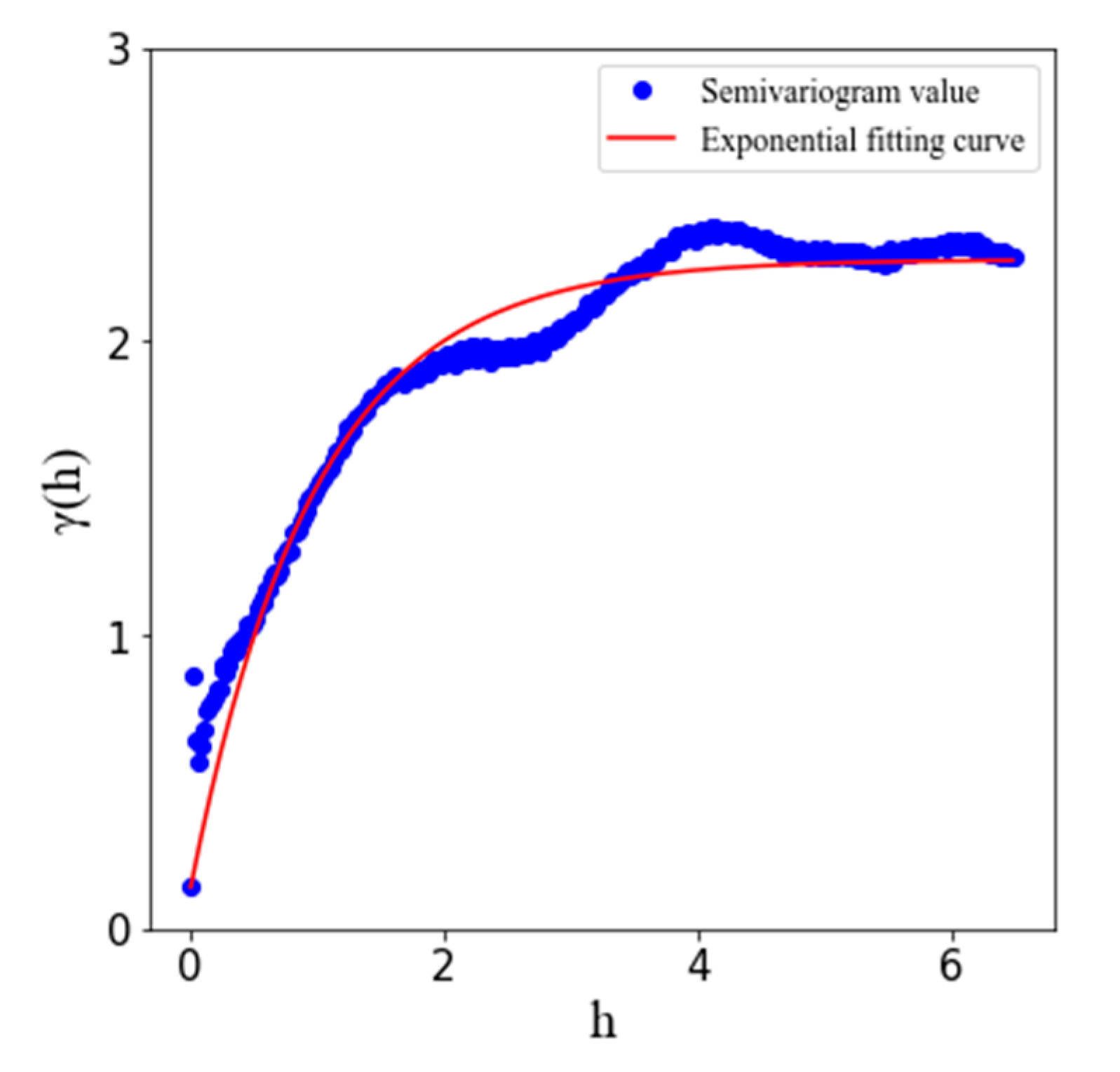
2.3.1. Point Cloud Segmentation of Independent Leaves
2.3.2. Point Cloud Segmentation of Overlapping Leaves
2.4. Performance Evaluation of Phenotypic Data Extraction
3. Results
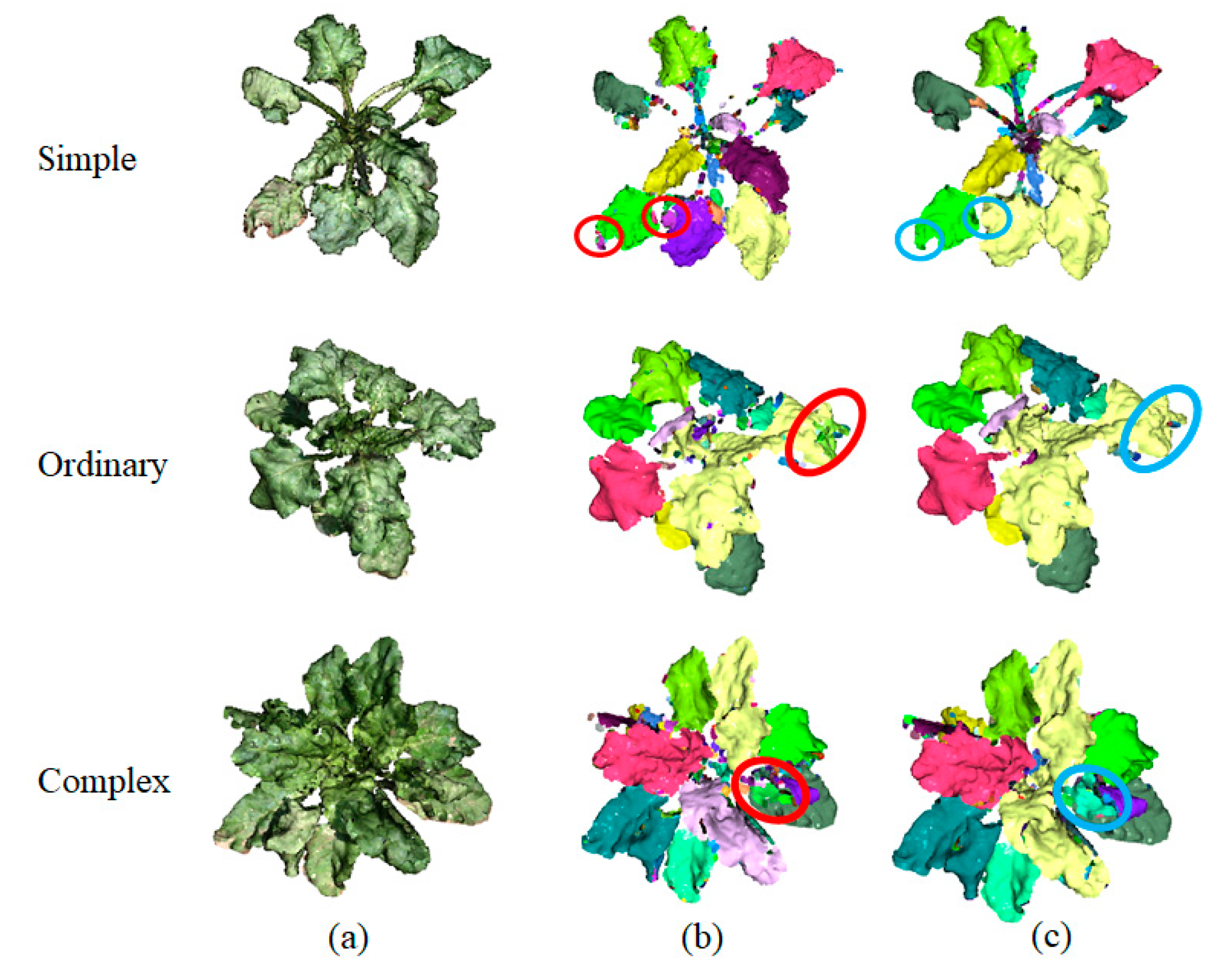
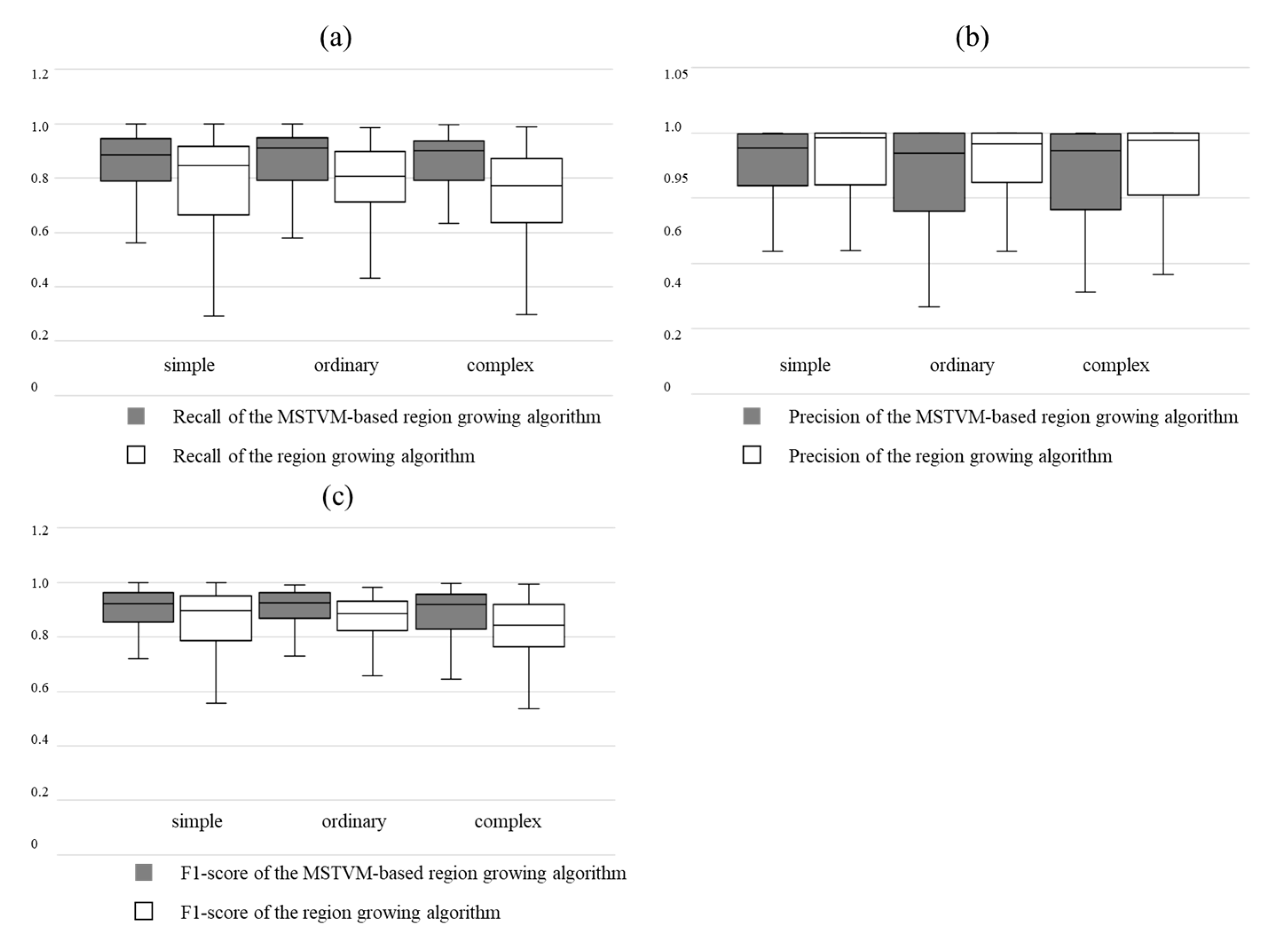
3.1. Segmentation of Individual Leaves with MSTVM-Based Region-Growing Algorithm
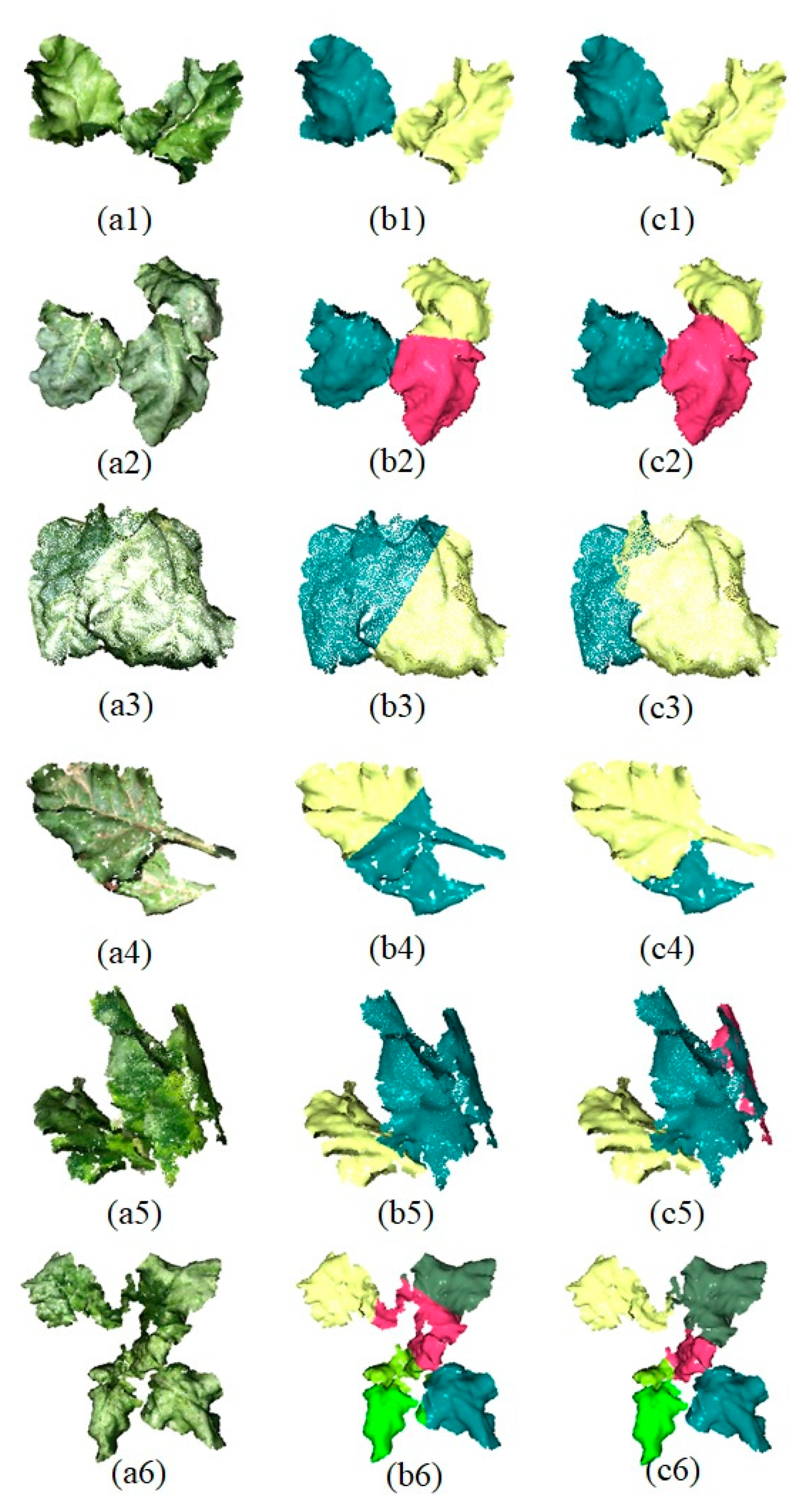
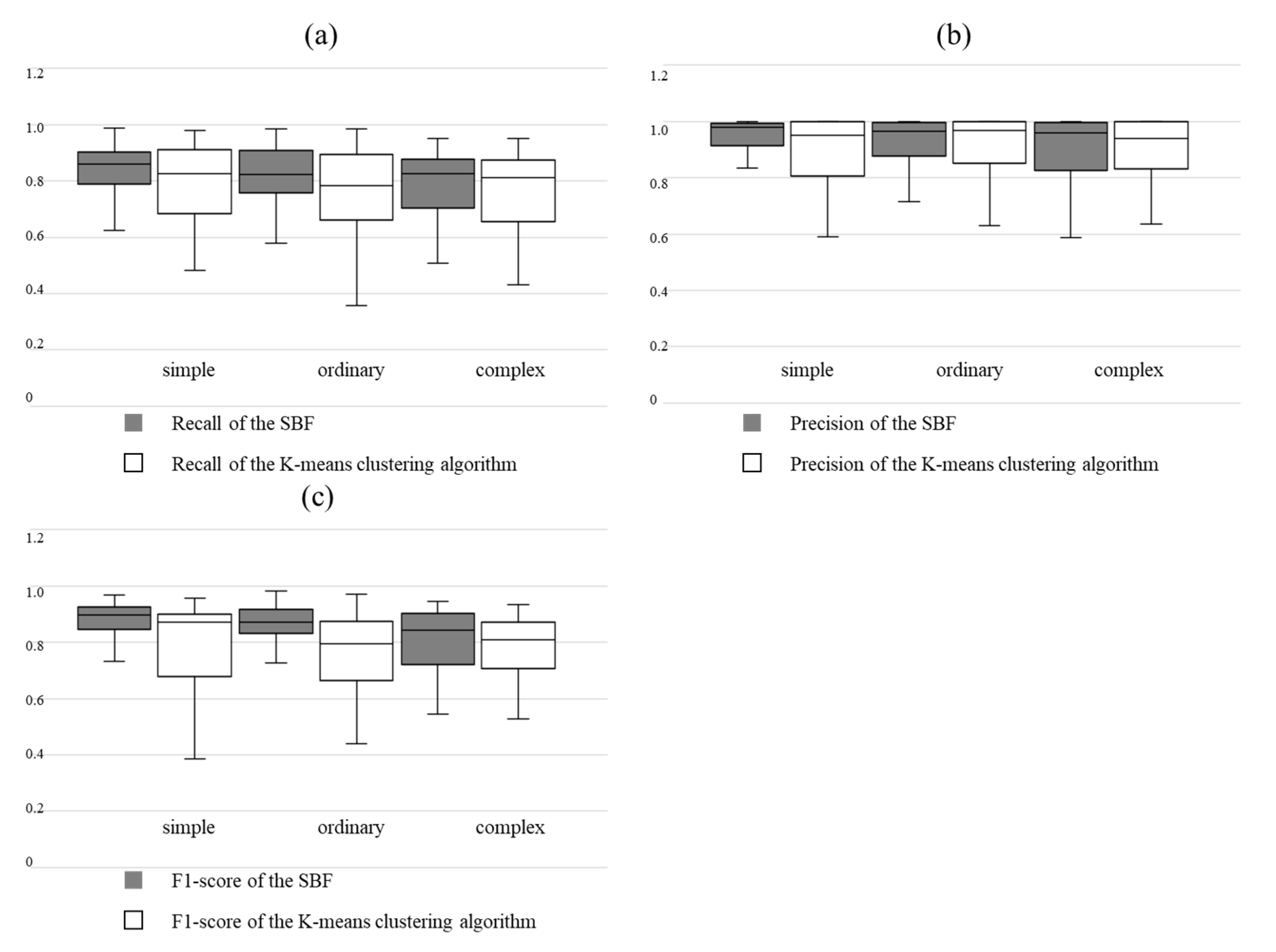
3.2. Further Segmentations for Overlapping Leaves
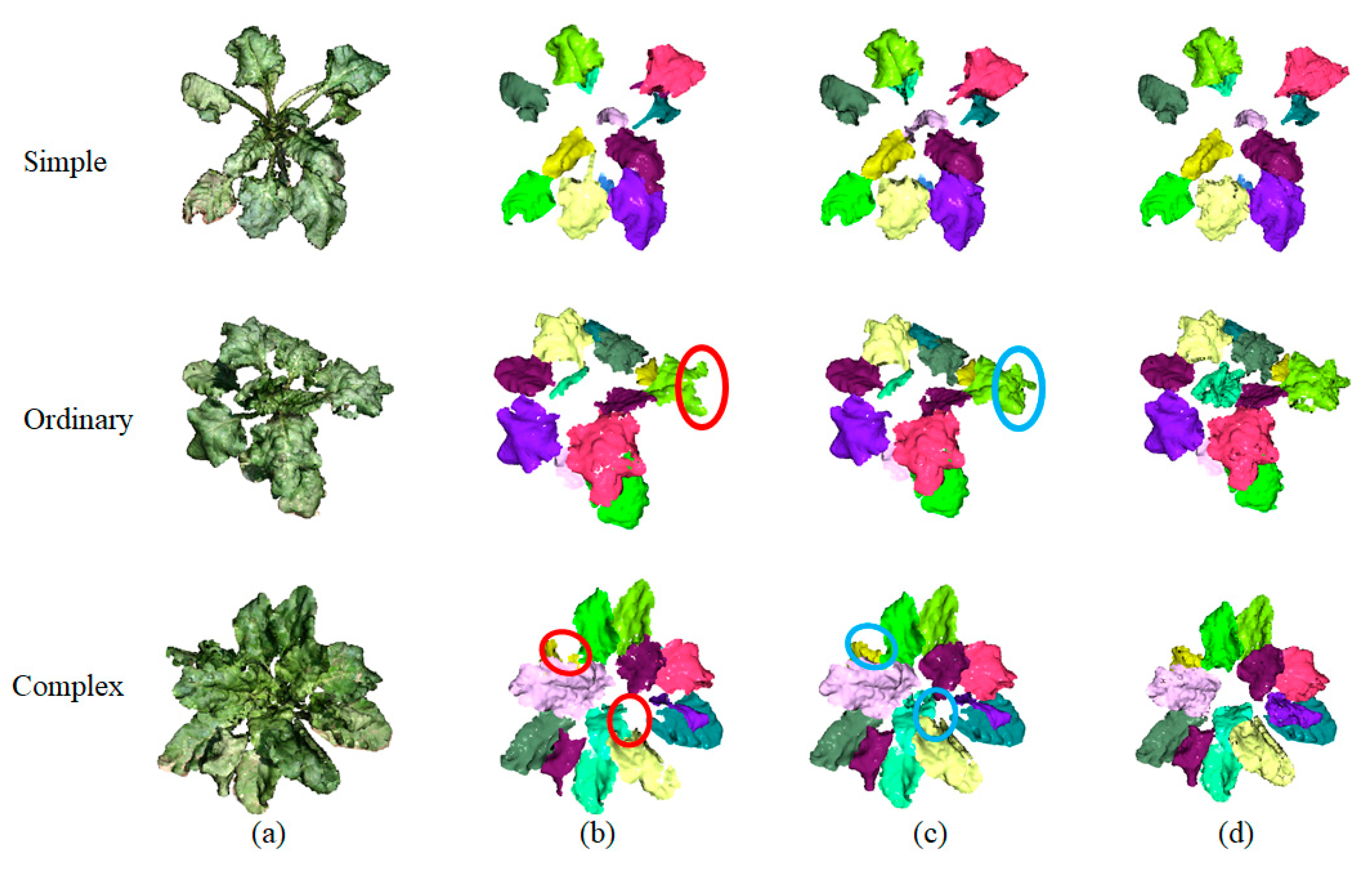
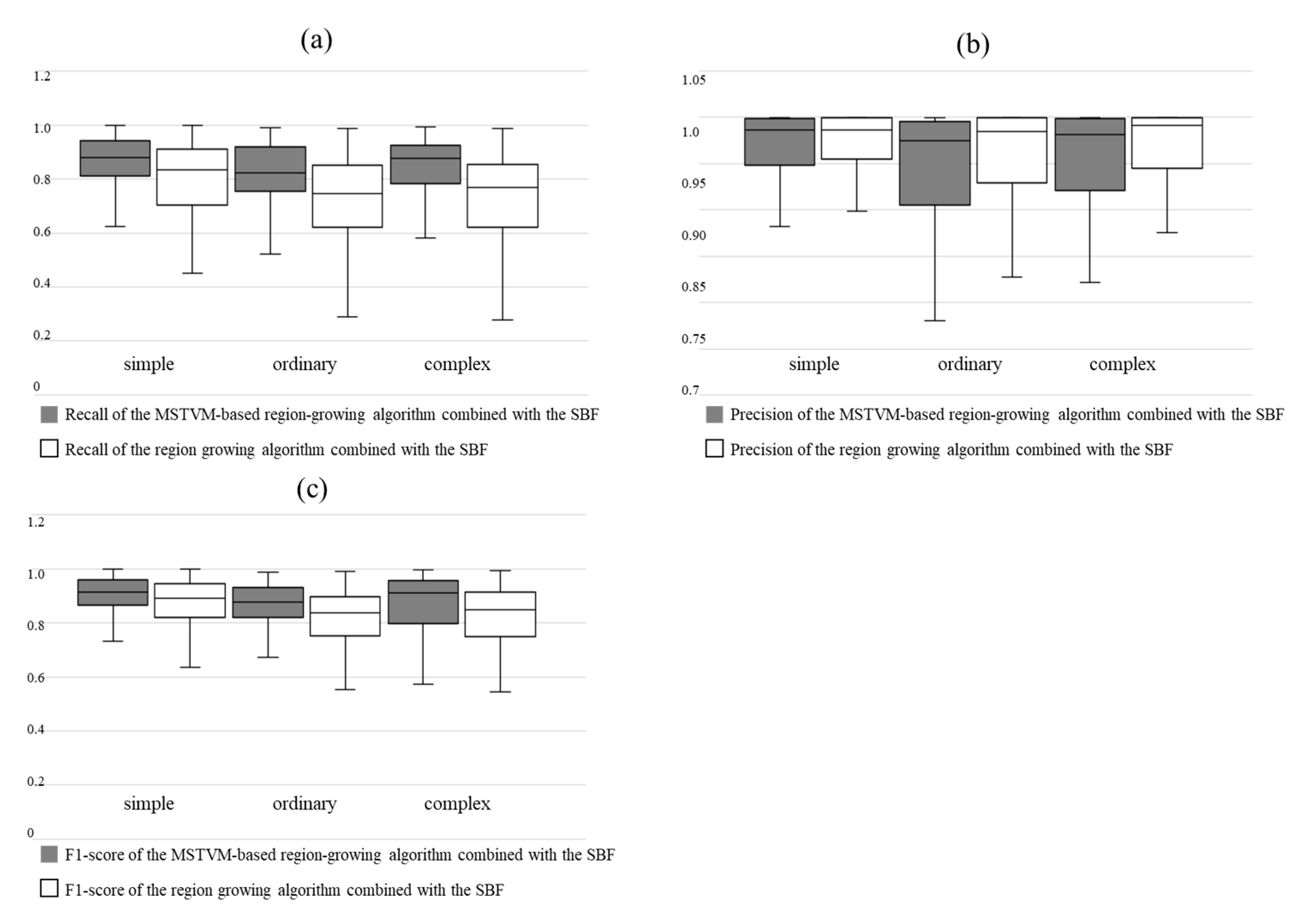
3.3. Evaluation of the Individual Leaf Segmentation for the Whole Plant
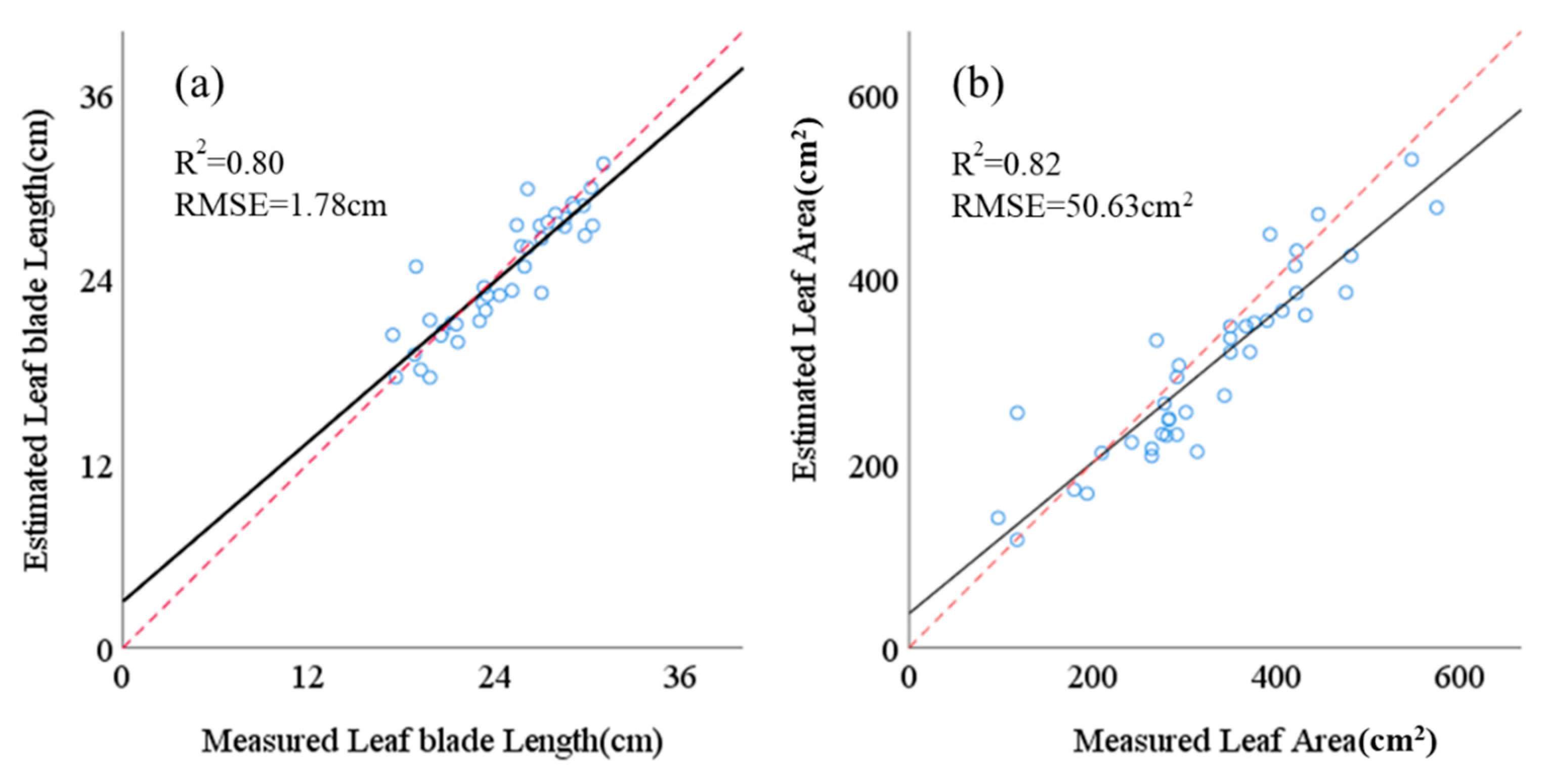
3.4. Evaluation of Extracted Phenotypic Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brar, N.; Dhillon, B.; Saini, K.S.; Sharma, P. Agronomy of sugarbeet cultivation—A review. Agric. Rev. 2015, 36, 184–197. [Google Scholar] [CrossRef]
- Zhang, Y.; Nan, J.; Yu, B. OMICS technologies and applications in sugar beet. Front. Plant Sci. 2016, 7, 900. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Furbank, R.T.; Tester, M. Phenomics–technologies to relieve the phenotyping bottleneck. Trends Plant Sci. 2011, 16, 635–644. [Google Scholar] [CrossRef]
- Phillips, R.L. Mobilizing science to break yield barriers. Crop Sci. 2010, 50, 99–108. [Google Scholar] [CrossRef] [Green Version]
- Dohm, J.C.; Minoche, A.E.; Holtgräwe, D.; Capella-Gutiérrez, S.; Zakrzewski, F.; Tafer, H.; Rupp, O.; Sörensen, T.R.; Stracke, R.; Reinhardt, R.; et al. The genome of the recently domesticated crop plant sugar beet (Beta vulgaris). Nature 2014, 505, 546–549. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- White, J.W.; Andrade-Sanchez, P.; Gore, M.A.; Bronson, K.F.; Coffelt, T.A.; Conley, M.M.; Feldmann, K.A.; French, A.N.; Heun, J.T.; Hunsaker, D.J.; et al. Field-based phenomics for plant genetics research. Field Crop. Res. 2012, 133, 101–112. [Google Scholar] [CrossRef]
- Xiao, S.; Chai, H.; Shao, K.; Shen, M.; Wang, Q.; Wang, R.; Sui, Y.; Ma, Y. Image-based dynamic quantification of aboveground structure of sugar beet in field. Remote Sens. 2020, 12, 269. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Wu, X.; Ku, L.; Chen, Y.; Wang, W. Evaluation of Three protein-extraction methods for proteome analysis of maize leaf midrib, a compound tissue rich in sclerenchyma cells. Front. Plant Sci. 2016, 7, 856. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weight, C.; Parnham, D.; Waites, R. TECHNICAL ADVANCE: LeafAnalyser: A computational method for rapid and large-scale analyses of leaf shape variation. Plant J. 2008, 53, 578–586. [Google Scholar] [CrossRef]
- Granier, C.; Aguirrezabal, L.; Chenu, K.; Cookson, S.J.; Dauzat, M.; Hamard, P.; Thioux, J.; Rolland, G.; Bouchier-Combaud, S.; Lebaudy, A.; et al. PHENOPSIS, an automated platform for reproducible phenotyping of plant responses to soil water deficit in Arabidopsis thaliana permitted the identification of an accession with low sensitivity to soil water deficit. New Phytol. 2006, 169, 623–635. [Google Scholar] [CrossRef]
- Gibbs, J.A.; Pound, M.; French, A.P.; Wells, D.M.; Murchie, E.; Pridmore, T. Plant phenotyping: An active vision cell for three-dimensional plant shoot reconstruction. Plant Physiol. 2018, 178, 524–534. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H.; Qian, Y.; Cao, P.; Yin, W.; Dai, F.; Hu, F.; Yan, Z. Calculation method of surface shape feature of rice seed based on point cloud. Comput. Electron. Agric. 2017, 142, 416–423. [Google Scholar] [CrossRef]
- Wu, G.; Li, B.; Zhu, Q.; Huang, M.; Guo, Y. Using color and 3D geometry features to segment fruit point cloud and improve fruit recognition accuracy. Comput. Electron. Agric. 2020, 174, 105475. [Google Scholar] [CrossRef]
- Paulus, S. Measuring crops in 3D: Using geometry for plant phenotyping. Plant Methods 2019, 15, 103. [Google Scholar] [CrossRef] [PubMed]
- Jin, S.; Su, Y.; Gao, S.; Wu, F.; Ma, Q.; Xu, K.; Hu, T.; Liu, J.; Pang, S.; Guan, H.; et al. Separating the structural components of maize for field phenotyping using terrestrial lidar data and deep convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2644–2658. [Google Scholar] [CrossRef]
- Bao, Y.; Tang, L.; Srinivasan, S.; Schnable, P.S. Field-based architectural traits characterisation of maize plant using time-of-flight 3D imaging. Biosyst. Eng. 2019, 178, 86–101. [Google Scholar] [CrossRef]
- Jin, S.; Su, Y.; Wu, F.; Pang, S.; Gao, S.; Hu, T.; Liu, J.; Guo, Q. Stem-leaf segmentation and phenotypic trait extraction of individual maize using terrestrial LiDAR data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1336–1346. [Google Scholar] [CrossRef]
- Xiang, L.; Bao, Y.; Tang, L.; Ortiz, D.; Salas-Fernandez, M.G. Automated morphological traits extraction for sorghum plants via 3D point cloud data analysis. Comput. Electron. Agric. 2019, 162, 951–961. [Google Scholar] [CrossRef]
- Harmening, C.; Paffenholz, J. A Fully automated three-stage procedure for spatio-temporal leaf segmentation with regard to the B-spline-based phenotyping of cucumber plants. Remote Sens. 2021, 13, 74. [Google Scholar] [CrossRef]
- Yang, Z.; Han, Y. A low-cost 3D phenotype measurement method of leafy vegetables using video recordings from smartphones. Sensors 2020, 20, 6068. [Google Scholar] [CrossRef]
- Zhu, B.; Liu, F.; Xie, Z.; Guo, Y.; Li, B.; Ma, Y. Quantification of light interception within image-based 3-D reconstruction of sole and intercropped canopies over the entire growth season. Ann. Bot. 2020, 126, 701–712. [Google Scholar] [CrossRef] [Green Version]
- Ghahremani, M.; Williams, K.; Corke, F.; Tiddeman, B.; Liu, Y.; Wang, X.; Doonan, J.H. Direct and accurate feature extraction from 3D point clouds of plants using RANSAC. Comput. Electron. Agric. 2021, 187, 106240. [Google Scholar] [CrossRef]
- Elnashef, B.; Filin, S.; Lati, R.N. Tensor-based classification and segmentation of three-dimensional point clouds for organ-level plant phenotyping and growth analysis. Comput. Electron. Agric. 2019, 156, 51–61. [Google Scholar] [CrossRef]
- Miao, T.; Zhu, C.; Xu, T.; Yang, T.; Li, N.; Zhou, Y.; Deng, H. Automatic stem-leaf segmentation of maize shoots using three-dimensional point cloud. Comput. Electron. Agric. 2021, 187, 106310. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Q.; Wang, P.; Li, Z.; Wang, H. Automated classification of stems and leaves of potted plants based on point cloud data. Biosyst. Eng. 2020, 200, 215–230. [Google Scholar] [CrossRef]
- Gélard, W.; Herbulot, A.; Devy, M.; Debaeke, P.; McCormick, R.F.; Truong, S.K.; Mullet, J. Leaves Segmentation in 3D Point Cloud. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems, Antwerp, Belgium, 8–21 September 2017; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Shi, W.; van de Zedde, R.; Jiang, H.; Kootstra, G. Plant-part segmentation using deep learning and multi-view vision. Biosyst. Eng. 2019, 187, 81–95. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Y.; Doonan, J. Point Cloud Based Iterative Segmentation Technique for 3D Plant Phenotyping. In Proceedings of the 2018 IEEE International Conference on Information and Automation, Wuyishan, China, 11–13 August 2018. [Google Scholar]
- Dandrifosse, S.; Bouvry, A.; Leemans, V.; Dumont, B.; Mercatoris, B. Imaging wheat canopy through stereo vision: Over-coming the challenges of the laboratory to field transition for morphological features extraction. Front. Plant Sci. 2020, 11, 96. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Müller-Linow, M.; Pinto-Espinosa, F.; Scharr, H.; Rascher, U. The leaf angle distribution of natural plant populations: Assessing the canopy with a novel software tool. Plant Methods 2015, 11, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pinto, F.; Müller-Linow, M.; Schickling, A.; Cendrero-Mateo, M.P.; Ballvora, A.; Rascher, U. Multiangular observation of canopy sun-induced chlorophyll fluorescence by combining imaging spectroscopy and stereoscopy. Remote Sens. 2017, 9, 415. [Google Scholar] [CrossRef] [Green Version]
- Scholz, O.; Uhrmann, F.; Wolff, A.; Pieger, K.; Penk, D. Determination of Detailed Morphological Features for Phenotyping of Sugar Beet Plants Using 3d-Stereoscopic Data. In Proceedings of the ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences 2019, Munich, Germany, 18–20 September 2019. [Google Scholar]
- Lowe, D.G. Object recognition from scale-invariant keypoints. In Proceedings of the IEEE International Conference on Computer Vision 1999, Kerkyra, Corfu, Greece, 20–25 September 1999. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Zhou, Q.; Park, J.; Koltun, V. Open3D: A Modern Library for 3D Data Processing. arXiv 2018, arXiv:1801.09847. [Google Scholar]
- Rolf, A.; Leanne, B. Seeded region growing. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 641–647. [Google Scholar]
- Besl, P.J.; Jain, R.C. Segmentation through variable-order surface fitting. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 167–192. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Zhang, X.; Shi, W.; Cardenas, A.; Li, K.; Michelle, A. An accurate and robust region-growing algorithm for plane segmentation of TLS point clouds using a multiscale tensor voting method. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 4160–4168. [Google Scholar] [CrossRef]
- Park, M.K.; Lee, S.J.; Lee, K.H. Multi-scale tensor voting for feature extraction from unstructured point clouds. Graph. Models 2012, 74, 197–208. [Google Scholar] [CrossRef]
- Wang, G.; Gertner, G.; Xlao, X.; Wente, S.; Anderson, A. Appropriate plot size and spatial resolution for mapping multiple vegetation types. Photogramm. Eng. Remote Sens. 2001, 67, 575–584. [Google Scholar]
- Medioni, G.; Tang, C.; Lee, M. Tensor Voting: Theory and Applications. In Proceedings of the RFIA 2000, Paris, France, 1–3 February 2000; pp. 215–237. [Google Scholar]
- Mordohai, P.; Medioni, G.E.R. Dimensionality Estimation, manifold learning and function approximation using tensor voting. J. Mach. Learn. Res. 2010, 11, 411–450. [Google Scholar]
- Tang, C.; Lee, M.; Medioni, G. Tensor Voting. In Perceptual Organization for Artificial Vision Systems; Springer: Berlin/Heidelberg, Germany, 2000; pp. 215–237. [Google Scholar]
- You, R.; Lin, B. Building feature extraction from airborne lidar data based on tensor voting algorithm. Photogramm. Eng. Remote Sens. 2011, 77, 1221–1231. [Google Scholar] [CrossRef]
- Rabbani, T.; Van Den Heuvel, F.A.; Vosselman, G. Segmentation of Point Clouds Using Smoothness Constraint. In Proceedings of the International Society for Photogrammetry and Remote Sensing, Dresden, Germany, 25–27 January 2006. [Google Scholar]
- Li, D.; Cao, Y.; Shi, G.; Cai, X.; Chen, Y.; Wang, S.; Yan, S. An Overlapping-free leaf segmentation method for plant point clouds. IEEE Access 2019, 7, 129054–129070. [Google Scholar] [CrossRef]
- Bourke, P. Efficient Triangulation Algorithm Suitable for Terrain Modelling. In Proceedings of the Pan Pacific Computer Conference, Beijing, China, 1 January 1989. [Google Scholar]
- He, J.; Reddy, G.V.P.; Liu, M.; Shi, P. A general formula for calculating surface area of the similarly shaped leaves: Evidence from six Magnoliaceae species. Glob. Ecol. Conserv. 2020, 23, e1129. [Google Scholar] [CrossRef]
- Feng, L.; Han, X. Correction factor for leaf area of sesame, sweet potato and beet. J. Shanxi Agric. Sci. 1992, 5, 20. [Google Scholar]
- Hui, F.; Zhu, J.; Hu, P.; Meng, L.; Zhu, B.; Guo, Y.; Li, B.; Ma, Y. Image-based dynamic quantification and high-accuracy 3D evaluation of canopy structure of plant populations. Ann. Bot. 2018, 121, 1079–1088. [Google Scholar] [CrossRef] [PubMed]
- Zhu, B.; Liu, F.; Che, Y.; Hui, F.; Ma, Y. Three-Dimensional Quantification of Intercropping Crops in Field by Ground and Aerial Photography. In Proceedings of the 6th International Symposium on Plant Growth Modeling, Simulation, Visualization and Applications 2018, Beijing, China, 4–8 November 2018. [Google Scholar]
- Hsu, C.; Lin, C. A comparison of methods for multiclass support vector machines. IEEE Trans. Neural Netw. 2002, 13, 415–425. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Zhou, J.; Fu, X.; Zhou, S.; Zhou, J.; Ye, H.; Nguyen, H.T. Automated segmentation of soybean plants from 3D point cloud using machine learning. Comput. Electron. Agric. 2019, 162, 143–153. [Google Scholar] [CrossRef]
- Jinyong, W.; Wenrong, T.; Shuaimin, H.; Yang, W.; Hongna, Z. Research on Quantification Method of Maize Leaf Phenotype Parameters Based on Machine Vision. In Proceedings of the 2020 International Symposium on Computer Engineering and Intelligent Communications, Guangzhou, China, 7–9 August 2020. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plant Categories | Simple | Ordinary | Complex | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy Indicators | p | r | f1 | p | r | f1 | p | r | f1 |
| Region-growing algorithm | 0.97 ± 0.08 | 0.79 ± 0.17 | 0.86 ± 0.13 | 0.97 ± 0.05 | 0.78 ± 0.16 | 0.85 ± 0.11 | 0.96 ± 0.07 | 0.74 ± 0.18 | 0.82 ± 0.14 |
| MSTVM-based region-growing algorithm | 0.96 ± 0.08 | 0.85 ± 0.14 | 0.89 ± 0.11 | 0.96 ± 0.07 | 0.86 ± 0.12 | 0.90 ± 0.09 | 0.95 ± 0.09 | 0.85 ± 0.14 | 0.89 ± 0.10 |
| Plant Categories | Simple | Ordinary | Complex | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy Indicators | p | r | f1 | p | r | f1 | p | r | f1 |
| T | −1.33 | 5.29 | 4.08 | −2.91 | 8.48 | 6.12 | −2.21 | 9.90 | 7.31 |
| p | 0.18 | 0.00 * | 0.00 * | 0.00 * | 0.00 * | 0.00 * | 0.03 * | 0.00 * | 0.00 * |
| Plant Categories | Simple | Ordinary | Complex | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy Indicators | p | r | f1 | p | r | f1 | p | r | f1 |
| K-means | 0.88 ± 0.15 | 0.79 ± 0.14 | 0.79 ± 0.16 | 0.88 ± 0.16 | 0.77 ± 0.15 | 0.76 ± 0.15 | 0.87 ± 0.16 | 0.76 ± 0.15 | 0.75 ± 0.15 |
| SBF | 0.93 ± 0.12 | 0.83 ± 0.12 | 0.87 ± 0.13 | 0.93 ± 0.11 | 0.81 ± 0.14 | 0.86 ± 0.11 | 0.91 ± 0.12 | 0.79 ± 0.14 | 0.83 ± 0.11 |
| Plant Categories | Simple | Ordinary | Complex | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy Indicators | p | r | f1 | p | r | f1 | p | r | f1 |
| T | 2.30 | 1.15 | 3.08 | 1.98 | 2.54 | 5.29 | −0.32 | 0.51 | 1.84 |
| p | 0.03 * | 0.26 | 0.01 * | 0.05 * | 0.01 * | 0.00 * | 0.75 | 0.60 | 0.07 |
| Plant Categories | Simple | Ordinary | Complex | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy Indicators | p | r | f1 | p | r | f1 | p | r | f1 |
| Region-growing algorithm combined with SBF | 0.96 ± 0.07 | 0.77 ± 0.17 | 0.84 ± 0.13 | 0.96 ± 0.05 | 0.75 ± 0.16 | 0.84 ± 0.11 | 0.95 ± 0.07 | 0.72 ± 0.17 | 0.81 ± 0.14 |
| MSTVM-based region-growing algorithm combined with SBF | 0.95 ± 0.09 | 0.84 ± 0.14 | 0.88 ± 0.11 | 0.95 ± 0.09 | 0.83 ± 0.13 | 0.89 ± 0.10 | 0.93 ± 0.10 | 0.83 ± 0.14 | 0.87 ± 0.10 |
| Plant Categories | Simple | Ordinary | Complex | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy Indicators | p | r | f1 | p | r | f1 | p | r | f1 |
| T | −1.99 | 6.51 | 4.44 | −2.71 | 9.88 | 7.22 | −3.04 | 11.04 | 7.51 |
| p | 0.05 * | 0.00 * | 0.00 * | 0.01 * | 0.00 * | 0.00 * | 0.03 * | 0.00 * | 0.00 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, G.; Shao, K.; Xiao, S.; Wang, Q.; Zhu, J.; Wang, R.; Meng, L.; Ma, Y. Segmentation of Individual Leaves of Field Grown Sugar Beet Plant Based on 3D Point Cloud. Agronomy 2022, 12, 893. https://doi.org/10.3390/agronomy12040893
Liu Y, Zhang G, Shao K, Xiao S, Wang Q, Zhu J, Wang R, Meng L, Ma Y. Segmentation of Individual Leaves of Field Grown Sugar Beet Plant Based on 3D Point Cloud. Agronomy. 2022; 12(4):893. https://doi.org/10.3390/agronomy12040893
Chicago/Turabian StyleLiu, Yunling, Guoli Zhang, Ke Shao, Shunfu Xiao, Qing Wang, Jinyu Zhu, Ruili Wang, Lei Meng, and Yuntao Ma. 2022. "Segmentation of Individual Leaves of Field Grown Sugar Beet Plant Based on 3D Point Cloud" Agronomy 12, no. 4: 893. https://doi.org/10.3390/agronomy12040893
APA StyleLiu, Y., Zhang, G., Shao, K., Xiao, S., Wang, Q., Zhu, J., Wang, R., Meng, L., & Ma, Y. (2022). Segmentation of Individual Leaves of Field Grown Sugar Beet Plant Based on 3D Point Cloud. Agronomy, 12(4), 893. https://doi.org/10.3390/agronomy12040893