
Realtime Picking Point Decision Algorithm of Trellis Grape for High-Speed Robotic Cut-and-Catch Harvesting


Abstract
:1. Introduction
- This paper proposed a three-dimensional ROI (ROI means the region of interest) containing a finite number of grapes divided for subsequent harvesting work using depth images and RGB images obtained using Realsense D455, with the model being developed according to the structure of the robot body and working parameters.
- In this paper, the SE-Net attention mechanism module and the distance threshold segmentation module were deeply integrated into the feature-enhanced YOLO v4-SE model with multi-channel inputs to realize the synchronous recognition of multi-target grapes in the three-dimensional ROI, including overlapping or occluded grapes and grapes imaged completely.
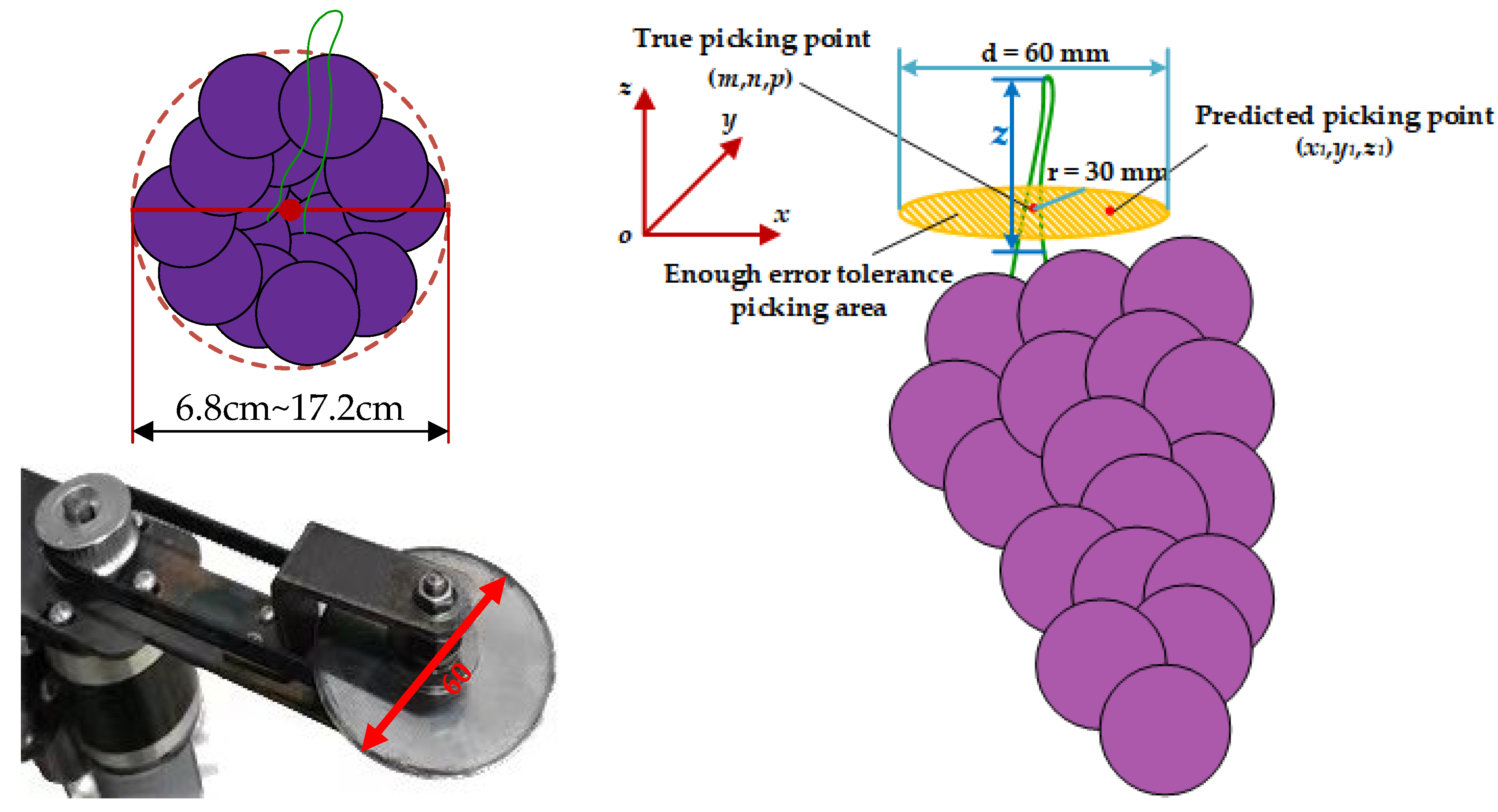
- After the synchronous recognition of multi-grapes, a method based on the inference from the center point of the prediction boxes was proposed for the rapid positioning of the grape stem picking point for the first time, combining a disc knife cutting end effector and the physical properties of the trellis grapes. It relied on Gaussian distance weights to plan the picking sequence in the three-dimensional ROI.
2. Materials and Methods
2.1. System Analysis
2.1.1. Technical Solution of the High-Speed Cut-and-Catch Robot
- (1)
- The distribution of ripe grapes is random and discrete; only relying on high-speed cut-and-catch machinery harvesting will affect work efficiency. It is necessary to plan the picking sequence first and then combine the high-speed cut-and-catch operation method to really improve work efficiency.
- (2)
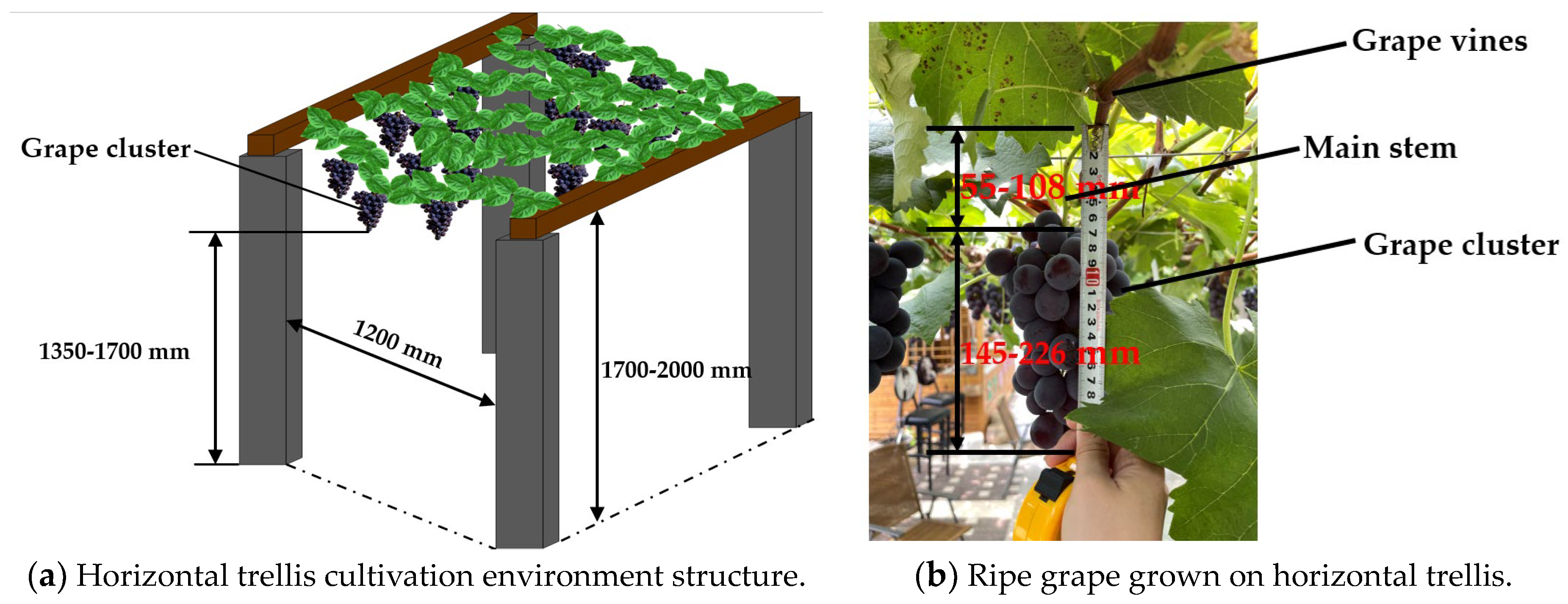
- The length of a main stem is generally between 5.5 cm and 10.8 cm after field investigation and measurement, which is ideal for high-speed cut-and-catch harvesting with a disc knife end effector. However, it is necessary to position the picking point of the stem to avoid damaging the grapes or colliding with the trellis in the height direction during the cutting process.
- (3)
- The terrain of the trellis vineyard is uneven, which will affect the working height of the disc knife cutting end effector. Thus, it is necessary to adjust the working height of the end effector by positioning the picking point, which can reduce working errors caused by uneven terrain.
2.1.2. Overall Visual Scheme
- (1)
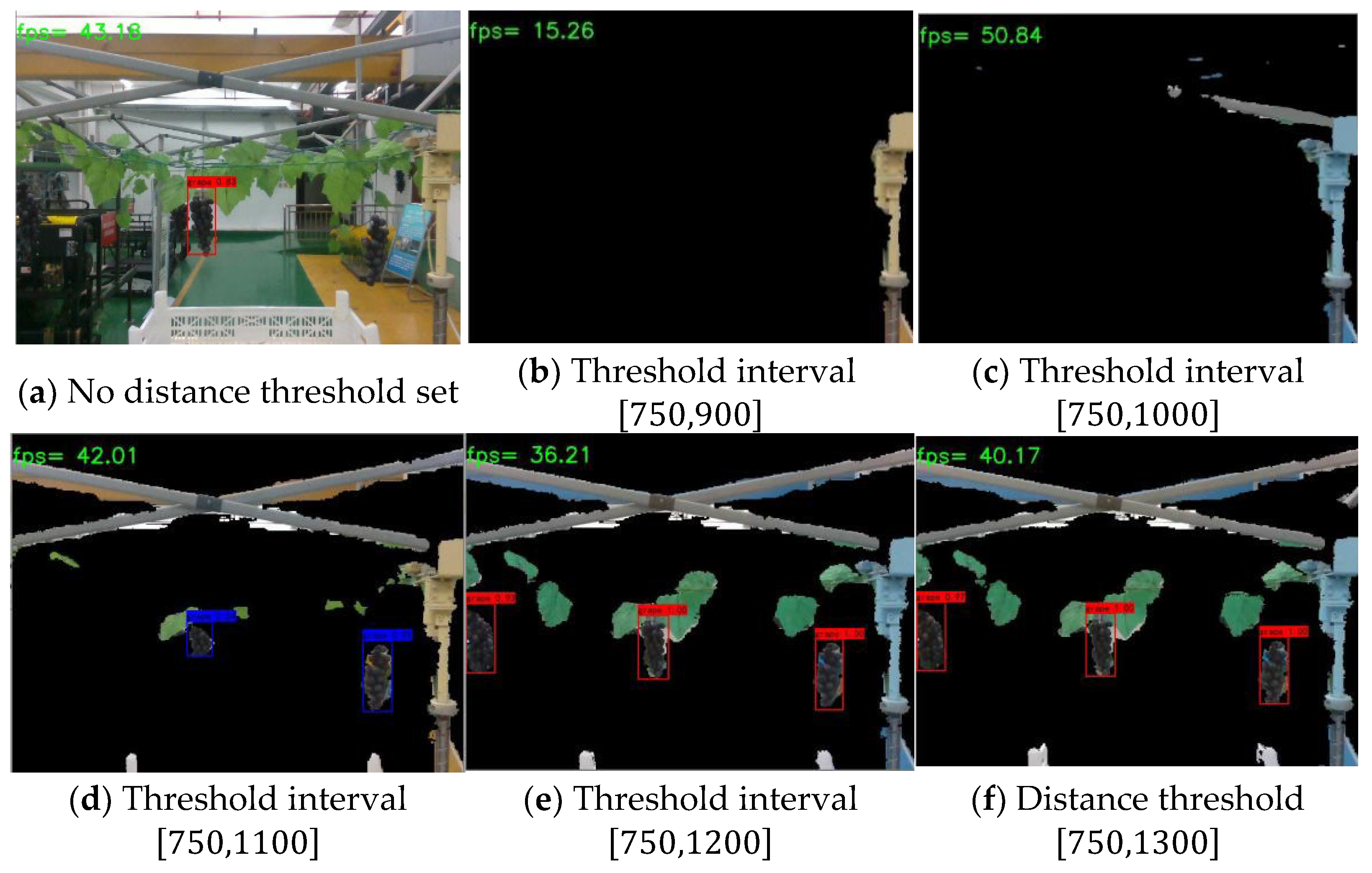
- Considering the working width limitations imposed by the trellis vineyard, the vertical profiling that avoids colliding with the trellis, and the elimination of interference of irrelevant and complex fruits, foreground, and background in the walking operation, this paper designs a three-dimensional ROI to achieve a robotic solution for continuous cutting and catching. This restricted harvest region containing only a finite quantity of grapes is the three-dimensional ROI for robotic harvesting.
- (2)
- The vision algorithm mainly includes the synchronous recognition of a finite quantity of grapes, the inference of picking points upwards along the fruit, global continuous picking sequence planning, and visual feedback, which all serve for the three-dimensional ROI, so as to realize high-speed continuous cutting and catching for the disc knife cutting end effector.
- (1)
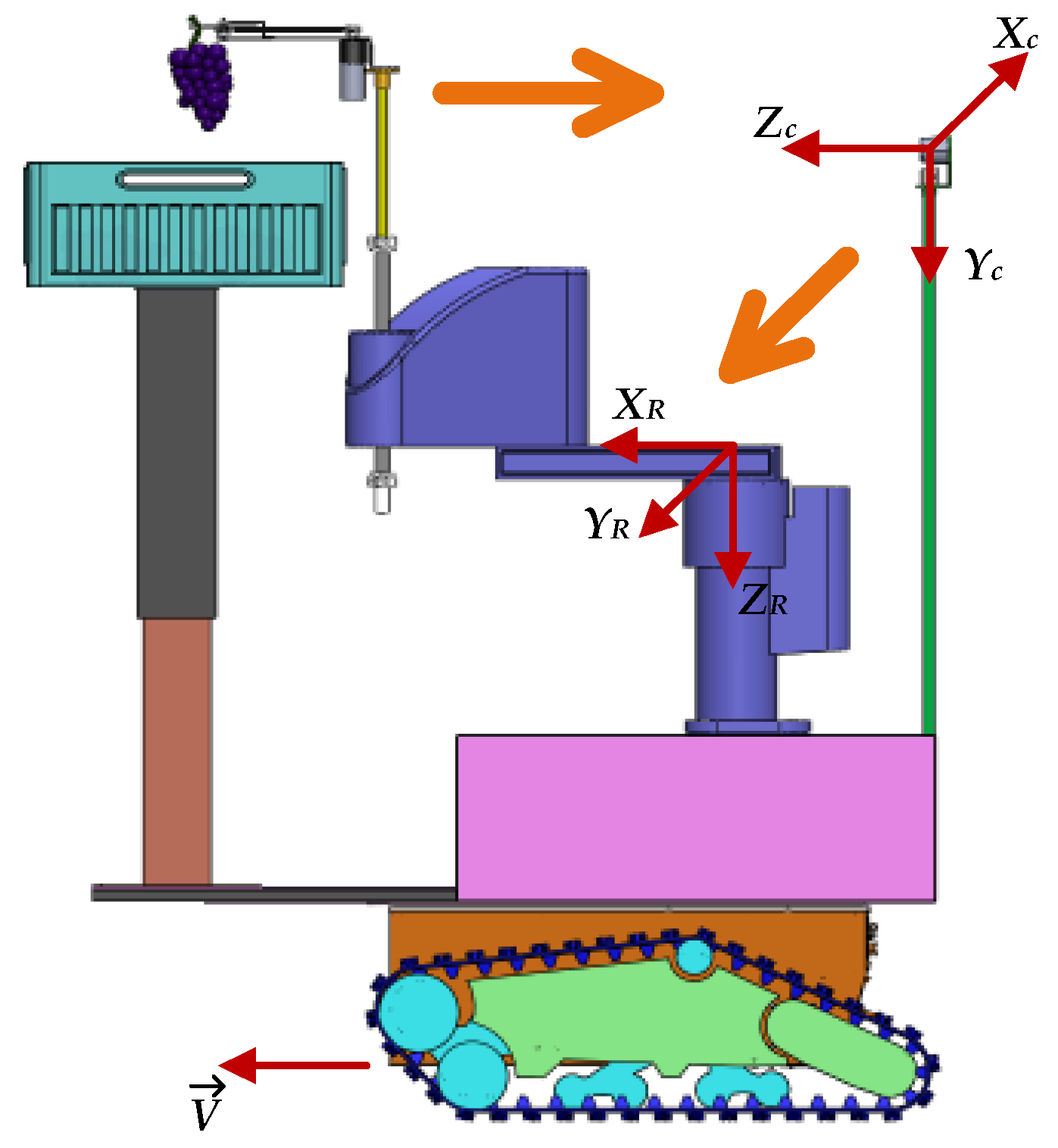
- Firstly, the regularity of fruit distribution, the structure of the robot body, and working parameters are determined using the trellis grape viticulture environment and the purpose of high-speed cutting and catching. The structure of the robot body is formed by mutual cooperation between the maximum working area of SCARA, the installation position and size of the fruit bin, and the features and working methods of the disc knife, which all help to clarify the relationship between Realsense D455 and the end effector.
- (2)
- Secondly, a three-dimensional ROI of a finite number of harvest grapes is marked out according to the above information. Then, a feature perception-enhanced model is used for the synchronous recognition of the trellis grapes in the three-dimensional ROI. The picking points of the multi-grapes are synchronously inferred upwards along the fruit recognition boxes.
- (3)
- Thirdly, the rough positioning of the picking points using the fusion of multi-dimensional information is confined to the cutting area with differences in three-dimensional directions, and then the picking points are calculated reliably and quickly based on the corner information.
- (4)
- Finally, picking points are sent to the PLC controller continuously on the basis of the global continuous picking sequence planned in the ROI area, and occluded and overlapping grapes are separated with the fusion of depth information during the process, which significantly helps to improve the efficiency of the cutting and catching robot.
2.2. System
2.2.1. System Architecture
2.2.2. “Eye-to-Hand” Configuration
2.2.3. Three-Dimensional ROI
2.3. Algorithm
2.3.1. Algorithm Structure
- (1)
- The multi-target grapes in the three-dimensional ROI can be synchronously identified, which is beneficial to the global continuous picking sequence established in the three-dimensional ROI.
- (2)
- The pixel coordinates of the picking point can be inferred by using the corner information of the prediction box output from the feature-enhanced deep learning model.
- (3)
- After the spatial coordinate transformation, according to the Gaussian distance weight and dual-indicator spatial coordinates that sort the picking point in the three-dimensional ROI, the global continuous picking sequence is planned.
2.3.2. Multivariate Image Acquisition
2.3.3. Feature-Enhanced Model for Synchronous Recognition of Trellis Grapes
2.3.4. Rough Positioning of Picking Points with Fusion of Depth Images and RGB Images
- (1)
- Accuracy requirements in the x and y directions:
- (2)
- Accuracy requirements in the z direction:
2.3.5. Real-Time Continuous Picking Sequence Planning in Three-Dimensional ROI for Multi-Grapes
3. Experimental Results and Discussion
3.1. Experimental Environment and Conditions
3.2. Feature-Enhanced Deep Learning Model Field Application
3.3. Field Positioning Accuracy Verification Test
3.4. Synchronous Harvesting Experiment in Field
3.5. Discussion
4. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, L.S.; Liu, H.Y. Discussion on the management and storage technology of grapes before and after picking. Rural. Econ. Sci. Technol. 2017, 28, 32. [Google Scholar]
- Liu, J.Z. Research Progress Analysis of Robotic Harvesting Technologies in Greenhouse. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–18. [Google Scholar]
- Xiong, Y.; Peng, C.; Grimstad, L. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Rong, J.; Wang, P.; Wang, T. Fruit pose recognition and directional orderly grasping strategies for tomato harvesting robots. Comput. Electron. Agric. 2022, 202, 107430. [Google Scholar] [CrossRef]
- Williams, H.A.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 3065386. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Pereira, C.S.; Morais, R.; Reis, M.J.C.S. Pixel-based leaf segmentation from natural vineyard images using color model and threshold techniques. In Proceedings of the International Conference Image Analysis and Recognition, Waterloo, ON, Canada, 27–29 August 2019; pp. 96–106. [Google Scholar] [CrossRef]
- Gong, L.; Wang, W.; Wang, T.; Liu, C. Robotic harvesting of the occluded fruits with a precise shape and position reconstruction approach. J. Field Robot. 2022, 39, 69–84. [Google Scholar] [CrossRef]
- Rong, J.; Zhou, H.; Zhang, F.; Yuan, T.; Wang, P. Tomato cluster detection and counting using improved YOLOv5 based on RGB-D fusion. Comput. Electron. Agric. 2023, 207, 107741. [Google Scholar] [CrossRef]
- Sun, Q.; Chai, X.; Zeng, Z.; Zhou, G.; Sun, T. Noise-tolerant RGB-D feature fusion network for outdoor fruit detection. Comput. Electron. Agric. 2022, 198, 107034. [Google Scholar] [CrossRef]
- Liu, S.; Whitty, M. Automatic grape bunch detection in vineyards with an SVM classifier. J. Appl. Log. 2015, 13, 643–653. [Google Scholar] [CrossRef]
- Xiong, J.; He, Z.; Tang, L.; Lin, R.; Liu, Z. Visual localization of disturbed grape. Picking Point in Non-structural Environment. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2017, 48, 29–33. [Google Scholar] [CrossRef]
- Luo, L.; Tang, Y.; Lu, Q.; Chen, X.; Zhang, P.; Zou, X. A vision methodology for harvesting robot to detect cutting points on peduncles of double overlapping grape clusters in a vineyard. Comput. Ind. 2018, 99, 130–139. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, P. A Fast and Efficient Recognition Method for Grape Picking Point. J. Agric. Mech. Res. 2020, 42, 189–193. [Google Scholar] [CrossRef]
- Peng, H.; Huang, B.; Shao, Y.; Li, Z.; Zhang, C.; Chen, Y. General improved SSD model for picking object recognition of multiple fruits in natural environment. Trans. Chin. Soc. Agric. Eng. 2018, 34, 155–162. [Google Scholar] [CrossRef]
- Zhao, D.; Wu, R.; Liu, X.; Zhao, Y. Apple positioning based on YOLO deep convolutional neural network for picking robot in complex background. Trans. Chin. Soc. Agric. Eng. 2019, 35, 172–181. [Google Scholar] [CrossRef]
- Liu, F.; Liu, Y.; Lin, S.; Guo, W.; Xu, F.; Zhang, B. Fast recognition method for tomatoes under complex environments based on improved YOLO. Trans. CSAM 2020, 51, 229–237. [Google Scholar] [CrossRef]
- Yan, B.; Fan, P.; Lei, X.; Liu, Z.; Yang, F. A real-time apple targets detection method for picking robot based on improved YOLOv5. Remote Sens. 2021, 13, 1619. [Google Scholar] [CrossRef]
- Jin, Y.C.; Yu, C.C.; Yin, J.J.; Simon, X.Y. Detection method for table grape ears and stems based on a far-close-range combined vision system and hand-eye-coordinated picking test. Comput. Electron. Agric. 2022, 202, 107364. [Google Scholar] [CrossRef]
- Luo, L.; Tang, Y.; Zou, X.; Ye, M.; Feng, W.; Li, G. Vision-based extraction of spatial information in grape clusters for harvesting robots. Biosyst. Eng. 2016, 151, 90–104. [Google Scholar] [CrossRef]
- Lei, W.; Lu, J. Visual positioning method for picking point of grape picking robot. Jiangsu J. Agric. Sci. 2020, 36, 29–33+81. [Google Scholar]
- Yin, W.; Wen, H.J.; Ning, Z.T.; Ye, J.; Dong, Z.Q.; Luo, L.F. Fruit detection and pose Estimation for Grape Cluster-Harvesting Robot Using Binocular Imagery Based on Deep Neural Networks. Front. Robot. AI 2021, 8, 626989. [Google Scholar] [CrossRef] [PubMed]
- Kalampokas, Τ.; Vrochidou, Ε.; Papakostas, G.A. Grape stem detection using regression convolutional neural networks. Comput. Electron. Agric. 2021, 186, 106220. [Google Scholar] [CrossRef]
- Li, H.; Li, C.; Li, G.; Chen, L.X. A real-time table grape detection method based on improved YOLO v4-tiny network in complex background. Biosyst. Eng. 2021, 212, 347–359. [Google Scholar] [CrossRef]
- Zhao, R.; Zhu, Y.; Li, Y. An end-to-end lightweight model for grape and picking point simultaneous detection. Biosyst. Eng. 2022, 223, 174–188. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Su, B.F.; Shen, L.; Chen, S.; Mi, Z.W. Multi-features Identification of Grape Cultivars Based on Attention Mechanism. Trans. Chin. Soc. Agric. Mach. 2021, 52, 226–233+252. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Ning, Z.T.; Luo, L.F.; Liao, J.X. Recognition and the optimal picking point location of grape stems based on deep learning. Trans. Chin. Soc. Agric. Eng. 2021, 37, 222–229. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Position | Related Hardware Parameters | Related Parameters of Horizontal Trellis Cultivated Grape | Vision Information |
|---|---|---|---|
| Far-range field of view |
|
| RGB and depth image information of grapes |
| Picking point |
| Pixel and spatial information of picking point | |
| |||
|
| mAP/% | Precision/% | Recall/% | F1 | |
|---|---|---|---|---|
| YOLO v4 | 93.87 | 93.43 | 93.58 | 0.93 |
| Faster R-CNN (resnet50) | 94.76 | 69.61 | 94.61 | 0.82 |
| YOLO X | 94.88 | 87.80 | 92.31 | 0.90 |
| YOLO v7 | 94.27 | 93.06 | 89.33 | 0.91 |
| YOLO v4-SE (Our) | 95.21 | 95.75 | 95.83 | 0.95 |
| Grape Bunches | Recognition Success Rate/% | Positioning Success Rate/% | Average Recognition Time/s | Average Positioning Time/s | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 0.085 | 0.075 | 2.58 | 2.06 | 1.32 | 7.16 |
| 2 | 100 | 100 | 0.091 | 0.081 | 2.55 | 1.83 | 1.09 | 7.85 |
| 3 | 100 | 88.9 | 0.082 | 0.095 | 2.36 | 2.02 | 1.44 | 7.59 |
| 4 | 91.7 | 91.7 | 0.093 | 0.086 | 2.83 | 2.08 | 1.67 | 8.85 |
| 5 | 93.3 | 86.7 | 0.081 | 0.084 | 2.67 | 2.07 | 1.37 | 7.00 |
| average | 97 | 93.5 | 0.0864 | 0.0842 | 2.598 | 2.012 | 1.378 | 7.69 |
| Recognition Success Rate/% | Positioning Success Rate/% | Collision | Harvesting Time/s | Picking Success Rate/% | Picking Speed/ | |
|---|---|---|---|---|---|---|
| 2 | 100 | 100 | × | 12.4 | 100 | 6.2 |
| 4 | 100 | 100 | × | 23.33 | 100 | 5.833 |
| 6 | 100 | 88.87 | × | 31.93 | 88.87 | 5.95 |
| 8 | 91.7 | 95.83 | √ | 44.97 | 91.67 | 6.14 |
| 10 | 93.3 | 83.33 | √ | 56.7 | 83.33 | 6.80 |
| average | 97 | 93.606 | - | - | 92.78 | 6.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Liu, J.; Wang, J.; Cai, L.; Jin, Y.; Zhao, S.; Xie, B. Realtime Picking Point Decision Algorithm of Trellis Grape for High-Speed Robotic Cut-and-Catch Harvesting. Agronomy 2023, 13, 1618. https://doi.org/10.3390/agronomy13061618
Xu Z, Liu J, Wang J, Cai L, Jin Y, Zhao S, Xie B. Realtime Picking Point Decision Algorithm of Trellis Grape for High-Speed Robotic Cut-and-Catch Harvesting. Agronomy. 2023; 13(6):1618. https://doi.org/10.3390/agronomy13061618
Chicago/Turabian StyleXu, Zhujie, Jizhan Liu, Jie Wang, Lianjiang Cai, Yucheng Jin, Shengyi Zhao, and Binbin Xie. 2023. "Realtime Picking Point Decision Algorithm of Trellis Grape for High-Speed Robotic Cut-and-Catch Harvesting" Agronomy 13, no. 6: 1618. https://doi.org/10.3390/agronomy13061618
APA StyleXu, Z., Liu, J., Wang, J., Cai, L., Jin, Y., Zhao, S., & Xie, B. (2023). Realtime Picking Point Decision Algorithm of Trellis Grape for High-Speed Robotic Cut-and-Catch Harvesting. Agronomy, 13(6), 1618. https://doi.org/10.3390/agronomy13061618