
Prediction of Solar Irradiance and Photovoltaic Solar Energy Product Based on Cloud Coverage Estimation Using Machine Learning Methods

 , , ,
, , ,
Abstract
:1. Introduction
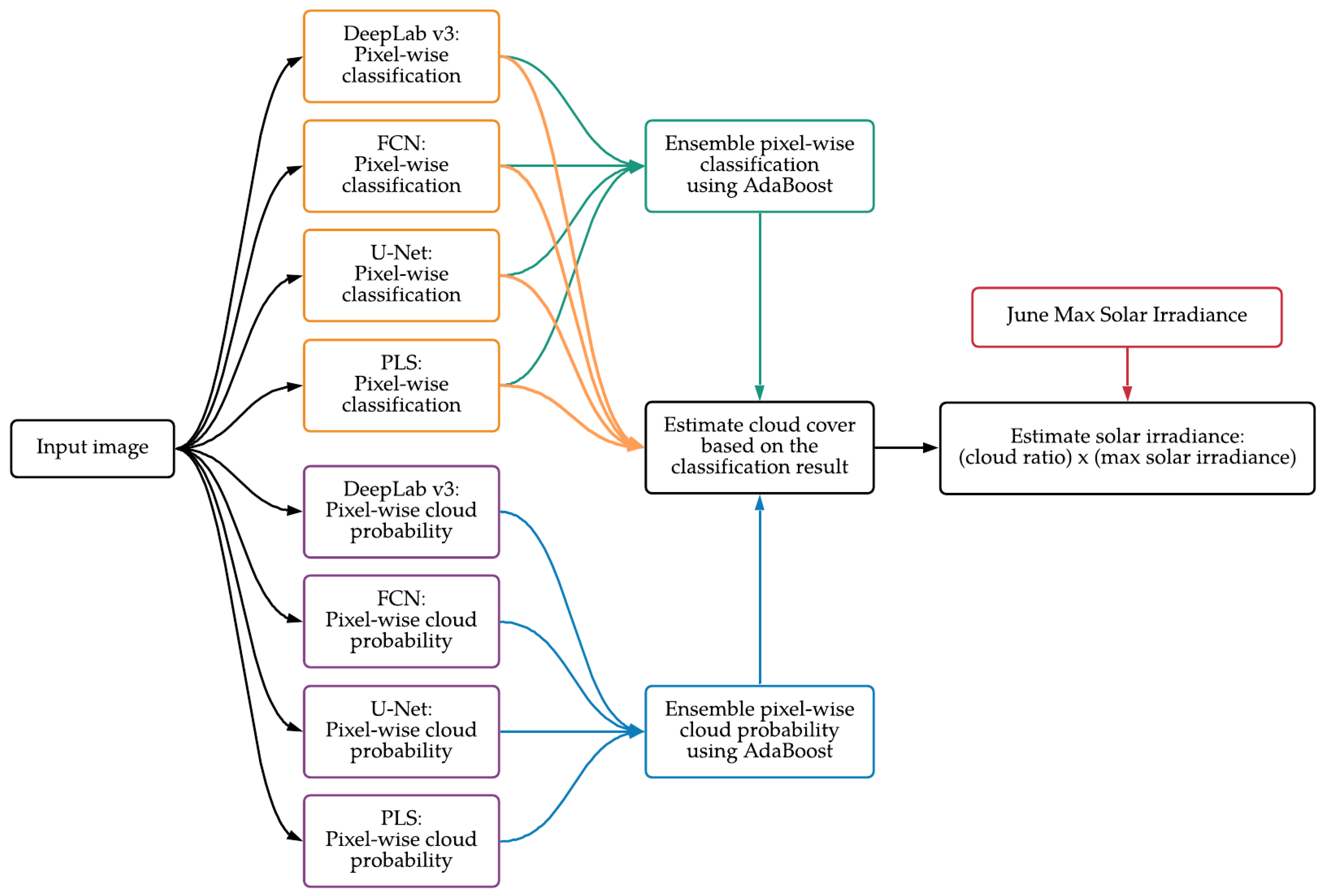
2. Methodology
2.1. Color-Based Segmentation
2.2. Semantic Segmentation Neural Networks
2.2.1. Fully Convolutional Network
2.2.2. U-Net
2.2.3. DeepLab
2.3. Ensemble Method
3. Datasets
3.1. Singapore Whole Sky Imaging Segmentation Database
3.2. Hybrid Thresholding Algorithm Database
3.3. Waggle Cloud Dataset
3.4. Solar Irradiance and Solar Power Product Measure
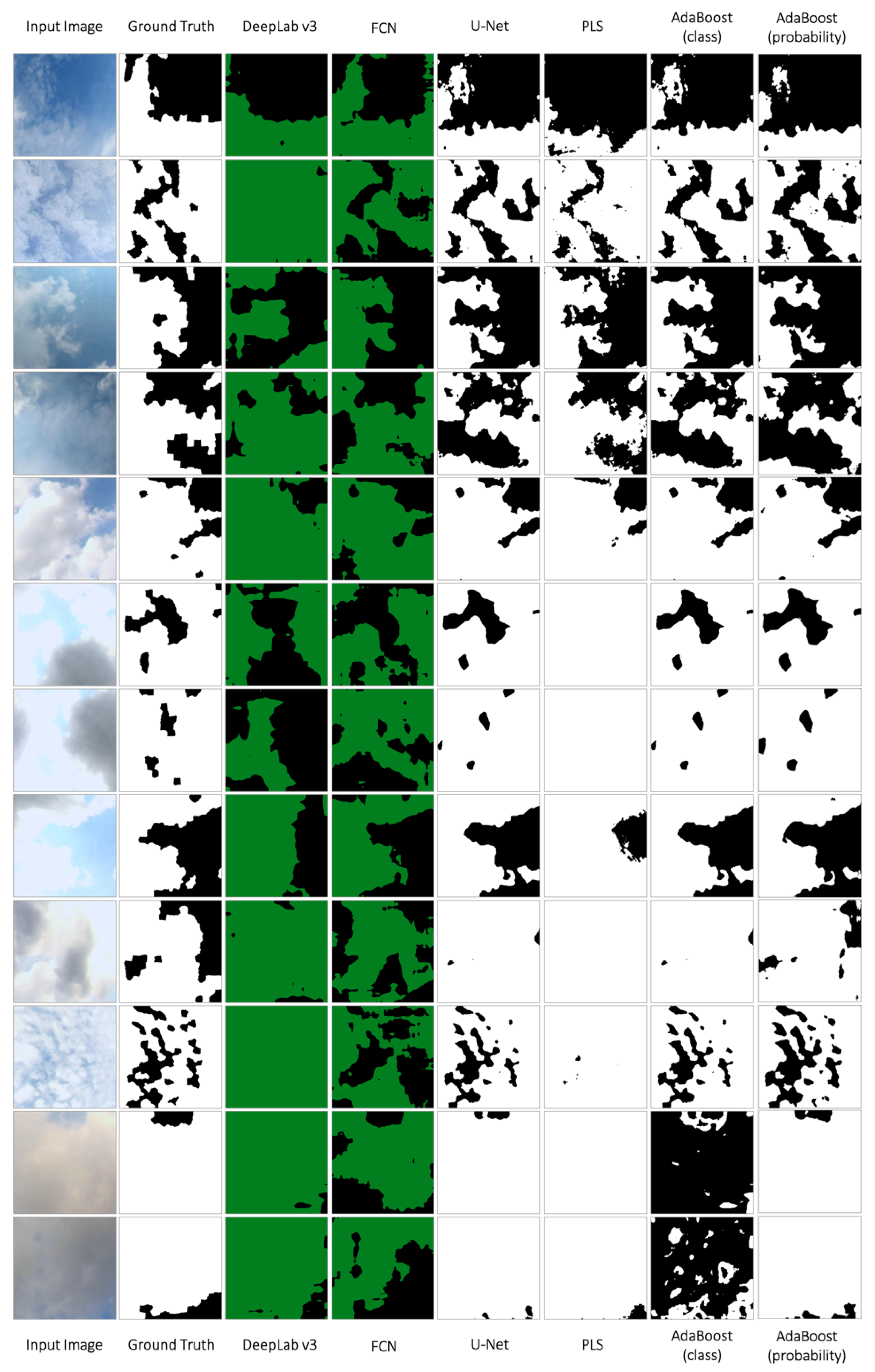
4. Model Validation
5. Solar Irradiance Estimation
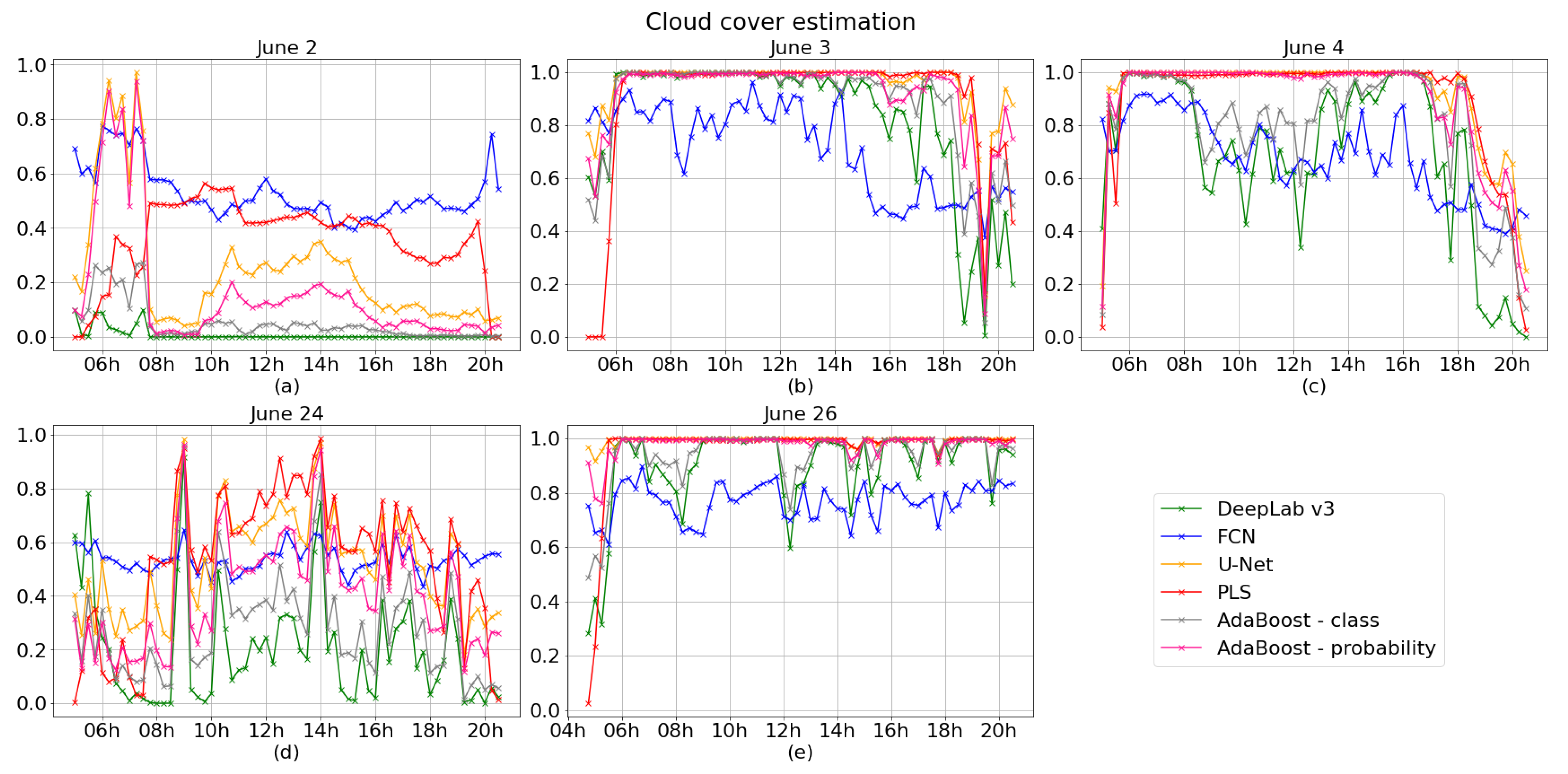
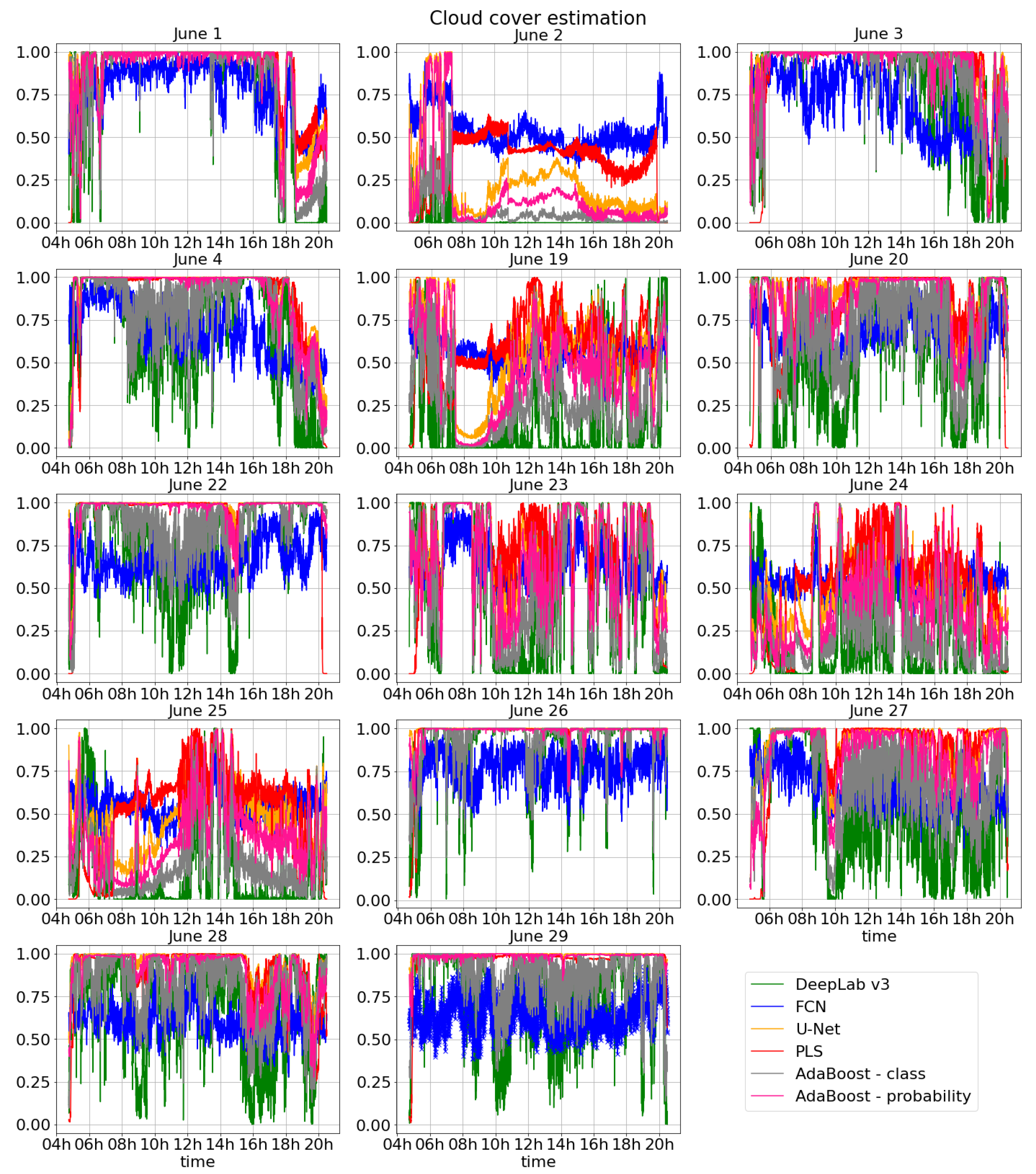
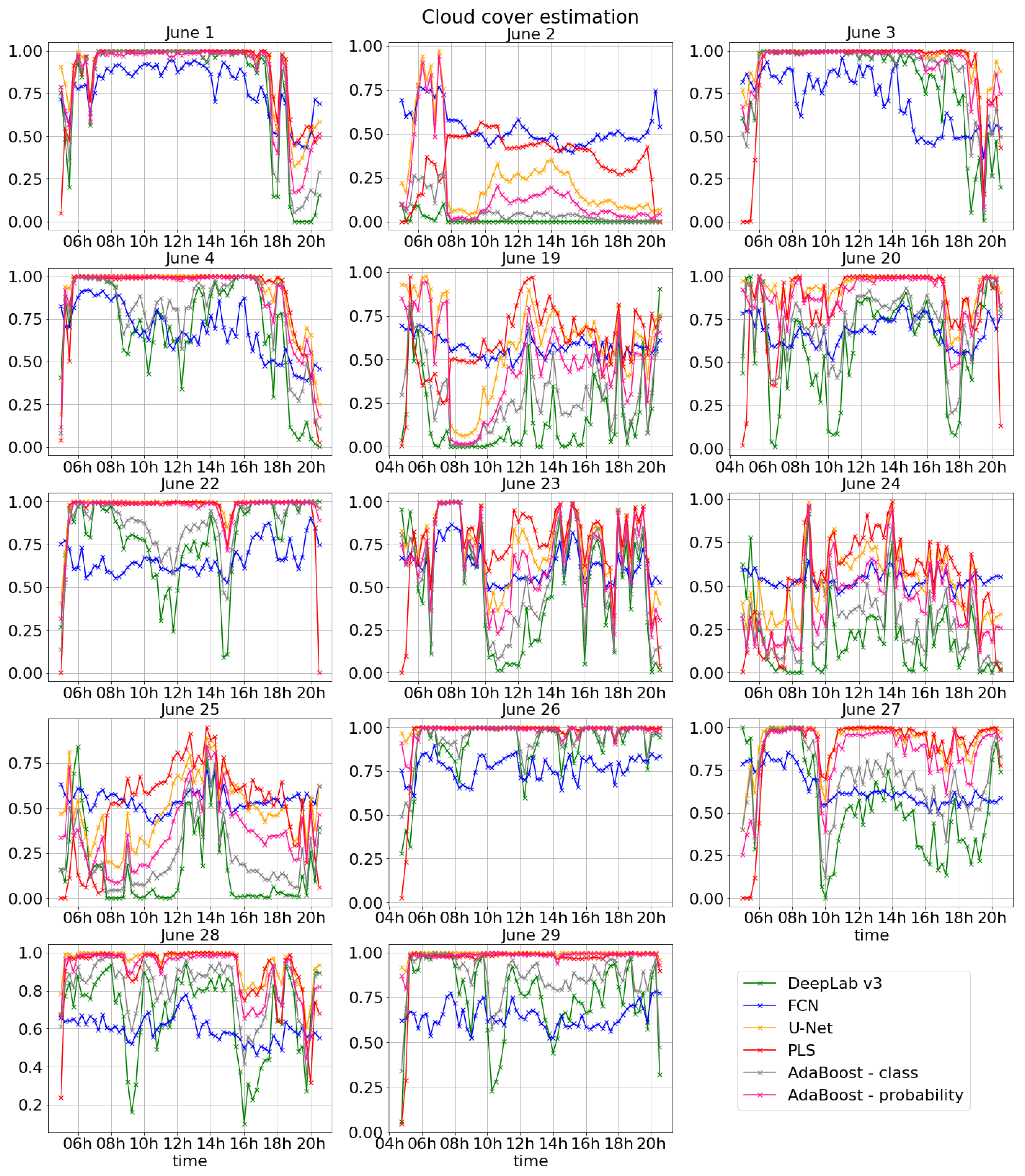
5.1. Cloud Cover Estimation
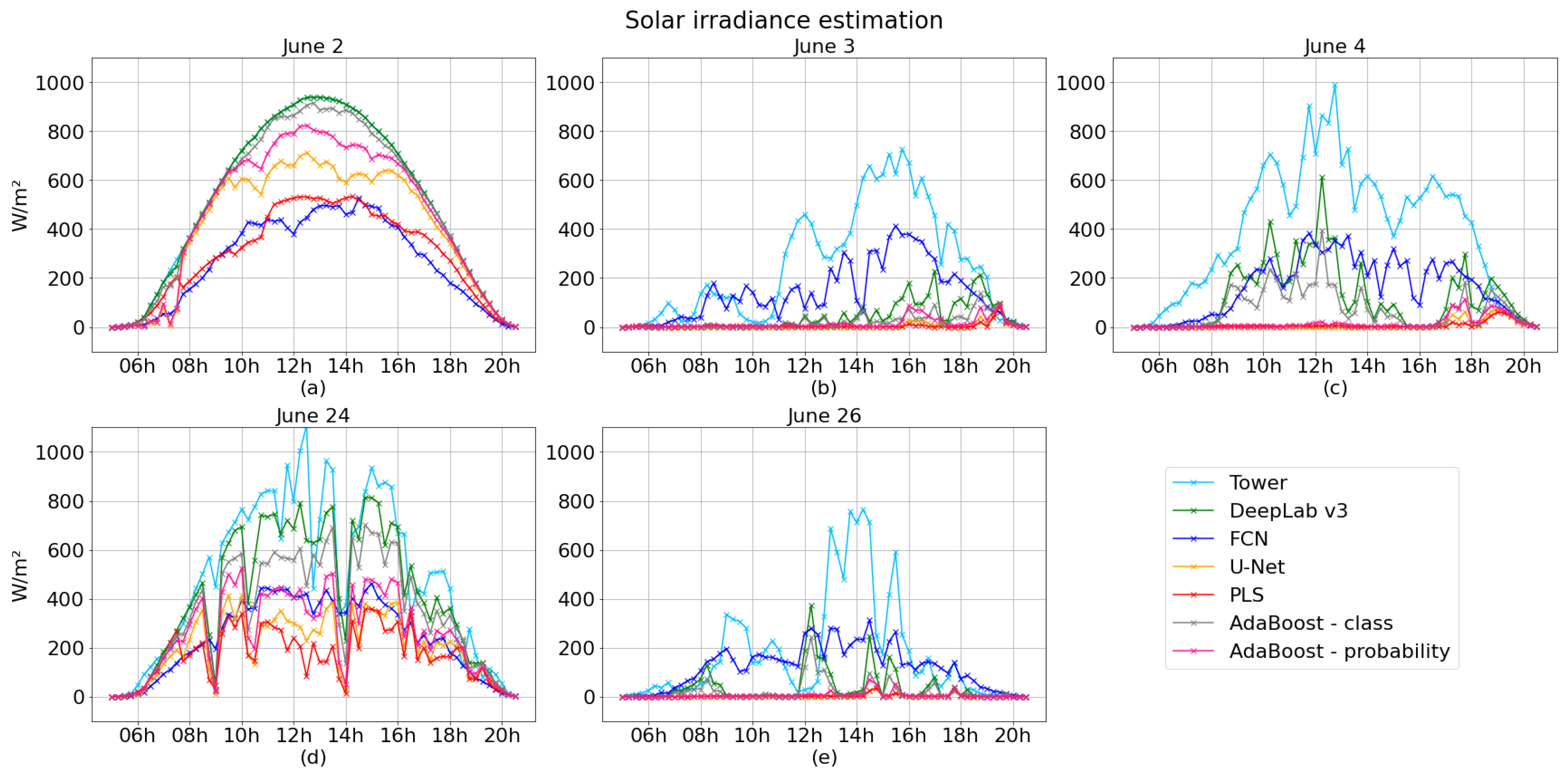
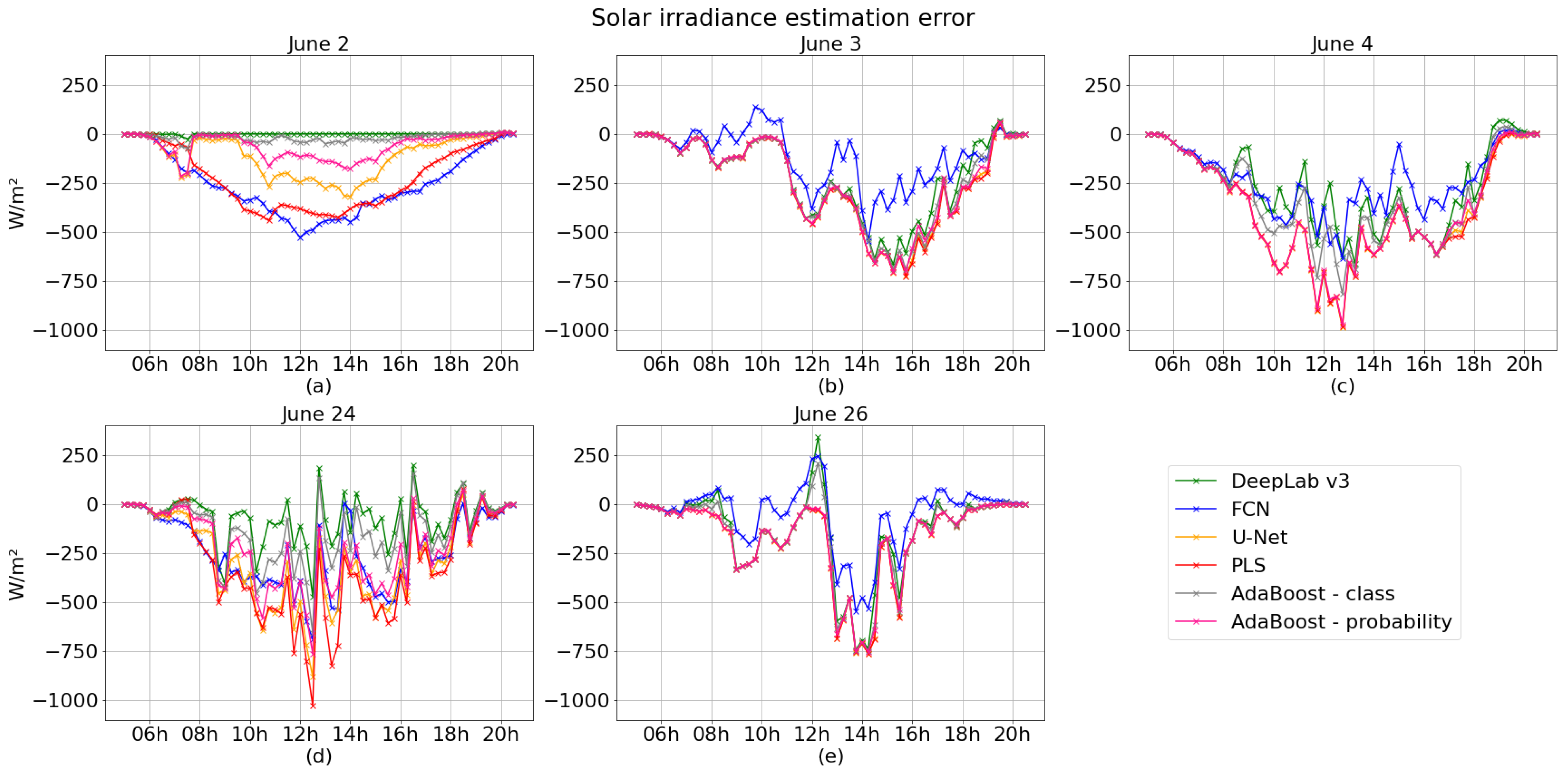
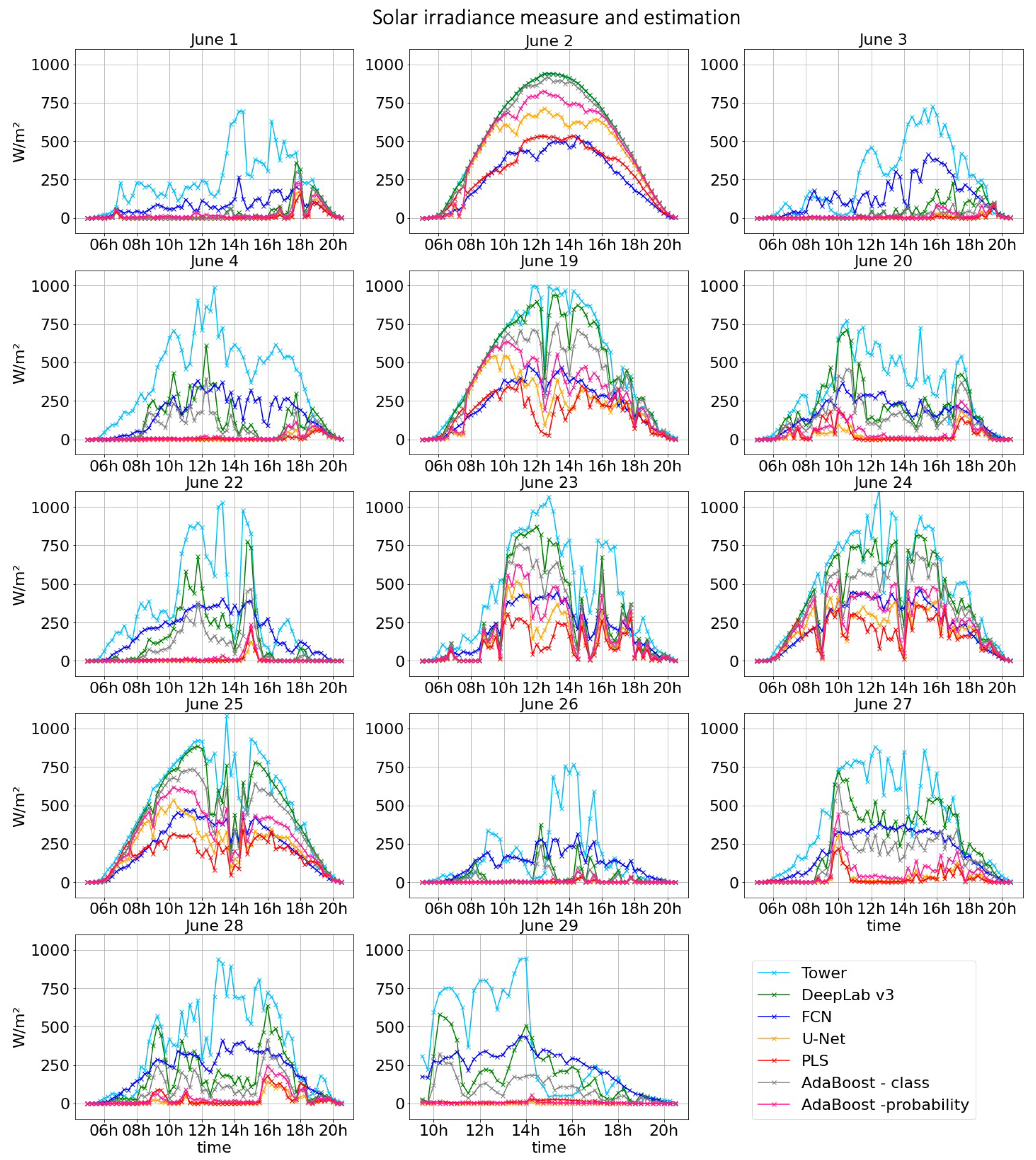
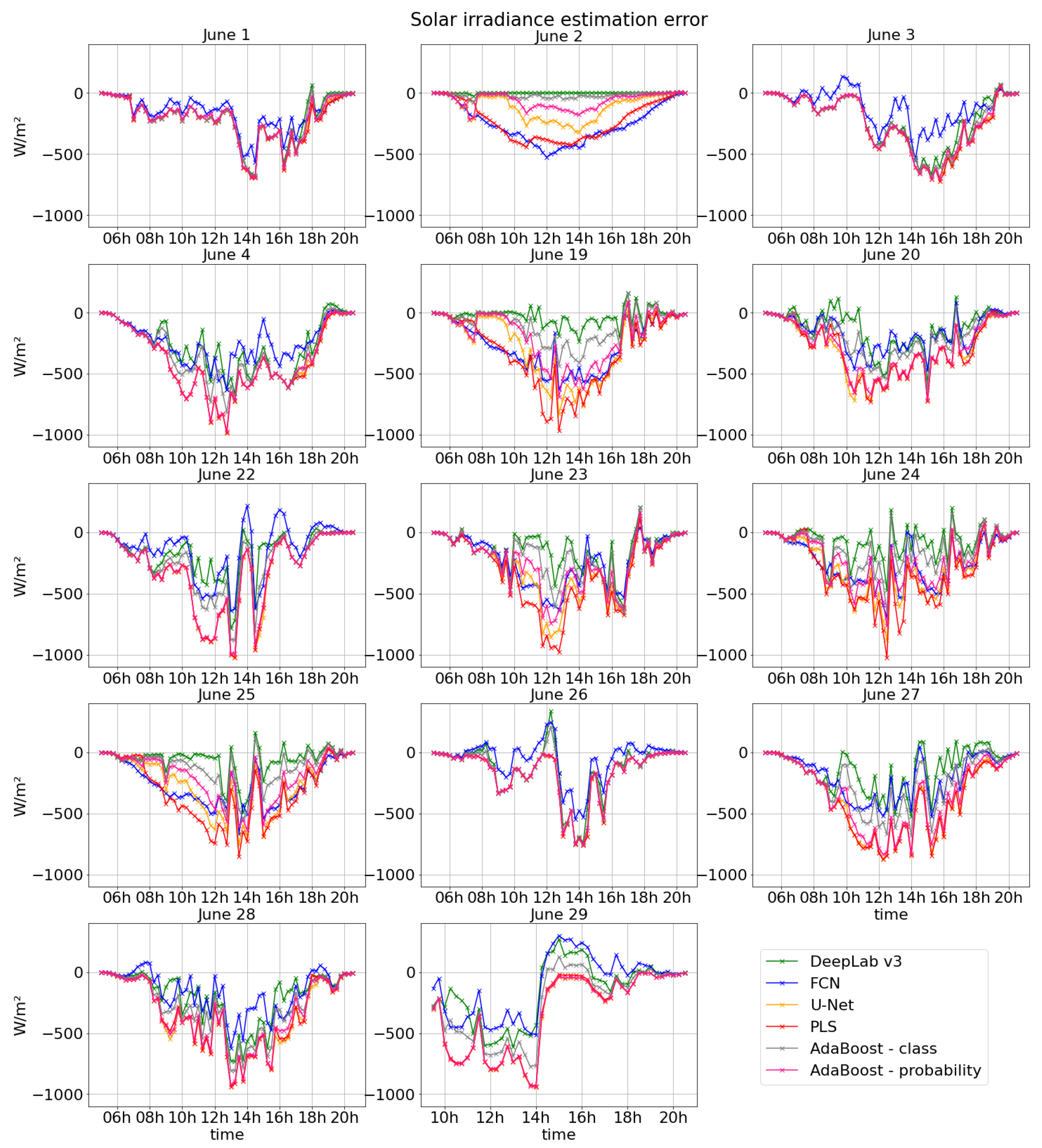
5.2. Solar Irradiance Estimation
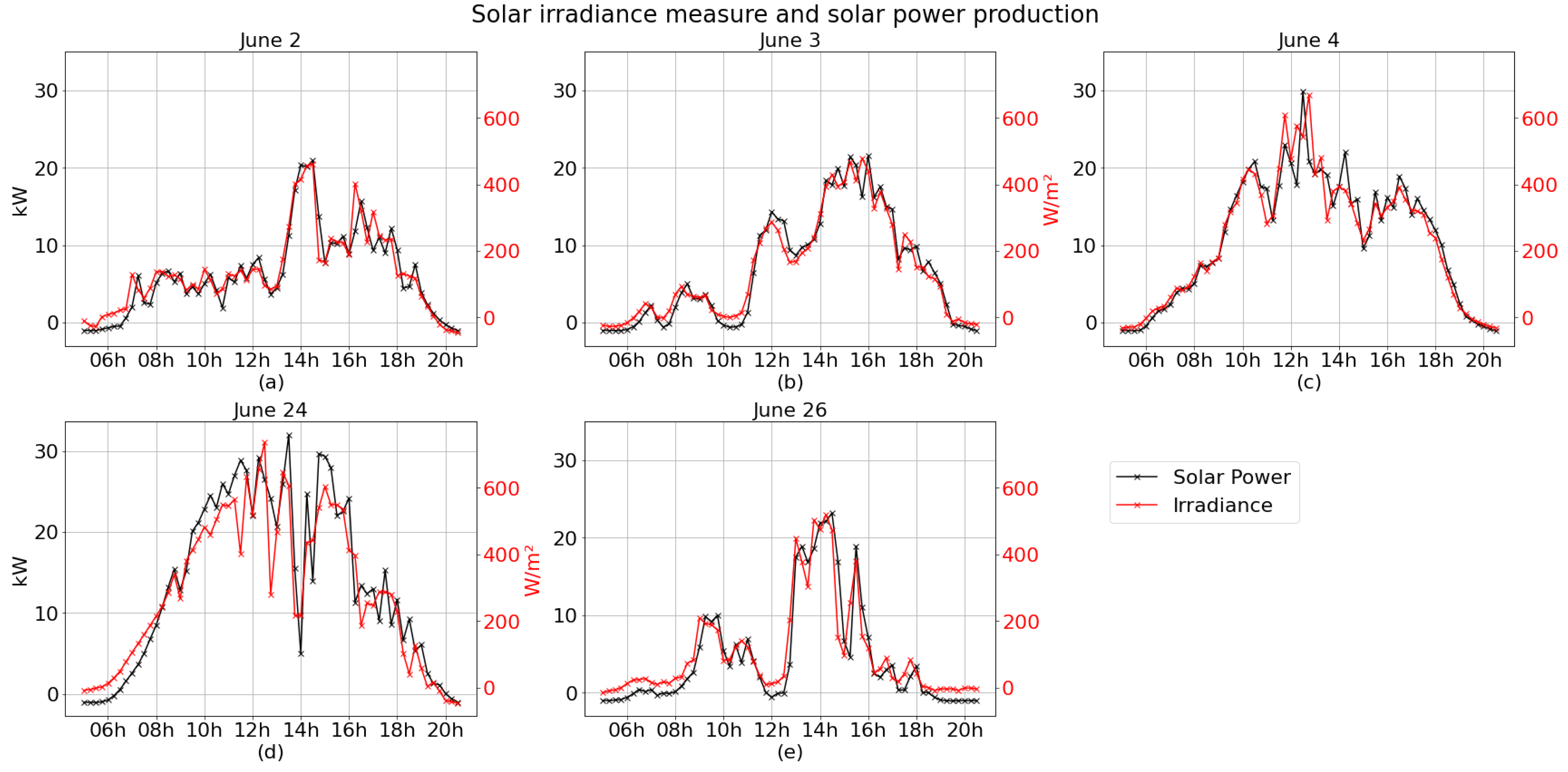
5.3. Solar Power Product Estimation
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Results
Appendix A.1. Cloud Cover Estimation Results


Appendix A.2. Solar Irradiance Estimation Results


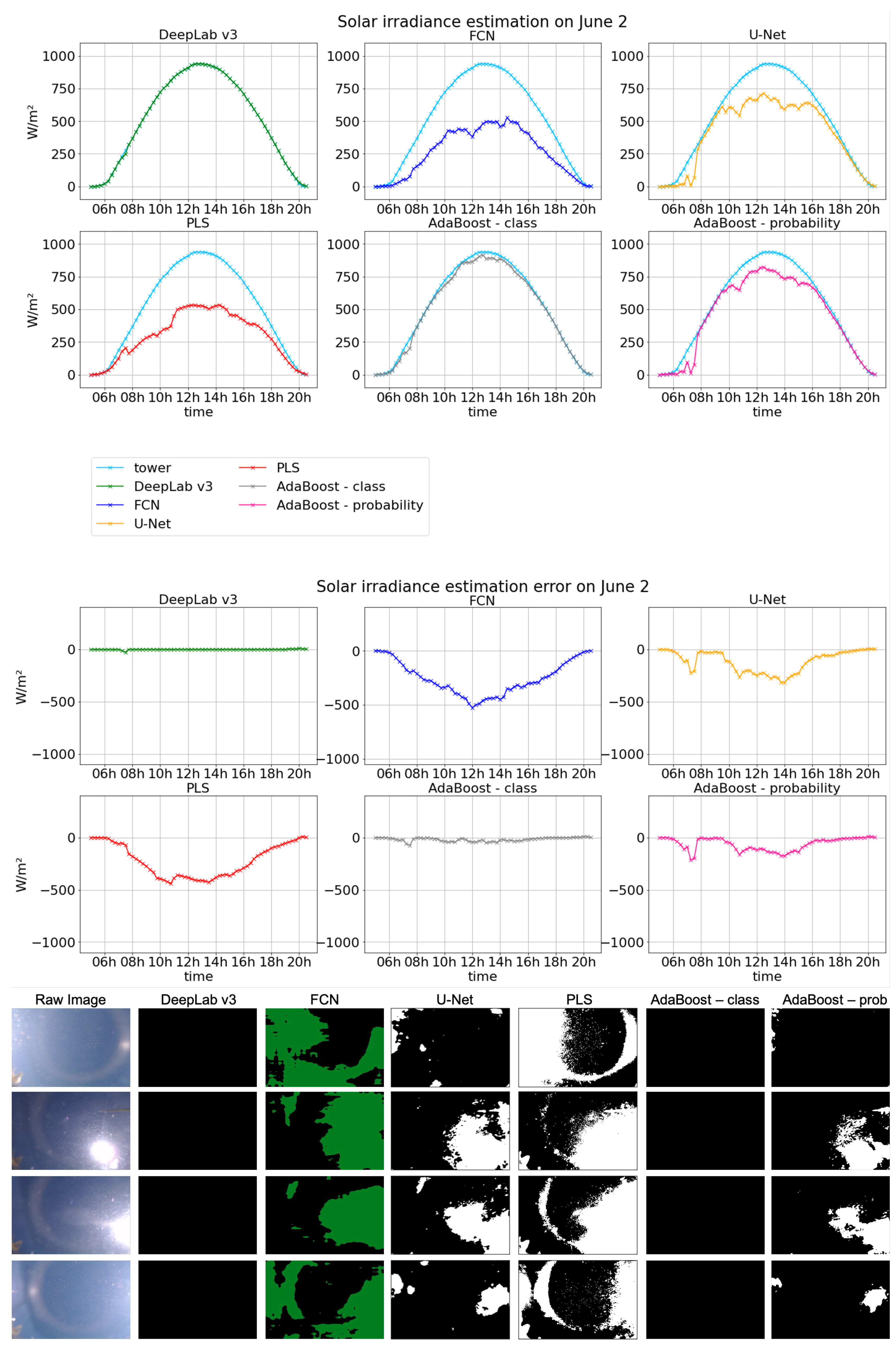
Appendix A.2.1. 2 June 2020

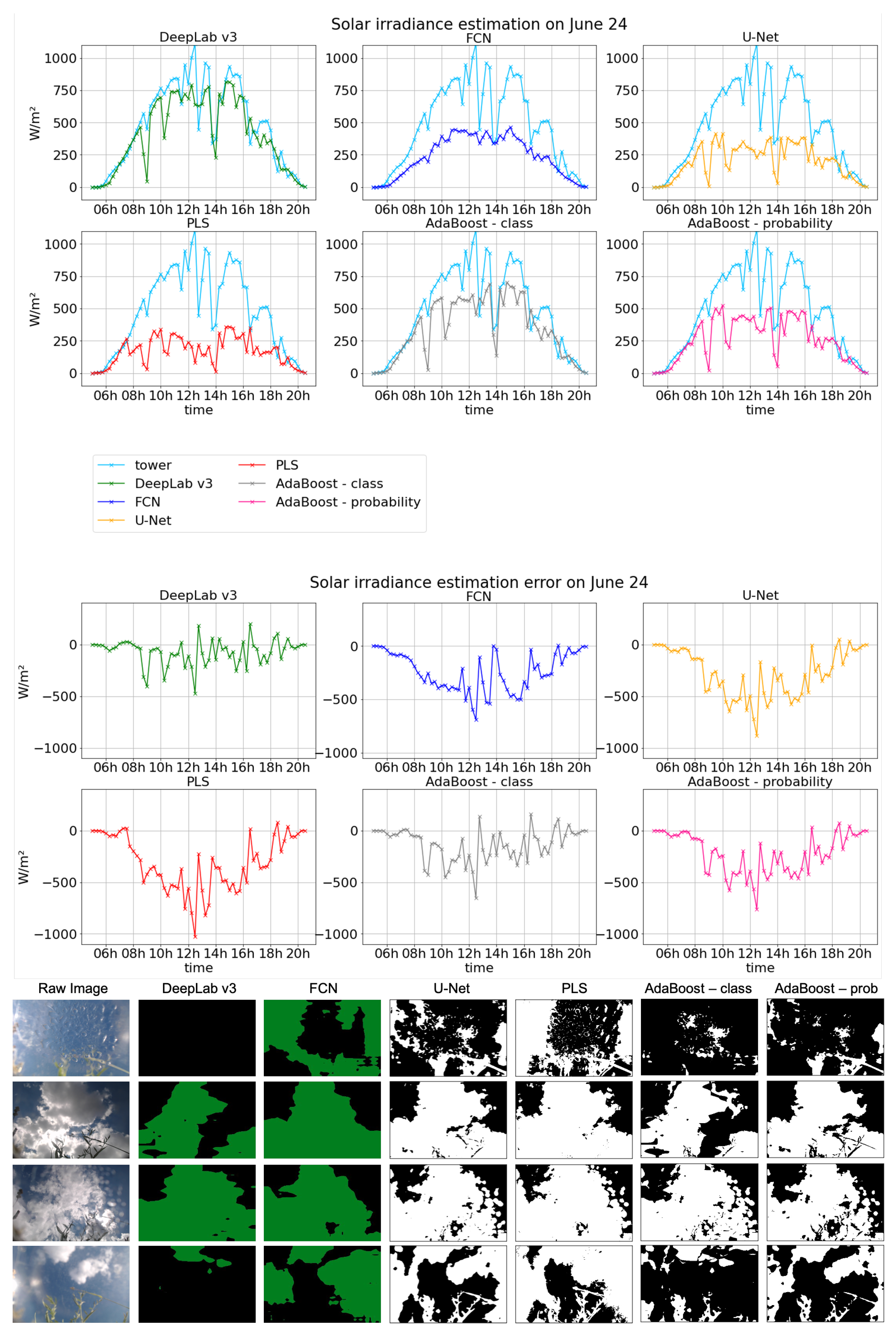
Appendix A.2.2. 24 June 2020

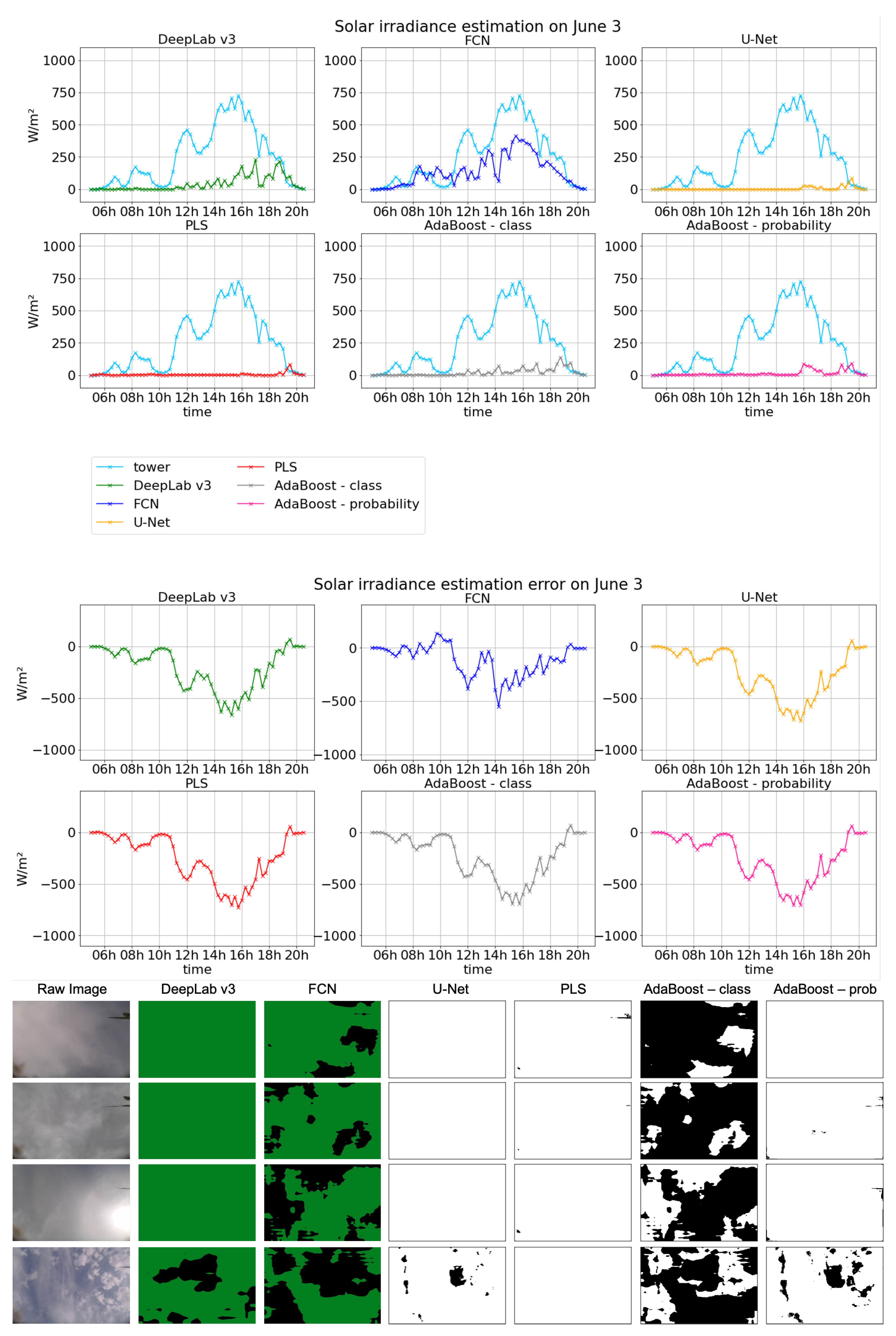
Appendix A.2.3. 3 June 2020

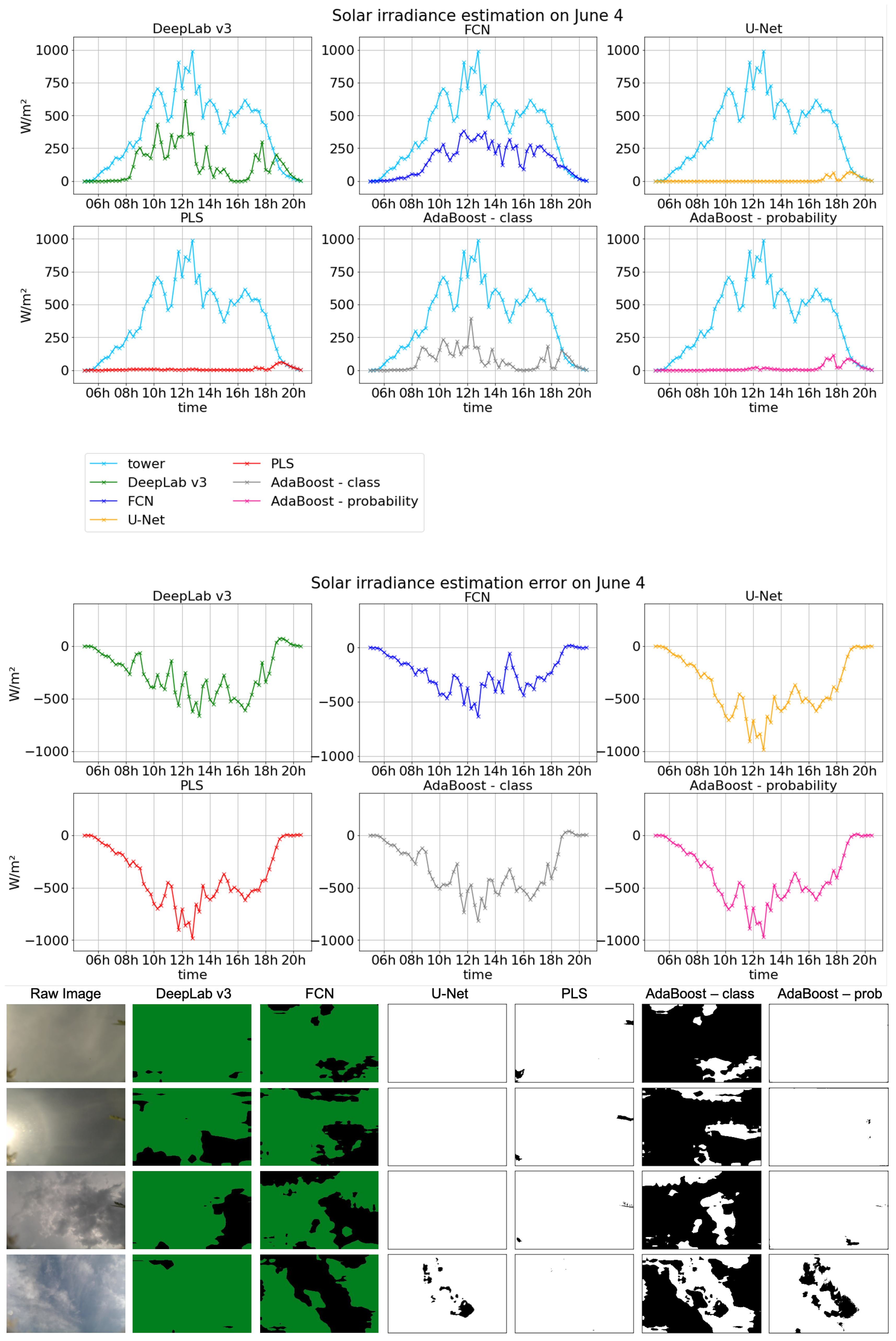
Appendix A.2.4. 4 June 2020

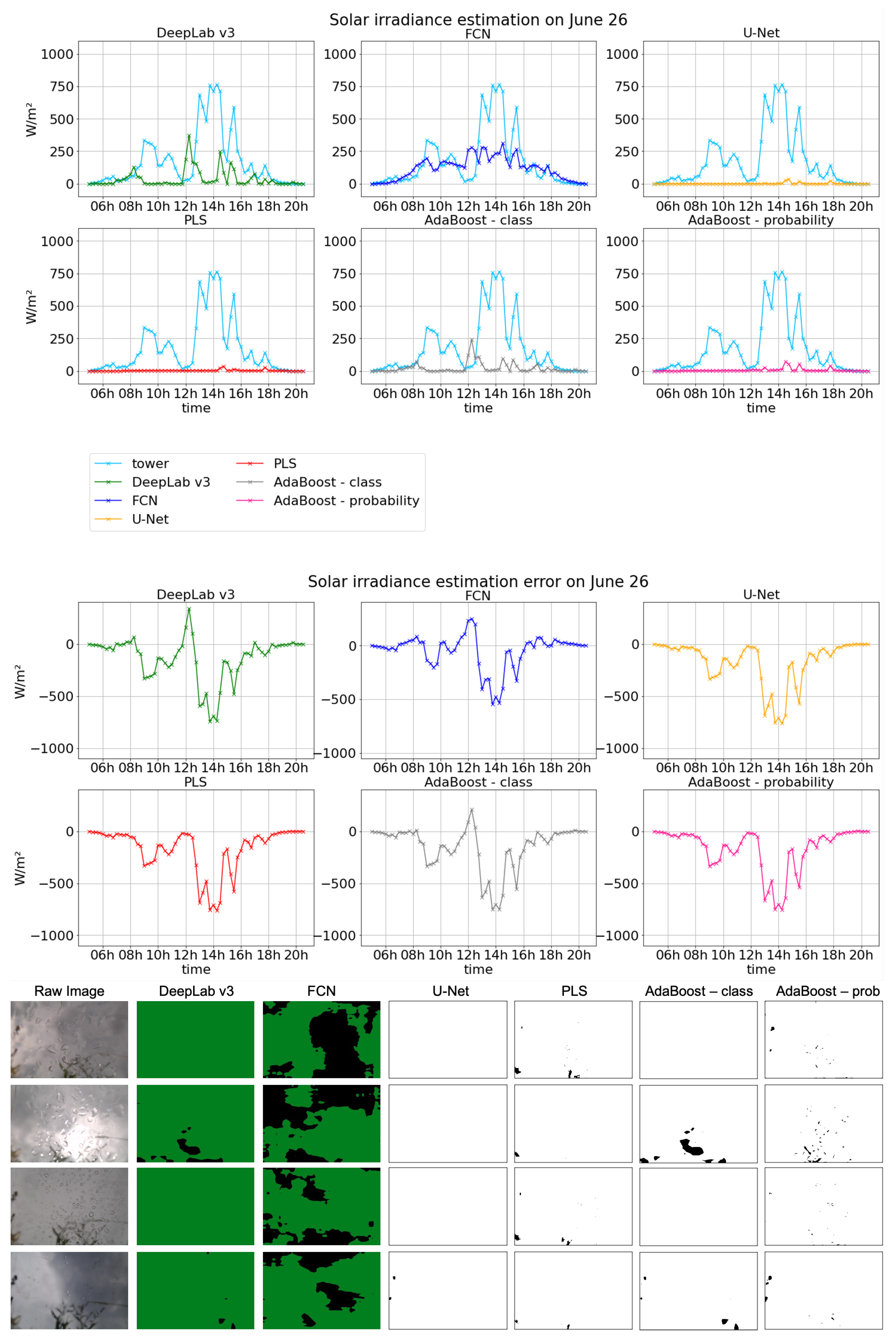
Appendix A.2.5. 26 June 2020

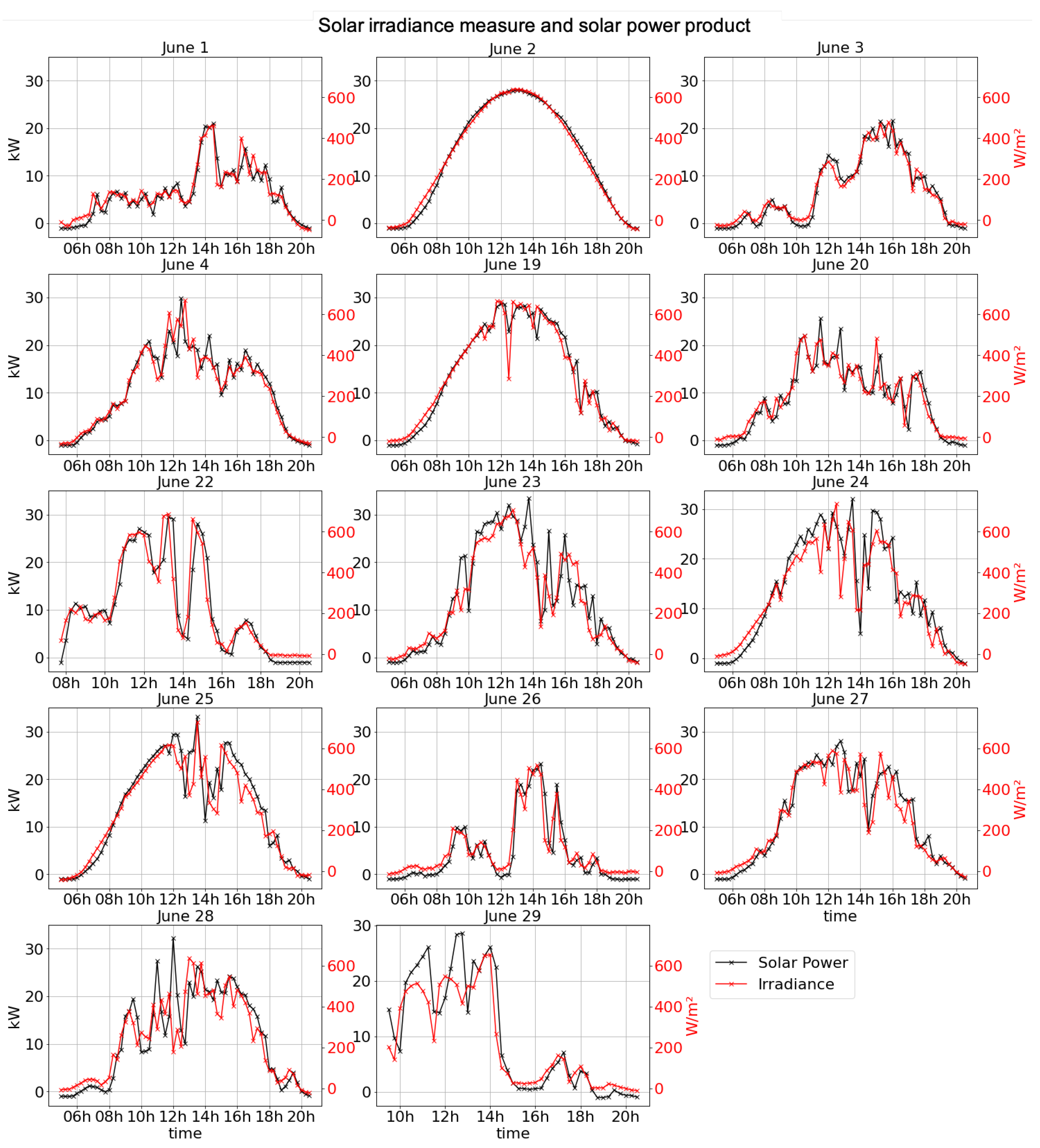
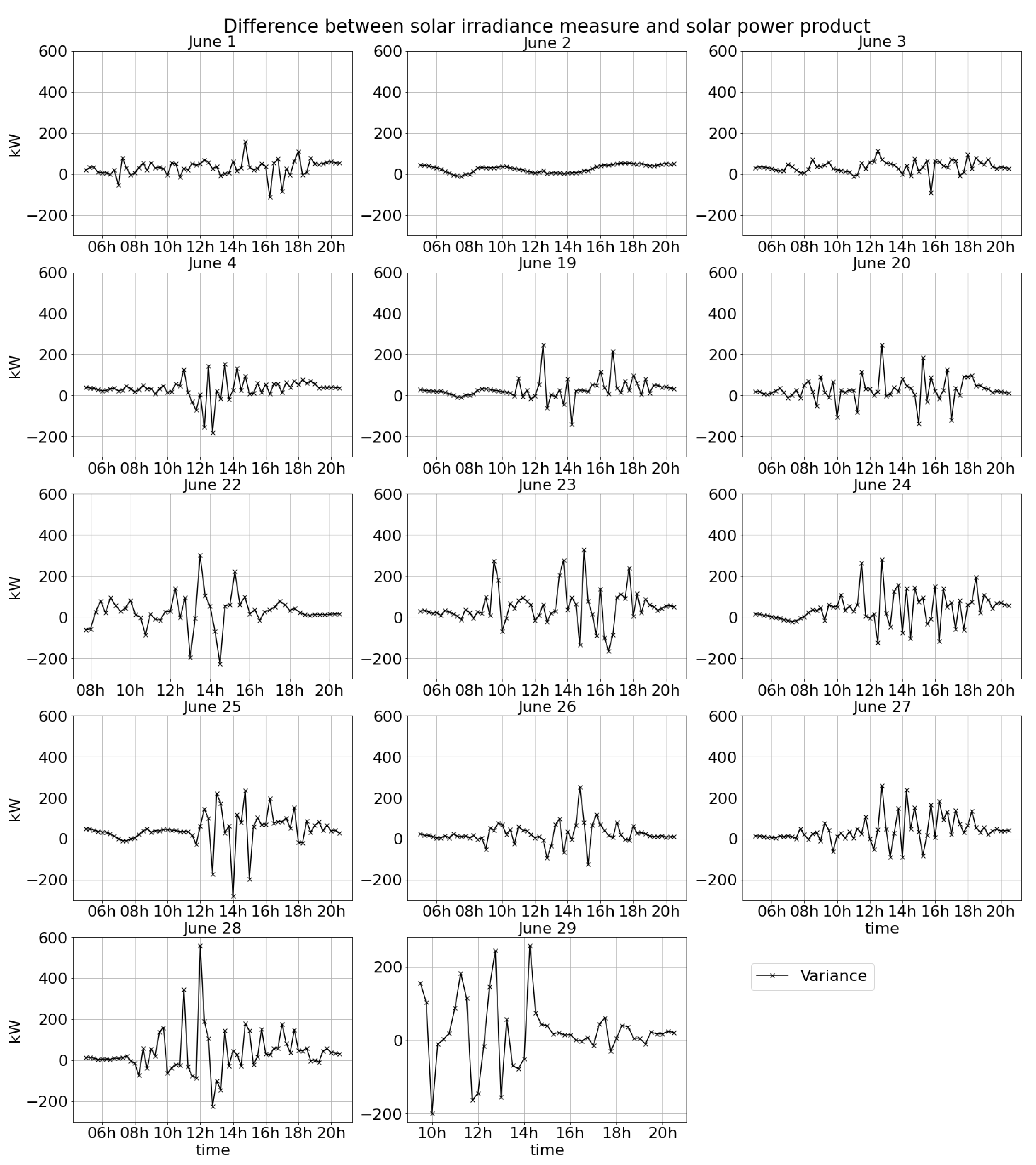
Appendix A.3. Comparison of Solar Irradiance Estimation and Solar Power Production Measure


References
- Glotfelty, T.; Alapaty, K.; He, J.; Hawbecker, P.; Song, X.; Zhang, G. The Weather Research and Forecasting Model with Aerosol–Cloud Interactions (WRF-ACI): Development, Evaluation, and Initial Application. Mon. Weather Rev. 2019, 147, 1491–1511. [Google Scholar] [CrossRef] [PubMed]
- Illingworth, A.J.; Barker, H.; Beljaars, A.; Ceccaldi, M.; Chepfer, H.; Clerbaux, N.; Cole, J.; Delanoë, J.; Domenech, C.; Donovan, D.P. The EarthCARE satellite: The next step forward in global measurements of clouds, aerosols, precipitation, and radiation. Bull. Am. Meteorol. Soc. 2015, 96, 1311–1332. [Google Scholar] [CrossRef] [Green Version]
- Fu, C.L.; Cheng, H.Y. Predicting solar irradiance with all-sky image features via regression. Sol. Energy 2013, 97, 537–550. [Google Scholar] [CrossRef]
- Hollstein, A.; Segl, K.; Guanter, L.; Brell, M.; Enesco, M. Ready-to-use methods for the detection of clouds, cirrus, snow, shadow, water and clear sky pixels in Sentinel-2 MSI images. Remote Sens. 2016, 8, 666. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Wong, M.S.; Zhu, R.; Liu, Z.; Lu, L.; Peng, J.; Tang, Z.; Lo, C.H.; Chan, W.K. Estimation of Hong Kong’s solar energy potential using GIS and remote sensing technologies. Renew. Energy 2016, 99, 325–335. [Google Scholar] [CrossRef]
- Xie, F.; Shi, M.; Shi, Z.; Yin, J.; Zhao, D. Multilevel cloud detection in remote sensing images based on deep learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3631–3640. [Google Scholar] [CrossRef]
- Shi, M.; Xie, F.; Zi, Y.; Yin, J. Cloud detection of remote sensing images by deep learning. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 701–704. [Google Scholar]
- Chu, Y.; Pedro, H.T.; Li, M.; Coimbra, C.F. Real-time forecasting of solar irradiance ramps with smart image processing. Sol. Energy 2015, 114, 91–104. [Google Scholar] [CrossRef]
- Yang, H.; Kurtz, B.; Nguyen, D.; Urquhart, B.; Chow, C.W.; Ghonima, M.; Kleissl, J. Solar irradiance forecasting using a ground-based sky imager developed at UC San Diego. Sol. Energy 2014, 103, 502–524. [Google Scholar] [CrossRef]
- Chow, C.W.; Urquhart, B.; Lave, M.; Dominguez, A.; Kleissl, J.; Shields, J.; Washom, B. Intra-hour forecasting with a total sky imager at the UC San Diego solar energy testbed. Sol. Energy 2011, 85, 2881–2893. [Google Scholar] [CrossRef] [Green Version]
- Richardson, W.; Krishnaswami, H.; Vega, R.; Cervantes, M. A low cost, edge computing, all-sky imager for cloud tracking and intra-hour irradiance forecasting. Sustainability 2017, 9, 482. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Zhang, L.; Zhang, Z.; Wang, C.; Xiao, B. Automatic cloud detection for all-sky images using superpixel segmentation. IEEE Geosci. Remote Sens. Lett. 2014, 12, 354–358. [Google Scholar]
- Marquez, R.; Gueorguiev, V.G.; Coimbra, C.F. Forecasting of global horizontal irradiance using sky cover indices. J. Sol. Energy Eng. 2013, 135, 011017. [Google Scholar] [CrossRef] [Green Version]
- Ghonima, M.; Urquhart, B.; Chow, C.; Shields, J.; Cazorla, A.; Kleissl, J. A method for cloud detection and opacity classification based on ground based sky imagery. Atmos. Meas. Tech. 2012, 5, 2881–2892. [Google Scholar] [CrossRef] [Green Version]
- Kazantzidis, A.; Tzoumanikas, P.; Bais, A.F.; Fotopoulos, S.; Economou, G. Cloud detection and classification with the use of whole-sky ground-based images. Atmos. Res. 2012, 113, 80–88. [Google Scholar] [CrossRef]
- Li, Q.; Lu, W.; Yang, J. A hybrid thresholding algorithm for cloud detection on ground-based color images. J. Atmos. Ocean. Technol. 2011, 28, 1286–1296. [Google Scholar] [CrossRef]
- Dev, S.; Lee, Y.H.; Winkler, S. Color-based segmentation of sky/cloud images from ground-based cameras. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 10, 231–242. [Google Scholar] [CrossRef]
- Dev, S.; Lee, Y.H.; Winkler, S. Systematic study of color spaces and components for the segmentation of sky/cloud images. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 5102–5106. [Google Scholar]
- Moncada, A.; Richardson, W.; Vega-Avila, R. Deep learning to forecast solar irradiance using a six-month UTSA skyimager dataset. Energies 2018, 11, 1988. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Liu, P.; Zhang, F.; Song, Q. CloudNet: Ground-based cloud classification with deep convolutional neural network. Geophys. Res. Lett. 2018, 45, 8665–8672. [Google Scholar] [CrossRef]
- Drönner, J.; Korfhage, N.; Egli, S.; Mühling, M.; Thies, B.; Bendix, J.; Freisleben, B.; Seeger, B. Fast cloud segmentation using convolutional neural networks. Remote Sens. 2018, 10, 1782. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Lu, Z.; Zhou, Q.; Xu, Z. A Cloud Detection Algorithm with Reduction of Sunlight Interference in Ground-Based Sky Images. Atmosphere 2019, 10, 640. [Google Scholar] [CrossRef] [Green Version]
- Flickr. Available online: https://www.flickr.com (accessed on 11 February 2021).
- Onishi, R.; Sugiyama, D. Deep convolutional neural network for cloud coverage estimation from snapshot camera images. SOLA 2017, 13, 235–239. [Google Scholar] [CrossRef] [Green Version]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: New York, NY, USA, 2015; pp. 234–241. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Keahey, K.; Mambretti, J.; Ruth, P.; Stanzione, D. Chameleon: A Large-Scale, Deeply Reconfigurable Testbed for Computer Science Research. In Proceedings of the 2019 IEEE 27th International Conference on Network Protocols (ICNP), Chicago, IL, USA, 8–10 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–2. [Google Scholar]
- Chameleonurl. Available online: https://www.chameleoncloud.org (accessed on 11 February 2021).
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; Springer: New York, NY, USA, 2018; pp. 801–818. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krähenbühl, P.; Koltun, V. Efficient inference in fully connected CRFs with Gaussian edge potentials. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2011; pp. 109–117. [Google Scholar]
- Schapire, R.E. Explaining AdaBoost. In Empirical Inference; Springer: New York, NY, USA, 2013; pp. 37–52. [Google Scholar]
- Beckman, P.; Sankaran, R.; Catlett, C.; Ferrier, N.; Jacob, R.; Papka, M. Waggle: An open sensor platform for edge computing. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–3. [Google Scholar]
- Metower. Available online: https://www.atmos.anl.gov/ANLMET/index.html (accessed on 11 February 2021).
- Plaza. Available online: https://dashboard.ioc.anl.gov/viewer.html?proj=Argonne (accessed on 11 February 2021).
- Martins, F.; Silva, S.; Pereira, E.; Abreu, S. The influence of cloud cover index on the accuracy of solar irradiance model estimates. Meteorol. Atmos. Phys. 2008, 99, 169–180. [Google Scholar] [CrossRef]
- Lengfeld, K.; Macke, A.; Feister, U.; Güldner, J. Parameterization of solar radiation from model and observations. Meteorol. Z. 2010, 19, 25–33. [Google Scholar] [CrossRef] [Green Version]
- Badescu, V.; Dumitrescu, A. New types of simple non-linear models to compute solar global irradiance from cloud cover amount. J. Atmos. Sol. Terr. Phys. 2014, 117, 54–70. [Google Scholar] [CrossRef]
- Beckman, P.; Catlett, C.; Altintas, I.; Kelly, E.; Collis, S. Mid-Scale RI-1: SAGE: A Software-Defined Sensor Network (NSF OAC 1935984). 2019. Available online: https://sagecontinuum.org/ (accessed on 11 February 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | mIoU | mAP | mAR |
|---|---|---|---|
| PLS | 0.6467 | 0.8961 | 0.6991 |
| FCN | 0.5649 | 0.8974 | 0.6040 |
| U-Net | 0.7626 | 0.9869 | 0.7703 |
| DeepLab | 0.5335 | 0.9234 | 0.5582 |
| AdaBoost (class) | 0.6128 | 0.8494 | 0.6875 |
| AdaBoost (probability) | 0.5856 | 0.8646 | 0.6448 |
| Date | 6/1 | 6/2 | 6/3 | 6/4 | 6/19 | 6/20 | 6/22 |
|---|---|---|---|---|---|---|---|
| Number of Images | 3776 | 3773 | 3763 | 3759 | 3837 | 3761 | 3058 |
| Date | 6/23 | 6/24 | 6/25 | 6/26 | 6/27 | 6/28 | 6/29 |
| Number of Images | 3777 | 3757 | 3778 | 3775 | 3771 | 3759 | 2639 |
| Model | Mean Error (%) | RMSE (W/m) | ||||
|---|---|---|---|---|---|---|
| Clear | Partially Cloudy | Cloudy | Clear | Partially Cloudy | Cloudy | |
| FCN | 48.75 | 56.94 | 54.60 | 296.19 | 300.02 | 219.16 |
| U-Net | 21.81 | 69.43 | 92.88 | 152.64 | 357.84 | 367.88 |
| PLS | 42.69 | 76.90 | 93.22 | 269.89 | 404.02 | 367.97 |
| DeepLab | 0.22 | 33.82 | 62.57 | 4.09 | 142.83 | 295.47 |
| AdaBoost (class) | 12.01 | 60.47 | 88.22 | 25.77 | 208.90 | 328.25 |
| AdaBoost (probability) | 3.58 | 44.30 | 74.89 | 88.18 | 292.71 | 360.50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Kim, Y.; Ferrier, N.J.; Collis, S.M.; Sankaran, R.; Beckman, P.H. Prediction of Solar Irradiance and Photovoltaic Solar Energy Product Based on Cloud Coverage Estimation Using Machine Learning Methods. Atmosphere 2021, 12, 395. https://doi.org/10.3390/atmos12030395
Park S, Kim Y, Ferrier NJ, Collis SM, Sankaran R, Beckman PH. Prediction of Solar Irradiance and Photovoltaic Solar Energy Product Based on Cloud Coverage Estimation Using Machine Learning Methods. Atmosphere. 2021; 12(3):395. https://doi.org/10.3390/atmos12030395
Chicago/Turabian StylePark, Seongha, Yongho Kim, Nicola J. Ferrier, Scott M. Collis, Rajesh Sankaran, and Pete H. Beckman. 2021. "Prediction of Solar Irradiance and Photovoltaic Solar Energy Product Based on Cloud Coverage Estimation Using Machine Learning Methods" Atmosphere 12, no. 3: 395. https://doi.org/10.3390/atmos12030395
APA StylePark, S., Kim, Y., Ferrier, N. J., Collis, S. M., Sankaran, R., & Beckman, P. H. (2021). Prediction of Solar Irradiance and Photovoltaic Solar Energy Product Based on Cloud Coverage Estimation Using Machine Learning Methods. Atmosphere, 12(3), 395. https://doi.org/10.3390/atmos12030395