Groundwater Recharge Prediction Using Linear Regression, Multi-Layer Perception Network, and Deep Learning




Abstract
:1. Introduction
2. Datasets
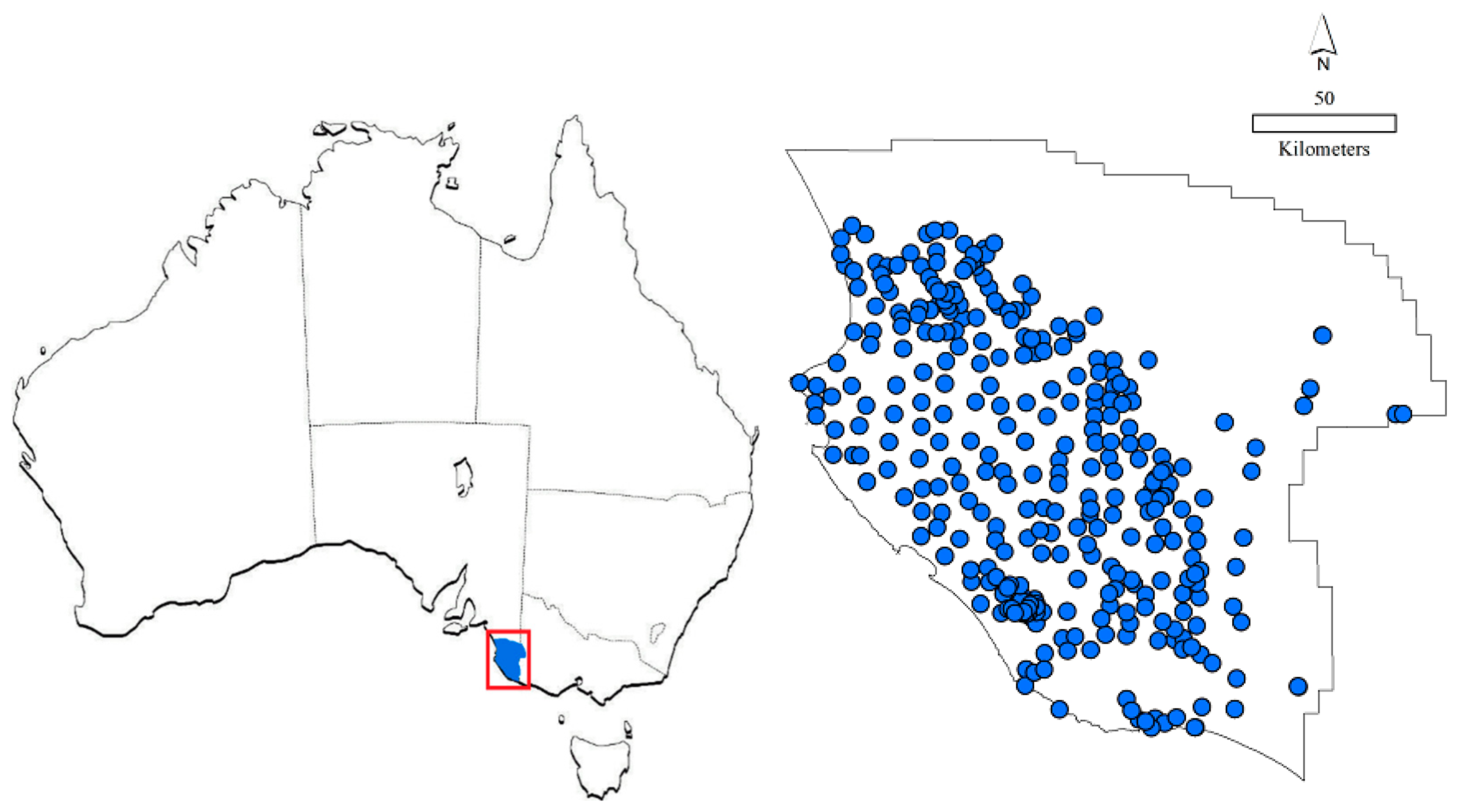
2.1. Study Area
2.2. Groundwater Recharge and Potential Variable Datasets
3. Methods
3.1. Linear Regression
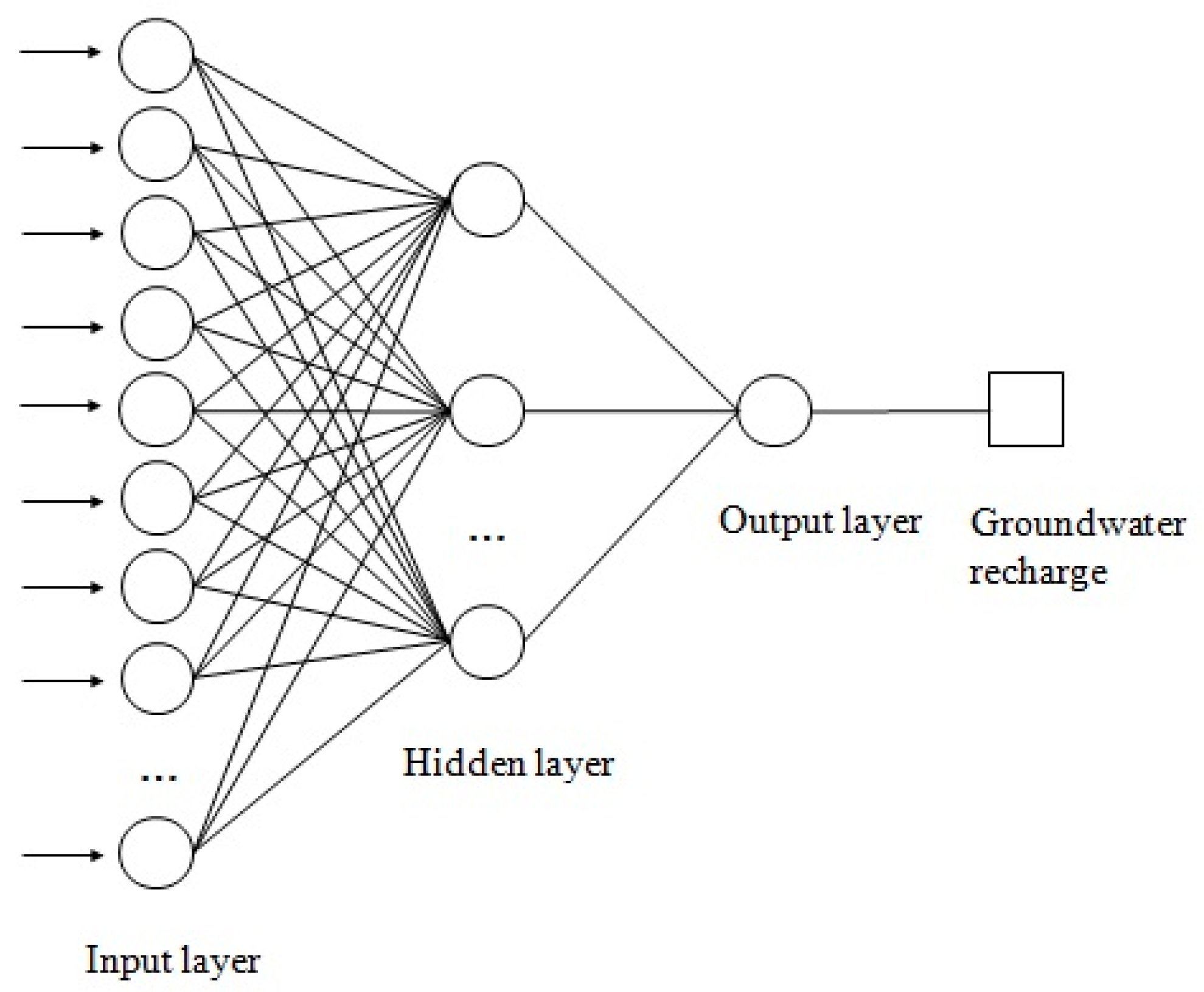
3.2. Multi-Layer Perception Network
3.3. LSTM Model for Regression
3.4. Model Testing and Comparison
4. Results
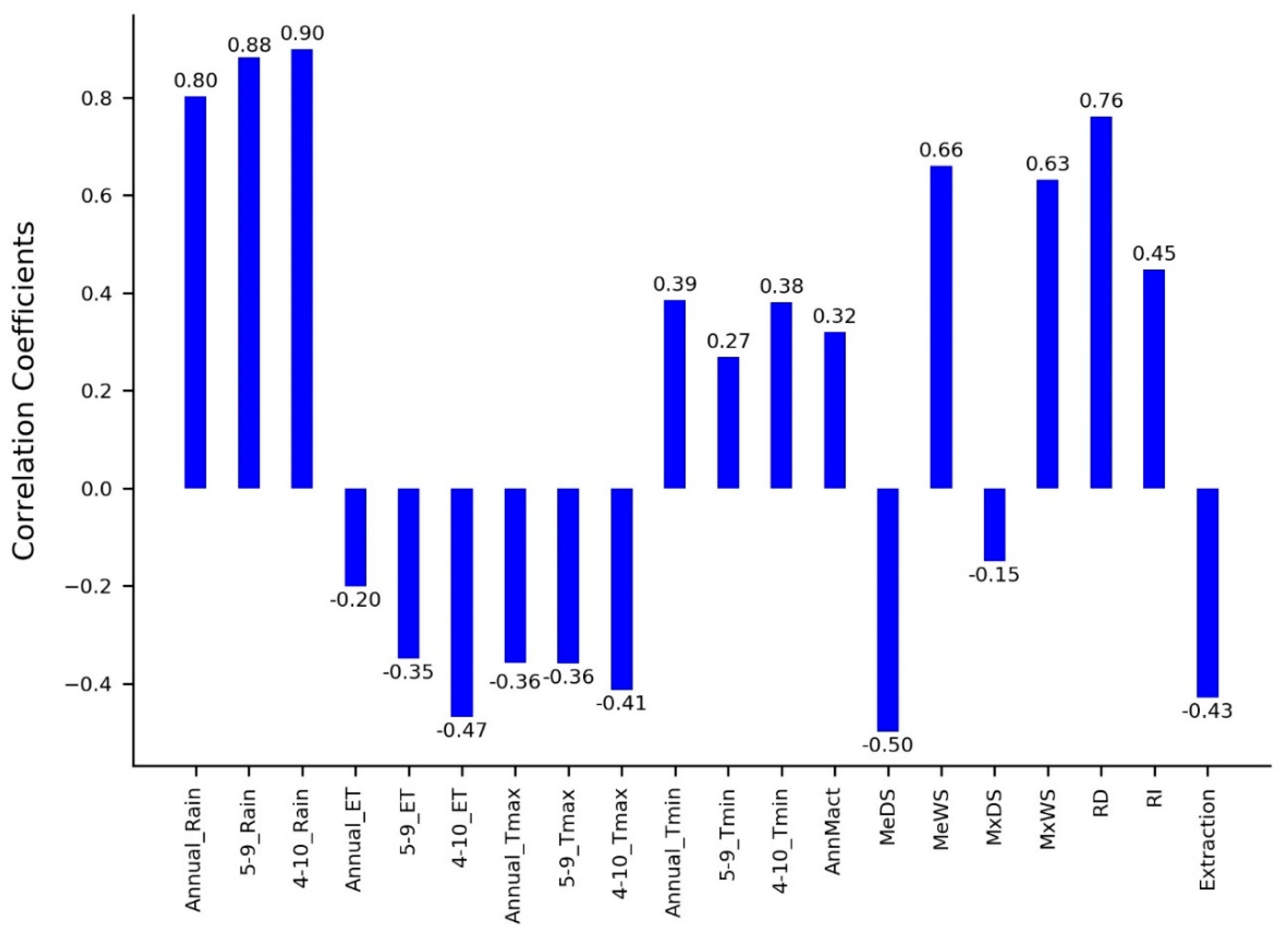
4.1. Correlation Coefficients between Potential Variables and Groundwater Recharge
4.2. Temporal Prediction of Groundwater Recharge
4.3. Relative Importance of Influential Predictors
5. Discussion
5.1. Performance and Comparison of Models
5.2. Influential Predictors Identification
5.3. Implications for Groundwater Management
5.4. Advantages, Limitations and Further Research
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Crosbie, R.S.; Jolly, I.D.; Leaney, F.W.; Petheram, C. Can the dataset of field based recharge estimates in Australia be used to predict recharge in data-poor areas? Hydrol. Earth Syst. Sci. 2010, 14, 2023–2038. [Google Scholar] [CrossRef] [Green Version]
- Gao, L.; Connor, J.; Doble, R.; Ali, R.; McFarlane, D. Opportunity for pen-urban Perth groundwater trade. J. Hydrol. 2013, 496, 89–99. [Google Scholar] [CrossRef]
- Gleeson, T.; Wada, Y.; Bierkens, M.F.P.; van Beek, L.P.H. Water balance of global aquifers revealed by groundwater footprint. Nature 2012, 488, 197–200. [Google Scholar] [CrossRef] [PubMed]
- Crosbie, R.S.; Davies, P.; Harrington, N.; Lamontagne, S. Ground truthing groundwater-recharge estimates derived from remotely sensed evapotranspiration: A case in South Australia. Hydrogeol. J. 2015, 23, 335–350. [Google Scholar] [CrossRef]
- Gao, L.; Connor, J.D.; Dillon, P. The economics of groundwater replenishment for reliable urban water supply. Water 2014, 6, 1662–1670. [Google Scholar] [CrossRef]
- Gao, L.; Bryan, B.A. Finding pathways to national-scale land-sector sustainability. Nature 2017, 544, 217–222. [Google Scholar] [CrossRef] [PubMed]
- Crosbie, R.S.; Peeters, L.J.M.; Herron, N.; McVicar, T.R.; Herr, A. Estimating groundwater recharge and its associated uncertainty: Use of regression kriging and the chloride mass balance method. J. Hydrol. 2018, 561, 1063–1080. [Google Scholar] [CrossRef]
- Gebru, T.A.; Tesfahunegn, G.B. Chloride mass balance for estimation of groundwater recharge in a semi-arid catchment of northern Ethiopia. Hydrogeol. J. 2019, 27, 363–378. [Google Scholar] [CrossRef]
- Marei, A.; Khayat, S.; Weise, S.; Ghannam, S.; Sbaih, M.; Geyer, S. Estimating groundwater recharge using the chloride mass-balance method in the West Bank, Palestine. Hydrol. Sci. J. 2010, 55, 780–791. [Google Scholar] [CrossRef]
- Subyani, A.M. Use of chloride-mass balance and environmental isotopes for evaluation of groundwater recharge in the alluvial aquifer, Wadi Tharad, western Saudi Arabia. Environ. Geol. 2004, 46, 741–749. [Google Scholar] [CrossRef]
- Shende, S.; Chau, K.W. Forecasting safe distance of a pumping well for effective riverbank filtration. J. Hazard. Toxic Radioact. Waste 2019, 23, 04018040. [Google Scholar] [CrossRef]
- Cuthbert, M.O.; Acworth, R.I.; Andersen, M.S.; Larsen, J.R.; McCallum, A.M.; Rau, G.C.; Tellam, J.H. Understanding and quantifying focused, indirect groundwater recharge from ephemeral streams using water table fluctuations. Water Resour. Res. 2016, 52, 827–840. [Google Scholar] [CrossRef]
- Delottier, H.; Pryet, A.; Lemieux, J.M.; Dupuy, A. Estimating groundwater recharge uncertainty from joint application of an aquifer test and the water-table fluctuation method. Hydrogeol. J. 2018, 26, 2495–2505. [Google Scholar] [CrossRef]
- Fan, J.L.; Oestergaard, K.T.; Guyot, A.; Lockington, D.A. Estimating groundwater recharge and evapotranspiration from water table fluctuations under three vegetation covers in a coastal sandy aquifer of subtropical Australia. J. Hydrol. 2014, 519, 1120–1129. [Google Scholar] [CrossRef] [Green Version]
- Hou, L.Z.; Wang, X.S.; Hu, B.X.; Shang, J.; Wan, L. Experimental and numerical investigations of soil water balance at the hinterland of the Badain Jaran Desert for groundwater recharge estimation. J. Hydrol. 2016, 540, 386–396. [Google Scholar] [CrossRef]
- Izady, A.; Abdalla, O.A.E.; Joodavi, A.; Karimi, A.; Chen, M.J.; Tompson, A. Groundwater recharge estimation in arid hardrock-alluvium aquifers using combined water-table fluctuation and groundwater balance approaches. Hydrol. Process. 2017, 31, 3437–3451. [Google Scholar] [CrossRef]
- Park, C.; Seo, J.; Lee, J.; Ha, K.; Koo, M.H. A distributed water balance approach to groundwater recharge estimation for Jeju volcanic island, Korea. Geosci. J. 2014, 18, 193–207. [Google Scholar] [CrossRef]
- Fu, G.B.; Crosbie, R.S.; Barron, O.; Charles, S.P.; Dawes, W.; Shi, X.G.; Niel, T.V.; Li, C. Attributing variations of temporal and spatial groundwater recharge: A statistical analysis of climatic and non-climatic factors. J. Hydrol. 2019, 568, 816–834. [Google Scholar] [CrossRef]
- Messier, K.P.; Campbell, T.; Bradley, P.J.; Serret, M.L. Estimation of Groundwater Radon in North Carolina Using Land Use Regression and Bayesian Maximum Entropy. Environ. Sci. Technol. 2015, 49, 9817–9825. [Google Scholar] [CrossRef]
- Doble, R.C.; Crosbie, R.S. Review: Current and emerging methods for catchment-scale modelling of recharge and evapotranspiration from shallow groundwater. Hydrogeol. J. 2017, 25, 3–23. [Google Scholar] [CrossRef]
- Mogaji, K.A.; Lim, H.S.; Abdullah, K. Modeling of groundwater recharge using a multiple linear regression (MLR) recharge model developed from geophysical parameters: A case of groundwater resources management. Environ. Earth Sci. 2015, 73, 1217–1230. [Google Scholar] [CrossRef]
- Figura, S.; Livingstone, D.M.; Kipfer, R. Forecasting groundwater temperature with linear regression models using historical data. Groundwater 2015, 53, 943–954. [Google Scholar] [CrossRef] [PubMed]
- Ebrahimi, H.; Rajaee, T. Simulation of groundwater level variations using wavelet combined with neural network, linear regression and support vector machine. Glob. Planet Chang. 2017, 148, 181–191. [Google Scholar] [CrossRef]
- Shamshirband, S.; Nodoushan, E.J.; Adolf, J.E.; Manaf, A.A.; Mosavi, A.; Chau, K.W. Ensemble models with uncertainty analysis for multi-day ahead forecasting of chlorophyll a concentration in coastal waters. Eng. Appl. Comp. Fluid 2019, 13, 91–101. [Google Scholar] [CrossRef]
- Gholami, V.; Chau, K.W.; Fadaee, F.; Torkaman, J.; Ghaffari, A. Modeling of groundwater level fluctuations using dendrochronology in alluvial aquifers. J. Hydrol. 2015, 529, 1060–1069. [Google Scholar] [CrossRef]
- Taormina, R.; Chau, K.W.; Sethi, R. Artificial neural network simulation of hourly groundwater levels in a coastal aquifer system of the Venice lagoon. Eng. Appl. Artif. Intell. 2012, 25, 1670–1676. [Google Scholar] [CrossRef] [Green Version]
- Taormina, R.; Chau, K.W.; Sivakumar, B. Neural network river forecasting through baseflow separation and binary-coded swarm optimization. J. Hydrol. 2015, 529, 1788–1797. [Google Scholar] [CrossRef]
- Mohanty, S.; Jha, M.K.; Raul, S.K.; Panda, R.K.; Sudheer, K.P. Using artificial neural network approach for simultaneous forecasting of weekly groundwater levels at multiple sites. Water Resour. Manag. 2015, 29, 5521–5532. [Google Scholar] [CrossRef]
- Sun, Y.B.; Wendi, D.; Kim, D.E.; Liong, S.Y. Technical note: Application of artificial neural networks in groundwater table forecasting—A case study in a Singapore swamp forest. Hydrol. Earth Syst. Sci. 2016, 20, 1405–1412. [Google Scholar] [CrossRef]
- Pasandi, M.; Salmani, N.; Samani, N. Spatial estimation of water-table depth by artificial neural networks in light of ancillary data. Hydrol. Sci. J. 2017, 62, 2012–2024. [Google Scholar] [CrossRef]
- Kong-A-Siou, L.; Johannet, A.; Estupina, V.B.; Pistre, S. Neural networks for karst groundwater management: Case of the Lez spring (Southern France). Environ. Earth Sci. 2015, 74, 7617–7632. [Google Scholar] [CrossRef]
- Jiang, Z.J.; Mallants, D.; Peeters, L.; Gao, L.; Soerensen, C.; Mariethoz, G. High-resolution paleovalley classification from airborne electromagnetic imaging and deep neural network training using digital elevation model data. Hydrol. Earth Syst. Sci. 2019, 23, 2561–2580. [Google Scholar] [CrossRef] [Green Version]
- Alizadeh, M.J.; Kavianpour, M.R.; Danesh, M.; Adolf, J.; Shamshirband, S.; Chau, K.W. Effect of river flow on the quality of estuarine and coastal waters using machine learning models. Eng. Appl. Comp. Fluid 2018, 12, 810–823. [Google Scholar] [CrossRef] [Green Version]
- Ye, L.; Gao, L.; Marcos-Martinez, R.; Mallants, D.; Bryan, B.A. Projecting Australia’s forest cover dynamics and exploring influential factors using deep learning. Environ. Modell. Softw. 2019, 119, 407–417. [Google Scholar] [CrossRef]
- Scher, S. Toward data-driven weather and climate forecasting: Approximating a simple general circulation model with deep learning. Geophys. Res. Lett. 2018, 45, 12616–12622. [Google Scholar] [CrossRef]
- Jiang, G.Q.; Xu, J.; Wei, J. A deep learning algorithm of neural network for the parameterization of typhoon-ocean feedback in typhoon forecast models. Geophys. Res. Lett. 2018, 45, 3706–3716. [Google Scholar] [CrossRef]
- Jones, D.A.; Wang, W.; Fawcett, R. High-quality spatial climate data-sets for Australia. Aust. Meteorol. Ocean 2009, 58, 233–248. [Google Scholar] [CrossRef]
- Donohue, R.J.; McVicar, T.R.; Roderick, M.L. Assessing the ability of potential evaporation formulations to capture the dynamics in evaporative demand within a changing climate. J. Hydrol. 2010, 386, 186–197. [Google Scholar] [CrossRef]
- Leaney, F.W.; Herczeg, A.L. Regional Recharge to a Karst Aquifer Estimated from Chemical and Isotopic Composition of Diffuse and Localized Recharge, South Australia. J. Hydrol. 1995, 164, 363–387. [Google Scholar] [CrossRef]
- Healy, R.W.; Cook, P.G. Using groundwater levels to estimate recharge. Hydrogeol. J. 2002, 10, 91–109. [Google Scholar] [CrossRef]
- Meinzer, O.E.; Stearns, N.D. A study of ground water in the Pomperaug Basin, Connecticut with special reference to intake and discharge. Anat. Rec. 1929, 64, 327–341. [Google Scholar]
- Crosbie, R.S.; Davies, P. Recharge estimation. In Framework for a Regional Water Balance Model for the South Australian Limestone Coast Region; Harrington, N., Lamontagne, S., Eds.; Goyder Institute for Water Research: Adelaide, SA, Australia, 2013. [Google Scholar]
- Jeffrey, S.J.; Carter, J.O.; Moodie, K.B.; Beswick, A.R. Using spatial interpolation to construct a comprehensive archive of Australian climate data. Environ. Modell. Softw. 2001, 16, 309–330. [Google Scholar] [CrossRef]
- Chiew, F.; Wang, Q.J.; Mcconachy, F.; James, R.; Wright, W.; De Hoedt, G. Evaportranspiration maps for Australia. In Proceedings of the Hydrology and Water Resources Symposium, Melbourne, Australia, 20–23 May 2002. [Google Scholar]
- Morton, F.I. Operational Estimates of Areal Evapo-Transpiration and Their Significance to the Science and Practice of Hydrology. J. Hydrol. 1983, 66, 1–76. [Google Scholar] [CrossRef]
- Harrington, N.; Li, C. Development of a Groundwater Extraction Dataset for the South East of South Australia: 1970–2013; Goyder Institute for Water Research: Adelaide, SA, Australia, 2015. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural. Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.F.; Zhu, Y.; Zhang, X.P.; Ye, M.; Yang, J.Z. Developing a Long Short-Term Memory (LSTM) based model for predicting water table depth in agricultural areas. J. Hydrol. 2018, 561, 918–929. [Google Scholar] [CrossRef]
- Wen, L.L.; Zhou, K.L.; Yang, S.L.; Lu, X.H. Optimal load dispatch of community microgrid with deep learning based solar power and load forecasting. Energy 2019, 171, 1053–1065. [Google Scholar] [CrossRef]
- Gao, L.; Bryan, B.A. Incorporating deep uncertainty into the elementary effects method for robust global sensitivity analysis. Ecol. Modell. 2016, 321, 1–9. [Google Scholar] [CrossRef]
- Gao, L.; Bryan, B.A.; Nolan, M.; Connor, J.D.; Song, X.D.; Zhao, G. Robust global sensitivity analysis under deep uncertainty via scenario analysis. Environ. Modell. Softw. 2016, 76, 154–166. [Google Scholar] [CrossRef]
- Gao, L.; Bryan, B.A.; Liu, J.; Li, W.; Chen, Y.; Liu, R.; Barrett, D. Managing too little and too much water: Robust mine-water management strategies under variable climate and mine conditions. J. Clean. Prod. 2017, 162, 1009–1020. [Google Scholar] [CrossRef]
- Gao, L.; Ding, Y.; Ying, H. An adaptive social network-inspired approach to resource discovery for the complex grid systems. Int. J. Gen. Syst. 2006, 35, 347–360. [Google Scholar] [CrossRef]
- Gao, L.; Hailu, A. Comprehensive Learning Particle Swarm Optimizer for Constrained Mixed-Variable Optimization Problems. Int. J. Comput. Int. Syst. 2010, 3, 832–842. [Google Scholar] [CrossRef]
- Huang, X.; Hao, K.R.; Ding, Y.S. Human fringe skeleton extraction by an improved Hopfield neural network with direction features. Neurocomputing 2012, 87, 99–110. [Google Scholar] [CrossRef]
- Huang, X.; Zhu, Y.P. An entity based multi-direction cooperative deformation algorithm for generating personalized human shape. Multimed. Tools Appl. 2018, 77, 24865–24889. [Google Scholar] [CrossRef]
- Huang, X.; Gao, L. Reconstructing three-dimensional human poses: A combined approach of iterative calculation on skeleton model and conformal geometric algebra. Symmetry Basel 2019, 11, 301. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Explanation | Variables | Unit |
|---|---|---|---|
| Spatial-temporal | Regional annual rainfall | Rainfall | mm |
| Regional April-October rainfall | Rainfall4-10 | mm | |
| Regional May-September rainfall | Rainfall5-9 | mm | |
| Regional annual actual evaporation | ET | mm | |
| Regional April-October actual evaporation | ET4-10 | mm | |
| Regional May-September actual evaporation | ET5-9 | mm | |
| Regional annual maximum temperature | Maxtem | °C | |
| Regional April-October maximum temperature | Maxtem4-10 | °C | |
| Regional May-September maximum temperature | Maxtem5-9 | °C | |
| Regional annual minimum temperature | Mintem | °C | |
| Regional April-October minimum temperature | Mintem4-10 | °C | |
| Regional May-September minimum temperature | Mintem5-9 | °C | |
| Regional annual Morton actual evapotranspiration | AnnMact | mm | |
| Regional mean wet-spell length | MeWS | day | |
| Regional max wet-spell length | MxWS | day | |
| Regional mean dry-spell length | MeDS | day | |
| Regional max dry-spell length | MxDS | day | |
| Regional rainfall (≥1.0mm) days annually | RD | day | |
| Regional rainfall intensity (Rainfall/RD) annually | RI | mm/day | |
| Temporal | Annual regional groundwater extraction | Extraction | mm |
| Training Data (%) | Linear Regression | MLP Model | LSTM Model | ||||||
| 70% | 0.06 | 0.20 | 0.13 | 0.02 | 0.19 | 0.12 | 0.06 | 0.12 | 0.09 |
| 80% | 0.06 | 0.19 | 0.11 | 0.02 | 0.11 | 0.06 | 0.07 | 0.10 | 0.08 |
| 90% | 0.06 | 0.20 | 0.09 | 0.02 | 0.13 | 0.05 | 0.04 | 0.11 | 0.06 |
| Training Data (%) | Linear Regression | MLP Model | LSTM Model | ||||||
| 70% | 0.96 | 0.46 | 0.79 | 0.99 | 0.49 | 0.82 | 0.94 | 0.77 | 0.88 |
| 80% | 0.95 | 0.44 | 0.85 | 0.99 | 0.82 | 0.95 | 0.93 | 0.84 | 0.92 |
| 90% | 0.95 | −0.11 | 0.89 | 0.99 | 0.54 | 0.96 | 0.98 | 0.70 | 0.96 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Gao, L.; Crosbie, R.S.; Zhang, N.; Fu, G.; Doble, R. Groundwater Recharge Prediction Using Linear Regression, Multi-Layer Perception Network, and Deep Learning. Water 2019, 11, 1879. https://doi.org/10.3390/w11091879
Huang X, Gao L, Crosbie RS, Zhang N, Fu G, Doble R. Groundwater Recharge Prediction Using Linear Regression, Multi-Layer Perception Network, and Deep Learning. Water. 2019; 11(9):1879. https://doi.org/10.3390/w11091879
Chicago/Turabian StyleHuang, Xin, Lei Gao, Russell S. Crosbie, Nan Zhang, Guobin Fu, and Rebecca Doble. 2019. "Groundwater Recharge Prediction Using Linear Regression, Multi-Layer Perception Network, and Deep Learning" Water 11, no. 9: 1879. https://doi.org/10.3390/w11091879
APA StyleHuang, X., Gao, L., Crosbie, R. S., Zhang, N., Fu, G., & Doble, R. (2019). Groundwater Recharge Prediction Using Linear Regression, Multi-Layer Perception Network, and Deep Learning. Water, 11(9), 1879. https://doi.org/10.3390/w11091879