Three-Dimensional Point Cloud Reconstruction and Morphology Measurement Method for Greenhouse Plants Based on the Kinect Sensor Self-Calibration


Abstract
:1. Introduction
2. Materials and Methods
2.1. Structure and Principle of the Measurement System
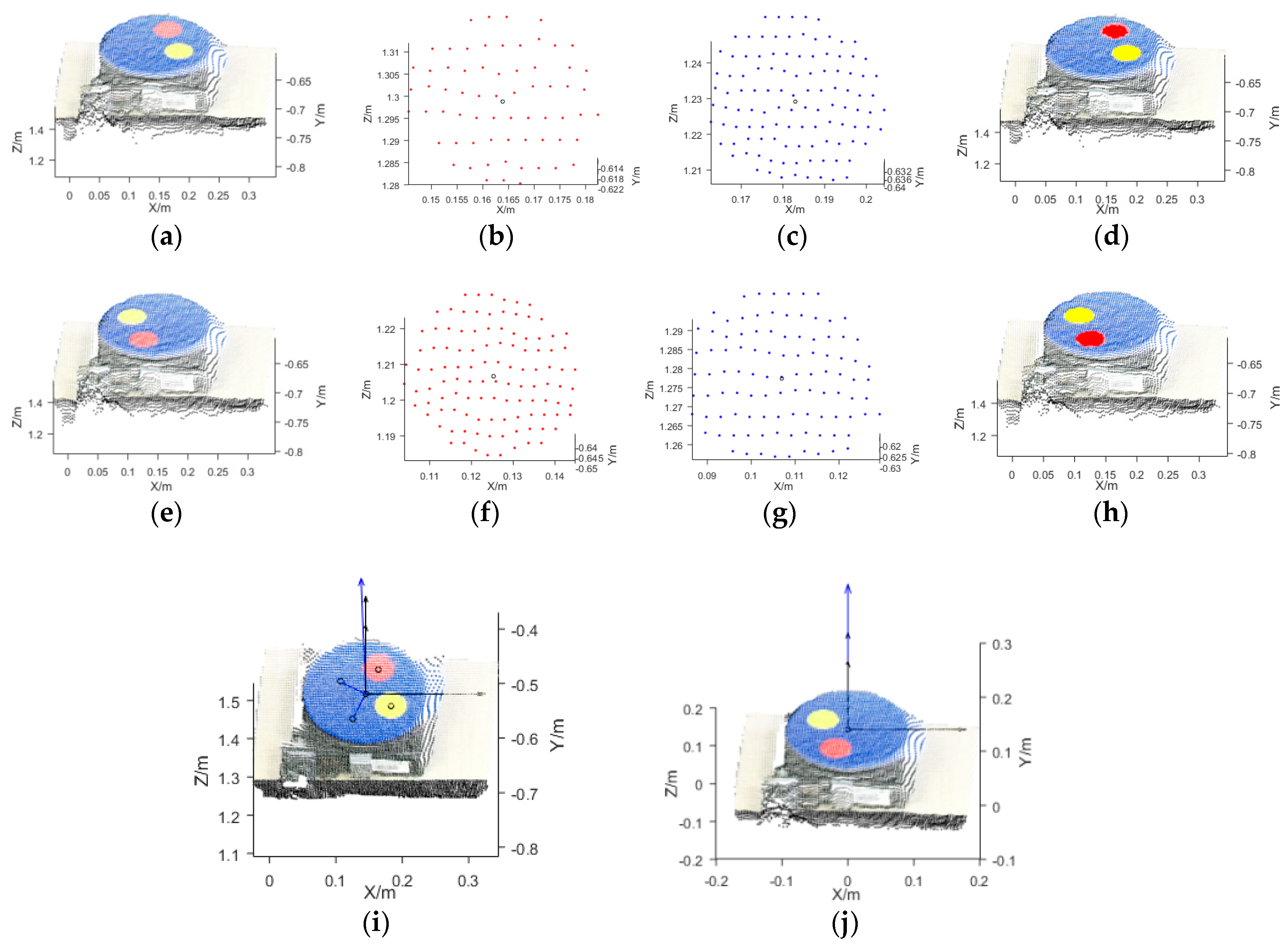
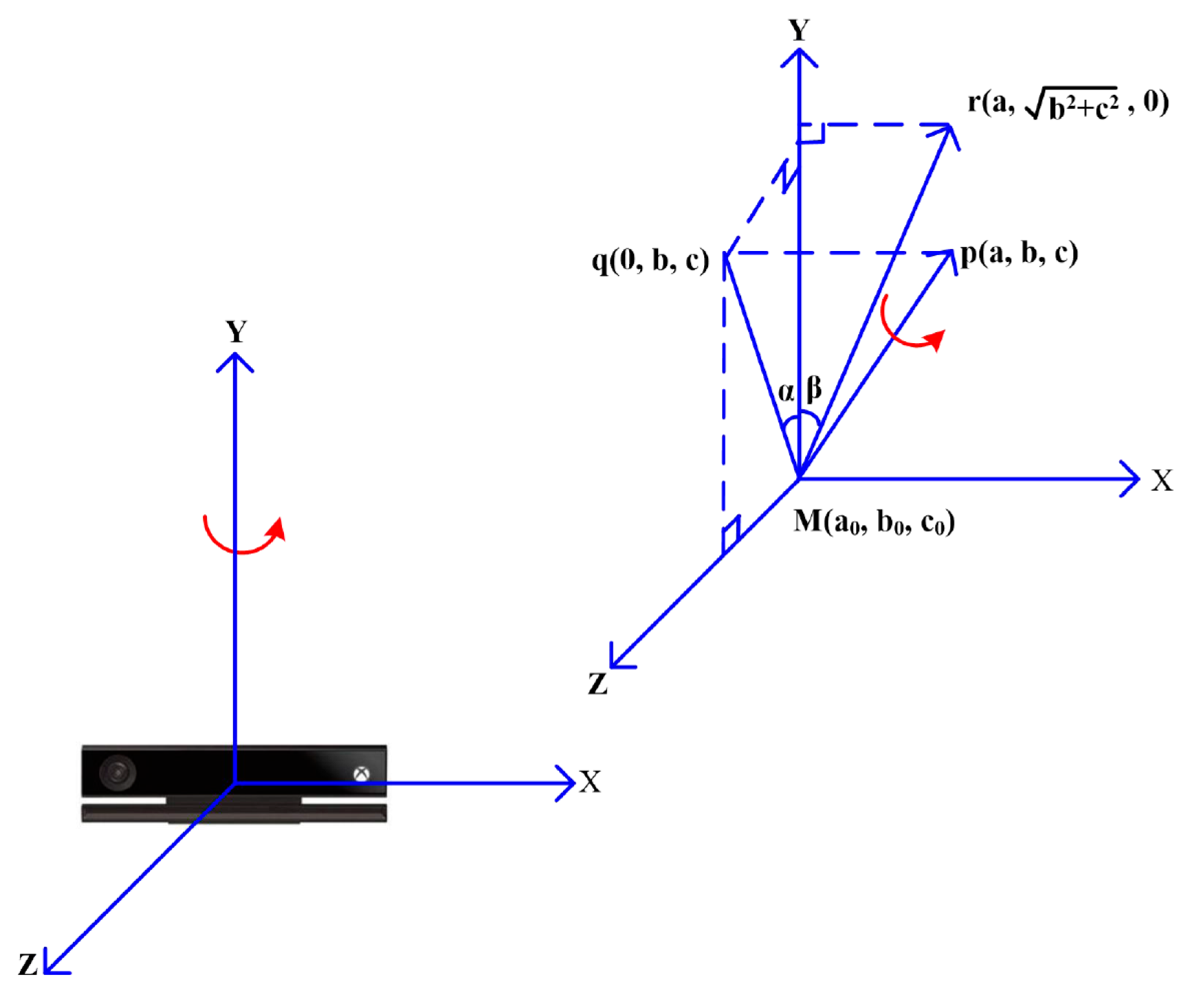
2.2. Autonomous Calibration of the Kinect Sensor Position
2.3. Experimental and Data Analysis
3. Results and Discussion
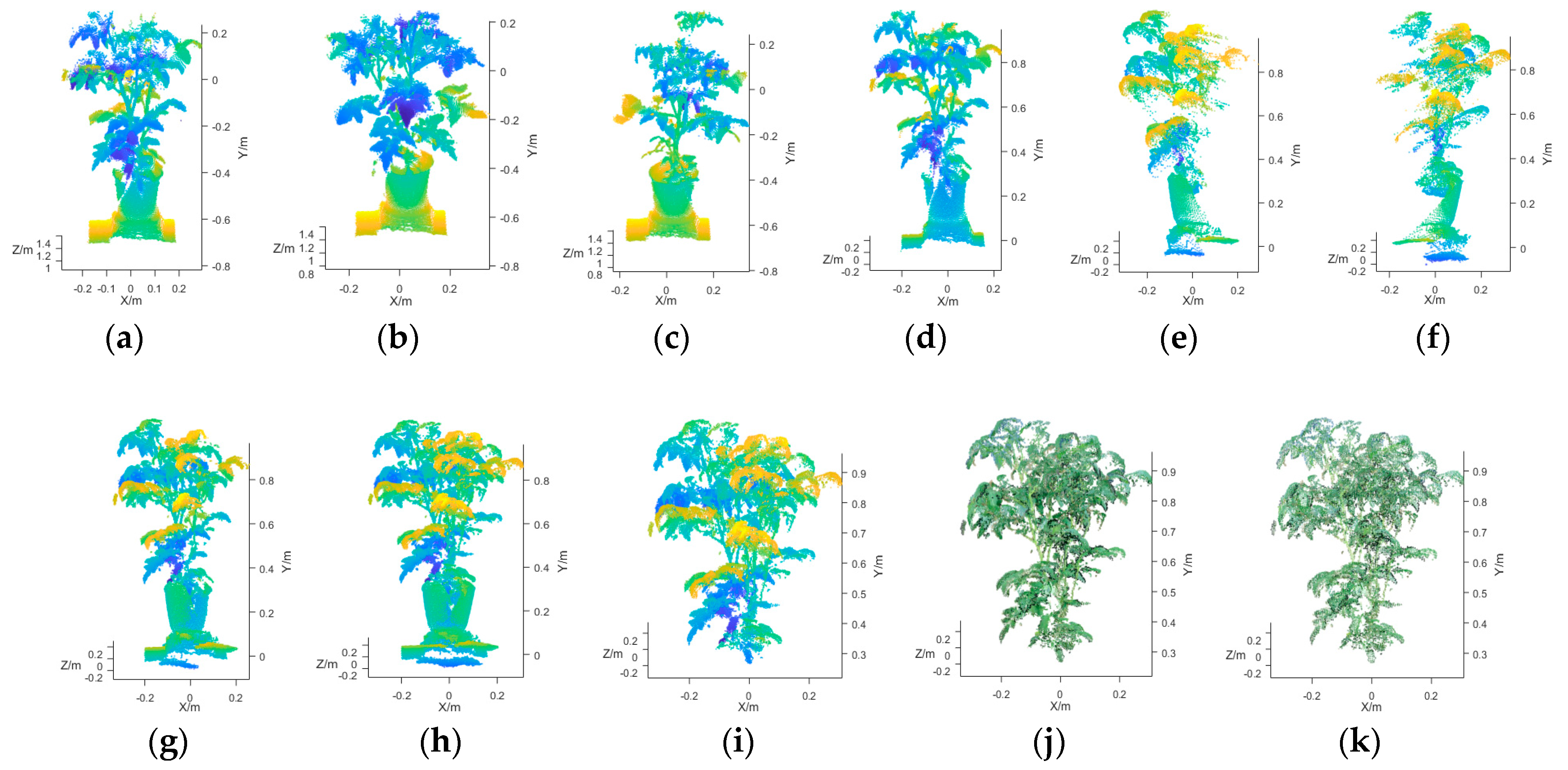
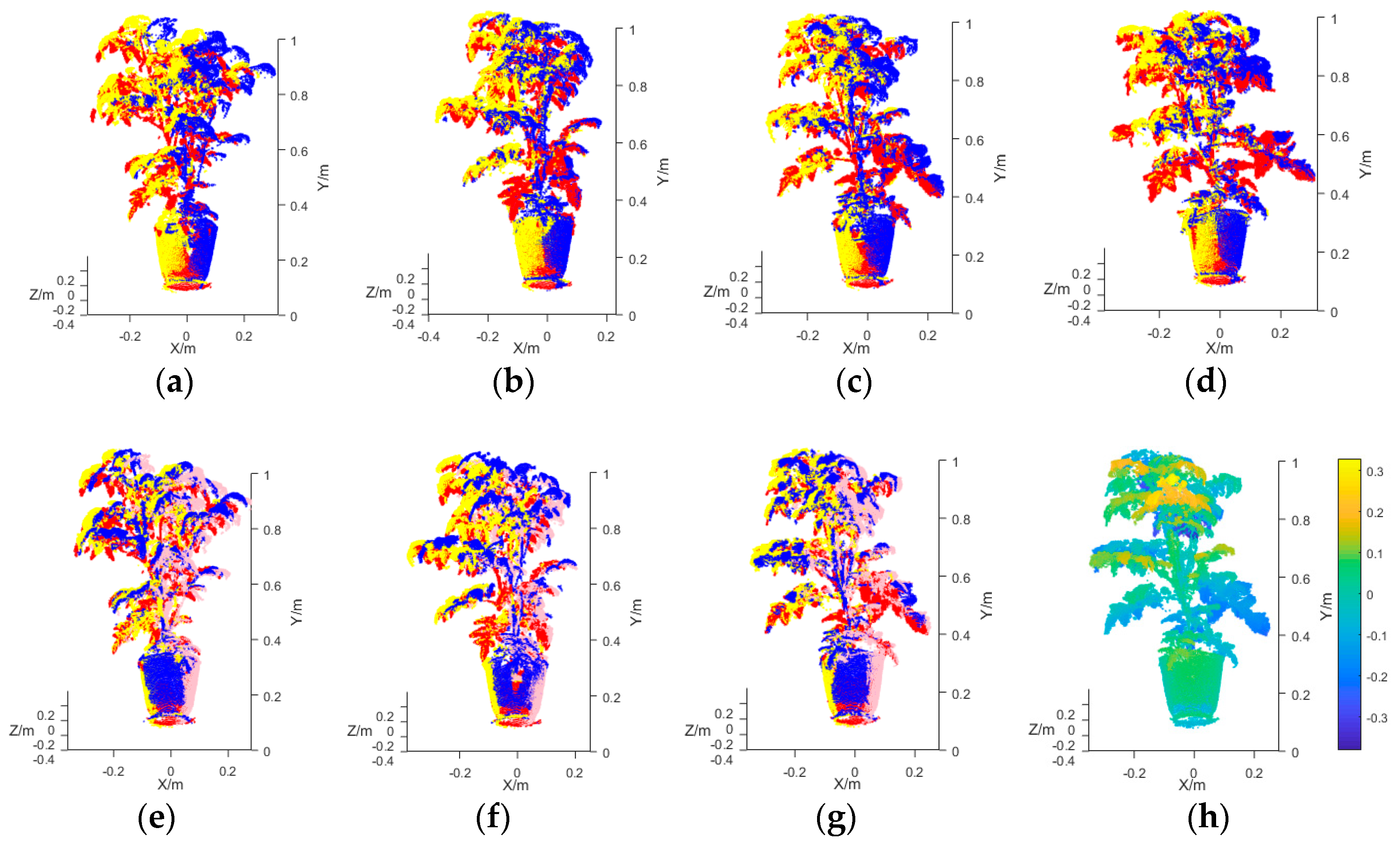
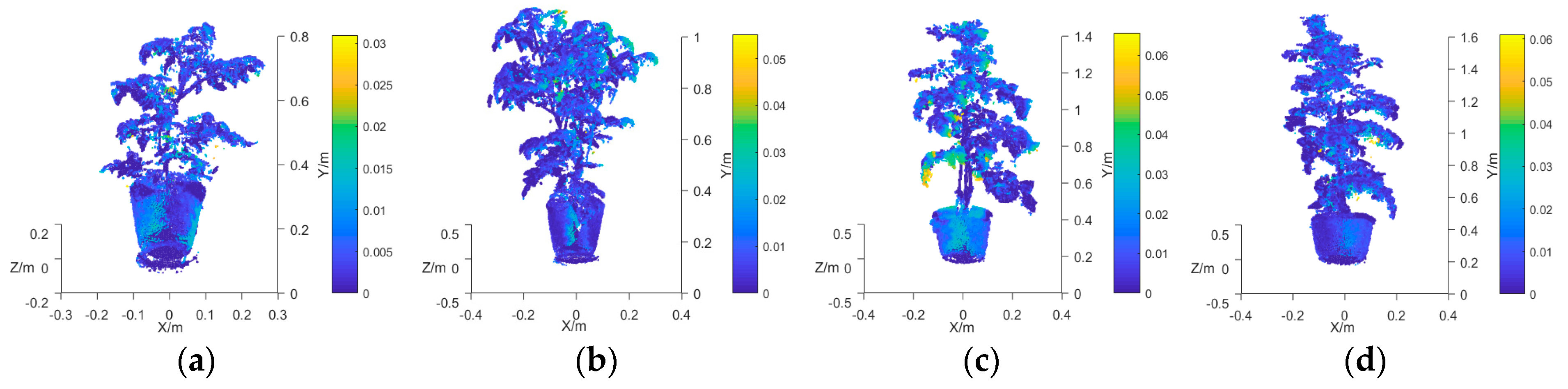
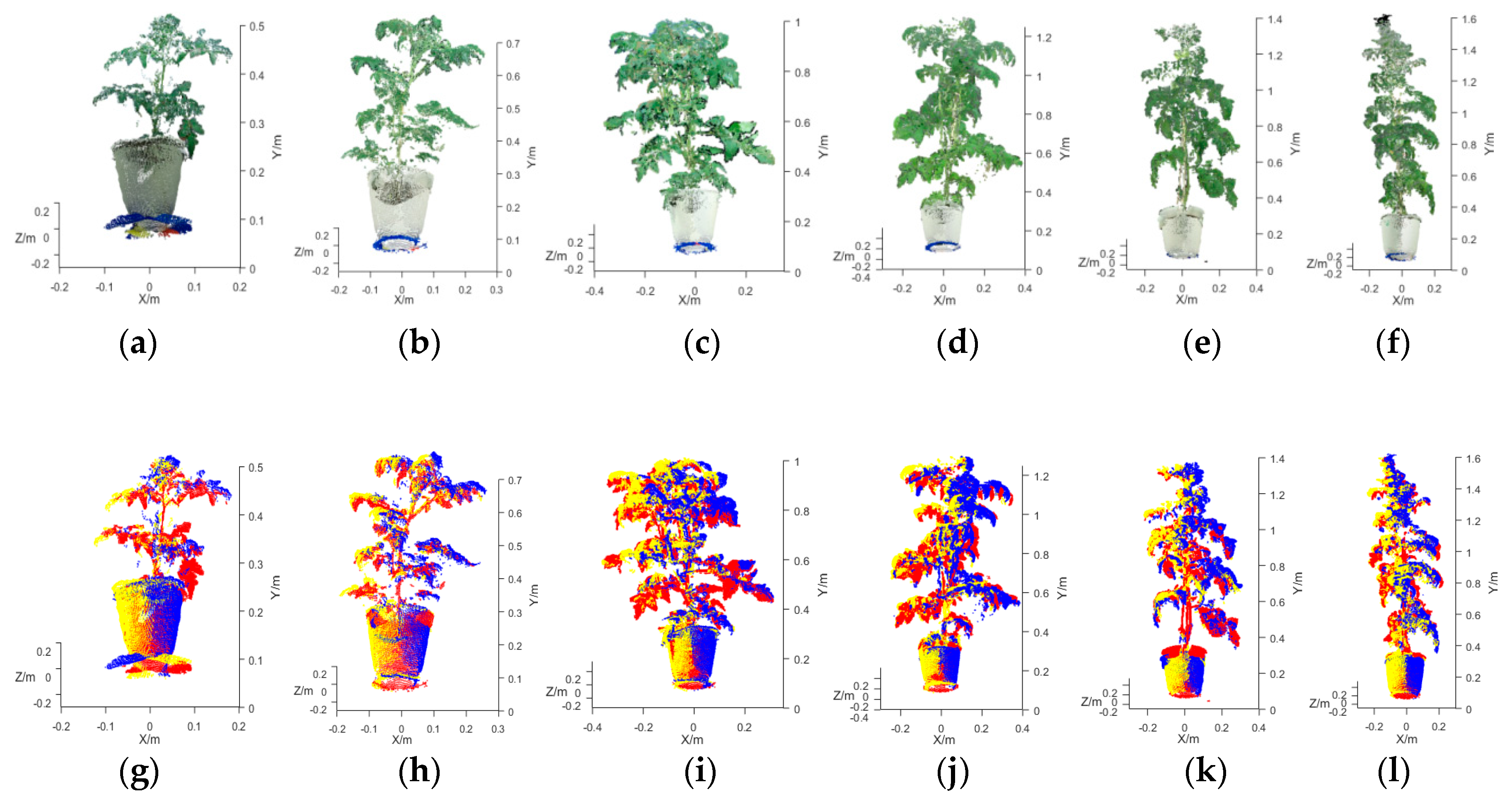
3.1. Reconstruction of GTP 3D Point Clouds
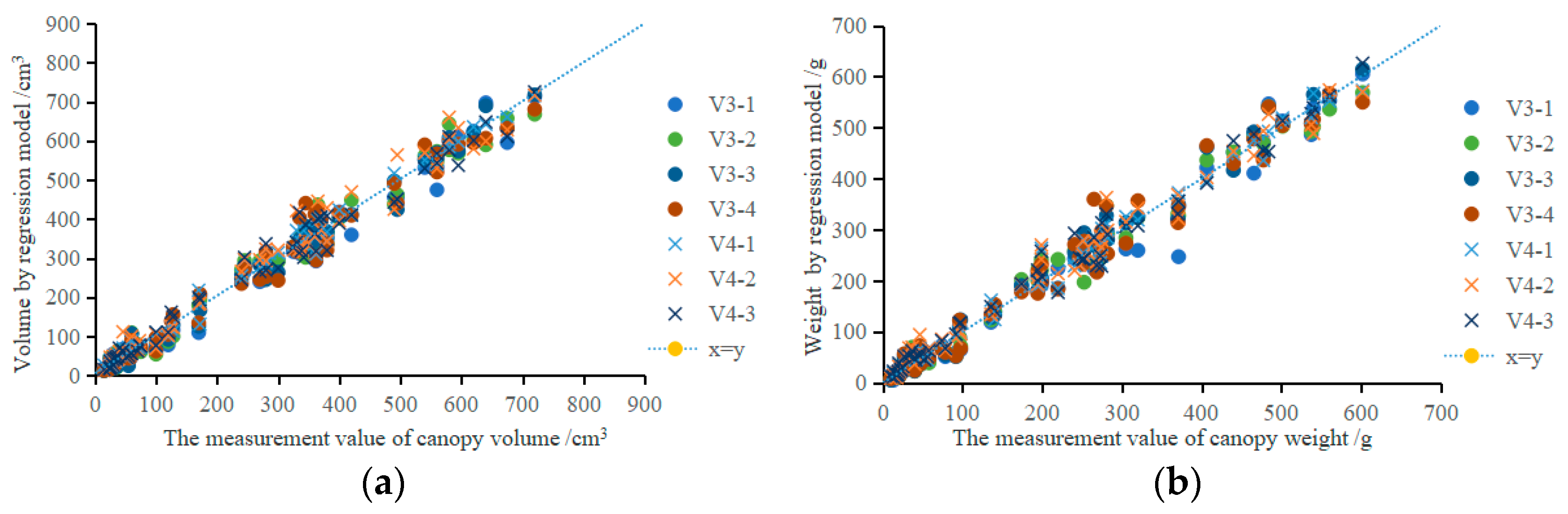
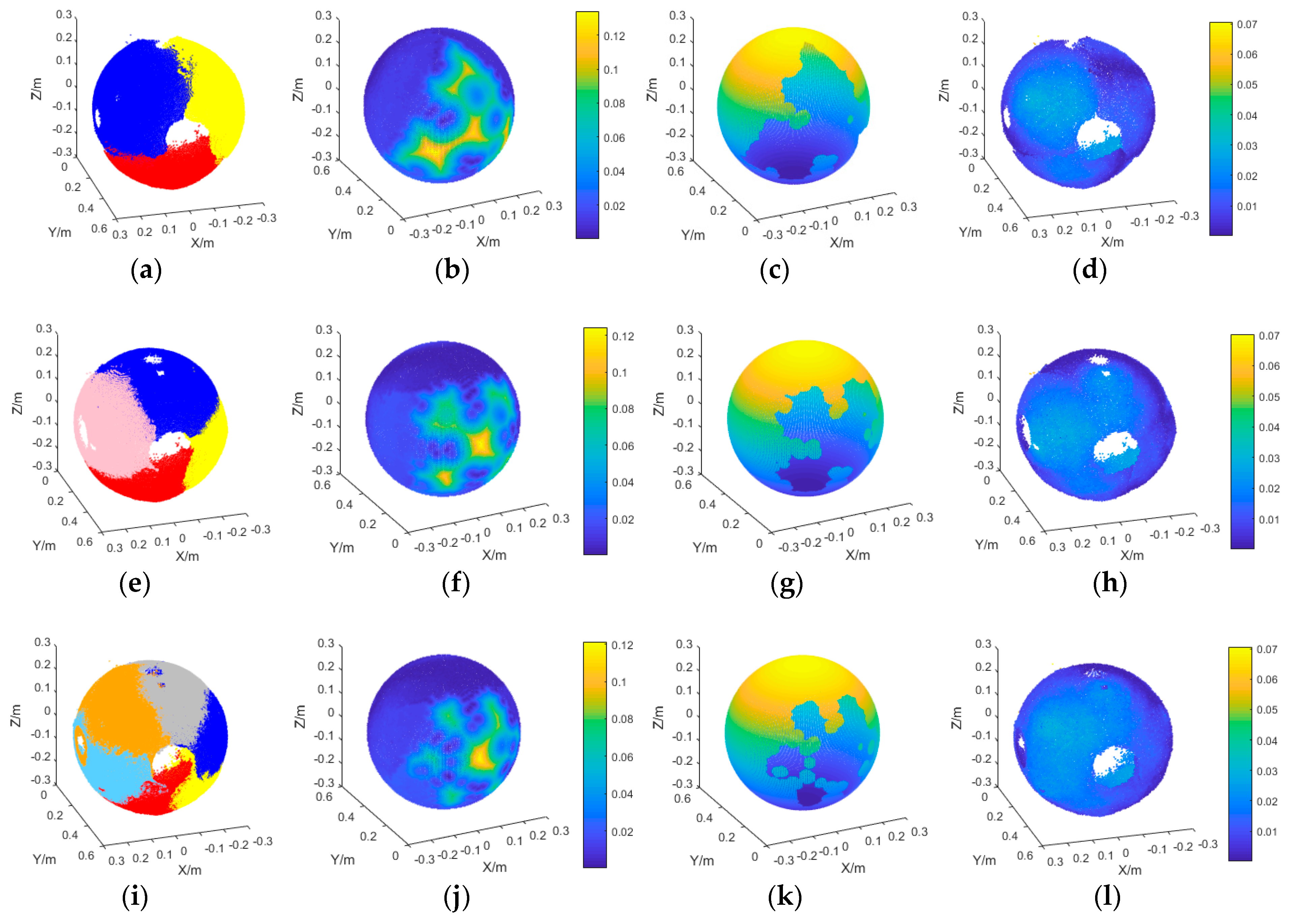
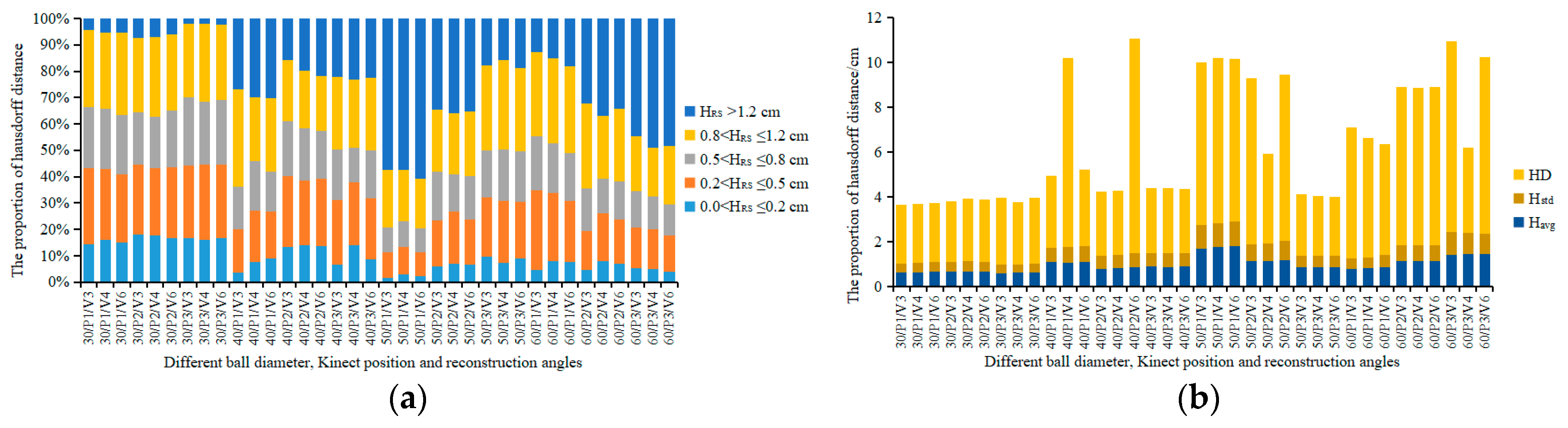
3.2. Accuracy Analysis of Point Cloud Reconstruction of the GTPs
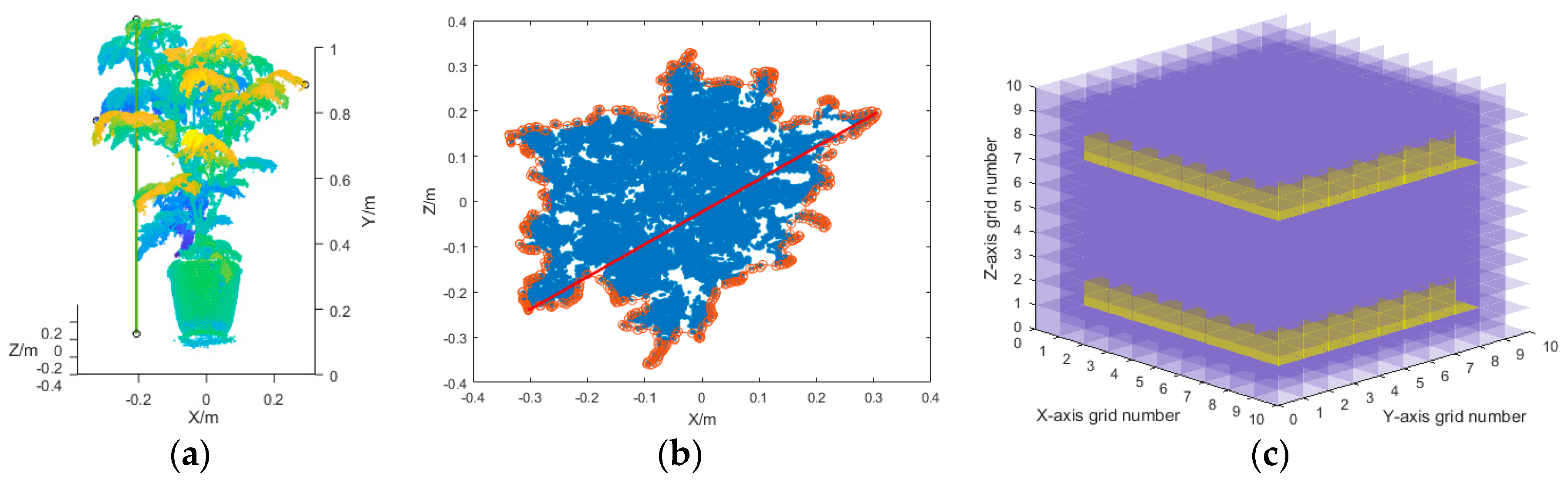
3.3. Calculation Method of 3D Point Cloud Morphological Characteristics
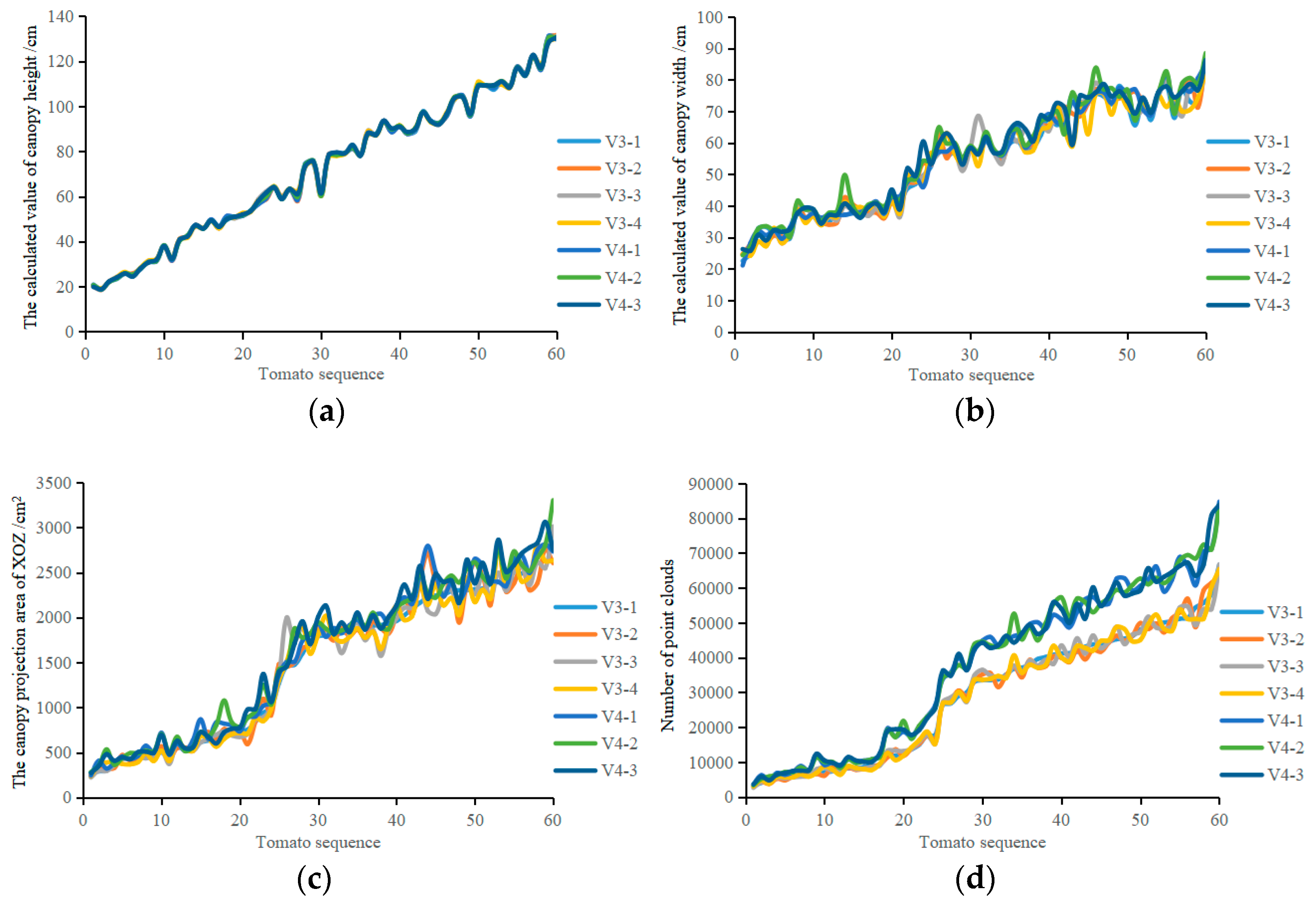
3.4. Error Analysis of the Calculation Method of the 3D Point Cloud Morphological Features
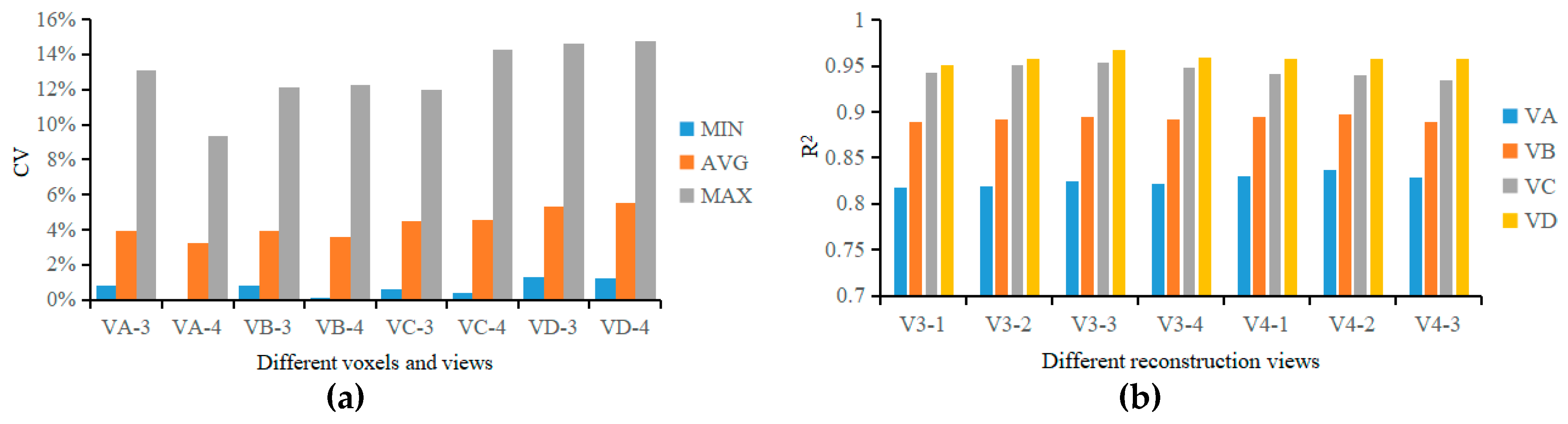
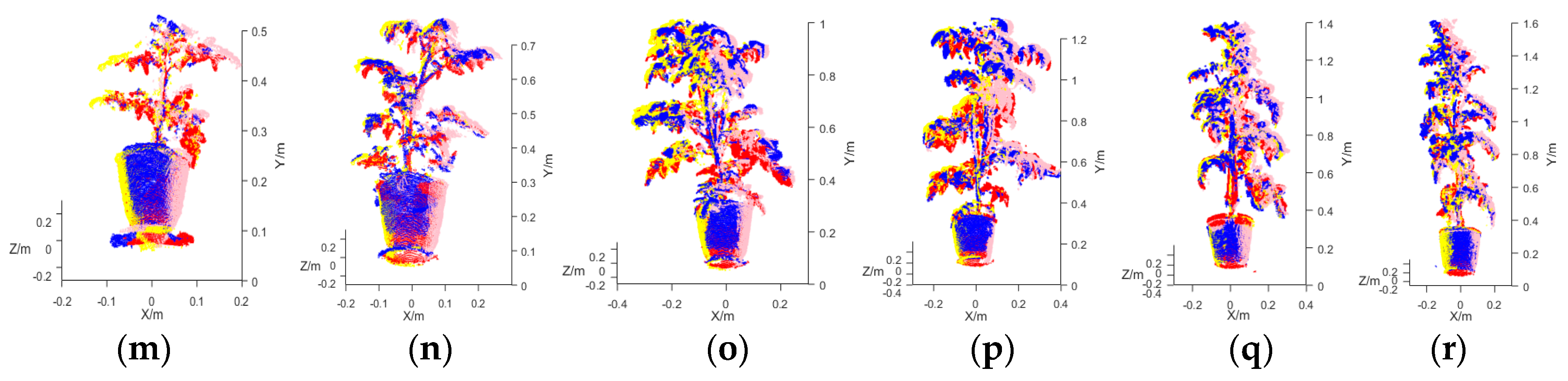
3.5. Applicability Analysis of Geometrical Calculation Methods for Greenhouse Tomato Plants
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | two-dimensional |
| 2.5D | two-and-a-half-dimensional |
| 3D | three-dimensional |
| RGB | red–green–blue |
| RGB-D | red–green–blue–depth |
| CT | computed tomography |
| MRI | magnetic resonance imaging |
| AOV | angle of view |
| AOVs | angles of view |
| TOF | time of flight |
| ICP | iterative closest point |
| SSBs | standard Styrofoam balls |
| GTPs | greenhouse tomato plants |
| LED | light-emitting diode |
| fps | frames per second |
| VN | the number of angles of view for 3D reconstruction of the plant |
| H | height |
| W | maximum width |
| NP | point cloud number |
| SXOZ | area of the canopy projected in the horizontal plane |
| V | canopy volume |
| FW | fresh weight |
| V3 | three angles of view |
| V4 | four angles of view |
| V6 | six angles of view |
| VN | number of angles of view for 3D reconstruction of the plant |
| RAD | relative average deviation |
| CV | coefficient of variation |
| SD | standard deviation |
| AVG | average value |
| MAX | maximum value |
| MIN | minimum value |
| HD | Hausdorff distance |
| Havg | average of the Hausdorff distance set |
| Hstd | standard deviation of the Hausdorff distance set |
| HRS | set of distances between the reconstructed and reference point clouds |
| HSR | set of distances between the points of the reference and reconstructed point clouds |
| R2 | coefficient of determination |
| RMSE | root-mean-square error |
Appendix A




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ball Diameter/cm | DY | DX | Vol | Cr/% | |||
|---|---|---|---|---|---|---|---|
| RAD/% | CV/% | RAD/% | CV/% | RAD/% | CV/% | ||
| 30 | 2.96 | 3.50 | 2.01 | 2.27 | 4.87 | 5.27 | 92.81 |
| 40 | 2.49 | 4.14 | 1.63 | 2.53 | 3.95 | 4.35 | 89.85 |
| 50 | 1.99 | 4.06 | 1.40 | 3.08 | 1.72 | 2.06 | 89.91 |
| 60 | 1.97 | 4.76 | 1.61 | 4.42 | 5.02 | 5.18 | 86.42 |
| Reconstruction Angle | RAD | Cr | Kinect Position | RAD | Cr/% | ||||
|---|---|---|---|---|---|---|---|---|---|
| DY/% | DX/% | Vol/% | DY/% | DX/% | Vol/% | ||||
| V3 | 2.33 | 1.52 | 4.14 | 85.45 | P1 | 1.24 | 1.30 | 3.32 | 87.10 |
| V4 | 2.38 | 1.42 | 4.00 | 90.17 | P2 | 2.70 | 1.31 | 4.16 | 87.60 |
| V6 | 2.34 | 2.05 | 3.52 | 93.62 | P3 | 3.12 | 2.37 | 4.19 | 94.54 |
References
- Pan, Y. Analysis of concepts and categories of plant phenome and phenomics. Acta Agron. Sin. 2015, 41, 175–186. [Google Scholar] [CrossRef]
- Furbank, R.T.; Tester, M. Phenomics—Technologies to relieve the phenotyping bottleneck. Trends Plant Sci. 2011, 16, 635–644. [Google Scholar] [CrossRef]
- Dhondt, S.; Wuyts, N.; Inzé, D. Cell to whole-plant phenotyping: The best is yet to come. Trends Plant Sci. 2013, 18, 428–439. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Tardieu, F.; Pridmore, T.; Doonan, J.; Reynolds, D.; Hall, N.; Griffiths, S.; Chen, T.; Zhu, Y.; Wang, X.; et al. Plant phenomics: History, present status and challenges. J. Nanjing Agric. Univ. 2018, 41, 580–588. [Google Scholar] [CrossRef]
- Rahaman, M.M.; Chen, D.; Gillani, Z.; Klukas, C.; Chen, M. Advanced phenotyping and phenotype data analysis for the study of plant growth and development. Front. Plant Sci. 2015, 6, 619. [Google Scholar] [CrossRef] [Green Version]
- Perez-Sanz, F.; Navarro, P.J.; Egea-Cortines, M. Plant phenomics: An overview of image acquisition technologies and image data analysis algorithms. Gigascience 2017, 6, 1–18. [Google Scholar] [CrossRef] [PubMed]
- An, N.; Palmer, C.M.; Baker, R.L.; Markelz, R.J.C.; Ta, J.; Covington, M.F.; Maloof, J.N.; Welch, S.M.; Weinig, C. Plant high-throughput phenotyping using photogrammetry and imaging techniques to measure leaf length and rosette area. Comput. Electron. Agric. 2016, 127, 376–394. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.; Li, Y.; Zhang, Y.; Wang, X.; Chen, M.; Li, X.; Yan, T. Nondestructive measurement method for greenhouse cucumber parameters based on machine vision. Eng. Agric. Environ. Food 2016, 9, 70–78. [Google Scholar] [CrossRef]
- Kutulakos, K.N.; Seitz, S.M. A theory of shape by space carving. Int. J. Comput. Vis. 2000, 38, 199–218. [Google Scholar] [CrossRef]
- Zheng, E.; Wu, C. Structure from motion using structure-less resection. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 2075–2083. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Ribeiro, Á.; Peteinatos, G.G.; Pérez-Ruiz, M.; Gerhards, R.; Bengochea-Guevara, J.M.; Machleb, J.; Andújar, D. Low-Cost Three-Dimensional Modeling of Crop Plants. Sensors 2019, 19, 2883. [Google Scholar] [CrossRef]
- Andujar, D.; Calle, M.; Fernandez-Quintanilla, C.; Ribeiro, A.; Dorado, J. Three-dimensional modeling of weed plants using low-cost photogrammetry. Sensors 2018, 18, 1077. [Google Scholar] [CrossRef] [PubMed]
- Rose, J.C.; Paulus, S.; Kuhlmann, H. Accuracy analysis of a multi-view stereo approach for phenotyping of tomato plants at the organ level. Sensors 2015, 15, 9651–9665. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Teng, P.; Shimizu, Y.; Hosoi, F.; Omasa, K. Estimating 3D leaf and stem shape of nursery paprika plants by a novel multi-camera photography system. Sensors 2016, 16, 874. [Google Scholar] [CrossRef] [PubMed]
- Paulus, S.; Schumann, H.; Kuhlmann, H.; Léon, J. High-precision laser scanning system for capturing 3D plant architecture and analysing growth of cereal plants. Biosyst. Eng. 2014, 121, 1–11. [Google Scholar] [CrossRef]
- Yan, T.; Zhu, H.; Sun, L.; Wang, X.; Ling, P. Detection of 3-D objects with a 2-D laser scanning sensor for greenhouse spray applications. Comput. Electron. Agric. 2018, 152, 363–374. [Google Scholar] [CrossRef]
- Reiser, D.; Vázquez-Arellano, M.; Paraforos, D.S.; Garrido-Izard, M.; Griepentrog, H.W. Iterative individual plant clustering in maize with assembled 2D LiDAR data. Comput. Ind. 2018, 99, 42–52. [Google Scholar] [CrossRef]
- Van, V.A.; Tourell, M.C.; Koebernick, N.; Pileio, G.; Roose, T. Correlative visualization of root mucilage degradation using X-ray CT and NMRI. Front. Environ. Sci. 2018, 6, 32. [Google Scholar] [CrossRef]
- Xiang, R.; Jiang, H.; Ying, Y. Recognition of clustered tomatoes based on binocular stereo vision. Comput. Electron. Agric. 2014, 106, 75–90. [Google Scholar] [CrossRef]
- Xiong, X.; Yu, L.; Yang, W.; Liu, M.; Jiang, N.; Wu, D.; Chen, G.; Xiong, L.; Liu, K.; Liu, Q. A high-throughput stereo-imaging system for quantifying rape leaf traits during the seedling stage. Plant Methods 2017, 13, 7. [Google Scholar] [CrossRef]
- Andújar, D.; Ribeiro, A.; Fernández-Quintanilla, C.; Dorado, J. Using depth cameras to extract structural parameters to assess the growth state and yield of cauliflower crops. Comput. Electron. Agric. 2016, 122, 67–73. [Google Scholar] [CrossRef]
- Li, J.; Tang, L. Developing a low-cost 3D plant morphological traits characterization system. Comput. Electron. Agric. 2017, 143, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Su, Q.; Kondo, N.; Li, M.; Sun, H.; Riza, D.F.A.; Habaragamuwa, H. Potato quality grading based on machine vision and 3D shape analysis. Comput. Electron. Agric. 2018, 152, 261–268. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, L.; Xiang, L.; Wu, Q.; Jiang, H. Automatic non-destructive growth measurement of leafy vegetables based on kinect. Sensors 2018, 18, 806. [Google Scholar] [CrossRef]
- Vázquez-Arellano, M.; Reiser, D.; Paraforos, D.S.; Garrido-Izard, M.; Burce, M.E.C.; Griepentrog, H.W. 3-D reconstruction of maize plants using a time-of-flight camera. Comput. Electron. Agric. 2018, 145, 235–247. [Google Scholar] [CrossRef]
- Lin, Y. LiDAR: An important tool for next-generation phenotyping technology of high potential for plant phenomics? Comput. Electron. Agric. 2015, 119, 61–73. [Google Scholar] [CrossRef]
- Thapa, S.; Zhu, F.; Walia, H.; Yu, H.; Ge, Y. A novel LiDAR-based instrument for high-throughput, 3D measurement of morphological traits Maize and Sorghum. Sensors 2018, 18, 1187. [Google Scholar] [CrossRef] [PubMed]
- Hosoi, F.; Nakabayashi, K.; Omasa, K. 3-D modeling of tomato canopies using a high-resolution portable scanning lidar for extracting structural information. Sensors 2011, 11, 2166–2174. [Google Scholar] [CrossRef] [PubMed]
- George, A.; Michael, L.; Radu, B. Rapid characterization of vegetation structure with a microsoft kinect sensor. Sensors 2013, 13, 2384–2398. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, J.; Sun, G.; Zheng, B. Extraction and Research of Crop Feature Points Based on Computer Vision. Sensors 2019, 19, 2553. [Google Scholar] [CrossRef]
- Vit, A.; Shani, G. Comparing RGB-D Sensors for Close Range Outdoor Agricultural Phenotyping. Sensors 2018, 18, 4413. [Google Scholar] [CrossRef]
- Dionisio, A.; César, F.; José, D. Matching the best viewing angle in depth cameras for biomass estimation based on poplar seedling geometry. Sensors 2015, 15, 12999–13011. [Google Scholar] [CrossRef]
- Pezzuolo, A.; Guarino, M.; Sartori, L.; Marinello, F. A Feasibility Study on the Use of a Structured Light Depth-Camera for Three-Dimensional Body Measurements of Dairy Cows in Free-Stall Barns. Sensors 2018, 18, 673. [Google Scholar] [CrossRef] [PubMed]
- Sun, G.; Wang, X.; Sun, Y.; Ding, Y.; Lu, W. Measurement Method Based on Multispectral Three-Dimensional Imaging for the Chlorophyll Contents of Greenhouse Tomato Plants. Sensors 2019, 19, 3345. [Google Scholar] [CrossRef] [PubMed]
- Hu, P.; Guo, Y.; Li, B.; Zhu, J.; Ma, Y. Three-dimensional reconstruction and its precision evaluation of plant architecture based on multiple view stereo method. Trans. Chin. Soc. Agric. Eng. 2015, 31, 209–214. [Google Scholar] [CrossRef]
- Fang, W.; Feng, H.; Yang, W.; Duan, L.; Chen, G.; Xiong, L.; Liu, Q. High-throughput volumetric reconstruction for 3D wheat plant architecture studies. J. Innov. Opt. Health Sci. 2016, 9, 1650037. [Google Scholar] [CrossRef]
- Brichet, N.; Fournier, C.; Turc, O.; Strauss, O.; Artzet, S.; Pradal, C.; Welcker, C.; Tardieu, F.; Cabrera-Bosquet, L. A robot-assisted imaging pipeline for tracking the growths of maize ear and silks in a high-throughput phenotyping platform. Plant Methods 2017, 13, 96. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, J.Q.; Harrison, R.J.; Li, B. A novel 3D imaging system for strawberry phenotyping. Plant Methods 2017, 13, 93. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Acosta-Gamboa, L.M.; Huang, X.; Lorence, A. Novel low cost 3D surface model reconstruction system for plant phenotyping. J. Imaging 2017, 3, 39. [Google Scholar] [CrossRef]
- Paul, B.J.; Neil, M.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Graham, R.L. An efficient algorith for determining the convex hull of a finite planar set. Inf. Process. Lett. 1972, 1, 132–133. [Google Scholar] [CrossRef]
- Grau, E.; Durrieu, S.; Fournier, R.; Gastellu-Etchegorry, J.P.; Yin, T. Estimation of 3D vegetation density with Terrestrial Laser Scanning data using voxels. A sensitivity analysis of influencing parameters. Remote Sens. Environ. 2017, 191, 373–388. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.; Gupta, K.; Zhou, J.; Najjaran, H. SliceNet: A proficient model for real-time 3D shape-based recognition. Neurocomputing 2018, 316, 144–155. [Google Scholar] [CrossRef]
















| VN | Abbreviation | AOV 1 | AOV 2 | AOV 3 | AOV 4 |
|---|---|---|---|---|---|
| V3 | V3-1 | 0° | 120° | 240° | |
| V3-2 | 30° | 150° | 270° | ||
| V3-3 | 60° | 180° | 300° | ||
| V3-4 | 90° | 210° | 330° | ||
| V4 | V4-1 | 0° | 90° | 180° | 270° |
| V4-2 | 30° | 120° | 210° | 300° | |
| V4-3 | 60° | 150° | 240° | 330° |
| VN | Measured Value | Calculated Value | SD | CV | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Max | Min | Avg | Max | Min | Avg | Max | Min | Avg | ||
| V3 | H/cm | 131.13 | 18.73 | 72.22 | 1.49 | 0.04 | 0.37 | 2.49% | 0.03% | 0.62% |
| W/cm | 85.71 | 24.12 | 54.78 | 6.73 | 0.24 | 1.76 | 10.22% | 0.52% | 3.25% | |
| SXOZ/cm2 | 2771.60 | 246.79 | 1488.58 | 252.41 | 7.82 | 71.24 | 14.21% | 1.18% | 5.30% | |
| NP | 65,448.00 | 2882.25 | 29,075.39 | 2924.91 | 81.94 | 947.44 | 13.88% | 0.57% | 3.83% | |
| V4 | H/cm | 130.35 | 18.74 | 72.25 | 1.18 | 0.02 | 0.30 | 2.00% | 0.04% | 0.50% |
| W/cm | 86.56 | 23.92 | 56.18 | 7.23 | 0.06 | 1.57 | 12.50% | 0.17% | 2.93% | |
| SXOZ/cm2 | 2926.02 | 264.69 | 1591.00 | 265.27 | 6.40 | 64.30 | 20.19% | 0.60% | 4.54% | |
| NP | 84,132.00 | 3489.67 | 37,532.43 | 4546.59 | 30.27 | 1042.10 | 9.60% | 0.40% | 3.06% | |
| Calculation Method for Canopy Volume | Reconstruction Method | Voxel Precision | Calculation Method for Canopy Volume | Reconstruction Method | Voxel Precision | ||
|---|---|---|---|---|---|---|---|
| VA | VA-3 | V3 | 2 mm | VC | VC-3 | V3 | 5 mm |
| VA-4 | V4 | 2 mm | VC-4 | V4 | 5 mm | ||
| VB | VB-3 | V3 | 3.3 mm | VD | VD-3 | V3 | 8 mm |
| VB-4 | V4 | 3.3 mm | VD-4 | V4 | 8 mm | ||
| Measurement Method | Measurement Value | R2 | RMSE | RAD | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MIN | MAX | AVG | MIN | MAX | AVG | MIN | MAX | AVG | ||
| V3 | H/cm | 0.9883 | 0.9897 | 0.9890 | 0.30 | 10.88 | 3.15 | 0.41% | 18.05% | 5.53% |
| W/cm | 0.9519 | 0.9658 | 0.9587 | 0.31 | 7.76 | 3.30 | 0.49% | 18.07% | 5.60% | |
| V/cm3 | 0.9190 | 0.9491 | 0.9297 | 3.81 | 59.53 | 23.95 | 1.41% | 26.95% | 9.77% | |
| FW/g | 0.8906 | 0.9195 | 0.9056 | 2.09 | 67.97 | 20.24 | 1.10% | 29.40% | 10.62% | |
| V4 | H/cm | 0.9880 | 0.9894 | 0.9887 | 0.37 | 10.75 | 3.20 | 0.37% | 18.47% | 5.59% |
| W/cm | 0.9516 | 0.9752 | 0.9597 | 0.43 | 8.84 | 3.49 | 0.59% | 20.44% | 6.47% | |
| V/cm3 | 0.9018 | 0.9341 | 0.9205 | 2.55 | 57.79 | 23.46 | 0.60% | 24.75% | 9.27% | |
| FW/g | 0.9000 | 0.9225 | 0.9108 | 0.74 | 58.46 | 15.99 | 1.35% | 23.09% | 8.52% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, G.; Wang, X. Three-Dimensional Point Cloud Reconstruction and Morphology Measurement Method for Greenhouse Plants Based on the Kinect Sensor Self-Calibration. Agronomy 2019, 9, 596. https://doi.org/10.3390/agronomy9100596
Sun G, Wang X. Three-Dimensional Point Cloud Reconstruction and Morphology Measurement Method for Greenhouse Plants Based on the Kinect Sensor Self-Calibration. Agronomy. 2019; 9(10):596. https://doi.org/10.3390/agronomy9100596
Chicago/Turabian StyleSun, Guoxiang, and Xiaochan Wang. 2019. "Three-Dimensional Point Cloud Reconstruction and Morphology Measurement Method for Greenhouse Plants Based on the Kinect Sensor Self-Calibration" Agronomy 9, no. 10: 596. https://doi.org/10.3390/agronomy9100596
APA StyleSun, G., & Wang, X. (2019). Three-Dimensional Point Cloud Reconstruction and Morphology Measurement Method for Greenhouse Plants Based on the Kinect Sensor Self-Calibration. Agronomy, 9(10), 596. https://doi.org/10.3390/agronomy9100596