
Detection of Soybean Insect Pest and a Forecasting Platform Using Deep Learning with Unmanned Ground Vehicles


 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Planting and Management for the Field Experiment
2.2. Video Recording Device for Data Accumulation
2.3. Unmanned Ground Vehicle
2.4. Image-Based Soybean Insect Pest Recognition
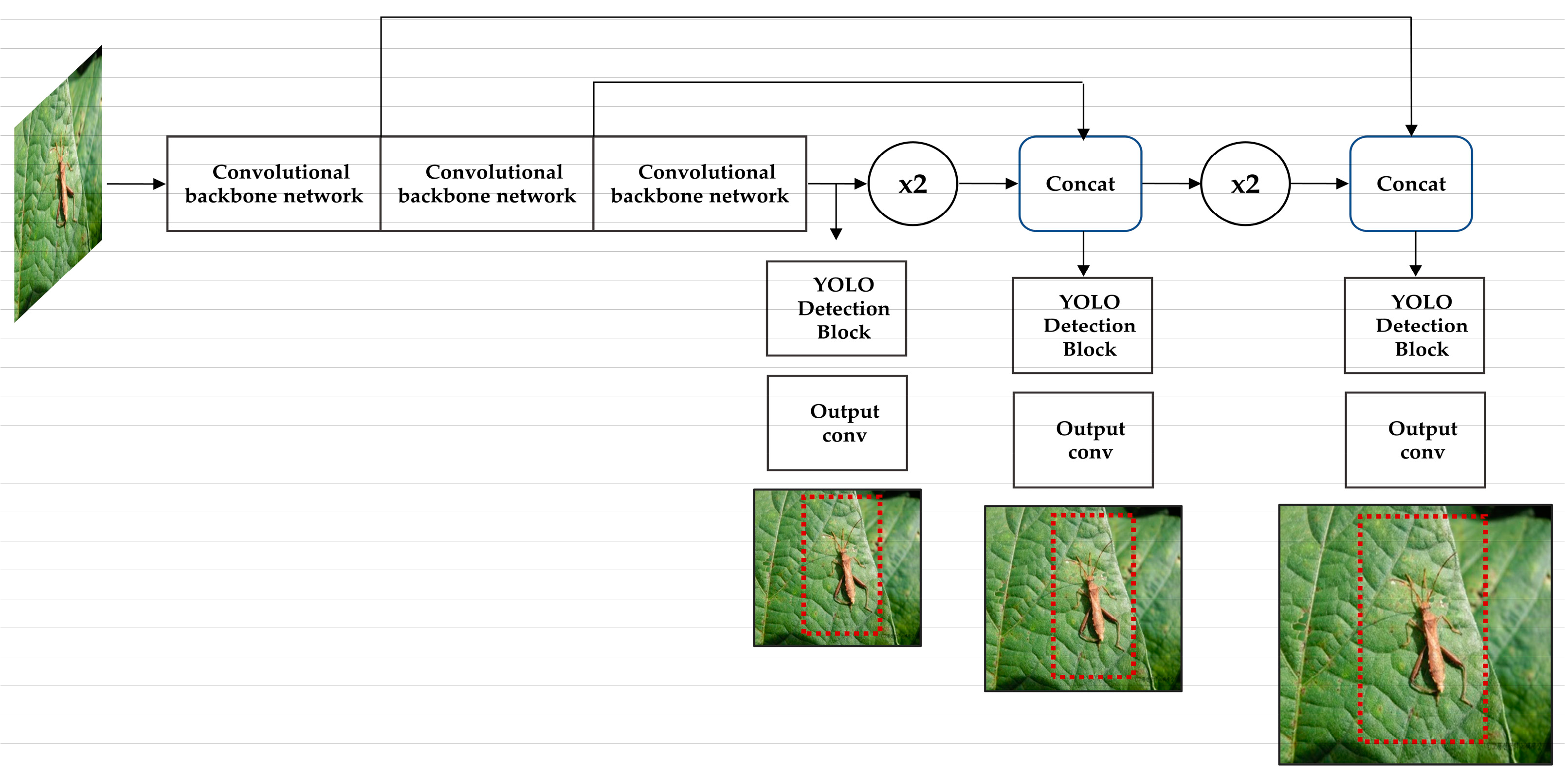
2.5. Object Detection Model
2.6. Web Application for Portable Object Detection
3. Results
3.1. Dataset
3.2. Evaluation of Loss Score for Iterations in AI Learning
3.3. Object Detection Output of R. pedestris
3.4. App-Based R. Pedestris Object Detection Model
4. Discussion
5. Conclusions and Future Research
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jung, J.K.; Seo, B.Y.; Moon, J.K.; Park, J.H. Oviposition preference of the bean bug, Riptortus clavatus (Thunberg) (Hemiptera: Alydidae), on soybean and mungbean plants. Korean J. Appl. Entomol. 2008, 47, 379–383. [Google Scholar] [CrossRef]
- Lim, U.T. Occurrence and control method of Riptortus pedestris (Hemiptera: Alydidae): Korean perspectives. Korean J. Appl. Entomol. 2013, 52, 437–448. [Google Scholar] [CrossRef]
- Paik, C.H.; Lee, G.H.; Choi, M.Y.; Seo, H.Y.; Kim, D.H.; Hwang, C.Y.; Kim, S.S. Status of the occurrence of insect pests and their natural enemies in soybean fields in Honam province. Korean J. Appl. Entomol. 2007, 46, 275–280. [Google Scholar] [CrossRef]
- Ghahari, H.; Carpintero, D.L.; Moulet, P.; Linnvuori, R.E.; Ostovan, H. Annotated catalogue of the Iranian broad-headed bugs (Hemiptera: Heteroptera: Alydidae). Acta Entomol. Musei Natl. Pragae 2010, 50, 425–436. [Google Scholar]
- Kang, C.H. Review on true bugs infesting tree fruits, upland crops, and weeds in Korea. J. Appl. Entomol. 2003, 4, 269–277. [Google Scholar]
- Seo, M.J.; Kwon, H.R.; Yoon, K.S.; Kang, M.A.; Park, M.W.; Jo, S.H.; Shin, H.S.; Kim, S.H.; Kang, E.G.; Yu, Y.M.; et al. Seasonal occurrence, development, and preference of Riptortus pedestris on hairy vetch. Korean J. Appl. Entomol. 2011, 50, 47–53. [Google Scholar] [CrossRef]
- Kikuchi, A. A simple rearing method of Piezodorus hybneri Gmelin and Riptortus clavatus Thunberg (Hemiptera: Pentatomidae, Alydidae), supplying dried seeds. Bull. Natl. Agric. Res. Cent. 1986, 6, 33–42. [Google Scholar]
- Kwon, H.R.; Kim, S.H.; Park, M.W.; Jo, S.H.; Shin, H.S.; Cho, H.S.; Youn, Y.N. Environmentally-friendly control of Riptortus pedestris (Hemiptera: Alydidae) by environmental friendly agricultural materials. Korean J. Agric. Sci. 2011, 38, 413–419. [Google Scholar]
- Numata, H. Environmental factors that determine the seasonal onset and termination of reproduction in seed-sucking bugs (Heteroptera) in Japan. Appl. Entomol. Zool. 2004, 39, 565–573. [Google Scholar] [CrossRef]
- Ahn, Y.J.; Kim, G.H.; Cho, K.Y. Susceptibility of embryonic and postembryonic developmental stages of Riptortus clavatus (Hemiptera: Alydidae) to diflubenzuron. Korean J. Appl. Entomol. 1992, 31, 480–485. [Google Scholar]
- Yasuda, T.; Mizutani, N.; Endo, N.; Fukuda, T.; Matsuyama, T.; Ito, K.; Moriya, S.; Sasaki, R. A new component of attractive aggregation pheromone in the bean bug, Riptortus clavatus (Thunberg) (Heteroptera: Alydidae). Appl. Entomol. Zool. 2007, 42, 1–7. [Google Scholar] [CrossRef]
- Kikuchi, Y.; Hayatsu, M.; Hosokawa, T.; Nagayama, A.; Tago, K.; Fukatsu, T. Symbiont-mediated insecticide resistance. Proc. Natl. Acad. Sci. USA 2012, 109, 8618–8622. [Google Scholar] [CrossRef]
- Bae, S.D.; Kim, H.J.; Lee, G.H.; Park, S.T. Development of observation methods for density of stink bugs in soybean field. Korean J. Appl. Entomol. 2007, 46, 153–158. [Google Scholar] [CrossRef]
- Geissmann, Q.; Abram, P.K.; Wu, D.; Haney, C.H.; Carrillo, J. Sticky Pi, an AI-powered smart insect trap for community chronoecology. bioRxiv 2021. [Google Scholar] [CrossRef]
- Available online: https://github.com/matterport/Mask_RCNN.git (accessed on 18 January 2023).
- Available online: https://pjreddie.com/darknet/yolo/ (accessed on 18 January 2023).
- Available online: https://github.com/facebookresearch/detectron2.git (accessed on 18 January 2023).
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Li, W.; Chen, P.; Wang, B.; Xie, C. Automatic localization and count of agricultural crop pests based on an improved deep learning pipeline. Sci. Rep. 2019, 9, 1–11. [Google Scholar] [CrossRef]
- Shen, Y.; Zhou, H.L.; Li, J.G.; Jian, F.J.; JayasYoun, D.S. Detection of stored-grain insects using deep learning. Comput. Electron. Agric. 2018, 145, 319–325. [Google Scholar] [CrossRef]
- Khalifa, N.E.M.; Mohamed, L.; Mohamed, H.N.T. Insect pests recognition based on deep transfer learning models. J. Theor. Appl. Inf. Technol. 2020, 98, 60–68. [Google Scholar]
- He, Y.; Zeng, H.; Fan, Y.; Ji, S.; Wu, J. Application of deep learning in integrated pest management: A real-time system for detection and diagnosis of oilseed rape pests. Mob. Inf. Syst. 2019, 2019, 4570808. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef]
- Roy, A.M.; Jayabrata, B. A deep learning enabled multi-class plant disease detection model based on computer vision. AI 2021, 2, 413–428. [Google Scholar] [CrossRef]
- Roy, A.M.; Rikhi, B.; Jayabrata, B. A fast accurate fine-grain object detection model based on YOLOv4 deep neural network. Neural Comput. Appl. 2022, 34, 3895–3921. [Google Scholar] [CrossRef]
- Roy, A.M.; Jayabrata, B. Real-time growth stage detection model for high degree of occultation using DenseNet-fused YOLOv4. Comput. Electron. Agric. 2022, 193, 106694. [Google Scholar] [CrossRef]
- Roy, A.M.; Bhaduri, J.; Kumar, T.; Raj, K. WilDect-YOLO: An efficient and robust computer vision-based accurate object localization model for automated endangered wildlife detection. Ecol. Inform. 2022, 2022, 101919. [Google Scholar] [CrossRef]
- Xianbao, C.; Guihua, Q.; Yu, J.; Zhaomin, Z. An improved small object detection method based on Yolo V3. Pattern Anal. Appl. 2021, 24, 1347–1355. [Google Scholar] [CrossRef]
- Liu, M.; Wang, X.; Zhou, A.; Fu, X.; Ma, Y.; Piao, C. Uav-yolo: Small object detection on unmanned aerial vehicle perspective. Sensors 2020, 20, 2238. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.; Jongmin, J.; Sungho, K. ECAP-YOLO: Efficient Channel Attention Pyramid YOLO for Small Object Detection in Aerial Image. Remote Sens. 2021, 13, 4851. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Nam, S.-W.; Young-Shik, K. Discharge variation of perforated hoses and drip irrigation systems for protected cultivation. Prot. Hortic. Plant Fact. 2007, 16, 297–302. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar]
- Farhadi, A.; Joseph, R. Yolov3: An incremental improvement. In Computer Vision and Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Gerovichev, A.; Sadeh, A.; Winter, V.; Bar-Massada, A.; Keasar, T.; Keasar, C. High throughput data acquisition and deep learning for insect ecoinformatics. Front. Ecol. Evol. 2021, 9, 309. [Google Scholar] [CrossRef]
- Vogel, P.; Klooster, T.; Andrikopoulos, V.; Lungu, M. A low-effort analytics platform for visualizing evolving Flask-based Python web services. In Proceedings of the 2017 IEEE Working Conference on Software Visualization (VISSOFT), Shanghai, China, 18–19 September 2017. [Google Scholar]
- Eby, P.J. Python Web Server Gateway Interface v1. 0. Línea]. Available online: https://www.python.org/dev/peps/pep-0333/ (accessed on 18 January 2023).
- Chesneau, B. Gunicorn. Available online: https://docs.gunicorn.org/en/latest/index.html# (accessed on 18 January 2023).
- Oh, Y.J.; Cho, S.K.; Kim, K.H.; Paik, C.H.; Cho, Y.; Kim, H.S.; Kim, T.S. Responses of Growth Characteristics of Soybean [Glycine max (L.) Merr.] Cultivars to Riptortus clavatus Thunberg (Hemiptera: Alydidae). Korean J. Breed. Sci. 2009, 41, 488–495. [Google Scholar]
- Wada, T.; Nobuyuki, E.; Masakazu, T. Reducing seed damage by soybean bugs by growing small-seeded soybeans and delaying sowing time. Crop Prot. 2006, 25, 726–731. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, Y.; Shannon, J.G.; Park, S.; Choung, M.; Hwang, Y. Agronomic characteristics of small-seeded RILs derived from Eunhakong (Glycine max) × KLG10084 (G. soja). Korean J. Breed. 2005, 37, 288–294. [Google Scholar]
- Kashyap, P.K.; Kumar, S.; Jaiswal, A.; Prasad, M.; Gandomi, A.H. Towards Precision Agriculture: IoT-enabled Intelligent Irrigation Systems Using Deep Learning Neural Network. IEEE Sens. J. 2021, 21, 17479–17491. [Google Scholar] [CrossRef]
- Machleb, J.; Peteinatos, G.G.; Sökefeld, M.; Gerhards, R. Sensor-Based Intrarow Mechanical Weed Control in Sugar Beets with Motorized Finger Weeders. Agronomy 2021, 11, 1517. [Google Scholar] [CrossRef]
- Palumbo, M.; D’Imperio, M.; Tucci, V.; Cefola, M.; Pace, B.; Santamaria, P.; Parente, A.; Montesano, F.F. Sensor-Based Irrigation Reduces Water Consumption without Compromising Yield and Postharvest Quality of Soilless Green Bean. Agronomy 2021, 11, 2485. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018. [Google Scholar] [CrossRef]
- Saiz-Rubio, V.; Francisco, R.-M. From smart farming towards agriculture 5.0: A review on crop data management. Agronomy 2020, 10, 207. [Google Scholar] [CrossRef]
- Lee, D.-H.; Hyeon-Jin, K.; Jong-Hwa, P. UAV, a Farm Map, and Machine Learning Technology Convergence Classification Method of a Corn Cultivation Area. Agronomy 2021, 11, 1554. [Google Scholar] [CrossRef]
- Lan, Y.; Qian, S.; Chen, S.; Zhao, Y.; Deng, X.; Wang, G.; Zang, Y.; Wang, J.; Qiu, X. Influence of the Downwash Wind Field of Plant Protection UAV on Droplet Deposition Distribution Characteristics at Different Flight Heights. Agronomy 2021, 11, 2399. [Google Scholar] [CrossRef]
- Pitla, S.; Bajwa, S.; Bhusal, S.; Brumm, T.; Brown-Brandl, T.M.; Buckmaster, D.R.; Thomasson, A. Ground and Aerial Robots for Agricultural Production: Opportunities and Challenges; CAST: Ames, IO, USA, 2020. [Google Scholar]
- Zheng, Y.; Lan, Y.; Xu, B.; Wang, Z.; Tan, Y.; Wang, S. Development of an UGV System for Measuring Crop Conditions in Precision Aerial Application. In Proceedings of the American Society of Agricultural and Biological Engineers, Kansas City, MO, USA, 21–24 July 2013; p. 1. [Google Scholar]
- Zhong, Y.; Gao, J.; Lei, Q.; Zhou, Y. A vision-based counting and recognition system for flying insects in intelligent agriculture. Sensors 2018, 18, 1489. [Google Scholar] [CrossRef]
- Shorten, C.; Taghi, M.K. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 1–48. [Google Scholar] [CrossRef]
- Champ, J.; Mora-Fallas, A.; Goëau, H.; Mata-Montero, E.; Bonnet, P.; Joly, A. Instance segmentation for the fine detection of crop and weed plants by precision agricultural robots. Appl. Plant Sci. 2020, 8, e11373. [Google Scholar] [CrossRef]
- Noskov, A.; Joerg, B.; Nicolas, F. A review of insect monitoring approaches with special reference to radar techniques. Sensors 2021, 21, 1474. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Training Set Size | Confidence Score | C/I 1 | mAP |
|---|---|---|---|---|
| Field (R1~R6) | 500 | 0.998 (0.114/0.0023) * | 0.994 (0.187/0.0038) | 0.952 |
| Field (R7~) | 500 | 0.958 (0.362/0.0074) | 0.794 (0.262/0.0053) | 0.716 |
| Laboratory | 500 | 0.971 (0.121/0.0025) | 0.842 (0.238/0.0049) | 0.873 |
| Images | Detect Time (Sec/Replication) | C/I | Confidence score |
|---|---|---|---|
| 25 | 79.0 (0.0111/2.3 × 10−4) * | 100 | 95.75 (0.0185/3.8 × 10−4) |
| 50 | 67.4 (0.0440/9.0 × 10−4) | 100 | 95.98 (0.0436/8.9 × 10−4) |
| 100 | 69.2 (0.0364/7.4 × 10−4) | 100 | 95.82 (0.0838/1.7 × 10−3) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, Y.-H.; Choi, S.H.; Kwon, Y.-J.; Kwon, S.-W.; Kang, Y.J.; Jun, T.-H. Detection of Soybean Insect Pest and a Forecasting Platform Using Deep Learning with Unmanned Ground Vehicles. Agronomy 2023, 13, 477. https://doi.org/10.3390/agronomy13020477
Park Y-H, Choi SH, Kwon Y-J, Kwon S-W, Kang YJ, Jun T-H. Detection of Soybean Insect Pest and a Forecasting Platform Using Deep Learning with Unmanned Ground Vehicles. Agronomy. 2023; 13(2):477. https://doi.org/10.3390/agronomy13020477
Chicago/Turabian StylePark, Yu-Hyeon, Sung Hoon Choi, Yeon-Ju Kwon, Soon-Wook Kwon, Yang Jae Kang, and Tae-Hwan Jun. 2023. "Detection of Soybean Insect Pest and a Forecasting Platform Using Deep Learning with Unmanned Ground Vehicles" Agronomy 13, no. 2: 477. https://doi.org/10.3390/agronomy13020477
APA StylePark, Y. -H., Choi, S. H., Kwon, Y. -J., Kwon, S. -W., Kang, Y. J., & Jun, T. -H. (2023). Detection of Soybean Insect Pest and a Forecasting Platform Using Deep Learning with Unmanned Ground Vehicles. Agronomy, 13(2), 477. https://doi.org/10.3390/agronomy13020477