Calibration Procedure and Accuracy of Wind and Turbulence Measurements with Five-Hole Probes on Fixed-Wing Unmanned Aircraft in the Atmospheric Boundary Layer and Wind Turbine Wakes


Abstract
:1. Introduction
2. Materials and Methods
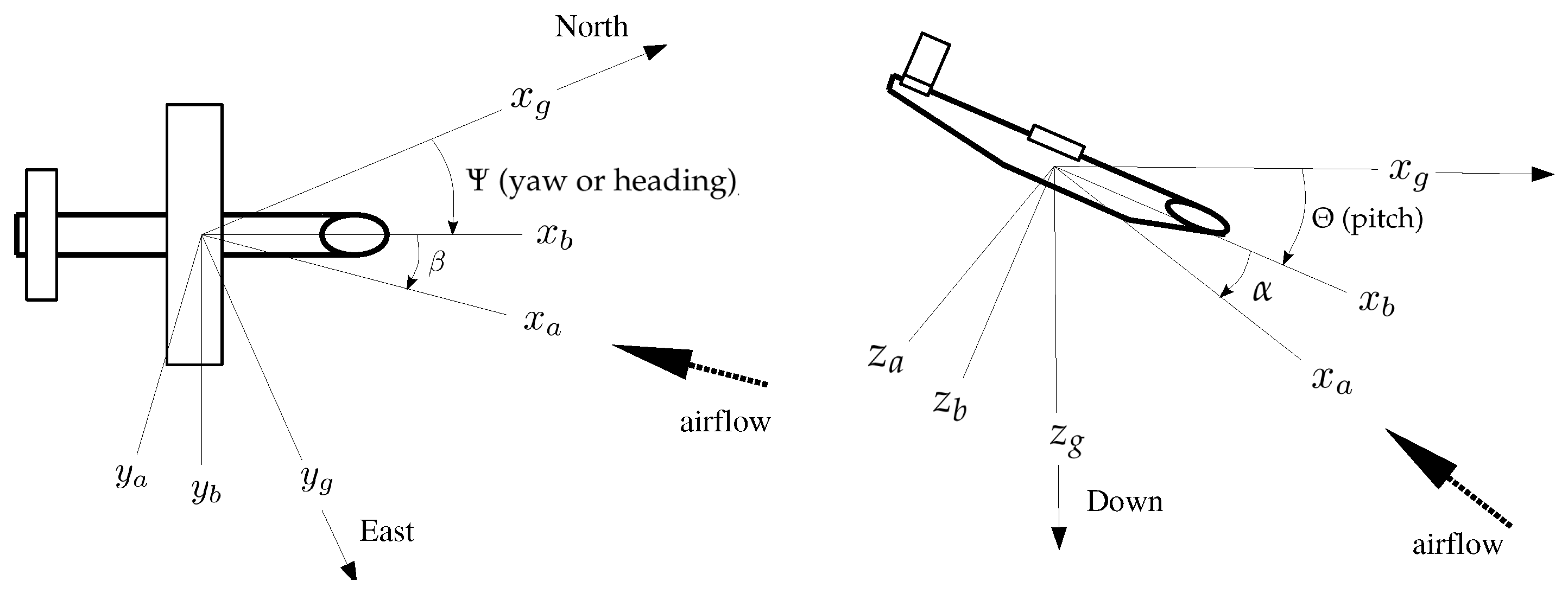
2.1. Wind Vector Measurement with Multi-hole Probes
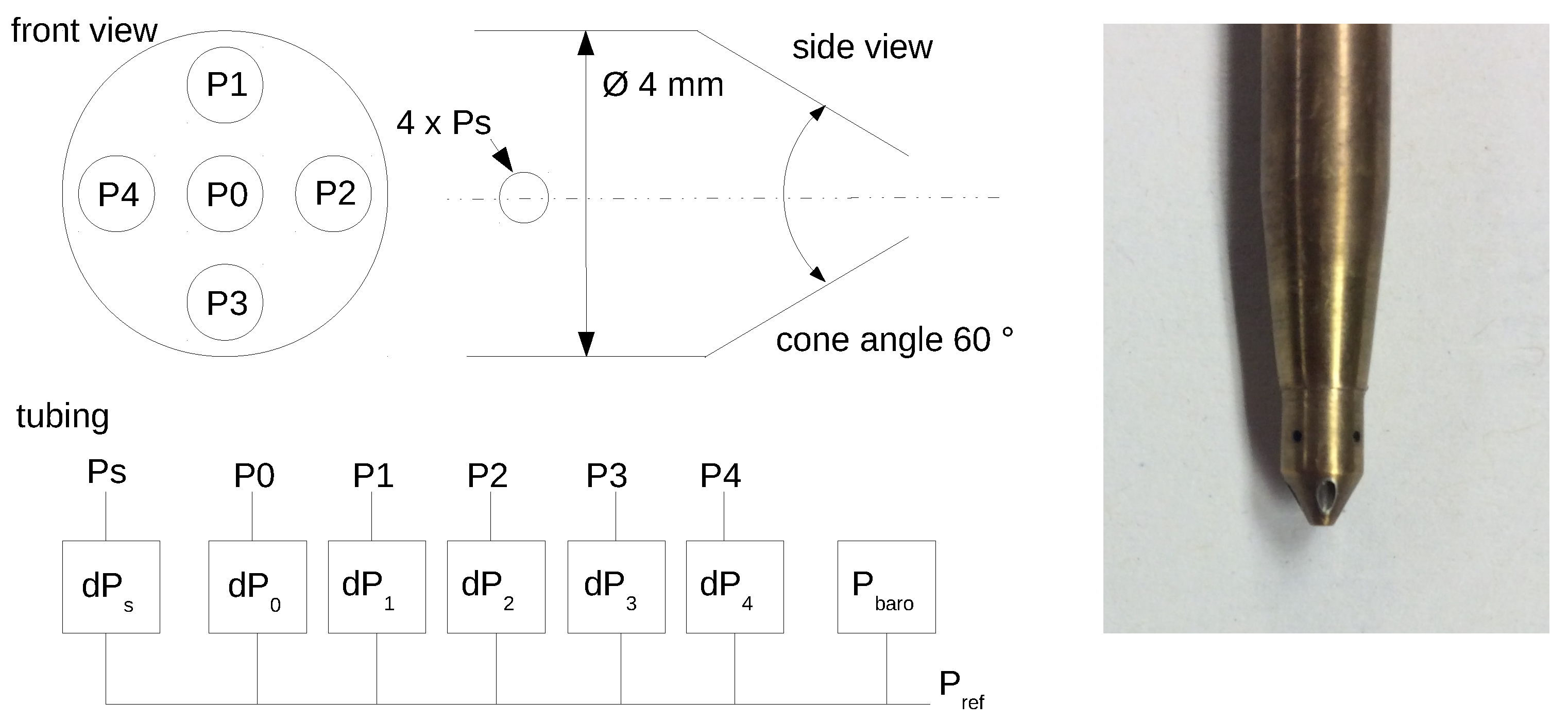
2.2. Five-Hole Probe “Pressures-to-Airflow-Vector”
2.3. Wind-Tunnel Measurements
2.4. MASC and the Methods for Deriving Mean Values and Turbulence Statistics
3. Results and Discussion
3.1. Polynomials at Different Reynolds Numbers
- The dynamic pressure coefficients for and are close together, but for lies below and has a larger offset.
- A characteristic local minimum persists around for and for all three curves of . This feature varies for the individual parameters.
- It is concluded that the polynomials of and for is the most robust for tilted flow, since the curves for and have a stronger gradient between and .
3.2. In-Flight Calibration of the Wind Measurement
3.3. Flight Experiments: Influence of Different Calibration Speeds on Mean Values, Turbulence Statistics and Single Flow Features
3.3.1. Low Turbulence in Stably Stratified Nocturnal Polar Boundary Layer (ISOBAR)
3.3.2. High Turbulence in Complex Terrain (COMPLEX)
3.3.3. Transect of the Wake of a Wind Turbine (WAKE)
3.4. Interpolation of Polynomials and Independent True Airspeed Measurement for Improved Accuracy
4. Outlook and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wolfe, G.M.; Kawa, S.R.; Hanisco, T.F.; Hannun, R.A.; Newman, P.A.; Swanson, A.; Bailey, S.; Barrick, J.; Thornhill, K.L.; Diskin, G.; et al. The NASA Carbon Airborne Flux Experiment (CARAFE): Instrumentation and methodology. Atmos. Meas. Tech. 2018, 11, 1757–1776. [Google Scholar] [CrossRef]
- Bange, J.; Esposito, M.; Lenschow, D.H.; Brown, P.R.; Dreiling, V.; Giez, A.; Mahrt, L.; Malinowski, S.P.; Rodi, A.R.; Shaw, R.A.; et al. Measurement of aircraft state and thermodynamic and dynamic variables. In Airborne Measurements for Environmental Research: Methods and Instruments; Wiley-VCH Verlag GmbH & Co., KGaA: Weinheim, Germany, 2013; pp. 7–75. [Google Scholar] [CrossRef]
- Lenschow, D.H. Aircraft Measurements in the Boundary Layer. In Probing the Atmospheric Boundary Layer; Lenschow, D.H., Ed.; American Meteorological Society: Boston, MA, USA, 1986; pp. 39–53. [Google Scholar]
- Rautenberg, A.; Graf, M.; Wildmann, N.; Platis, A.; Bange, J. Reviewing Wind Measurement Approaches for Fixed-Wing Unmanned Aircraft. Atmosphere 2018, 9, 422. [Google Scholar] [CrossRef]
- Witte, B.M.; Singler, R.F.; Bailey, S.C. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef]
- Wildmann, N.; Hofsäß, M.; Weimer, F.; Joos, A.; Bange, J. MASC—A small Remotely Piloted Aircraft (RPA) for wind energy research. Adv. Sci. Res. 2014, 11, 55–61. [Google Scholar] [CrossRef]
- Van den Kroonenberg, A.; Martin, T.; Buschmann, M.; Bange, J.; Vörsmann, P. Measuring the wind vector using the autonomous mini aerial vehicle M2AV. J. Atmos. Ocean. Technol. 2008, 25, 1969–1982. [Google Scholar] [CrossRef]
- Bärfuss, K.; Pätzold, F.; Altstädter, B.; Kathe, E.; Nowak, S.; Bretschneider, L.; Bestmann, U.; Lampert, A. New Setup of the UAS ALADINA for Measuring Boundary Layer Properties, Atmospheric Particles and Solar Radiation. Atmosphere 2018, 9, 28. [Google Scholar] [CrossRef]
- Schuyler, T.J.; Guzman, M.I. Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere 2017, 8, 206. [Google Scholar] [CrossRef]
- Hartmann, J.; Gehrmann, M.; Kohnert, K.; Metzger, S.; Sachs, T. New calibration procedures for airborne turbulence measurements and accuracy of the methane fluxes during the AirMeth campaigns. Atmos. Meas. Tech. 2018, 11, 4567–4581. [Google Scholar] [CrossRef]
- Metzger, S.; Junkermann, W.; Butterbach-Bahl, K.; Schmid, H.; Foken, T. Corrigendum to “Measuring the 3-D wind vector with a weight-shift microlight aircraft” published in Atmos. Meas. Tech., 4, 1421–1444, 2011. Atmos. Meas. Tech. 2011, 4, 1515–1539. [Google Scholar] [CrossRef]
- Corsmeier, U.; Hankers, R.; Wieser, A. Airborne Turbulence Measurements in the Lower Troposphere Onboard the Research Aircraft Dornier 128-6, D-IBUF. Meteorol. Z. 2001, 4, 315–329. [Google Scholar] [CrossRef]
- Williams, A.; Marcotte, D. Wind measurements on a maneuvering twin-engine turboprop aircraft accounting for flow distortion. J. Atmos. Ocean. Technol. 2000, 17, 795–810. [Google Scholar] [CrossRef]
- Khelif, D.; Burns, S.; Friehe, C. Improved wind measurements on research aircraft. J. Atmos. Ocean. Technol. 1999, 16, 860–875. [Google Scholar] [CrossRef]
- Brown, E.N.; Friehe, C.A.; Lenschow, D.H. The Use of Pressure Fluctuations on the Nose of an Aircraft for Measuring Air Motion. J. Clim. Appl. Meteorol. 1983, 22, 171–180. [Google Scholar] [CrossRef] [Green Version]
- Lenschow, D.H. Probing the Atmospheric Boundary Layer; American Meteorological Society: Boston, MA, USA, 1986; Volume 270. [Google Scholar]
- Drüe, C.; Heinemann, G. A review and practical guide to in-flight calibration for aircraft turbulence sensors. J. Atmos. Ocean. Technol. 2013, 30, 2820–2837. [Google Scholar] [CrossRef]
- Mallaun, C.; Giez, A.; Baumann, R. Calibration of 3-D wind measurements on a single-engine research aircraft. Atmos. Meas. Tech. 2015, 8, 3177–3196. [Google Scholar] [CrossRef] [Green Version]
- Vellinga, O.S.; Dobosy, R.J.; Dumas, E.J.; Gioli, B.; Elbers, J.A.; Hutjes, R.W. Calibration and quality assurance of flux observations from a small research aircraft. J. Atmos. Ocean. Technol. 2013, 30, 161–181. [Google Scholar] [CrossRef]
- Leise, J.; Masters, J.M. Wind Measurement From Aircraft; U.S. Department of Commerce, National Oceanic and Atmospheric Administration, Aircraft Operation Center: Charleston, SC, USA, 1993.
- Bögel, W.; Baumann, R. Test and calibration of the DLR Falcon wind measuring system by maneuvers. J. Atmos. Ocean. Technol. 1991, 8, 5–18. [Google Scholar] [CrossRef]
- Dominy, R.; Hodson, H. An investigation of factors influencing the calibration of five-hole probes for three-dimensional flow measurements. J. Turbomach. 1993, 115, 513–519. [Google Scholar] [CrossRef]
- Lee, S.W.; Jun, S.B. Reynolds number effects on the non-nulling calibration of a cone-type five-hole probe for turbomachinery applications. J. Mech. Sci. Technol. 2005, 19, 1632–1648. [Google Scholar] [CrossRef]
- Wildmann, N.; Bernard, S.; Bange, J. Measuring the local wind field at an escarpment using small remotely-piloted aircraft. Renew. Energy 2017, 103, 613–619. [Google Scholar] [CrossRef]
- Cormier, M.; Caboni, M.; Lutz, T.; Boorsma, K.; Krämer, E. Numerical analysis of unsteady aerodynamics of floating offshore wind turbines. J. Phys. Conf. Ser. 2018, 1037, 072048. [Google Scholar] [CrossRef]
- Sanderse, B.; Van der Pijl, S.; Koren, B. Review of computational fluid dynamics for wind turbine wake aerodynamics. Wind Energy 2011, 14, 799–819. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.T.; Porté-Agel, F. Large-eddy simulation of wind-turbine wakes: Evaluation of turbine parametrisations. Bound.-Layer Meteorol. 2011, 138, 345–366. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- Vermeer, L.; Sørensen, J.N.; Crespo, A. Wind turbine wake aerodynamics. Prog. Aerosp. Sci. 2003, 39, 467–510. [Google Scholar] [CrossRef]
- Rodi, A.R.; Leon, D. Correction of static pressure on a research aircraft in accelerated flight using differential pressure measurements. Atmos. Meas. Tech. 2012, 5, 2569–2579. [Google Scholar] [CrossRef] [Green Version]
- Martin, S.; Bange, J. The Influence of Aircraft Speed Variations on Sensible Heat-Flux Measurements by Different Airborne Systems. Bound.-Layer Meteorol. 2014, 150, 153–166. [Google Scholar] [CrossRef]
- Braam, M.; Beyrich, F.; Bange, J.; Platis, A.; Martin, S.; Maronga, B.; Moene, A.F. On the Discrepancy in Simultaneous Observations of the Structure Parameter of Temperature Using Scintillometers and Unmanned Aircraft. Bound.-Layer Meteorol. 2016, 158, 257–283. [Google Scholar] [CrossRef]
- Kral, S.T.; Reuder, J.; Vihma, T.; Suomi, I.; O’Connor, E.; Kouznetsov, R.; Wrenger, B.; Rautenberg, A.; Urbancic, G.; Jonassen, M.O.; et al. Innovative Strategies for Observations in the Arctic Atmospheric Boundary Layer (ISOBAR)—The Hailuoto 2017 Campaign. Atmosphere 2018, 9, 268. [Google Scholar] [CrossRef]
- Boiffier, J.L. The Dynamics of Flight; Wiley: Chichester, UK, 1998; p. 353. [Google Scholar]
- Bange, J. Airborne Measurement of Turbulent Energy Exchange Between the Earth Surface and the Atmosphere; Sierke Verlag: Göttingen, Germany, 2009; 174p, ISBN 978-3-86844-221-2. [Google Scholar]
- Lenschow, D. Airplane measurements of planetary boundary layer structure. J. Appl. Meteorol. 1970, 9, 874–884. [Google Scholar] [CrossRef]
- Black, P.G.; D’Asaro, E.A.; Drennan, W.M.; French, J.R.; Niiler, P.P.; Sanford, T.B.; Terrill, E.J.; Walsh, E.J.; Zhang, J.A. Air–sea exchange in hurricanes: Synthesis of observations from the coupled boundary layer air–sea transfer experiment. Bull. Am. Meteorol. Soc. 2007, 88, 357–374. [Google Scholar] [CrossRef]
- Hall, B.F.; Povey, T. The Oxford Probe: An open access five-hole probe for aerodynamic measurements. Meas. Sci. Technol. 2017, 28, 035004. [Google Scholar] [CrossRef]
- Wildmann, N.; Ravi, S.; Bange, J. Towards higher accuracy and better frequency response with standard multi-hole probes in turbulence measurement with remotely piloted aircraft (RPA). Atmos. Meas. Tech. 2014, 7, 1027–1041. [Google Scholar] [CrossRef] [Green Version]
- Treaster, A.L.; Yocum, A.M. The Calibration and Application of Five-Hole Probes; Technical Report; Pennsylvania State Univ University Park Applied Research Lab: State College, PA, USA, 1978. [Google Scholar]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Wildmann, N.; Mauz, M.; Bange, J. Two fast temperature sensors for probing of the atmospheric boundary layer using small remotely piloted aircraft (RPA). Atmos. Meas. Tech. 2013, 6, 2101–2113. [Google Scholar] [CrossRef] [Green Version]
- Platis, A.; Altstädter, B.; Wehner, B.; Wildmann, N.; Lampert, A.; Hermann, M.; Birmili, W.; Bange, J. An Observational Case Study on the Influence of Atmospheric Boundary-Layer Dynamics on New Particle Formation. Bound.-Layer Meteorol. 2016, 158, 67–92. [Google Scholar] [CrossRef]
- Van den Kroonenberg, A.; Martin, S.; Beyrich, F.; Bange, J. Spatially-averaged temperature structure parameter over a heterogeneous surface measured by an unmanned aerial vehicle. Bound.-Layer Meteorol. 2012, 142, 55–77. [Google Scholar] [CrossRef]
- Rotta, J. Turbulente Strömungen: Eine Einführung in Die Theorie und ihre Anwendung (Turbulent Flows: An Introduction to the Theory and Its Application); Teubner: Stuttgart, Germany, 1972. [Google Scholar]
- Kaimal, J.C.; Finnigan, J.J. Atmospheric Boundary Layer Flows: Their Structure And Measurement; Oxford University Press: Oxford, UK, 1994. [Google Scholar]
- Lenschow, D.H.; Stankov, B.B. Length Scales in the Convective Boundary Layer. J. Atmos. Sci. 1986, 43, 1198–1209. [Google Scholar] [CrossRef] [Green Version]
- Brown, E.N. Position Error Calibration of a Pressure Survey Aircraft Using a Trailing Cone; Tech. Rep. NCAR/TN-313+STR; National Center for Atmospheric Research: Boulder, CO, USA, 1988. [Google Scholar] [CrossRef]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer Science & Business Media: New York, NY, USA, 2012; Volume 13. [Google Scholar]
- Lenschow, D.H.; Mann, J.; Kristensen, L. How Long Is Long Enough When Measuring Fluxes and Other Turbulence Statistics. J. Atmos. Ocean. Technol. 1994, 11, 661–673. [Google Scholar] [CrossRef]
- Mann, J.; Lenschow, D.H. Errors in airborne flux measurements. J. Geophys. Res. Atmos. 1994, 99, 14519–14526. [Google Scholar] [CrossRef]
- Knaus, H.; Rautenberg, A.; Bange, J. Model comparison of two different non-hydrostatic formulations for the Navier-Stokes equations simulating wind flow in complex terrain. J. Wind Eng. Ind. Aerodyn. 2017, 169, 290–307. [Google Scholar] [CrossRef]
- Schulz, C.; Hofsäß, M.; Anger, J.; Rautenberg, A.; Lutz, T.; Cheng, P.W.; Bange, J. Comparison of Different Measurement Techniques and a CFD Simulation in Complex Terrain. J. Phys. Conf. Ser. 2016, 753, 082017. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, N.N.; Proctor, F. Review of idealized aircraft wake vortex models. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014; p. 0927. [Google Scholar]
- Jeong, J.; Hussain, F. On the identification of a vortex. J. Fluid Mech. 1995, 285, 69–94. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [m s] | ISOBAR | COMPLEX | WAKE | |
|---|---|---|---|---|
| 15 | 2.85 | |||
| 22.5 | 3.00 | (yaw) [] | ||
| 28 | 3.66 | |||
| 15 | 1.88 | |||
| 22.5 | 2.01 | (pitch) [] | ||
| 28 | 1.91 | |||
| 15 | 0.92 | 0.96 | 0.87 | |
| 22.5 | 1.08 | 1.13 | 1.00 | [-] |
| 28 | 1.09 | 1.15 | 1.01 |
| barometric pressure ground | 989 hPa |
| temperature ground | C |
| air density ground | 1.33 kg m |
| windspeed | ≈6–9.5 m s |
| wind direction | ≈325–5 |
| averaged true airspeed of the whole flight | m s |
| highest true airspeed of the whole flight | m s |
| lowest true airspeed of the whole flight | m s |
| leg with highest standard deviation of the true airspeed | m s |
| barometric pressure ground | 938 hPa |
| temperature ground | 8.2 C |
| air density ground | 1.16 kg m |
| windspeed | ≈9 m s |
| wind direction | ≈285–305 |
| averaged true airspeed of the whole flight | m s |
| highest true airspeed of the whole flight | m s |
| lowest true airspeed of the whole flight | m s |
| leg with highest standard deviation of the true airspeed | m s |
| barometric pressure ground | 1014 hPa |
| temperature ground | 27 C |
| air density ground | 1.17 kg m |
| windspeed | ≈9 m s |
| wind direction | ≈25 |
| averaged true airspeed of the flight leg | m s |
| highest true airspeed of the flight leg | m s |
| lowest true airspeed of the flight leg | m s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rautenberg, A.; Allgeier, J.; Jung, S.; Bange, J. Calibration Procedure and Accuracy of Wind and Turbulence Measurements with Five-Hole Probes on Fixed-Wing Unmanned Aircraft in the Atmospheric Boundary Layer and Wind Turbine Wakes. Atmosphere 2019, 10, 124. https://doi.org/10.3390/atmos10030124
Rautenberg A, Allgeier J, Jung S, Bange J. Calibration Procedure and Accuracy of Wind and Turbulence Measurements with Five-Hole Probes on Fixed-Wing Unmanned Aircraft in the Atmospheric Boundary Layer and Wind Turbine Wakes. Atmosphere. 2019; 10(3):124. https://doi.org/10.3390/atmos10030124
Chicago/Turabian StyleRautenberg, Alexander, Jonas Allgeier, Saskia Jung, and Jens Bange. 2019. "Calibration Procedure and Accuracy of Wind and Turbulence Measurements with Five-Hole Probes on Fixed-Wing Unmanned Aircraft in the Atmospheric Boundary Layer and Wind Turbine Wakes" Atmosphere 10, no. 3: 124. https://doi.org/10.3390/atmos10030124
APA StyleRautenberg, A., Allgeier, J., Jung, S., & Bange, J. (2019). Calibration Procedure and Accuracy of Wind and Turbulence Measurements with Five-Hole Probes on Fixed-Wing Unmanned Aircraft in the Atmospheric Boundary Layer and Wind Turbine Wakes. Atmosphere, 10(3), 124. https://doi.org/10.3390/atmos10030124