Impacts of Introducing Remote Sensing Soil Moisture in Calibrating a Distributed Hydrological Model for Streamflow Simulation


Abstract
:1. Introduction
2. Study Area and Data
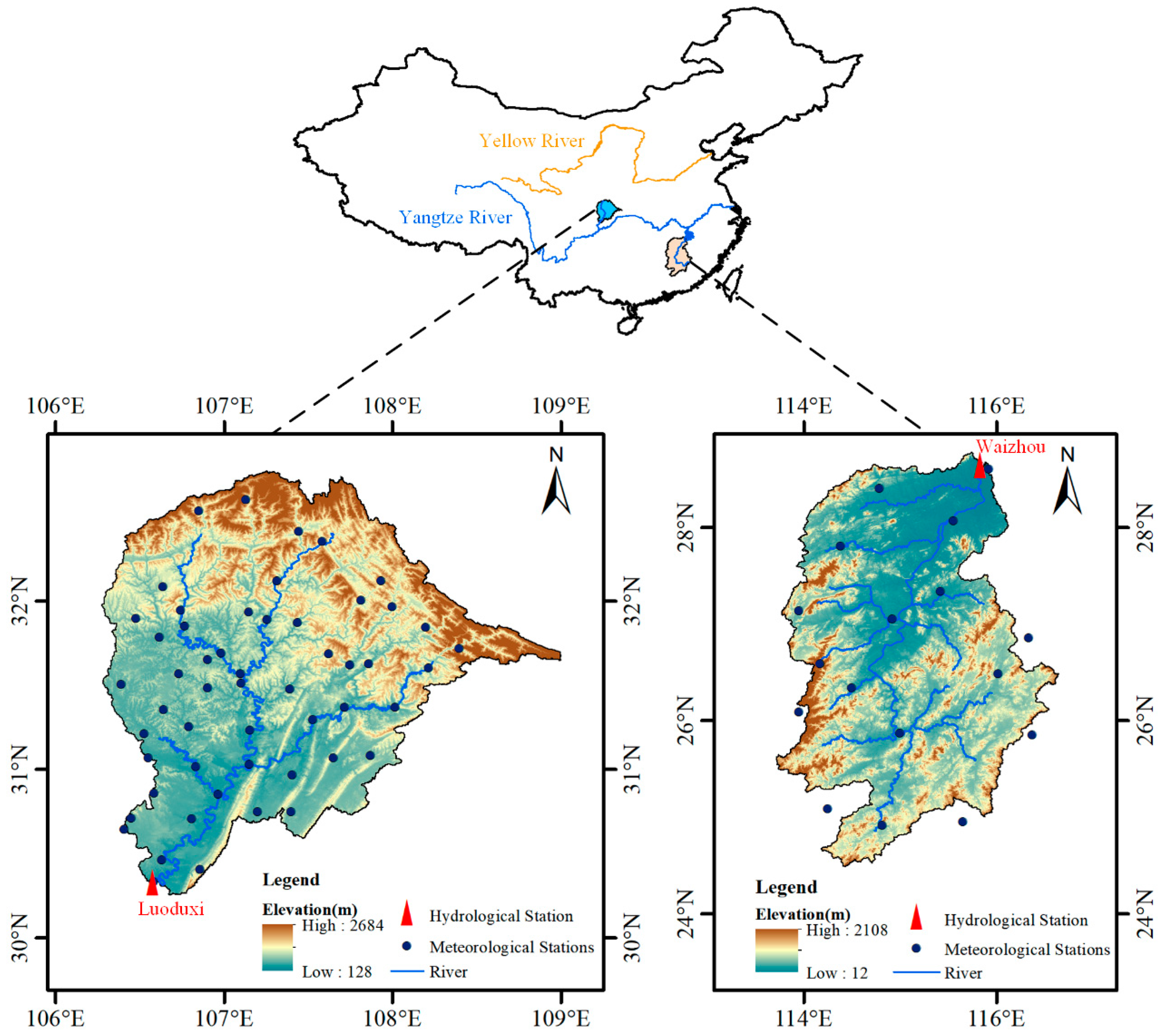
2.1. Study Area
2.2. Meteorological Data
2.3. SMAP Soil Moisture Product
3. Methodology
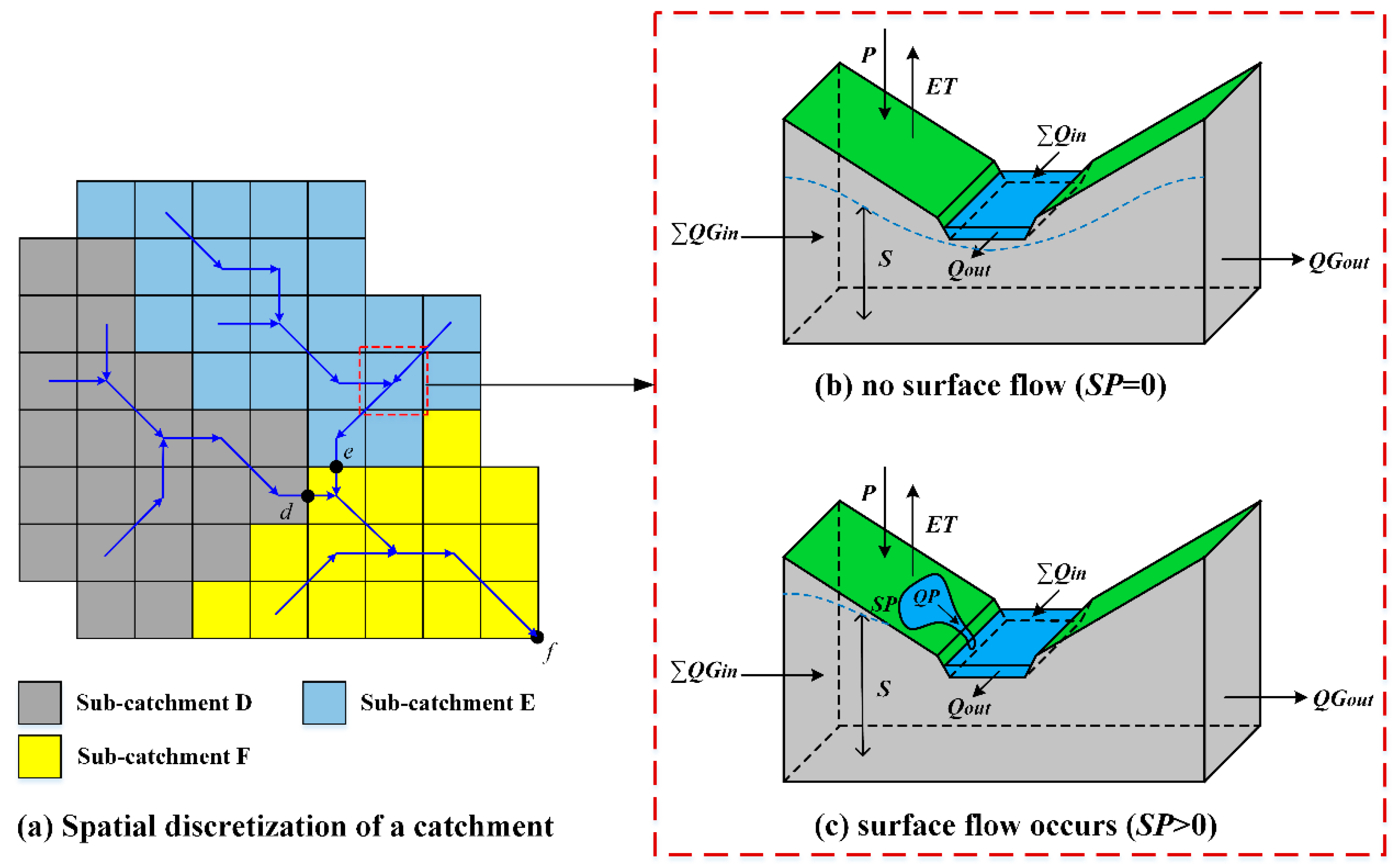
3.1. The DEM-Based Distributed Rainfall-Runoff Model (DDRM)
3.1.1. Runoff Generation at Cell Scale
3.1.2. Sub-Catchment Outlet Streamflow Calculation
3.1.3. Runoff Routing through River Networks
3.1.4. Model Parameters
3.2. Pre-Processing SMAP Soil Moisture Product
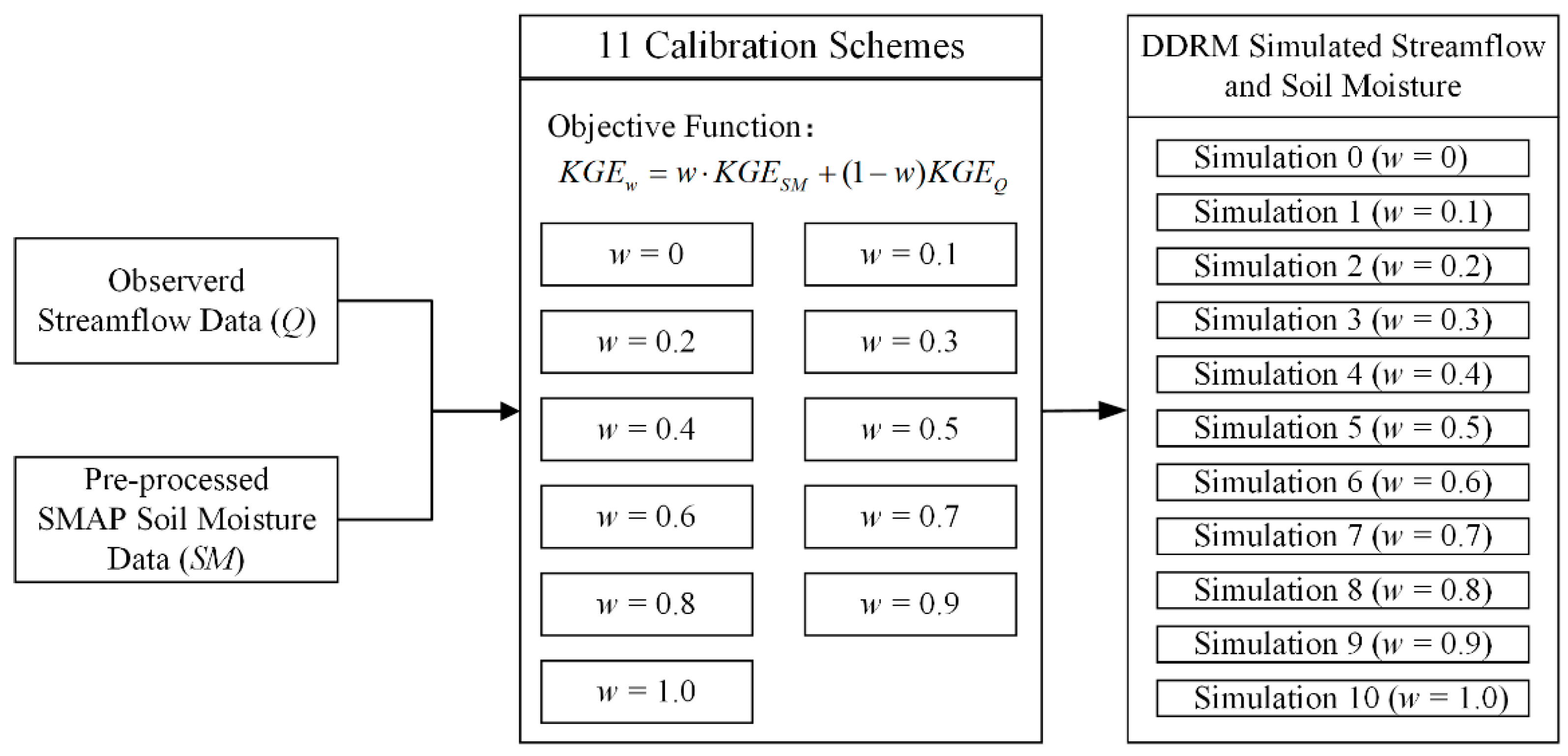
3.3. Parameter Calibration Schemes
4. Results and Discussion
4.1. Simulation Performance of Streamflow and Soil Moisture
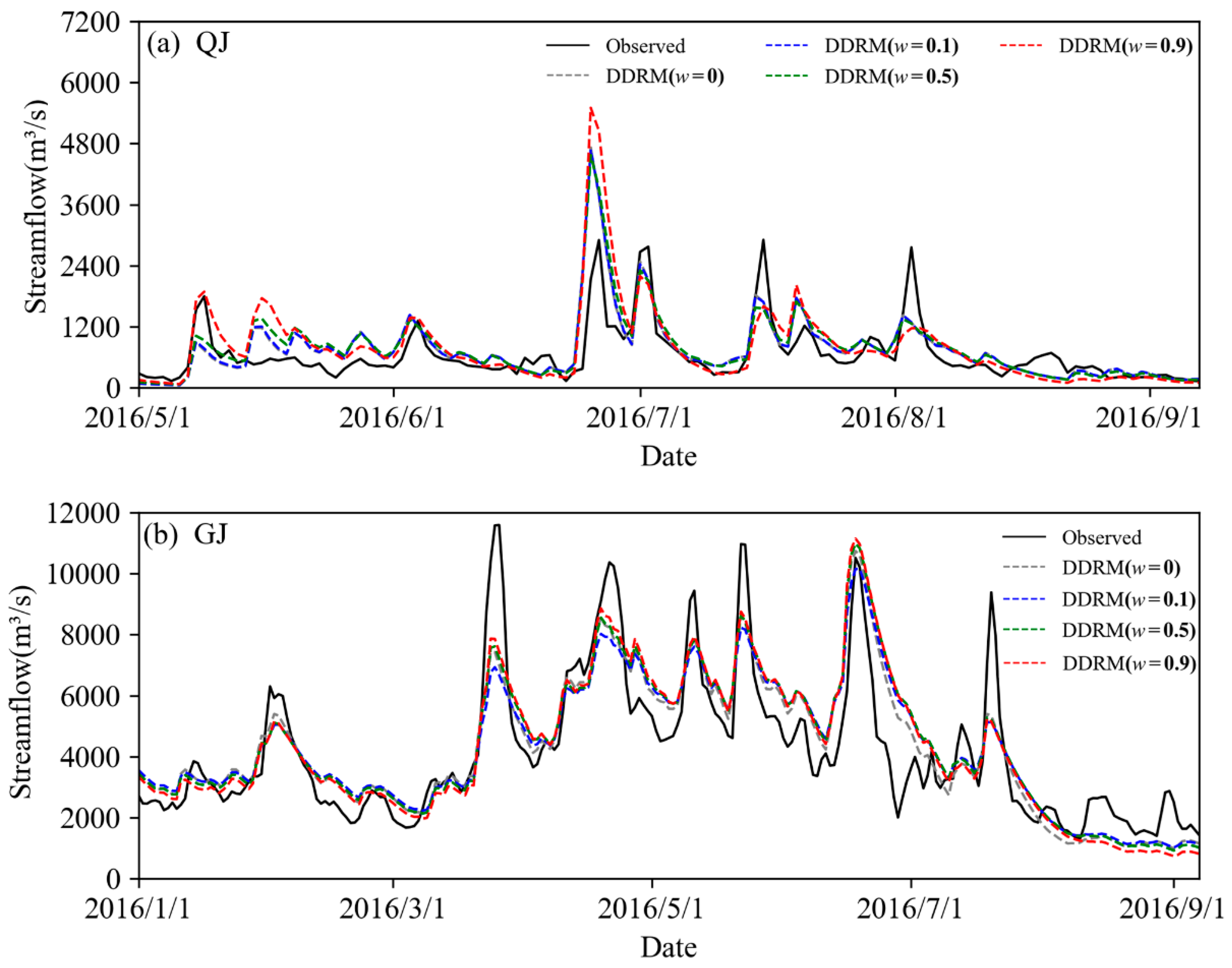
4.2. Streamflow Simulation under Different Calibration Schemes
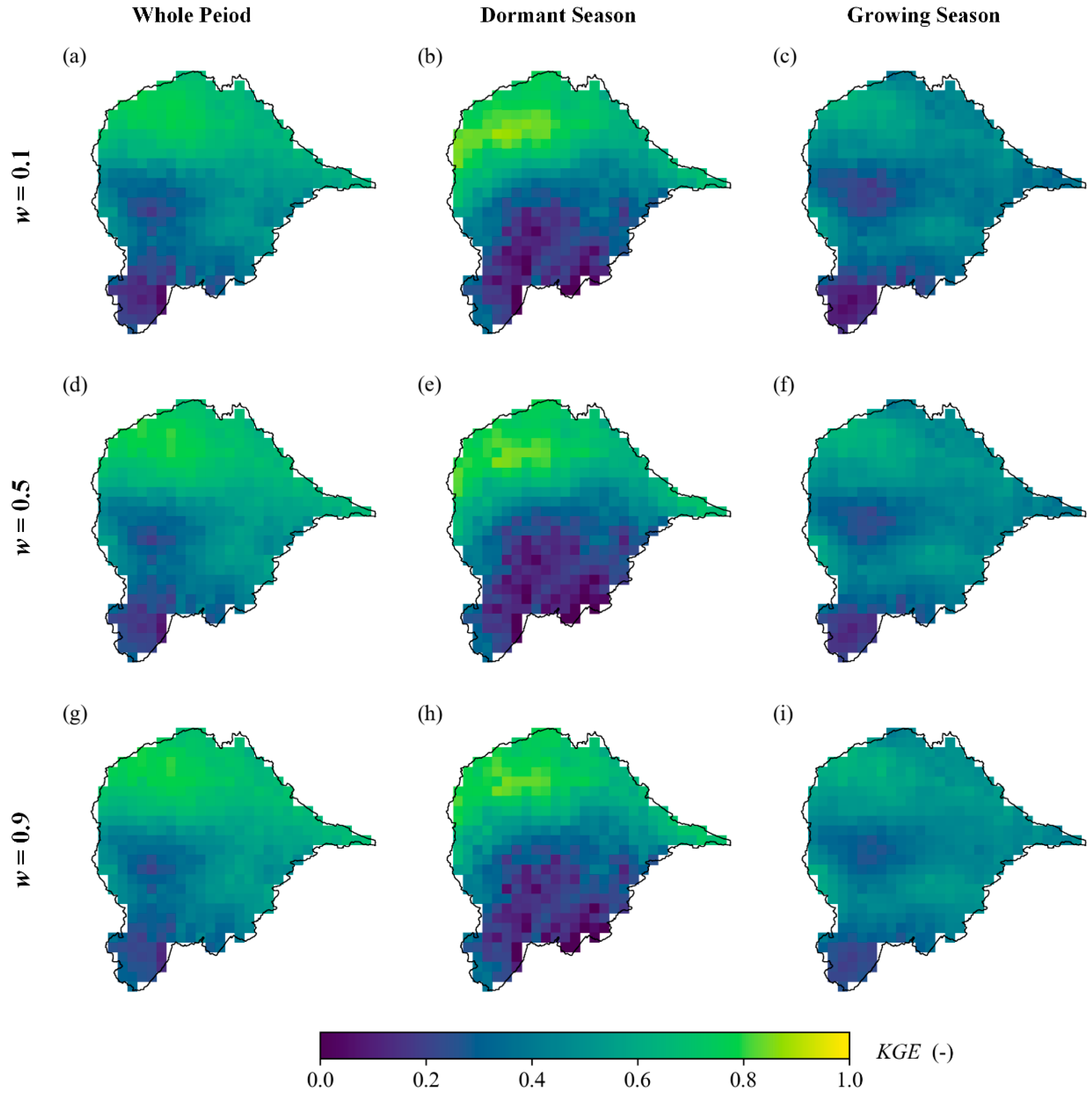
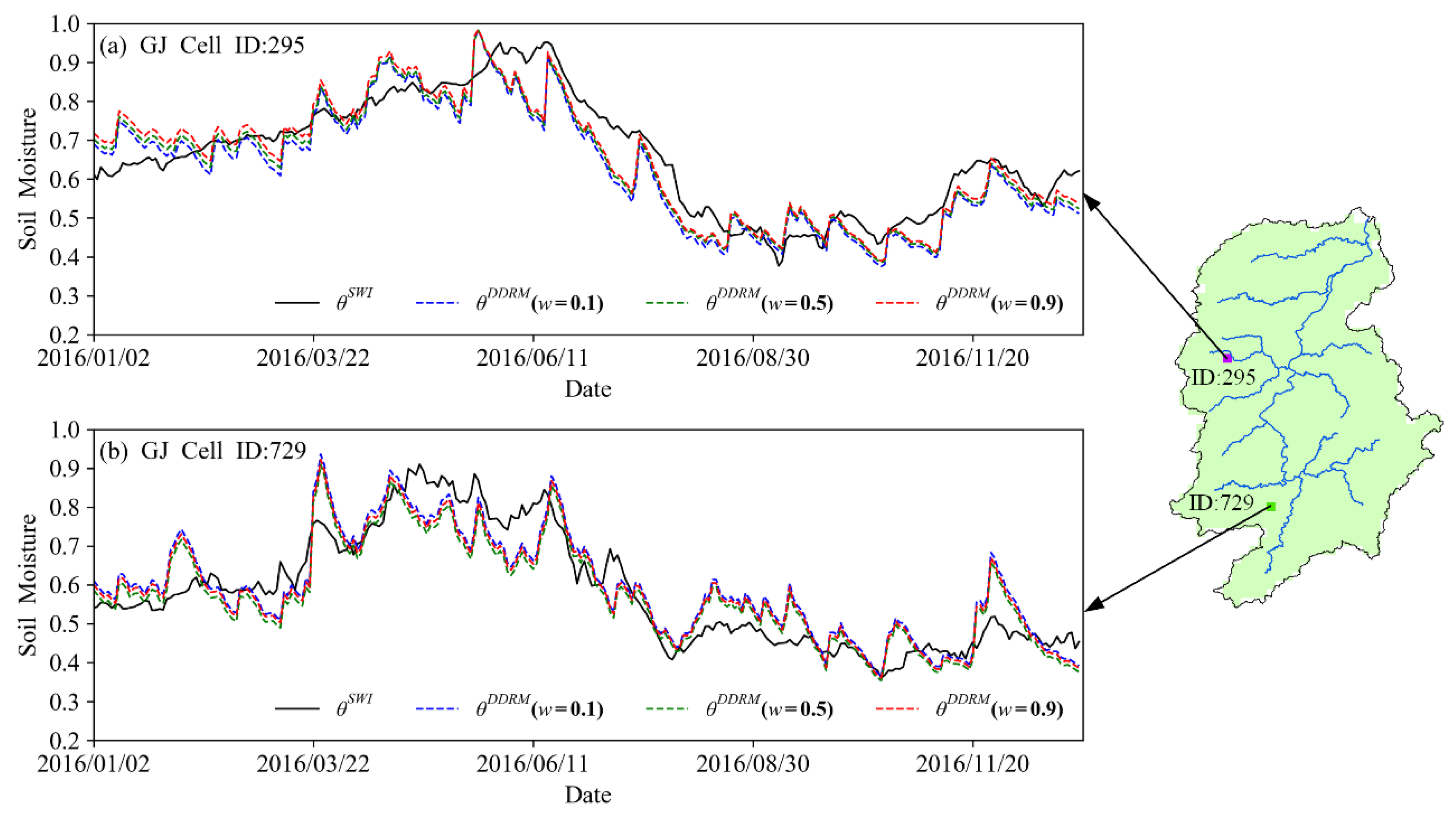
4.3. Soil Moisture Simulation under Different Calibration Schemes
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Johnston, R.; Smakhtin, V. Hydrological Modeling of Large river Basins: How Much is Enough? Water Resour. Manag. 2014, 28, 2695–2730. [Google Scholar] [CrossRef] [Green Version]
- Keesstra, S.D.; Temme, A.; Schoorl, J.M.; Visser, S.M. Evaluating the hydrological component of the new catchment-scale sediment delivery model LAPSUS-D. Geomorphology 2014, 212, 97–107. [Google Scholar] [CrossRef]
- Thorstensen, A.; Nguyen, P.; Hsu, K.; Sorooshian, S. Using Densely Distributed Soil Moisture Observations for Calibration of a Hydrologic Model. J. Hydrometeorol. 2016, 17, 571–590. [Google Scholar] [CrossRef]
- Beven, K. Prophecy, reality and uncertainty in distributed hydrological modelling. Adv. Water Resour. 1993, 16, 41–51. [Google Scholar] [CrossRef]
- Kundu, D.; Vervoort, R.W.; van Ogtrop, F.F. The value of remotely sensed surface soil moisture for model calibration using SWAT. Hydrol. Process. 2017, 31, 2764–2780. [Google Scholar] [CrossRef]
- Kunnath-Poovakka, A.; Ryu, D.; Renzullo, L.J.; George, B. The efficacy of calibrating hydrologic model using remotely sensed evapotranspiration and soil moisture for streamflow prediction. J. Hydrol. 2016, 535, 509–524. [Google Scholar] [CrossRef]
- Li, Y.; Grimaldi, S.; Pauwels, V.R.N.; Walker, J.P. Hydrologic model calibration using remotely sensed soil moisture and discharge measurements: The impact on predictions at gauged and ungauged locations. J. Hydrol. 2018, 557, 897–909. [Google Scholar] [CrossRef]
- Li, Y.; Grimaldi, S.; Walker, J.; Pauwels, V. Application of Remote Sensing Data to Constrain Operational Rainfall-Driven Flood Forecasting: A Review. Remote Sens. 2016, 8, 456. [Google Scholar] [CrossRef]
- Fenicia, F.; Savenije, H.H.G.; Matgen, P.; Pfister, L. A comparison of alternative multiobjective calibration strategies for hydrological modeling. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef] [Green Version]
- Revilla-Romero, B.; Beck, H.E.; Burek, P.; Salamon, P.; de Roo, A.; Thielen, J. Filling the gaps: Calibrating a rainfall-runoff model using satellite-derived surface water extent. Remote Sens. Environ. 2015, 171, 118–131. [Google Scholar] [CrossRef] [Green Version]
- Lopez Lopez, P.; Sutanudjaja, E.; Schellekens, J.; Sterk, G.; Bierkens, M. Calibration of a large-scale hydrological model using satellite-based soil moisture and evapotranspiration products. Hydrol. Earth Syst. Sci. Discuss. 2017, 21, 3125–3144. [Google Scholar] [CrossRef] [Green Version]
- Laiolo, P.; Gabellani, S.; Campo, L.; Silvestro, F.; Delogu, F.; Rudari, R.; Pulvirenti, L.; Boni, G.; Fascetti, F.; Pierdicca, N.; et al. Impact of different satellite soil moisture products on the predictions of a continuous distributed hydrological model. Int. J. Appl. Earth Obs. Geoinf. 2016, 48, 131–145. [Google Scholar] [CrossRef]
- Lian, J.; Li, D.; Huang, M.; Chen, H. Evaluation of remote sensing-based evapotranspiration estimates using a water transfer numerical simulation under different vegetation conditions in an arid area. Hydrol. Process. 2018, 32, 1801–1813. [Google Scholar] [CrossRef]
- Zink, M.; Mai, J.; Cuntz, M.; Samaniego, L. Conditioning a Hydrologic Model Using Patterns of Remotely Sensed Land Surface Temperature. Water Resour. Res. 2018, 54, 2976–2998. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Keesstra, S.; Nunes, J.P.; Saco, P.; Parsons, T.; Poeppl, R.; Masselink, R.; Cerdà, A. The way forward: Can connectivity be useful to design better measuring and modelling schemes for water and sediment dynamics? Sci. Total Environ. 2018, 644, 1557–1572. [Google Scholar] [CrossRef] [PubMed]
- Tianjiao, F.; Wei, W.; Liding, C.; Keesstra, S.D.; Yang, Y. Effects of land preparation and plantings of vegetation on soil moisture in a hilly loess catchment in China. Land Degrad. Dev. 2018, 29, 1427–1441. [Google Scholar] [CrossRef]
- Keesstra, S.D.; Davis, J.; Masselink, R.H.; Casalí, J.; Peeters, E.T.; Dijksma, R. Coupling hysteresis analysis with sediment and hydrological connectivity in three agricultural catchments in Navarre, Spain. J. Soils Sediments 2019, 19, 1598–1612. [Google Scholar] [CrossRef]
- Merz, B.; Plate, E.J. An analysis of the effects of spatial variability of soil and soil moisture on runoff. Water Resour. Res. 1997, 33, 2909–2922. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Yang, K.; Qin, J.; Cui, Q.; Lu, H.; La, Z.; Han, M.; Tang, W. Evaluation of SMAP, SMOS, and AMSR2 soil moisture retrievals against observations from two networks on the Tibetan Plateau. J. Geophys. Res. Atmos 2017, 122, 5780–5792. [Google Scholar] [CrossRef]
- Gebler, S.; Hendricks Franssen, H.J.; Kollet, S.J.; Qu, W.; Vereecken, H. High resolution modelling of soil moisture patterns with TerrSysMP: A comparison with sensor network data. J. Hydrol. 2017, 547, 309–331. [Google Scholar] [CrossRef]
- Gumuzzio, A.; Brocca, L.; Sánchez, N.; González-Zamora, A.; Martínez-Fernández, J. Comparison of SMOS, modelled and in situ long-term soil moisture series in the northwest of Spain. Hydrol. Sci. J. 2016, 61, 2610–2625. [Google Scholar] [CrossRef]
- Xiong, L.; Yang, H.; Zeng, L.; Xu, C. Evaluating Consistency between the Remotely Sensed Soil Moisture and the Hydrological Model-Simulated Soil Moisture in the Qujiang Catchment of China. Water 2018, 10, 291. [Google Scholar] [CrossRef]
- Rötzer, K.; Montzka, C.; Bogena, H.; Wagner, W.; Kerr, Y.H.; Kidd, R.; Vereecken, H. Catchment scale validation of SMOS and ASCAT soil moisture products using hydrological modeling and temporal stability analysis. J. Hydrol. 2014, 519, 934–946. [Google Scholar] [CrossRef]
- O’Neill, P.; Chan, S.; Colliander, A.; Dunbar, S.; Njoku, E.; Bindlish, R.; Chen, F.; Jackson, T.; Burgin, M.; Piepmeier, J.; et al. Evaluation of The Validated Soil Moisture Product from The Smap Radiometerieee. In Proceedings of the 2016 International Symposium on Geoscience and Remote Sensing IGARSS, Beijing, China, 10–15 July 2016; pp. 125–128. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.; Font, J.; Reul, N.; Gruhier, C. The SMOS mission: New tool for monitoring key elements ofthe global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Lievens, H.; Tomer, S.K.; Al Bitar, A.; De Lannoy, G.J.M.; Drusch, M.; Dumedah, G.; Hendricks Franssen, H.J.; Kerr, Y.H.; Martens, B.; Pan, M.; et al. SMOS soil moisture assimilation for improved hydrologic simulation in the Murray Darling Basin, Australia. Remote Sens. Environ. 2015, 168, 146–162. [Google Scholar] [CrossRef] [Green Version]
- Brown, M.E.; Escobar, V.; Moran, S.; Entekhabi, D.; O’Neill, P.E.; Njoku, E.G.; Doorn, B.; Entin, J.K. NASA’s soil moisture active passive (SMAP) mission and opportunities for applications users. Bull. Am. Meteorol. Soc. 2013, 94, 1125–1128. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Koster, R.D.; Crow, W.T.; Reichle, R.H.; Mahanama, S.P. Estimating Basin-Scale Water Budgets with SMAP Soil Moisture Data. Water Resour. Res. 2018, 54, 4228–4244. [Google Scholar] [CrossRef]
- Alvarez-Garreton, C.; Ryu, D.; Western, A.W.; Crow, W.T.; Robertson, D.E. The impacts of assimilating satellite soil moisture into a rainfall–runoff model in a semi-arid catchment. J. Hydrol. 2014, 519, 2763–2774. [Google Scholar] [CrossRef]
- Meng, S.; Xie, X.; Liang, S. Assimilation of soil moisture and streamflow observations to improve flood forecasting with considering runoff routing lags. J. Hydrol. 2017, 550, 568–579. [Google Scholar] [CrossRef]
- Sun, L.; Seidou, O.; Nistor, I.; Goïta, K.; Magagi, R. Simultaneous assimilation of in situ soil moisture and streamflow in the SWAT model using the Extended Kalman Filter. J. Hydrol. 2016, 543, 671–685. [Google Scholar] [CrossRef]
- Yan, H.; Moradkhani, H. Combined assimilation of streamflow and satellite soil moisture with the particle filter and geostatistical modeling. Adv. Water Resour. 2016, 94, 364–378. [Google Scholar] [CrossRef]
- Alvarez-Garreton, C.; Ryu, D.; Western, A.W.; Su, C.H.; Crow, W.T.; Robertson, D.E.; Leahy, C. Improving operational flood ensemble prediction by the assimilation of satellite soil moisture: Comparison between lumped and semi-distributed schemes. Hydrol. Earth Syst. Sci. 2015, 19, 1659–1676. [Google Scholar] [CrossRef]
- Leroux, D.J.; Pellarin, T.; Vischel, T.; Cohard, J.; Gascon, T.; Gibon, F.; Mialon, A.; Galle, S.; Peugeot, C.; Seguis, L. Assimilation of SMOS soil moisture into a distributed hydrological model and impacts on the water cycle variables over the Ouémé catchment in Benin. Hydrol. Earth Syst. Sci. 2016, 20, 2827–2840. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Mishra, A.K. Performance of AMSR_E soil moisture data assimilation in CLM4.5 model for monitoring hydrologic fluxes at global scale. J. Hydrol. 2017, 547, 67–79. [Google Scholar] [CrossRef]
- Sun, L.; Seidou, O.; Nistor, I.; Liu, K. Review of the Kalman-type hydrological data assimilation. Hydrol. Sci. J. 2016, 61, 2348–2366. [Google Scholar] [CrossRef]
- Sutanudjaja, E.H.; van Beek, L.P.H.; de Jong, S.M.; van Geer, F.C.; Bierkens, M.F.P. Calibrating a large-extent high-resolution coupled groundwater-land surface model using soil moisture and discharge data. Water Resour. Res. 2014, 50, 687–705. [Google Scholar] [CrossRef] [Green Version]
- Rajib, M.A.; Merwade, V.; Yu, Z. Multi-objective calibration of a hydrologic model using spatially distributed remotely sensed/in-situ soil moisture. J. Hydrol. 2016, 536, 192–207. [Google Scholar] [CrossRef] [Green Version]
- Silvestro, F.; Gabellani, S.; Rudari, R.; Delogu, F.; Laiolo, P.; Boni, G. Uncertainty reduction and parameter estimation of a distributed hydrological model with ground and remote-sensing data. Hydrol. Earth Syst. Sci. 2015, 19, 1727–1751. [Google Scholar] [CrossRef] [Green Version]
- Wanders, N.; Bierkens, M.F.P.; de Jong, S.M.; de Roo, A.; Karssenberg, D. The benefits of using remotely sensed soil moisture in parameter identification of large-scale hydrological models. Water Resour. Res. 2014, 50, 6874–6891. [Google Scholar] [CrossRef] [Green Version]
- Wanders, N.; Karssenberg, D.; de Roo, A.; de Jong, S.M.; Bierkens, M.F.P. The suitability of remotely sensed soil moisture for improving operational flood forecasting. Hydrol. Earth Syst. Sci. 2014, 18, 2343–2357. [Google Scholar] [CrossRef] [Green Version]
- Stisen, S.; Koch, J.; Sonnenborg, T.O.; Refsgaard, J.C.; Bircher, S.; Ringgaard, R.; Jensen, K.H. Moving beyond run-off calibration-Multivariable optimization of a surface-subsurface-atmosphere model. Hydrol. Process. 2018, 32, 2654–2668. [Google Scholar] [CrossRef]
- Yassin, F.; Razavi, S.; Wheater, H.; Sapriza-Azuri, G.; Davison, B.; Pietroniro, A. Enhanced identification of a hydrologic model using streamflow and satellite water storage data: A multicriteria sensitivity analysis and optimization approach. Hydrol. Process. 2017, 31, 3320–3333. [Google Scholar] [CrossRef]
- Xiong, L.; Guo, S.; Tian, X. DEM-based distributed hydrological model and its application. Adv. Water Sci. 2004, 15, 517–520. (In Chinese) [Google Scholar]
- Xiong, L.; Guo, S. Distributed Watershed Hydrological Model; China Water Power Press: Beijing, China, 2004. (In Chinese) [Google Scholar]
- Long, H.; Xiong, L.; Wan, M. Application of DEM-based distributed hydrological model in Qingjiang river basin. Resour. Environ. Yangtze Basin 2012, 21, 71–78. (In Chinese) [Google Scholar]
- Zeng, L.; Xiong, L.; Yang, H. Comparison of Soil Moisture Sensed Remotely and Simulated by Hydrological Model in the Xijiang Basin. J. Water Resour. Res. 2018, 7, 339–350. (In Chinese) [Google Scholar]
- Entekhabi, D.; Das, N.; Njoku, E.G.; Jackson, T.J.; Shi, J.C. SMAP L3 Radar/Radiometer Global Daily 9 km EASE-Grid Soil Moisture; National Snow and Ice Data Center: Boulder, CO, USA, 2015. [Google Scholar]
- Blaney, H.F.; Criddle, W.D. Determining Consumptive Use and Irrigation Water Requirements; US Department of Agriculture: Washington, DC, USA, 1962.
- Bartier, P.M.; Keller, C.P. Multivariate interpolation to incorporate thematic surface data using inverse distance weighting (IDW). Comput. Geosci. 1996, 22, 795–799. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology. Hydrol. Sci. J. 1979, 24, 43–69. [Google Scholar] [CrossRef]
- Wagner, W.; Lemoine, G.; Rott, H. A Method for Estimating Soil Moisture from ERS Scatterometer and Soil Data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Gupta, H.V.; Kling, H.; Yilmaz, K.K.; Martinez, G.F. Decomposition of the mean squared error and NSE performance criteria: Implications for improving hydrological modelling. J. Hydrol. 2009, 377, 80–91. [Google Scholar] [CrossRef] [Green Version]
- Duan, Q.; Sorooshian, S.; Gupta, V. Effective and efficient global optimization for conceptual rainfall-runoff models. Water Resour. Res. 1992, 28, 1015–1031. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Unit | Prior Range |
|---|---|---|---|
| S0 | Minimum water storage capacity | mm | 1–200 |
| SM | Variation range of water storage capacity across the catchment | mm | 1–600 |
| TS | Time constant that determines the velocity of groundwater flow | h | 1–300 |
| TP | Time constant that determines the velocity of surface flow | h | 1–300 |
| α | Empirical constant describing the characteristic of groundwater flow | - | 0–1 |
| b | Empirical constant describing the impact of cell slope on the celerity of groundwater flow | - | 0–1 |
| n | Empirical constant describing the relationship between SMC and the corresponding topographic index | - | 0–1 |
| c0 | Muskingum parameter for runoff routing within a sub-catchment | - | 0–1 |
| c1 | Muskingum parameter for runoff routing within a sub-catchment | - | 0–1 |
| hc0 | Muskingum parameter in association with river channel routing | - | 0–1 |
| hc1 | Muskingum parameter in association with river channel routing | - | 0–1 |
| Catchment | w | Calibration Period | Validation Period | ||
|---|---|---|---|---|---|
| KGEQ | KGESM | KGEw | KGEQ | ||
| QJ | 0 | 0.885 | 0.483 | 0.885 | 0.796 |
| 0.1 | 0.884 | 0.497 | 0.845 | 0.802 | |
| 0.2 | 0.883 | 0.504 | 0.807 | 0.806 | |
| 0.3 | 0.881 | 0.511 | 0.771 | 0.810 | |
| 0.4 | 0.878 | 0.516 | 0.733 | 0.813 | |
| 0.5 | 0.876 | 0.518 | 0.697 | 0.816 | |
| 0.6 | 0.871 | 0.522 | 0.661 | 0.819 | |
| 0.7 | 0.866 | 0.524 | 0.627 | 0.821 | |
| 0.8 | 0.864 | 0.524 | 0.592 | 0.821 | |
| 0.9 | 0.853 | 0.528 | 0.561 | 0.822 | |
| 1.0 | - | 0.529 | - | - | |
| GJ | 0 | 0.905 | 0.772 | 0.905 | 0.826 |
| 0.1 | 0.901 | 0.784 | 0.889 | 0.824 | |
| 0.2 | 0.899 | 0.788 | 0.877 | 0.822 | |
| 0.3 | 0.904 | 0.788 | 0.869 | 0.817 | |
| 0.4 | 0.913 | 0.788 | 0.863 | 0.815 | |
| 0.5 | 0.901 | 0.789 | 0.845 | 0.812 | |
| 0.6 | 0.895 | 0.789 | 0.831 | 0.809 | |
| 0.7 | 0.901 | 0.790 | 0.823 | 0.798 | |
| 0.8 | 0.898 | 0.791 | 0.812 | 0.794 | |
| 0.9 | 0.893 | 0.792 | 0.802 | 0.779 | |
| 1.0 | - | 0.792 | - | - | |
| Catchment | w | Optimal Parameter Value | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S0 | SM | TS | TP | α | b | n | c0 | c1 | hc0 | hc1 | ||
| QJ | 0 | 144.3 | 491.7 | 252.7 | 28.6 | 0.66 | 0.001 | 0.989 | 0.993 | 0.003 | 0.828 | 0.091 |
| 0.1 | 138.8 | 481.2 | 254.5 | 28.4 | 0.65 | 0.001 | 0.977 | 0.993 | 0.004 | 0.804 | 0.102 | |
| 0.2 | 131.4 | 482.9 | 254.1 | 28.4 | 0.64 | 0.001 | 0.965 | 0.994 | 0.003 | 0.788 | 0.103 | |
| 0.3 | 120.9 | 491.4 | 247.4 | 28.5 | 0.63 | 0.001 | 0.956 | 0.993 | 0.003 | 0.789 | 0.102 | |
| 0.4 | 112.3 | 465.9 | 246.6 | 28.4 | 0.62 | 0.001 | 0.899 | 0.992 | 0.003 | 0.830 | 0.105 | |
| 0.5 | 116.6 | 472.6 | 243.8 | 18.5 | 0.61 | 0.001 | 0.971 | 0.991 | 0.004 | 0.783 | 0.108 | |
| 0.6 | 107.9 | 439.1 | 222.4 | 19.1 | 0.61 | 0.001 | 0.909 | 0.989 | 0.005 | 0.829 | 0.105 | |
| 0.7 | 101.0 | 456.9 | 206.0 | 19.8 | 0.61 | 0.001 | 0.913 | 0.992 | 0.004 | 0.759 | 0.112 | |
| 0.8 | 101.1 | 497.5 | 213.7 | 25.1 | 0.59 | 0.001 | 0.961 | 0.993 | 0.003 | 0.739 | 0.135 | |
| 0.9 | 89.1 | 393.4 | 175.8 | 23.8 | 0.61 | 0.001 | 0.813 | 0.987 | 0.005 | 0.754 | 0.142 | |
| 1.0 | 95.7 | 395.4 | 172.2 | 24.3 | 0.61 | 0.001 | 0.842 | - | - | - | - | |
| GJ | 0 | 198.8 | 473.0 | 231.3 | 176.5 | 0.33 | 0.366 | 0.838 | 0.998 | 0.001 | 0.970 | 0.025 |
| 0.1 | 196.3 | 499.1 | 299.3 | 177.1 | 0.19 | 0.286 | 0.903 | 0.998 | 0.001 | 0.949 | 0.034 | |
| 0.2 | 199.8 | 488.5 | 189.0 | 183.7 | 0.22 | 0.427 | 0.860 | 0.998 | 0.001 | 0.925 | 0.031 | |
| 0.3 | 195.7 | 488.9 | 293.7 | 160.2 | 0.15 | 0.307 | 0.840 | 0.997 | 0.001 | 0.949 | 0.027 | |
| 0.4 | 199.1 | 497.1 | 298.6 | 154.1 | 0.16 | 0.323 | 0.732 | 0.998 | 0.001 | 0.959 | 0.021 | |
| 0.5 | 198.4 | 499.5 | 191.3 | 186.9 | 0.39 | 0.429 | 0.850 | 0.998 | 0.001 | 0.924 | 0.041 | |
| 0.6 | 199.5 | 492.8 | 177.2 | 181.3 | 0.38 | 0.456 | 0.890 | 0.998 | 0.001 | 0.930 | 0.061 | |
| 0.7 | 199.2 | 485.5 | 196.3 | 185.4 | 0.36 | 0.425 | 0.842 | 0.998 | 0.001 | 0.899 | 0.081 | |
| 0.8 | 199.1 | 482.4 | 187.1 | 191.8 | 0.21 | 0.467 | 0.789 | 0.998 | 0.001 | 0.916 | 0.027 | |
| 0.9 | 199.8 | 480.4 | 185.8 | 194.3 | 0.12 | 0.452 | 0.857 | 0.997 | 0.001 | 0.931 | 0.034 | |
| 1.0 | 199.9 | 478.5 | 192.7 | 192.2 | 0.08 | 0.437 | 0.832 | - | - | - | - | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, L.; Zeng, L. Impacts of Introducing Remote Sensing Soil Moisture in Calibrating a Distributed Hydrological Model for Streamflow Simulation. Water 2019, 11, 666. https://doi.org/10.3390/w11040666
Xiong L, Zeng L. Impacts of Introducing Remote Sensing Soil Moisture in Calibrating a Distributed Hydrological Model for Streamflow Simulation. Water. 2019; 11(4):666. https://doi.org/10.3390/w11040666
Chicago/Turabian StyleXiong, Lihua, and Ling Zeng. 2019. "Impacts of Introducing Remote Sensing Soil Moisture in Calibrating a Distributed Hydrological Model for Streamflow Simulation" Water 11, no. 4: 666. https://doi.org/10.3390/w11040666
APA StyleXiong, L., & Zeng, L. (2019). Impacts of Introducing Remote Sensing Soil Moisture in Calibrating a Distributed Hydrological Model for Streamflow Simulation. Water, 11(4), 666. https://doi.org/10.3390/w11040666