MR-WC-MPS: A Multi-Resolution WC-MPS Method for Simulation of Free-Surface Flows


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fundamentals of the MPS Method
2.1. Governing Equations
2.2. MPS Interpolations
2.3. Solution Method
2.4. Weakly Compressible Model
2.5. Boundary Treatment
3. Multi-Resolution MPS Method
3.1. Calculation of Kernel Function
3.2. Calculation of Particle Number Density
3.3. Solution Method
4. Results and Discussion
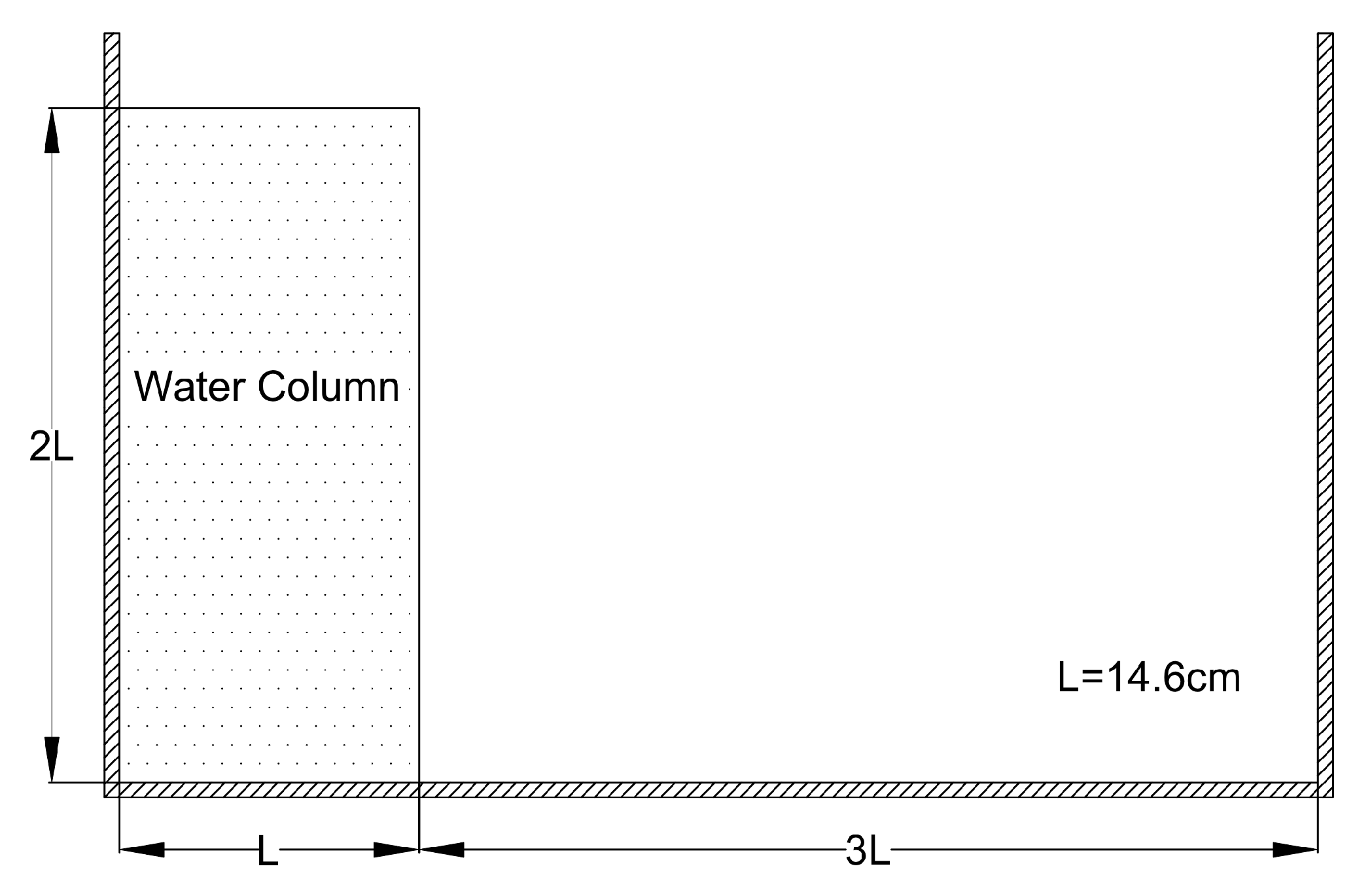
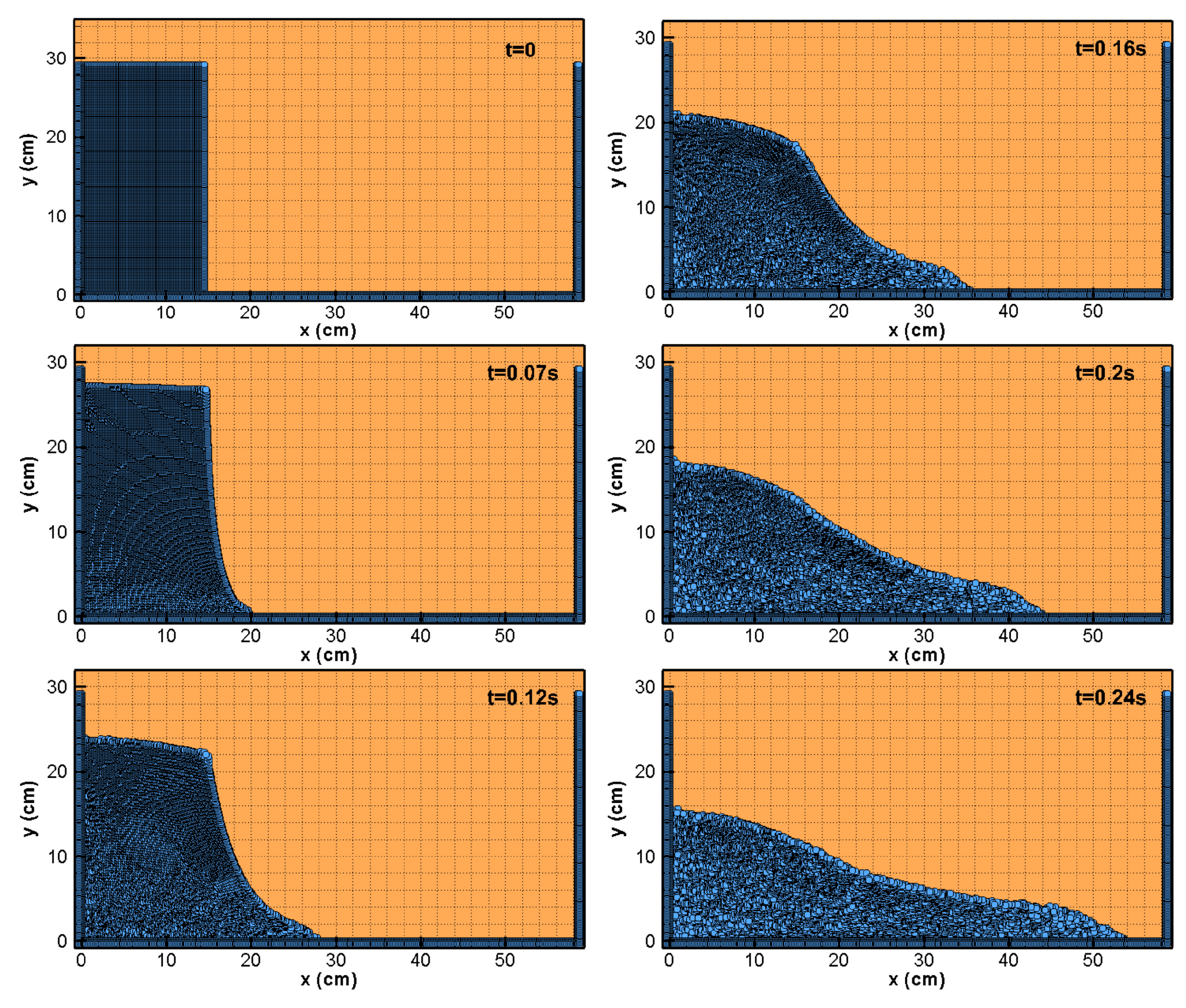
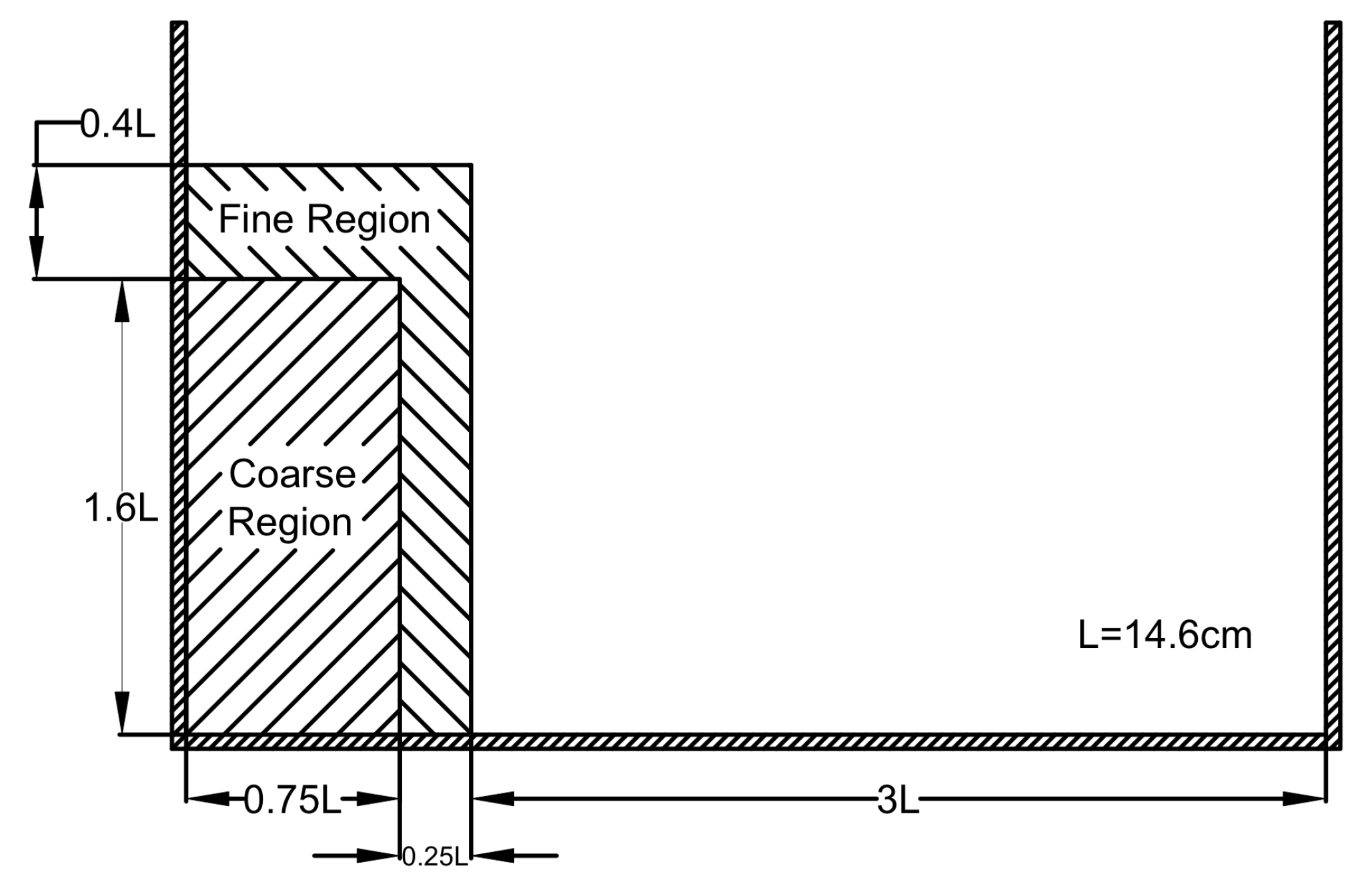
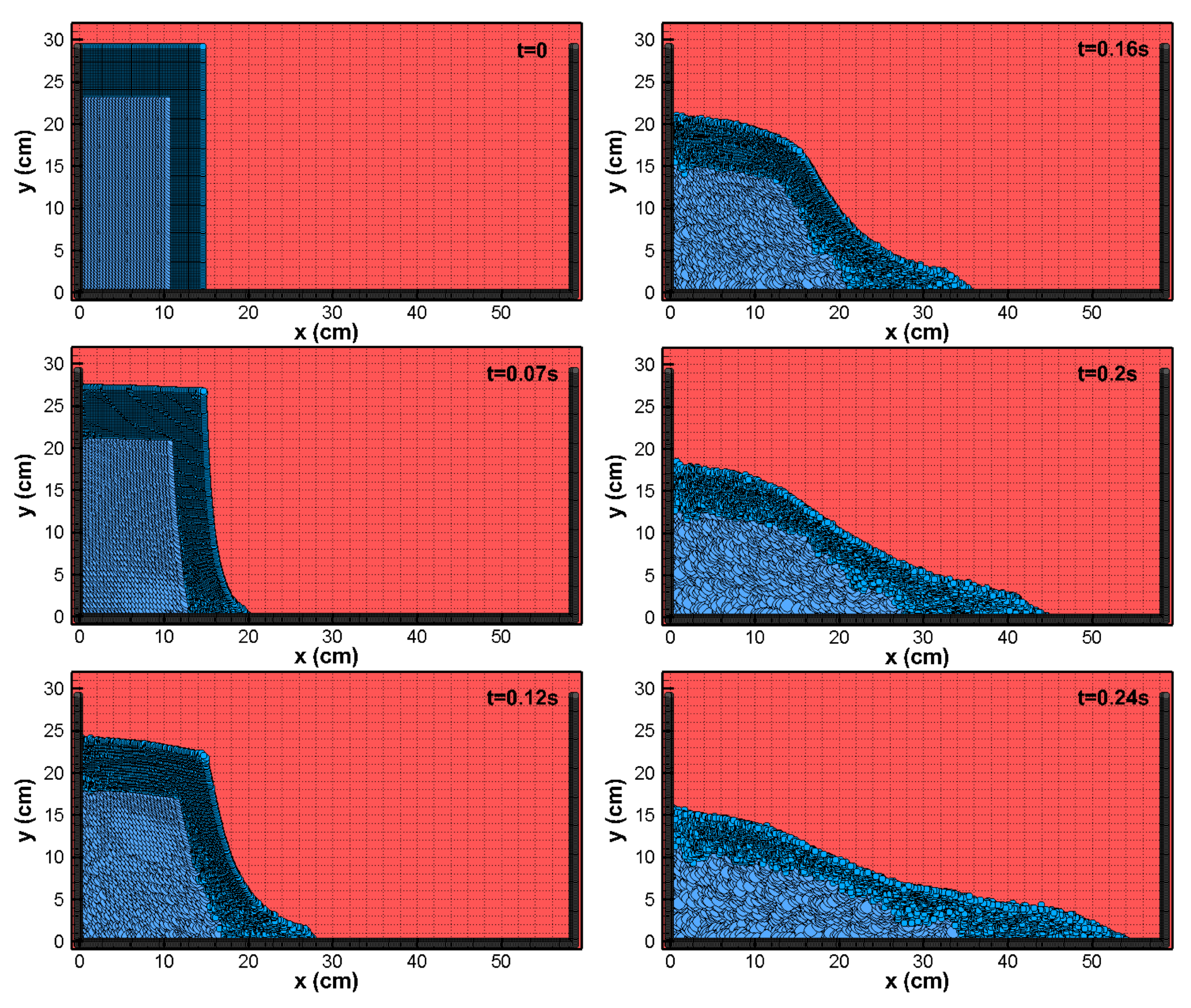
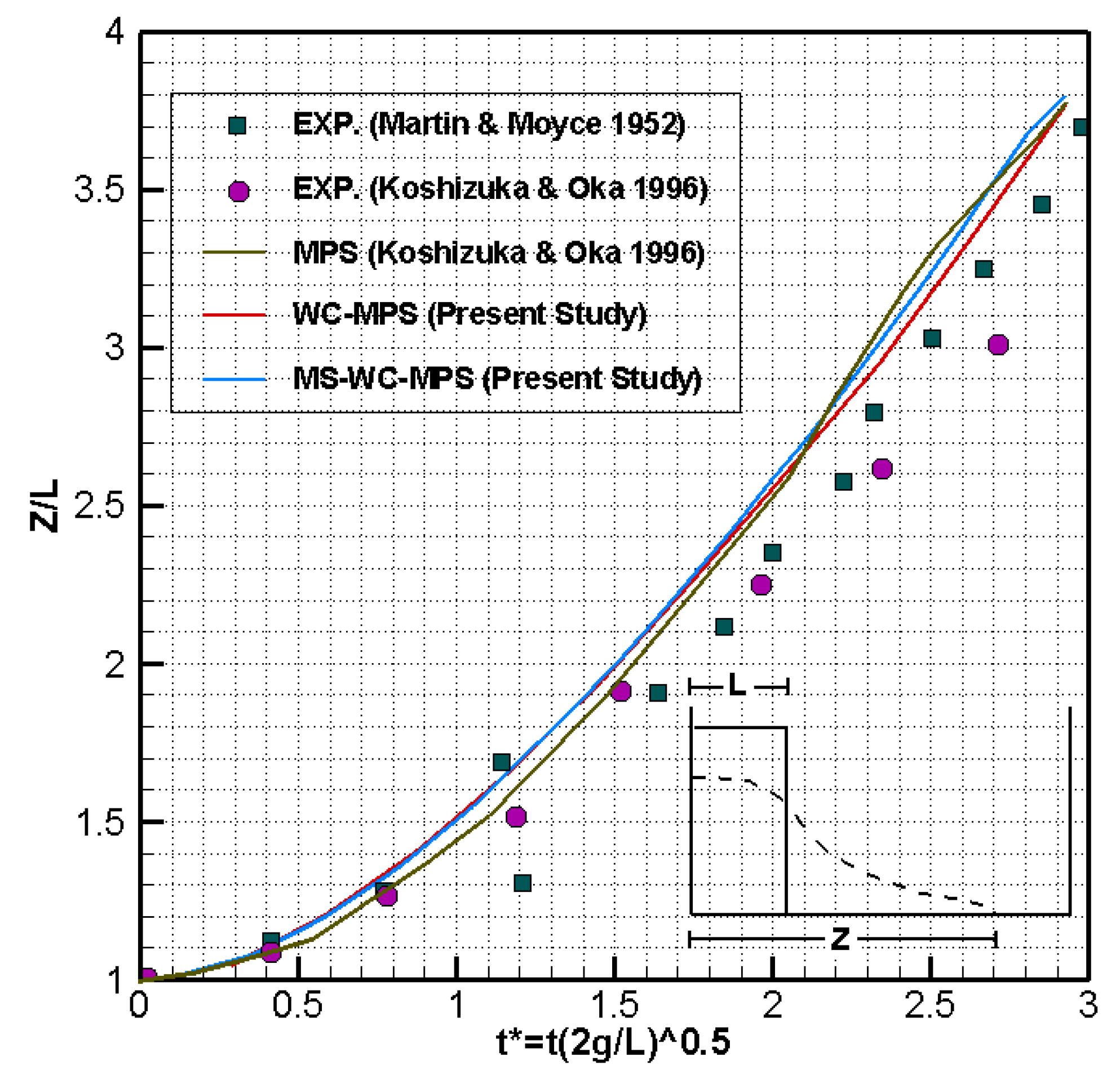
4.1. Dam-Break-Induced Water Waves
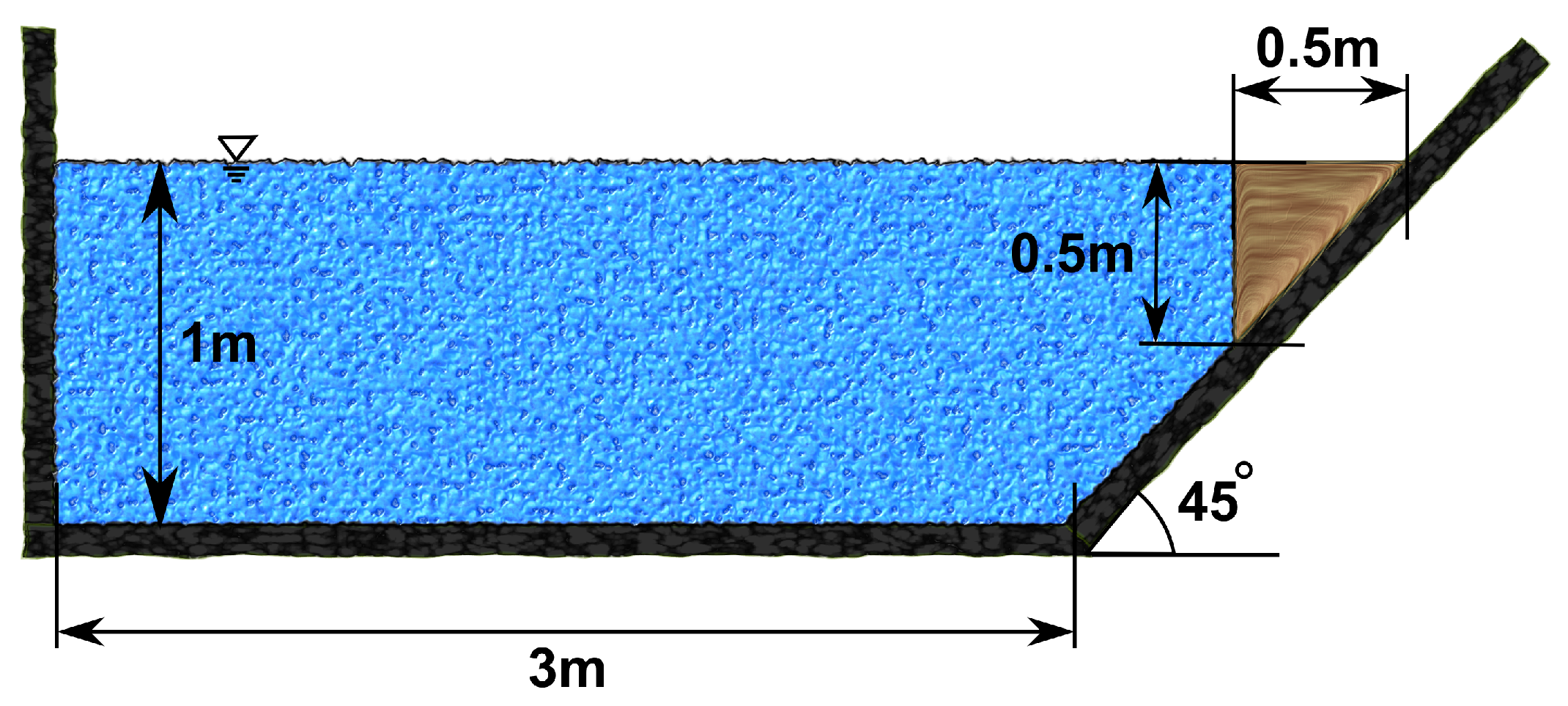
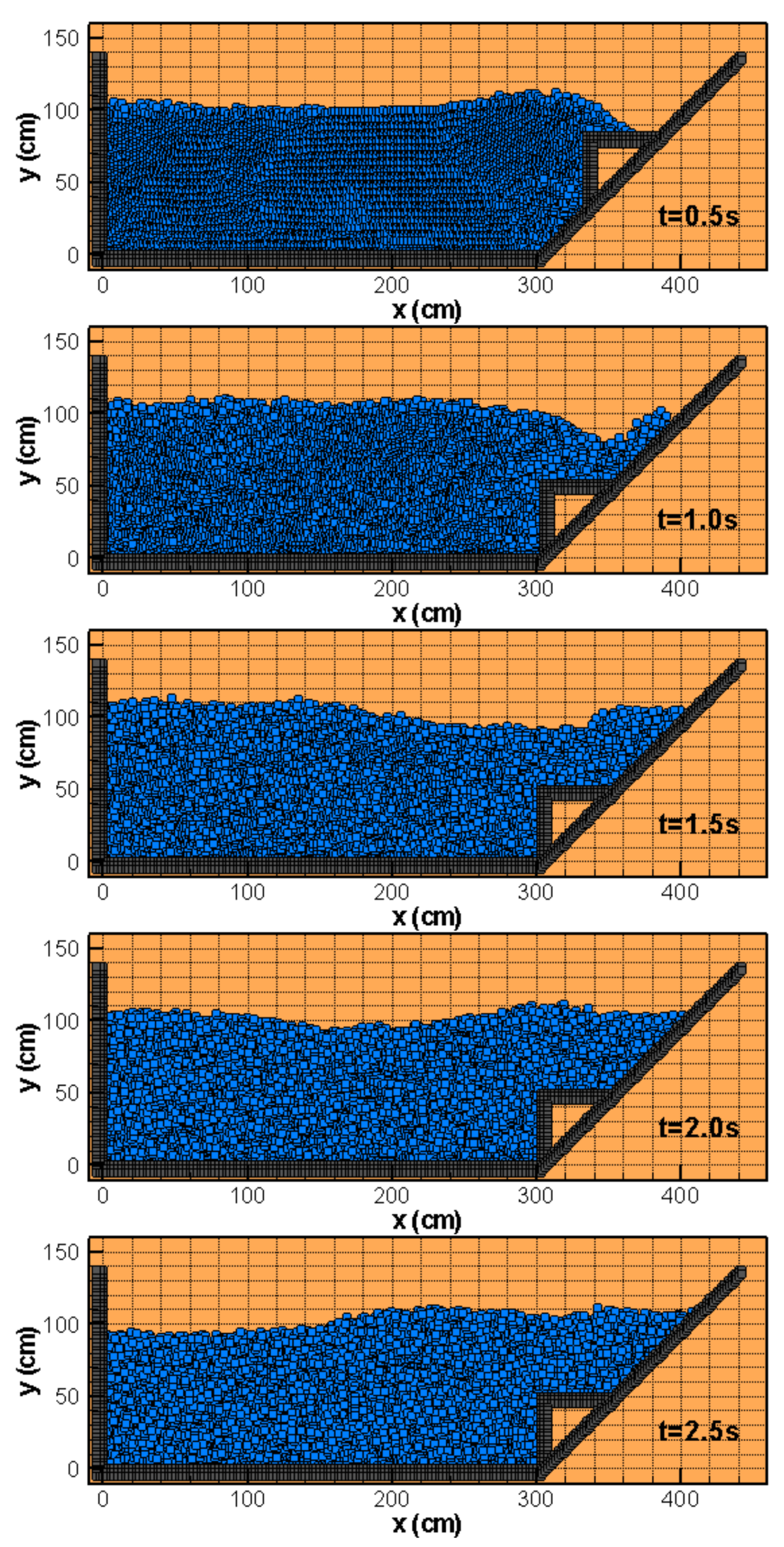
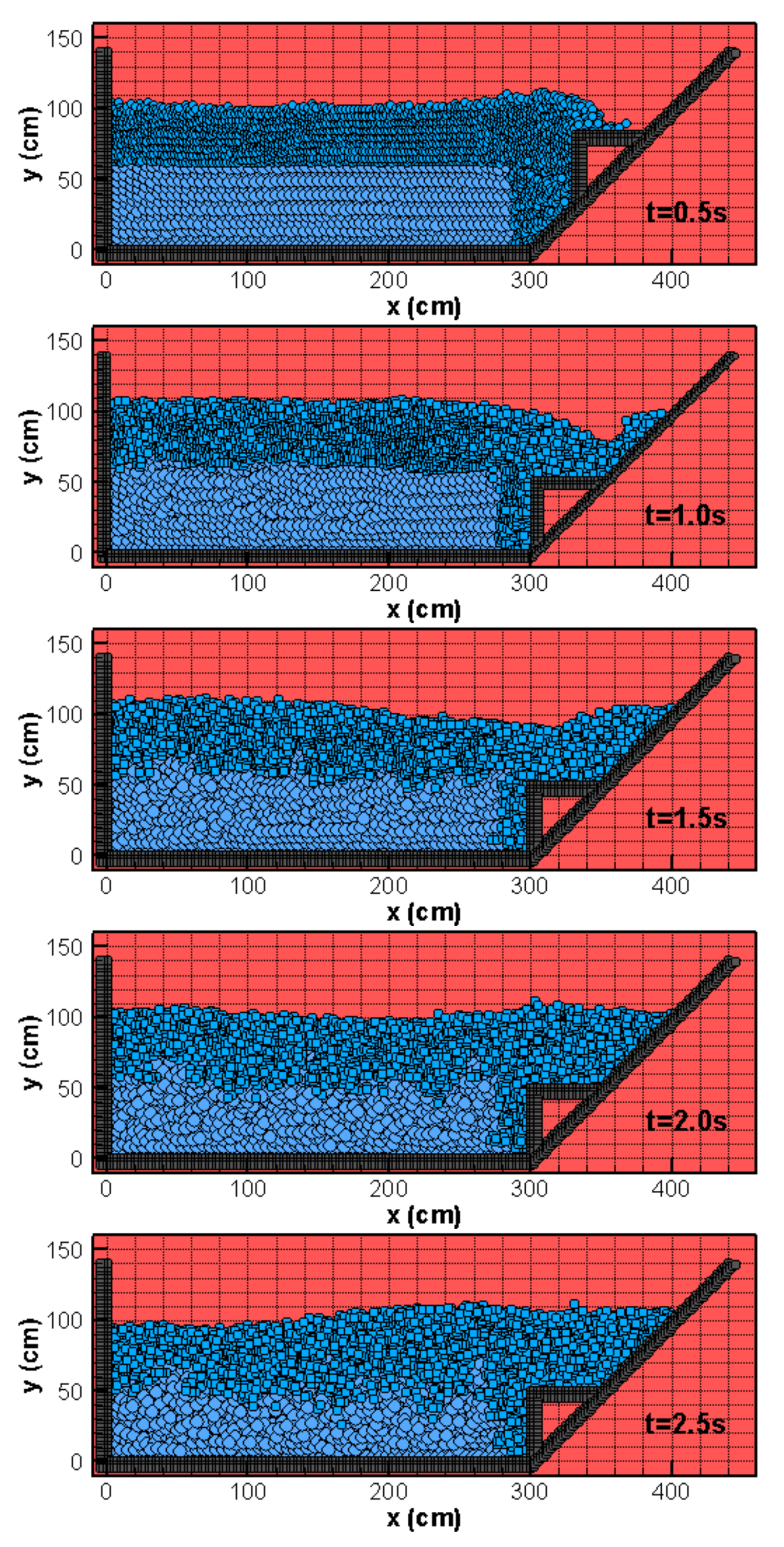
4.2. Landslide-Induced Water Waves
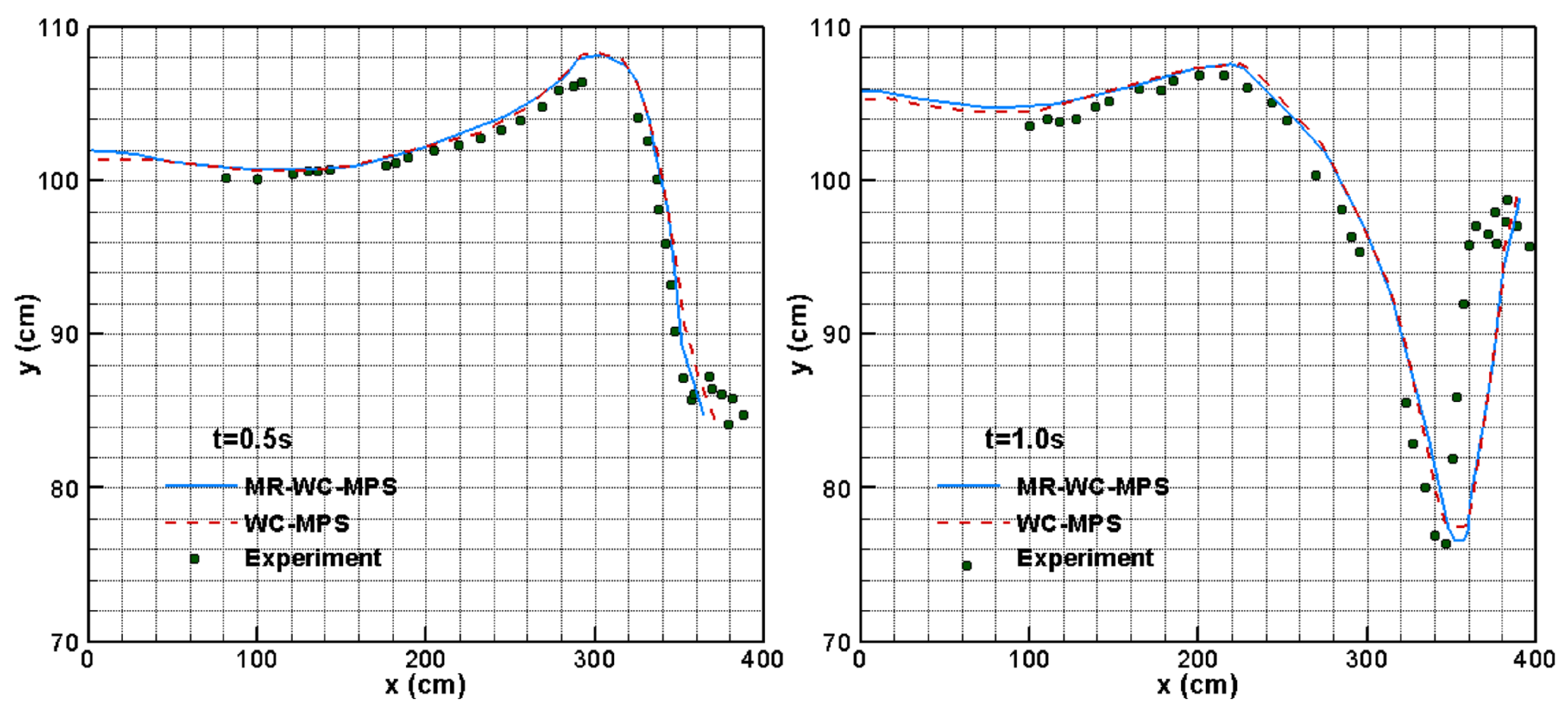
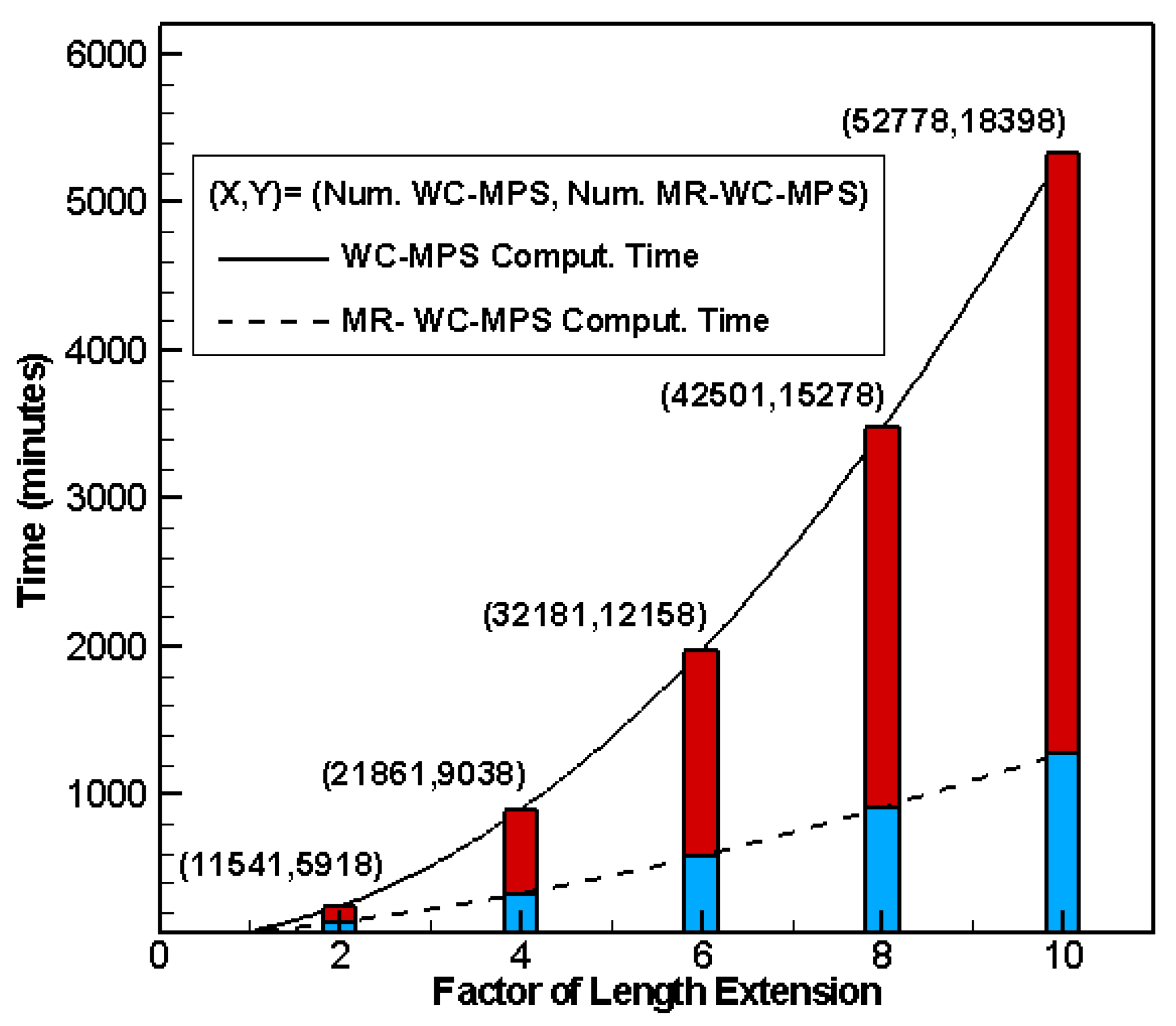
4.3. Landslide-Induced Water Waves over Extended Tank
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Larroude, P.; Oudart, T. SPH model to simulate movement of grass meadow of posidonia under waves. Coastal Eng. Proc. 2012, 1, 56. [Google Scholar] [CrossRef]
- Koshizuka, S.; Oka, Y. Moving-particle semi-implicit method for fragmentation of incompressible fluid. Nucl. Sci. Eng. 1996, 123, 421–434. [Google Scholar] [CrossRef]
- Koshizuka, S.; Nobe, A.; Oka, Y. Numerical analysis of breaking waves using the moving particle semi-implicit method. Int. J. Numer. Meth. Fluids 1998, 26, 751–769. [Google Scholar] [CrossRef]
- Koshizuka, S.; Shibata, K.; Kondo, M.; Matsunaga, T. Moving Particle Semi-implicit Method: A Meshfree Particle Method for Fluid Dynamics; Academic Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Hori, C.; Gotoh, H.; Ikari, H.; Khayyer, A. GPU-acceleration for moving particle semi-implicit method. Comput. Fluids 2011, 51, 174–183. [Google Scholar] [CrossRef]
- Nodoushan, E.J.; Shakibaeinia, A. Multiphase mesh-free particle modeling of local sediment scouring with μ (I) rheology. J. Hydroinf. 2019, 21, 279–294. [Google Scholar] [CrossRef]
- Nabian, M.A.; Farhadi, L. Multiphase Mesh-Free Particle Method for Simulating Granular Flows and Sediment Transport. J. Hydraul. Eng. 2016, 143, 04016102. [Google Scholar] [CrossRef]
- Harada, E.; Ikari, H.; Khayyer, A.; Gotoh, H. Numerical simulation for swash morphodynamics by DEM–MPS coupling model. Coastal Eng. J. 2019, 61, 2–14. [Google Scholar] [CrossRef]
- Kim, K. A Mesh-Free Particle Method for Simulation of Mobile-Bed Behavior Induced by Dam Break. Appl. Sci. 2018, 8, 1070. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. Modified moving particle semi-implicit methods for the prediction of 2D wave impact pressure. Coastal Eng. 2009, 56, 419–440. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H.; Falahaty, H.; Shimizu, Y. Towards development of enhanced fully-Lagrangian mesh-free computational methods for fluid-structure interaction. J. Hydrodyn. 2018, 30, 49–61. [Google Scholar] [CrossRef]
- Fu, L.; Jin, Y.c. Macroscopic particle method for channel flow over porous bed. Eng. Appl. Comput. Fluid Mech. 2018, 12, 13–27. [Google Scholar] [CrossRef]
- Lee, B.H.; Park, J.C.; Kim, M.H.; Hwang, S.C. Step-by-step improvement of MPS method in simulating violent free-surface motions and impact-loads. Comput. Methods Appl. Mech. Eng. 2011, 200, 1113–1125. [Google Scholar] [CrossRef]
- Wang, L.; Jiang, Q.; Zhang, C. Improvement of moving particle semi-implicit method for simulation of progressive water waves. Int. J. Numer. Methods Fluids 2017, 85, 69–89. [Google Scholar] [CrossRef]
- Tajnesaie, M.; Shakibaeinia, A.; Hosseini, K. Meshfree particle numerical modelling of sub-aerial and submerged landslides. Comput. Fluids 2018, 172, 109–121. [Google Scholar] [CrossRef]
- Nodoushan, E.J.; Shakibaeinia, A.; Hosseini, K. A multiphase meshfree particle method for continuum-based modeling of dry and submerged granular flows. Powder Technol. 2018, 335, 258–274. [Google Scholar] [CrossRef]
- Duan, G.; Chen, B.; Zhang, X.; Wang, Y. A multiphase MPS solver for modeling multi-fluid interaction with free surface and its application in oil spill. Comput. Meth. Appl. Mech. Eng. 2017, 320, 133–161. [Google Scholar] [CrossRef] [Green Version]
- Gotoh, H.; Khayyer, A. On the state-of-the-art of particle methods for coastal and ocean engineering. Coastal Eng. J. 2018, 60, 79–103. [Google Scholar] [CrossRef]
- Shibata, K.; Koshizuka, S. Numerical analysis of shipping water impact on a deck using a particle method. Ocean Eng. 2007, 34, 585–593. [Google Scholar] [CrossRef]
- Nabian, M.A.; Farhadi, L. Numerical simulation of solitary wave using the fully Lagrangian method of moving particle semi implicit. In Proceedings of the American Society of Mechanical Engineers (ASME), Chicago, IL, USA, 3–7 August 2014. [Google Scholar]
- Nabian, M.A.; Farhadi, L. Stable moving particle semi implicit method for modeling waves generated by submarine landslides. In Proceedings of the American Society of Mechanical Engineers (ASME), International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2014. [Google Scholar]
- Yuhashi, N.; Matsuda, I.; Koshizuka, S. Calculation and validation of stirring resistance in cam-shaft rotation using the moving particle semi-implicit method. J. Fluid Sci. Technol. 2016, 11, JFST0018. [Google Scholar] [CrossRef]
- Zheng, H.; Shioya, R.; Mitsume, N. Large-Scale Parallel Simulation of Coastal Structures Loaded by Tsunami Wave Using FEM and MPS Method. J. Adv. Simul. Sci. Eng. 2018, 5, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.x.; Sun, Z.g.; Sun, Y.j.; Chen, X.; Xi, G. Numerical Investigation of Liquid Dispersion by Hydrophobic/Hydrophilic Mesh Packing Using Particle Method. Chem. Eng. Sci. 2019, 202, 447–461. [Google Scholar] [CrossRef]
- Sun, Z.; Xi, G.; Chen, X. A numerical study of stir mixing of liquids with particle method. Chem. Eng. Sci. 2009, 64, 341–350. [Google Scholar] [CrossRef]
- Gambaruto, A.M. Computational haemodynamics of small vessels using the moving particle semi-implicit (MPS) method. J. Comput. Phys. 2015, 302, 68–96. [Google Scholar] [CrossRef]
- Ahmadian, M.; Firoozbakhsh, K.; Hasanian, M. Simulation of red blood cell motion in microvessels using modified moving particle semi-implicit method. Sci. Iranica 2012, 19, 113–118. [Google Scholar] [CrossRef] [Green Version]
- Shakibaeinia, A.; Jin, Y.C. A weakly compressible MPS method for modeling of open-boundary free-surface flow. Int. J. Numer. Methods Fluids 2010, 63, 1208–1232. [Google Scholar] [CrossRef]
- Shakibaeinia, A.; Jin, Y.C. MPS-based mesh-free particle method for modeling open-channel flows. J. Hydraul. Eng. 2011, 137, 1375–1384. [Google Scholar] [CrossRef]
- Jafari-Nodoushan, E.; Hosseini, K.; Shakibaeinia, A.; Mousavi, S.F. Meshless particle modelling of free surface flow over spillways. J. Hydroinf. 2016, 18, 354–370. [Google Scholar] [CrossRef]
- Chen, X.; Sun, Z.G.; Liu, L.; Xi, G. Improved MPS method with variable-size particles. Int. J. Numer. Methods Fluids 2016, 80, 358–374. [Google Scholar] [CrossRef]
- Tanaka, M.; Cardoso, R.; Bahai, H. Multi-resolution MPS method. J. Comput. Phys. 2018, 359, 106–136. [Google Scholar] [CrossRef]
- Ataie-Ashtiani, B.; Farhadi, L. A stable moving-particle semi-implicit method for free surface flows. Fluid Dyn. Res. 2006, 38, 241–256. [Google Scholar] [CrossRef]
- Watts, P. Water Waves Generated by Underwater Landslides. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 1997. [Google Scholar]
- Enet, F.; Grilli, S.T. Experimental study of tsunami generation by three-dimensional rigid underwater landslides. J. Waterw. Port Coastal Ocean Eng. 2007, 133, 442–454. [Google Scholar] [CrossRef]
- Didenkulova, I.; Nikolkina, I.; Pelinovsky, E.; Zahibo, N. Tsunami waves generated by submarine landslides of variable volume: analytical solutions for a basin of variable depth. Nat. Hazards Earth Syst. Sci. 2010, 10, 2407. [Google Scholar] [CrossRef]
- Ataie-Ashtiani, B.; Shobeyri, G. Numerical simulation of landslide impulsive waves by incompressible smoothed particle hydrodynamics. Int. J. Numer. Methods Fluids 2008, 56, 209–232. [Google Scholar] [CrossRef]
- Capone, T.; Panizzo, A.; Monaghan, J.J. SPH modelling of water waves generated by submarine landslides. J. Hydraul. Res. 2010, 48, 80–84. [Google Scholar] [CrossRef]
- Nabian, M.A. An Efficient Mesh-free Particle Method for Modeling of Free Surface and Multiphase Flows. Ph.D. Thesis, The George Washington University, Washington, DC, USA, 2015. [Google Scholar]
- Monaghan, J.J. Simulating free surface flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Martin, J.; Moyce, W. Part IV. An experimental study of the collapse of liquid columns on a rigid horizontal plane. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Sci. 1952, 244, 312–324. [Google Scholar] [CrossRef]
- Chow, A.D.; Rogers, B.D.; Lind, S.J.; Stansby, P.K. Incompressible SPH (ISPH) with fast Poisson solver on a GPU. Comput. Phys. Commun. 2018, 226, 81–103. [Google Scholar] [CrossRef]
- Masson, D.; Harbitz, C.; Wynn, R.; Pedersen, G.; Løvholt, F. Submarine landslides: Processes, triggers and hazard prediction. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2006, 364, 2009–2039. [Google Scholar] [CrossRef]
- Heinrich, P. Nonlinear water waves generated by submarine and aerial landslides. J. Waterw. Port Coast. Ocean Eng. 1992, 118, 249–266. [Google Scholar] [CrossRef]
- Grilli, S.T.; Watts, P. Modeling of waves generated by a moving submerged body. Applications to underwater landslides. Eng. Anal. Bound. Elem. 1999, 23, 645–656. [Google Scholar] [CrossRef]














© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nabian, M.A.; Farhadi, L. MR-WC-MPS: A Multi-Resolution WC-MPS Method for Simulation of Free-Surface Flows. Water 2019, 11, 1349. https://doi.org/10.3390/w11071349
Nabian MA, Farhadi L. MR-WC-MPS: A Multi-Resolution WC-MPS Method for Simulation of Free-Surface Flows. Water. 2019; 11(7):1349. https://doi.org/10.3390/w11071349
Chicago/Turabian StyleNabian, Mohammad Amin, and Leila Farhadi. 2019. "MR-WC-MPS: A Multi-Resolution WC-MPS Method for Simulation of Free-Surface Flows" Water 11, no. 7: 1349. https://doi.org/10.3390/w11071349
APA StyleNabian, M. A., & Farhadi, L. (2019). MR-WC-MPS: A Multi-Resolution WC-MPS Method for Simulation of Free-Surface Flows. Water, 11(7), 1349. https://doi.org/10.3390/w11071349