
A Multipurpose Simulation Approach for Hybrid Electric Vehicles to Support the European CO2 Emissions Framework




Abstract
:1. Introduction
2. Materials and Methods
2.1. Simulation Framework
2.2. Vehicle Energy and Fuel Consumption Calculation Principles
2.3. Hybrid Powertrain Operating Conditions and Architectures
- Electric Propulsion (EP)
- Regenerative Braking (RB)
- Charging (CH)
- Electric Assist (EA)
- parallel
- series
- power-split.
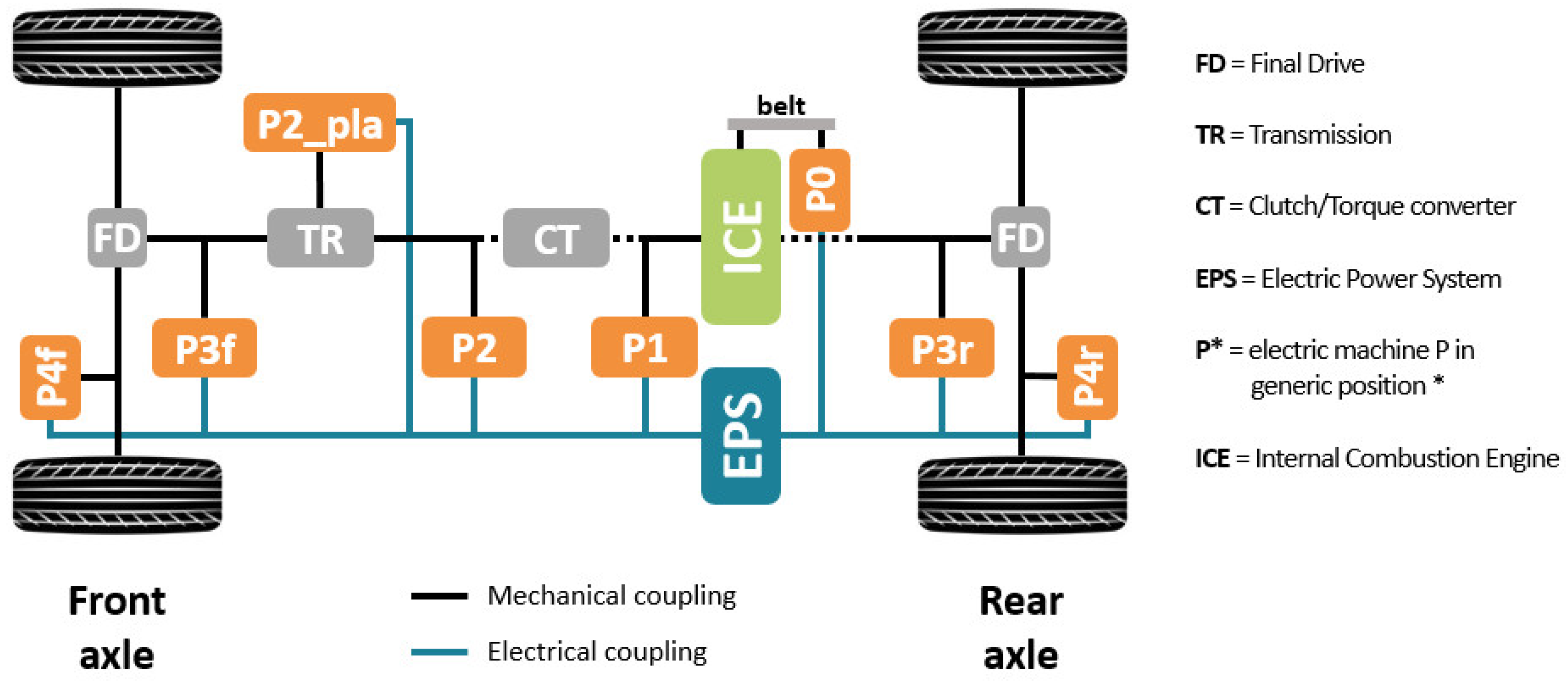
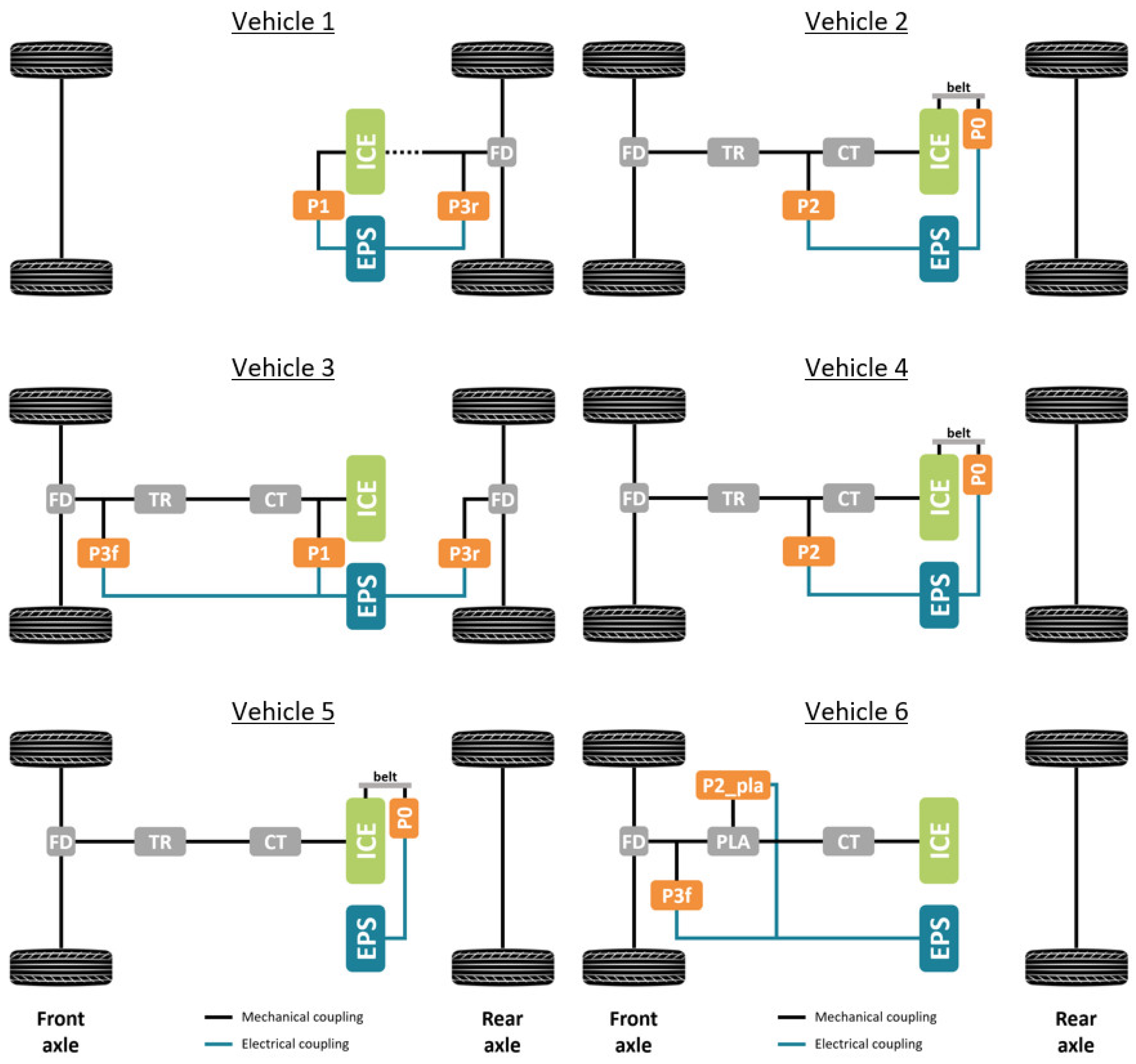
2.4. Powertrain Model
- → the EM is connected to the ICE belt
- → the EM is connected to the ICE crankshaft
- → the EM is upstream of the transmission
- → the EM is connected to the planetary side (explained below)
- → the EM is upstream of the final drive (front or rear)
- → the EM is mounted on the wheels (front or rear, one on each wheel of the axle)
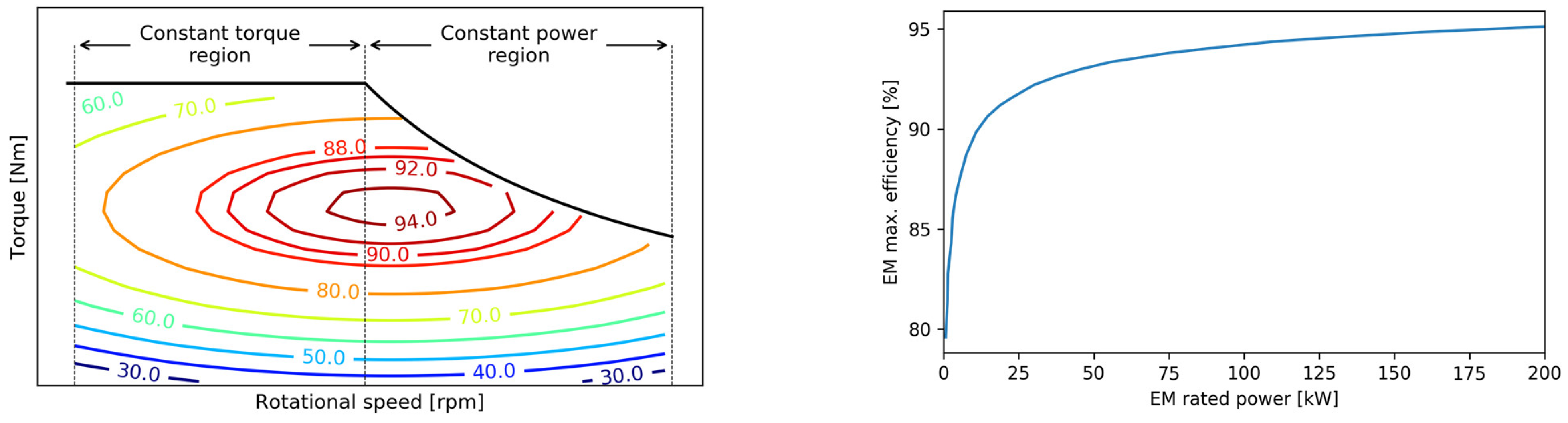
2.4.1. Electric Machines
2.4.2. Mechanical Power Balance Equations
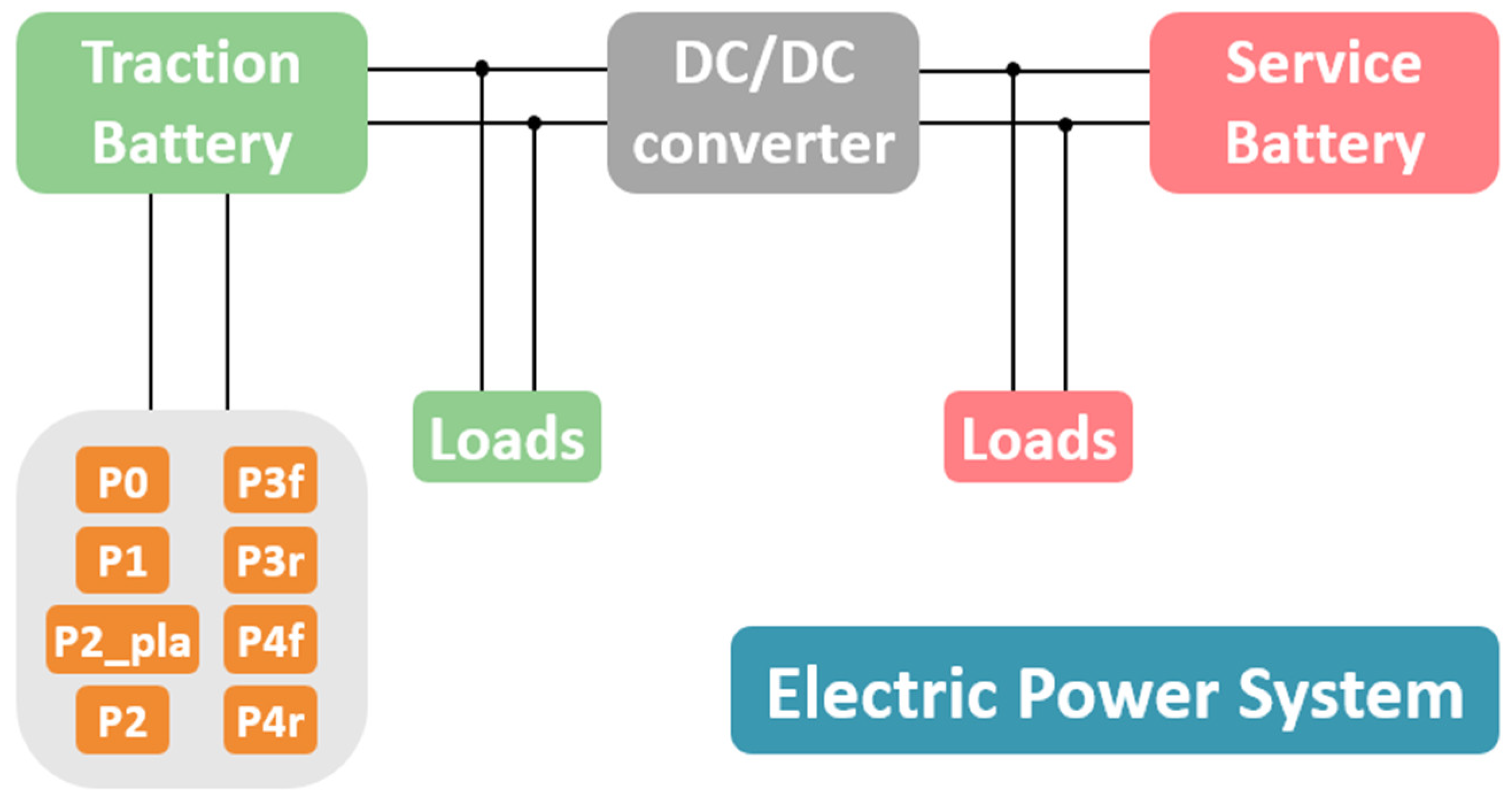
2.5. Electric Power System
2.5.1. Electrical Power Balance Equation
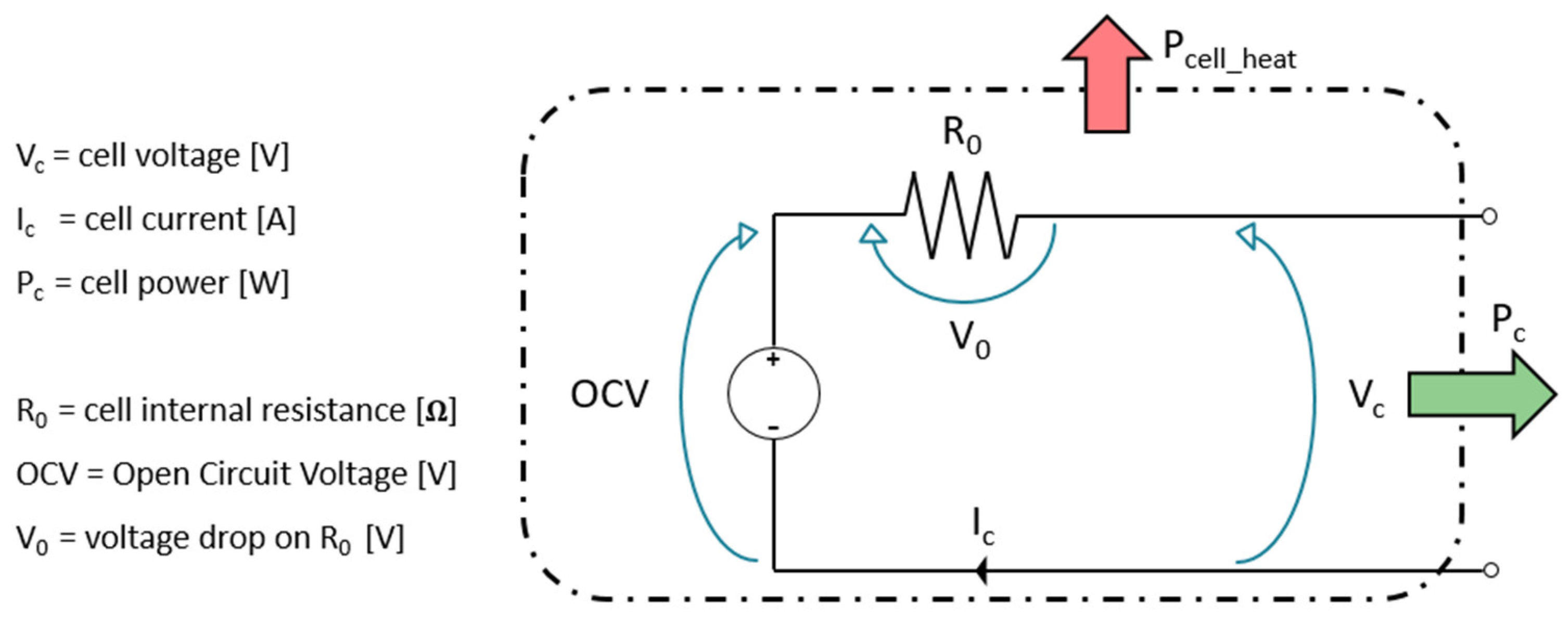
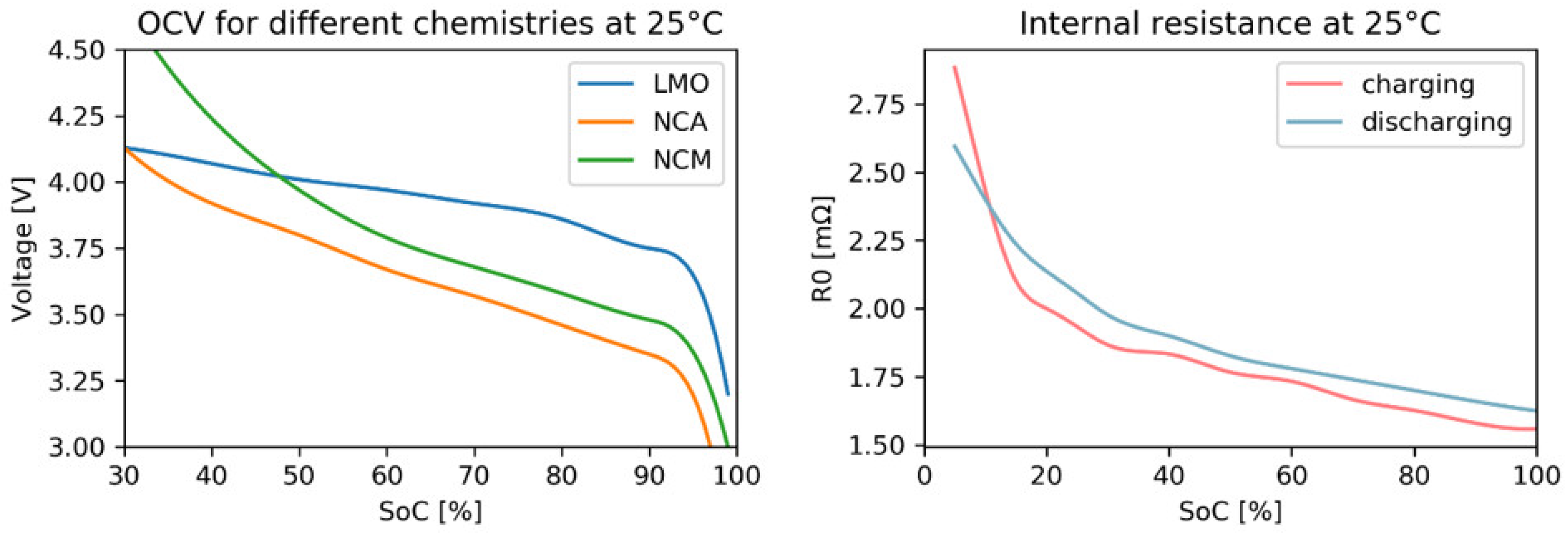
2.5.2. Traction Battery
2.6. Generic Control Strategy
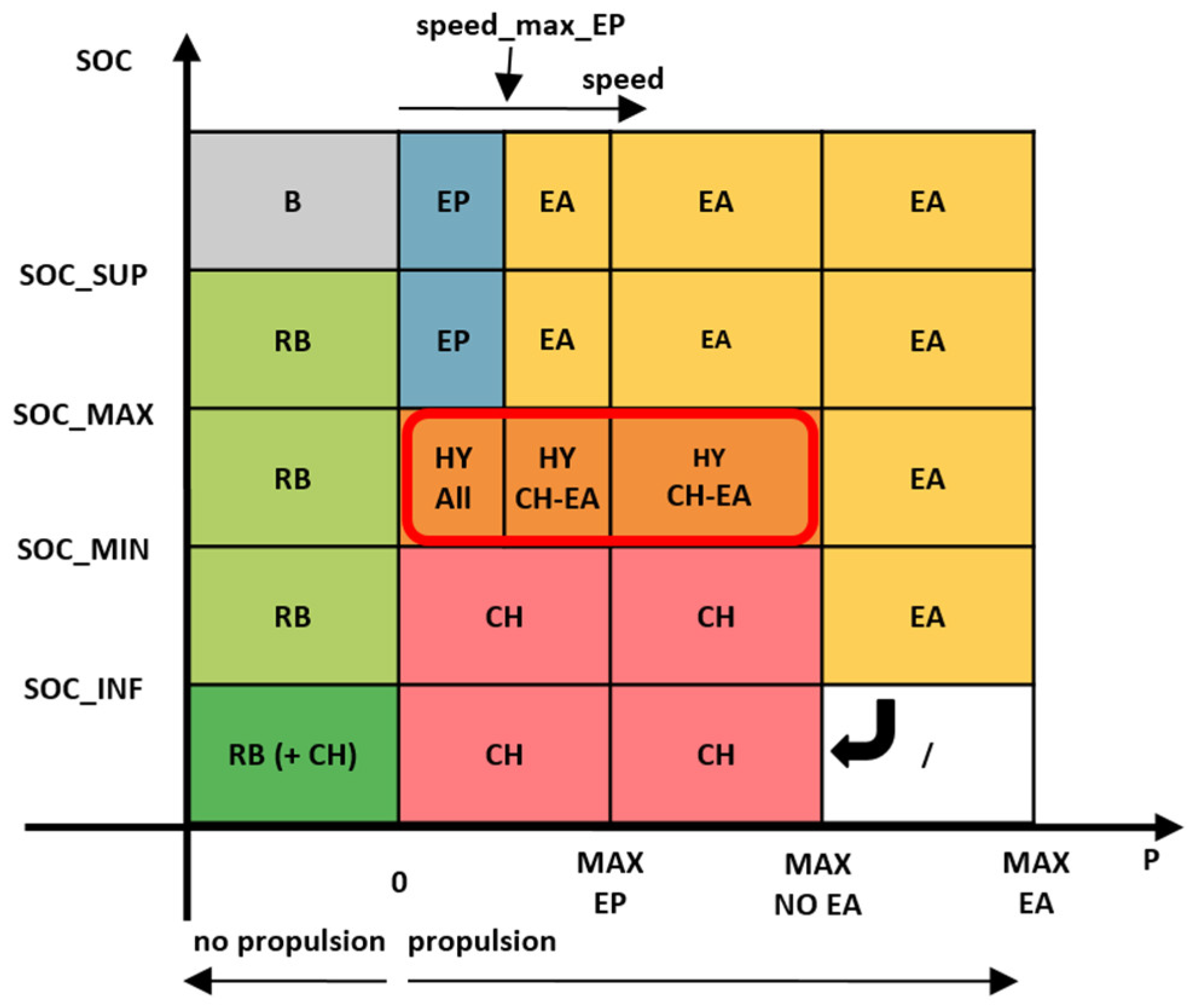
2.6.1. Supervisor
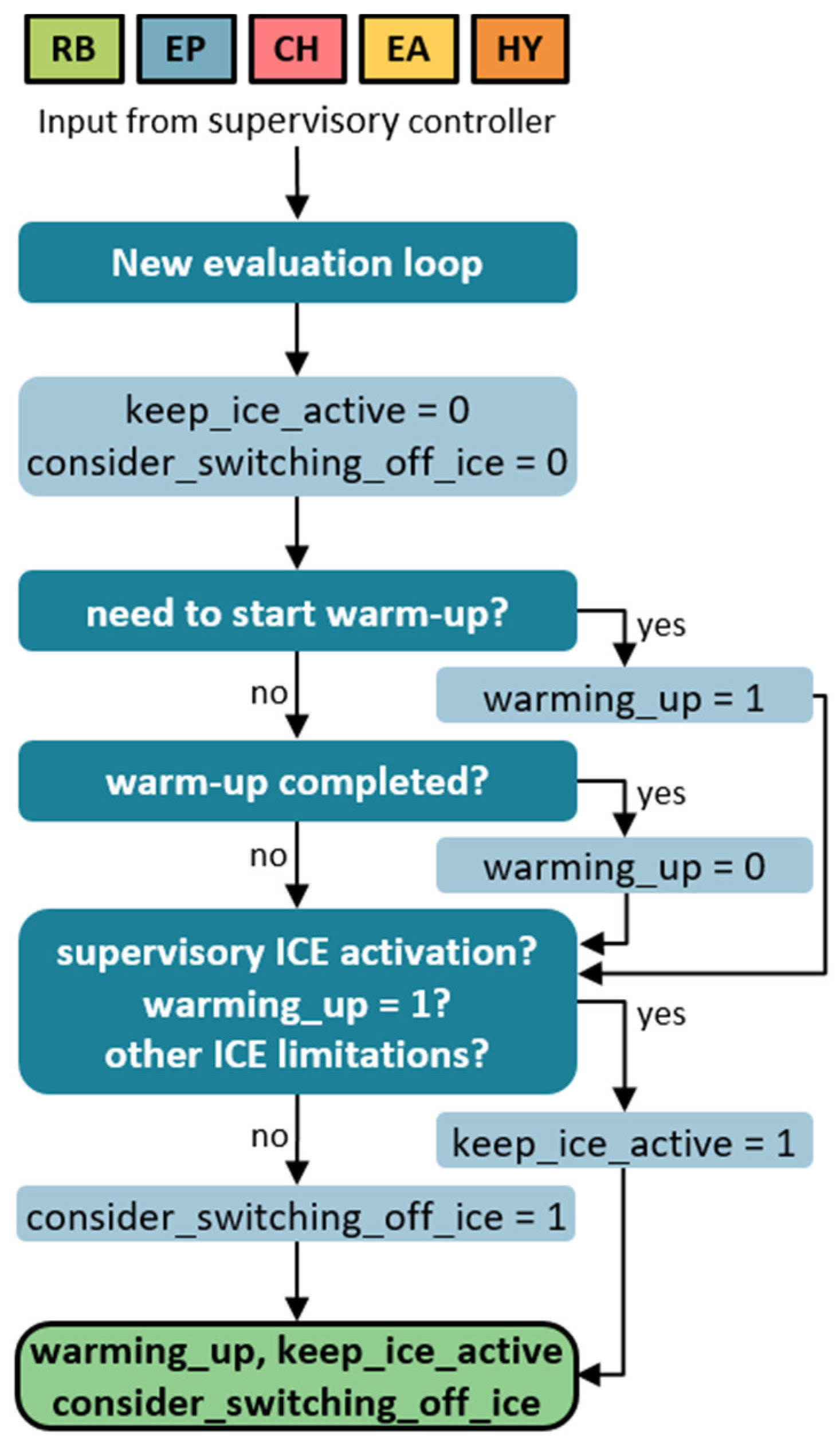
2.6.2. ICE Manager
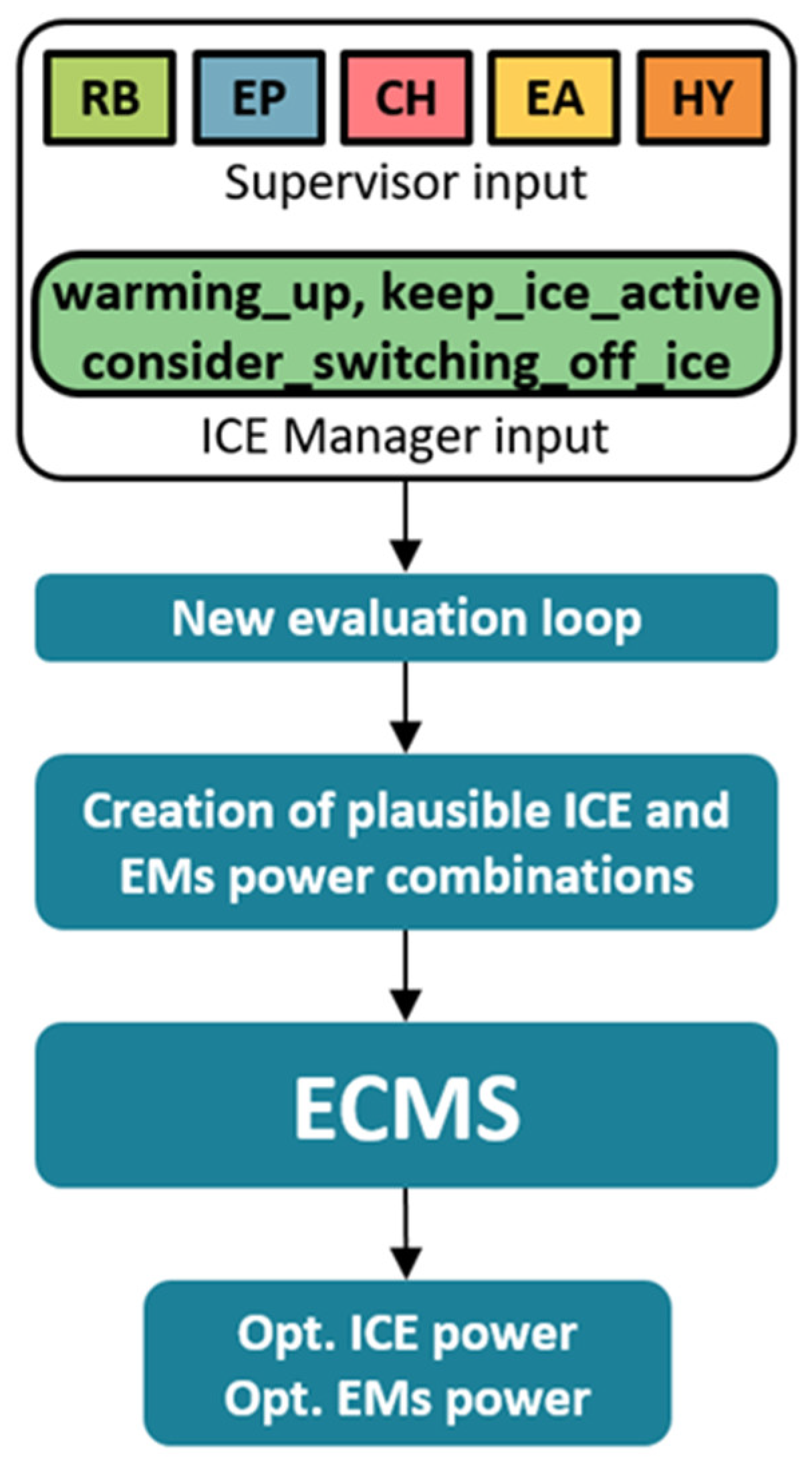
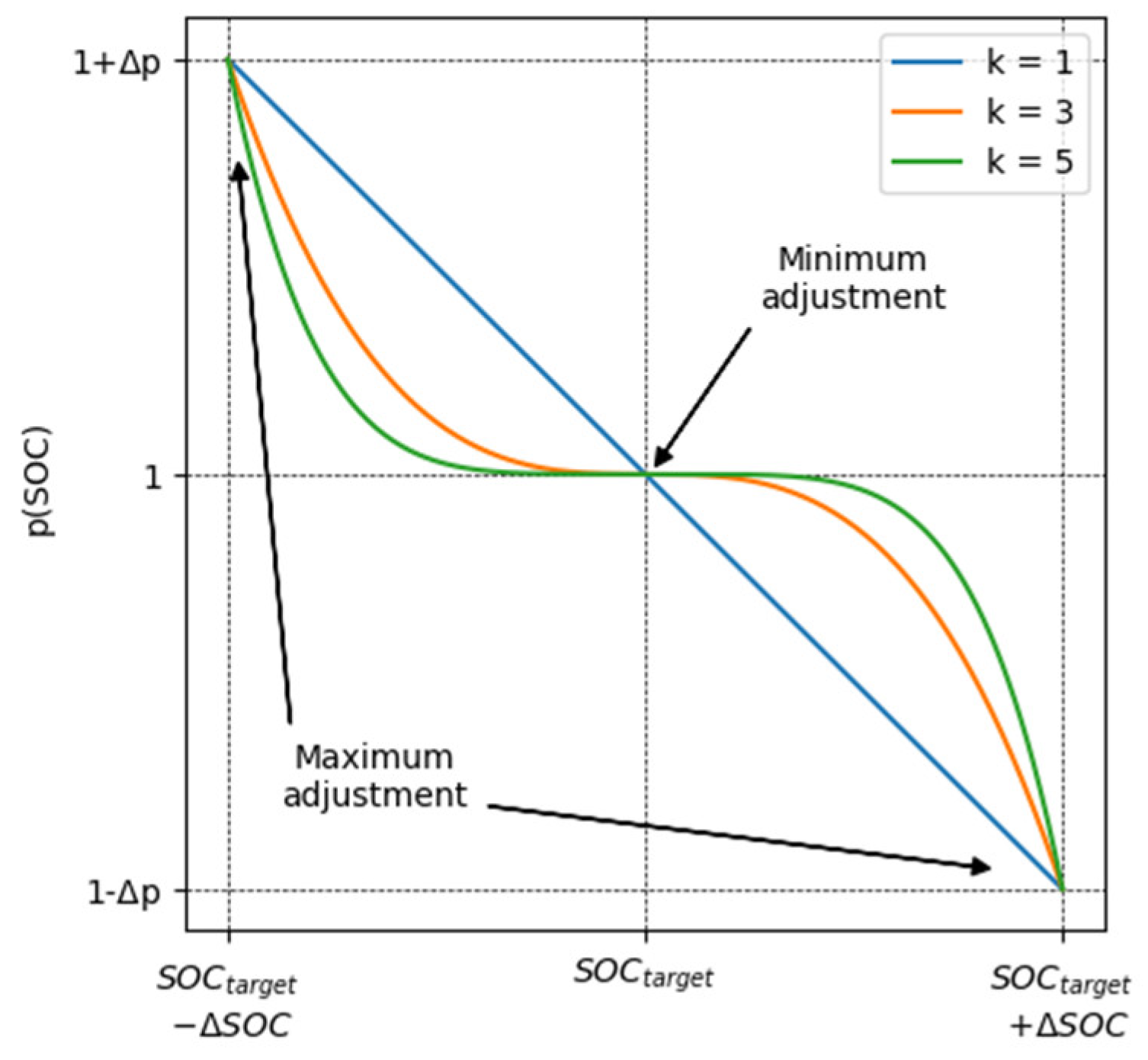
2.6.3. Optimiser
3. Results and Discussion
3.1. Model Validation
3.2. Validation Scheme
3.3. Discussion
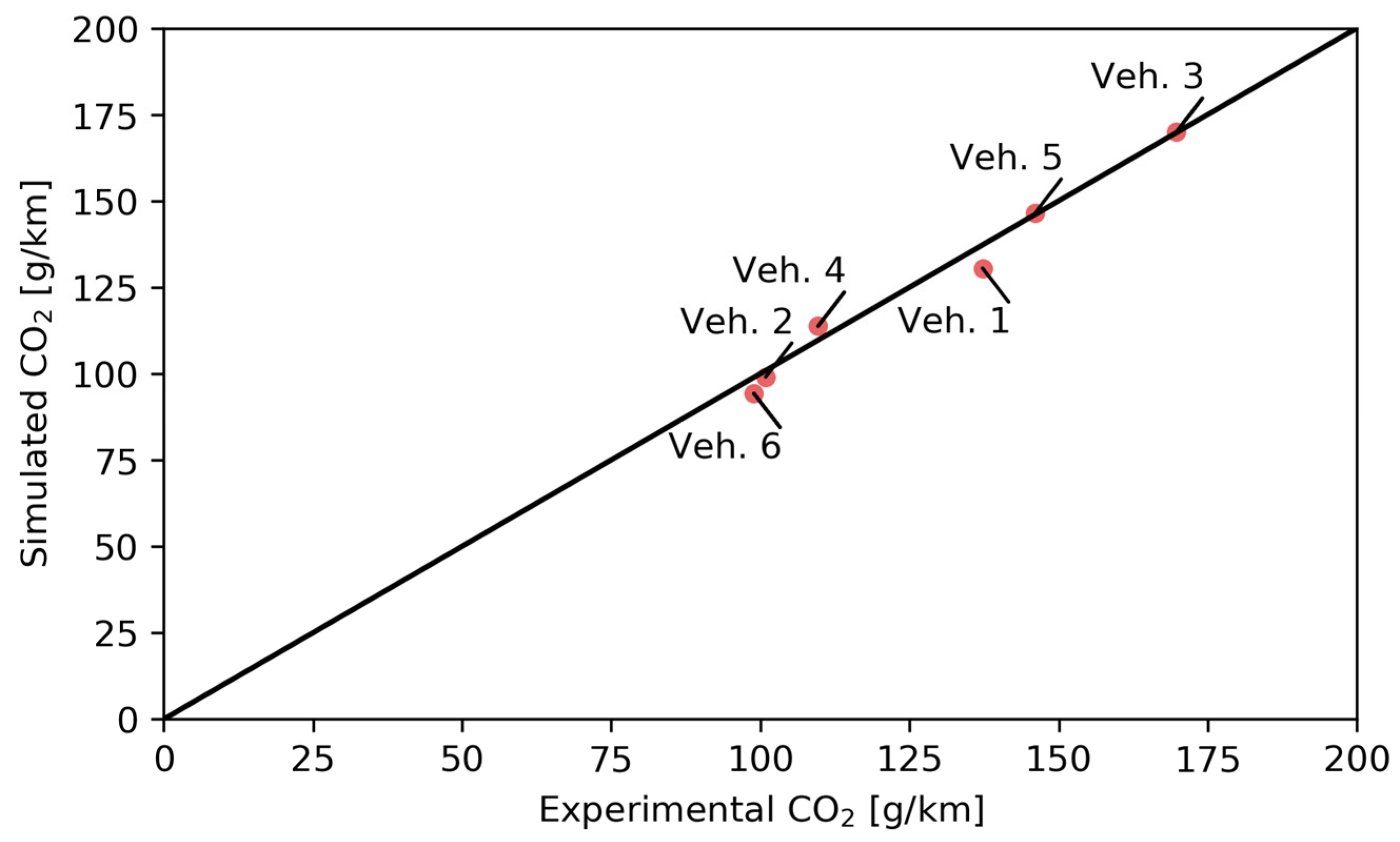
3.3.1. Absolute CO2 Emissions
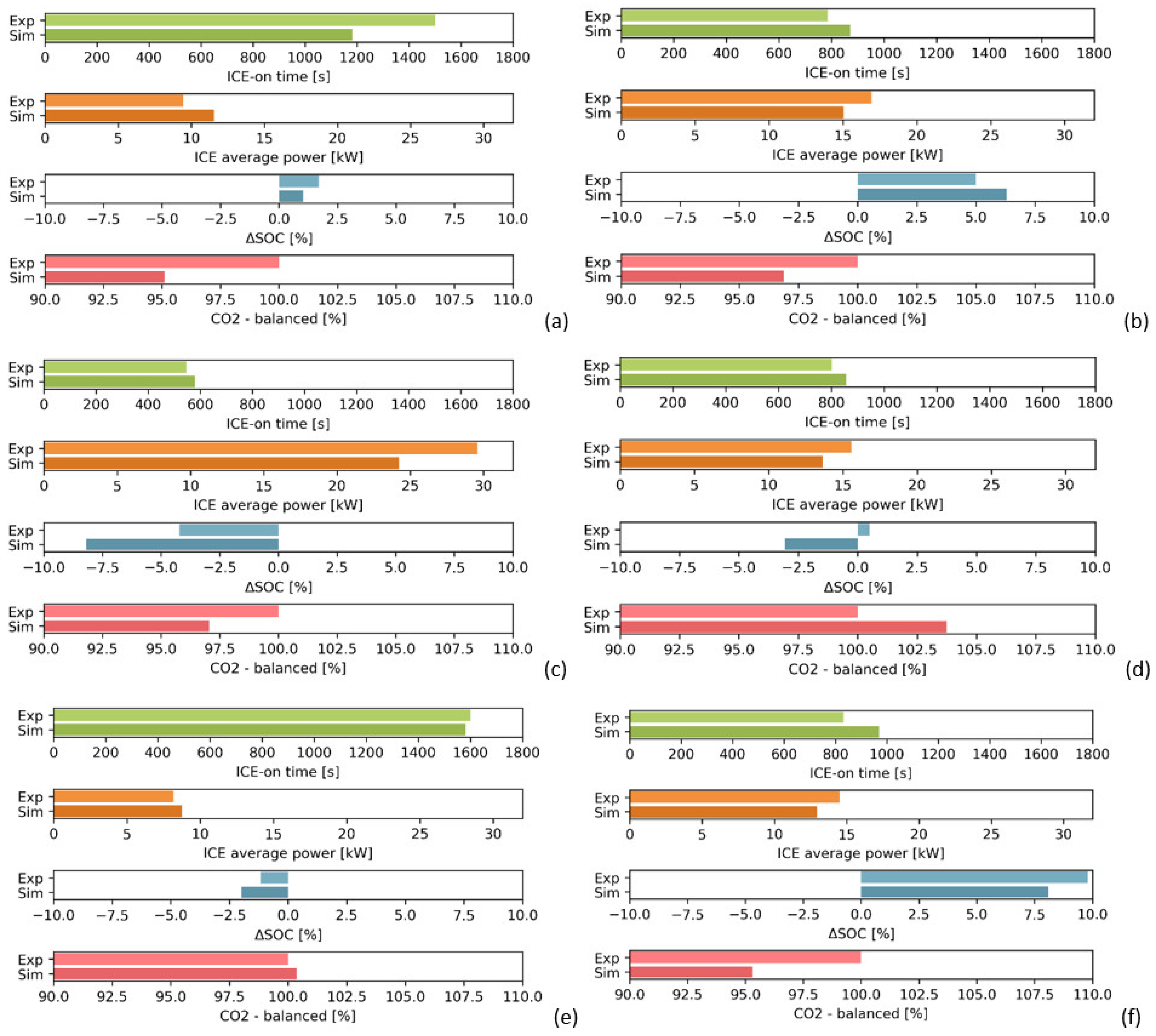
3.3.2. Simulation Accuracy
3.3.3. Comparison Other CO2 Emissions Calculation Tools
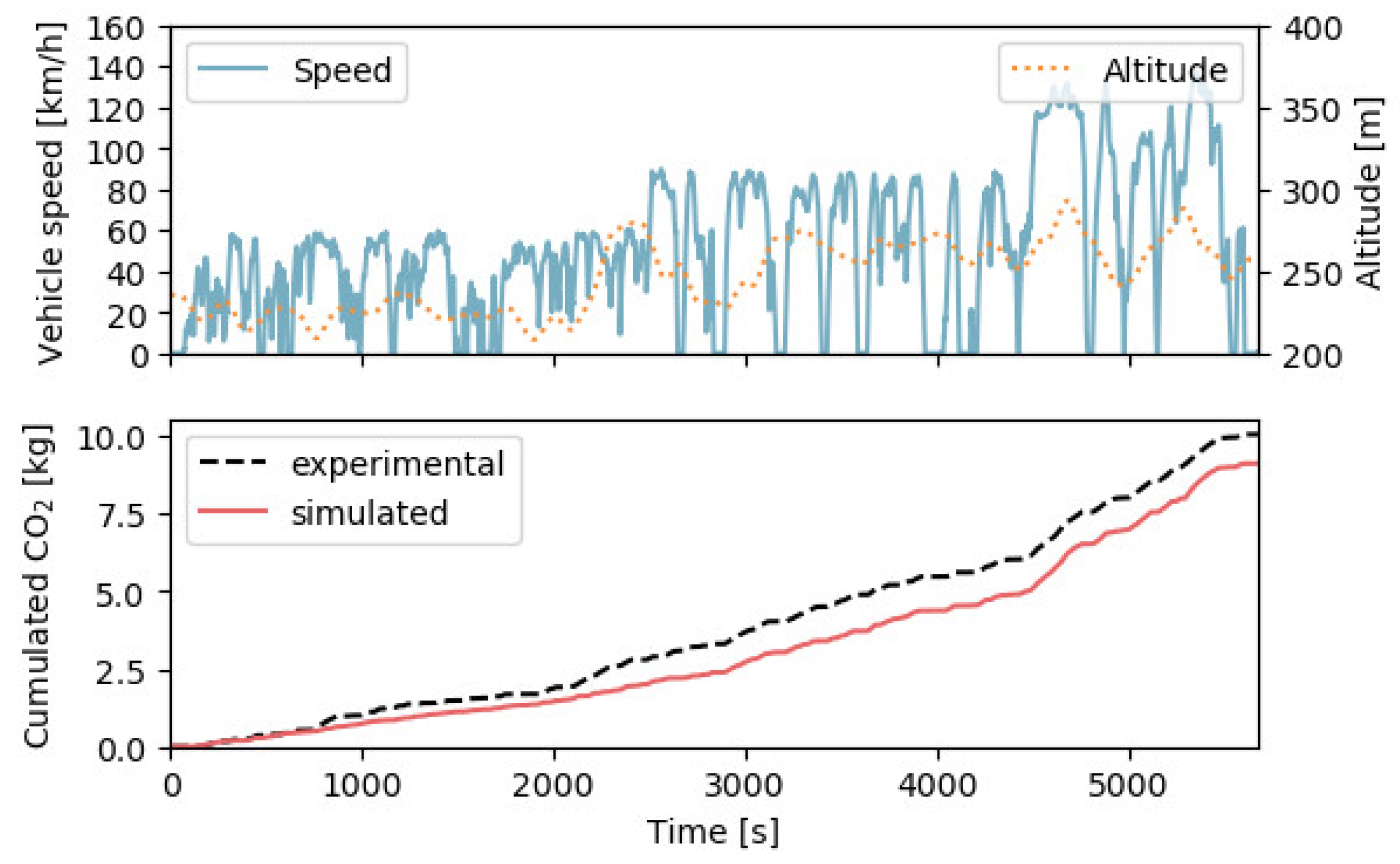
3.3.4. Real-World Trip Simulation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| AD | Air Drag |
| BEV | Battery Electric Vehicle |
| BMS | Battery Management System |
| CD | Charge Depleting |
| CH | Charging |
| CS | Charge Sustaining |
| CT | Clutch/Torque Converter |
| DC | Direct Current |
| EA | Electric Assist |
| EC | Energy Consumption |
| ECBM | Equivalent Circuit Battery Model |
| EE | Electric Energy |
| EEC | Electric Energy Consumption |
| EP | Electric Propulsion |
| EPS | Electric Power System |
| FC | Fuel Consumption |
| FD | Final Drive |
| HD | Heavy-Duty |
| HEV | Hybrid Electric Vehicle |
| HV | High Voltage |
| ICE | Internal Combustion Engine |
| LD | Light-Duty |
| LHV | Low Heating Value |
| LV | Low Voltage |
| OCV | Open Circuit Voltage |
| PPD | Planetary Power-split Device |
| PS | Planetary Side |
| RB | Regenerative Braking |
| RDE | Real Driving Emission |
| RR | Rolling Resistance |
| SB | Service Battery |
| SoC | State of Charge |
| TB | Traction Battery |
| TR | Transmission |
| WLTC | Worldwide harmonised Light vehicles Test Cycles |
| WLTP | Worldwide harmonised Light vehicles Test Procedure |
Appendix A. Vehicle Simulation and Power Calculation
Appendix B. Electrical Power System (EPS)
Appendix B.1. DC/DC Converter
Appendix B.2. Service Battery
Appendix B.3. Equivalent Circuit Battery Model Equations
Appendix C. Tested Vehicles

References
- European Commission. Regulation (EU) 2021/1119 of the European Parliament and of the Council of 30 June 2021 Establishing the Framework for Achieving Climate Neutrality and Amending Regulations (EC) No 401/2009 and (EU) 2018/1999 (‘European Climate Law’). 2021. Available online: http://data.europa.eu/eli/reg/2021/1119/oj (accessed on 16 March 2023).
- The International Council on Clean Transportation. Hybrid Vehicles: Technology Development And Cost Reduction. 2015. Available online: https://theicct.org/publication/hybrid-vehicles-trends-in-technology-development-and-cost-reduction (accessed on 16 March 2023).
- ACEA. Fuel Types of New Cars: Petrol 52.3%, Diesel 29.9%, Electric 6.8% Market Share First Quarter of 2020. 2020. Available online: https://www.acea.auto/fuel-pc/fuel-types-of-new-cars-petrol-52-3-diesel-29-9-electric-6-8-market-share-first-quarter-of-2020 (accessed on 16 March 2023).
- ACEA. Fuel Types of New Vans: Diesel 92.8%, Electric 1.2%, Alternative Fuels 1.3% Market Share in 2019. 2020. Available online: https://www.acea.auto/fuel-cv/fuel-types-of-new-vans-diesel-92-8-electric-1-2-alternative-fuels-1-3-market-share-in-2019 (accessed on 16 March 2023).
- ACEA. Fuel Types of New Buses: Diesel 85%, Hybrid 4.8%, Electric 4%, Alternative Fuels 6.2% Share in 2019. 2020. Available online: https://www.acea.auto/fuel-cv/fuel-types-of-new-buses-diesel-85-hybrid-4-8-electric-4-alternative-fuels-6-2-share-in-2019-2 (accessed on 16 March 2023).
- Wisdom, E.; Bannister, C. Modelling and control of hybrid electric vehicles (A comprehensive review). Renew. Sustain. Energy Rev. 2017, 74, 1210–1239. [Google Scholar]
- Denis, N.; Dubois, M.R.; Trovão, J.P.; Desrochers, A. Power Split Strategy Optimization of a Plug-in Parallel Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 315–326. [Google Scholar] [CrossRef]
- Çağatay Bayindir, K.; Ali Gözüküçük, M.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–10313. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems—Introduction to Modeling and Optimization, 2nd ed.; Springer: New York, NY, USA, 2005. [Google Scholar]
- Nguyen, A.; Lauber, J.; Dambrine, M. Optimal control based algorithms for energy management of automotive. Energy Convers. Manag. 2014, 87, 410–420. [Google Scholar] [CrossRef]
- Millo, F.; Rolando, L.; Andreata, M. Numerical Simulation for Vehicle Powertrain Development. In The Numerical Analysis—Theory and Application; IntechOpen: London, UK, 2011. [Google Scholar]
- Sciarretta, A.; Back, M.; Guzzella, L. Optimal Control of Parallel Hybrid Electric Vehicles. IEEE Trans. Control Syst. 2004, 12, 352–363. [Google Scholar] [CrossRef]
- A-ECMS: An adaptive algorithm for hybrid electric vehicle energy management. Eur. J. Control 2005, 11, 509–524. [CrossRef]
- Gu, B.; Rizzoni, G. An adaptive algorithm for hybrid electric vehicle energy management based on driving pattern recognition. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 30 October–3 November 2006. [Google Scholar]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. Online adaptive equivalent consumption minimization strategy for fuel cell hybrid electric vehicle considering power sources degradation. Energy Convers. Manag. 2019, 192, 133–149. [Google Scholar] [CrossRef]
- Finesso, R.; Spessa, E.; Venditti, M. Robust equivalent consumption-based controllers for a dual-mode diesel parallel HEV. Energy Convers. Manag. 2016, 127, 129–139. [Google Scholar] [CrossRef]
- Fontaras, G.; Pistikopoulos, P.; Samaras, Z. Experimental evaluation of hybrid vehicle fuel economy and pollutant emissions over real-world simulation driving cycles. Atmos. Environ. 2008, 42, 4023–4035. [Google Scholar] [CrossRef]
- Frey, H.; Zheng, X.; Hu, J. Variability in Measured Real-World Operational Energy Use and Emission Rates of a Plug-In Hybrid Electric Vehicle. Energies 2020, 13, 1140. [Google Scholar] [CrossRef] [Green Version]
- Paganelli, G.; Guerra, T.; Delprat, S.; Santin, J.; Delhom, M.; Combes, E. Simulation and assessment of power control strategies for a parallel hybrid car. J. Automob. Eng. 2000, 214, 705–717. [Google Scholar] [CrossRef]
- Oh, H.; Lee, J.; Woo, S.; Park, H. Effect of synergistic engine technologies for 48 V mild hybrid electric vehicles. Energy Convers. Manag. 2021, 244, 114515. [Google Scholar] [CrossRef]
- Fuhs, A.E. Hybrid Vehicles and the Future of Personal Transportation; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Tansini, A. Flexible Calculation Approaches to Support the European CO2 Emissions Regulatory Scheme for Road Vehicles. Ph.D. Dissertation, Politecnico di Torino, Turin, Italy, 2020. [Google Scholar]
- DiPierro, G.; Millo, F.; Scassa, M.; Perazzo, A. An Integrated Methodology for 0D Map-Based Powertrain Modelling Applied to a 48 V Mild-Hybrid Diesel Passenger Car; SAE Technical Paper 2018-01-1659; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Larsson, M. Electric Motors for Vehicle Propulsion; Linköpings Universitet: Linköping, Sweden, 2014. [Google Scholar]
- da Silva, S.F.; Eckert, J.J.; Silva, F.L.; Silva, L.C.; Dedini, F.G. Hybrid Electric Powertrain Design and Control. Ph.D. Dissertation, University of Michigan, Ann Arbor, MI, USA, 2018. Available online: https://theses.hal.science/tel-00863541 (accessed on 16 March 2023).
- Young, K.; Wang, C.; Wang, L.Y.; Strunz, K. Electric Vehicle Battery Technologies. In Electric Vehicle Integration into Modern Power Networks; Springer: New York, NY, USA, 2012; pp. 15–56. [Google Scholar]
- Lee, S.; Cherry, J.; Safoutin, M.; McDonald, J.; Olechiw, M. Modeling and Validation of 48V Mild Hybrid Lithium-Ion Battery Pack. SAE Int. J. Alt. Power 2018, 7, 273–287. [Google Scholar] [CrossRef]
- Bharathraj, S.; Adiga, S.P.; Patil, R.S.; Mayya, K.S.; Song, T.; Sung, Y. An Efficient and Chemistry Independent Analysis to Quantify Resistive and Capacitive Loss Contributions to Battery Degradation. Sci. Rep. 2019, 9, 6576. [Google Scholar] [CrossRef] [Green Version]
- Rolando, L. An Innovative Methodology for the Development of HEVs Energy Management System. Ph.D. Dissertation, Politecnico di Torino, Turin, Italy, 2012. [Google Scholar]
- Millo, F.; Rolando, L.; Fuso, R.; Bergshoeff, E.; Shafiabady, F. Analysis of Different Energy Management Strategies for Complex Hybrid Electric Vehicles. Comput.-Aided Des. Appl. 2014, 11, S1–S10. [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Equivalent Consumption Minimization Strategy. In The Hybrid Electric Vehicles Energy Management Strategies; Springer: New York, NY, USA, 2015; pp. 65–77. [Google Scholar]
- Cubito, C. A Policy-Oriented Vehicle Simulation Approach for Estimating the CO2 Emissions from Hybrid Light Duty Vehicles. Ph.D. Dissertation, Politecnico di Torino, Turin, Italy, 2017. [Google Scholar]
- X-Engineer. Mild Hybrid Electric Vehicle (MHEV)—Control Functions. Available online: https://x-engineer.org/mild-hybrid-electric-vehicle-mhev-control-function/ (accessed on 16 March 2023).
- Ha, S.; Park, T.; Na, W.; Lee, H. Power distribution control algorithm for fuel economy optimization of 48V mild hybrid vehicle. In Proceedings of the International Conference on Modeling and Applied Simulation, Barcelona, Spain, 18–20 September 2017. [Google Scholar]
- Franco, V.; Kousoulidou, M.; Muntean, M.; Ntziachristos, L.; Hausberger, S.; Dilara, P. Road vehicle emission factors development: A review. Atmos. Environ. 2013, 70, 84–97. [Google Scholar] [CrossRef]
- Clairotte, M.; Suarez-Bertoa, R.; Zardini, A.; Giechaskiel, B.; Pavlovic, J.; Valverde, V.; Ciuffo, B.; Astorga, C. Exhaust emission factors of greenhouse gases (GHGs) from European road vehicles. Environ. Sci. Eur. 2020, 32, 1–20. [Google Scholar] [CrossRef]
- EMEP/EEA Air Pollutant Emission Inventory Guidebook 2019: Technical Guidance to Prepare National Emission Inventories; Publications Office of the European Union: Luxembourg, 2019.
- Tansini, A.; Pavlovic, J.; Fontaras, G. Quantifying the real-world CO2 emissions and energy consumption of modern plug-in hybrid vehicles. J. Clean. Prod. 2022, 362, 132191. [Google Scholar] [CrossRef]
- Millo, F.; Rolando, L.; Pulvirenti, L.; Di Pierro, G. A Methodology for the Reverse Engineering of the Energy Management Strategy of a Plug-In Hybrid Electric Vehicle for Virtual Test Rig Development. SAE Int. J. Elec. Veh. 2022, 11, 113–132. [Google Scholar] [CrossRef]
- Tsiakmakis, S.; Fontaras, G.; Anagnostopoulos, K.; Ciuffo, B.; Pavlovic, J.; Marotta, A. A simulation based approach for quantifying CO2 emissions of light duty vehicle fleets. A case study on WLTP introduction. Transp. Res. Procedia. 2017, 25, 3898–3908. [Google Scholar] [CrossRef]
- European Commission. Commission Regulation (EU) 2017/1151 of 1 June 2017. 2017. Available online: http://data.europa.eu/eli/reg/2017/1151/2020-01-25 (accessed on 16 March 2023).
- Pavlovic, J.; Ciuffo, B.; Fontaras, G.; Valverde, V.; Marotta, A. How much difference in type-approval CO2 emissions from passenger cars in Europe can be expected from changing to the new test procedure (NEDC vs. WLTP)? Transp. Res. Part A Policy Pract. 2018, 111, 136–147. [Google Scholar] [CrossRef]
- Komnos, D.; Fontaras, G.; Ntziachristos, L.; Pavlovic, J. An Experimental Methodology for Measuring Resistance Forces of Light-Duty Vehicles under Real-World Conditions and the Impact on Fuel Consumption. In Proceedings of the WCX SAE World Congress Experience, Detroit, MI, USA, 5–7 April 2022. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mild | Full | Plug-in | Range Extender | |
|---|---|---|---|---|
| Serial | - | ✓ | ||
| Serial/Parallel | - | ✓ | - | |
| Power-split | - | ✓ | - | |
| Parallel | ✓ | ✓ | ✓ | - |
| Architecture | Electrification Degree | Segment | EMs to ICE Power Ratio | |
|---|---|---|---|---|
| Vehicle 1 | Serial | Range Extender | Hatchback | 5.0 |
| Vehicle 2 | Parallel | Full | SUV/Crossover | 0.4 |
| Vehicle 3 | Serial-Parallel | Plug-in | SUV | 1.3 |
| Vehicle 4 | Parallel | Plug-in | SUV/Crossover | 0.6 |
| Vehicle 5 | Parallel | Mild | Hatchback | 0.1 |
| Vehicle 6 | Power-split | Full | Hatchback | 0.7 |
| P0 | P1 | P2 | P2_PLA | P3f | P3r | |
|---|---|---|---|---|---|---|
| Vehicle 1 | ✓ | ✓ | ||||
| Vehicle 2 | ✓ | ✓ | ||||
| Vehicle 3 | ✓ | ✓ | ✓ | |||
| Vehicle 4 | ✓ | ✓ | ||||
| Vehicle 5 | ✓ | |||||
| Vehicle 6 | ✓ | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tansini, A.; Fontaras, G.; Millo, F. A Multipurpose Simulation Approach for Hybrid Electric Vehicles to Support the European CO2 Emissions Framework. Atmosphere 2023, 14, 587. https://doi.org/10.3390/atmos14030587
Tansini A, Fontaras G, Millo F. A Multipurpose Simulation Approach for Hybrid Electric Vehicles to Support the European CO2 Emissions Framework. Atmosphere. 2023; 14(3):587. https://doi.org/10.3390/atmos14030587
Chicago/Turabian StyleTansini, Alessandro, Georgios Fontaras, and Federico Millo. 2023. "A Multipurpose Simulation Approach for Hybrid Electric Vehicles to Support the European CO2 Emissions Framework" Atmosphere 14, no. 3: 587. https://doi.org/10.3390/atmos14030587
APA StyleTansini, A., Fontaras, G., & Millo, F. (2023). A Multipurpose Simulation Approach for Hybrid Electric Vehicles to Support the European CO2 Emissions Framework. Atmosphere, 14(3), 587. https://doi.org/10.3390/atmos14030587