
Quantify the Spatial Association between the Distribution of Catering Business and Urban Spaces in London Using Catering POI Data and Image Segmentation



Abstract
:1. Introduction
1.1. Food-Related Urbanism
1.2. Spatial Distribution—Point Pattern Analysis
1.3. Classification and Quantification of Urban Space
1.4. The Application of Machine Learning Methods in Urban Analytics
1.5. The Derived Relationship between Catering and Urban Space
1.6. Research, Objective, Question, and Significance
- How do the three types of urban space (open, landscape, and conflict) relate to catering distribution?
- What is the proportion of each type of urban space associated with catering distribution?
2. Research Methods
2.1. Study Area
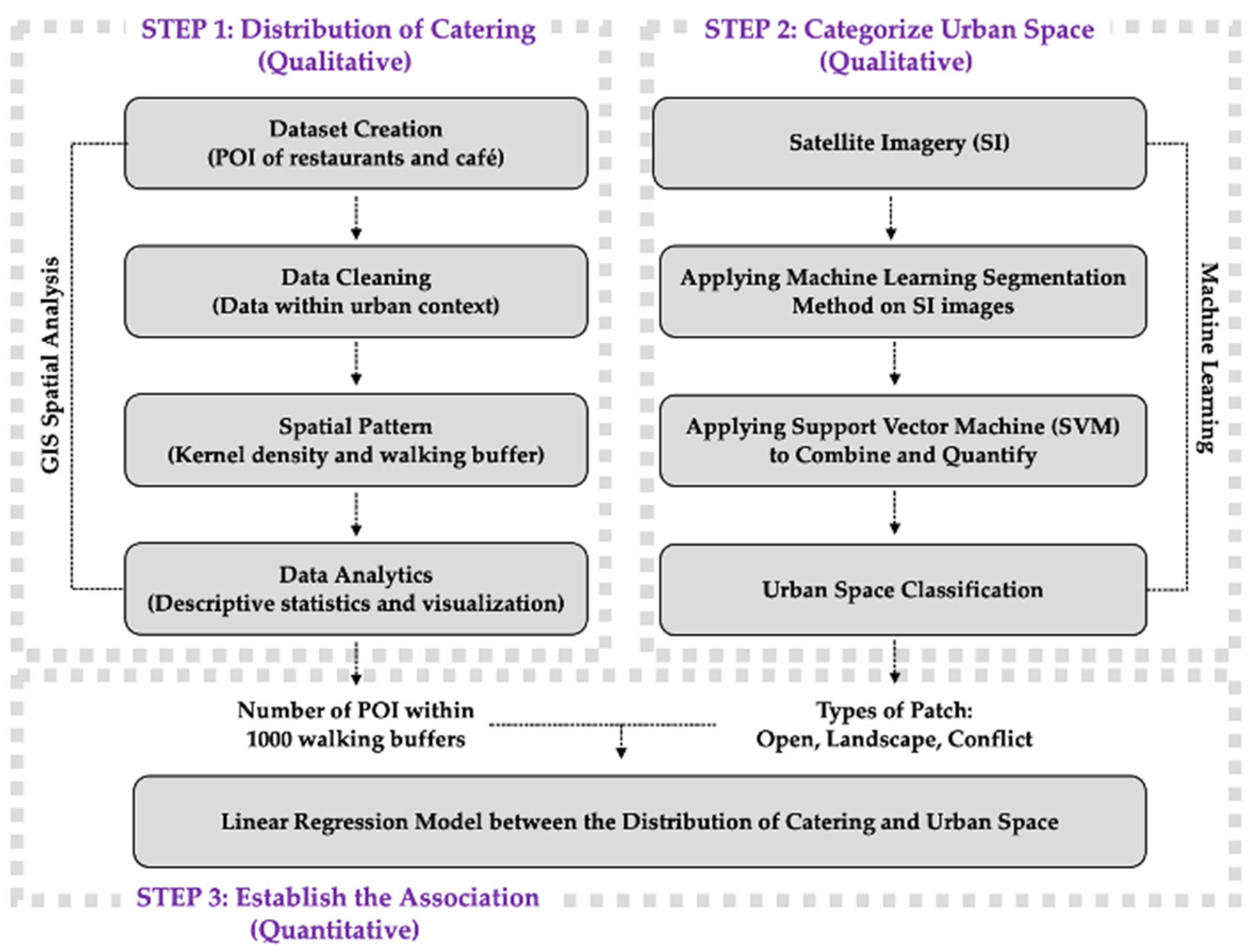
2.2. Research Process
3. Result and Discussion
3.1. Spatial Distribution of the Catering Business
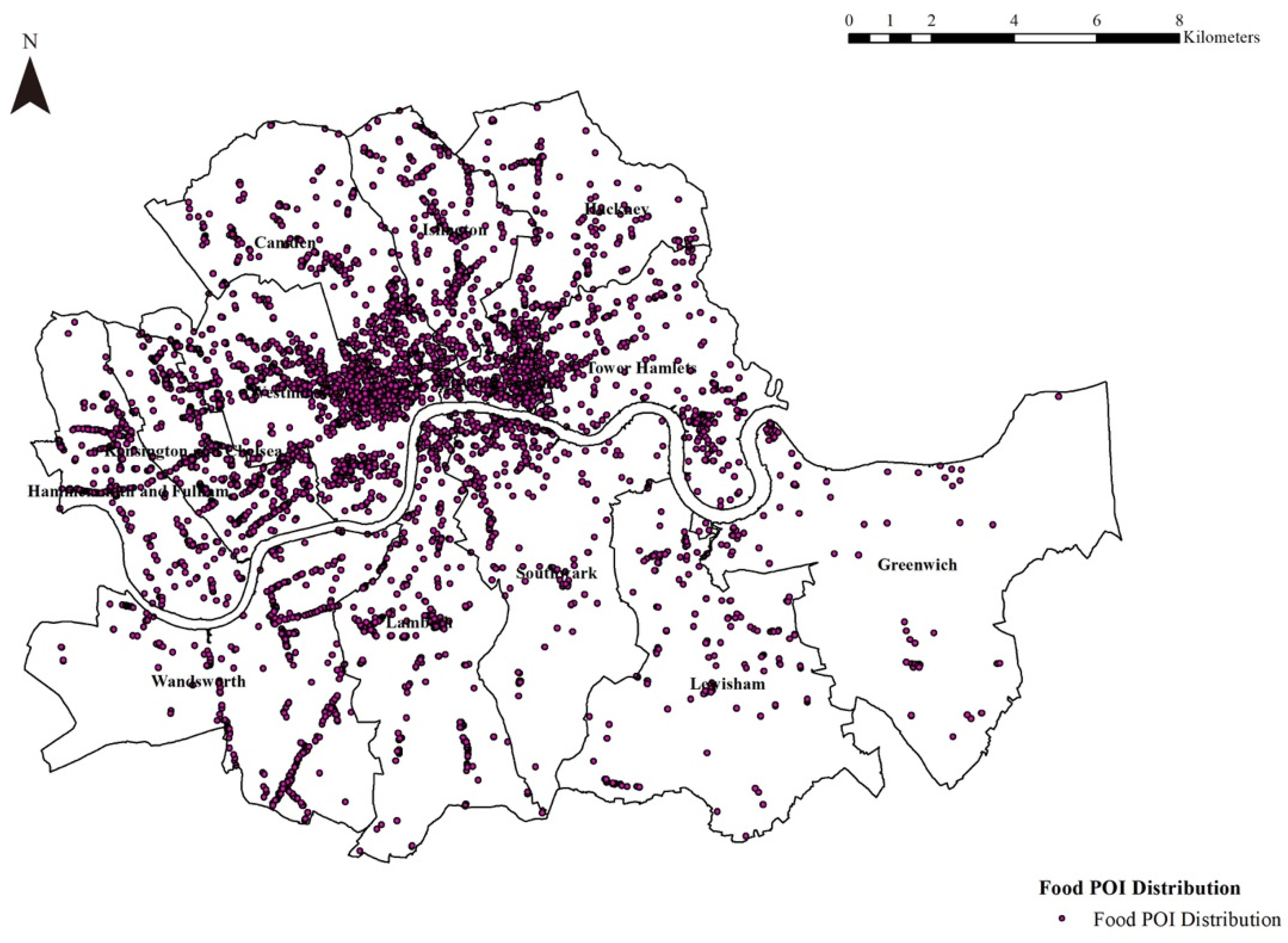
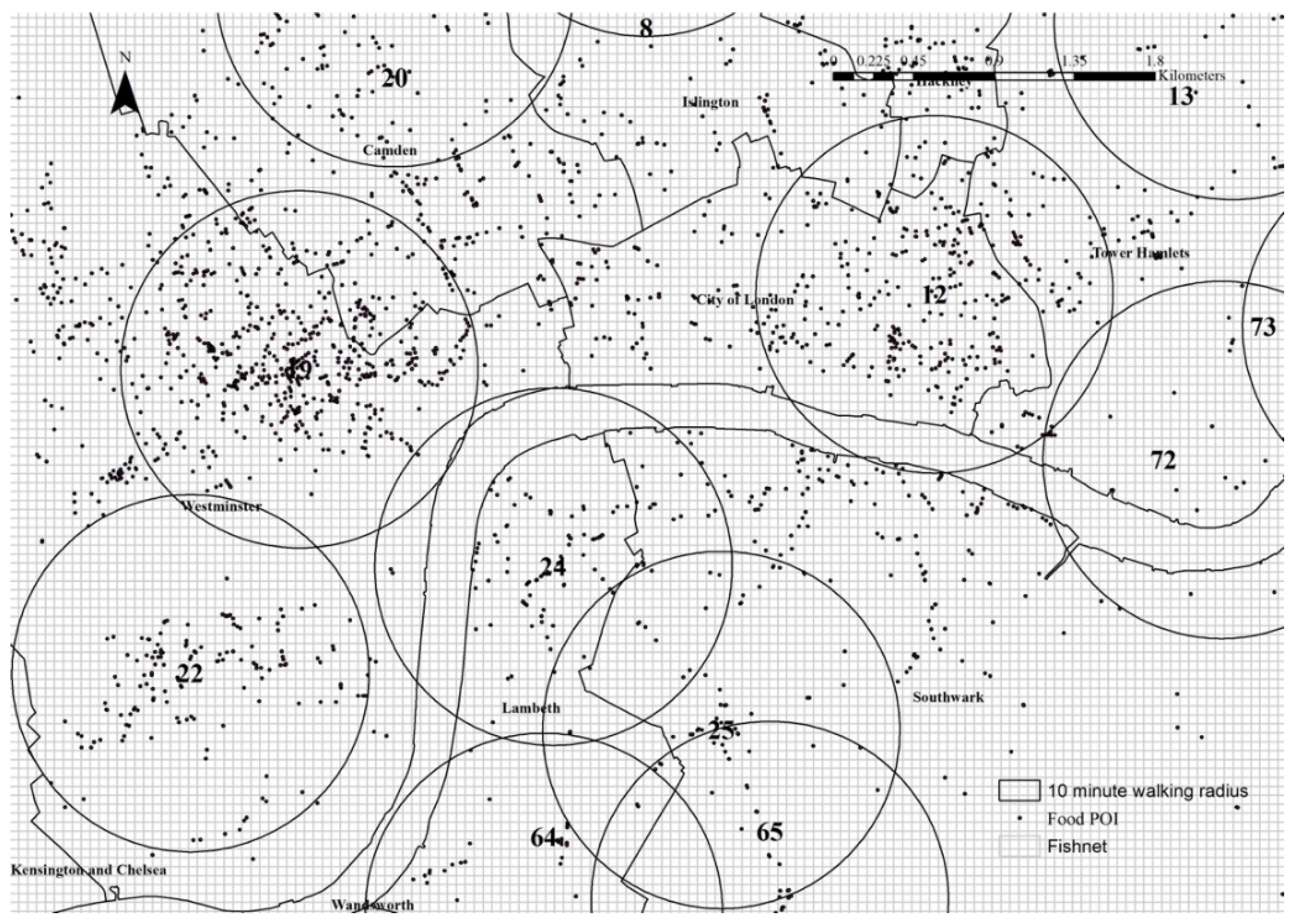
3.1.1. Dataset Creation and Cleaning–Distribution of Catering POI
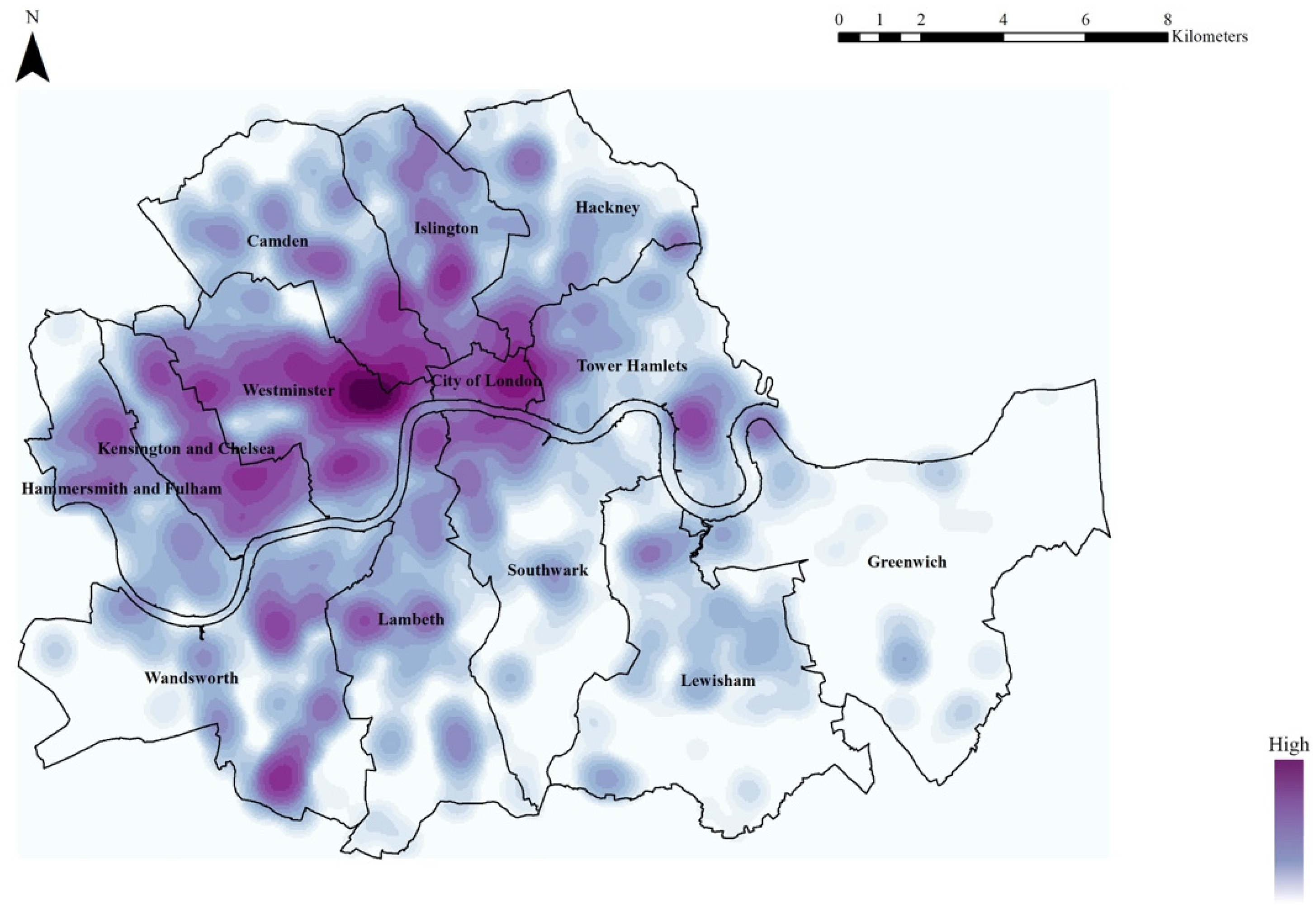
3.1.2. Spatial Pattern: Kernel Density Estimation
- are the input points. Only include points in the sum if they are within the radius distance of the (x, y) location.
- is the population field value of point i, which is an optional parameter.
- is the distance between point and the (x, y) location.
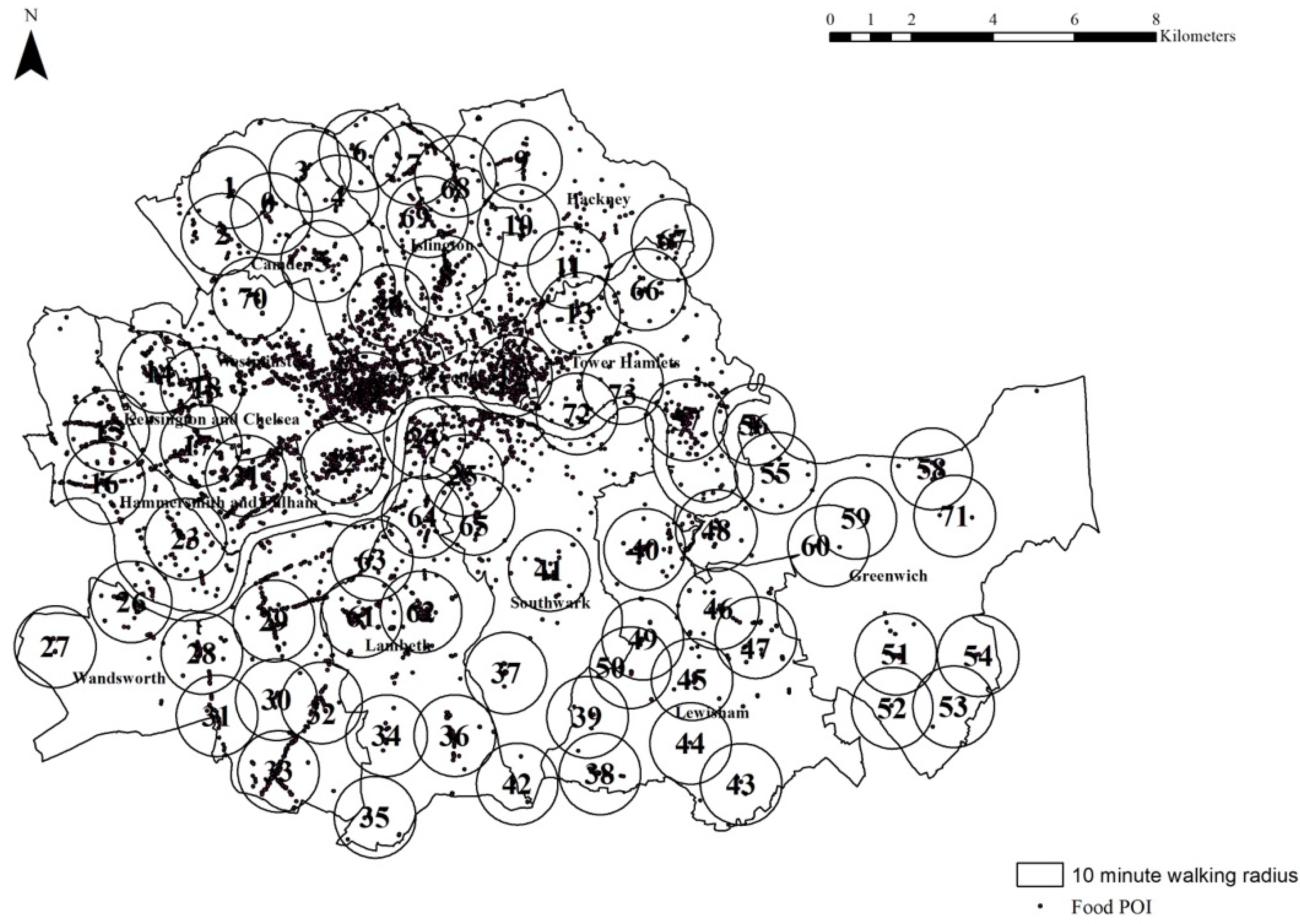
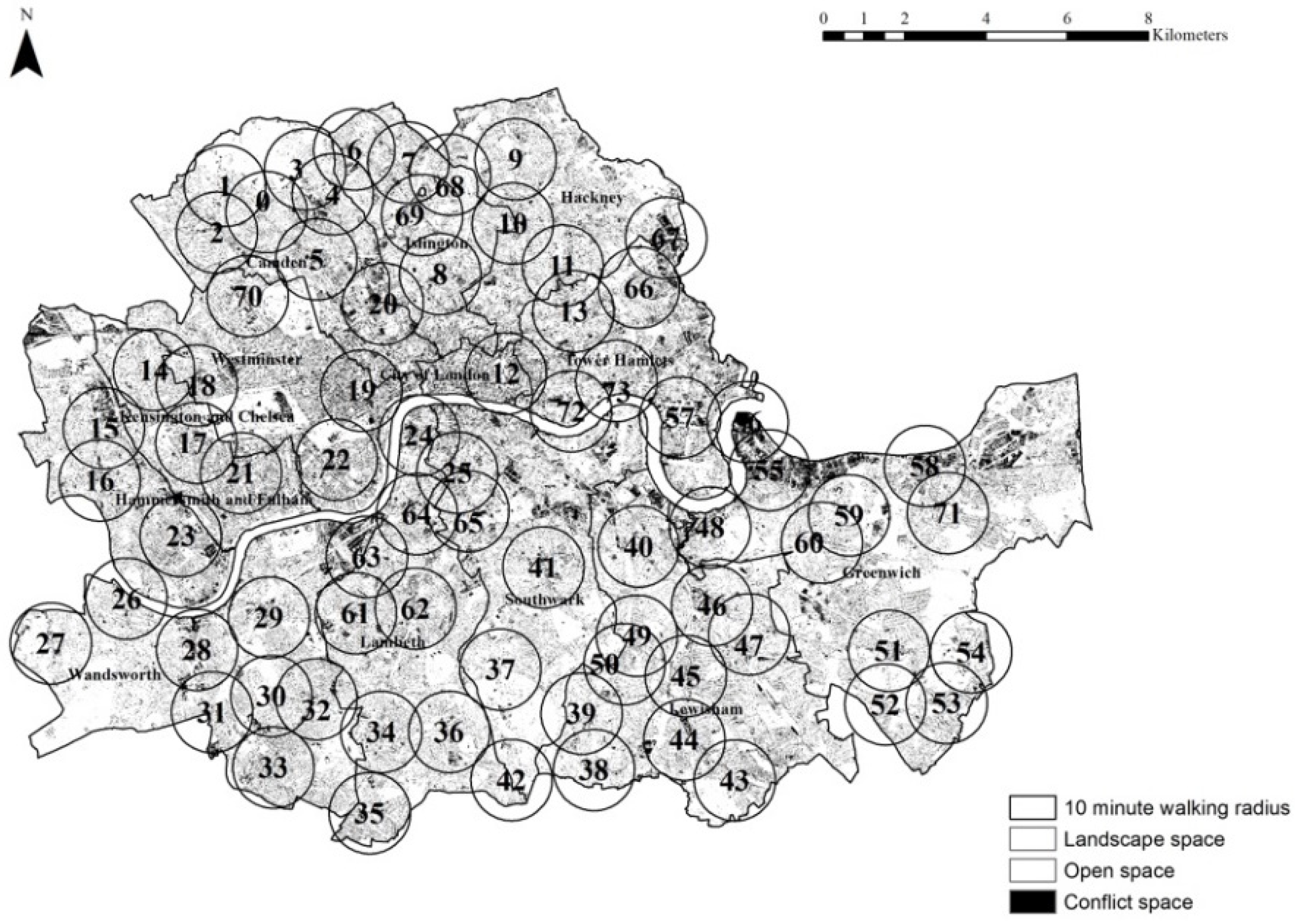
3.1.3. High-Density Food Hub Buffer
3.2. Categorization and Quantification of Urban Space
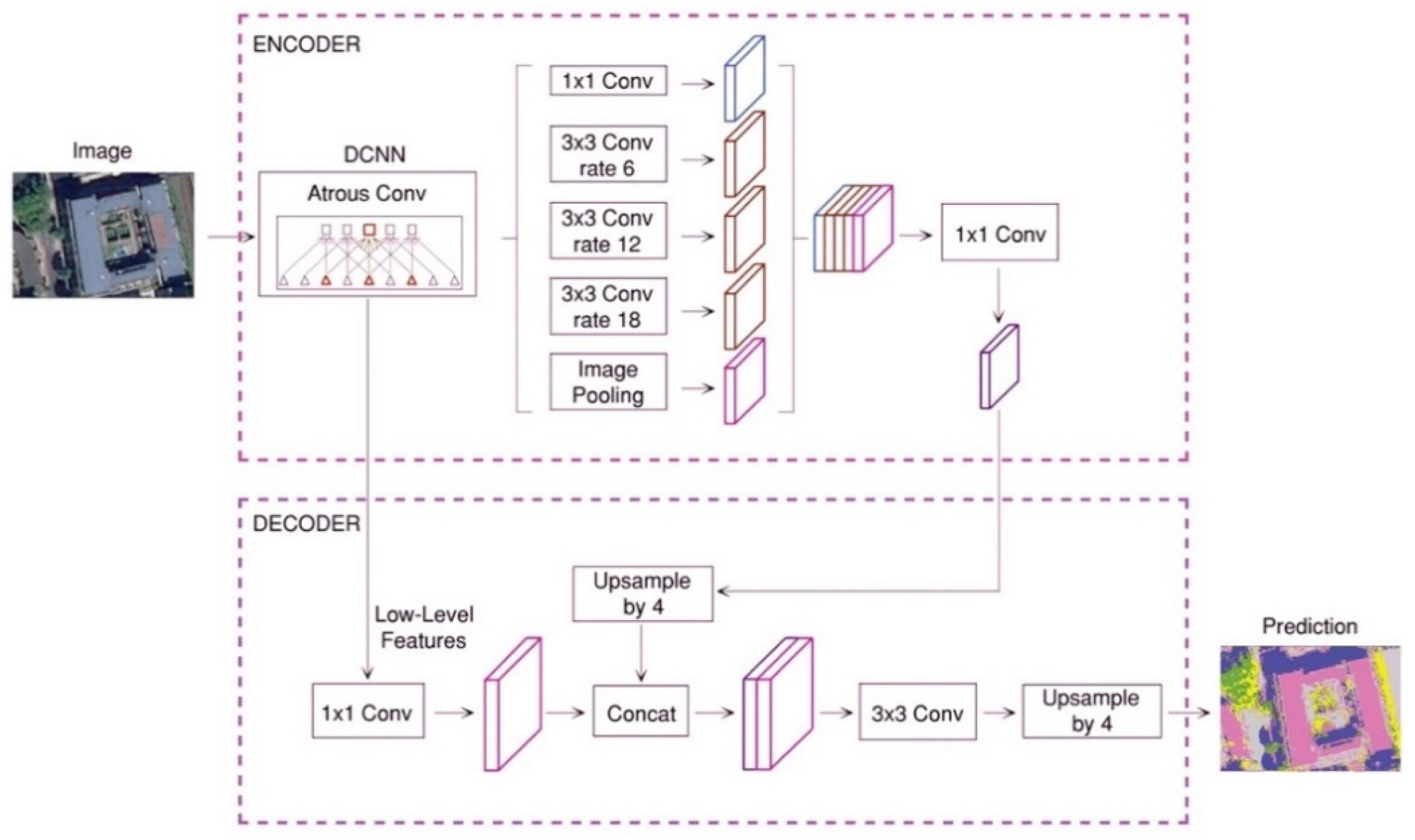
3.2.1. Categorize Urban Space Using Image Semantic Segmentation
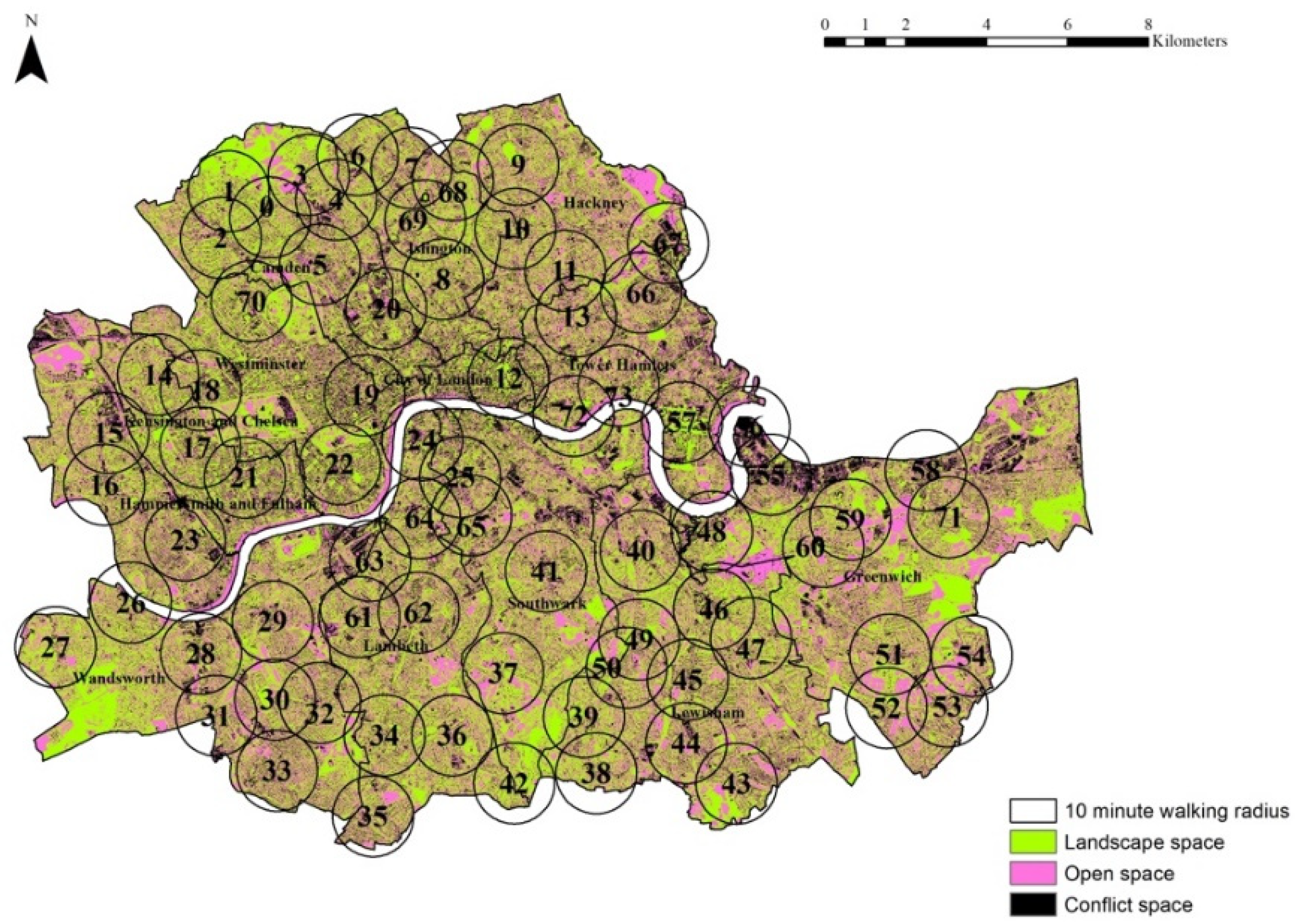
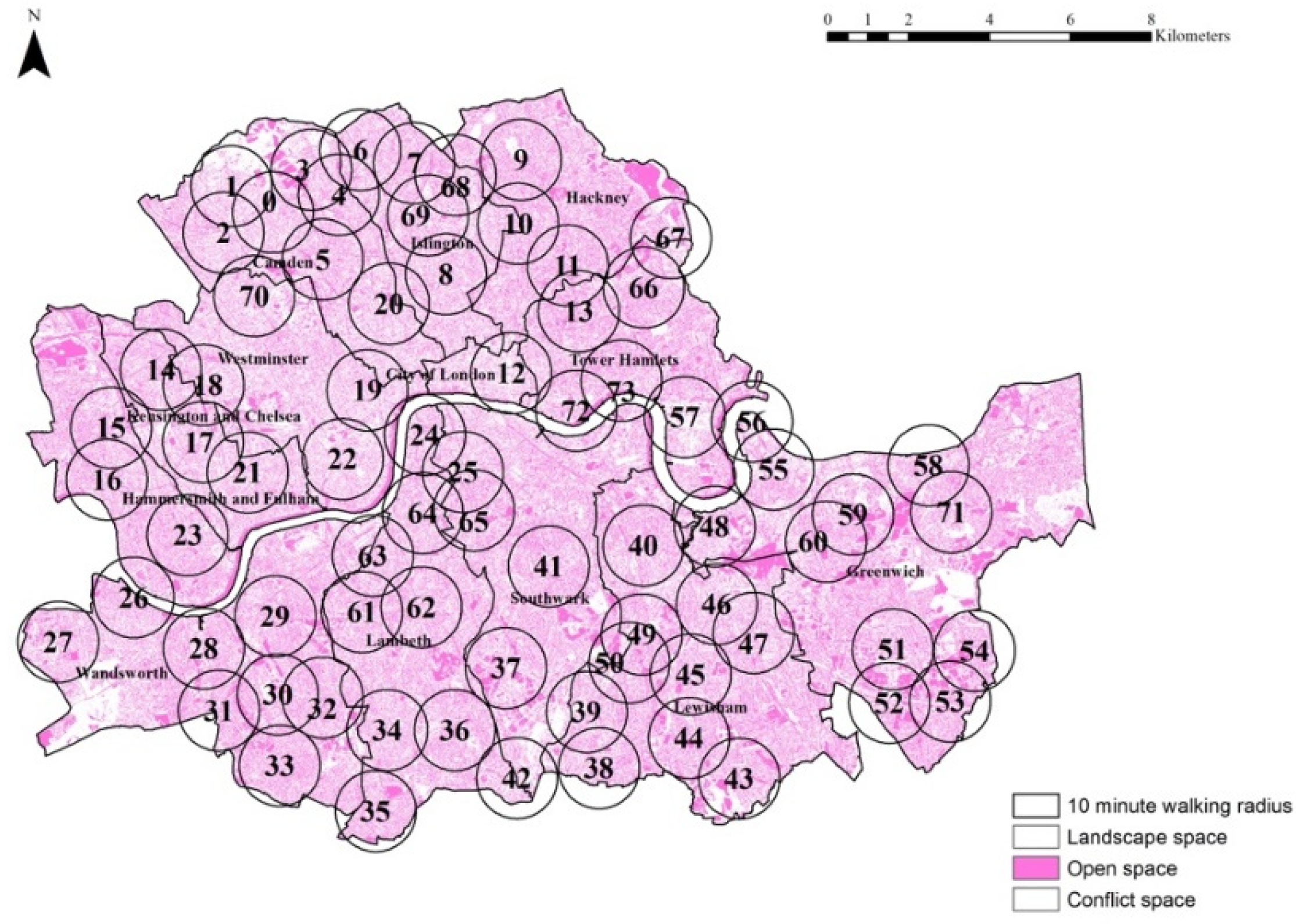
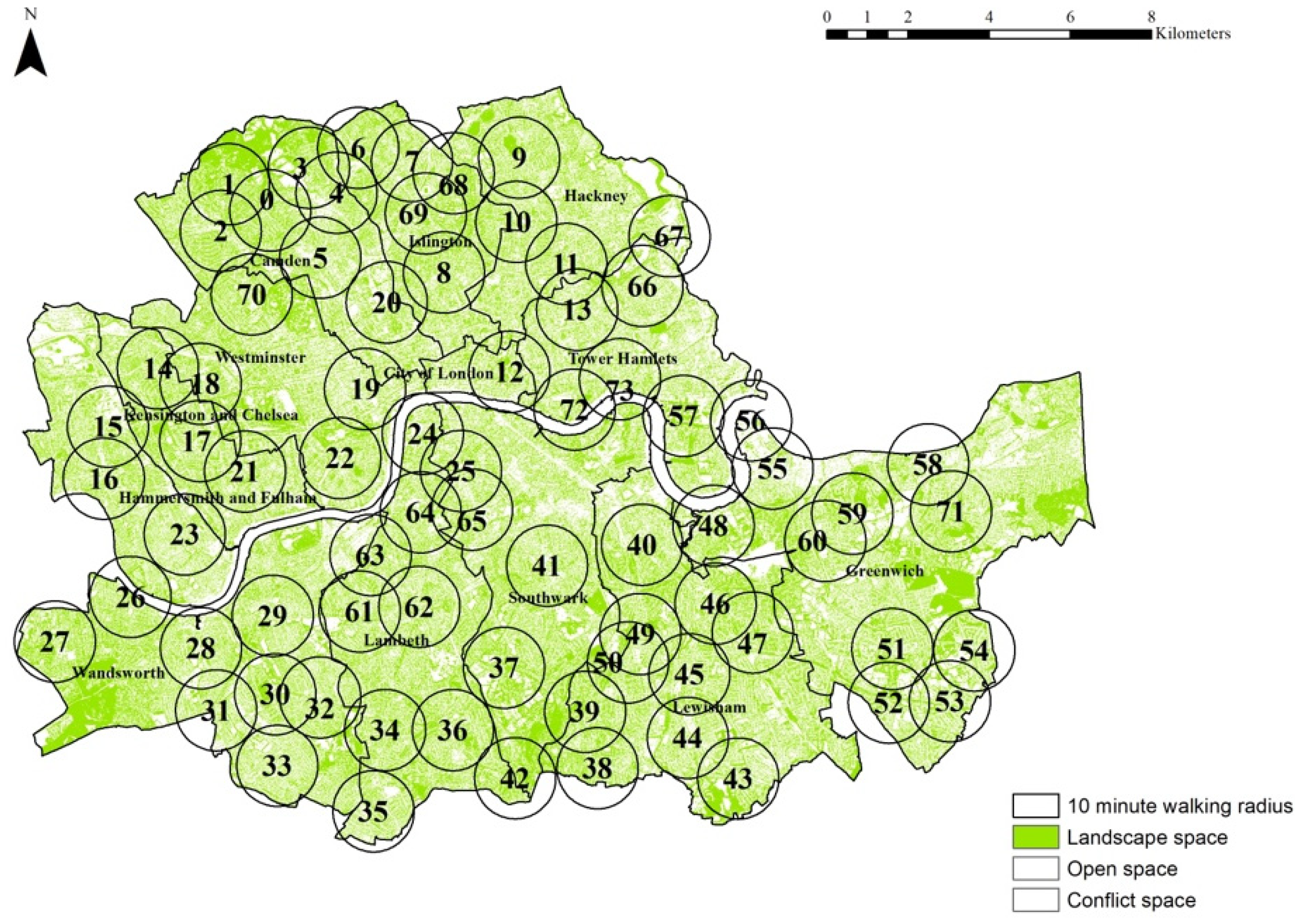
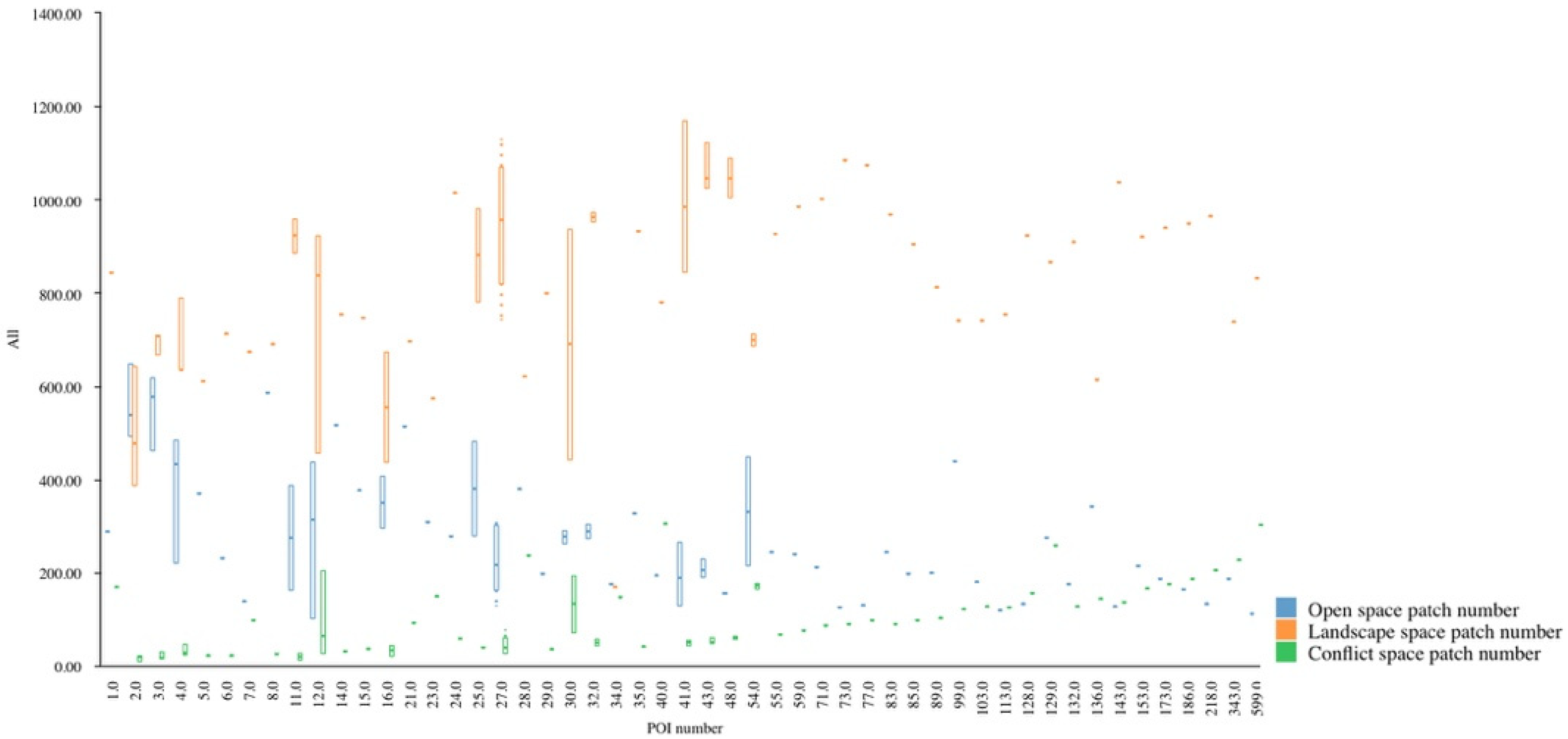
3.2.2. Quantify Urban Space by Data Resampling
3.3. Association Relationship between Catering Business to Urban Spaces
3.3.1. Outlier Detection
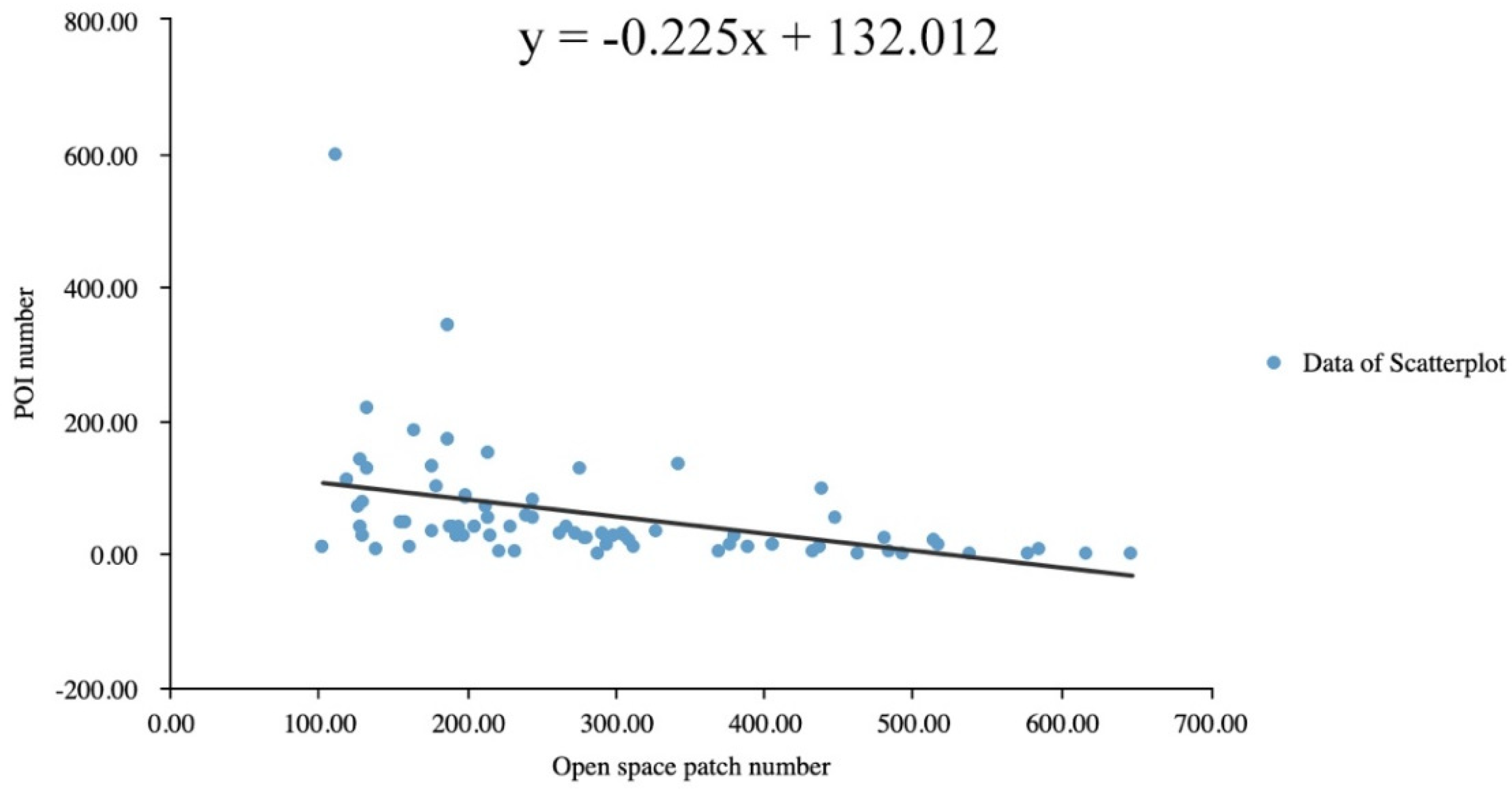
3.3.2. Correlation Analysis
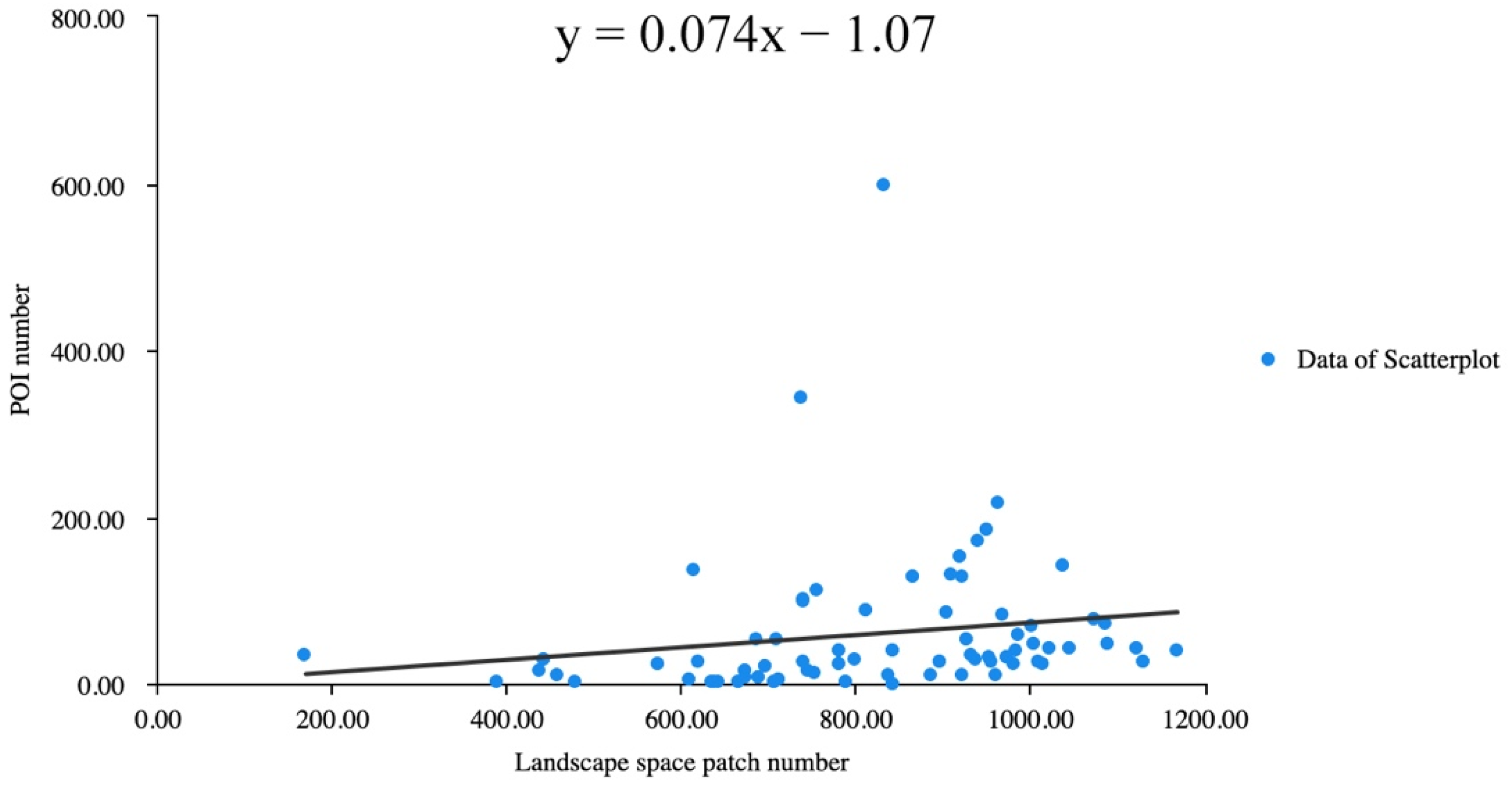
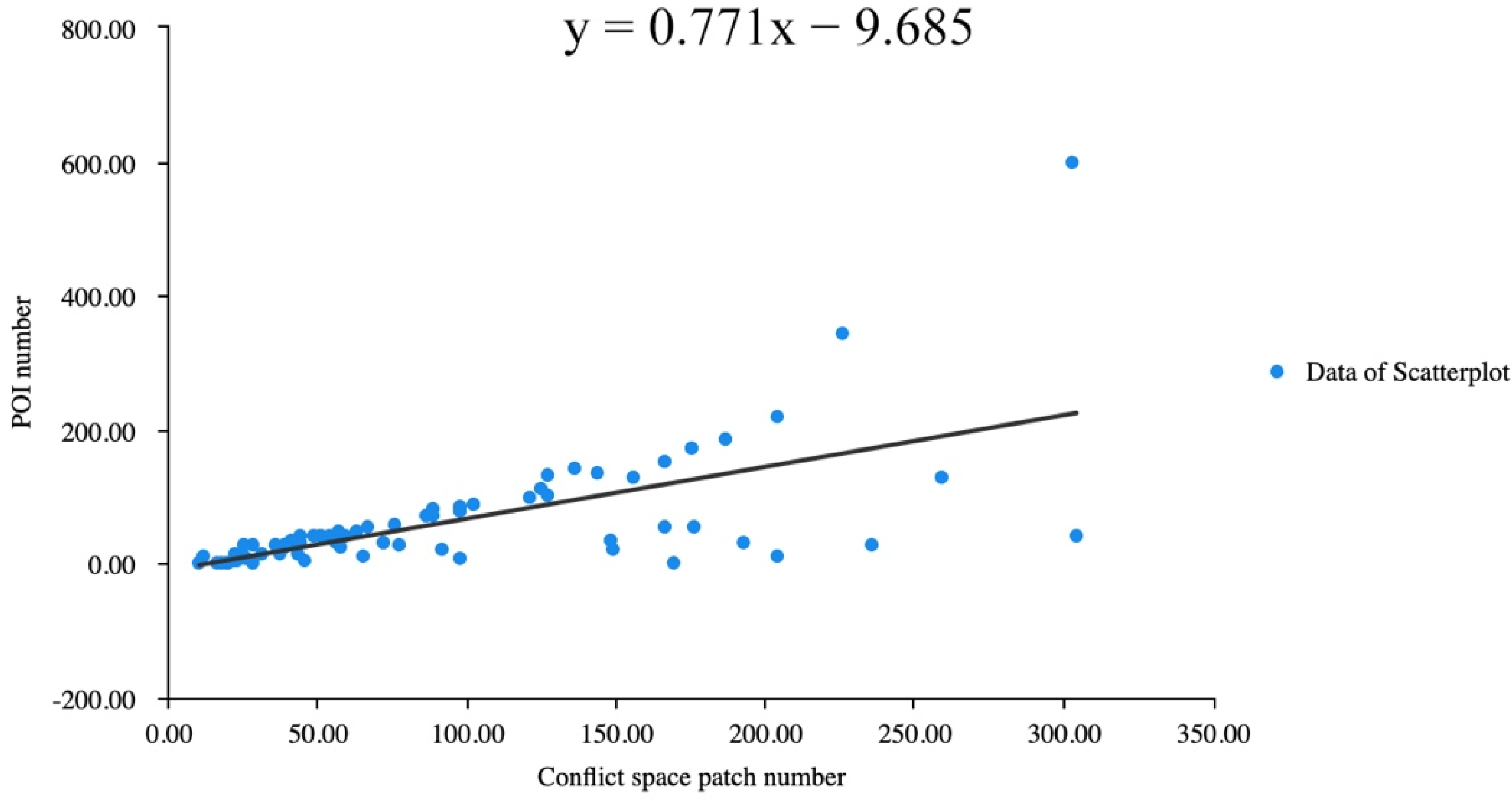
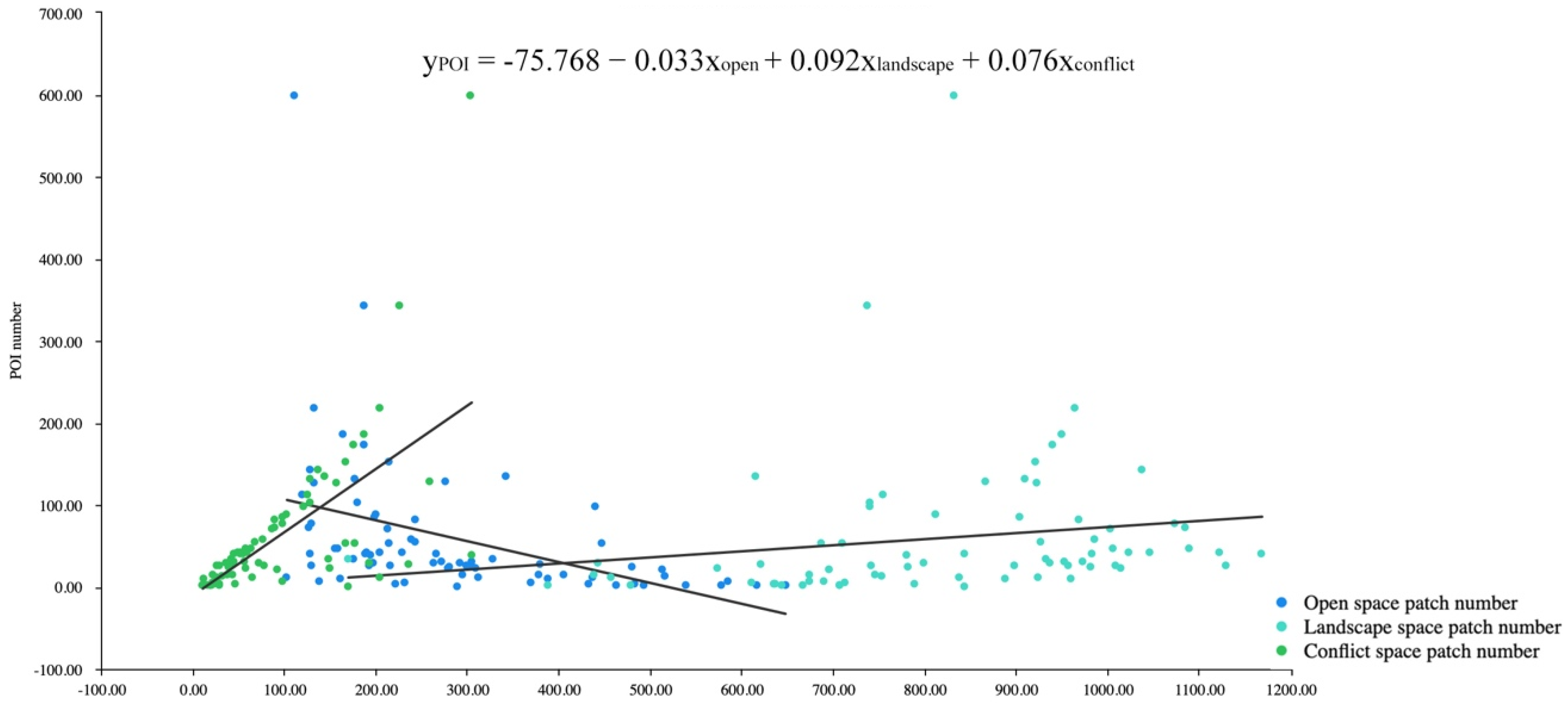
3.3.3. Regression Model
- The regression coefficient value for the open space patch number is −0.033 (t =−0.469, p = 0.640 > 0.05), meaning that the open space patch number does not have an effect on the POI number.
- The regression coefficient value for the landscape space patch number was 0.092 (t = 2.035, p = 0.046 < 0.05), implying that the landscape space patch number has a significant positive effect on the POI number.
- The regression coefficient value for the conflict space patch number was 0.769 (t = 6.282, p = 0.000 < 0.01), implying that the conflict space patch number would have a significant positive influence on the POI number.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pielke, R.A.; Adegoke, J.O.; Chase, T.N.; Marshall, C.H.; Matsui, T.; Niyogi, D. A New Paradigm for Assessing the Role of Agriculture in the Climate System and in Climate Change. Agric. For. Meteorol. 2007, 142, 234–254. [Google Scholar] [CrossRef]
- Parham, S. Exploring Food and Urbanism. J. Urban. Int. Res. Placemaking Urban Sustain. 2020, 13, 1–12. [Google Scholar] [CrossRef]
- Moragues-Faus, A.; Morgan, K. Reframing the Foodscape: The Emergent World of Urban Food Policy. Environ. Plan. Econ. Space 2015, 47, 1558–1573. [Google Scholar] [CrossRef]
- Hanser, A. Good Food in the City: How Cultural Ideas About Food Shape Street Vending Regulation. Int. J. Urban Reg. Res. 2021, 45, 519–534. [Google Scholar] [CrossRef]
- Hashemnezhad, H.; Heidari, A.A.; Mohammad Hoseini, P. Sense of Place” and “place Attachment. Int. J. Archit. Urban Dev. 2013, 3, 5–12. [Google Scholar]
- Frank, L.D.; Appleyard, B.S.; Ulmer, J.M.; Chapman, J.E.; Fox, E.H. Comparing Walkability Methods: Creation of Street Smart Walk Score and Efficacy of a Code-Based 3D Walkability Index. J. Transp. Health 2021, 21, 101005. [Google Scholar] [CrossRef]
- Ewing, R.; Handy, S. Measuring the Unmeasurable: Urban Design Qualities Related to Walkability. J. Urban Des. 2009, 14, 65–84. [Google Scholar] [CrossRef]
- Greater London Authority. The London Food Strategy: Healthy and Sustainable Food for London; Greater London Authority: London, UK, 2018; p. 64. [Google Scholar]
- Goudie, S.; McIntyre, Z. A Crisis within a Crisis: The Impact of COVID-19 on Household Food Security; The Food Foundation: London, UK, 2021. [Google Scholar]
- Liu, K.; Yin, L.; Lu, F.; Mou, N. Visualizing and Exploring POI Configurations of Urban Regions on POI-Type Semantic Space. Cities 2020, 99, 102610. [Google Scholar] [CrossRef]
- Gao, S.; Janowicz, K.; Couclelis, H. Extracting Urban Functional Regions from Points of Interest and Human Activities on Location-Based Social Networks: GAO et al. Trans. GIS 2017, 21, 446–467. [Google Scholar] [CrossRef]
- Frank, L.D.; Fox, E.H.; Ulmer, J.M.; Chapman, J.E.; Kershaw, S.E.; Sallis, J.F.; Conway, T.L.; Cerin, E.; Cain, K.L.; Adams, M.A.; et al. International Comparison of Observation-Specific Spatial Buffers: Maximizing the Ability to Estimate Physical Activity. Int. J. Health Geogr. 2017, 16, 4. [Google Scholar] [CrossRef] [Green Version]
- Logan, T.M.; Hobbs, M.H.; Conrow, L.C.; Reid, N.L.; Young, R.A.; Anderson, M.J. The X-Minute City: Measuring the 10, 15, 20-Minute City and an Evaluation of Its Use for Sustainable Urban Design. Cities 2022, 131, 103924. [Google Scholar] [CrossRef]
- Swanwick, C.; Dunnett, N.; Woolley, H. Nature, Role and Value of Green Space in Towns and Cities: An Overview. Built Environ. 2003, 29, 94–106. [Google Scholar] [CrossRef]
- Ahern, J. Planning for an Extensive Open Space System: Linking Landscape Structure and Function. Landsc. Urban Plan. 1991, 21, 131–145. [Google Scholar] [CrossRef]
- Maruani, T.; Amit-Cohen, I. Open Space Planning Models: A Review of Approaches and Methods. Landsc. Urban Plan. 2007, 81, 1–13. [Google Scholar] [CrossRef]
- Wolch, J.R.; Byrne, J.; Newell, J.P. Urban Green Space, Public Health, and Environmental Justice: The Challenge of Making Cities ‘Just Green Enough’. Landsc. Urban Plan. 2014, 125, 234–244. [Google Scholar] [CrossRef] [Green Version]
- Gunawardena, K.R.; Wells, M.J.; Kershaw, T. Utilising Green and Bluespace to Mitigate Urban Heat Island Intensity. Sci. Total Environ. 2017, 584–585, 1040–1055. [Google Scholar] [CrossRef]
- Shen, X.; Chen, M.; Ge, M.; Padua, M.G. Examining the Conceptual Model of Potential Urban Development Patch (PUDP), VOCs, and Food Culture in Urban Ecology: A Case in Chengdu, China. Atmosphere 2022, 13, 1369. [Google Scholar] [CrossRef]
- Wang, J. Unsupervised Machine Learning in Urban Studies: A Systematic Review of Applications. Cites 2022, 129, 103925. [Google Scholar] [CrossRef]
- Urech, P.R.W.; Dissegna, M.A.; Girot, C.; Grêt-Regamey, A. Point Cloud Modeling as a Bridge between Landscape Design and Planning. Landsc. Urban Plan. 2020, 203, 103903. [Google Scholar] [CrossRef]
- Park, K.; Ewing, R. The Usability of Unmanned Aerial Vehicles (UAVs) for Measuring Park-Based Physical Activity. Landsc. Urban Plan. 2017, 167, 157–164. [Google Scholar] [CrossRef]
- Ibrahim, M.R.; Haworth, J.; Cheng, T. Understanding Cities with Machine Eyes: A Review of Deep Computer Vision in Urban Analytics. Cities 2020, 96, 102481. [Google Scholar] [CrossRef]
- Cao, R.; Zhu, J.; Tu, W.; Li, Q.; Cao, J.; Liu, B.; Zhang, Q.; Qiu, G. Integrating Aerial and Street View Images for Urban Land Use Classification. Remote Sens. 2018, 10, 1553. [Google Scholar] [CrossRef] [Green Version]
- Park, K.; Christensen, K.; Lee, D. Unmanned Aerial Vehicles (UAVs) in Behavior Mapping: A Case Study of Neighborhood Parks. Urban For. Urban Green. 2020, 52, 126693. [Google Scholar] [CrossRef]
- Han, S.; Ren, F.; Wu, C.; Chen, Y.; Du, Q.; Ye, X. Using the TensorFlow Deep Neural Network to Classify Mainland China Visitor Behaviours in Hong Kong from Check-in Data. ISPRS Int. J. Geo-Inf. 2018, 7, 158. [Google Scholar] [CrossRef] [Green Version]
- Biljecki, F.; Ito, K. Street View Imagery in Urban Analytics and GIS: A Review. Landsc. Urban Plan. 2021, 215, 104217. [Google Scholar] [CrossRef]
- Jacobs, J. The Death and Life of Great American Cities; Jonathan Cape: London, UK, 1962. [Google Scholar]
- Canter, D. The Psychology of Place; Architectural Press: London, UK, 1977; ISBN 978-0-85139-532-6. [Google Scholar]
- Lynch, K. Good City Form; Reprint edition; The MIT Press: Cambridge, MA, USA, 1984; ISBN 978-0-262-62046-8. [Google Scholar]
- Montgomery, J. Making a City: Urbanity, Vitality and Urban Design. J. Urban Des. 1998, 3, 93–116. [Google Scholar] [CrossRef]
- Bianchini, F. The Crisis of Urban Public Social Life in Britain: Origins of the Problem and Possible Responses. Plan. Pract. Res. 1990, 5, 4–8. [Google Scholar] [CrossRef]
- Jacobs, A.B. Great Streets; MIT Press: Cambridge, MA, USA, 1995; ISBN 978-0-262-60023-1. [Google Scholar]
- Wang, L.; Ge, M.; Chen, N.; Ding, J.; Shen, X. An Evaluation Model of Riparian Landscape: A Case in Rural Qingxi Area, Shanghai. Land 2022, 11, 1512. [Google Scholar] [CrossRef]
- Cui, X.; Ge, M.; Shen, X. Application of Comprehensive Evaluation in New-Product-Development Evaluation: The Case of Landscape-Architectural Outdoor Wooden Furnishing. Forests 2022, 13, 1552. [Google Scholar] [CrossRef]
- Shen, X. Identifying the Role of Technology within the Discipline of 21st Century Landscape Architecture. Des. J. 2022. [Google Scholar] [CrossRef]
- Shen, X.; Handel, S.N.; Kirkwood, N.G.; Huang, Y.; Padua, M.G. Locating the Responsive Plants for Landscape Recovery: A Toolkit for Designers and Planners. Ecol. Restor. 2022, 40, 33–35. [Google Scholar] [CrossRef]
- Shen, X.; Ge, M.; Wang, Q.; Padua, M.; Chen, D. Restoring, Remaking and Greening Freshwater Ecosystems: A Review of Projects in China. Ecol. Restor. 2022, 40, 172–178. [Google Scholar] [CrossRef]
- Juhász, L.; Hochmair, H.H. Cross-Linkage between Mapillary Street Level Photos and OSM Edits. In Proceedings of the Geospatial Data in a Changing World; Sarjakoski, T., Santos, M.Y., Sarjakoski, L.T., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 141–156. [Google Scholar] [CrossRef]
- Brunsdon, C. Estimating Probability Surfaces for Geographical Point Data: An Adaptive Kernel Algorithm. Comput. Geosci. 1995, 21, 877–894. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Percent | Valid Percent | Cumulative Percent | ||
|---|---|---|---|---|---|
| Borough | Camden | 562 | 10.4% | 10.4% | 10.4% |
| City of London | 331 | 6.1% | 6.1% | 16.5% | |
| Greenwich | 99 | 1.8% | 1.8% | 18.3% | |
| Hackney | 251 | 4.6% | 4.6% | 22.9% | |
| Hammersmith and Fulham | 326 | 6.0% | 6.0% | 28.9% | |
| Islington | 435 | 8.0% | 8.0% | 36.9% | |
| Kensington and Chelsea | 511 | 9.4% | 9.4% | 46.4% | |
| Lambeth | 376 | 6.9% | 6.9% | 53.3% | |
| Lewisham | 159 | 2.9% | 2.9% | 56.2% | |
| Southwark | 297 | 5.5% | 5.5% | 61.7% | |
| Tower Hamlets | 356 | 6.6% | 6.6% | 68.3% | |
| Wandsworth | 457 | 8.4% | 8.4% | 76.7% | |
| Westminster | 1264 | 23.3% | 23.3% | 100.0% | |
| Total | 5424 | 100.0% | 100.0% | ||
| Open P-Patch | Citizens’ commuting and essential leisure functions space, including plazas, corner squares, extra roadways, extended pavement spaces, etc. |
| Landscape P-Patch | Green and blue infrastructure, including green space, public grass, roof garden, border tree space, pocket park, isolated greening space, etc. |
| Conflict P-Patch | Buildings and to-be-developed space or the excessive gray space between buildings and outdoors, including parking space, under-structure area, useless corner area, etc. |
| Center ID | POI Number | Open Space Patch Number | Landscape Space Patch Number | Conflict Space Patch Number | All |
|---|---|---|---|---|---|
| 0 | 32 | 272 | 972 | 56 | 1300 |
| 1 | 12 | 312 | 923 | 65 | 1300 |
| 2 | 41 | 69 | 1187 | 44 | 1300 |
| 3 | 24 | 228 | 1014 | 58 | 1300 |
| 4 | 27 | 215 | 1008 | 77 | 1300 |
| 5 | 71 | 212 | 1002 | 86 | 1300 |
| 6 | 30 | 112 | 1116 | 72 | 1300 |
| 7 | 85 | 98 | 1004 | 98 | 1200 |
| 8 | 128 | 132 | 922 | 156 | 1210 |
| 9 | 43 | 204 | 1045 | 51 | 1300 |
| 10 | 32 | 304 | 952 | 44 | 1300 |
| 11 | 43 | 228 | 1023 | 49 | 1300 |
| 12 | 343 | 87 | 837 | 226 | 1150 |
| 13 | 54 | 214 | 1010 | 76 | 1300 |
| 14 | 136 | 142 | 1014 | 144 | 1300 |
| 15 | 129 | 175 | 966 | 159 | 1300 |
| 16 | 89 | 149 | 811 | 102 | 1062 |
| 17 | 153 | 214 | 920 | 166 | 1300 |
| 18 | 173 | 186 | 939 | 175 | 1300 |
| 19 | 599 | 41 | 931 | 303 | 1275 |
| 20 | 186 | 164 | 949 | 187 | 1300 |
| 21 | 218 | 132 | 964 | 204 | 1300 |
| 22 | 143 | 127 | 1037 | 136 | 1300 |
| 23 | 54 | 147 | 1087 | 66 | 1300 |
| 24 | 113 | 67 | 806 | 125 | 998 |
| 25 | 73 | 126 | 1085 | 89 | 1300 |
| 26 | 41 | 128 | 843 | 54 | 1025 |
| 27 | 4 | 432 | 636 | 46 | 1114 |
| 28 | 28 | 179 | 1020 | 36 | 1235 |
| 29 | 99 | 139 | 1040 | 121 | 1300 |
| 30 | 21 | 213 | 1055 | 32 | 1300 |
| 31 | 29 | 197 | 799 | 36 | 1032 |
| 32 | 41 | 266 | 983 | 51 | 1300 |
| 33 | 132 | 76 | 1009 | 127 | 1212 |
| 34 | 11 | 388 | 887 | 25 | 1300 |
| 35 | 6 | 231 | 712 | 22 | 965 |
| 36 | 35 | 127 | 1132 | 41 | 1300 |
| 37 | 8 | 425 | 849 | 26 | 1300 |
| 38 | 16 | 294 | 438 | 43 | 775 |
| 39 | 4 | 483 | 789 | 28 | 1300 |
| 40 | 43 | 119 | 1122 | 59 | 1300 |
| 41 | 27 | 305 | 956 | 39 | 1300 |
| 42 | 4 | 221 | 635 | 23 | 879 |
| 43 | 3 | 462 | 706 | 28 | 1196 |
| 44 | 1 | 588 | 693 | 19 | 1300 |
| 45 | 15 | 317 | 946 | 37 | 1300 |
| 46 | 25 | 280 | 981 | 39 | 1300 |
| 47 | 27 | 278 | 997 | 25 | 1300 |
| 48 | 23 | 199 | 773 | 49 | 1021 |
| 49 | 16 | 405 | 873 | 22 | 1300 |
| 50 | 12 | 437 | 838 | 25 | 1300 |
| 51 | 14 | 416 | 853 | 31 | 1300 |
| 52 | 2 | 538 | 388 | 20 | 946 |
| 53 | 5 | 369 | 610 | 22 | 1001 |
| 54 | 2 | 492 | 478 | 19 | 989 |
| 55 | 12 | 102 | 457 | 204 | 763 |
| 56 | 34 | 75 | 269 | 148 | 492 |
| 57 | 103 | 179 | 739 | 127 | 1045 |
| 58 | 7 | 138 | 673 | 98 | 909 |
| 59 | 3 | 616 | 666 | 18 | 1300 |
| 60 | 3 | 477 | 807 | 16 | 1300 |
| 61 | 83 | 243 | 968 | 89 | 1300 |
| 62 | 59 | 239 | 985 | 76 | 1300 |
| 63 | 40 | 174 | 1000 | 104 | 1278 |
| 64 | 55 | 243 | 926 | 67 | 1236 |
| 65 | 48 | 155 | 1088 | 57 | 1300 |
| 66 | 25 | 480 | 781 | 39 | 1300 |
| 67 | 30 | 262 | 442 | 193 | 897 |
| 68 | 48 | 158 | 1005 | 63 | 1226 |
| 69 | 77 | 129 | 1073 | 98 | 1300 |
| 70 | 27 | 129 | 1129 | 42 | 1300 |
| 71 | 2 | 647 | 643 | 10 | 1300 |
| 72 | 27 | 193 | 741 | 28 | 962 |
| 73 | 11 | 161 | 959 | 12 | 1132 |
| Correlations | |||||
|---|---|---|---|---|---|
| POI | Open | Landscape | Conflict | ||
| POI | Pearson Correlation | 1 | −0.403 ** | 0.166 | 0.641 ** |
| Sig. (2-tailed) | <0.001 | 0.158 | <0.001 | ||
| N | 74 | 74 | 74 | 74 | |
| Open | Pearson Correlation | −0.403 ** | 1 | −0.412 ** | −0.416 ** |
| Sig. (2-tailed) | <0.001 | <0.001 | <0.001 | ||
| N | 74 | 74 | 74 | 74 | |
| Landscape | Pearson Correlation | 0.166 | −0.412 ** | 1 | −0.097 |
| Sig. (2-tailed) | 0.158 | <0.001 | 0.411 | ||
| N | 74 | 74 | 74 | 74 | |
| Conflict | Pearson Correlation | 0.641 ** | −0.416 ** | −0.097 | 1 |
| Sig. (2-tailed) | <0.001 | <0.001 | 0.411 | ||
| N | 74 | 74 | 74 | 74 | |
| Coefficients | |||||||
|---|---|---|---|---|---|---|---|
| Model | Unstandardized Coefficients | Standardized Coefficients | t | Sig. | Collinearity Statistics | ||
| B | Std. Error | Beta | Tolerance | VIF | |||
| (Constant) | −75.768 | 56.417 | −1.343 | 0.184 | |||
| Open | −0.033 | 0.07 | −0.052 | −0.469 | 0.64 | 0.62 | 1.613 |
| Landscape | 0.092 | 0.045 | 0.206 | 2.035 | 0.046 | 0.743 | 1.346 |
| Conflict | 0.769 | 0.122 | 0.639 | 6.282 | <0.001 | 0.74 | 1.352 |
| Dependent Variable: POI | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, X.; Jiang, Q.; Chen, M.; Liu, L. Quantify the Spatial Association between the Distribution of Catering Business and Urban Spaces in London Using Catering POI Data and Image Segmentation. Atmosphere 2022, 13, 2128. https://doi.org/10.3390/atmos13122128
Zhang Y, Li X, Jiang Q, Chen M, Liu L. Quantify the Spatial Association between the Distribution of Catering Business and Urban Spaces in London Using Catering POI Data and Image Segmentation. Atmosphere. 2022; 13(12):2128. https://doi.org/10.3390/atmos13122128
Chicago/Turabian StyleZhang, Yang, Xiaowei Li, Qingrui Jiang, Mingze Chen, and Lunyuan Liu. 2022. "Quantify the Spatial Association between the Distribution of Catering Business and Urban Spaces in London Using Catering POI Data and Image Segmentation" Atmosphere 13, no. 12: 2128. https://doi.org/10.3390/atmos13122128
APA StyleZhang, Y., Li, X., Jiang, Q., Chen, M., & Liu, L. (2022). Quantify the Spatial Association between the Distribution of Catering Business and Urban Spaces in London Using Catering POI Data and Image Segmentation. Atmosphere, 13(12), 2128. https://doi.org/10.3390/atmos13122128