A Velocity Dealiasing Algorithm on Frequency Diversity Pulse-Pair for Future Geostationary Spaceborne Doppler Weather Radar


Abstract
:1. Introduction
2. GSDWR System and Velocity Ambiguity Analysis
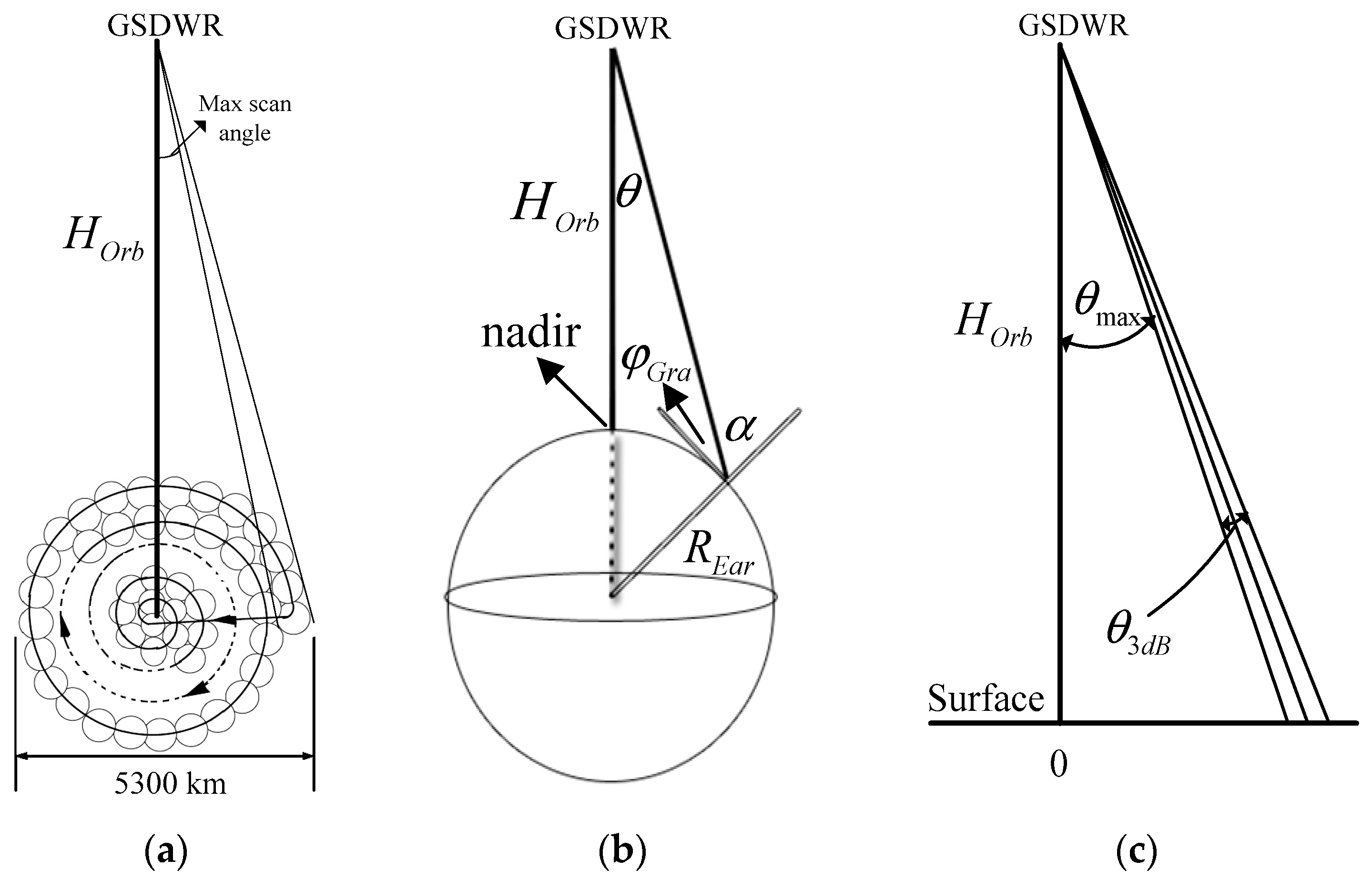
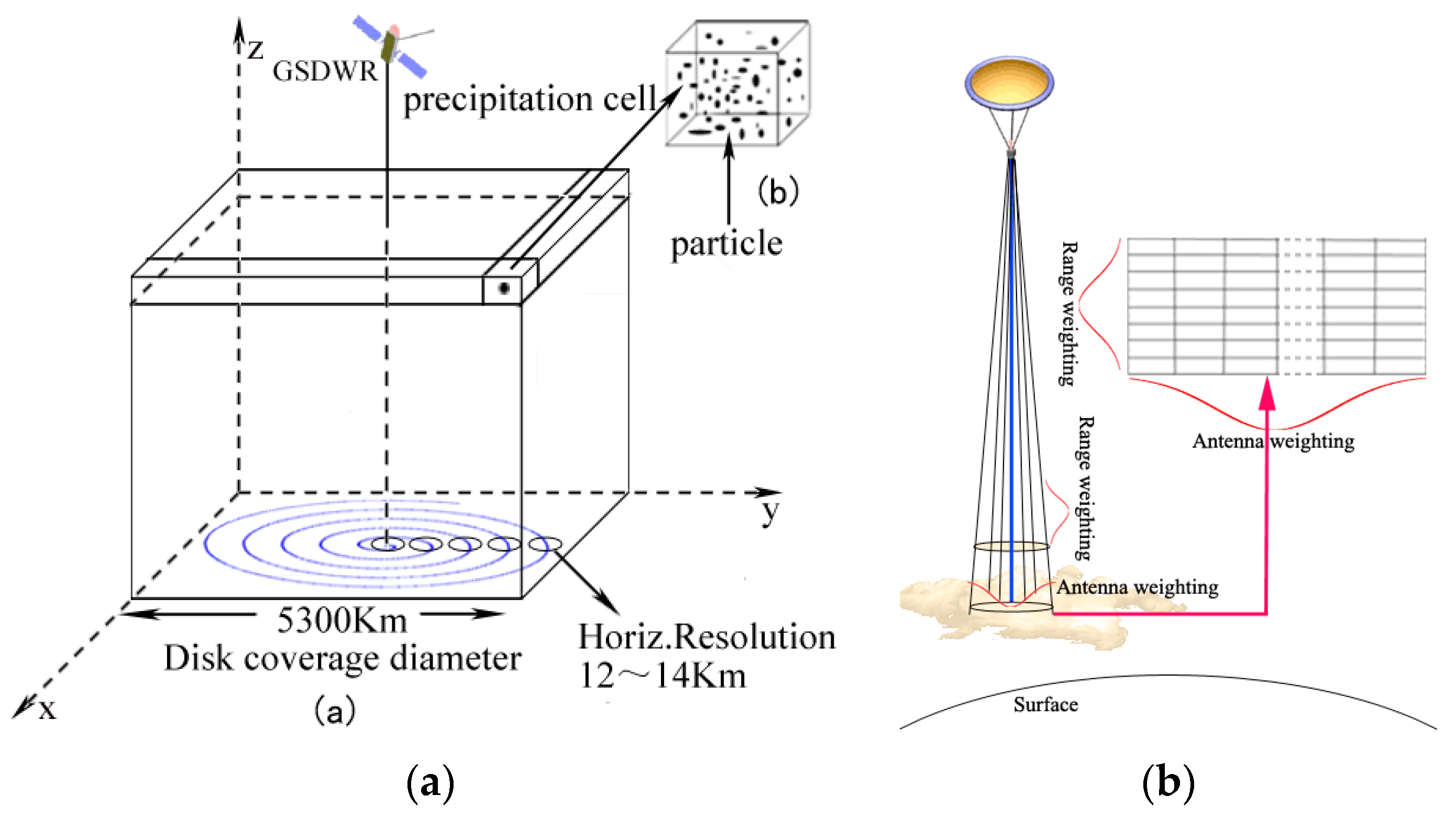
2.1. GSDWR Introduction
2.2. Velocity Ambiguity of GSDWR
3. Frequency Diversity Pulse-Pair Algorithm
3.1. FDPP Algorithm Principle
3.2. Analysis of FDPP Algorithm
4. Simulation and Results Discussion
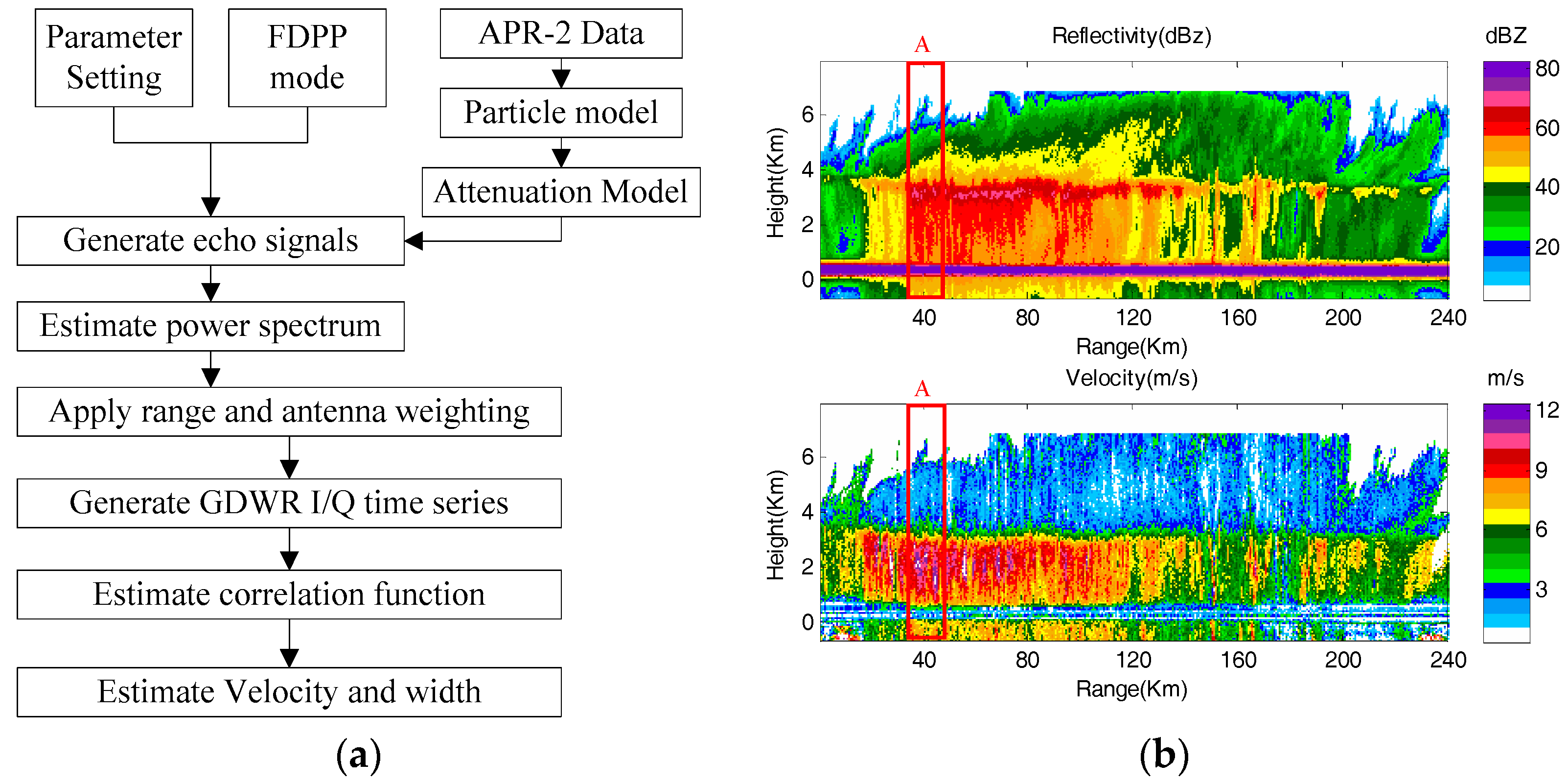
4.1. Echo Simulation of GSDWR
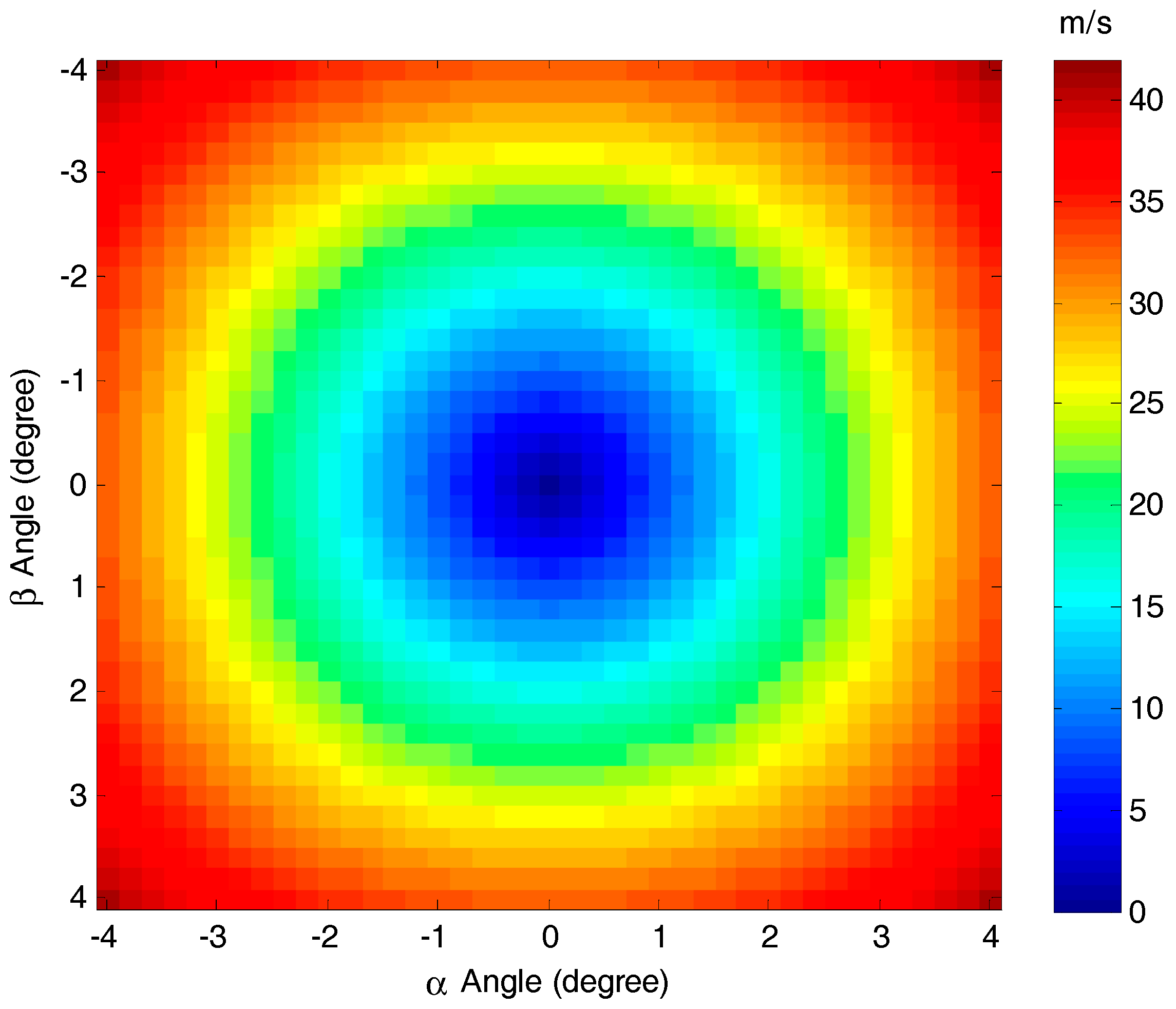
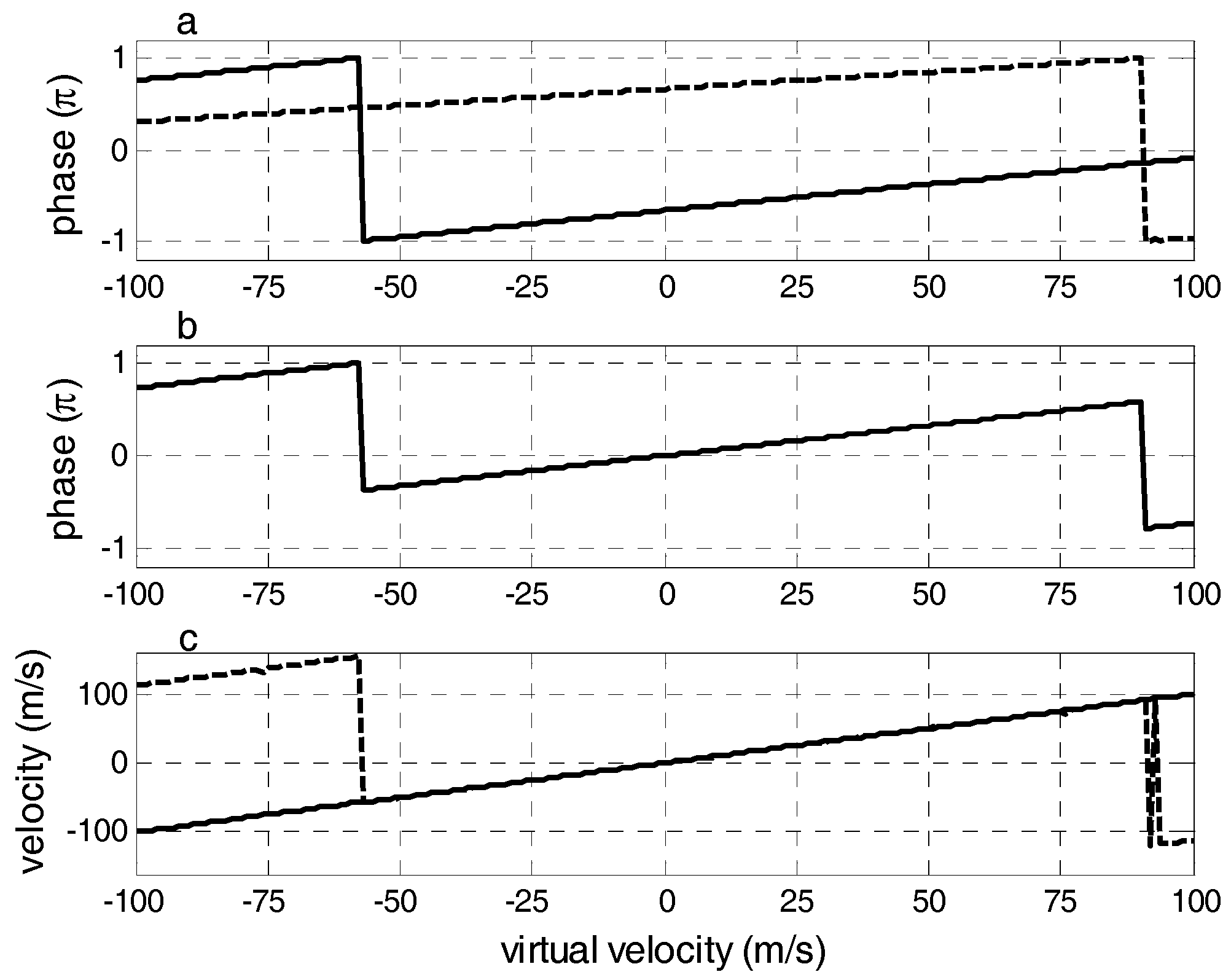
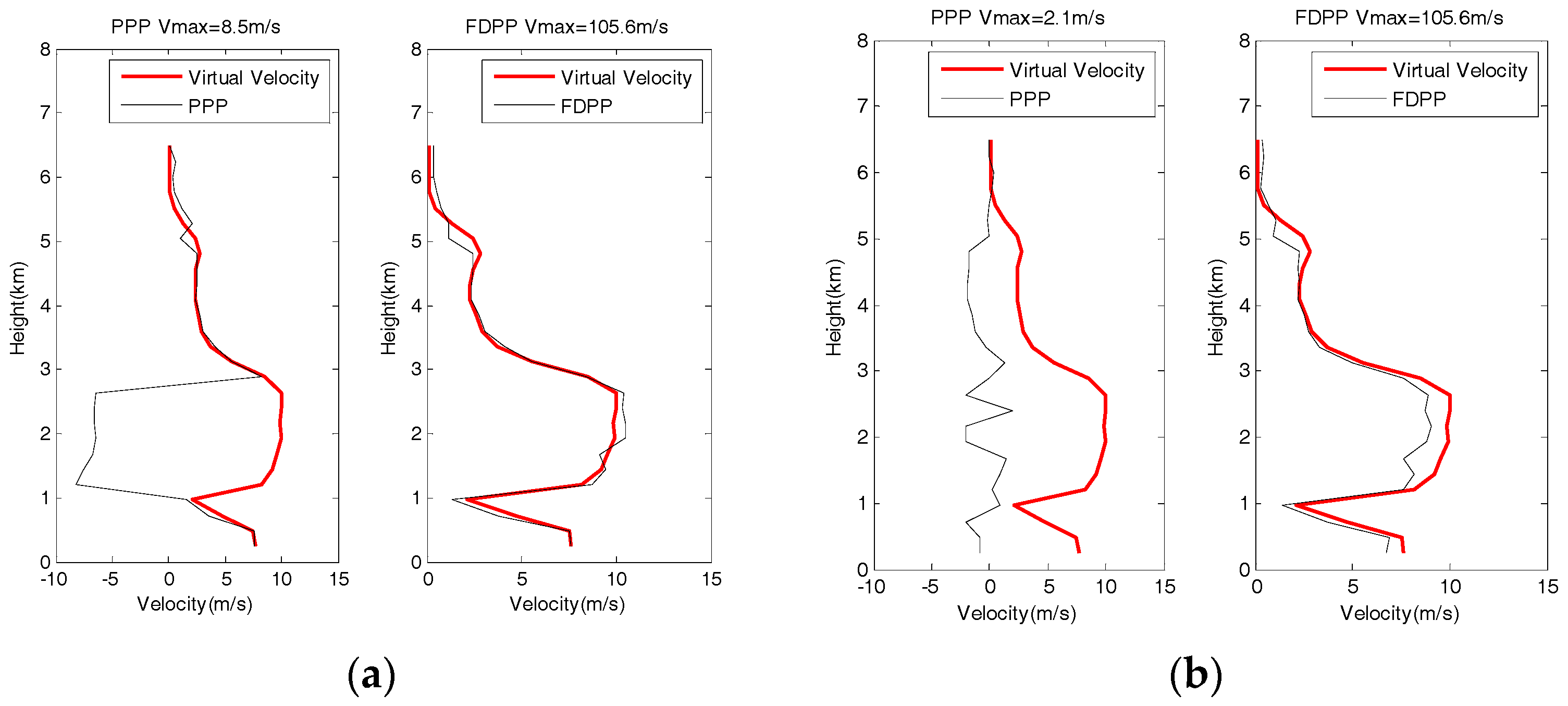
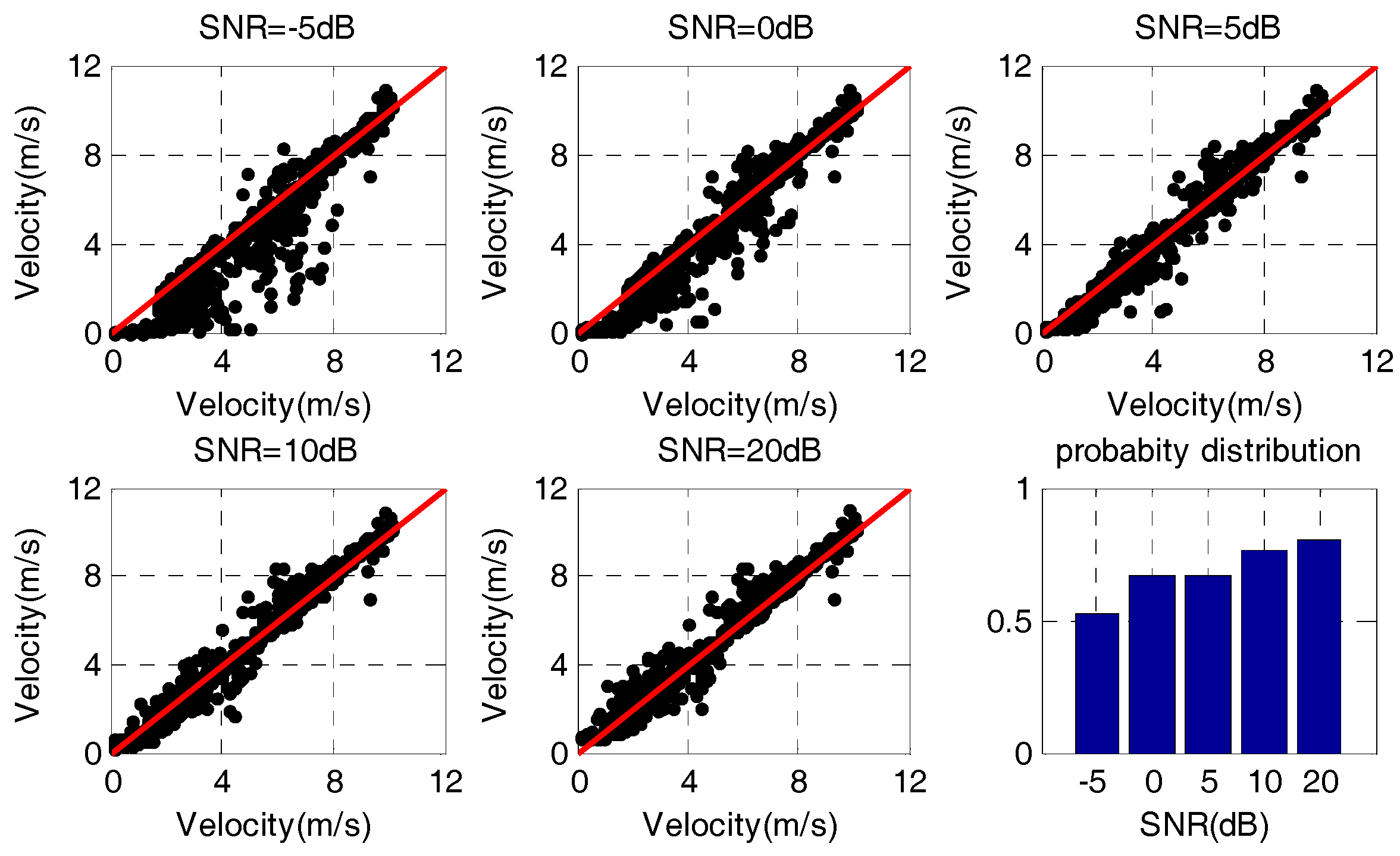
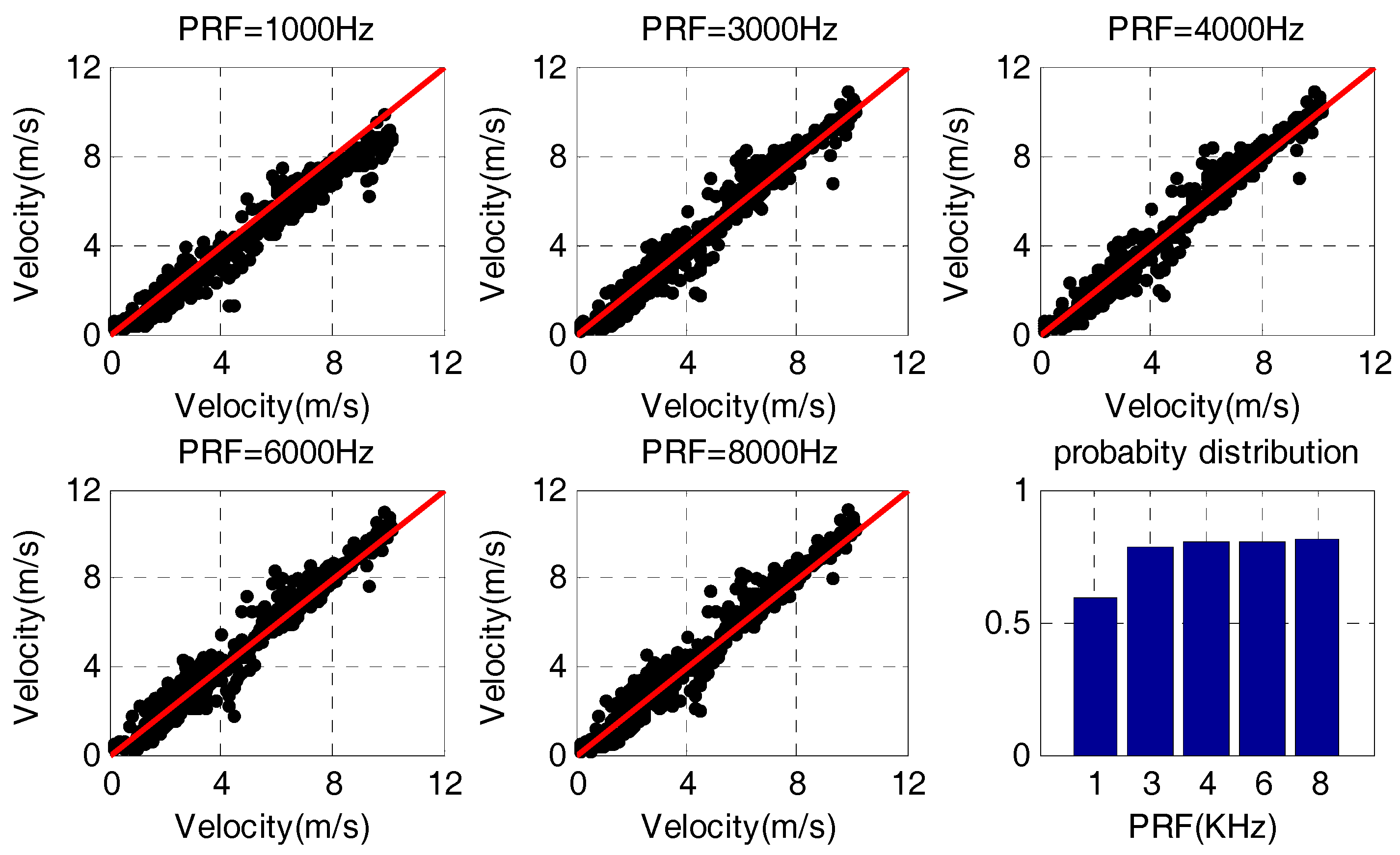
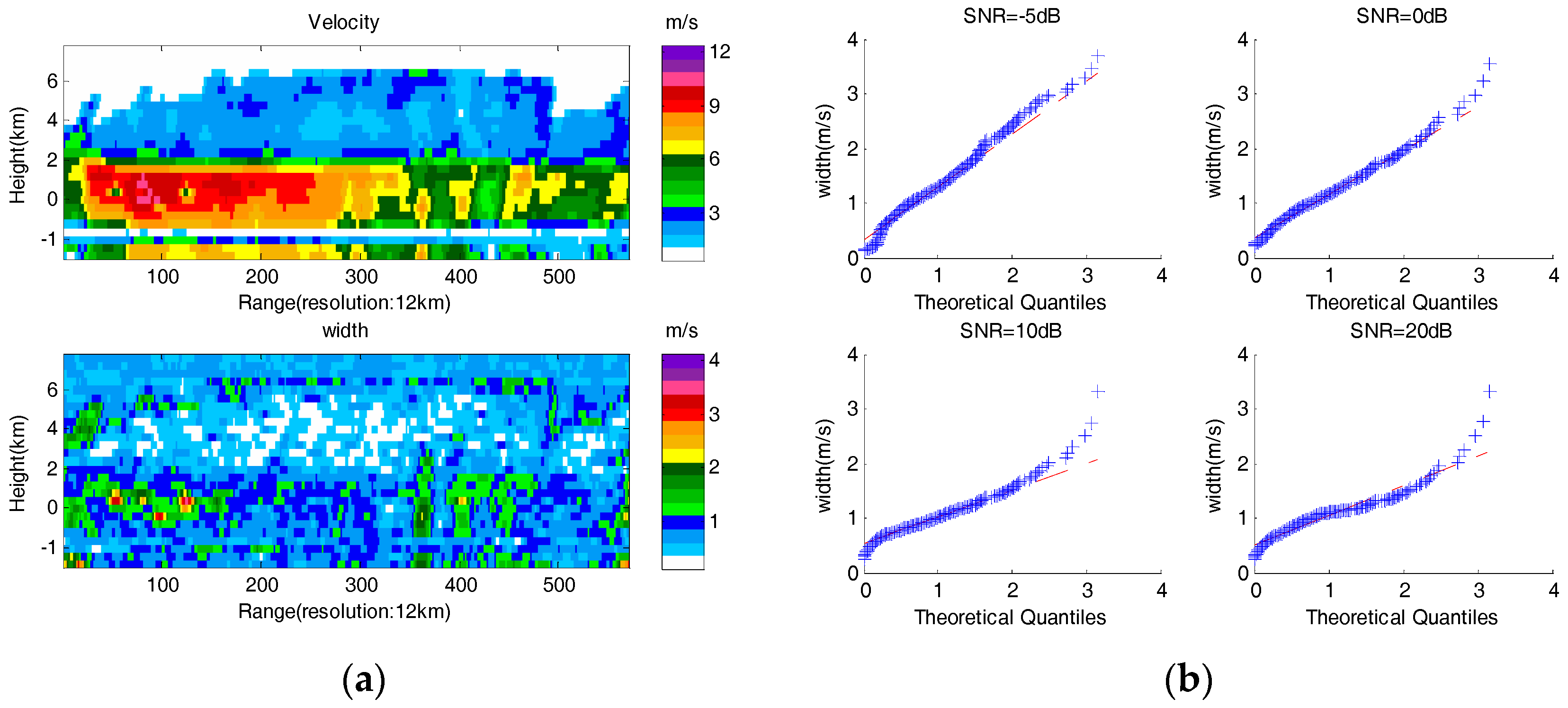
4.2. Analysis of the Simulation Results
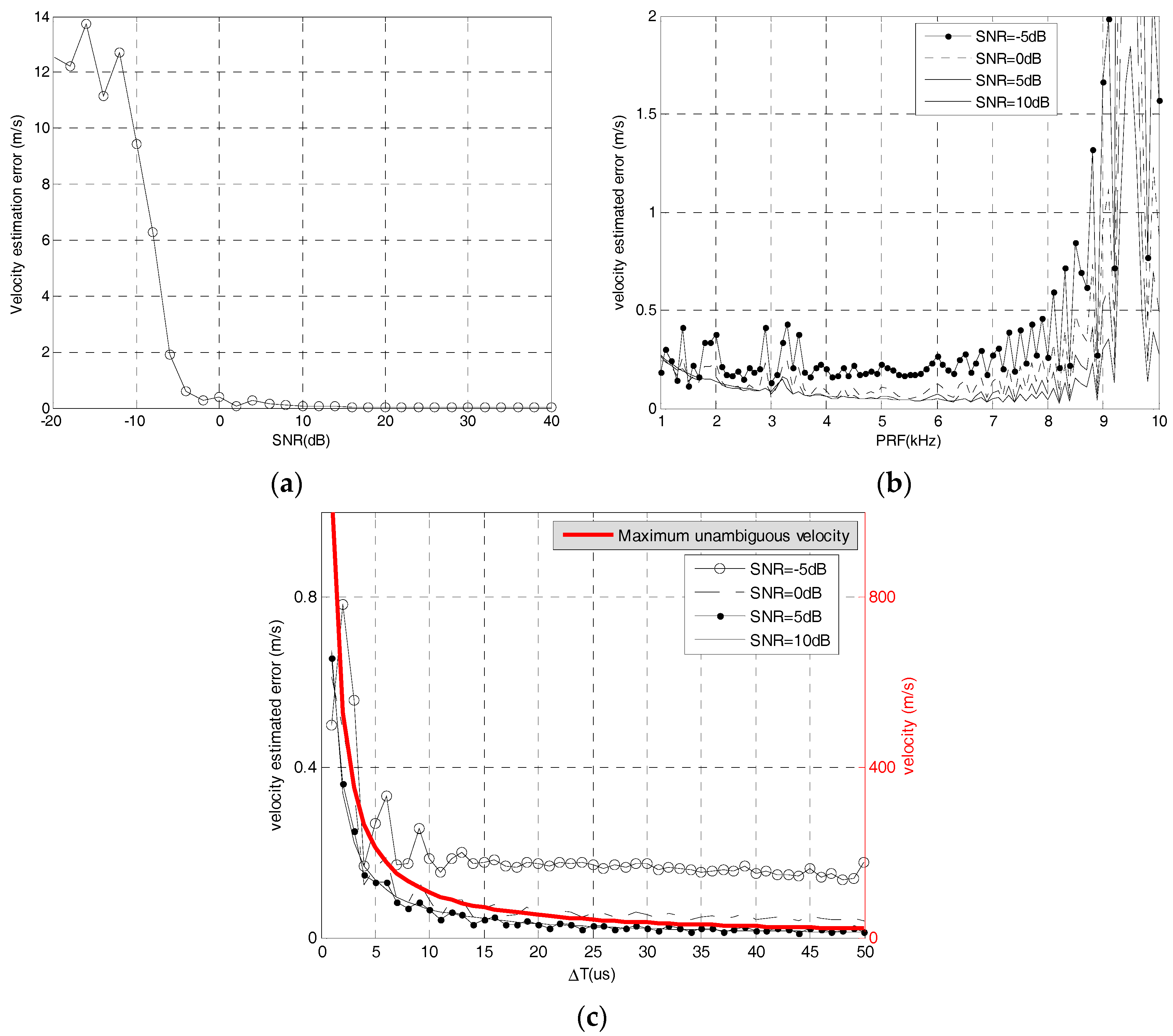
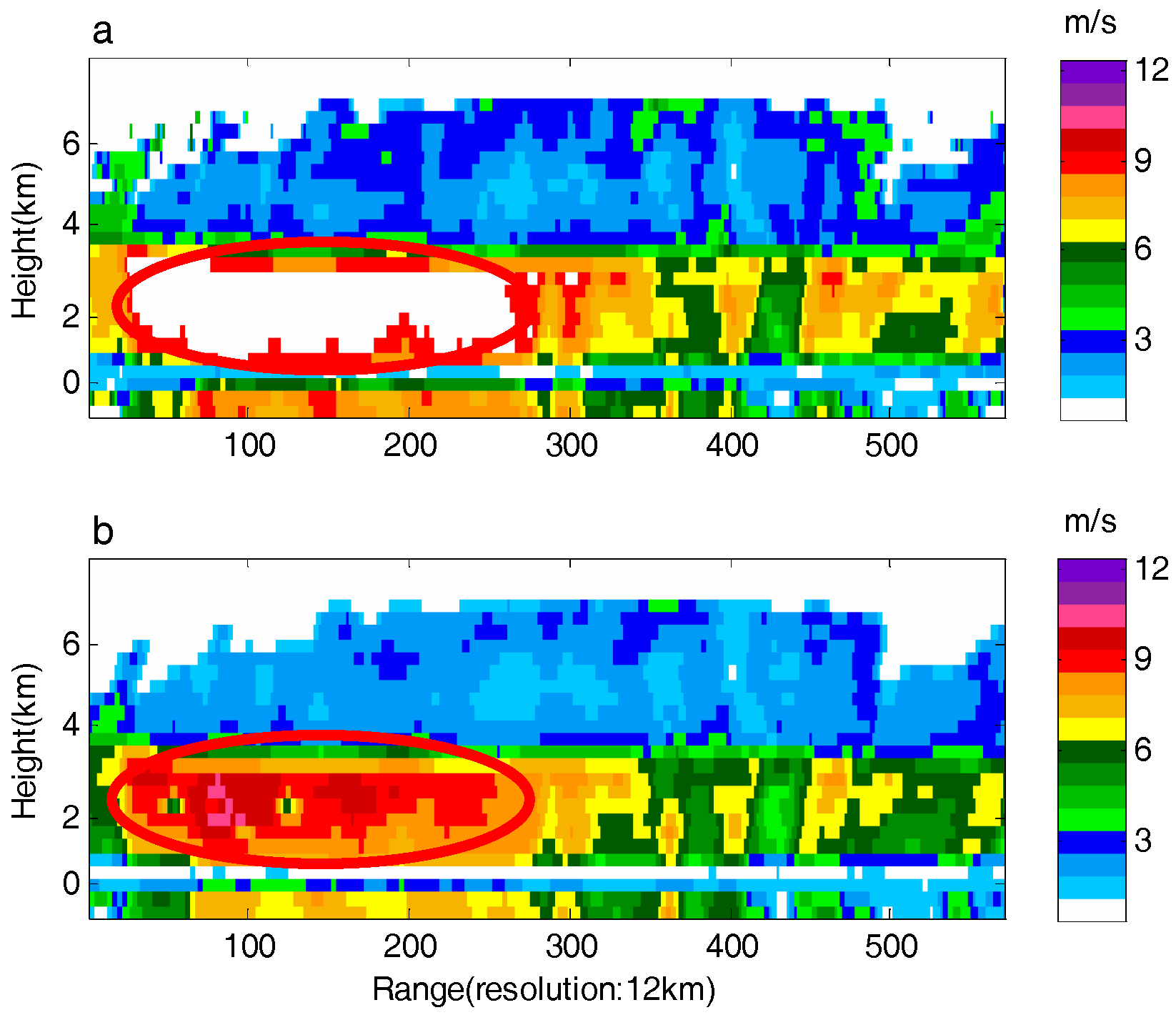
4.3. Performance Analysis of FDPP
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Im, E.; Smith, E.A.; Durden, S.L.; Tanelli, S.; Huang, J.; Rahmat-Samii, Y.; Lou, M. Instrument concept of nexrad in space (NIS)—A geostationary radar for hurricane studies, Geoscience and Remote Sensing Symposium. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 2146–2148. [Google Scholar]
- Kozu, T.; Kawanishi, T.; Kuroiwa, H.; Kojima, M.; Oikawa, K.; Kumagai, H.; Okamoto, K.I.; Okumura, M.; Nakatsuka, H.; Nishikawa, K. Development of precipitation radar onboard the tropical rainfall measuring mission (TRMM) satellite. IEEE Trans. Geosci. Remote Sens. 2001, 39, 102–116. [Google Scholar] [CrossRef]
- Tang, G.; Wan, W.; Zeng, Z.; Guo, X.; Li, N.; Long, D.; Hong, Y. An overview of the global precipitation measurement (GPM) mission and it’s latest development. Remote Sens. Technol. Appl. 2015, 30, 607–615. [Google Scholar]
- Zrnic, D.S.; Mahapatra, P.R. Two methods of ambiguity resolution in pulse doppler weather radars. IEEE Trans. Aerosp. Electr. Syst. 1985, AES-21, 470–483. [Google Scholar]
- Torres, S.M.; Dubel, Y.F.; Zrnić, D.S. Design, implementation, and demonstration of a staggered PRT algorithm for the WSR-88D. J. Atmos. Ocean. Technol. 2009, 21, 233–240. [Google Scholar] [CrossRef]
- Sachidananda, M.; Zrnić, D.S. Clutter filtering and spectral moment estimation for doppler weather radars using staggered pulse repetition time (PRT). J. Atmos. Ocean. Technol. 2000, 17, 323–331. [Google Scholar] [CrossRef]
- Altube, P.; Bech, J.; Argemí, O.; Rigo, T.; Pineda, N.; Collis, S.; Helmus, J. Correction of dual-PRF doppler velocity outliers in the presence of aliasing. J. Atmos. Ocean. Technol. 2017, 34, 1529–1543. [Google Scholar] [CrossRef]
- Sachidananda, M.; Zrnic, D.S. Phase coding for the resolution of range ambiguities in doppler weather radar. In Proceedings of the Record of the Thirty-First Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 2–5 November 1997; Volume 261, pp. 265–268. [Google Scholar]
- Zhou, H.P.; Sha, X.S.; Zhang, G.F. Resolving range ambiguity of weather radar using batch processing method. Mod. Radar 2006, 28, 20–21. [Google Scholar]
- Battaglia, A.; Tanelli, S.; Kollias, P. Polarization diversity for millimeter spaceborne doppler radars: An answer for observing deep convection? J. Atmos. Ocean. Technol. 2013, 30, 2768–2787. [Google Scholar] [CrossRef]
- Pazmany, A.L.; Galloway, J.C.; Mead, J.B.; Popstefanija, I.; Mcintosh, R.E.; Bluestein, H.W. Polarization diversity pulse-pair technique for millimeter-wavedoppler radar measurements of severe storm features. J. Atmos. Ocean. Technol. 1998, 16, 1900–1911. [Google Scholar] [CrossRef]
- Hengstebeck, T.; Wapler, K.; Heizenreder, D.; Joe, P. Radar network-based detection of mesocyclones at the german weather service. J. Atmos. Ocean. Technol. 2018, 35, 299–321. [Google Scholar] [CrossRef]
- Lewis, W.E.; Im, E.; Tanelli, S.; Haddad, Z.; Tripoli, G.J.; Smith, E.A. Geostationary doppler radar and tropical cyclone surveillance. J. Atmos. Ocean. Technol. 2011, 28, 1185–1191. [Google Scholar] [CrossRef]
- Im, E.; Smith, V.; Chandra, C.; Chandrasekar, V.; Chen, S.; Holland, G.; Kakar, R.; Tanelli, S.; Marks, F.; Tripoli, G. Workshop Report on Nexrad-in-Space—A Geostationary Satellite Doppler Weather Radar for Hurricane Studies. In Proceedings of the AMS 33rd Radar Meteorology, Cairns, Australia, 6–8 August 2007. [Google Scholar]
- Li, X.; He, J.; Wang, C.; Tang, S.; Hou, X. Evaluation of surface clutter for future geostationary spaceborne weather radar. Atmosphere 2017, 8, 14. [Google Scholar] [CrossRef]
- Fukao, S.; Hamazu, K. Radar for Meteorological and Atmospheric Observations; Springer: Heidelberg/Berlin, Germany, 2014. [Google Scholar]
- Xu, L.; Xu, D.; Sheng, L. A solution to velocity ambiguity of broad-band acoustic doppler current profiler. In Proceedings of the 2015 International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–5. [Google Scholar]
- Lixue, S.; Ming, W. Doppler velocity dealiasing with millimeter wave radar RHI data. In Proceedings of the 2010 Second IITA International Conference on Geoscience and Remote Sensing, Qingdao, China, 28–31 Auguet 2010; pp. 216–218. [Google Scholar]
- Guillot, M.J. Effect of storm size on predicted hurricane storm surge in southeast louisiana. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–9. [Google Scholar]
- Torres, S.M.; Warde, D.A. Staggered-prt sequences for doppler weather radars. Part I: Spectral analysis using the autocorrelation spectral density. J. Atmos. Ocean. Technol. 2016, 34, 51–63. [Google Scholar] [CrossRef]
- Venkatesh, V.; Li, L.; McLinden, M.; Heymsfield, G.; Coon, M. A frequency diversity pulse-pair algorithm for extending doppler radar velocity nyquist range. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Sy, O.O.; Tanelli, S.; Takahashi, N.; Ohno, Y.; Horie, H.; Kollias, P. Simulation of earthcare spaceborne doppler radar products using ground-based and airborne data: Effects of aliasing and nonuniform beam-filling. IEEE Trans. Geosc. Remote Sens. 2014, 52, 1463–1479. [Google Scholar] [CrossRef]
- Kollias, P.; Tanelli, S.; Battaglia, A.; Tatarevic, A. Evaluation of earthcare cloud profiling radar doppler velocity measurements in particle sedimentation regimes. J. Atmos. Ocean. Technol. 2011, 31, 366–386. [Google Scholar] [CrossRef]
- Im, E.; Durden, S.L.; Tanelli, S. Recent advances in spaceborne precipitation radar measurement techniques and technology. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006. [Google Scholar]
- Bu, Z.C.; Li, B.; Shao, N.; Hu, X.Y.; Li, Z.; Chen, Y.B. Contrast validating on dual prf technology of CINRAD/SA weather radar with I/Q signal simulation and algorithm. Trans. Beijing Inst. Technol. 2016, 36, 1289–1293. [Google Scholar]
- Doviak, R.J.; Zrnić, D.S. Doppler Radar and Weather Observations; Dover Publications: Mineola, NY, USA, 2006; p. 4531. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Value |
|---|---|
| Frequency | 35 GHz |
| Antenna diameter | 35 m |
| Time for a full scan | 60 min |
| Disk coverage diameter | 5300 km |
| Ant. 3-dB beam-width | 0.019° |
| Max. spiral scan angle | 4° |
| Dynamic range | 70 dB |
| Sys. Noise temp | 910 K |
| Doppler Precision | 0.5 m/s |
| Min. Zeq | 5 dBZ |
| Peak power | 100 W |
| Vertical Ranging range | 25 km |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wang, C.; Qin, Z.; He, J.; Liu, F.; Sun, Q. A Velocity Dealiasing Algorithm on Frequency Diversity Pulse-Pair for Future Geostationary Spaceborne Doppler Weather Radar. Atmosphere 2018, 9, 234. https://doi.org/10.3390/atmos9060234
Li X, Wang C, Qin Z, He J, Liu F, Sun Q. A Velocity Dealiasing Algorithm on Frequency Diversity Pulse-Pair for Future Geostationary Spaceborne Doppler Weather Radar. Atmosphere. 2018; 9(6):234. https://doi.org/10.3390/atmos9060234
Chicago/Turabian StyleLi, Xuehua, Chuanzhi Wang, Zhengxia Qin, Jianxin He, Fang Liu, and Qing Sun. 2018. "A Velocity Dealiasing Algorithm on Frequency Diversity Pulse-Pair for Future Geostationary Spaceborne Doppler Weather Radar" Atmosphere 9, no. 6: 234. https://doi.org/10.3390/atmos9060234
APA StyleLi, X., Wang, C., Qin, Z., He, J., Liu, F., & Sun, Q. (2018). A Velocity Dealiasing Algorithm on Frequency Diversity Pulse-Pair for Future Geostationary Spaceborne Doppler Weather Radar. Atmosphere, 9(6), 234. https://doi.org/10.3390/atmos9060234