A Novel Approach for Cloud Detection in Scenes with Snow/Ice Using High Resolution Sentinel-2 Images

Abstract
:1. Introduction
2. Materials and Methods
2.1. Proposed Method Framework
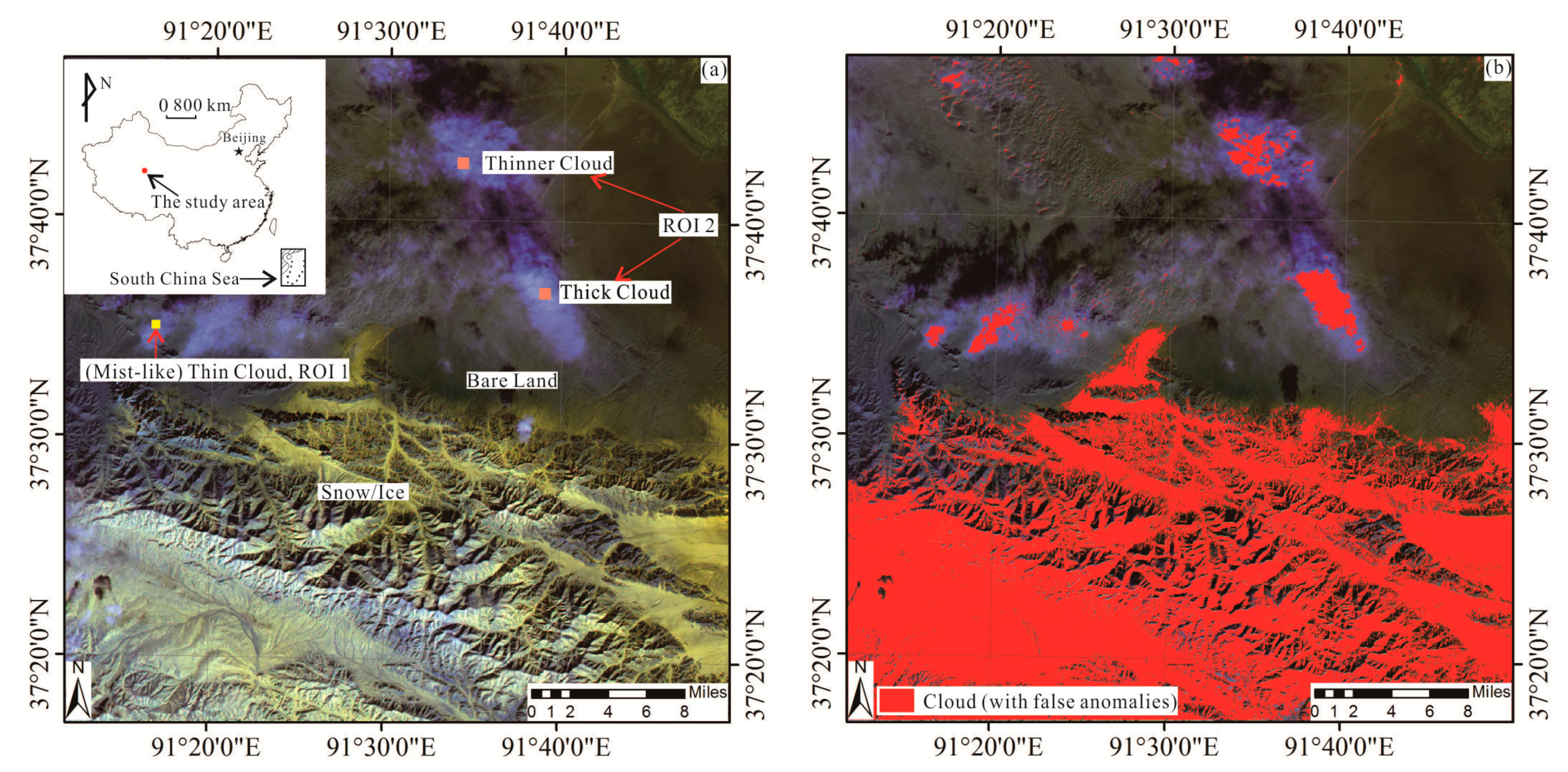
2.2. Study Area and Data Source
2.3. Methods
2.3.1. Matched Filtering (MF)
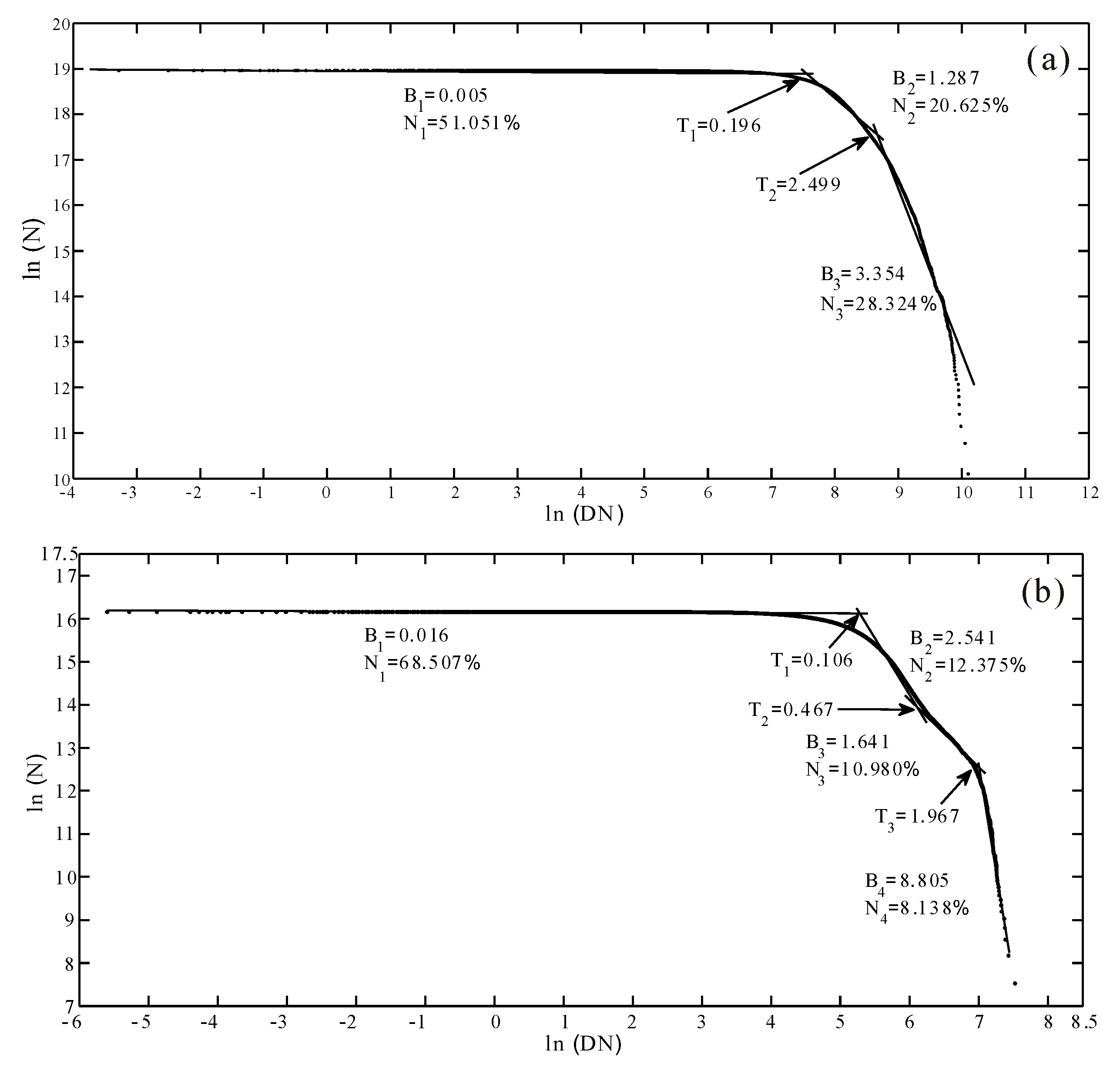
2.3.2. Digital Number-Frequency (DN-N) fractal
2.3.3. Spatial Analysis of Anomaly Patterns
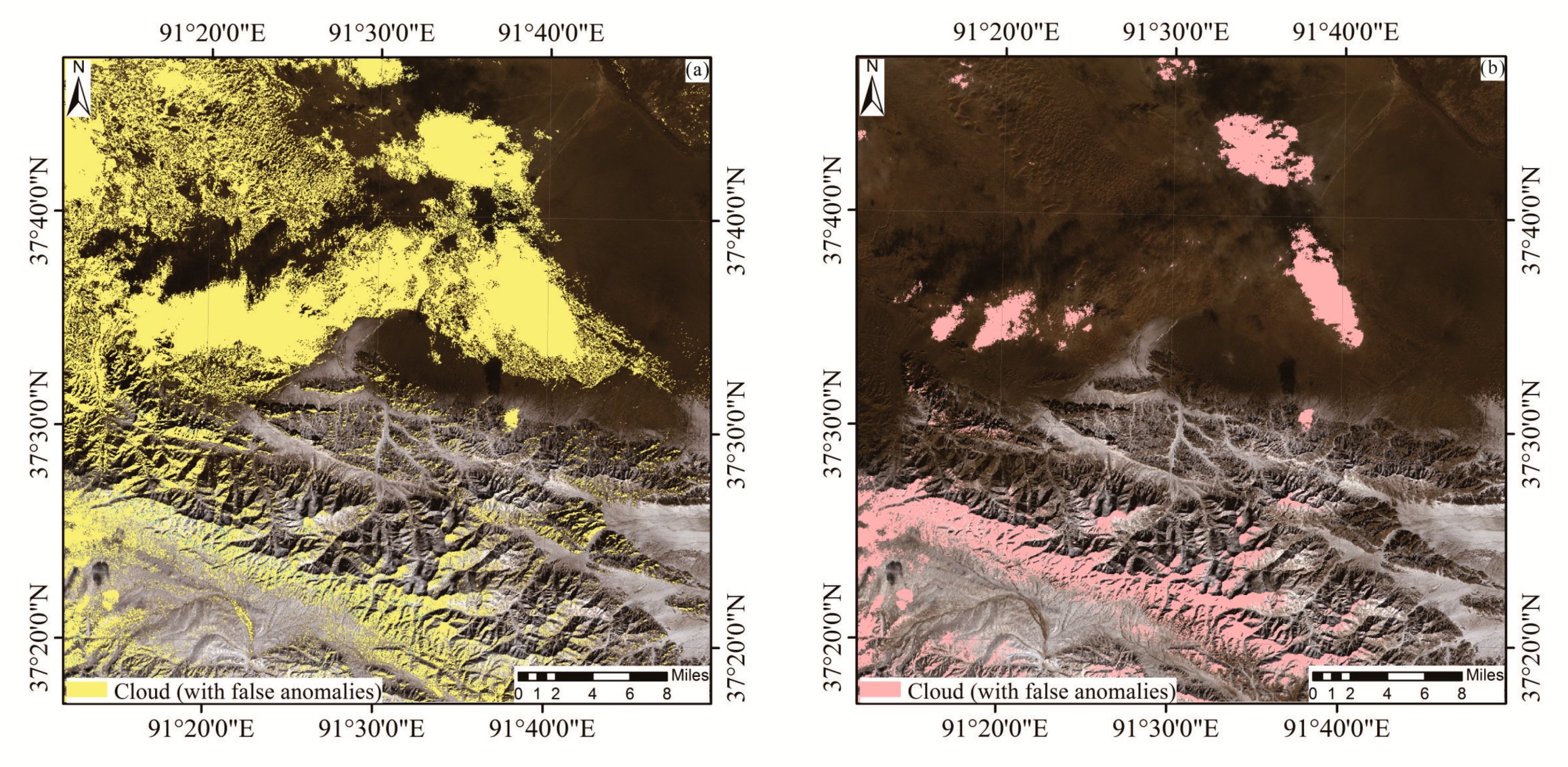
3. Results and Discussion
4. Conclusion
Author Contributions
Funding
Conflicts of Interest
References
- Bunting, J.T.; d’Entremont, R.P. Improved cloud Detection Utilizing Defense Meteorological Satellite Program Near Infrared Measurements; Air Force Geophysics Lab Hanscom Afb Ma: Bedford, MA, USA, 1982. [Google Scholar]
- Dozier, J. Spectral signature of alpine snow cover from the landsat thematic mapper. Remote Sens. Environ. 1989, 28, 9–22. [Google Scholar] [CrossRef]
- Salomonson, V.V.; Appel, I. Estimating fractional snow cover from MODIS using the normalized difference snow index. Remote Sens. Environ. 2004, 89, 351–360. [Google Scholar] [CrossRef]
- Homan, J.W.; Luce, C.H.; McNamara, J.P.; Glenn, N.F. Improvement of distributed snowmelt energy balance modeling with MODIS-based NDSI-derived fractional snow-covered area data. Hydrol. Process. 2011, 25, 650–660. [Google Scholar] [CrossRef]
- Bertrand, C.; Gonzalez, L.; Ipe, A.; Clerbaux, N.; Dewitte, S. Improvement in the GERB short wave flux estimations over snow covered surfaces. Adv. Space Res. 2008, 41, 1894–1905. [Google Scholar] [CrossRef]
- Burtonjohnson, A.; Black, M.; Fretwell, P.T.; Kaluzagilbert, J. An automated methodology for differentiating rock from snow, clouds and sea in Antarctica from Landsat 8 imagery: A new rock outcrop map and area estimation for the entire Antarctic continent. Cryosphere 2016, 10, 1665–1677. [Google Scholar] [CrossRef]
- Beaudoin, L.; Nicolas, J.M.; Tupin, F.; Hueckel, M. Introducing Spatial Information in k-Means Algorithm for Cloud Detection in Optical Satellite Images. In Proceedings of the Europto Remote Sensing, Barcelona, Spain, 31 January 2001. [Google Scholar]
- Wang, W.; Song, W.G.; Liu, S.X.; Zhang, Y.; Zheng, H.Y. A Cloud Detection Algorithm for MODIS Images Combining Kmeans Clustering and Multi-Spectral Threshold Method. Spectrosc. Spectr. Anal. 2011, 31, 1061–1064. [Google Scholar]
- Le Hégarat-Mascle, S.; André, C. Use of Markov random fields for automatic cloud/shadow detection on high resolution optical images. ISPRS J. Photogramm. Remote Sens. 2009, 64, 351–366. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Candra, D.; Phinn, S.; Scarth, P. Cloud and cloud shadow masking using multi-temporal cloud masking algorithm in tropical environmental. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41. [Google Scholar] [CrossRef]
- Smith, A.; Wooster, M.; Powell, A.; Usher, D. Texture based feature extraction: Application to burn scar detection in Earth observation satellite sensor imagery. Int. J. Remote Sens. 2002, 23, 1733–1739. [Google Scholar] [CrossRef]
- Yu, W.; Cao, X.; Xu, L.; Mohamed, B. Automatic cloud detection for remote sensing image. Chin. J. Sci. Instrum. 2006, 27, 2184–2186. [Google Scholar] [CrossRef]
- Li, P.; Dong, L.; Xiao, H.; Xu, M. A cloud image detection method based on SVM vector machine. Neurocomputing 2015, 169, 34–42. [Google Scholar] [CrossRef]
- Vasquez, R.E.; Manian, V.B. Texture-based cloud detection in MODIS images. In Proceedings of the Remote Sensing of Clouds and the Atmosphere VII, Crete, Greece, 18 April 2003; pp. 259–268. [Google Scholar] [CrossRef]
- Zhu, L.; Xiao, P.; Feng, X.; Zhang, X.; Wang, Z.; Jiang, L. Support vector machine-based decision tree for snow cover extraction in mountain areas using high spatial resolution remote sensing image. J. Appl. Remote Sens. 2014, 8, 084698. [Google Scholar] [CrossRef]
- Racoviteanu, A.; Williams, M.W. Decision tree and texture analysis for mapping debris-covered glaciers in the Kangchenjunga area, Eastern Himalaya. Remote Sens. 2012, 4, 3078–3109. [Google Scholar] [CrossRef]
- Hughes, G. On the mean accuracy of statistical pattern recognizers. IEEE Trans. Inf. Theory 1968, 14, 55–63. [Google Scholar] [CrossRef]
- Bian, J.; Li, A.; Liu, Q.; Huang, C. Cloud and snow discrimination for CCD images of HJ-1A/B constellation based on spectral signature and spatio-temporal context. Remote Sens. 2016, 8, 31. [Google Scholar] [CrossRef]
- Müller-Wilm, U.; Devignot, O.; Pessiot, L. Sen2Cor Configuration and User Manual; ESA: Paris, France, 2016. [Google Scholar]
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. In Proceedings of the Image and Signal Processing for Remote Sensing XXIII, Warsaw, Poland, 11–14 September 2017. [Google Scholar] [CrossRef]
- Kukawska, E.; Lewinski, S.; Krupinski, M.; Malinowski, R.; Nowakowski, A.; Rybicki, M.; Kotarba, A. Multitemporal Sentinel-2 data–remarks and observations. In Proceedings of the 2017 9th International Workshop on the Analysis of Multitemporal Remote Sensing Images (Multi-Temp), Brugge, Belgium, 27–29 June 2017. [Google Scholar] [CrossRef]
- Coluzzi, R.; Imbrenda, V.; Lanfredi, M.; Simoniello, T. A first assessment of the Sentinel-2 Level 1-C cloud mask product to support informed surface analyses. Remote Sens. Environ. 2018, 217, 426–443. [Google Scholar] [CrossRef]
- Van der Valk, D. Remote Sensing of Japanese WWII Airstrips in the Papua Province Republic of Indonesia; Delft University of Technology: Delft, The Netherlands, 2017. [Google Scholar]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L. Best practices for the reprojection and resampling of Sentinel-2 Multi Spectral Instrument Level 1C data. Remote Sens. Lett. 2016, 7, 1023–1032. [Google Scholar] [CrossRef] [Green Version]
- ESA (European Space Agency). Sentinel-2 User Handbook, Issue 1, Rev 2, Revision 2; ESA Standard Document; ESA: Paris, France, 24 July 2015. [Google Scholar]
- Crane, R.G.; Anderson, M.R. Satellite discrimination of snow/cloud surfaces. Int. J. Remote Sens. 1984, 5, 213–223. [Google Scholar] [CrossRef]
- Yokoya, N.; Chan, J.C.-W.; Segl, K. Potential of resolution-enhanced hyperspectral data for mineral mapping using simulated EnMAP and Sentinel-2 images. Remote Sens. 2016, 8, 172. [Google Scholar] [CrossRef]
- Strahler, A.H. The use of prior probabilities in maximum likelihood classification of remotely sensed data. Remote Sens. Environ. 1980, 10, 135–163. [Google Scholar] [CrossRef]
- Hogland, J.; Billor, N.; Anderson, N. Comparison of standard maximum likelihood classification and polytomous logistic regression used in remote sensing. Eur. J. Remote Sens. 2013, 46, 623–640. [Google Scholar] [CrossRef]
- Hutchison, K.D.; Cracknell, A.P. Visible Infrared Imager Radiometer Suite: A New Operational Cloud Imager; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Molan, Y.E.; Refahi, D.; Tarashti, A.H. Mineral mapping in the Maherabad area, eastern Iran, using the HyMap remote sensing data. Int. J. Appl. Earth Obs. Geoinf. 2014, 27, 117–127. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Lim, J.S. The importance of phase in signals. Proc. IEEE 1981, 69, 529–541. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.-s.; Defrise, M.; Deconinck, F. Symmetric phase-only matched filtering of Fourier-Mellin transforms for image registration and recognition. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 1156–1168. [Google Scholar] [CrossRef]
- Harsanyi, J.C.; Chang, C.-I. Hyperspectral image classification and dimensionality reduction: An orthogonal subspace projection approach. IEEE Trans. Geosci. Remote Sens. 1994, 32, 779–785. [Google Scholar] [CrossRef]
- Ferrier, G. Application of imaging spectrometer data in identifying environmental pollution caused by mining at Rodaquilar, Spain. Remote Sens. Environ. 1999, 68, 125–137. [Google Scholar] [CrossRef]
- Boardman, J.W.; Kruse, F.A. Analysis of imaging spectrometer data using N-dimensional geometry and a mixture-tuned matched filtering approach. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4138–4152. [Google Scholar] [CrossRef]
- Gan, F.P.; Wang, R.S.; Ai nai, M.A.; University, P. Beijing, Alteration Extracting Based on Spectral Match Filter(SMF). J. Image Gr. 2003. [Google Scholar] [CrossRef]
- Liu, Y.H.; Liu, S.F.; Zhang, C.; Pei, X.Y. The Weight Information Extraction of Clay Minerals Based on Hyperion Data: A Case Study of Ganzhou Area, Jiangxi Province. Remote Sens. Land Resour. 2010, 25, 26–30. [Google Scholar] [CrossRef]
- Williams, A.P.; Hunt, E.R., Jr. Estimation of leafy spurge cover from hyperspectral imagery using mixture tuned matched filtering. Remote Sens. Environ. 2002, 82, 446–456. [Google Scholar] [CrossRef]
- Han, L.; Zhao, B.; Wu, J.-J.; Wu, T.-T.; Feng, M. A new method for extraction of alteration information using the Landsat 8 imagery in a heavily vegetated and sediments-covered region: A case study from Zhejiang Province, E. China. Geol. J. 2018, 53, 33–43. [Google Scholar] [CrossRef]
- Cheng, Q.; Li, Q. A fractal concentration–area method for assigning a color palette for image representation. Comput. Geosci. 2002, 28, 567–575. [Google Scholar] [CrossRef]
- Shahriari, H.; Ranjbar, H. Image Segmentation for Hydrothermal Alteration Mapping Using PCA and Concentration–Area Fractal Model. Nat. Resour. Res. 2013, 22, 191–206. [Google Scholar] [CrossRef]
- Han, L.; Zhao, B.; Wu, J.J.; Zhang, S.Y.; Pilz, J.; Yang, F. An integrated approach for extraction of lithology information using the SPOT 6 imagery in a heavily Quaternary-covered region—North Baoji District of China. Geol. J. 2017. [Google Scholar] [CrossRef]
- Zhao, B.; Lei, Y.; Qiu, J.; Shi, C.; Zhang, D. Internal structural analysis of geochemical anomaly based on the content arrangement method: A case study of copper stream sediment survey in northwestern Zhejiang province. Geophys. Geochem. Explor. 2015, 39, 297–305. [Google Scholar]
- Liu, L.; Zhou, J.; Han, L.; Xu, X. Mineral mapping and ore prospecting using Landsat TM and Hyperion data, Wushitala, Xinjiang, northwestern China. Ore Geol. Rev. 2017, 81, 280–295. [Google Scholar] [CrossRef]
- Mitchel, A. The ESRI Guide to GIS analysis, Volume 2: Spartial measurements and statistics; ESRI Press: Redlands, CA, USA, 2005. [Google Scholar]
- Yunus, A.P.; Dou, J.; Sravanthi, N. Remote sensing of chlorophyll-a as a measure of red tide in Tokyo Bay using hotspot analysis. Remote Sens. Appl. Soc. Environ. 2015, 2, 11–25. [Google Scholar] [CrossRef]
- Arora, P.; Varshney, S. Analysis of k-means and k-medoids algorithm for big data. Procedia Comput. Sci. 2016, 78, 507–512. [Google Scholar] [CrossRef]
- Bruzzone, L.; Prieto, D.F. A technique for the selection of kernel-function parameters in RBF neural networks for classification of remote-sensing images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1179–1184. [Google Scholar] [CrossRef] [Green Version]
- Schowengerdt, R.A. Techniques for Image Processing and Classifications in Remote Sensing; Academic Press: Cambridge, MA, USA, 2012. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Producer’s Accuracy | User’s Accuracy | Overall Accuracy | |
|---|---|---|---|---|
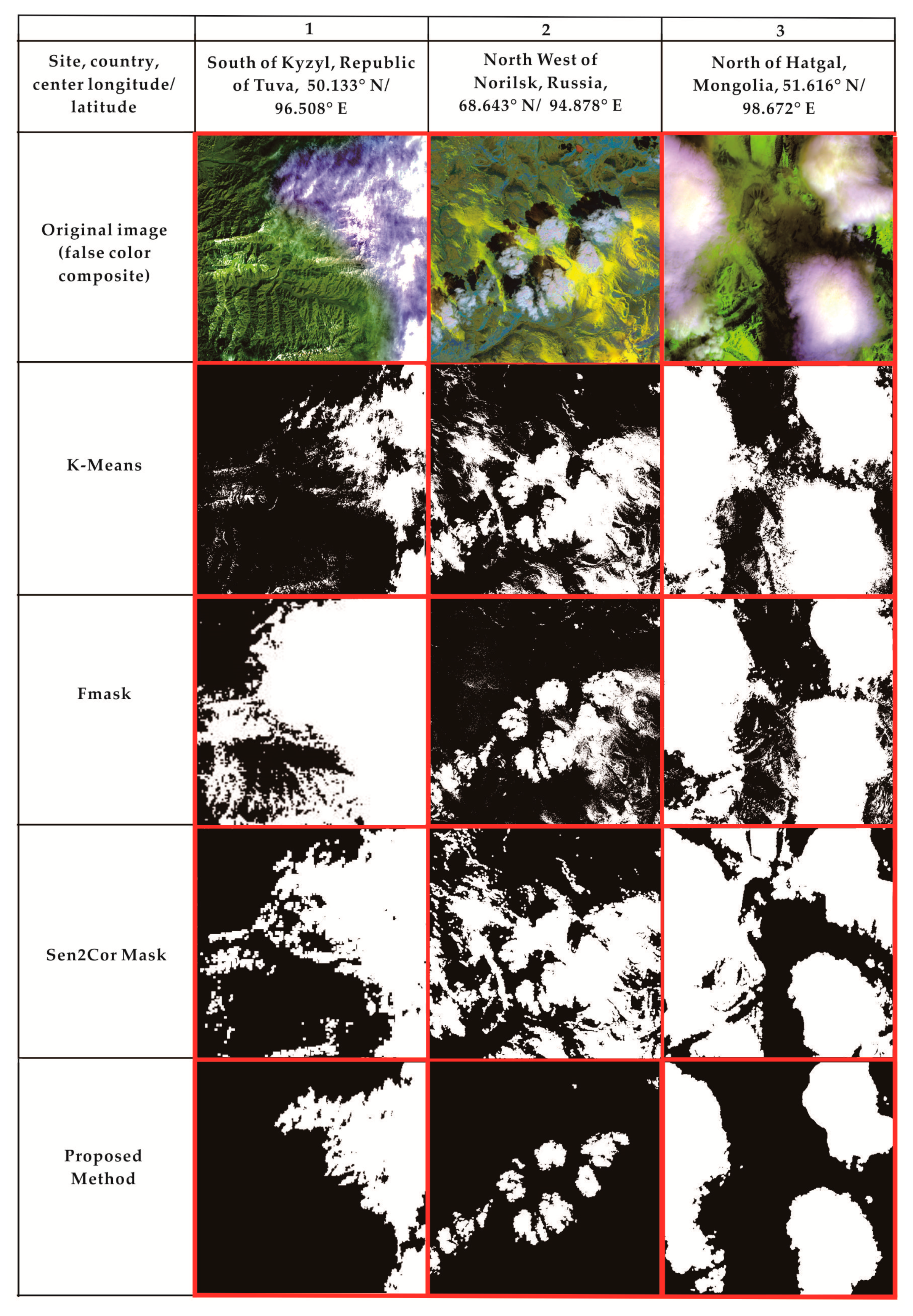
| 1 | K-Means | 53.33% | 80.00% | 80.85% |
| FMask | 97.33% | 64.60% | 82.12% | |
| Sen2Cor | 94.67% | 78.02% | 89.79% | |
| Proposed | 96.00% | 96.06% | 97.45% | |
| 2 | K-Means | 92.01% | 47.92% | 77.02% |
| FMask | 90.06% | 75.37% | 91.49% | |
| Sen2Cor | 98.28% | 44.95% | 74.04% | |
| Proposed | 96.10% | 90.57% | 97.02% | |
| 3 | K-Means | 90.06% | 81.82% | 87.23% |
| FMask | 93.21% | 81.58% | 88.09% | |
| Sen2Cor | 95.46% | 73.08% | 82.98% | |
| Proposed | 93.06% | 96.90% | 95.48% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Wu, T.; Liu, Q.; Liu, Z. A Novel Approach for Cloud Detection in Scenes with Snow/Ice Using High Resolution Sentinel-2 Images. Atmosphere 2019, 10, 44. https://doi.org/10.3390/atmos10020044
Han L, Wu T, Liu Q, Liu Z. A Novel Approach for Cloud Detection in Scenes with Snow/Ice Using High Resolution Sentinel-2 Images. Atmosphere. 2019; 10(2):44. https://doi.org/10.3390/atmos10020044
Chicago/Turabian StyleHan, Ling, Tingting Wu, Qing Liu, and Zhiheng Liu. 2019. "A Novel Approach for Cloud Detection in Scenes with Snow/Ice Using High Resolution Sentinel-2 Images" Atmosphere 10, no. 2: 44. https://doi.org/10.3390/atmos10020044
APA StyleHan, L., Wu, T., Liu, Q., & Liu, Z. (2019). A Novel Approach for Cloud Detection in Scenes with Snow/Ice Using High Resolution Sentinel-2 Images. Atmosphere, 10(2), 44. https://doi.org/10.3390/atmos10020044