
Citrus Fruit Movement Assessment Related to Fruit Damage during Harvesting with an Experimental Low-Frequency–High-Amplitude Device



Abstract
:1. Introduction
2. Materials and Methods
3. Results
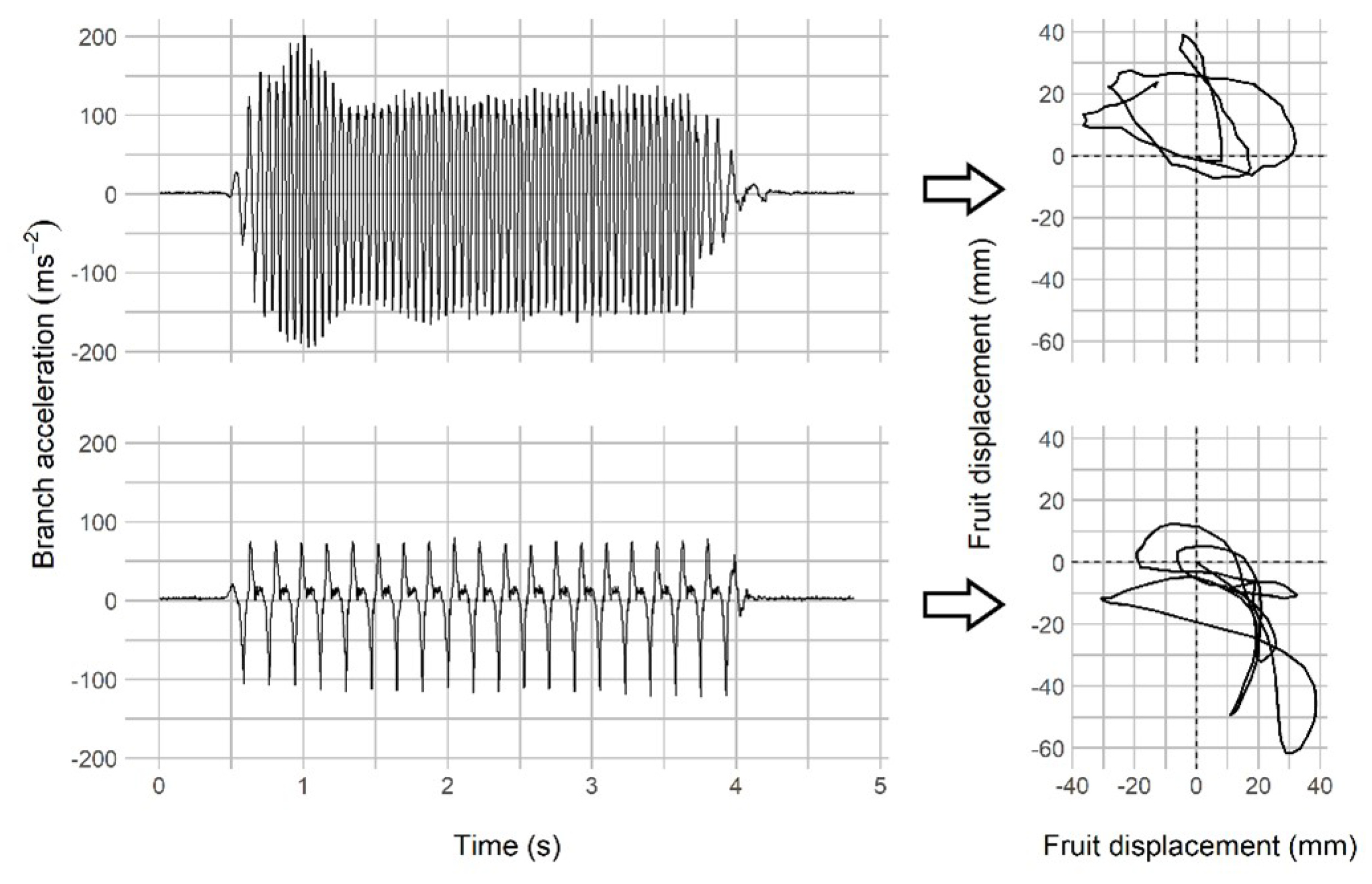
3.1. Vibration Frequency of the Fruit
3.2. Acceleration of the Fruit
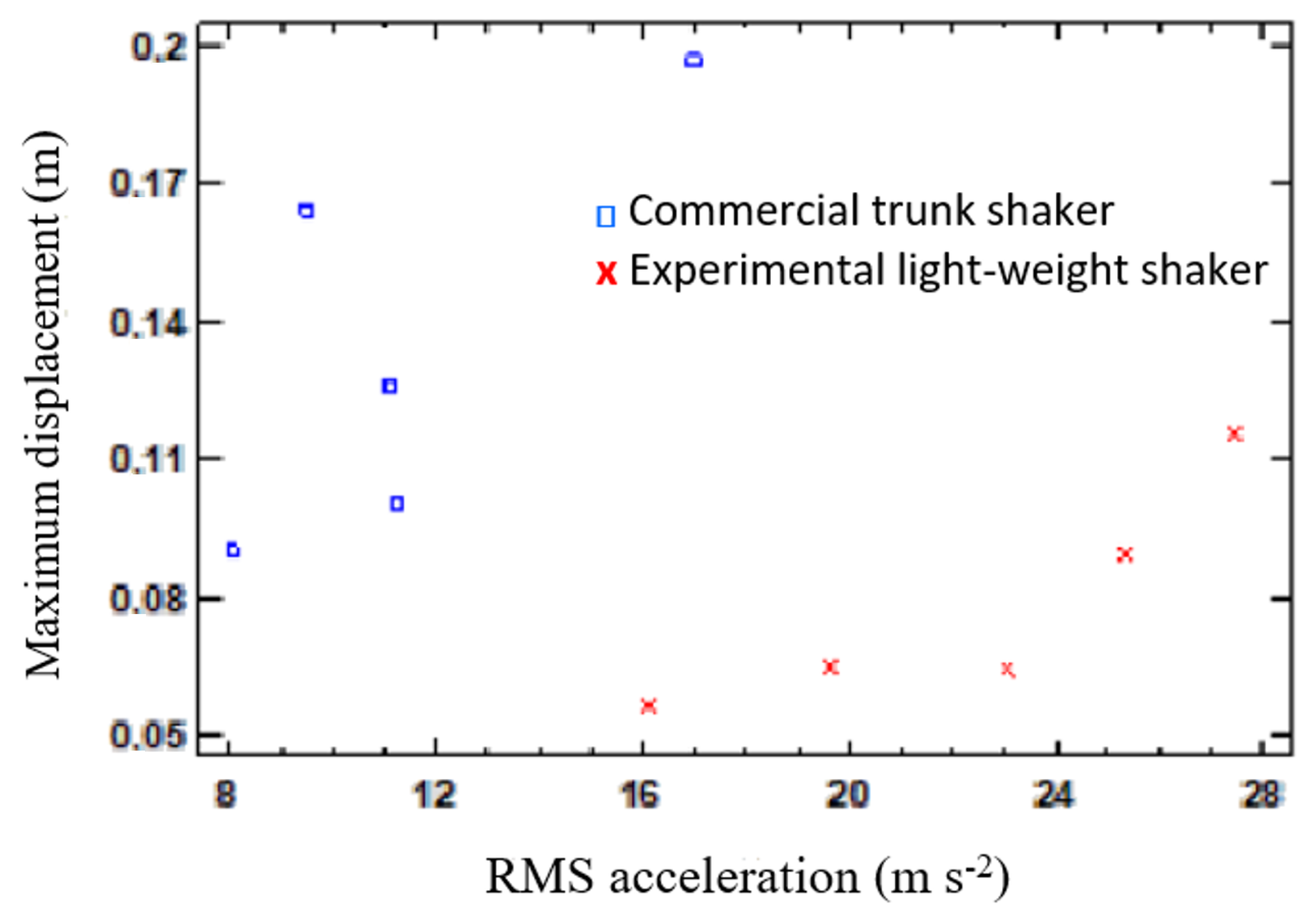
3.3. Displacement Related to the Initial Position
3.4. Discriminant Analysis of the Fruit
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gupta, S.K.; Ehsani, R.; Kim, N.H. Optimization of a Citrus Canopy Shaker Harvesting System: Mechanistic Tree Damage and Fruit Detachment Models. Trans. ASABE 2016, 59, 761–776. [Google Scholar]
- Whitney, J. Performance of mechanical citrus harvesters in Florida Optimization of a Citrus Canopy Shaker Harvesting System: Mechanistic Tree Damage and Fruit Detachment Models. In Proceedings of the International Society of Citriculture, Orlando, FL, USA, 3–7 December 2000; pp. 277–279. [Google Scholar]
- Whitney, J.D.; Churchill, D.B.; Hedden, S.L.; Smerage, G.H. Trunk Shakers for Citrus Harvesting—Part I: Measured Trunk Shaker and Tree Trunk Motion. Appl. Eng. Agric. 1988, 4, 93–101. [Google Scholar] [CrossRef]
- Savary, S.K.J.U.; Ehsani, R.; Schueller, J.K.; Rajaraman, B.P. Simulation study of citrus tree canopy motion during harvesting using a canopy shaker. Trans. ASABE 2010, 53, 1373–1381. [Google Scholar] [CrossRef]
- Savary, S.K.J.U.; Ehsani, R.; Salyani, M.; Hebel, M.A.; Bora, G.C. Study of force distribution in the citrus tree canopy during harvest using a continuous canopy shaker. Comput. Electron. Agric. 2011, 76, 51–58. [Google Scholar] [CrossRef]
- Liu, T.H.; Ehsani, R.; Toudeshki, A.; Zou, X.J.; Wang, H.J. Experimental Study of Vibrational Acceleration Spread and Comparison Using Three Citrus Canopy Shaker Shaking Tines. Shock Vib. 2017, 2017, 9827926. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, C.; Torregrosa, A. Determining adequate vibration frequency, amplitude, and time for mechanical harvesting of fresh mandarins. Trans. ASABE 2013, 56, 15–22. [Google Scholar] [CrossRef] [Green Version]
- Castro-Garcia, S.; Aragon-Rodriguez, F.; Sola-Guirado, R.R.; Serrano, A.J.; Soria-Olivas, E.; Gil-Ribes, J.A. Vibration Monitoring of the Mechanical Harvesting of Citrus to Improve Fruit Detachment Efficiency. Sensors 2019, 19, 1760. [Google Scholar] [CrossRef] [Green Version]
- Hedden, S.L.; Churchill, D.B.; Whitney, J.D. Trunk Shakers for Citrus Harvesting—Part II: Tree Growth, Fruit Yield and Removal. Appl. Eng. Agric. 1988, 4, 102–106. [Google Scholar] [CrossRef]
- Brown, G.K. Mechanical harvesting systems for the Florida citrus juice industry. In Proceedings of the ASAE Annual Meeting, Chicago, IL, USA, 28–31 July 2002; Volume 021108. Appl Paper Number 021108. [Google Scholar]
- Whitney, J.D.; Hyman, B.R.; Roka, F.M. The past, present and future of citrus mechanical harvesting. In Proceedings of the I International Symposium on Mechanical Harvesting and Handling Systems of Fruits and Nuts, Lake Alfred, FL, USA, 1–4 April 2012; Volume 965. Appl ISHS Acta Horticulturae 965. [Google Scholar]
- Torregrosa, A.; Ortiz, C.; Martín, B.; Moreno, R.; Moltó, E.; Chueca, P. Mechanical harvesting of citrus fruits for fresh market with a trunk shaker and a hand-held petrol shaker. In Proceedings of the I International Symposium on Mechanical Harvesting and Handling Systems of Fruits and Nuts, Lake Alfred, FL, USA, 1–4 April 2012; Volume 965. Appl ISHS Acta Horticulturae 965. [Google Scholar]
- Torregrosa, A.; Ortí, E.; Martin, B.; Gil, J.; Ortiz, C. Mechanical harvesting of oranges and mandarins in Spain. Biosyst. Eng. 2009, 104, 18–24. [Google Scholar] [CrossRef]
- Moreno, R.; Torregrosa, A.; Moltó, E.; Chueca, P. Detachment and defoliation of citrus grown under Mediterranean conditions. Span. J. Agric. Res. 2015, 13, e02-006. [Google Scholar] [CrossRef] [Green Version]
- Castillo-Ruiz, F.J.; Tombesi, S.; Farinelli, D. Tracking olive fruit movement and twisting during the harvesting process using video analysis. In Proceedings of the VIII International Olive Symposium, Split, Croatia, 10–14 October 2016; Volume 1199. Appl ISHS Acta Horticulturae 1199. [Google Scholar]
- Federenko, Y. Movement modes of a fruit during vibration harvesting. In Proceedings of the International Conference on Sustainable Development of Cross-Border Regions, Barnaul, Russia, 19–20 April 2019; Volume 395, p. 012061, Conference Series: Earth and Environmental Science. [Google Scholar]
- Spann, T.M.; Danyluk, M.D. Mechanical Harvesting Increases Leaf and Stem Debris in Loads of Mechanically Harvested Citrus Fruit. HortScience 2010, 45, 1287–1300. [Google Scholar] [CrossRef] [Green Version]
- Torregrosa, A.; Albert, F.; Aleixos, N.; Ortiz, C.; Blasco, J. Analysis of the detachment of citrus fruits by vibration using artificial vision. Biosyst. Eng. 2014, 119, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, C.; Blasco, J.; Balasch, S.; Torregrosa, A. Shock absorbing surfaces for collecting fruit during the mechanical harvesting of citrus. Biosyst. Eng. 2011, 110, 2–9. [Google Scholar] [CrossRef]
- Torregrosa, A.; Molina, J.M.; Pérez, M.; Ortí, E.; Xamani, P.; Ortiz, C. Mechanical Harvesting of Ornamental Citrus Trees in Valencia, Spain. Agronomy 2019, 9, 827. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, C.; Torregrosa, A. Damages Produced to Citrus Fruits During Detachment Using a High Amplitude and Low Frequency Shaker. In Proceedings of the EurAgEng Conference, Évora, Portugal, 4–8 July 2021. [Google Scholar]
- Ortiz, C.; Torregrosa, A.; Castro-García, S. Comparison of a Lightweight Experimental Shaker and an Orchard Tractor Mounted Trunk Shaker for Fresh Market Citrus Harvesting. Agriculture 2021, 11, 1092. [Google Scholar] [CrossRef]
- Hussein, Z.; Fawole, O.A.; Opara, U.L. Harvest and Postharvest Factors Affecting Bruise Damage of Fresh Fruits. Hortic. Plant J. 2020, 6, 1–13. [Google Scholar] [CrossRef]
- Castro-García, S.; Rosa, U.A.; Gliever, C.J.; Smith, D.; Burns, J.K.; Ferguson, L.; Glozer, K. Video Evaluation of Table Olive Damage during Harvest with a Canopy Shaker. HortTech 2009, 19, 260–266. [Google Scholar] [CrossRef] [Green Version]
- Jiménez-Jiménez, F.; Castro-García, S.; Blanco-Roldán, G.L.; González-Sánchez, E.J.; Gil-Ribes, J.A. Isolation of Table Olive Damage Causes and Bruise Time Evolution during Fruit Detachment with Trunk Shaker. Span. J. Agric. Res. 2013, 11, 65–71. [Google Scholar] [CrossRef] [Green Version]
- Aragón-Rodriguez, F.; Castro-García, S.; Solá-Guirado, R.R.; Gil-Ribes, J.A. Fruit Abscission Pattern of ‘Valencia’ Orange with Canopy Shaker System. Sci. Hortic. 2019, 246, 916–920. [Google Scholar] [CrossRef]
- Pu, Y.; Toudeshki, A.; Ehsani, R.; Yang, F. Design and evaluation of a two-section canopy shaker with variable frequency for mechanical harvesting of citrus. Int. J. Agric. Biol. Eng. 2018, 11, 77–87. [Google Scholar] [CrossRef] [Green Version]
- He, L.; Liu, X.; Du, X.; Wu, C. In-situ identification of shaking frequency for adaptive vibratory fruit harvesting. Comput. Electron. Agric. 2020, 118, 186–193. [Google Scholar] [CrossRef]
- Sola-Guirado, R.; Castro-García, S.; Blanco-Roldán, G.L.; Jiménez-Jiménez, F.; Castillo-Ruiz, F.J.; Gil-Ribes, J.A. Traditional Olive Tree Response to Oil Olive Harvesting Technologies. Biosyst. Eng. 2014, 118, 186–193. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fruit Velocity (m s−1) | Fruit Acceleration (m s−2) | |||
|---|---|---|---|---|
| Device | RMS | Maximum | RMS | Maximum |
| CTS | 0.35 (0.06) b | 1.14 (0.22) a | 22.31 (4.53) a | 75.87 (24.25) b |
| ELWS | 0.22 (0.06) a | 0.78 (0.28) a | 11.36 (3.40) a | 43.54 (17.08) a |
| Fruit Displacement (mm) | Max Fruit Displacement (mm) | |||
|---|---|---|---|---|
| Device | Average | Maximum | Horizontal Axis | Vertical Axis |
| CTS | 36.8 (14.8) b | 78.0 (24.4) b | 72.9 (23.9) b | 49.8 (18.4) a |
| ELWS | 62.0 (14.2) a | 135.1 (44.8) a | 111.1 (25.7) a | 95.0 (57.7) a |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortiz, C.; Torregrosa, A.; Castro-García, S. Citrus Fruit Movement Assessment Related to Fruit Damage during Harvesting with an Experimental Low-Frequency–High-Amplitude Device. Agronomy 2022, 12, 1337. https://doi.org/10.3390/agronomy12061337
Ortiz C, Torregrosa A, Castro-García S. Citrus Fruit Movement Assessment Related to Fruit Damage during Harvesting with an Experimental Low-Frequency–High-Amplitude Device. Agronomy. 2022; 12(6):1337. https://doi.org/10.3390/agronomy12061337
Chicago/Turabian StyleOrtiz, Coral, Antonio Torregrosa, and Sergio Castro-García. 2022. "Citrus Fruit Movement Assessment Related to Fruit Damage during Harvesting with an Experimental Low-Frequency–High-Amplitude Device" Agronomy 12, no. 6: 1337. https://doi.org/10.3390/agronomy12061337
APA StyleOrtiz, C., Torregrosa, A., & Castro-García, S. (2022). Citrus Fruit Movement Assessment Related to Fruit Damage during Harvesting with an Experimental Low-Frequency–High-Amplitude Device. Agronomy, 12(6), 1337. https://doi.org/10.3390/agronomy12061337