5.1. Quadrant Analysis
The quadrant analysis allows for a deeper insight into the dynamical behaviour of the flow, since it groups certain events based on their specific contribution to the total momentum flux, and provides their statistical overview. To be more specific, we obtain information about a particular contribution of the momentum flux
from the particular flux direction (i.e., quadrant) with the quadrant analysis. The definition of the quadrants, derived from the scatter plot of the streamwise and vertical velocity component fluctuations, was inspired by Willmarth and Lu [
40]:
- outward interaction (),
- sweep ().
- inward interaction (),
- ejection (),
The particular contribution of the
i-th quadrant
to the total momentum flux
is obtained from a formula of weighted average:
where
means the time-averaged momentum flux within the i-th quadrant,
is the number of events belonging to the i-th quadrant and
is the global number of events recorded during the time period
and
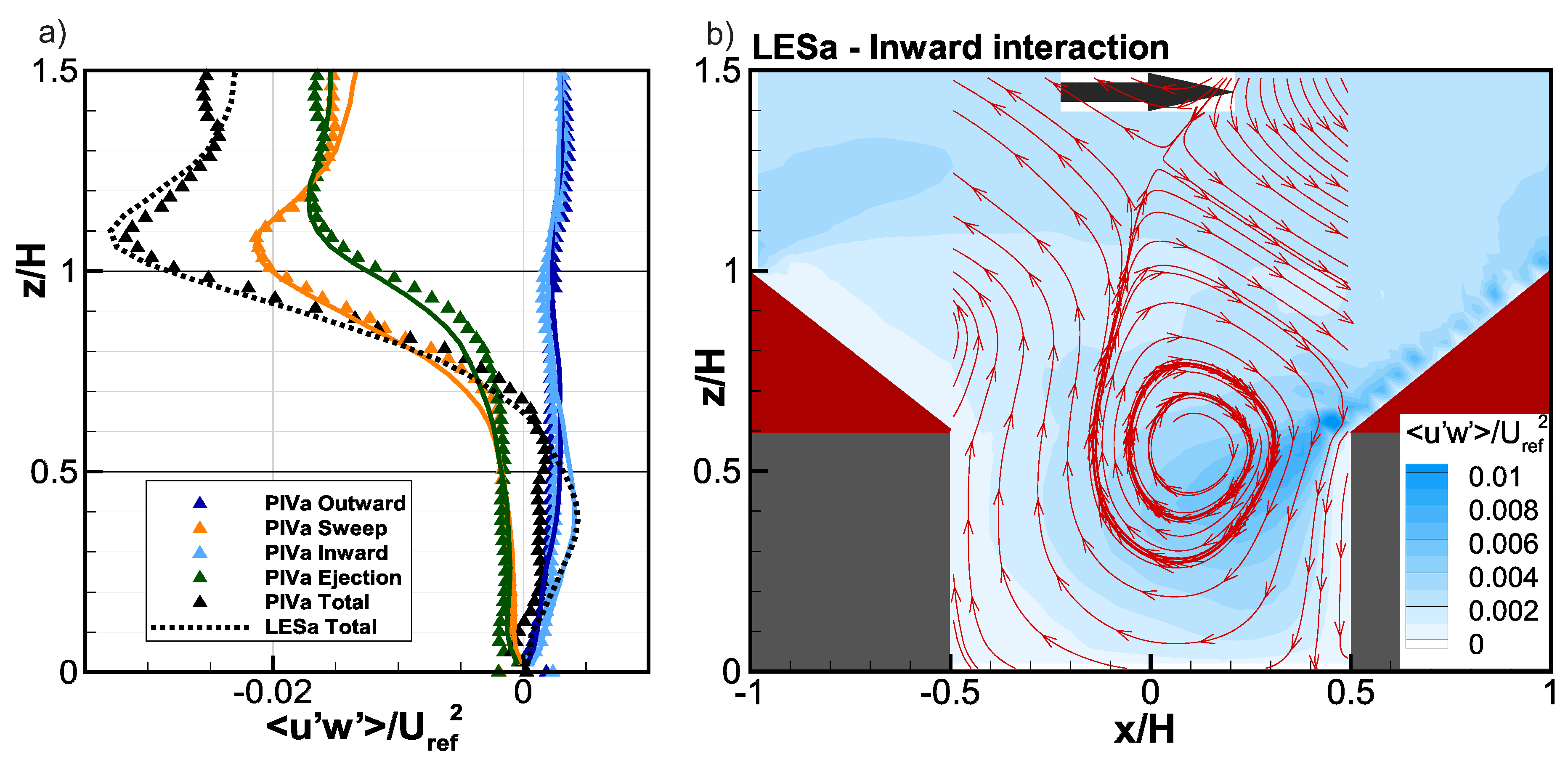
. The vertical profiles of the total momentum flux,
, with each of the event contributions are plotted in
Figure 6a. The total momentum flux is a simple sum of all the contributions.
First, it is worth pointing out that the peak shape (at
) is quite different from the peak shape of the street canyons with the same aspect ratio, but with flat roofs (e.g., [
7,
25,
41]). While the peak of the profile of the total momentum flux is narrow and located just above the roof-top of the street canyons with flat roofs, the pitched roofs generate a vertically more extensive shear layer and consequently produce a stronger exchange between the canyon cavity and the boundary layer aloft (for more details see [
24]).
The quadrant analysis confirms that the sweep events (orange triangles in
Figure 6a) and ejection events (green triangles in
Figure 6a) clearly contribute the most to the total momentum flux, while the inward (light blue triangles in
Figure 6a) and outward (dark blue triangles in
Figure 6a) interactions are negligible. As the contribution of the sweep events is forecasted by LESa (solid lines) extraordinarily well in both the peak elevation and the magnitude above the roof top, the moderate over-estimation of the ejections leads to a slight over-prediction of the total momentum flux at the peak level. Again, the general tendencies of strong sweep and ejection events are predicted extremely well.
The momentum flux exhibits a significant diversion from the measured data in the lower part of the canyon (). The over-prediction by LESa is caused by a strong contribution from the inward interaction quadrant compared to the completely missing inward interaction in the case of PIVa. The LES with a grid resolution of 2 mm is probably unable to resolve the small-scale shear motion properly. The preliminary results from a finer grid resolution of the LES (1 mm) indicates much better agreement (not shown here).
Considering the hypothesis that a model, primarily, has to correctly simulate the momentum flux in order to predict velocity properly [
18], the over-prediction of the inward interaction provides a possible explanation why the LESa fails to correctly predict the mean velocity profiles and 2-D fields, as presented in previous sections in
Figure 2 and
Figure 3.
Figure 6b reveals that the increase of the inward interaction significantly correlates with the flow pattern of the second POD mode calculated from LESa data, indicated by the red streamlines (the details are explained later in
Section 5.3).
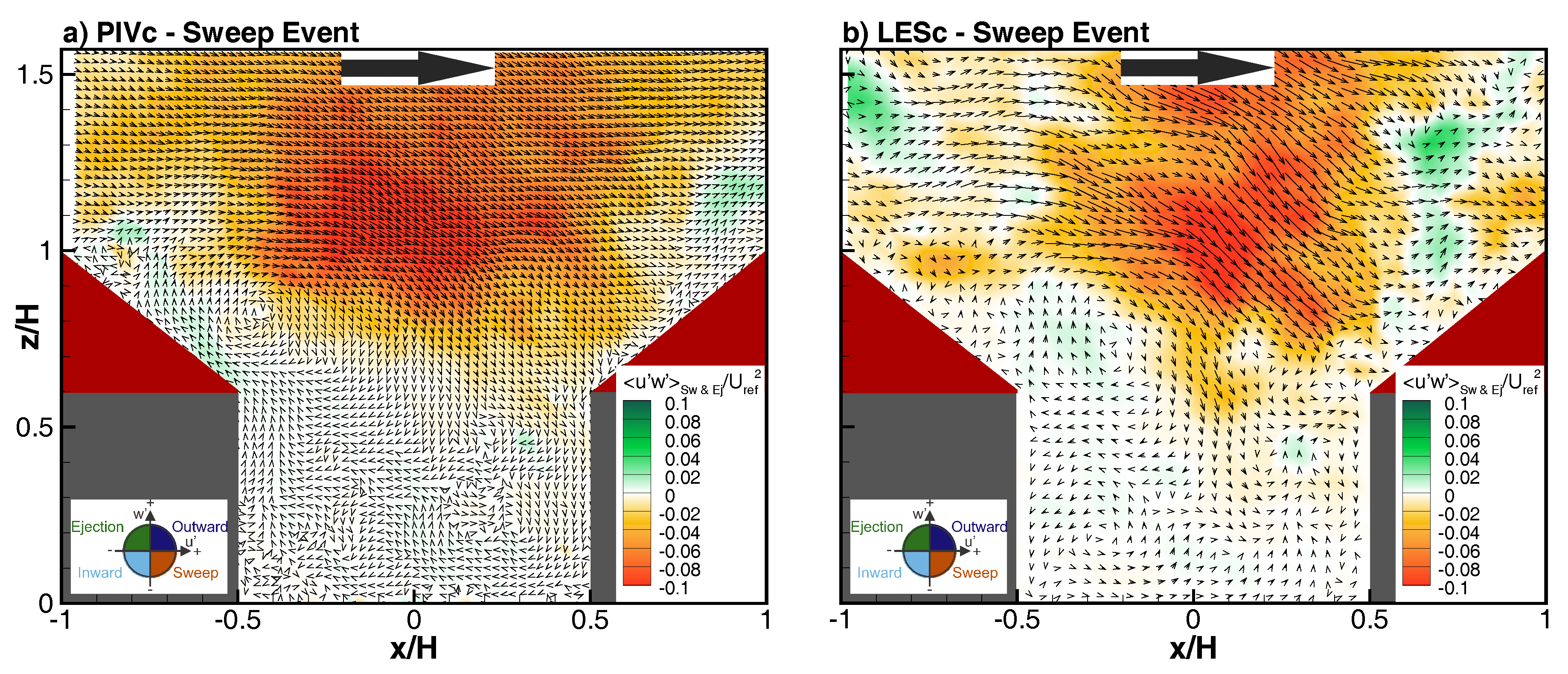
The sweep and ejection events often travel in a compact shape across the street canyon. For a better demonstration of these phenomena, it is convenient to plot their conditionally averaged shape as derived from several strong events. An example of a typical sweep from PIVc and a typical sweep from LESc, in the canyon, is presented in
Figure 7a,b, respectively. The negative (orange) values denote the region where a strong sweep takes place whereas the positive (green) values denote the existence of a dominant ejection. Further, we evaluated the spatial distribution of each quadrant in the planar vector field
by means of a spatially relative cumulative contribution
from particular event
to the total momentum flux
according to the formula:
where
and
are the row and column numbers in the vector field,
representing the absolute values of the inner product. The total momentum flux
in Equation (
11) is the sum of absolute values from each quadrant at each time.
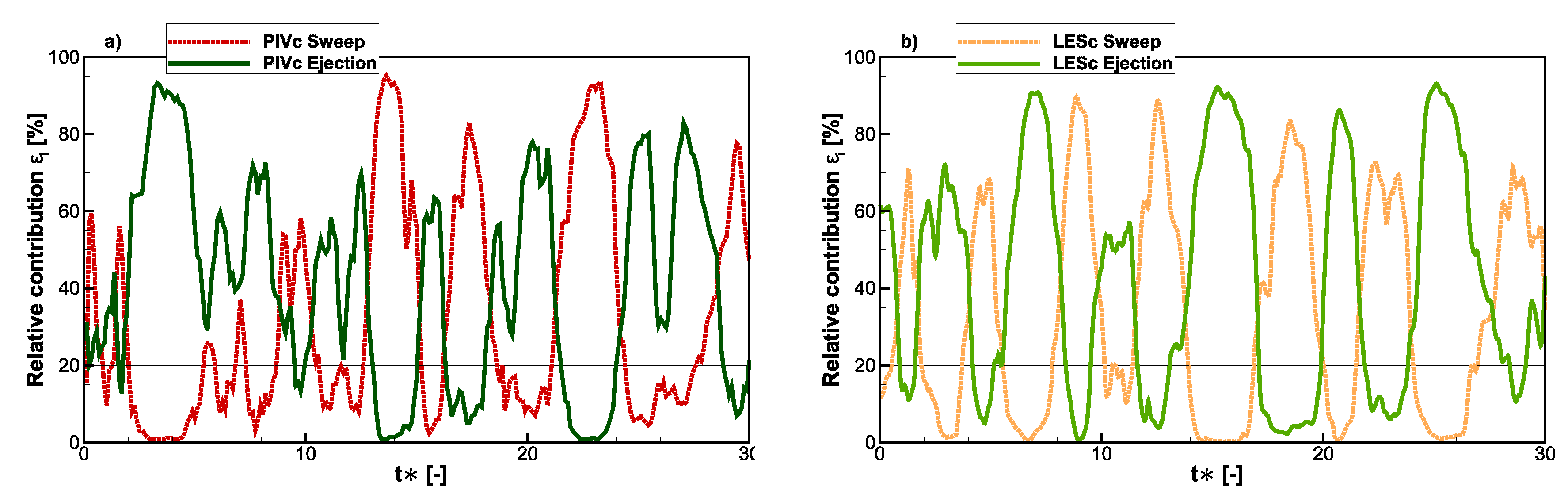
The calculation of the contribution of the particular event
from Equation (
9) revealed that the sweep and ejection events occasionally represent up to
of the total momentum flux (see the red and green lines in
Figure 8). Such a high contribution agrees with the many experimental and numerical studies dealing with the role of sweep and ejection in turbulent boundary layers (e.g., [
40,
42,
43,
44]). The specific time instants with
from the sweep quadrant serve as the data input for the conditional averaging of the momentum flux field in order to achieve a typical intensive sweep event in the canyon as shown in
Figure 7.
The clear tendency for both events to pass the street canyon in an alternating fashion can be seen also in
Figure 8a,b. This is supported by the large and negative value of the correlation coefficient between the relative contributions of sweeps and ejections,
. When the sweep enters the canyon, the ejection is suppressed and vice versa. The frequency of such events occurring was analysed from the time series of their relative contribution
defined by Equation (
9). The mean value derived from all instantaneous values
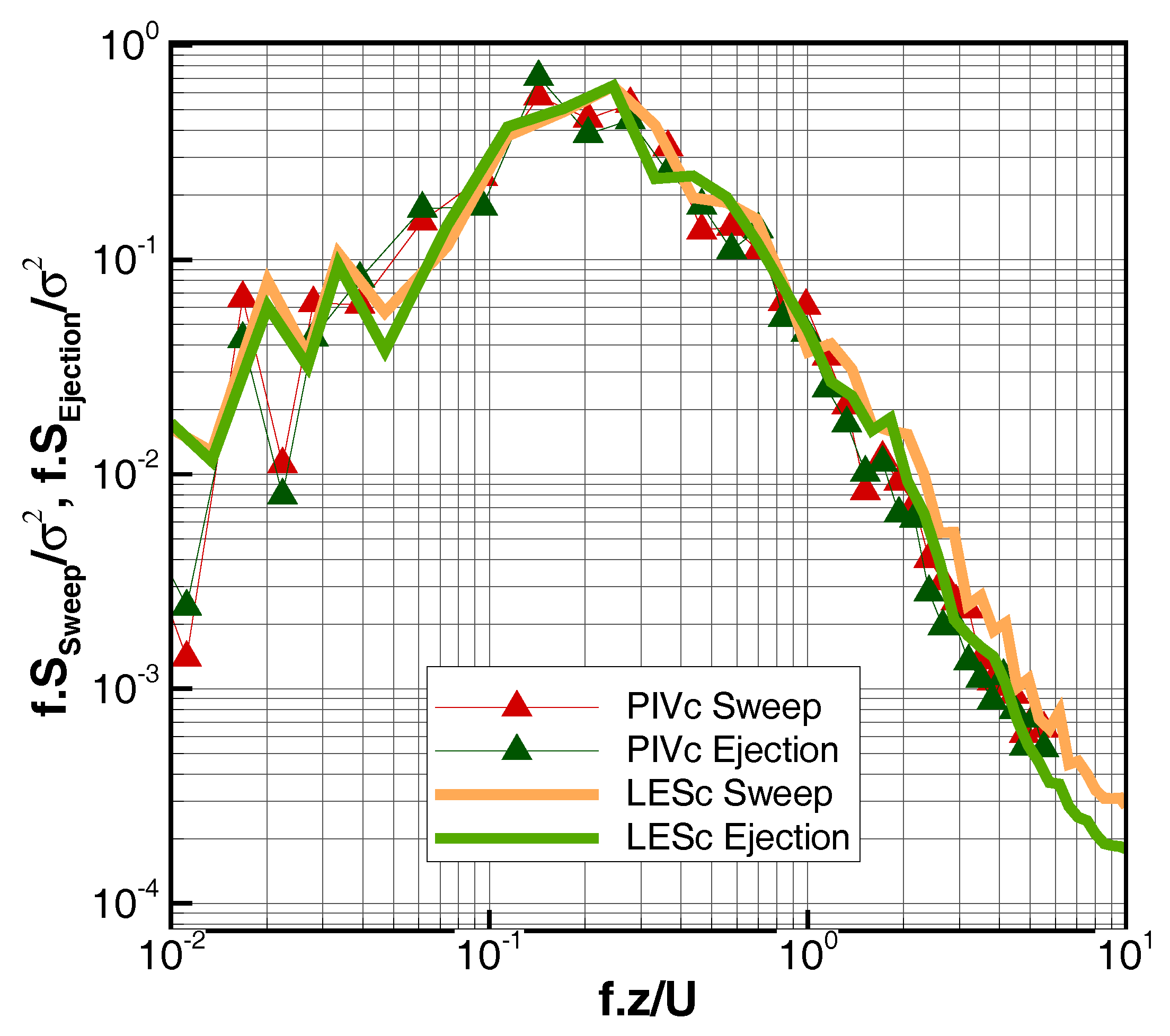
was subtracted from the time series and the spectral function was obtained by the same algorithm used in the case of velocity fluctuations described as in
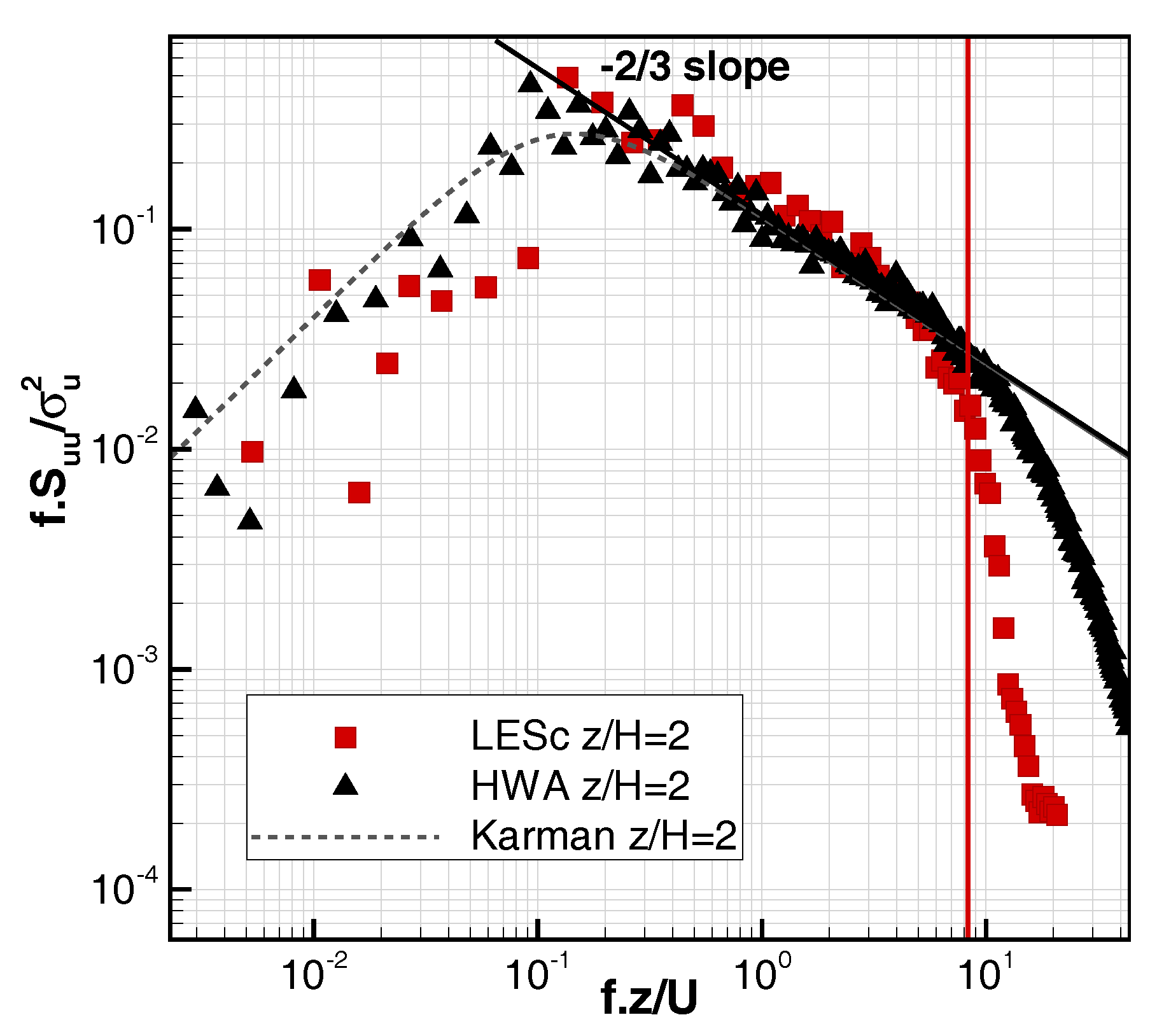
Section 4.4. The spectra revealed that the characteristic frequency of this pseudo-wavy pattern occurs approximately at
, taking into account an estimated convective velocity of the quadrant events [
27] for both the PIVc and the LESc (
Figure 9). The sweep and ejection events pass the canyon or are induced by the canyon geometry with the same pseudo-frequency and with the same relative intensity in both the experiment and the simulation. It is necessary to note that sweep and ejection events are not part of any vortex since their wavelength is larger than either the vertical or lateral dimension of the wind tunnel. In conclusion, the quadrant analysis proves that the LES is capable of reliably modelling large intermittent and organised structures in the flow above the obstacles.
5.2. Spatial Correlation
Spatial correlation helps to explore the link between transient flow dynamics across the field in a statistical sense. The normalised correlation coefficient at the point
, where
is the reference point, was calculated according to formula
where
N is the number of time-steps (snapshots) obtained from the continuous PIVc measurement and LESc simulation, and
is the standard velocity deviation. For both PIVc and LESc vector fields, we calculated the correlation between the time series at the chosen reference point
and all other spatial locations. The correlation coefficients were calculated for velocity fluctuation
and
, and for the momentum flux fluctuation
. Since the spatial quadrant analysis (
Section 5.1) reveals that appreciable regions of high momentum fluxes (i.e., the sweep and ejection events) pass the canyon, we aim to investigate the correlation between the time-series of these momentum fluxes
instead of a simple correlation between the quantity
and
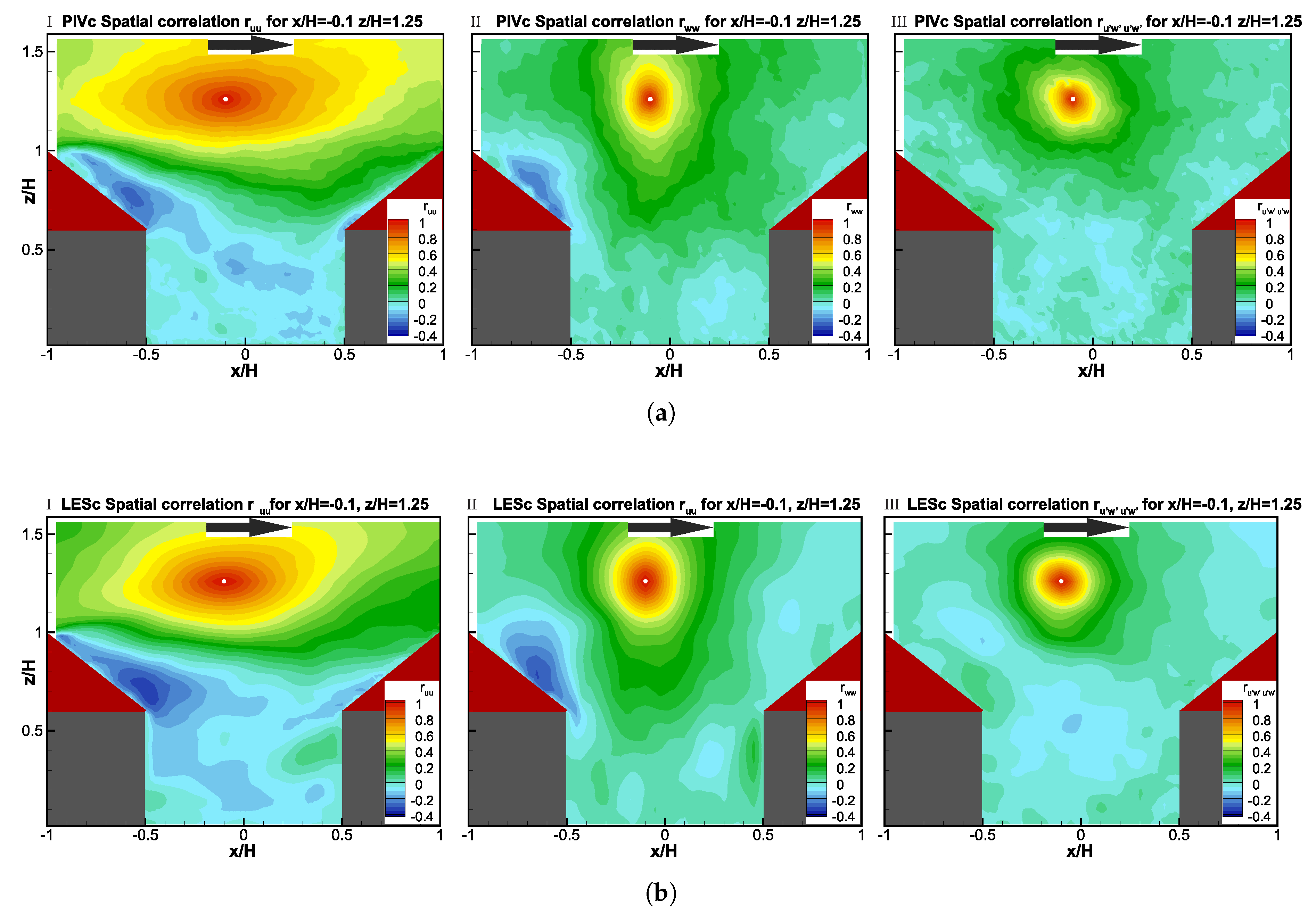
. The contour-plots in
Figure 10 display typical patterns of the spatial correlation above the street canyon similar to the one obtained in, e.g., Michioka et al. [
7]. Regarding the qualitative comparison, the plots confirm a good agreement between the experimental (
Figure 10a) and the numerical (
Figure 10b) results.
The contour-plots allow us to directly compare the correlation coefficient fields from the PIVc and LESc. To express the degree of similarity between the plots in
Figure 10a,b, we calculated the
final correlation coefficient via the following formula
where
is the number of locations
in the measurement area and
or
.
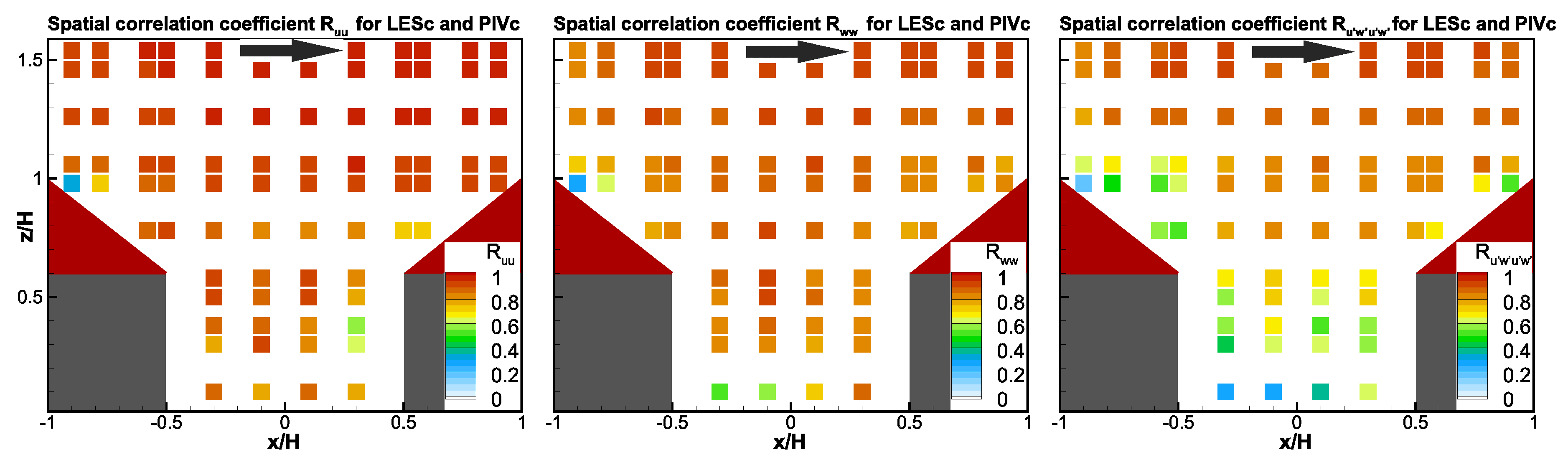
The results of
,
and
obtained for the shared grid points of both PIVc and LESc (together 132 points) are plotted in
Figure 11. The appropriate final correlation coefficient
is presented by means of the coloured scale and is assigned to a specific location (square) within the investigated area.
Figure 11 suggests that the greatest deviation in the LES predictions, compared with the experimental results, is located mainly inside the street canyon, close to the vicinity of the walls and near the canyon bottom, especially in the case of the momentum flux,
. Again, the LESc apparently fails to predict the recirculation zone together with the small-scale structures within the canyon cavity, probably due to the coarseness of the grid resolution. Other lower correlations can be seen in the vicinity of the upstream building roof, where small-vortex shedding occurs. This, in accordance with previous results of the Hit rate validation metric, confirms that the transient dynamics, and consequently the ventilation processes, at these critical areas will not be predicted by the presented LES model in the proper manner.
The range of the mean values of the correlation coefficient that corresponds to the individual canyons, and which is spatially-averaged over the entire investigated area within each canyon (always 132 shared points between the PIV and LES grids) for
u,
w and
, are listed in
Table 6. The relatively high unified values in
Table 6 indicate that the correlation method for a single velocity component
u or
w is rather tolerant in measuring the degree of similarity between the predicted and observed short-time intermittent motions within the shear layer at the canyon bottom. In other words, this spatially-average single number from each canyon will not reveal the subtle differences between the measured and forecasted transient dynamics and will yield a rather high percentage of agreement. We presume that validations based solely on the spatially-averaged correlation of
u and
w would lead to an overestimation of the LES model with respect to the prediction of intermittent motions. However, the detailed picture of locally dependent final correlations, as depicted in
Figure 11, is a suitable tool for the detection of problematic areas in the LES prediction.
5.3. Proper Orthogonal Decomposition
Contrary to a one-point spatial correlation, which simply carries out the statistical behaviour of the fluctuations with respect to one arbitrarily chosen reference point, the POD groups the correlated motions into contextual merit-based ensembles and thus provides a certain insight into the coherent intermittent dynamics [
45]. Simply stated, for fluid mechanic applications, POD assembles the intermittent events together by finding their most appropriate representation (basal vectors). This representation expresses the highest
content in each vector from a statistical point of view. The POD may be applied for both the experimental data (e.g., [
20,
24,
25,
46]) and the data obtained from CFD simulations (e.g., [
47]). Hence, it provides a valuable tool for comparing the results from numerical modelling with those from a physical experiment.
The POD was proposed by Lumley [
48] as a tool for the detection of large coherent structures in the flow. This method is based on the assumption that we can extract special functions (alias basal vectors
) from the chaotic turbulent flow, those which possess the mathematical description of the coherent structures as the most probable flow features. It is thus possible to describe every value of the instantaneous velocity fluctuation at every instant of time and space
by a set of new basal vectors
and their corresponding expansion coefficients
, where
is equal to double the number of grid points
P, as
where
represents the correlation coefficient and
the Kronecker delta achieving value of 1 for
and 0 otherwise.
The basis
meets the orthogonality and normality criteria, so that the vectors
(i.e., POD modes) are perpendicular to each other and are properly normalised. In the case of POD, this basis is not chosen
a priori as in the Fourier or the wavelet analysis, but according to the input data. It is important to note that the POD modes are functions of space, not of time. The
p-
eigenvalue
corresponds to the
p-
POD mode and contains information about the contribution of the
p-
mode to the total turbulent kinetic energy (
). A reordering of the eigenvalues based on the descending
(and the ascending order of
p)
reveals the most dominant modes in the flow according to their relative contribution
to the
[
49]:
We applied the POD to the horizontal and vertical velocity components inside a limited rectangular area of the street canyon. Data from both the LES and PIV were normalised by the reference velocity. Since the number of grid points obtained from PIV post-processing (2400 points) differs from the number of grid points in the LES simulation (1120 points), and also because the slightly different dimensions of the investigated areas (due to the different outer boundaries of the grids) might cause certain differences in the POD results, we tested the sensitivity of the POD to these aspects first. We observed that it is better to keep the dimension of the region identical, irrespective of the differences in spatial resolution. It is also better to interpolate only the POD output, rather than the input data. Thus, every POD mode was calculated for the original grid, and then each LES mode was interpolated to the PIV grid.
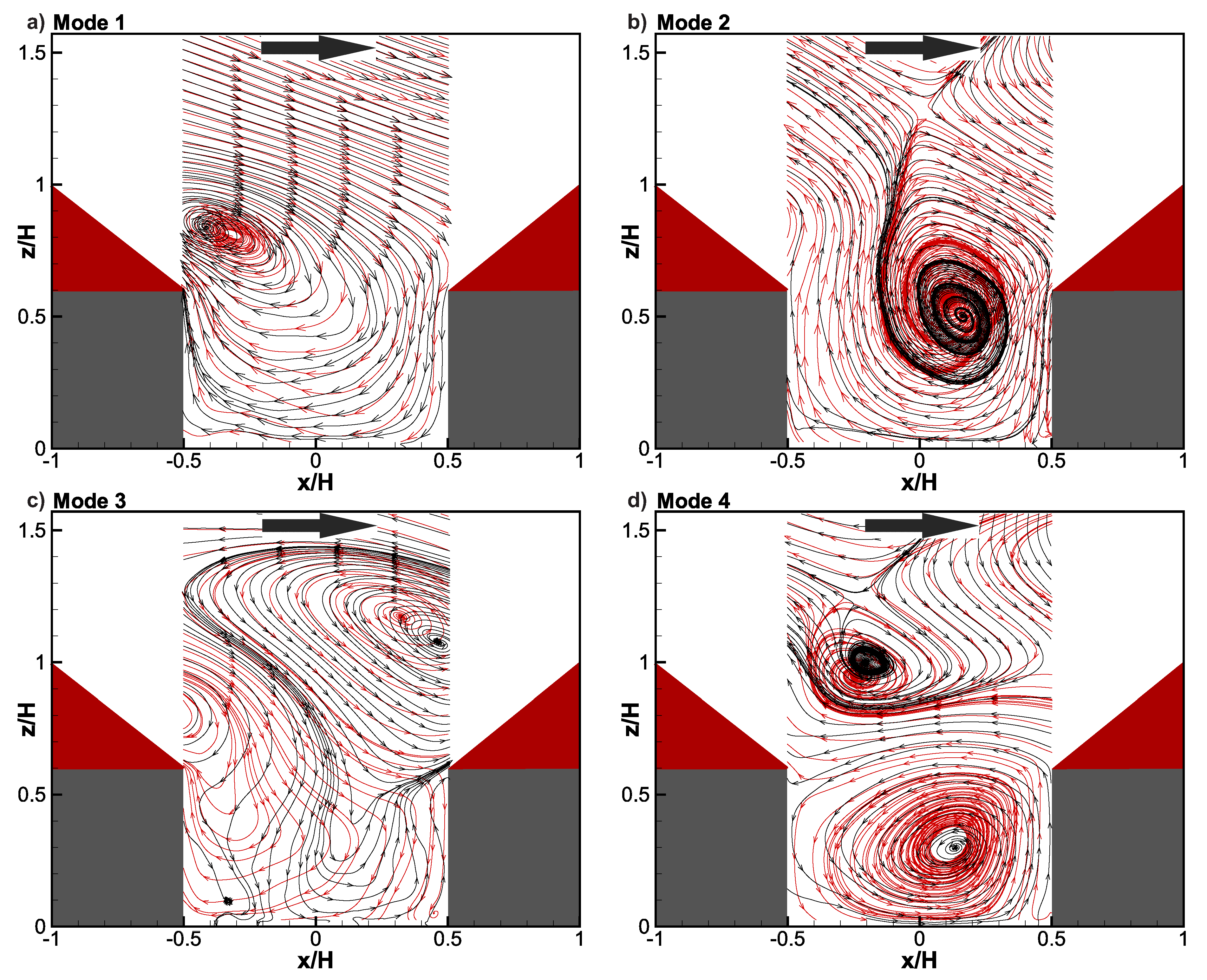
In order to illustrate the spatial distribution of the modes
, the four most dominant POD modes for PIVa and LESa in terms of
are depicted in
Figure 12a–d. It has to be emphasized that the black lines with the arrows, the so-called streamlines, were painted manually, hence their density and precise location serve for display purposes only.
The first mode in
Figure 12a displays the vortex behind the roof, which is well pronounced and dominant in the case of the intermittent flow. Kellnerova et al. [
24] proved that this vortex accurately captures the dominant street-canyon flow dynamics. The LESa version, involving the data from all of the simulated canyons, shows a good agreement with the PIV results with respect to the core of the vortex. This is a very important finding, since the first mode contributes the most (by 32%) to the total turbulent energy budget. The deviation of this roof-vortex core of PIVa from that of LESa (
) can be considered small enough, resulting in an overall consistency of the modal shape and leading to a satisfactory validation.
Regarding the second mode (
Figure 12b), the inflection point at the area above the roof is predicted precisely. The LES seems to push the center of the vortex between the walls. The recirculation vortex, containing 7% of total TKE, is the main dynamical pattern responsible for the acceleration and deceleration of the mean recirculation vortex. The shape of the recirculation zone also moderately deviates from the experimental results since the LES enhances the backward flow near the downstream edge of the vortex. This backward flow contributes to the inward momentum flux (see
Figure 6b) leading to an elevation and an inclination of the primary recirculation zone (see
Figure 3a,b).
The third mode (
Figure 12c) shows definite deviation from the experimental results concerning the curved trajectory of wind in the whole lower canyon. The LES’s third mode further contributes to the inward interaction momentum flux in this area. Meanwhile, the other flow patterns, such as the vortices above the windward and leeward roof, are appropriately predicted. The fourth mode (
Figure 12d), again, is very well forecasted.The fourth mode represents the late phase of the recirculation vortex, when the vortex is moving toward the ground. Although the latter two modes contribute only 6% and 4%, respectively, to the total TKE, Kellnerova et al. [
24] showed that they occasionally play a significant role in street-canyon flow dynamics.
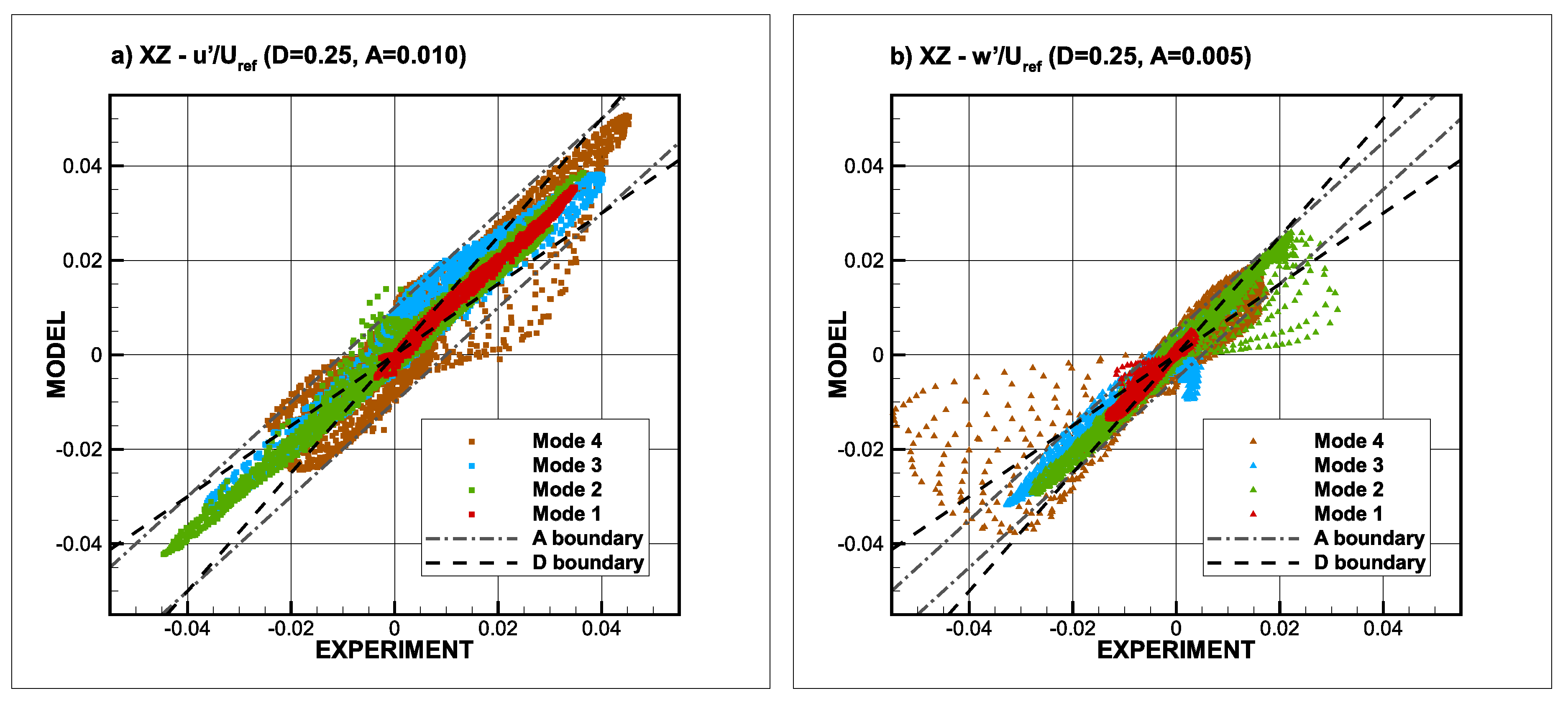
To evaluate the agreement between the simulated POD modes and the measured ones more clearly, the scatter plots for the first four dominant modes are displayed in
Figure 13. The excellent similarity between the experiment and model for the streamwise and vertical velocity fluctuations,
and
, respectively, is further confirmed quantitatively by the Hit rate metrics results, and are listed in
Table 7. The Hit rate score is evaluated in a similar way as in
Section 4.3.1, i.e., the absolute deviation boundary
A is taken as
and
for streamwise fluctuation and vertical fluctuation, respectively. These values of
A are calculated as the mean standard deviation of corresponding velocity fluctuation. The only difference is that here, the member
in Equation (
6) achieves a value of one when both the streamwise and vertical fluctuations satisfy the criteria for the streamwise and vertical deviation boundaries simultaneously.
Figure 14 displays the relative and cumulative contribution of each POD mode to the
. The relative contribution of the first mode calculated from all-the-canyons data (LESa), matched well with the experiment. Generally, in the case of higher modes, which mostly represent the vortices inside the canyon, the LES predicts their systematically higher percentages of the contribution in terms of the turbulent kinetic energy. The LES forecast therefore exhibits a higher degree of coherency in correspondence with the faster rate of the cumulative contribution convergence. This indicates that the LES generates either a higher number of vortices or a higher rotational speed of the vortices within the recirculation zone compared to the experiment, especially in connection with the vortex associated with the second and third POD mode. Incidentally,
Figure 6b illustrates the close relationship of the second POD mode with the inward interaction. The stronger second and third modes in LES consequently enhance the inward interaction of the momentum flux at the lower part of the canyon, thereby leading to a higher positive total momentum flux (the third column in
Figure 3) and a streamwise inclined recirculation pattern (the first and the second column in
Figure 3) that modifies the velocity profiles in the lower canyon part (
Figure 2a).

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













