
An Enveloping, Centering, and Grabbing Mechanism for Harvesting Hydroponic Leafy Vegetables Cultivated in Pipeline

(This article belongs to the Section Agricultural Biosystem and Biological Engineering)
Abstract
:1. Introduction
2. Materials and Methods
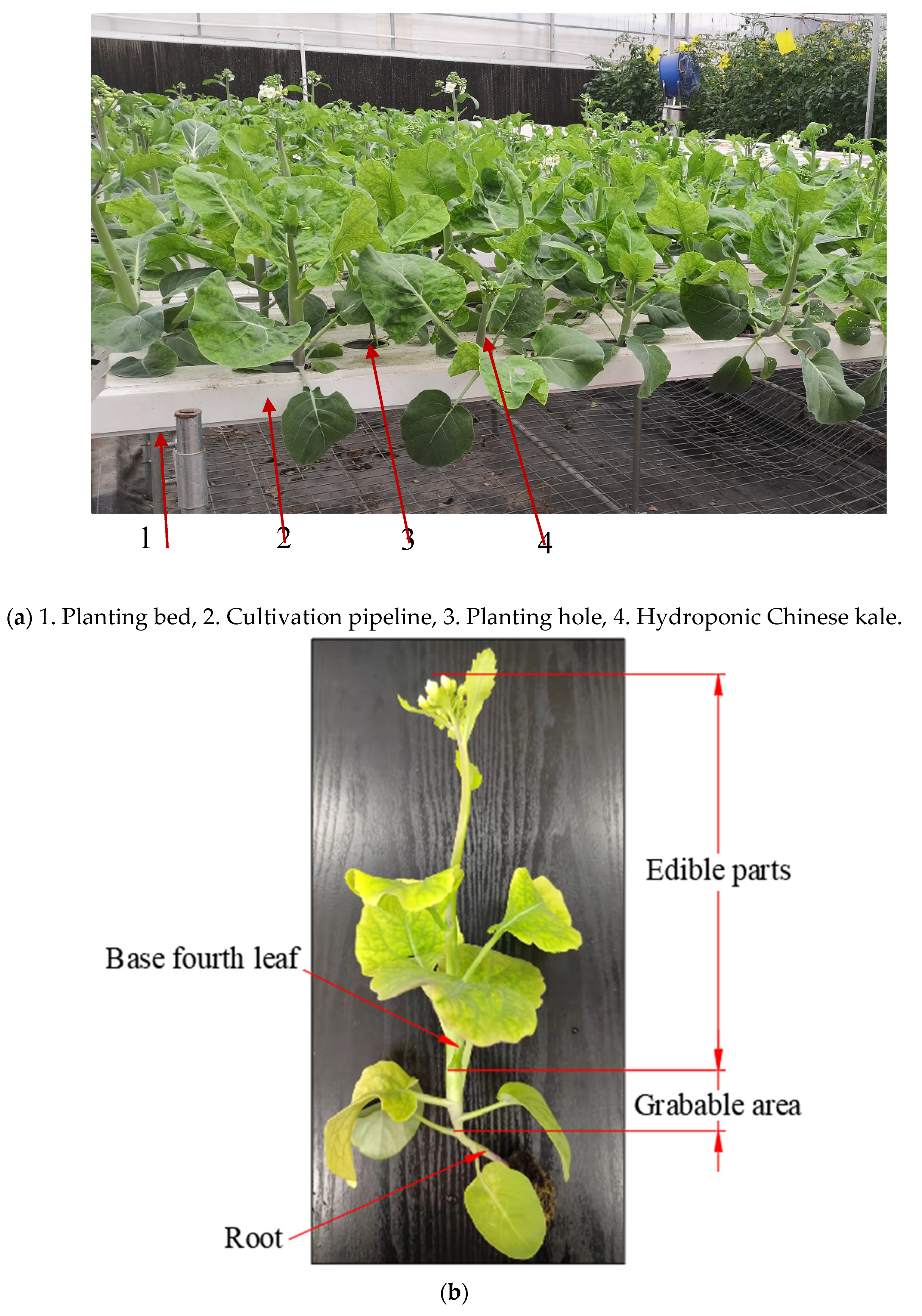
2.1. Hydroponic Chinese Kale Cultivated in Pipelines
2.2. Grabbing Mechanism
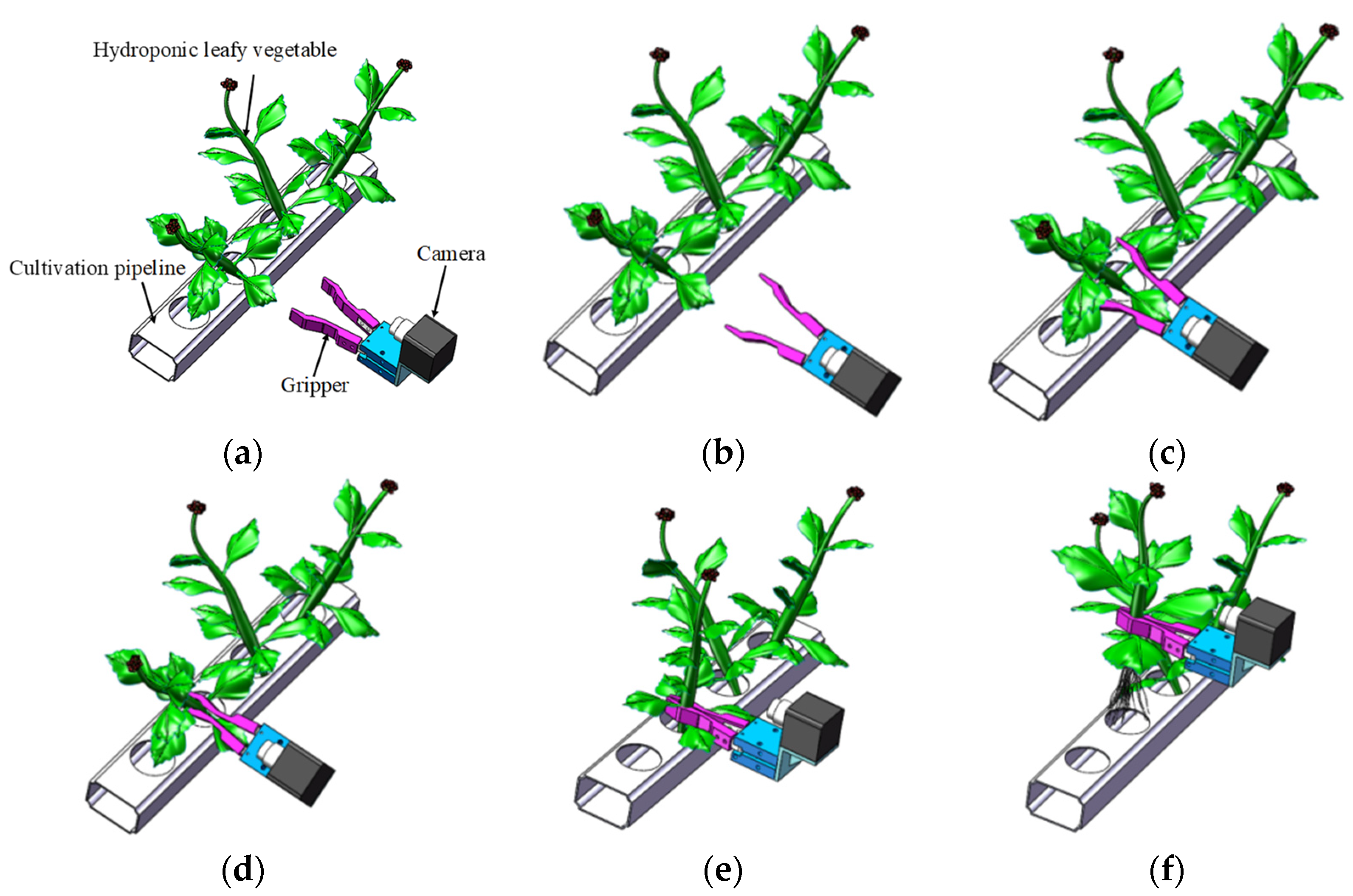
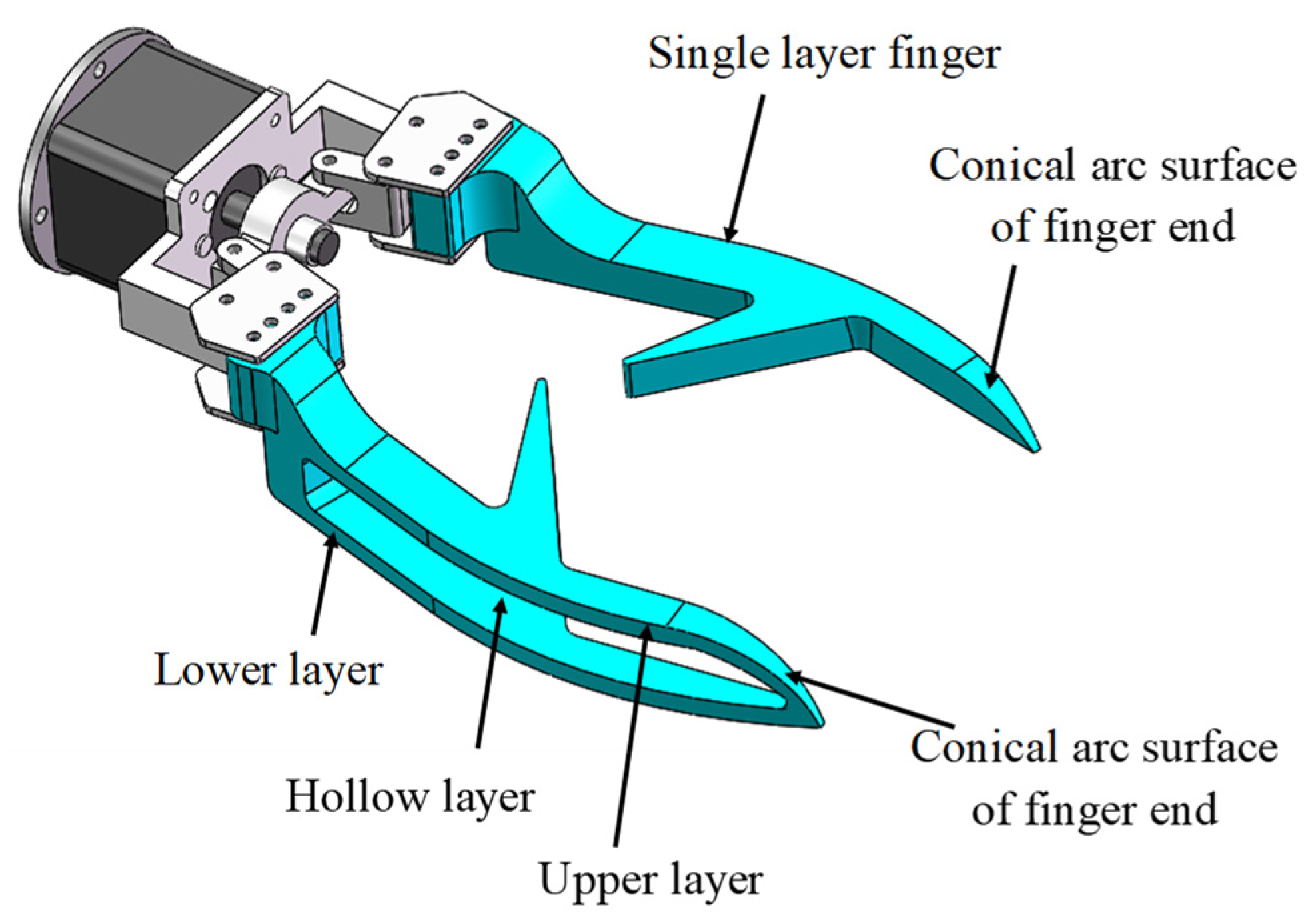
2.2.1. Conceptual Design
2.2.2. Main Parameters of the Relationships of the Grabbing Mechanism
2.2.3. Parameter Optimization of the Grabbing Mechanism
2.3. Grasping Test
2.3.1. Test Platform
2.3.2. Test Method
3. Results and Discussion
3.1. Results of Grasping Inclination Angle
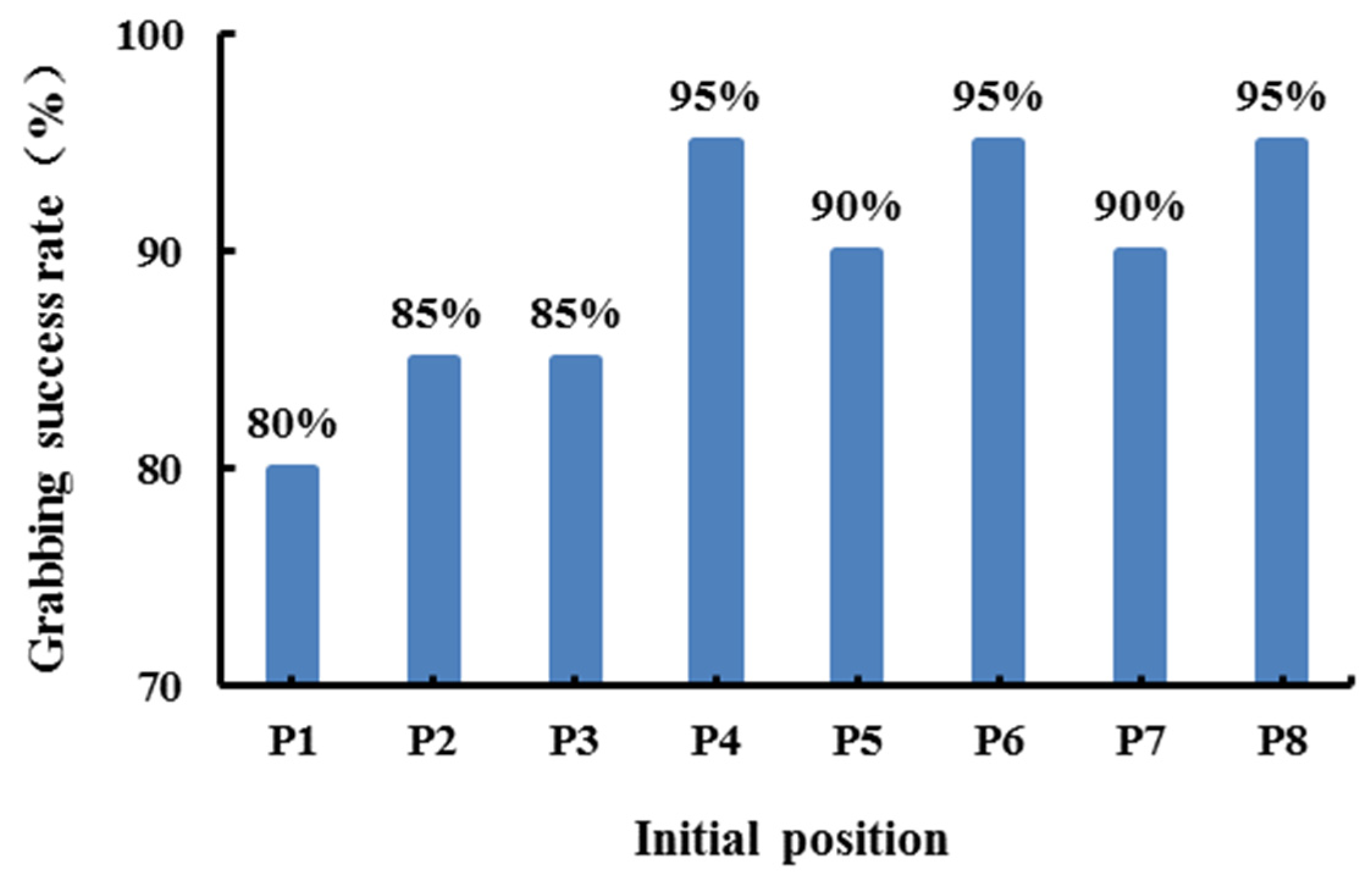
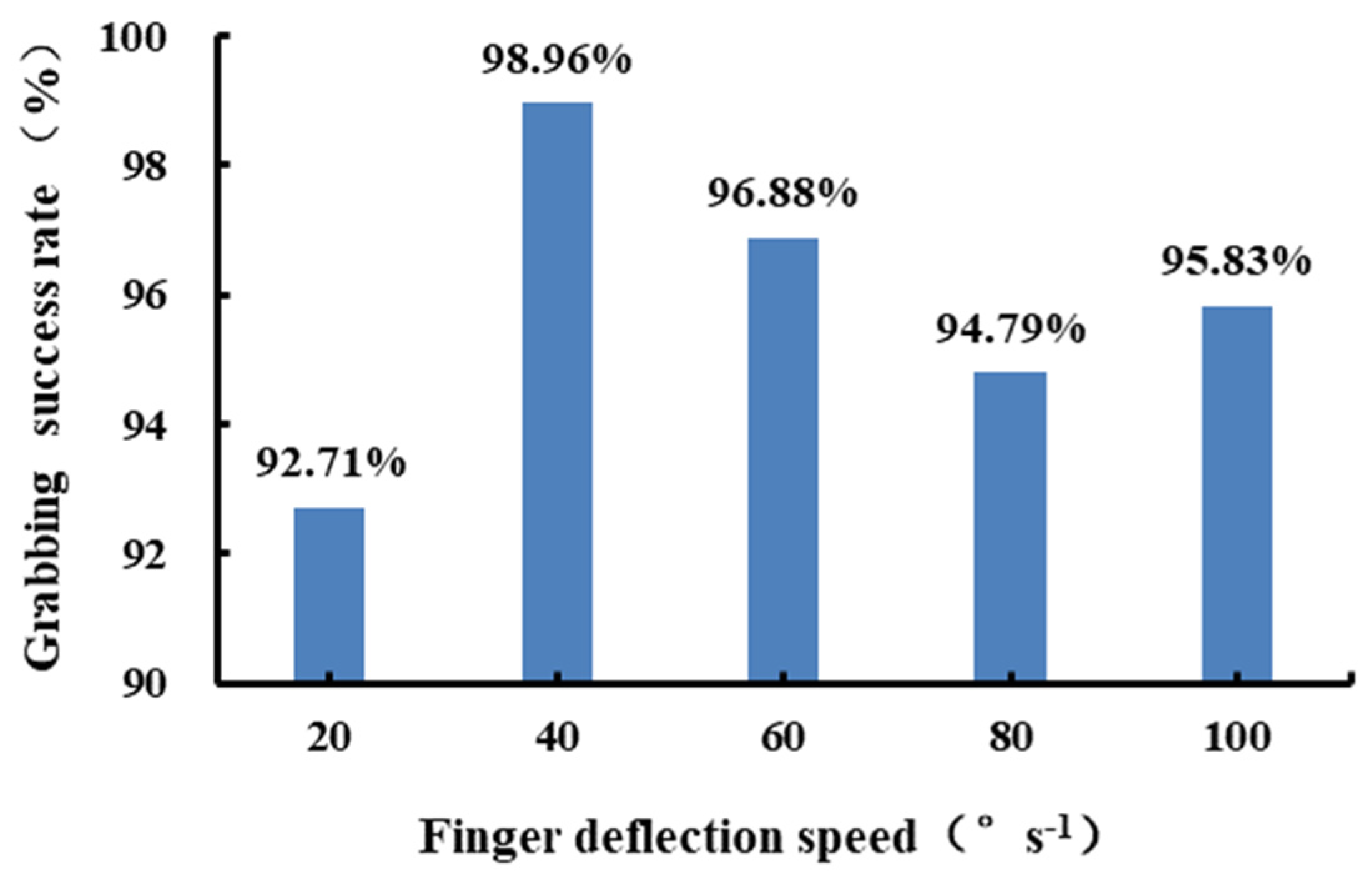
3.2. Results of the Grabbing Success Rate
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khan, F.A. A review on hydroponic greenhouse cultivation for sustainable agriculture. Int. J. Agric. Environ. Food Sci. 2018, 2, 59–66. [Google Scholar] [CrossRef]
- Khan, S.; Purohit, A.; Vadsaria, N. Hydroponics: Current and future state of the art in farming. J. Plant Nutr. 2020, 44, 1515–1538. [Google Scholar] [CrossRef]
- Sharma, N.; Acharya, S.; Kumar, K.; Singh, N.; Chaurasia, O.P. Hydroponics as an advanced technique for vegetable production: An overview. J. Soil Water Conserv. 2018, 17, 364–371. [Google Scholar] [CrossRef]
- Liu, S. The industrialization prospect, existing problems and solutions of hydroponic vegetables. Agric. Eng. Technol. 2017, 37, 39–45. [Google Scholar] [CrossRef]
- Li, Z.; Yang, Q.; Sha, D.; Ma, W. Research progress on the full mechanization production of hydroponic leafy vegetables in plant factory. J. China Agric. Univ. 2022, 27, 12–21. [Google Scholar] [CrossRef]
- Liu, N.H.; Xu, C.; Xiong, Z.; Wu, Y.F.; Wang, Z.Y.; Huang, J.R. Design and experiment of automatic equipment for transplanting and conveying Hydroponic leafy vegetable. Agric. Eng. Technol. 2020, 40, 23–27. [Google Scholar] [CrossRef]
- Qin, S.; Gu, S.; Wang, Y. The production systalk of hydroponic leafy vegetables mechanical large-scale in European. J. Agric. Mech. Res. 2017, 39, 264–268. [Google Scholar] [CrossRef]
- Yang, Y.; Jiang, H.; Yang, D.; Gu, S. Automated production system of hydroponic leafy vegetables. Mod. Agric. Equip. 2016, 222, 35–37. [Google Scholar] [CrossRef]
- Xu, Y.; Xie, W.; Liu, D.; Chen, T.; Zhang, Y.; Dong, S.; Deng, H. Research status and development of stalk leafy vegetable harvester. Agric. Eng. Equip. 2020, 47, 20–26. [Google Scholar]
- Li, Y.; Liu, H. Current situation and development trend of hydroponic vegetable technology. Agric. Eng. Technol. 2018, 38, 9–15. [Google Scholar] [CrossRef]
- Gao, G.; Wang, T. Design of aeroponics greenhouse vegetable harvester harvesting mechanism. J. Agric. Mech. Res. 2015, 37, 91–97. [Google Scholar] [CrossRef]
- Mo, H.; Xu, C.; Zhang, S.; Chen, L.; Cui, Y. Design and test of hydroponic cream lettuce harvesting device. J. Agric. Mech. Res. 2021, 43, 89–93. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, C.; Cui, Y.; Fu, L.; Liu, H.; Yang, C. Design and test of harvester for whole hydroponic lettuce with low damage. Trans. Chin. Soc. Agric. Mach. 2019, 50, 162–169. [Google Scholar] [CrossRef]
- Li, K. Study on the Design and Parameter Optimization of the Harvesting Device for Industrialized Shanghaiqing. Master’s Thesis, Southwest University, Chongqing, China, 2020. [Google Scholar]
- Xu, P.; Zhang, J.; He, F.; Li, K. Design and experiment of an automatic harvester for hydroponic leafy vegetables cultivated in Pipeline. Agric. Eng. Technol. 2021, 41, 47–51. [Google Scholar] [CrossRef]
- Cho, S.I.; Chang, S.J.; Kim, Y.Y.; An, K.J. AE—Automation and Emerging Technologies. Biosyst. Eng. 2002, 82, 143–149. [Google Scholar] [CrossRef]
- Arad, B.; Balendonck, J.; Barth, R.; Ben-Shahar, O.; Edan, Y.; Hellström, T.; Hemming, J.; Kurtser, P.; Ringdahl, O.; Tielen, T.; et al. Development of a Sweet Pepper Harvesting Robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; van Tuijl, B.A.J.; Barth, R.; Wais, E.; van Henten, E.J. Performance evaluation of a harvesting robot for sweet pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Kuznetsova, A.; Maleva, T.; Soloviev, V. Using YOLOv3 algorithm with pre- and post-processing for apple detection in Fruit-Harvesting Robot. Agronomy 2020, 10, 1016. [Google Scholar] [CrossRef]
- Onishi, Y.; Yoshida, T.; Kurita, H.; Fukao, T.; Arihara, H.; Iwai, A. An automated fruit harvesting robot by using deep learning. Robomech J. 2019, 6, 1–8. [Google Scholar] [CrossRef]
- Wang, D.; Su, R.; Xiong, Y.; Wang, Y.; Wang, W. Sugarcane-Seed-Cutting System Based on Machine Vision in Pre-Seed Mode. Sensors 2022, 22, 8430. [Google Scholar] [CrossRef]
- Jayagopal, P.; Rajendran, S.; Mathivanan, S.K.; Sathish Kumar, S.D.; Raja, K.T.; Paneerselvam, S. Identifying region specific seasonal crop for leaf borne diseases by utilizing deep learning techniques. Acta. Geophys. 2022, 70, 2841–2854. [Google Scholar] [CrossRef]
- Chen, R. Pigment Formation Physiology and Environment Regulation of the Flower Stalk in Chinese Kale. Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, China, 2015. [Google Scholar]
- Chen, Z. Identification of Heat Tolerance and Heat Resistant Material Screening in Chinese Kale. Master’s Thesis, South China Agricultural University, Guangzhou, China, 2017. [Google Scholar]
- Ministry of Agriculture of the People’s Republic of China. NY/T 1064-2006 Grade Specifications for Chinese Kale; Agricultural Publishing House: Beijing, China, 2006. [Google Scholar]
- Gao, W. Studies on Manipulator of Taking and Transporting Apples in Packing Domain. Master’s Thesis, Northwest A&F University, Xianyang, China, 2006. [Google Scholar]
- Cheng, P. Research on Design of Automatic Assembly Line of Iron Shell Motor. Master’s Thesis, Zhejiang University of Technology, Hangzhou, China, 2019. [Google Scholar]
- Xia, H.M.; Liu, Y.J.; Zhen, W.B.; Zhao, K.D.; Chen, Y.; Jiang, L.H. A Type of Device and Method for Harvesting Hydroponic Leafy Vegetables Cultivated in Pipeline. CNZL 202011144353.0, 31 August 2021. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Maximum | Minimum | Mean Value | Standard Deviation | Coefficient of Variation |
|---|---|---|---|---|---|
| The median diameter of the grabbable area (mm) | 16.60 | 7.20 | 11.06 | 2.25 | 0.20 |
| Height of grabbable area (mm) | 42.59 | 4.01 | 25.03 | 8.40 | 0.34 |
| Total mass (g) | 93.80 | 39.30 | 65.70 | 12.22 | 0.19 |
| Number of Iterations | Finger Length lAB (mm) | Finger Deflection β (°) | Grasping Error Ek (mm) |
|---|---|---|---|
| 1 | 55 | 117.6 | 1.69 |
| 2 | 60 | 115.1 | 1.49 |
| 3 | 65 | 113.0 | 1.34 |
| 4 | 70 | 111.3 | 1.22 |
| 5 | 75 | 109.8 | 1.12 |
| 6 | 80 | 108.5 | 1.03 |
| 7 | 85 | 107.4 | 0.96 |
| 8 | 90 | 106.4 | 0.90 |
| 9 | 95 | 105.5 | 0.84 |
| 10 | 100 | 104.7 | 0.79 |
| 11 | 105 | 104.0 | 0.75 |
| 12 | 110 | 103.4 | 0.71 |
| 13 | 115 | 102.8 | 0.68 |
| 14 | 120 | 102.2 | 0.65 |
| 15 | 125 | 101.7 | 0.62 |
| 16 | 130 | 101.3 | 0.59 |
| 17 | 135 | 100.9 | 0.57 |
| 18 | 140 | 100.5 | 0.55 |
| 19 | 145 | 100.1 | 0.53 |
| 20 | 150 | 99.8 | 0.51 |
| Factor | Initial Position Pi | Initial Inclination Angle Φo (°) | Finger Deflection Speed ω (° s−1) | |
|---|---|---|---|---|
| Level | ||||
| 1 | P1 | 30~45 | 20 | |
| 2 | P2 | 45~60 | 40 | |
| 3 | P3 | 60~75 | 60 | |
| 4 | P4 | 75~90 | 80 | |
| 5 | P5 | 100 | ||
| 6 | P6 | |||
| 7 | P7 | |||
| 8 | P8 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Xia, H.; Feng, J.; Jiang, L.; Li, L.; Dong, Z.; Zhao, K.; Zhang, J. An Enveloping, Centering, and Grabbing Mechanism for Harvesting Hydroponic Leafy Vegetables Cultivated in Pipeline. Agronomy 2023, 13, 476. https://doi.org/10.3390/agronomy13020476
Liu Y, Xia H, Feng J, Jiang L, Li L, Dong Z, Zhao K, Zhang J. An Enveloping, Centering, and Grabbing Mechanism for Harvesting Hydroponic Leafy Vegetables Cultivated in Pipeline. Agronomy. 2023; 13(2):476. https://doi.org/10.3390/agronomy13020476
Chicago/Turabian StyleLiu, Yuanjie, Hongmei Xia, Junjie Feng, Linhuan Jiang, Liuquan Li, Zhao Dong, Kaidong Zhao, and Jiamou Zhang. 2023. "An Enveloping, Centering, and Grabbing Mechanism for Harvesting Hydroponic Leafy Vegetables Cultivated in Pipeline" Agronomy 13, no. 2: 476. https://doi.org/10.3390/agronomy13020476
APA StyleLiu, Y., Xia, H., Feng, J., Jiang, L., Li, L., Dong, Z., Zhao, K., & Zhang, J. (2023). An Enveloping, Centering, and Grabbing Mechanism for Harvesting Hydroponic Leafy Vegetables Cultivated in Pipeline. Agronomy, 13(2), 476. https://doi.org/10.3390/agronomy13020476