Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases



Abstract
:1. Introduction
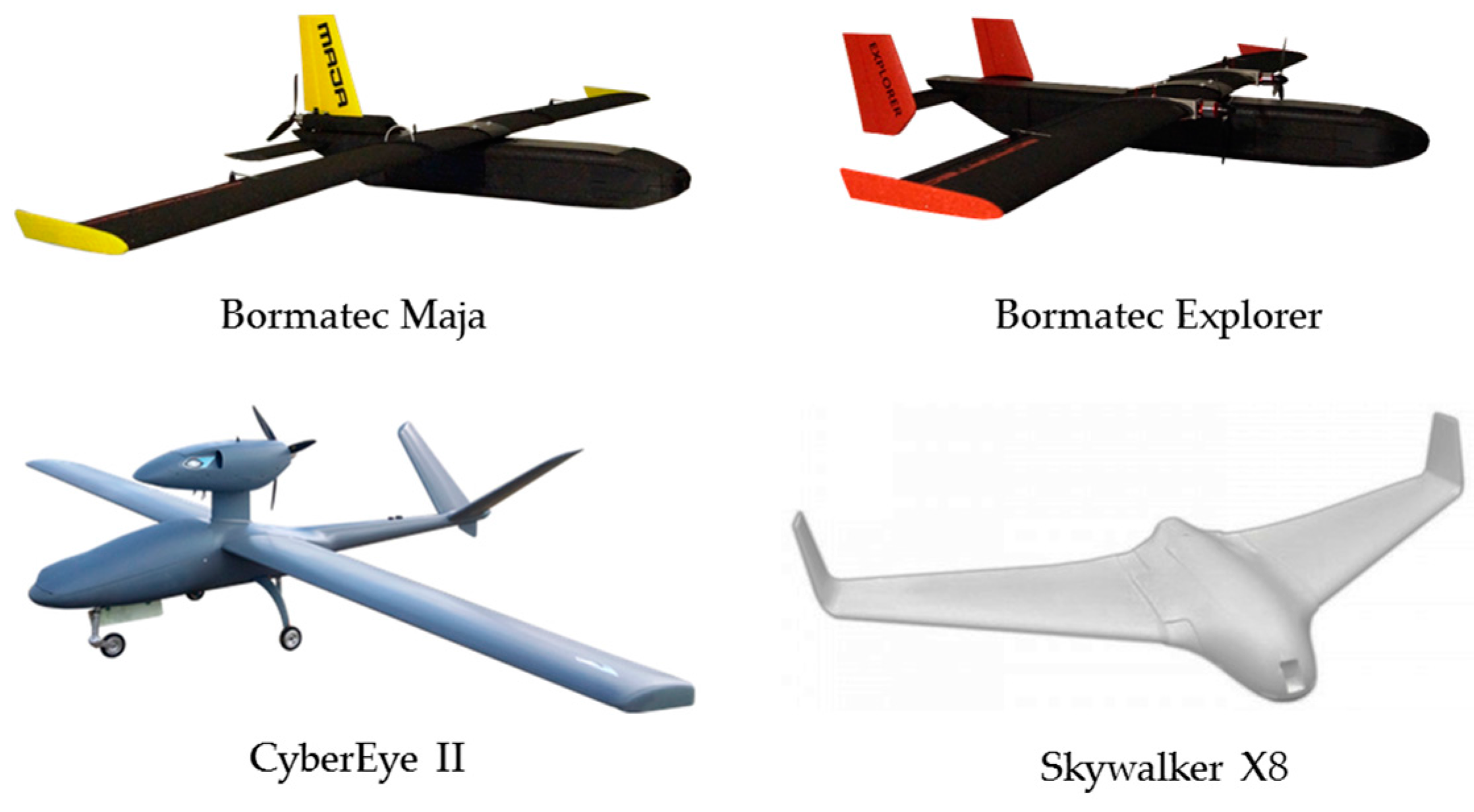
2. Classification of UASs
3. Sensors for Trace Gases
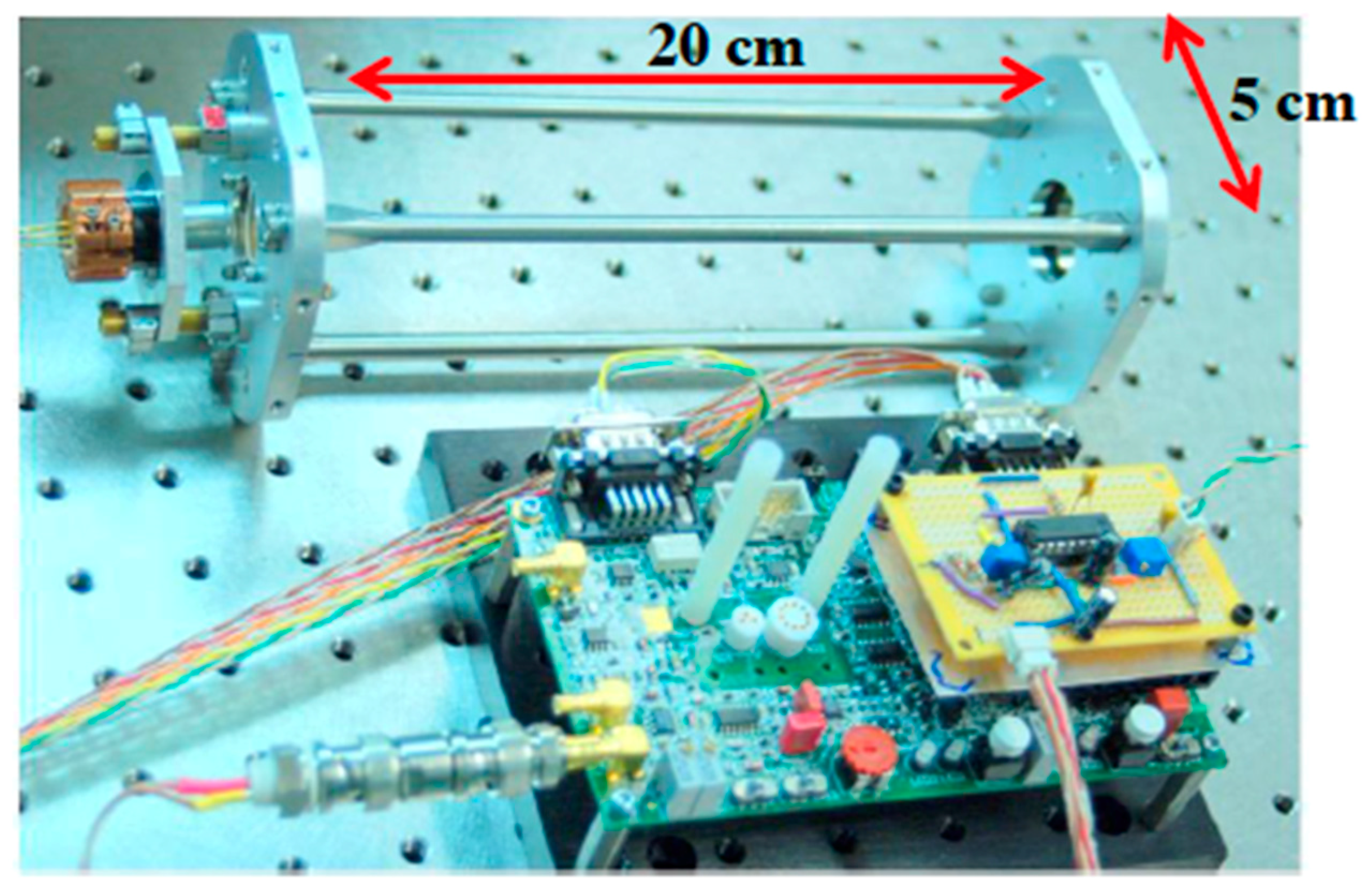
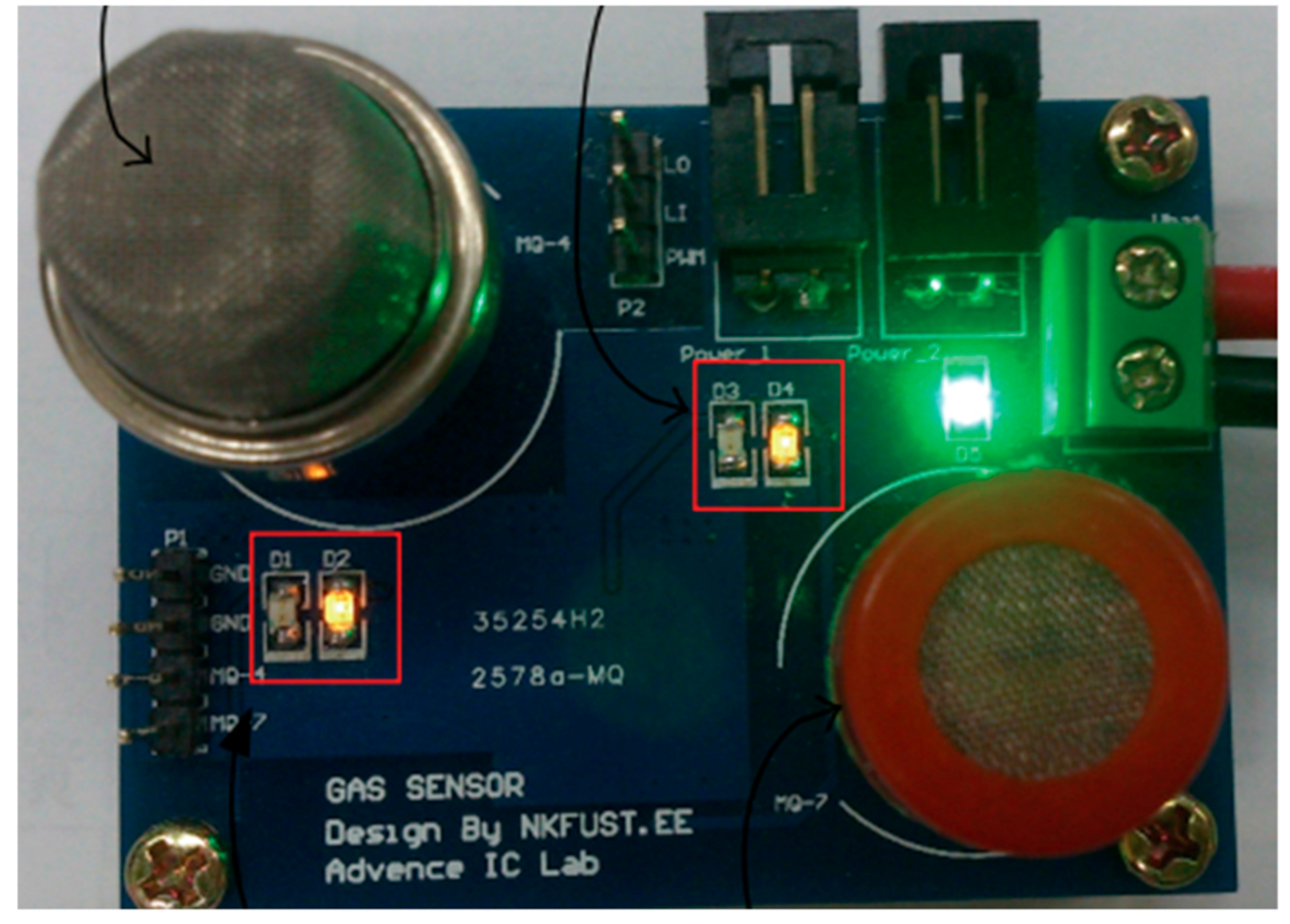
4. Implementation of Sensor Technology Onboard UASs
5. Interface for Integration of Analytical Sensors into UASs and Initial Cost Considerations
6. Restrictions and Regulations in the United States and European Countries
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Seinfeld, J.H.; Pandis, S.N. Atmospheric Chemistry and Physics: From Air Pollution to Climate Change, 3rd ed.; Wiley: Hoboken, NJ, USA, 2016; p. 1152. ISBN 1118947401. [Google Scholar]
- Fowler, D.; Pilegaard, K.; Sutton, M.; Ambus, P.; Raivonen, M.; Duyzer, J.; Simpson, D.; Fagerli, H.; Fuzzi, S.; Schjørring, J.K. Atmospheric composition change: Ecosystems–atmosphere interactions. Atmos. Environ. 2009, 43, 5193–5267. [Google Scholar] [CrossRef]
- Xi, X.; Johnson, M.S.; Jeong, S.; Fladeland, M.; Pieri, D.; Diaz, J.A.; Bland, G.L. Constraining the sulfur dioxide degassing flux from Turrialba volcano, Costa Rica using unmanned aerial system measurements. J. Volcanol. Geotherm. Res. 2016, 325, 110–118. [Google Scholar] [CrossRef]
- Robock, A. Volcanic eruptions and climate. Rev. Geophys. 2000, 38, 191–219. [Google Scholar] [CrossRef]
- Rowland, F.; Molina, M.J. Chlorofluoromethanes in the environment. Rev. Geophys. 1975, 13, 1–35. [Google Scholar] [CrossRef]
- NASA. Ozone Hole Watch. Available online: https://ozonewatch.gsfc.nasa.gov/ (accessed on 12 January 2017).
- Illingworth, S.; Allen, G.; Percival, C.; Hollingsworth, P.; Gallagher, M.; Ricketts, H.; Hayes, H.; Ładosz, P.; Crawley, D.; Roberts, G. Measurement of boundary layer ozone concentrations on-board a Skywalker unmanned aerial vehicle. Atmos. Sci. Lett. 2014, 15, 252–258. [Google Scholar] [CrossRef]
- World Health Organization. Preventing Disease Through Healthy Environments. Available online: http://www.who.int/ipcs/features/air_pollution.pdf (accessed on 4 July 2017).
- World Health Organization. Ambient (Outdoor) Air Quality and Health. Available online: http://www.who.int/mediacentre/factsheets/fs313/en/ (accessed on 4 July 2017).
- Chahine, M.T.; Pagano, T.S.; Aumann, H.H.; Atlas, R.; Barnet, C.; Blaisdell, J.; Chen, L.; Divakarla, M.; Fetzer, E.J.; Goldberg, M. AIRS: Improving weather forecasting and providing new data on greenhouse gases. Bull. Am. Meteorol. Soc. 2006, 87, 911–926. [Google Scholar] [CrossRef]
- Clow, J.; Smith, J.C. Using Unmanned Air Systems to Monitor Methane in the Atmosphere. Available online: https://ntrs.nasa.gov/search.jsp?R=20160003620 (accessed on 12 January 2017).
- Wainner, R.T.; Frish, M.B.; Green, B.D.; Laderer, M.C.; Allen, M.G.; Morency, J.R. High Altitude Aerial Natural Gas Leak Detection System. Available online: https://www.osti.gov/scitech/biblio/921001 (accessed on 14 January 2017).
- Heard, D. Analytical Techniques for Atmospheric Measurement; Blackwell Publishing Ltd.: Oxford, UK, 2006; p. 528. ISBN 978-140-512-357-0. [Google Scholar]
- Crosson, E. A cavity ring-down analyzer for measuring atmospheric levels of methane, carbon dioxide, and water vapor. Appl. Phys. B 2008, 92, 403–408. [Google Scholar] [CrossRef]
- Brady, J.M.; Stokes, M.D.; Bonnardel, J.; Bertram, T.H. Characterization of a Quadrotor Unmanned Aircraft System for Aerosol-Particle-Concentration Measurements. Environ. Sci. Technol. 2016, 50, 1376–1383. [Google Scholar] [CrossRef] [PubMed]
- Renard, J.-B.; Dulac, F.; Berthet, G.; Lurton, T.; Vignelle, D.; Jégou, F.; Tonnelier, T.; Thaury, C.; Jeannot, M.; Couté, B. LOAC: A small aerosol optical counter/sizer for ground-based and balloon measurements of the size distribution and nature of atmospheric particles—Part 2: First results from balloon and unmanned aerial vehicle flights. Atmos. Meas. Tech. Discuss. 2015, 8, 1261–1299. [Google Scholar] [CrossRef]
- Renard, J.-B.; Dulac, F.; Berthet, G.; Lurton, T.; Vignelles, D.; Jégou, F.; Tonnelier, T.; Jeannot, M.; Couté, B.; Akiki, R. LOAC: A small aerosol optical counter/sizer for ground-based and balloon measurements of the size distribution and nature of atmospheric particles—Part 1: Principle of measurements and instrument evaluation. Atmos. Meas. Tech. 2016, 9, 1721–1742. [Google Scholar] [CrossRef] [Green Version]
- Leoni, C.; Hovorka, J.; Dočekalová, V.; Cajthaml, T.S.; Marvanová, S.A. Source Impact Determination using Airborne and Ground Measurements of Industrial Plumes. Environ. Sci. Technol. 2016, 50, 9881–9888. [Google Scholar] [CrossRef] [PubMed]
- Axisa, D.; DeFelice, T.P. Modern and prospective technologies for weather modification activities: A look at integrating unmanned aircraft systems. Atmos. Res. 2016, 178, 114–124. [Google Scholar] [CrossRef]
- Rango, A.; Laliberte, A.; Herrick, J.E.; Winters, C.; Havstad, K.; Steele, C.; Browning, D. Unmanned aerial vehicle-based remote sensing for rangeland assessment, monitoring, and management. J. Appl. Remote Sens. 2009, 3, 33515–33542. [Google Scholar] [CrossRef]
- National Purchase Diary. Year-Over-Year Drone Revenue Soars, According to NPD. Available online: https://www.npd.com/wps/portal/npd/us/news/press-releases/2016/year-over-year-drone-revenue-soars-according-to-npd/ (accessed on 20 January 2017).
- Bretschneider, T.R.; Shetti, K. UAV-based gas pipeline leak detection. In Proceedings of the Asian Conference on Remote Sensing, Nay Pyi Taw, Myanmar, 27–31 October 2014; Available online: http://www.a-a-r-s.org/acrs/index.php/acrs/acrs-overview/proceedings-1?view=publication&task=show&id=1605 (accessed on 14 January 2017).
- Federal Aviation Administration. Operation and Certification of Small Unmanned Aerial Vehicles. Available online: https://www.federalregister.gov/documents/2016/06/28/2016-15079/operation-and-certification-of-small-unmanned-aircraft-systems (accessed on 2 June 2017).
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Rossi, M.; Brunelli, D.; Adami, A.; Lorenzelli, L.; Menna, F.; Remondino, F. Gas-Drone: Portable gas sensing system on UAVs for gas leakage localization. In Proceedings of the IEEE SENSORS 2014, Valencia, Spain, 2–5 November 2014; pp. 1431–1434. Available online: http://ieeexplore.ieee.org/document/6985282/ (accessed on 21 January 2017).
- UAS Task Force. Unmanned Aircraft System Airspace Integration Plan. Available online: http://www.acq.osd.mil/sts/docs/DoD_UAS_Airspace_Integ_Plan_v2_(signed).pdf (accessed on 13 June 2017).
- Environmental Protection Agency. Air Sensor Guidebook. Available online: https://cfpub.epa.gov/si/si_public_file_download.cfm?p_download_id=519616 (accessed on 20 September 2017).
- Thibault, S.E.; Holman, D.; Trapani, G.; Garcia, S. CFD Simulation of a Quad-Rotor UAV with Rotors in Motion Explicitly Modeled Using an LBM Approach with Adaptive Refinement. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; p. 0583. [Google Scholar]
- Yoon, S.; Lee, H.C.; Pulliam, T.H. Computational Analysis of Multi-Rotor Flows. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Poyi, G.T.; Wu, M.H.; Bousbaine, A. Computational fluid dynamics model of a quad-rotor helicopter for dynamic analysis. IJREAT Int. J. Res. Eng. Adv. Technol. 2016, 4, 32–41. [Google Scholar]
- Roldán, J.J.; Joossen, G.; Sanz, D.; del Cerro, J.; Barrientos, A. Mini-UAV based sensory system for measuring environmental variables in greenhouses. Sensors 2015, 15, 3334–3350. [Google Scholar]
- Rajeshwar, K.; Ibanez, J.G. Enivronmental Electrochemistry: Fundamentals and Applications in Pollution Abatement; Academic Press, Inc.: San Diego, CA, USA, 1997; p. 776. ISBN 978-012-576-260-1. [Google Scholar]
- Cross, E.S.; Lewis, D.K.; Williams, L.R.; Magoon, G.R.; Kaminsky, M.L.; Worsnop, D.R.; Jayne, J.T. Use of electrochemical sensors for measurement of air pollution: Correcting interference response and validating measurements. Atmos. Meas. Tech. Discuss. 2017, 2017, 1–17. [Google Scholar] [CrossRef]
- Spinelle, L.; Gerboles, M.; Kok, G.; Persijn, S.; Sauerwald, T. Review of Portable and Low-Cost Sensors for the Ambient Air Monitoring of Benzene and Other Volatile Organic Compounds. Sensors 2017, 17, 1520. [Google Scholar] [CrossRef] [PubMed]
- Werle, P.; Slemr, F.; Maurer, K.; Kormann, R.; Mücke, R.; Jänker, B. Near-and mid-infrared laser-optical sensors for gas analysis. In Proceedings of the SPIE—Diode Lasers and Applications in Atmospheric Sensing, Seattle, WA, USA, 24 September 2002; pp. 101–114. Available online: http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=1314311 (accessed on 21 January 2017).
- Fanchenko, S.; Baranov, A.; Savkin, A.; Sleptsov, V. LED-based NDIR natural gas analyzer. In IOP Conference Series: Materials Science and Engineering, Mykonos, Greece, 27–30 September 2015; IOP Publishing: Bristol, UK; Available online: http://iopscience.iop.org/article/10.1088/1757-899X/108/1/012036 (accessed on 10 February 2017).
- Moseley, P.T. Progress in the development of semiconducting metal oxide gas sensors: A review. Meas. Sci. Tech. 2017, 28, 82001–82016. [Google Scholar] [CrossRef]
- Karpov, E.Е.; Karpov, Е.F.; Suchkov, А.; Mironov, S.; Baranov, A.; Sleptsov, V.; Calliari, L. Energy efficient planar catalytic sensor for methane measurement. Sens. Actuators A Phys. 2013, 194, 176–180. [Google Scholar] [CrossRef]
- Khan, A.; Schaefer, D.; Tao, L.; Miller, D.J.; Sun, K.; Zondlo, M.A.; Harrison, W.A.; Roscoe, B.; Lary, D.J. Low power greenhouse gas sensors for unmanned aerial vehicles. Remote Sens. 2012, 4, 1355–1368. [Google Scholar] [CrossRef]
- So, S.; Sani, A.A.; Zhong, L.; Tittel, F.; Wysocki, G. Laser spectroscopic trace-gas sensor networks for atmospheric monitoring applications. In Proceedings of the ESSA Workshop, San Francisco, CA, USA, 16 April 2009; Available online: http://www.ruf.rice.edu/~mobile/publications/so09essa.pdf (accessed on 17 January 2017).
- Chen, M.-C.; Chen, C.-H.; Huang, M.-S.; Ciou, J.-Y.; Zhang, G.-T. Design of unmanned vehicle system for disaster detection. Int. J. Distrib. Sens. Netw. 2015, 784298–784306. [Google Scholar] [CrossRef]
- Hanwei Electronics. Specification Document for MQ-4 Gas Sensor. Available online: https://www.sparkfun.com/datasheets/Sensors/Biometric/MQ-4.pdf (accessed on 12 December 2016).
- Allen, G.; Gallagher, M.; Hollingsworth, P.; Illingworth, S.; Kabbabe, K.P.C. Feasibility of Aerial Measurements of Methane Emissions from Landfills. Available online: https://www.gov.uk/government/publications/aerial-measurements-of-methane-emissions-from-landfills (accessed on 12 January 2017).
- Bartholmai, M.; Neumann, P. Micro-Drone for Gas Measurement in Hazardous Scenarios. In Selected Topics in Power Systems and Remote Sensing, Tazikawa, Japan, 4–6 October; WSEAS Press: Cambridge, UK; pp. 149–152. Available online: http://www.wseas.us/e-library/conferences/2010/Japan/POWREM/POWREM-23.pdf (accessed on 2 July 2017).
- Alvear, O.; Zema, N.R.; Natalizio, E.; Calafate, C.T. Using UAV-Based Systems to Monitor Air Pollution in Areas with Poor Accessibility. J. Adv. Transp. 2017, 2017, 14. [Google Scholar] [CrossRef]
- Berman, E.S.F.; Fladeland, M.; Liem, J.; Kolyer, R.; Gupta, M. Greenhouse gas analyzer for measurements of carbon dioxide, methane, and water vapor aboard an unmanned aerial vehicle. Sens. Actuators B Chem. 2012, 169, 128–135. [Google Scholar] [CrossRef]
- Everts, S.; Davenport, M. Rise of the Machines. Chem. Eng. News 2016, 84, 32–33. [Google Scholar] [CrossRef]
- Everts, S.; Davenport, M. How Drones Help Us Study Our Climate, Forecast Weather. Chem. Eng. News 2016, 94, 34–36. [Google Scholar]
- Everts, S. Drones Detect Threats Such as Chemical Weapons, Volcanic Eruptions. Chem. Eng. News 2016, 94, 36–37. [Google Scholar]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and Integration of a Solar Powered Unmanned Aerial Vehicle and a Wireless Sensor Network to Monitor Greenhouse Gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N.; et al. Near-Field Characterization of Methane Emission Variability from a Compressor Station Using a Model Aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef] [PubMed]
- Selker, J.; Tyler, S.; Higgins, C.; Wing, M. Drone Squadron to Take Earth Monitoring to New Heights. EOS 2015, 96, 8–11. [Google Scholar] [CrossRef]
- Hurley, B. Report from SPIE 2017: Drones Spot Gas Leaks from the Sky. Available online: http://www.techbriefs.com/component/content/article/1198-ntb/news/news/26735-from-spie-laserbased-sensors-uavs-spot-methane-leaks (accessed on 4 October 2017).
- Knörig, A.; Wettach, R.; Cohen, J. Fritzing: A tool for advancing electronic prototyping for designers. In Proceedings of the 3rd International Conference on Tangible and Embedded Interaction, Regent, UK, 16–18 February 2009; pp. 351–358. Available online: http://dl.acm.org/citation.cfm?id=1517735 (accessed on 12 July 2017).
- Federal Aviation Administration. Operation and Certification of Small Unmanned Aircraft Systems. Available online: https://www.faa.gov/uas/media/RIN_2120-AJ60_Clean_Signed.pdf (accessed on 12 September 2017).
- Federal Aviation Administration. List of Commerical Testing Centers in Compliance with Part 107. Available online: https://www.faa.gov/training_testing/testing/media/test_centers.pdf (accessed on 12 September 2017).
- Federal Aviation Administration. sUAS Registration with FAA. Available online: https://registermyuas.faa.gov/ (accessed on 12 September 2017).
- European Aviation Safety Agency. Introduction of a Regulatory Framework for the Operation of Drones (A). Available online: https://www.easa.europa.eu/system/files/dfu/NPA%202017-05%20%28A%29_0.pdf (accessed on 14 September 2017).
- European Aviation Safety Agency. Introduction of a Regulatory Framework for the Operation of Drones (B). Available online: https://www.easa.europa.eu/system/files/dfu/NPA%202017-05%20%28B%29.pdf (accessed on 14 September 2017).
- International Civil Aviation Organization. Current State Regulations of Unmanned Aircraft. Available online: https://www4.icao.int/uastoolkit/Home/BestPractices (accessed on 14 September 2017).
- International Civil Aviation Organization. Civil Aviation Authorites Worldwide. Available online: https://www.icao.int/Pages/Links.aspx (accessed on 14 September 2017).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trace Atmospheric Gas of Interest | Useful Detection Limit | Expected Range |
|---|---|---|
| Ozone | 10 ppbv | 0–150 ppbv |
| Carbon monoxide | 100 ppbv | 0–300 ppbv |
| Carbon dioxide | 100 ppmv | 350–600 ppmv |
| Nitrogen dioxide | 10 ppbv | 0–50 ppbv |
| Sulfur dioxide | 10 ppbv | 0–100 ppbv |
| Methane | 500 ppbv | 1500–2000 ppbv |
| VOCs | 1 µg m–3 | 5–100 µg m–3 (total) |
| Country | MTOM a Limit | Categories | License | Height Limit |
|---|---|---|---|---|
| Austria | 150 kg | 5 kg; 25 kg | More risky categories with an increase of pilot qualification | 150 m AGL e |
| Belgium | 150 kg | <1 kg recreational; <5 kg class 2; >5 kg class 1 | Yes for Class 1 (including LAPL medical); Class 2: practical examination with certificate (no medical) | 91 m AGL e |
| Czech Republic | 150 kg | 0.91 kg; 7 kg; 20 kg | UAS for professional use needs authorization. Pilot passes practical and theoretical tests | 300 m AGL e; in CTR 100 m AGL e |
| Denmark | >25 kg need authorization | 1A: <1.5 kg 1B: <7 kg 2: 7–25 kg 3: BVLO c | For commercial use in populated areas, permission is needed. Applicants need have an operations handbook and pass a practical test | 100 m |
| Finland | 25 kg | 7 kg over densely populated areas | No | 150 m |
| France | 150 kg | Captive RPAS d and RPAS <2 kg, <25 kg; and >25 kg | RPAS d >25 kg need a remote-pilot license. For scenario S1, S2, and S3: theoretical certificate, and practical test. For scenario S4: theoretical certificate + manned aviation license. | 150 m; (50 m in scenarios S2, RPAS d >2 kg) |
| Germany | 25 kg | <25 kg; >25 kg | Theoretical and practical requirements above 5 kg. | 100 m |
| Ireland | 150 kg | 1, 5, 7, and 20 kg | No, but theoretical and practical requirements | 120 m for <20 kg |
| Italy | As per basic regulation | 0.3 kg; 2 kg; 25 kg | Yes, pilot certificate for VLOS b and <25 kg, otherwise license. Medical class LAPL/3. | 150 m |
| Lithuania | >25 kg need registration | 1. <300 g; 2. >300–25 kg; 3. >25 kg | Yes, requirements set up in conditions for conducting commercial flights | 122 m |
| Malta | 150 kg | No | Medical Declaration | 122 m |
| Netherlands | 150 kg | No | Yes | 120 m |
| Poland | 150 kg | 25 kg | Certificate of qualification, including medical for commercial pilots | |
| Portugal | >25 kg need authorization; toy <1 kg | Toy <1 kg; >25 kg with authorization | Case by case, >25 kg | 120 m; toy 30 m outside controlled airspace |
| Slovenia | 150 kg | No | Yes | |
| Spain | 150 kg | <2 kg; <25 kg; and >25 kg | <25 kg theoretical knowledge + practical course on RPAS d + LAPL; >25 kg pilot license | 120 m |
| Sweden | 150 kg | 1A: 0–1.5 kg/max 150 J/VLOS b 1B: 1.5–7 kg/max 1000 J/VLOS 2: 7–150 kg/VLOS b 3: BVLOS c | Yes >7 kg | 120 m |
| Switzerland | 150 kg | Open: <30 kg, 100 m outside crowds VLOS b; Specific: Anything else | Pilot skills in the total hazard and risk assessment (GALLO) | No limit (with GALLO) |
| United Kingdom | 150 kg | <20 kg; >20–150 kg | >20 kg or BVLOSc; <20 kg VLOS b: pilot competency assessment required if requesting permission. | 122 m (>7–20 kg); <7 kg VLOS |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schuyler, T.J.; Guzman, M.I. Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere 2017, 8, 206. https://doi.org/10.3390/atmos8100206
Schuyler TJ, Guzman MI. Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere. 2017; 8(10):206. https://doi.org/10.3390/atmos8100206
Chicago/Turabian StyleSchuyler, Travis J., and Marcelo I. Guzman. 2017. "Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases" Atmosphere 8, no. 10: 206. https://doi.org/10.3390/atmos8100206
APA StyleSchuyler, T. J., & Guzman, M. I. (2017). Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere, 8(10), 206. https://doi.org/10.3390/atmos8100206