
Simulation Study of the Lunar Spectral Irradiances and the Earth-Based Moon Observation Geometry

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Data and Coordination System
2.1.1. Data Collection
2.1.2. The Basic Coordinate System
- 1.
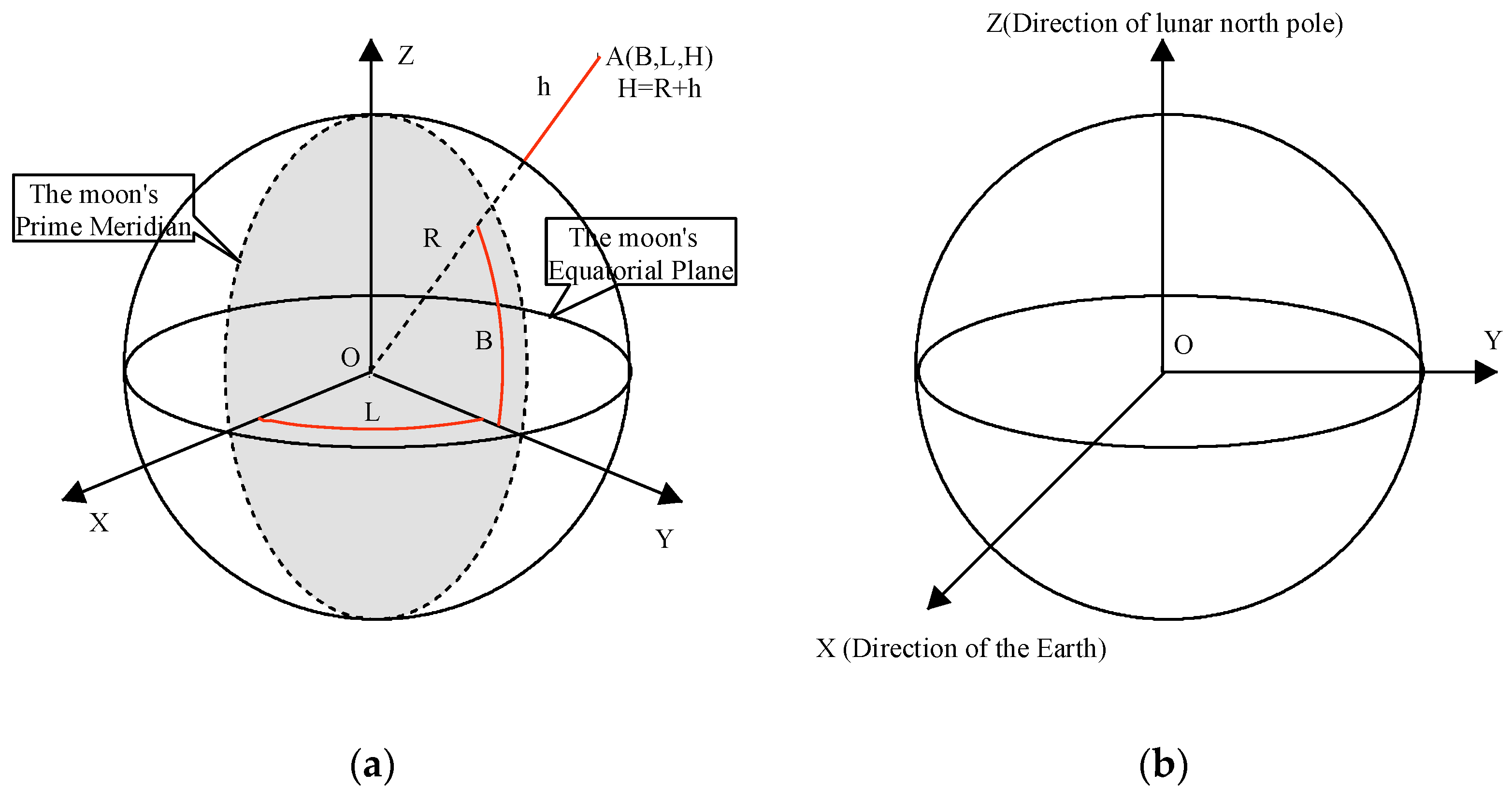
- The Lunar Geographic Coordinate System
- 2.
- The lunar-fixed system
- 3.
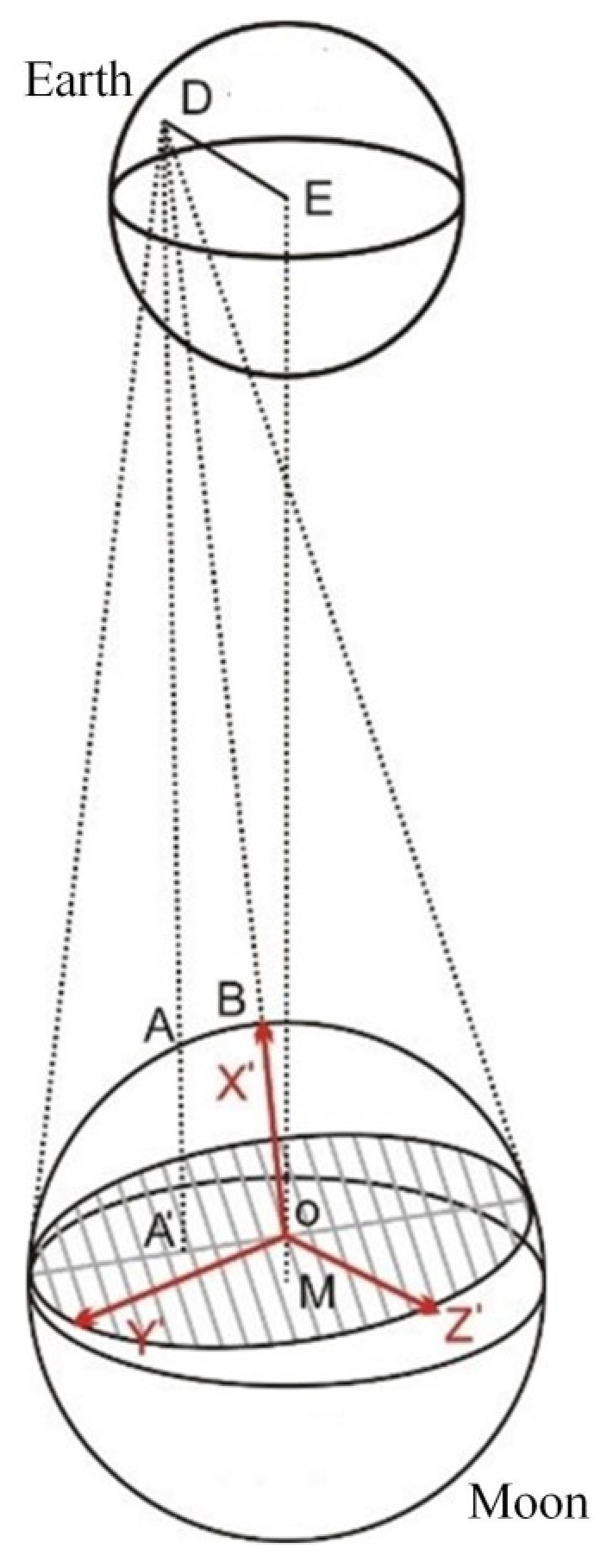
- Instantaneous coordinate system
2.2. Methods
2.2.1. Hapke Model
2.2.2. The Transformation Relationship of the Basic Coordinate Systems
- 1.
- Transformation of lunar geodetic coordinates to lunar fixed coordinates.
- 2.
- Transformation of lunar fixed coordinates to three-dimensional instantaneous coordinates.
- 3.
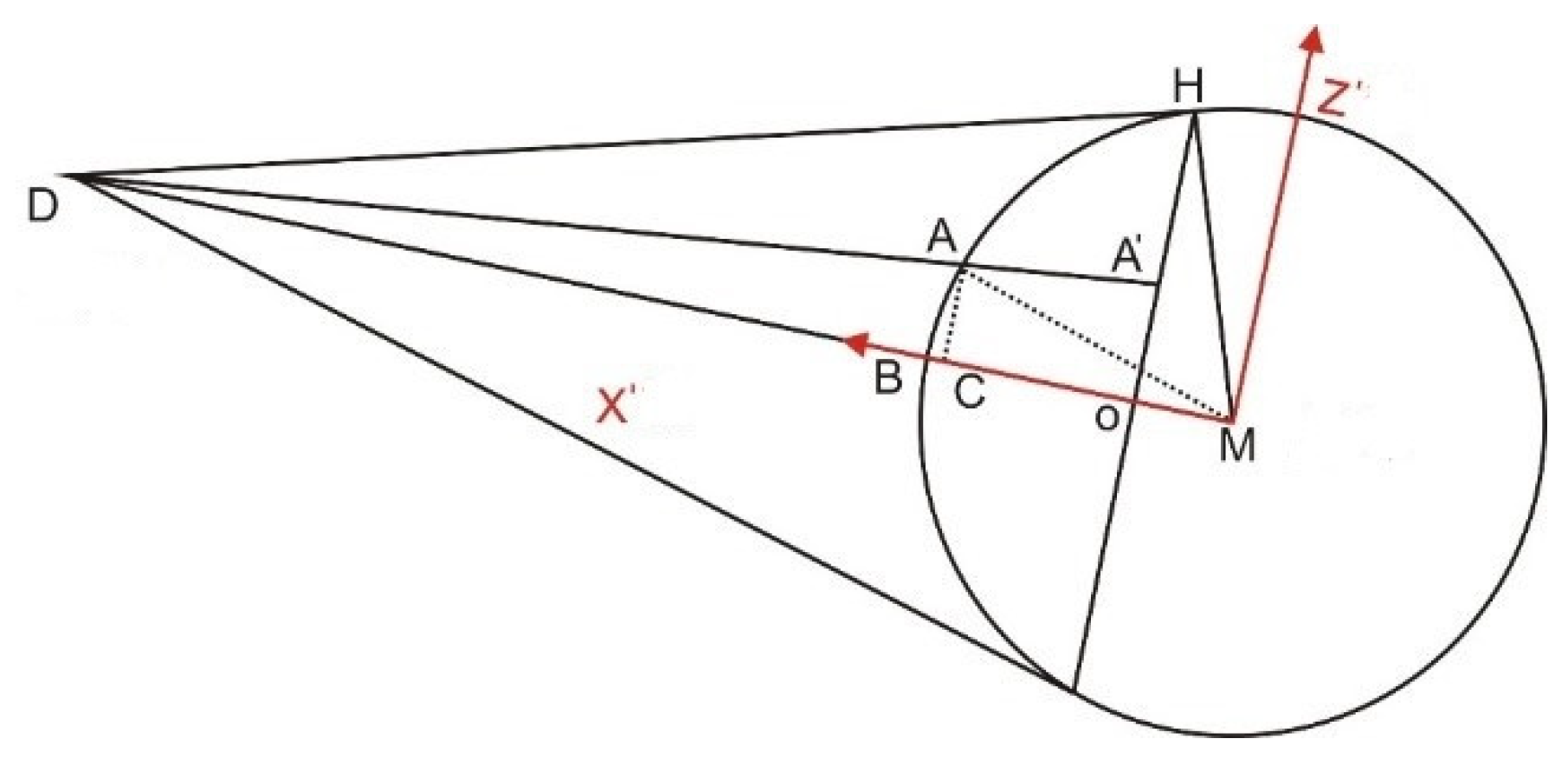
- Transformation of three-dimensional instantaneous coordinates to instantaneous projection plane coordinates.
3. Results and Discussion
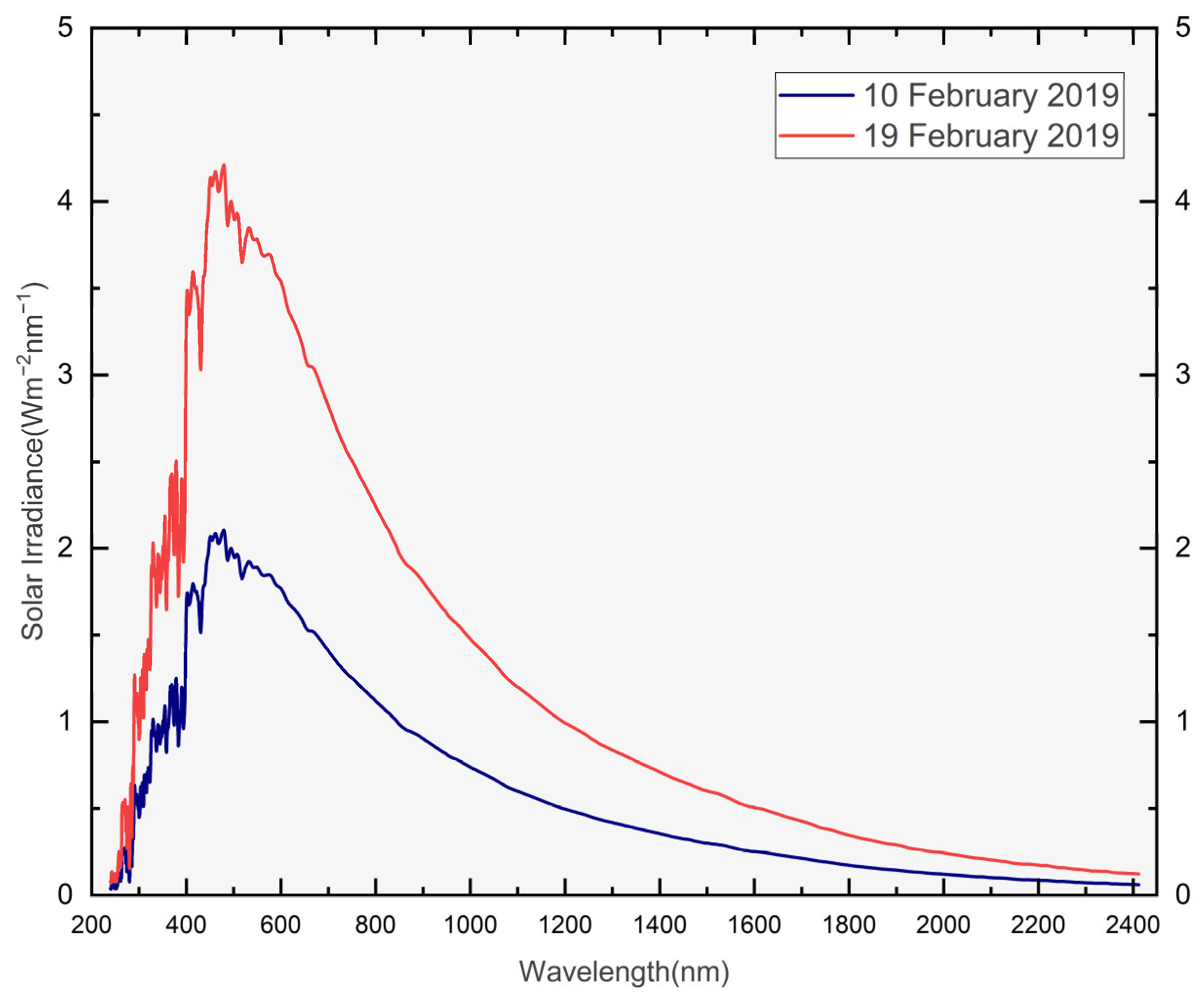
3.1. Observation Environment
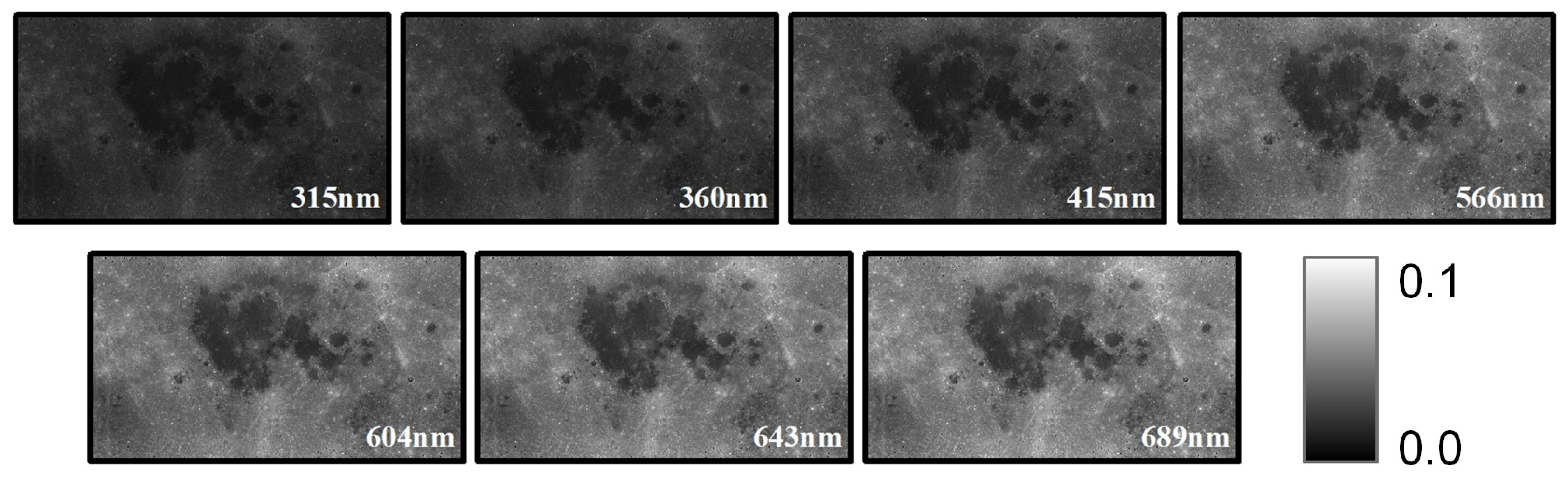
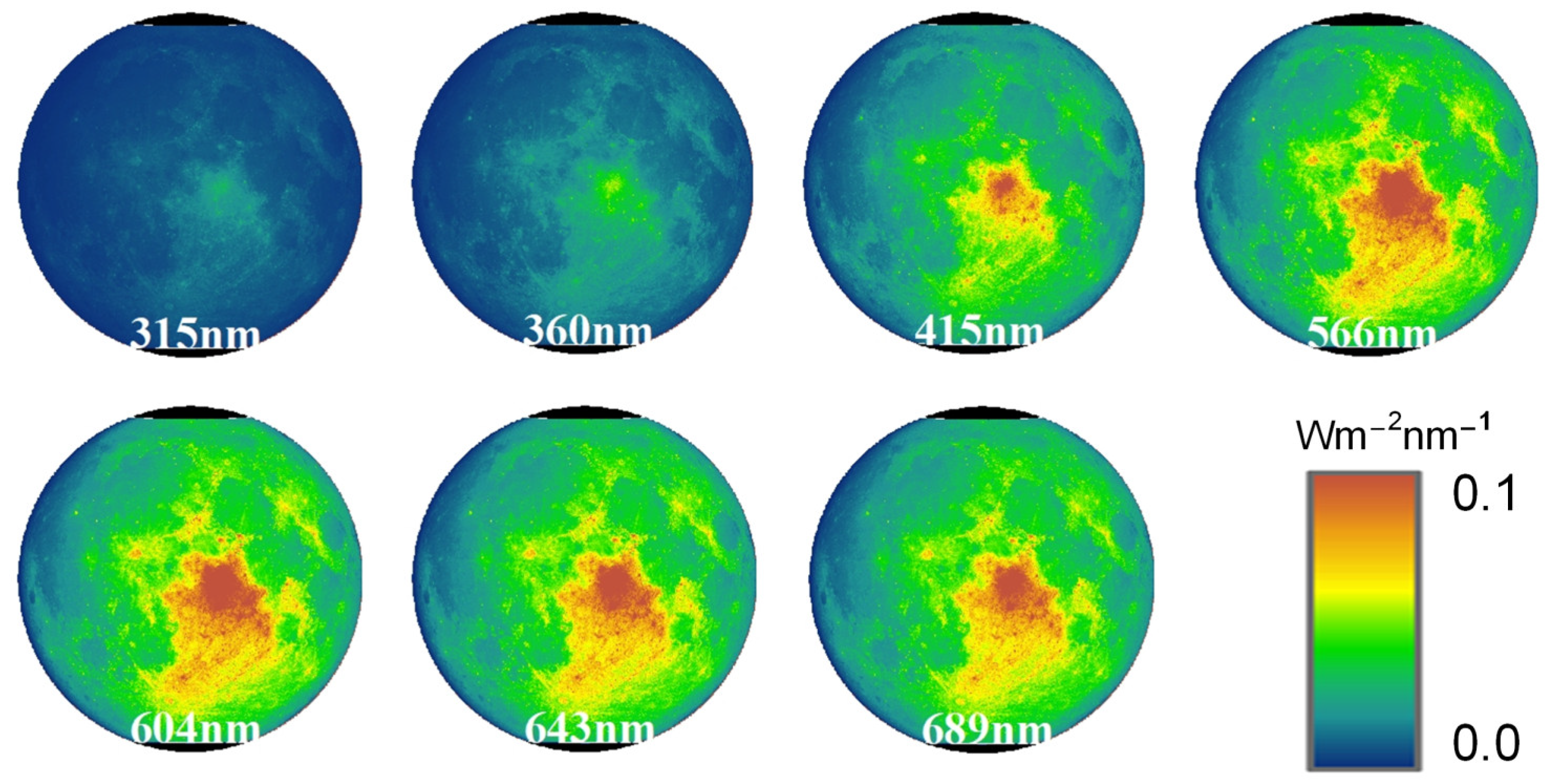
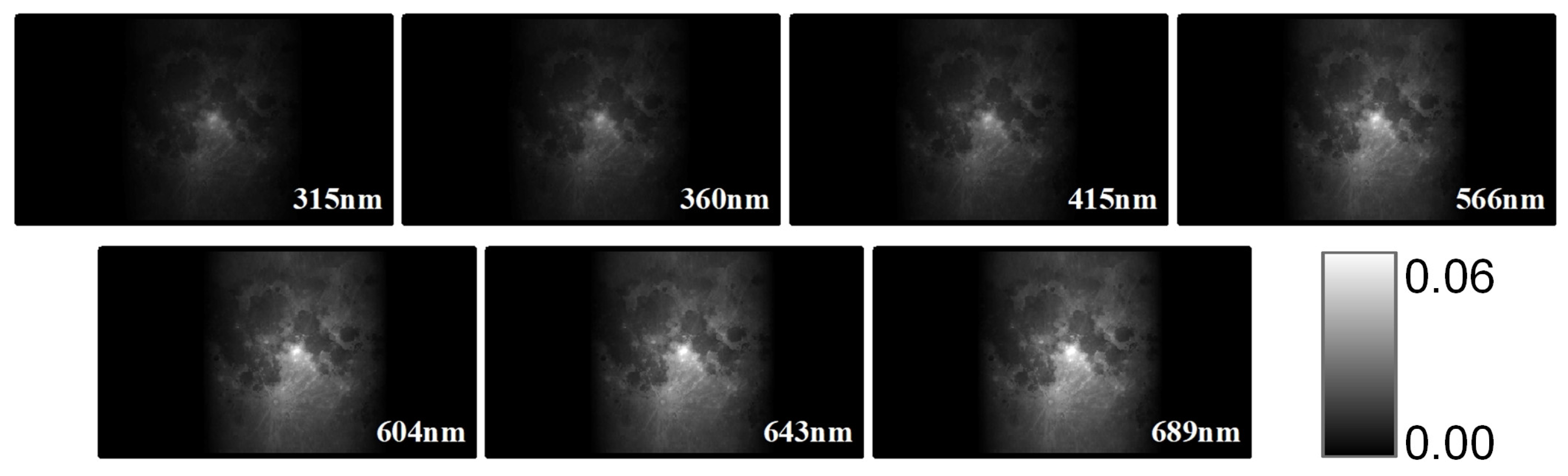
3.2. Lunar Spectral Irradiances Simulation
3.3. The Earth-Based Moon Observation Geometry
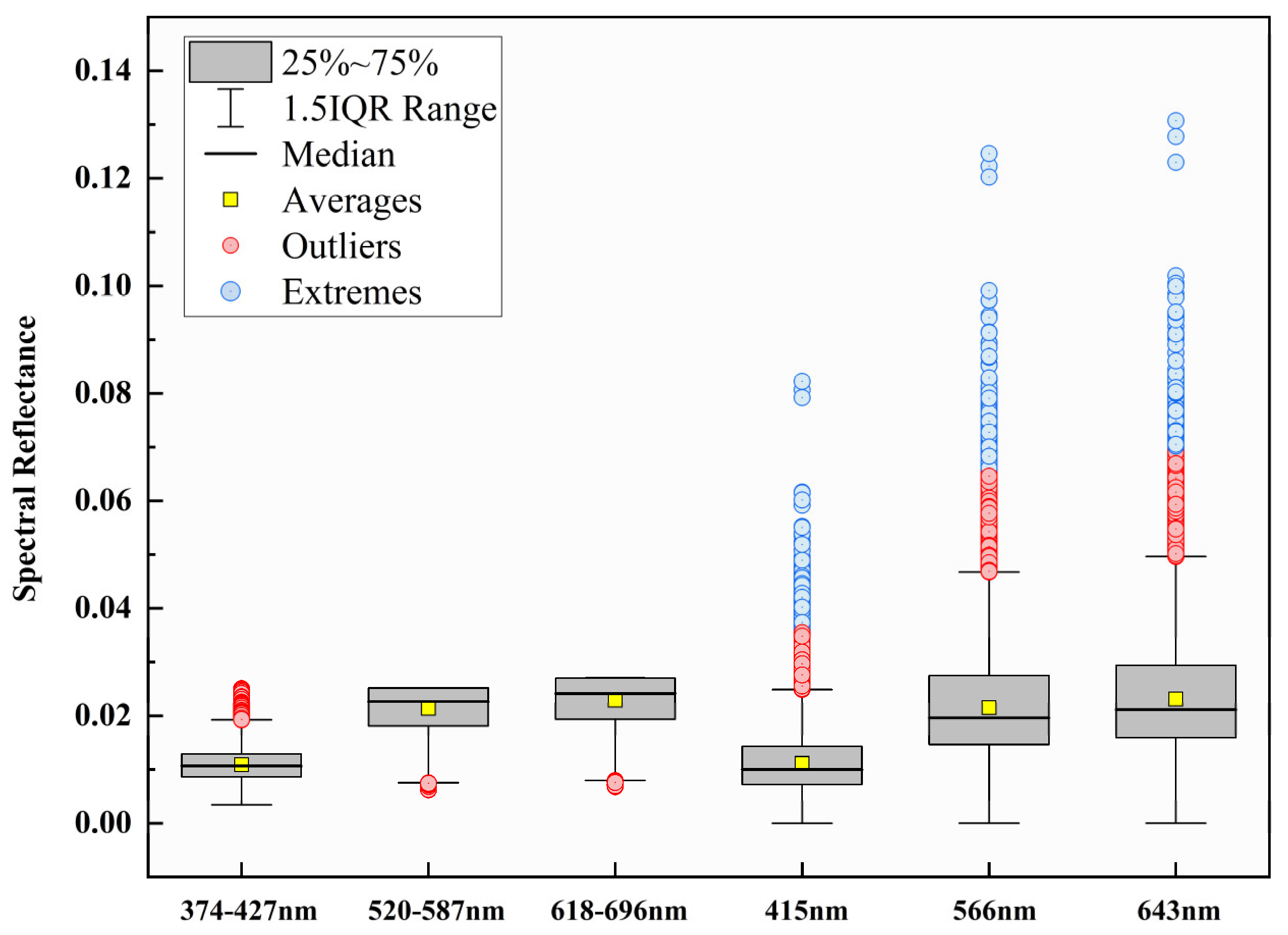
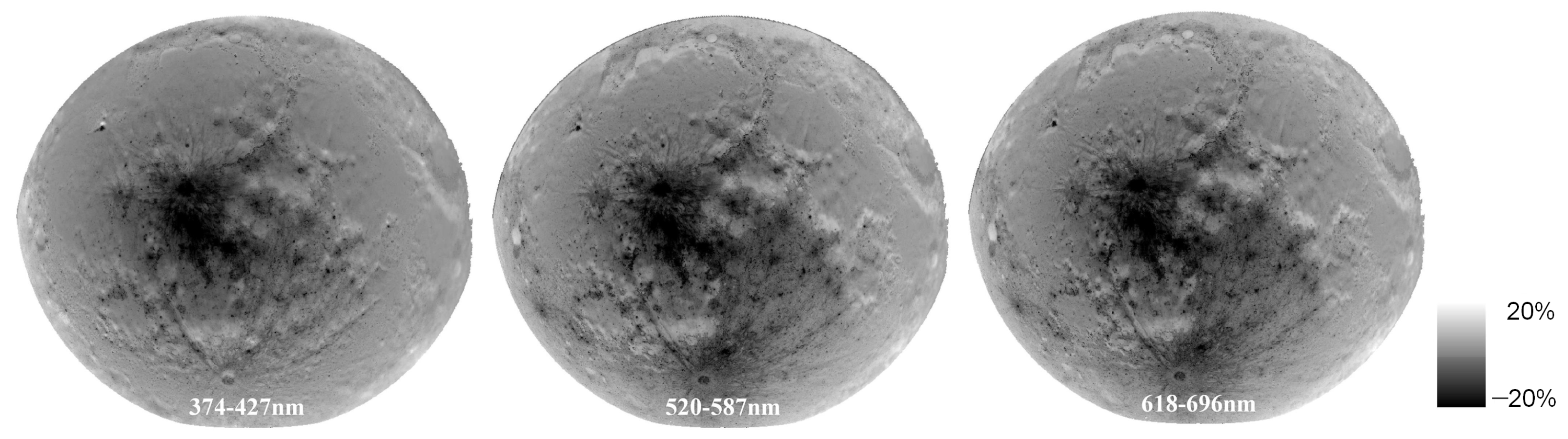
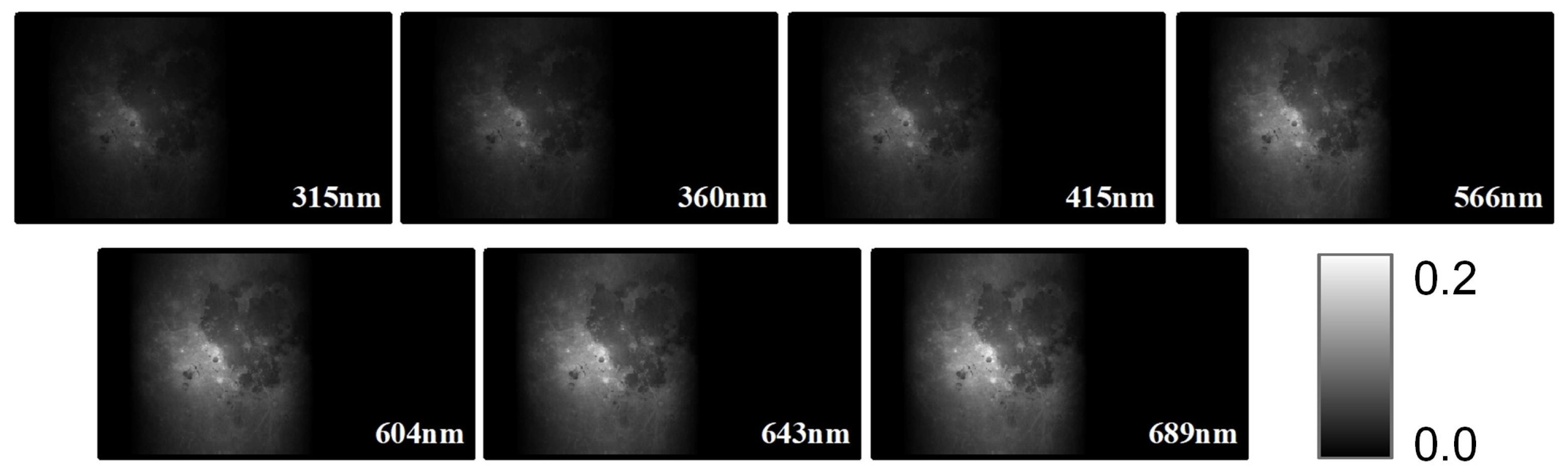
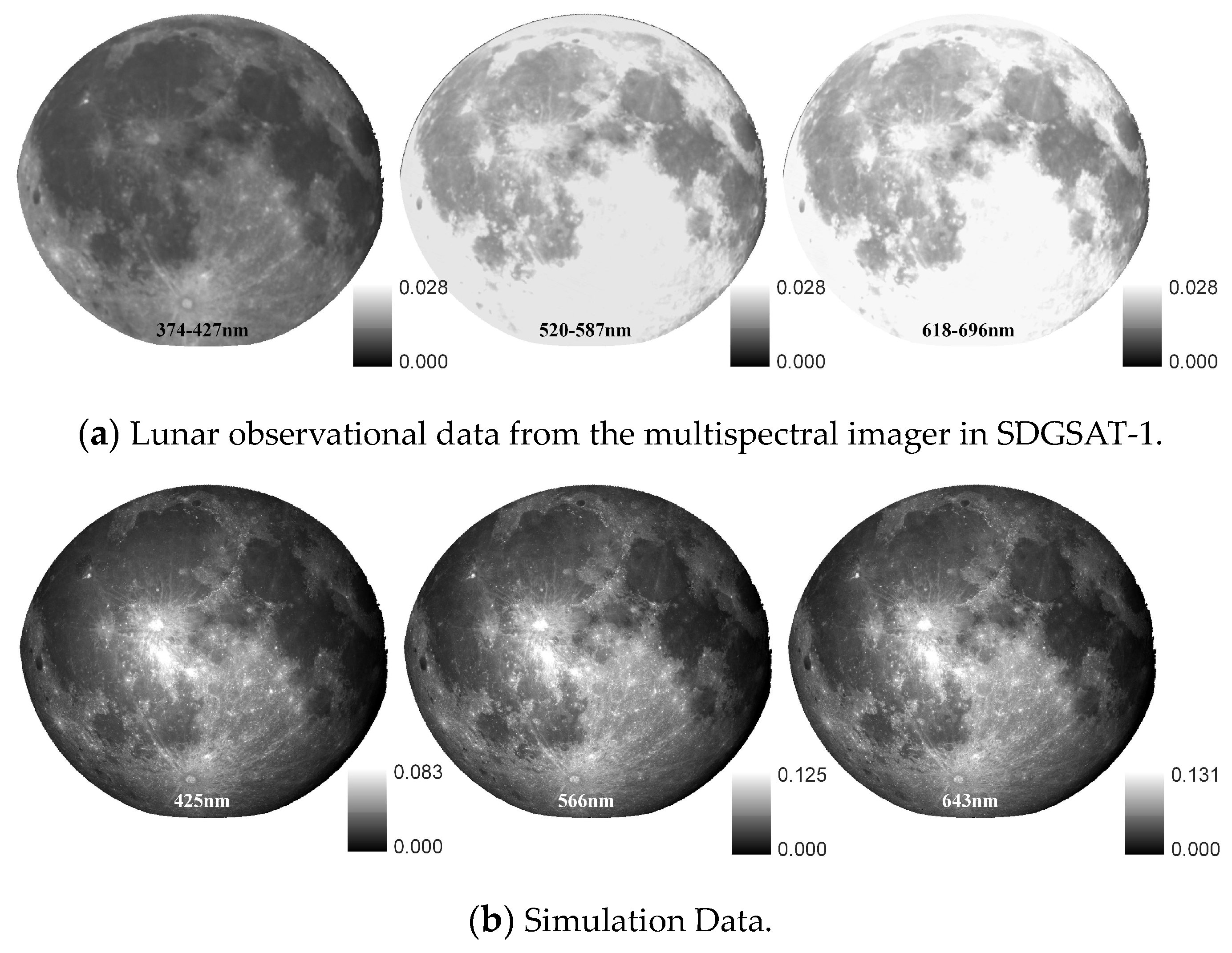
3.4. Satellite-Based Lunar Observation Verification
4. Conclusions
- (1)
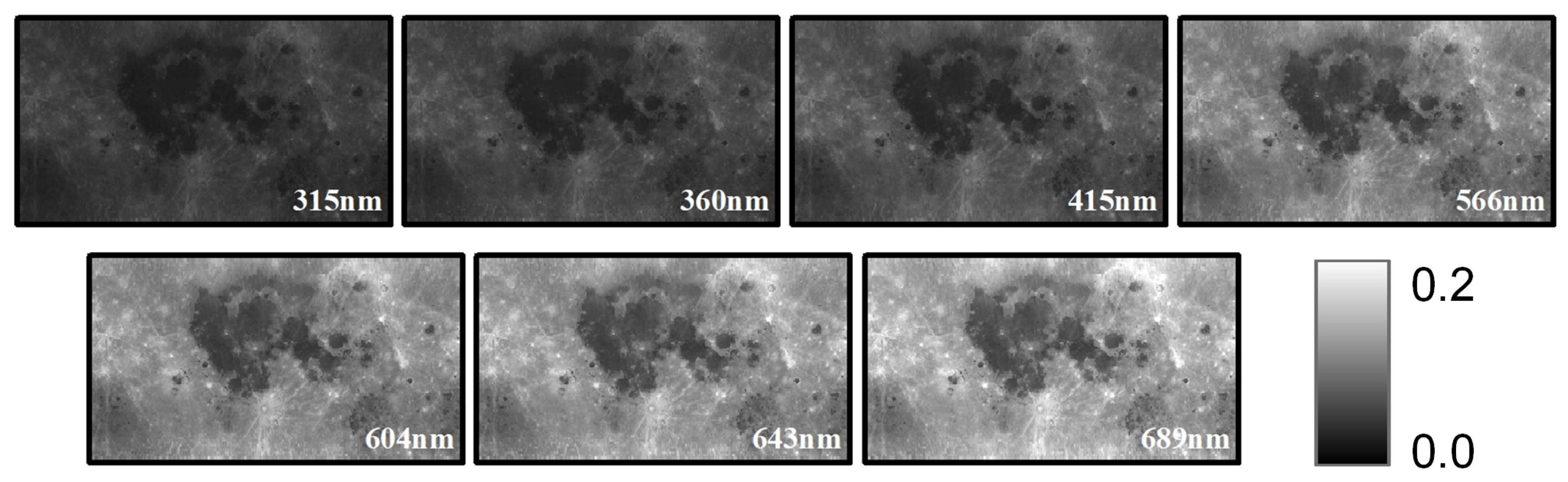
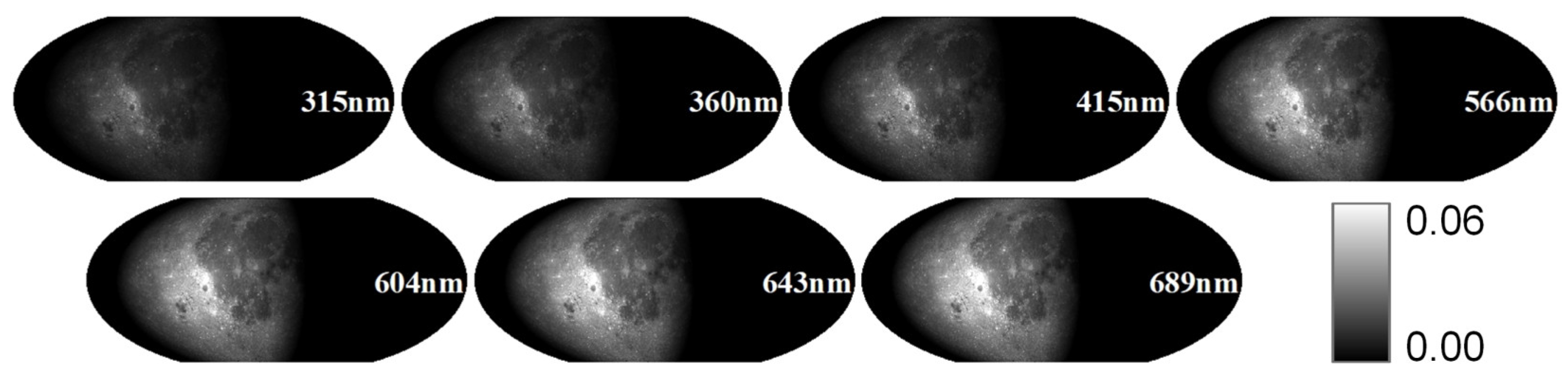
- Based on the standard reflectance data and reflection factors from MDRHAP and SDRPHO products, we achieved the determination of the lunar bidirectional spectral reflectance at the observation time through the application of the Hapke bidirectional reflectance function. By aligning these findings with lunar bidirectional spectral reflectance and the SOR3SIMD product, we were able to determine the distribution of lunar spectral irradiances at the observation time, culminating in the procurement of the lunar albedo at the observation time.
- (2)
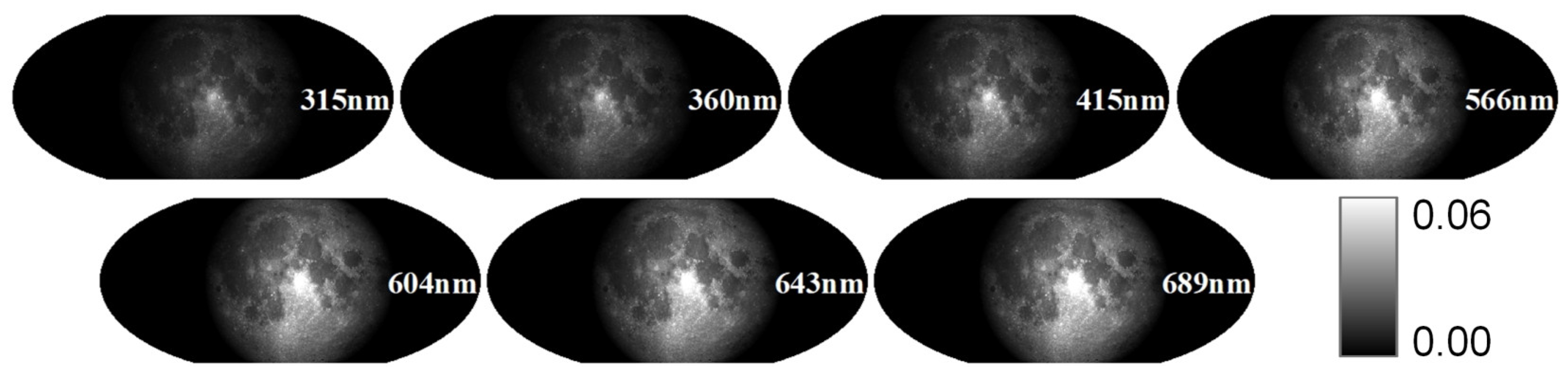
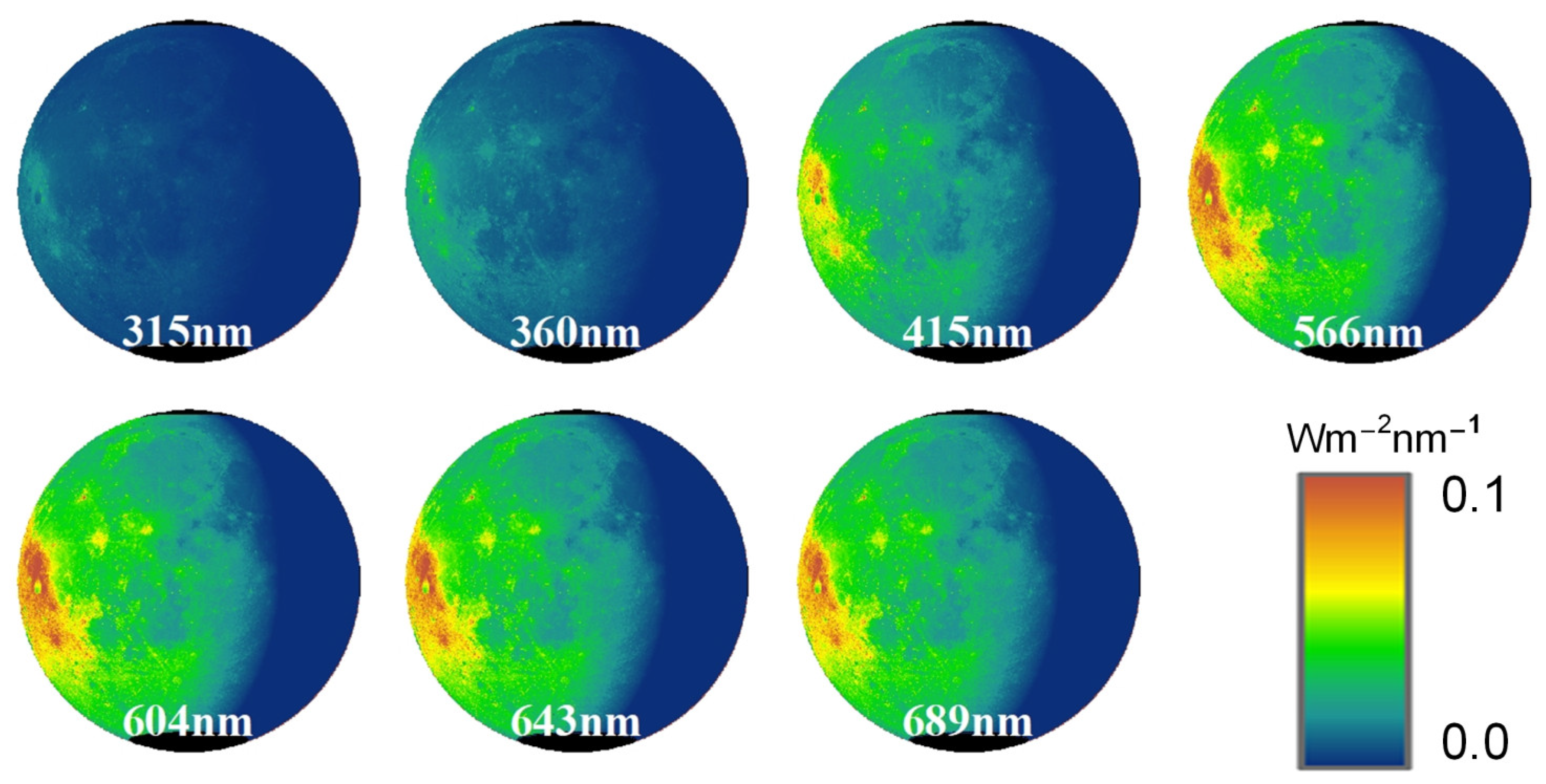
- Based on the obtaining of the distribution of the lunar irradiances at the observation time, we established conversion relationships amongst different coordinate systems. These transformations included the lunar-geographic to lunar-fixed-coordinate system, lunar-fixed to instantaneous coordinate system, and instantaneous to the two-dimensional instantaneous projection plane coordinate system. Following this, the distribution of the lunar irradiances in the lunar projection plane at the observation time could be obtained quickly, conveniently, and accurately. As a summative point, this study stands as a critical benchmark in the field, constructing an intricate geometric model for Earth-based Moon observation. SDGSAT-1 was employed for lunar observation experiments, further validating the precision of the research findings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A




References
- Green, P.D.; Fox, N.P.; Lobb, D.; Friend, J. The traceable radiometry underpinning terrestrial and helio studies (TRUTHS) mission. In Proceedings of the SPIE 9639, Sensors, Systems, and Next-Generation Satellites XIX, Toulouse, France, 12 October 2015; Volume 96391C. [Google Scholar]
- Leckey, J. Climate absolute radiance and refractivity observatory (CLARREO). Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2015, XL-7/W3, 213–217. [Google Scholar]
- Kieffer, H.H.; Wildey, R.L. Absolute calibration of landsat instruments using the moon. Photogramm. Eng. Remote Sens. 1985, 51, 1391–1393. [Google Scholar]
- Kieffer, H.H. Photometric stability of the lunar surface. Icarus 1997, 130, 323–327. [Google Scholar]
- Kouyama, T.; Yokota, Y.; Ishihara, Y.; Nakamura, R.; Yamamoto, S.; Matsunaga, T. Development of an application scheme for the SELENE SP lunar reflectance model for radiometric calibration of hyperspectral and multispectral sensors. Planet. Space Sci. 2016, 124, 76–83. [Google Scholar]
- Kieffer, H.H.; Wildey, R.L. Establishing the Moon as a Spectral Radiance Standard. J. Atmos. Ocean. Technol. 1996, 13, 360–375. [Google Scholar]
- Kieffer, H.H.; Stone, T.C. The spectral irradiance of the moon. Astron. J. 2005, 129, 2887. [Google Scholar]
- Stone, T.C. Radiometric calibration stability and inter-calibration of solar-band instruments in orbit using the moon. In Proceedings of SPIE—The International Society for Optical Engineering; SPIE: Bellingham, WA, USA, 2008; Volume 7081, pp. 70810X–70810X-9. [Google Scholar]
- Zhang, L.; Zhang, P.; Hu, X.; Chen, L.; Min, M. A novel hyperspectral lunar irradiance model based on ROLO and mean equigonal albedo. Optik-Int. J. Light Electron Opt. 2017, 142, 657–664. [Google Scholar]
- Sun, J.Q.; Xiong, X.; Barnes, W.L.; Guenther, B. MODIS Reflective Solar Bands On-Orbit Lunar Calibration. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2383–2393. [Google Scholar]
- Kieffer, H.H.; Jarecke, P.J.; Pearlman, J. Initial lunar calibration observations by the EO-1 Hyperion imaging spectrometer. In Proceedings of SPIE—The International Society for Optical Engineering; SPIE: Bellingham, WA, USA, 2002; Volume 4480, pp. 243–253. [Google Scholar]
- Stone, T.C.; Kieffer, H.H.; Grant, I.F. Potential for calibration of geostationary meteorological satellite imagers using the Moon. In Proceedings of SPIE—The International Society for Optical Engineering; SPIE: Bellingham, WA, USA, 2005; Volume 5882, pp. 58820P-1–58820P-9. [Google Scholar]
- Barnes, R.A.; Eplee, R.E.; Patt, F.S., Jr.; McClain, C.R. Changes in the radiometric sensitivity of SeaWiFS determined from lunar and solar-based measurements. Appl. Opt. 1999, 38, 4649–4664. [Google Scholar]
- Barnes, W.; Xiong, X.; Eplee, R.; Sun, J.; Lyu, C.-H. Use of the Moon for Calibration and Characterization of MODIS, SeaWiFS, and VIRS. Neuropharmacology 2006, 30, 1269–1274. [Google Scholar]
- Xiong, X.; Butler, J.; Chiang, K.; Efremova, B.; Fulbright, J.; Lei, N.; McIntire, J.; Oudrari, H.; Wang, Z.; Wu, A. Assessment of S-NPP VIIRS On-Orbit Radiometric Calibration and Performance. Remote Sens. 2016, 8, 84. [Google Scholar] [PubMed] [Green Version]
- Kouyama, T.; Kato, S.; Miyashita, N. One-year lunar calibration result of Hodoyoshi-1, Moon as an ideal target for small satellite radiometric calibration. In Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 4–9 August 2018. [Google Scholar]
- Wu, R.H.; Zhang, P.; Yang, Z.D.; Hu, X.Q.; Ding, L.; Chen, L. Monitor the radiance calibration of the remotesensing instrument by using the reflected lunar irradiance. J. Remote Sens. 2016, 20, 278–289. [Google Scholar]
- Miller, S.D.; Turner, R.E. A dynamic lunar spectral irradiance data set for NPOESS/VIIRS day/night band nighttime environmental applications. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2316–2329. [Google Scholar]
- Hillier, J.K.; Buratti, B.J.; Hill, K. Multispectral photometry of the Moon and absolute calibration of the Clementine UV/Vis camera. Icarus 1999, 141, 205–225. [Google Scholar]
- Besse, S.; Sunshine, J.; Staid, M.; Boardman, J.; Pieters, C.; Guasqui, P.; Malaret, E.; McLaughlin, S.; Yokota, Y.; Li, J.-Y. A visible and near-infrared photometric correction for Moon Mineralogy Mapper (M3). Icarus 2013, 222, 229–242. [Google Scholar]
- Yokota, Y.; Matsunaga, T.; Ohtake, M.; Haruyama, J.; Nakamura, R.; Yamamoto, S.; Ogawa, Y.; Morota, T.; Honda, C.; Saiki, K.; et al. Lunar photometric properties at wavelengths 0.5–1.6 μm acquired by SELENE Spectral Profiler and their dependency on local albedo and latitudinal zones. Icarus 2011, 215, 639–660. [Google Scholar]
- Wu, Y.; Besse, S.; Li, J.Y.; Combe, J.P.; Wang, Z.; Zhou, X.; Wang, C. Photometric correction and in-flight calibration of Chang’E-1 Interference Imaging Spectrometer (IIM) data. Icarus 2013, 222, 283–295. [Google Scholar]
- Guo, H.; Ye, H.; Liu, G.; Dou, C.; Huang, J. Error analysis of exterior orientation elements on geolocation for a Moon-based Earth observation optical sensor. Int. J. Digit. Earth 2018, 13, 374–392. [Google Scholar]
- Li, T.; Guo, H.; Zhang, L.; Nie, C.; Liao, J.; Liu, G. Simulation of Moon-based Earth observation optical image processing methods for global change study. Front. Earth Sci. 2020, 14, 236–250. [Google Scholar]
- Robinson, M.S.; Brylow, S.M.; Tschimmel, M.; Humm, D.; Lawrence, S.J.; Thomas, P.C.; Denevi, B.W.; Bowman-Cisneros, E.; Zerr, J.; Ravine, M.A.; et al. Lunar reconnaissance orbiter camera (LROC) instrument overview. Space Sci. Rev. 2010, 150, 81–124. [Google Scholar]
- Sato, H.; Robinson, M.S.; Hapke, B.; Denevi, B.W.; Boyd, A.K. Resolved Hapke parameter maps of the Moon. J. Geophys. Res. Planets 2014, 119, 1775–1805. [Google Scholar] [CrossRef]
- Boyd, A.K.; Robinson, M.S.; Sato, H. Lunar Reconnaissance Orbiter wide angle camera photometry: An empirical solution. In Proceedings of the Lunar and Planetary Science Conference, The Woodlands, TX, USA, 19–23 March 2012. [Google Scholar]
- Cahalan, R.F.; Ajiquichí, P.; Yatáz, G. Solar Temperature Variations Computed from SORCE SIM Irradiances Observed During 2003–2020. Sol. Phys. 2022, 297, 1–37. [Google Scholar] [CrossRef]
- Hapke, B. Theory of Reflectance and Emittance Spectroscopy; Cambridge University Press: New York, NY, USA, 2012. [Google Scholar]
- Hapke, B. Bidirectional Reflectance Spectroscopy: 1. Theory. J. Geophys. Res. 1981, 86, 3039–3054. [Google Scholar] [CrossRef] [Green Version]
- Hapke, B. Scattering and diffraction of light by particles in planetary regoliths. J. Quant. Spectrosc. Radiat. Transf. 1999, 61, 565–581. [Google Scholar] [CrossRef]
- Guo, H.; Dou, C.; Chen, H.; Liu, J.; Fu, B.; Li, X.; Zou, Z.; Liang, D. SDGSAT-1: The world’s first scientific satellite for sustainable development goals. Sci. Bull. 2022, 68, 34–38. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Coordinates of Ground Observation Station | Coordinates of the Sun | ||||
|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | |
| 1 February 2019 | 395,639,321.307 | 38,266,042.153 | −15,849,967.443 | −99,334,958,891.534 | −108,485,879,852.694 | −1,171,442,964.620 |
| 2 February 2019 | 399,640,093.024 | 30,777,392.101 | −6,563,094.663 | −11,9974,203,729.788 | −85,057,374,185.770 | −1,231,368,074.096 |
| 3 February 2019 | 402,685,070.881 | 22,136,782.712 | 3,300,020.343 | −135,216,339,462.342 | −57,802,203,851.536 | −1,288,816,108.819 |
| 4 February 2019 | 404,693,614.330 | 12,731,899.257 | 13,281,732.483 | −144,374,909,882.550 | −27,942,575,832.102 | −1,344,004,947.971 |
| 5 February 2019 | 405,640,480.936 | 2,928,981.481 | 22,929,598.868 | −147,036,292,818.152 | 3,181,752,374.513 | −1,397,161,309.976 |
| 6 February 2019 | 405,541,552.787 | −6,930,590.156 | 31,810,331.329 | −143,078,435,155.000 | 34,173,595,168.771 | −1,448,580,728.712 |
| 7 February 2019 | 404,440,889.456 | −16,525,313.441 | 39,523,064.133 | −132,676,493,008.997 | 63,641,084,625.959 | −1,498,682,229.099 |
| 8 February 2019 | 402,402,105.046 | −25,543,546.654 | 45,711,628.386 | −116,295,112,933.068 | 90,260,214,900.542 | −1,548,047,213.407 |
| 9 February 2019 | 399,505,457.430 | −33,672,735.027 | 50,075,703.091 | −94,667,693,940.652 | 112,834,367,682.262 | −1,597,433,863.658 |
| 10 February 2019 | 395,850,181.233 | −40,592,333.726 | 52,381,084.201 | −68,763,558,072.833 | 130,348,136,839.307 | −1,647,761,867.411 |
| 11 February 2019 | 391,559,903.599 | −45,974,249.023 | 52,469,735.772 | −39,744,503,333.340 | 142,013,026,479.114 | −1,700,064,966.986 |
| 12 February 2019 | 386,787,918.572 | −49,493,363.868 | 50,270,509.901 | −8,912,690,818.860 | 147,302,963,299.864 | −1,755,411,786.303 |
| 13 February 2019 | 381,719,057.508 | −50,849,055.971 | 45,811,310.726 | 22,347,792,041.978 | 145,978,021,923.941 | −1,814,797,129.357 |
| 14 February 2019 | 376,566,083.558 | −49,796,904.064 | 39,232,712.489 | 52,633,065,902.452 | 138,095,292,018.467 | −1,879,008,847.484 |
| 15 February 2019 | 371,560,773.505 | −46,188,109.262 | 30,801,448.213 | 80,582,499,483.860 | 124,006,394,512.285 | −1,948,480,187.702 |
| 16 February 2019 | 366,942,382.327 | −40,012,367.109 | 20,919,690.691 | 104,939,820,676.515 | 104,341,757,089.059 | −2,023,149,071.275 |
| 17 February 2019 | 362,947,605.099 | −31,437,617.178 | 10,123,197.305 | 124,609,551,347.494 | 79,982,360,586.191 | −2,102,357,053.840 |
| 18 February 2019 | 359,804,790.386 | −20,837,224.395 | −940,149.502 | 138,706,228,121.825 | 52,020,241,616.223 | −2,184,840,665.057 |
| 19 February 2019 | 357,730,461.395 | −8,793,065.875 | −11,557,451.723 | 146,594,202,092.887 | 21,709,548,884.399 | −2,268,854,787.204 |
| 20 February 2019 | 356,920,641.971 | 3,935,406.505 | −21,021,437.531 | 147,916,241,856.587 | −9,589,629,379.677 | −2,352,435,667.788 |
| 21 February 2019 | 357,528,505.274 | 16,478,337.064 | −28,710,924.878 | 142,609,676,191.742 | −40,472,151,539.559 | −2,433,736,968.225 |
| 22 February 2019 | 359,627,293.264 | 27,949,141.862 | −34,159,777.298 | 130,909,369,199.958 | −69,550,729,352.054 | −2,511,328,325.223 |
| 23 February 2019 | 363,169,664.415 | 37,545,333.070 | −37,096,038.251 | 113,337,395,800.903 | −95,518,093,425.997 | −2,584,351,169.953 |
| 24 February 2019 | 367,961,943.748 | 44,635,701.859 | −37,445,541.630 | 90,679,860,686.103 | −117,205,674,881.443 | −2,652,508,169.417 |
| 25 February 2019 | 373,667,897.489 | 48,819,362.226 | −35,307,649.051 | 63,951,866,322.691 | −133,636,184,478.287 | −2,715,928,989.419 |
| 26 February 2019 | 379,844,747.389 | 49,950,975.964 | −30,917,152.876 | 34,352,166,533.880 | −144,067,710,609.959 | −2,774,991,214.582 |
| 27 February 2019 | 386,002,345.951 | 48,133,405.680 | −24,604,863.636 | 3,209,512,005.569 | −148,027,322,897.020 | −2,830,157,031.899 |
| 28 February 2019 | 391,670,335.457 | 43,683,136.367 | −16,764,082.161 | −28,076,922,033.176 | −145,332,636,386.792 | −2,881,855,373.510 |
| 1 March 2019 | 396,458,241.465 | 37,076,022.056 | −7,825,065.961 | −58,100,360,361.126 | −136,100,336,125.527 | −2,930,415,269.263 |
| Index | Specifications |
|---|---|
| Swath width | 300 km |
| Bands | Deep blue 1: 374–427 nm |
| Deep blue 2: 410–467 nm | |
| Blue: 457–529 nm | |
| Green: 520–587 nm | |
| Red: 618–696 nm | |
| Near infrared (NIR): 744–813 nm | |
| Red edge: 798–911 nm | |
| Spatial resolution Designed radiometric accuracy | 10 m |
| Relative: ≤2% | |
| Absolute: ≤5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, Y.; Renyang, Q.; Tang, T.; Zhang, H.; Ping, J.; Meng, Z.; Li, W.; Gao, H. Simulation Study of the Lunar Spectral Irradiances and the Earth-Based Moon Observation Geometry. Atmosphere 2023, 14, 1212. https://doi.org/10.3390/atmos14081212
Lian Y, Renyang Q, Tang T, Zhang H, Ping J, Meng Z, Li W, Gao H. Simulation Study of the Lunar Spectral Irradiances and the Earth-Based Moon Observation Geometry. Atmosphere. 2023; 14(8):1212. https://doi.org/10.3390/atmos14081212
Chicago/Turabian StyleLian, Yi, Qianqian Renyang, Tianqi Tang, Hu Zhang, Jinsong Ping, Zhiguo Meng, Wenxiao Li, and Huichun Gao. 2023. "Simulation Study of the Lunar Spectral Irradiances and the Earth-Based Moon Observation Geometry" Atmosphere 14, no. 8: 1212. https://doi.org/10.3390/atmos14081212
APA StyleLian, Y., Renyang, Q., Tang, T., Zhang, H., Ping, J., Meng, Z., Li, W., & Gao, H. (2023). Simulation Study of the Lunar Spectral Irradiances and the Earth-Based Moon Observation Geometry. Atmosphere, 14(8), 1212. https://doi.org/10.3390/atmos14081212