
Investigation of Heavy-Duty Vehicle Chassis Dynamometer Fuel Consumption and CO2 Emissions Based on a Binning-Reconstruction Model Using Real-Road Data


Abstract
:1. Introduction
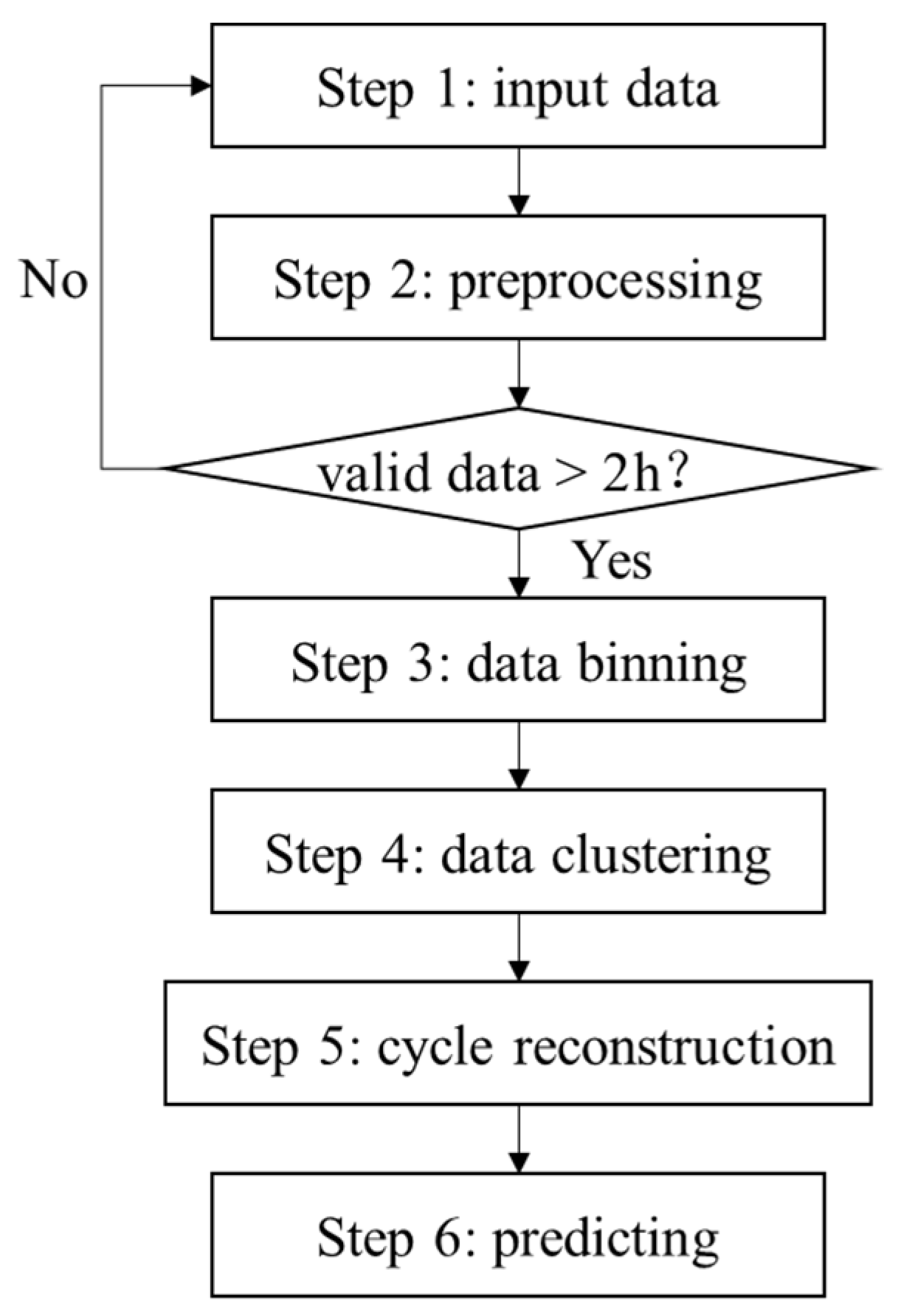
2. Calculation Model
3. Experimental Setup
4. Results and Discussion
4.1. Feasibility of the Binning-Reconstruction Model
4.2. Predicting the Unknown Point
- (a)
- 1D fitting. The so-called “1D fitting” is based on linear interpolation or extrapolation. Assume that the unknown point is labelled with . If the number of known bins labelled with the same is larger than two, the unknown point is calculated as the interpolated or extrapolated value at of the 1D function, fitted by all known bins labelled with . Otherwise, the unknown data is calculated as the interpolated or extrapolated value at of the 1D function, fitted by all known bins labelled with .
- (b)
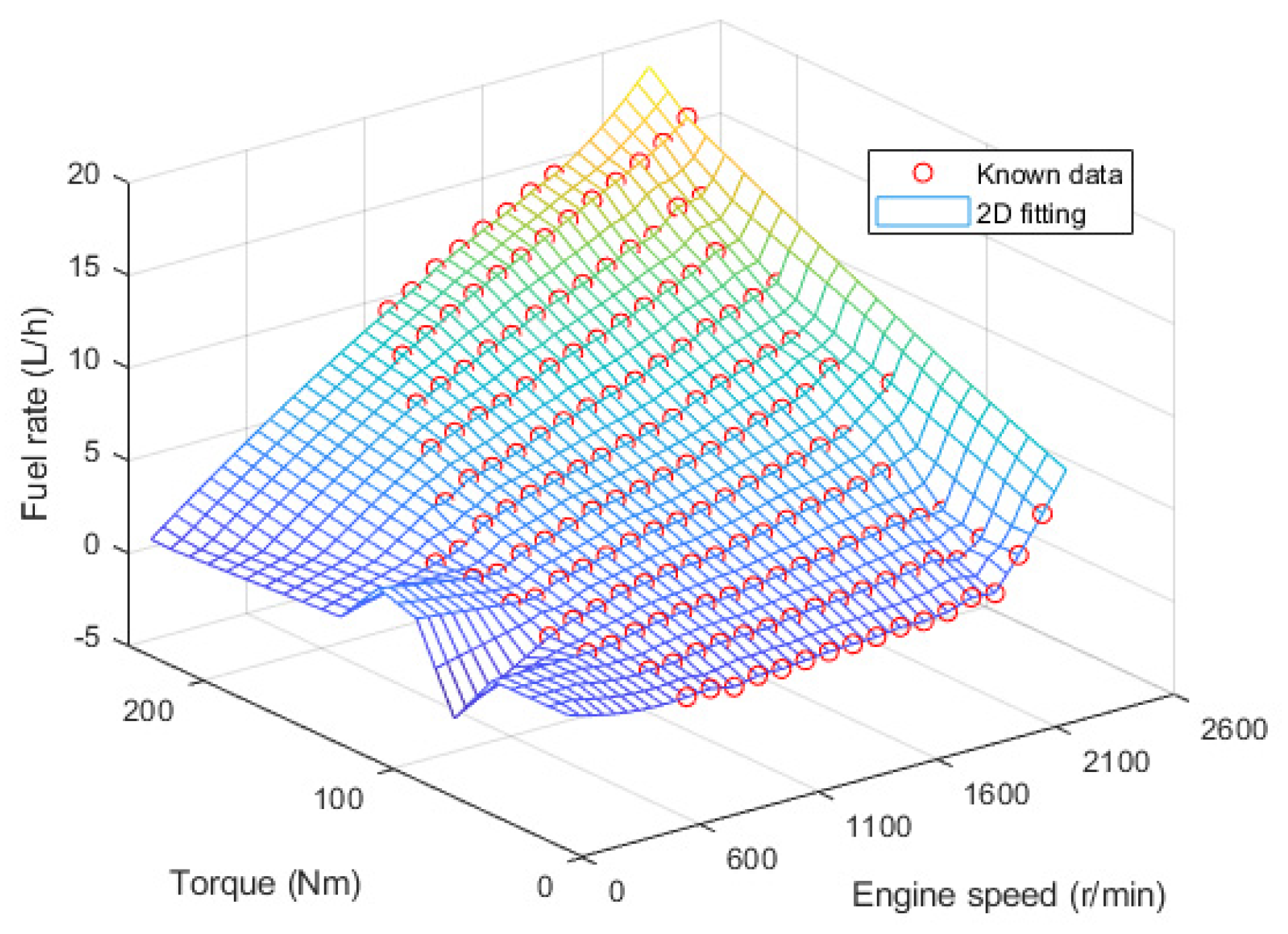
- 2D fitting. The so-called “2D fitting” is based on 2D interpolation or extrapolation. A surface function can be fitted using all the known bins, as shown in Figure 6. Then, unknown points can be calculated as the interpolated or extrapolated value at of this surface function.
4.3. Effects of the Binning Interval
4.4. Predicting the Bag Sampling Results
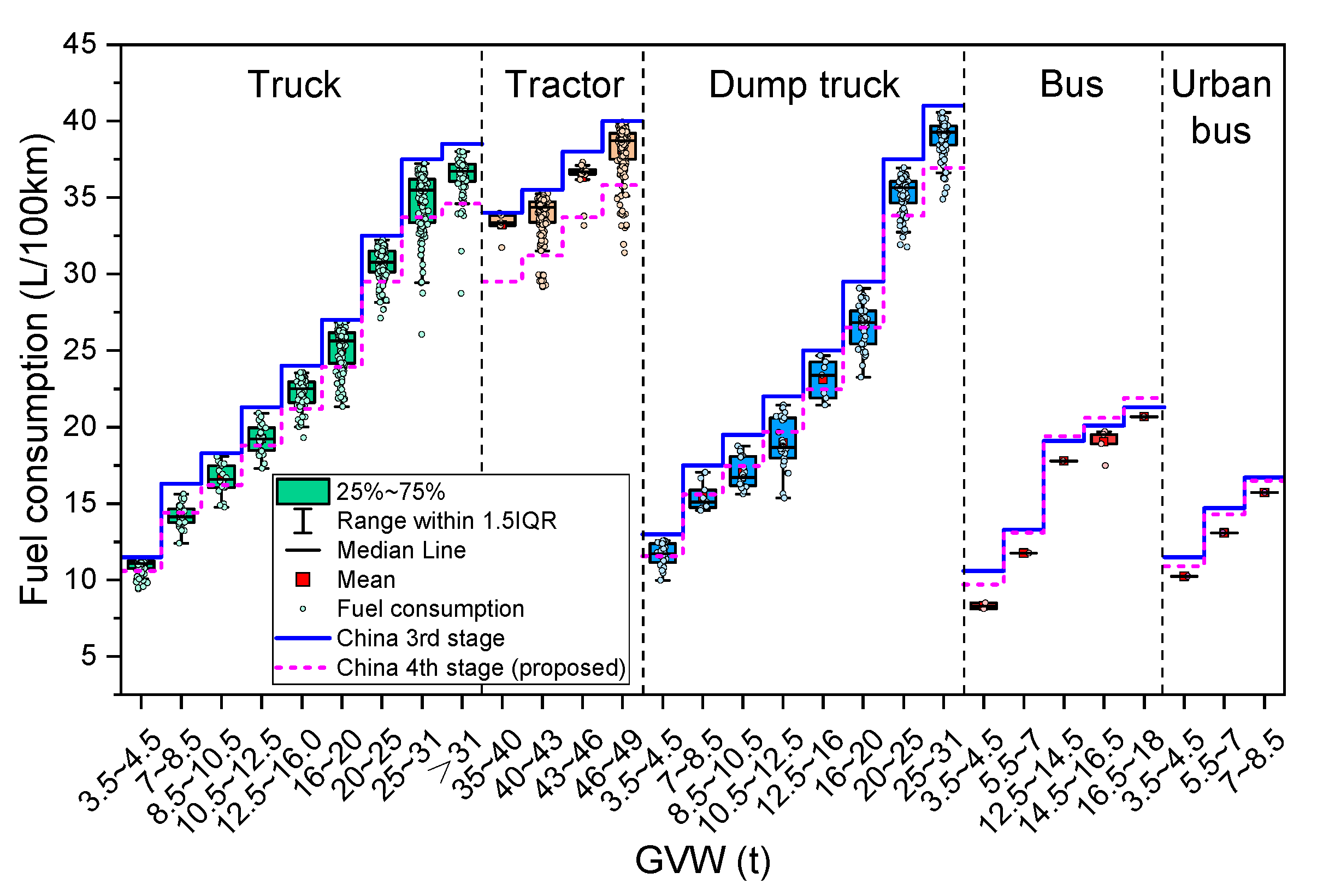
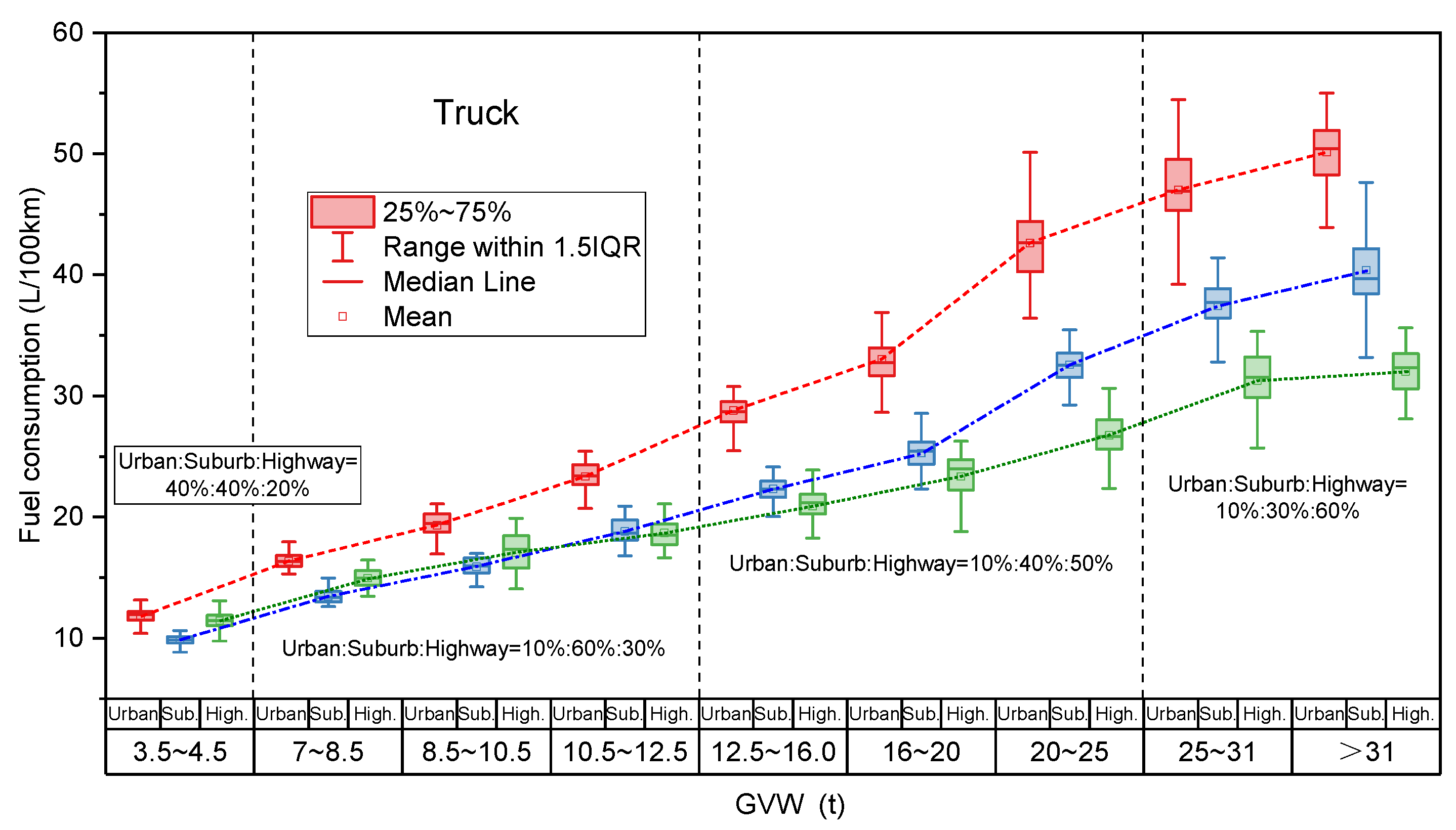
4.5. Heavy-Duty Vehicle Fuel Consumption
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shijin, S.; Zhi, W.; Xiao, M.; Hongming, X.; Xin, H.; Jianxin, W. Low carbon and zero carbon technology paths and key technologies of ICEs under the background of carbon neutrality. J. Automot. Saf. Energy 2021, 12, 417–439. [Google Scholar] [CrossRef]
- He, J. Research on China’s long-term low-carbon development strategy and transformation path. China Popul. Resour. Environ. 2020, 30, 1–25. [Google Scholar] [CrossRef]
- Ministry of Ecology and Environment of the P.R.C. China Mobile Source Environmental Management Annual Report; Ministry of Ecology and Environment of the P.R.C.: Beijing, China, 2022. Available online: https://www.mee.gov.cn/ywdt/xwfb/202212/t20221207_1007157.shtml (accessed on 10 February 2023).
- Fit for 55. Available online: https://www.consilium.europa.eu/en/policies/green-deal/fit-for-55-the-eu-plan-for-a-green-transition (accessed on 10 February 2023).
- Euro 7; Proposal for a Regulation of the European Parliament and of the Council on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical Units Intended for such Vehicles, with Respect to their Emissions and Battery Durability (Euro 7) and Repealing Regulations (EC) No 715/2007 and (EC) No 595/2009. The European Commission: Brussels, Belgium; The European Union: Brussels, Belgium, 2022.
- Vehicle Energy Consumption Calculation Tool—VECTO. Available online: https://climate.ec.europa.eu/eu-action/transport-emissions/road-transport-reducing-co2-emissions-vehicles/vehicle-energy-consumption-calculation-tool-vecto_en (accessed on 10 February 2023).
- The United States Environment Protection Agency (EPA). 2021 GHGRP Overview Report; The United States Environment Protection Agency (EPA): Washington, DC, USA, 2022. Available online: https://www.epa.gov/ghgreporting/ghgrp-yearly-overview (accessed on 10 February 2023).
- 40 CFR; Control of Air Pollution from New Motor Vehicles: Heavy-Duty Engine and Vehicle Standards. The United States Environment Protection Agency (EPA): Washington, DC, USA, 2022.
- Greenhouse Gas Emissions Model (GEM) v4.0 User Guide. Available online: https://www.epa.gov/regulations-emissions-vehicles-and-engines/greenhouse-gas-emissions-model-gem-medium-and-heavy-duty#overview (accessed on 10 February 2023).
- GB 30510-2018; Fuel Consumption Limits for Heavy-Duty Commercial Vehicles. Standards Press of China: Beijing, China, 2018.
- GB/T 27840-2021; Fuel Consumption Test Methods for Heavy-Duty Commercial Vehicles. Standards Press of China: Beijing, China, 2021.
- Yu, H.; Liu, Y.; Li, J.; Ma, K.; Liang, Y.; Xu, H. Investigations on fuel consumption characteristics of heavy-duty commercial vehicles under different test cycle. Energy Rep. 2022, 8, 102–111. [Google Scholar] [CrossRef]
- Lourenço, M.A.D.M.; Eckert, J.J.; Silva, F.L.; Miranda, M.H.R.; de Alkmin e Silva, L.C. Uncertainty analysis of vehicle fuel consumption in twin-roller chassis dynamometer experiments and simulation models. Mech. Mach. Theory 2023, 180, 105126. [Google Scholar] [CrossRef]
- Wang, L.; Duran, A.; Gonder, J.; Kelly, K. Modeling heavy/medium-duty fuel consumption based on drive cycle properties. In Proceedings of the SAE 2015 Commercial Vehicle Engineering Congress (COMVEC), Rosemont, IL, USA, 6–8 October 2015. [Google Scholar]
- GB 17691-2018; Limits and Measurement Methods for Emissions from Diesel Fuelled Heavy-Duty Vehicle (China VI). Standards Press of China: Beijing, China, 2018.
- The European Commission. Commission Staff Working Document: Impact Assessment Report Accompanying the Document Proposal for a Regulation of the European Parliament and of the Council (Euro 7) Part1/3; The European Commission: Brussels, Belgium, 2022; Available online: https://single-market-economy.ec.europa.eu/publications/euro-7-standard-proposal_en (accessed on 1 February 2023).
- The California Air Resources Board. California Code of Regulations; The California Air Resources Board: Sacramento, CA, USA, 2019; Section 1971.1, Title 13.
- Zhang, S.; Zhao, P.; He, L.; Yang, Y.; Liu, B.; He, W.; Cheng, Y.; Liu, Y.; Liu, S.; Hu, Q.; et al. On-board monitoring (OBM) for heavy-duty vehicle emissions in China: Regulations, Early-stage Evaluation and Policy recommendations. Sci. Total Environ. 2020, 731, 139045. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Liu, J.; Wan, C.; Wang, Z. Remote supervision strategy based on in-use vehicle OBD data flow. E3S Web Conf. 2021, 268, 01007. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, S.; Wu, Y.; Chen, Q.; Niu, T.; Huang, X.; Zhang, S.; Zhang, L.; Zhou, Y.; Hao, J. Evaluating real-world CO2 and NOx emissions for public transit buses using a remote wireless on-board diagnostic (OBD) approach. Env. Pollut. 2016, 218, 453–462. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Gross Vehicle Weight/t | Urban/% | Suburb/% | Highway/% |
|---|---|---|---|---|
| Tractor | 9–27 | 0 | 40 | 60 |
| >27 | 0 | 10 | 90 | |
| Dump truck | >3.5 | 0 | 100 | 0 |
| Truck (except dump truck) | 3.5–5.5 | 40 | 40 | 20 |
| 5.5–12.5 | 10 | 60 | 30 | |
| 12.5–25 | 10 | 40 | 50 | |
| >25 | 10 | 30 | 60 | |
| Urban bus | >3.5 | 100 | 0 | 0 |
| Bus (except urban bus) | 3.5–5.5 | 50 | 25 | 25 |
| 5.5–12.5 | 20 | 30 | 50 | |
| >12.5 | 10 | 20 | 70 |
| Input Data | Name | Unit | Source |
|---|---|---|---|
| Real-road data | Engine coolant temperature | °C | PEMS device or remote monitoring |
| Engine speed | r/min | PEMS device or remote monitoring | |
| Reference torque | Nm | PEMS device or remote monitoring | |
| Actual torque | % | PEMS device or remote monitoring | |
| Friction torque | % | PEMS device or remote monitoring | |
| Fuel rate | L/h | PEMS device or remote monitoring | |
| Dynamometer data | Vehicle speed | km/h | OBD data stream or chassis dynamometer |
| Engine speed | r/min | OBD data stream | |
| Reference torque | Nm | OBD data stream | |
| Actual torque | % | OBD data stream | |
| Friction torque | % | OBD data stream | |
| Fuel rate | L/h | OBD data stream | |
| CO2 rate | g/s | Emission analyzer | |
| Urban part fuel consumption | L/100 km | Emission analyzer sampling bag | |
| Suburb part fuel consumption | L/100 km | Emission analyzer sampling bag | |
| Highway part fuel consumption | L/100 km | Emission analyzer sampling bag |
| Vehicle | Displacement/L | Reference Torque/Nm | Data Source | Driving Conditioner Cycle | Load/% | Data Length/s |
|---|---|---|---|---|---|---|
| 1 | 2.289 | 315 | Real-road | Daily route | 29.1 | 53,230 (14.7 h) |
| Chassis dynamometer | C-WTVC | 100 | 1800 | |||
| 2 | 7.8 | 1539 | Real-road | PEMS 1 + Daily route | 21 | 16,165 (4.5 h) |
| Chassis dynamometer | C-WTVC | 100 | 468 | |||
| 3 | 4.088 | 817 | Real-road | PEMS | 47.6 | 7323 (2.0 h) |
| Chassis dynamometer | C-WTVC | 100 | 1800 | |||
| 4 | 4.5 | 975 | Remote Monitoring | Daily route | - | 383,720 (106.6 h) |
| Chassis dynamometer | C-WTVC | 50 | 1800 | |||
| 90 | 1800 |
| Vehicle | Load/% | Result | CO2 | Fuel Consumption | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Urban/(g/kWh) | Suburb/(g/kWh) | Highway/(g/kWh) | Weighted/(g/kWh) | Accumulated/g | Urban/(L/100km) | Suburb/(L/100km) | Highway/(L/100km) | Weighted/(L/100km) | Accumulated/L | |||
| 1 | 100 | Exp. | 685.2 | 597.5 | 657.2 | 644.5 | 6213.0 | 11.4 | 10.1 | 12.5 | 11.1 | 2.34 |
| Cal. | 698.9 | 621.6 | 688.8 | 666.0 | 6451.9 | 11.7 | 10.5 | 13.1 | 11.5 | 2.43 | ||
| Error/% | 2.0 | 4.0 | 4.8 | 3.3 | 3.8 | 2.0 | 4.0 | 4.8 | 3.4 | 3.8 | ||
| 2 | 100 | Exp. | - | 592.6 | - | 592.6 | 5838.3 | - | 39.6 | - | 39.6 | 2.20 |
| Cal. | - | 605.5 | - | 605.5 | 6004.8 | - | 40.4 | - | 40.4 | 2.37 | ||
| Error/% | - | 2.2 | - | 2.2 | 2.9 | - | 2.1 | - | 2.1 | 2.8 | ||
| 3 | 100 | Exp. | 689.8 | 657.3 | 692.8 | 678.3 | 12,702.0 | 28.6 | 22.0 | 21.5 | 22.4 | 4.79 |
| Cal. | 694.1 | 662.9 | 635.91 | 652.5 | 12,335.4 | 28.8 | 22.2 | 19.8 | 21.6 | 4.65 | ||
| Error/% | 0.6 | 0.9 | −8.2 | −3.8 | −2.8 | 0.7 | 0.8 | −8.1 | −3.4 | −2.8 | ||
| 4 | 50 | Exp. | 759.4 | 696.7 | 689.7 | 700.9 | 9435.5 | 21.2 | 16.2 | 15.8 | 16.6 | 3.56 |
| Cal. | 766.2 | 695.0 | 714.2 | 707.9 | 9594.2 | 21.3 | 16.1 | 16.4 | 16.7 | 3.62 | ||
| Error/% | 0.9 | −0.3 | 3.6 | 1.0 | 1.7 | 0.8 | −0.3 | 3.6 | 1.0 | 1.6 | ||
| 90 | Exp. | 728.3 | 704.0 | 685.9 | 701.0 | 10,377.5 | 24.2 | 18.0 | 16.8 | 18.3 | 3.92 | |
| Cal. | 739.1 | 682.3 | 699.6 | 693.2 | 10,429.0 | 24.5 | 17.5 | 17.2 | 18.1 | 3.93 | ||
| Error/% | 1.5 | −3.1 | 2 | −1.1 | 0.5 | 1.5 | −3.1 | 2 | −1.1 | 0.5 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, S.; Li, T.; Li, G.; Liu, X.; Liu, H.; Wang, X.; Gao, D.; Liu, Z. Investigation of Heavy-Duty Vehicle Chassis Dynamometer Fuel Consumption and CO2 Emissions Based on a Binning-Reconstruction Model Using Real-Road Data. Atmosphere 2023, 14, 528. https://doi.org/10.3390/atmos14030528
Ren S, Li T, Li G, Liu X, Liu H, Wang X, Gao D, Liu Z. Investigation of Heavy-Duty Vehicle Chassis Dynamometer Fuel Consumption and CO2 Emissions Based on a Binning-Reconstruction Model Using Real-Road Data. Atmosphere. 2023; 14(3):528. https://doi.org/10.3390/atmos14030528
Chicago/Turabian StyleRen, Shuojin, Tengteng Li, Gang Li, Xiaofei Liu, Haoye Liu, Xiaowei Wang, Dongzhi Gao, and Zhiwei Liu. 2023. "Investigation of Heavy-Duty Vehicle Chassis Dynamometer Fuel Consumption and CO2 Emissions Based on a Binning-Reconstruction Model Using Real-Road Data" Atmosphere 14, no. 3: 528. https://doi.org/10.3390/atmos14030528
APA StyleRen, S., Li, T., Li, G., Liu, X., Liu, H., Wang, X., Gao, D., & Liu, Z. (2023). Investigation of Heavy-Duty Vehicle Chassis Dynamometer Fuel Consumption and CO2 Emissions Based on a Binning-Reconstruction Model Using Real-Road Data. Atmosphere, 14(3), 528. https://doi.org/10.3390/atmos14030528