Simulation of Ocean Circulation of Dongsha Water Using Non-Hydrostatic Shallow-Water Model





Abstract
:1. Introduction
2. Materials and Methods
2.1. Shallow-Water Equations
2.2. Numerical Method and Least-Squares Finite-Element Method
3. Results
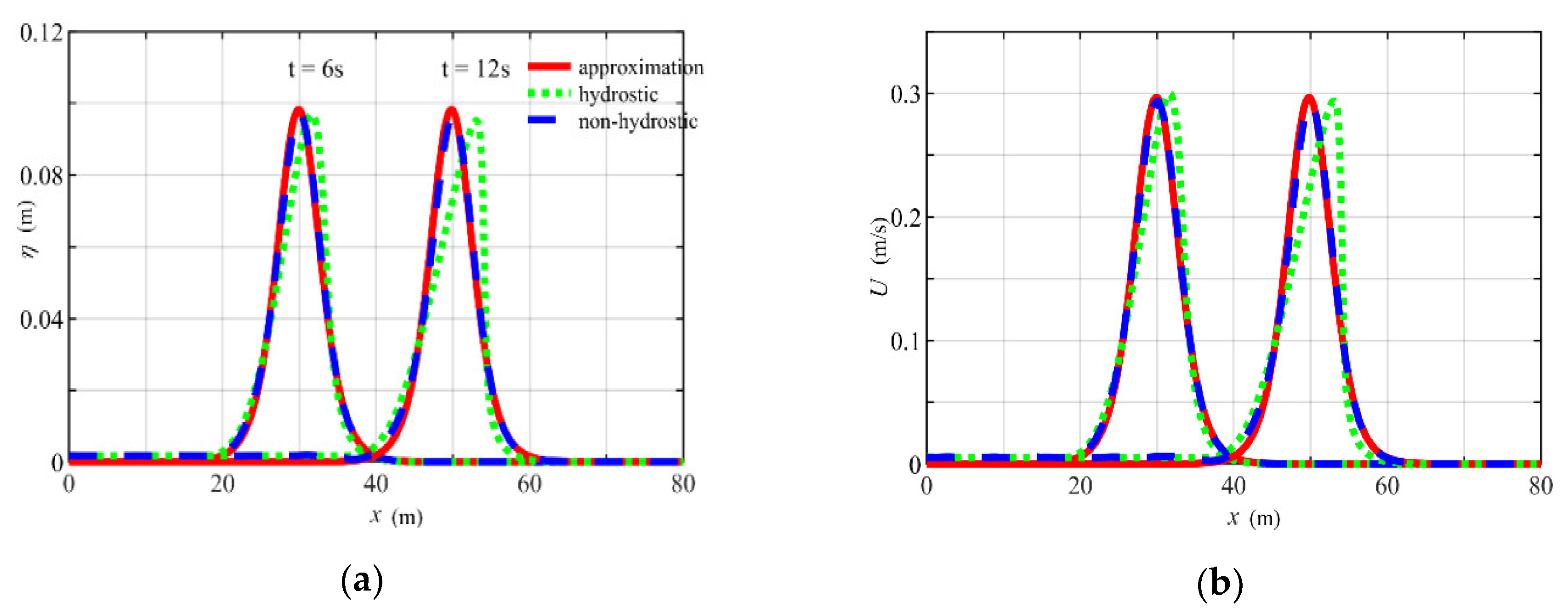
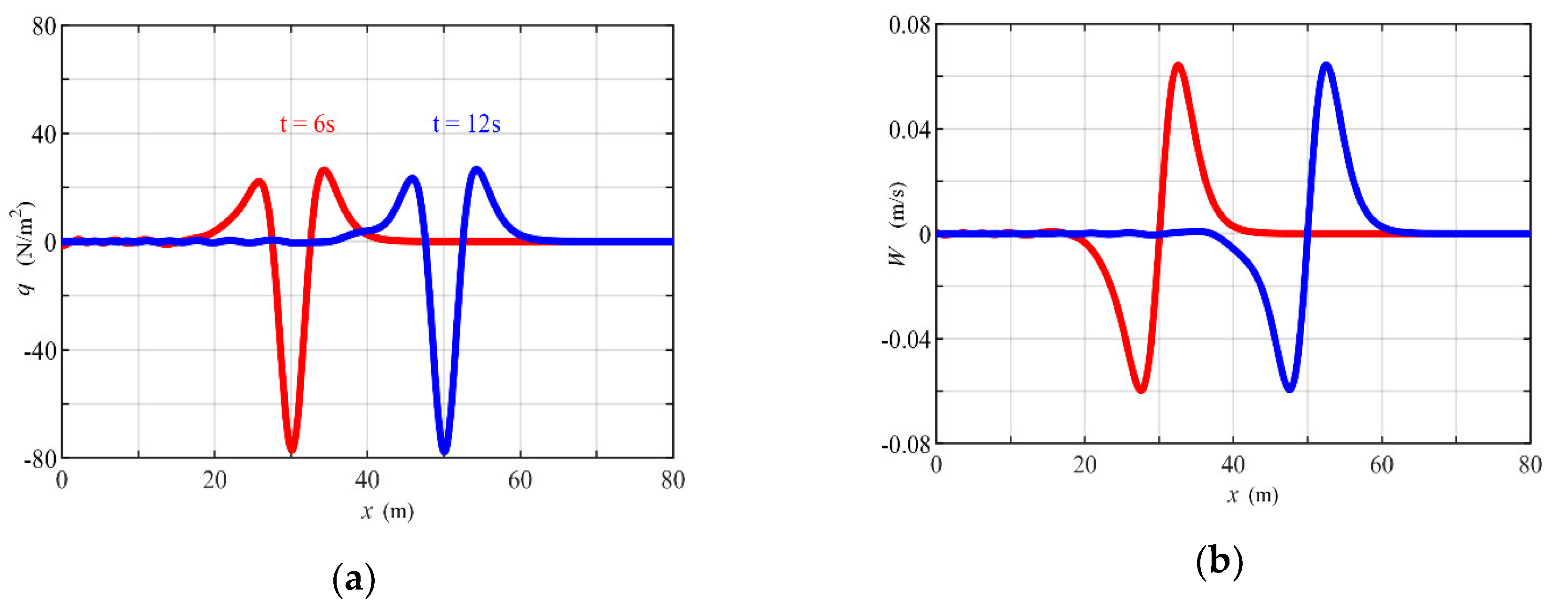
3.1. Solitary Wave Propagation in a Channel
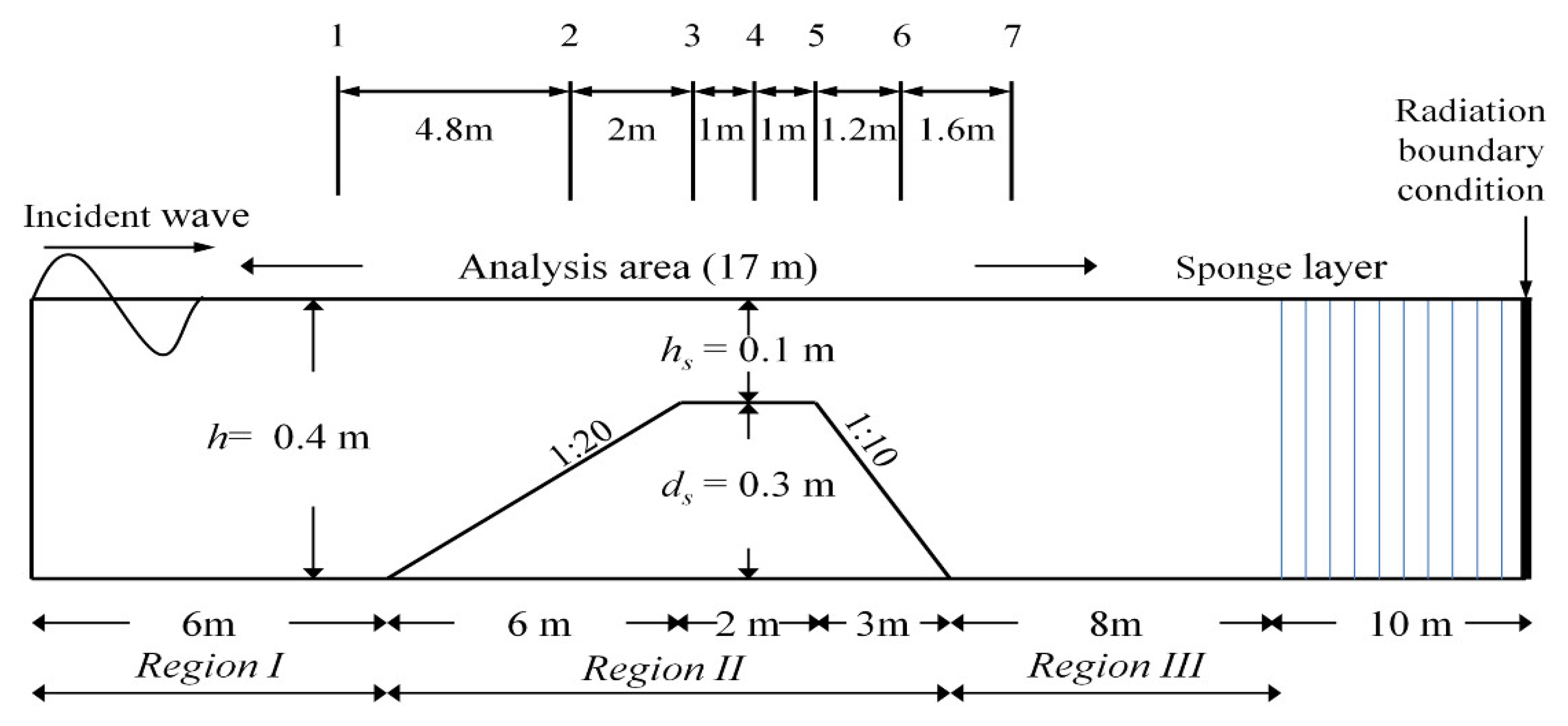
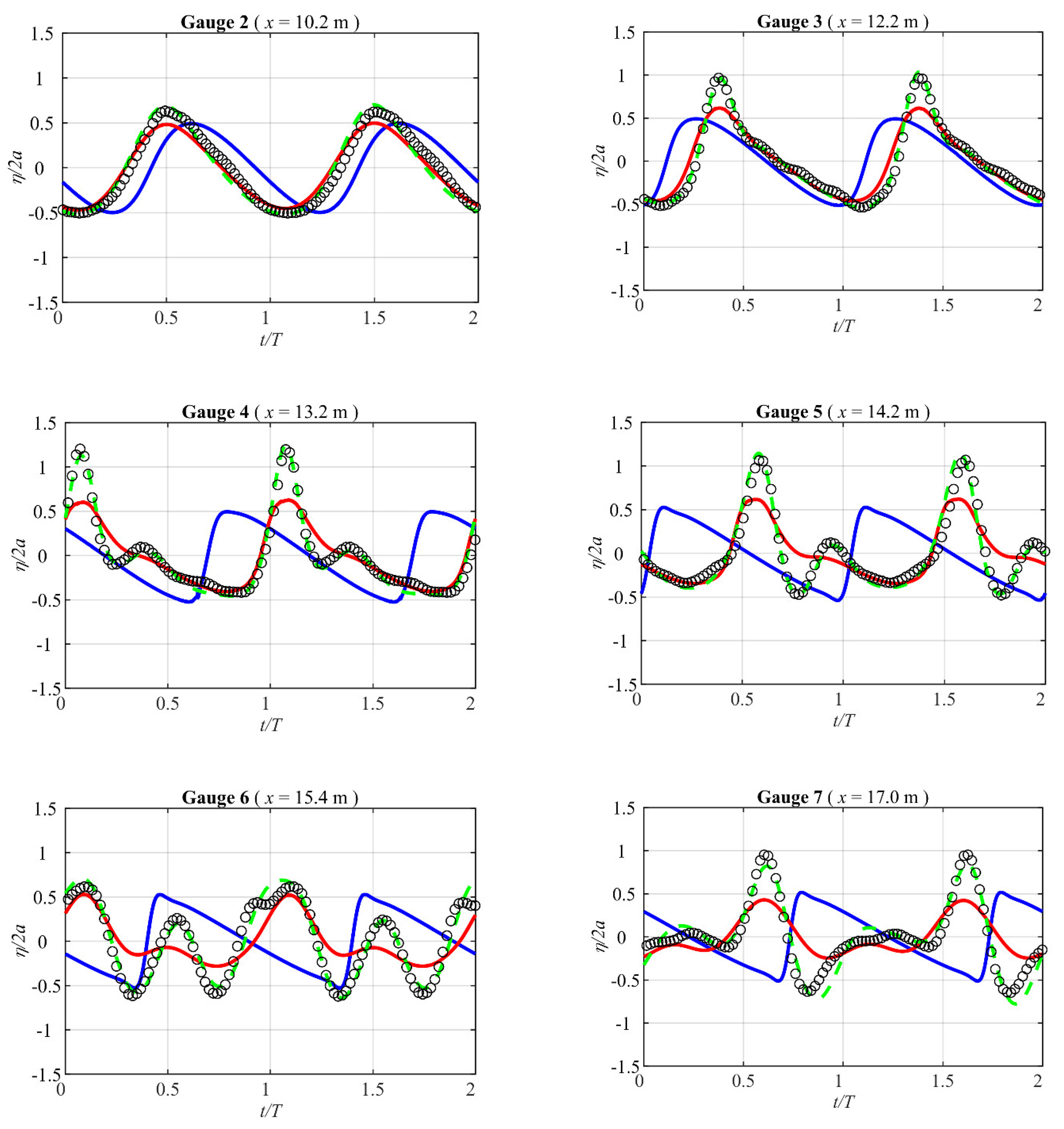
3.2. Propagation of Progressive Sinusoidal Waves over a Submerged Trapezoidal Bar
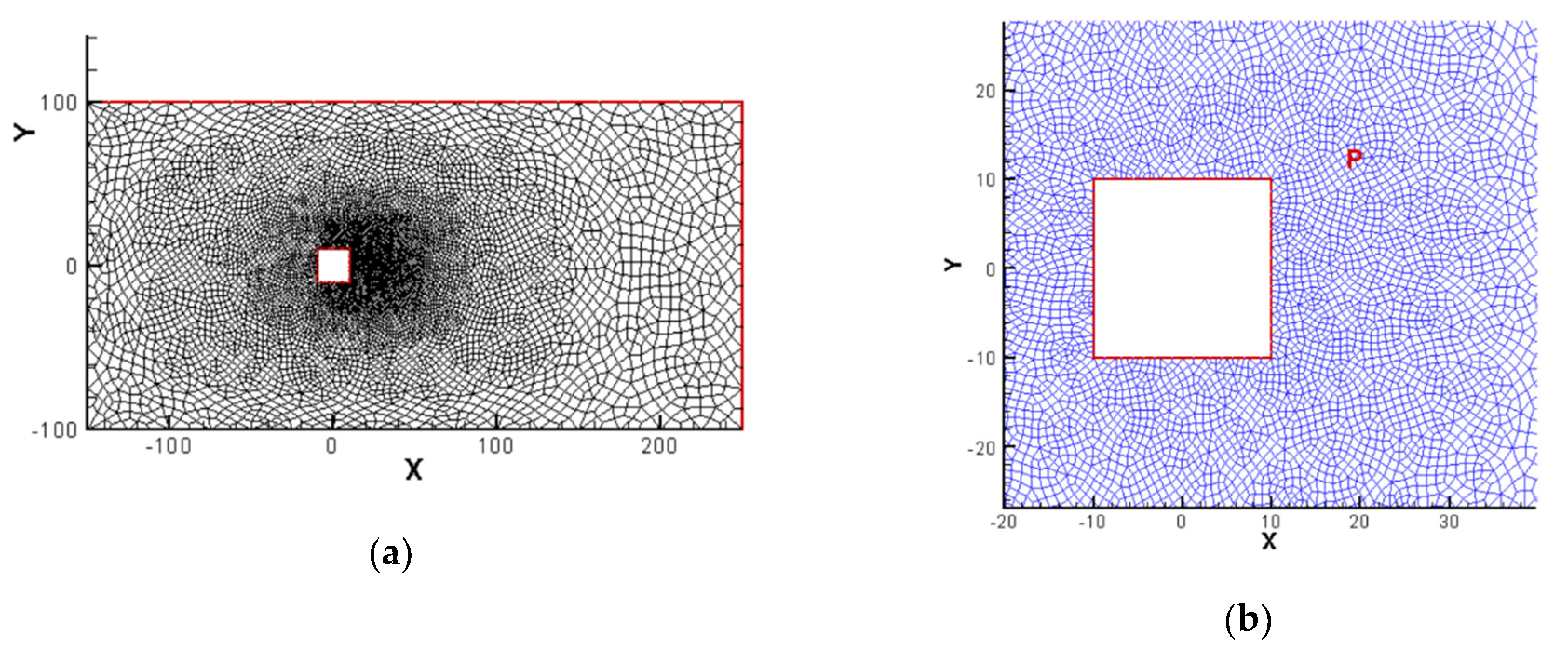
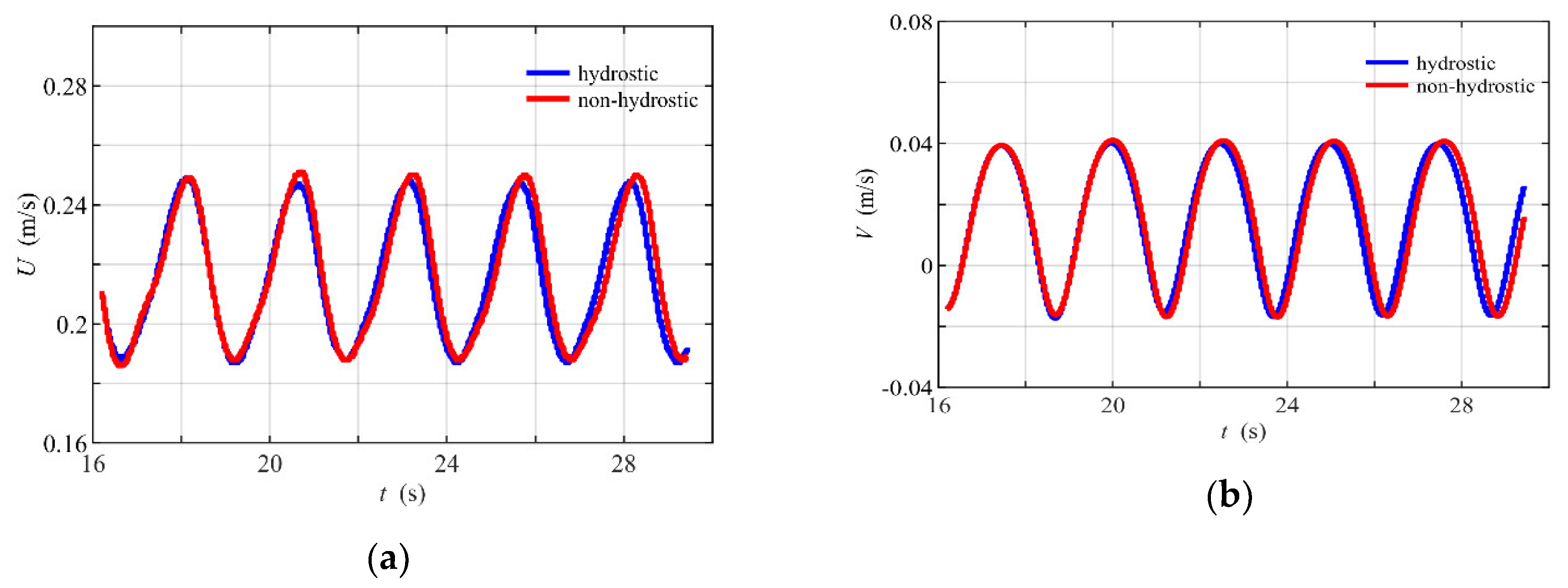
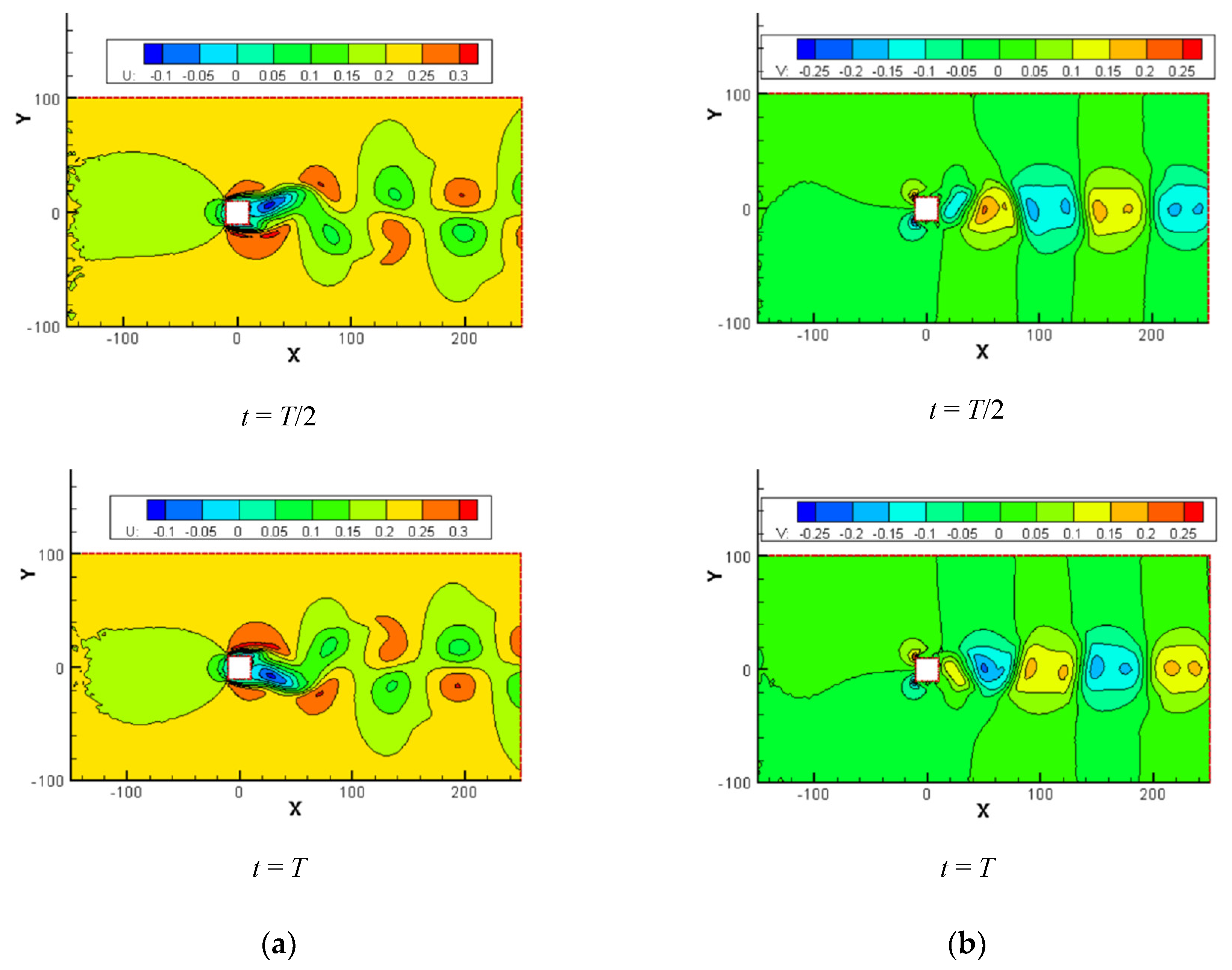
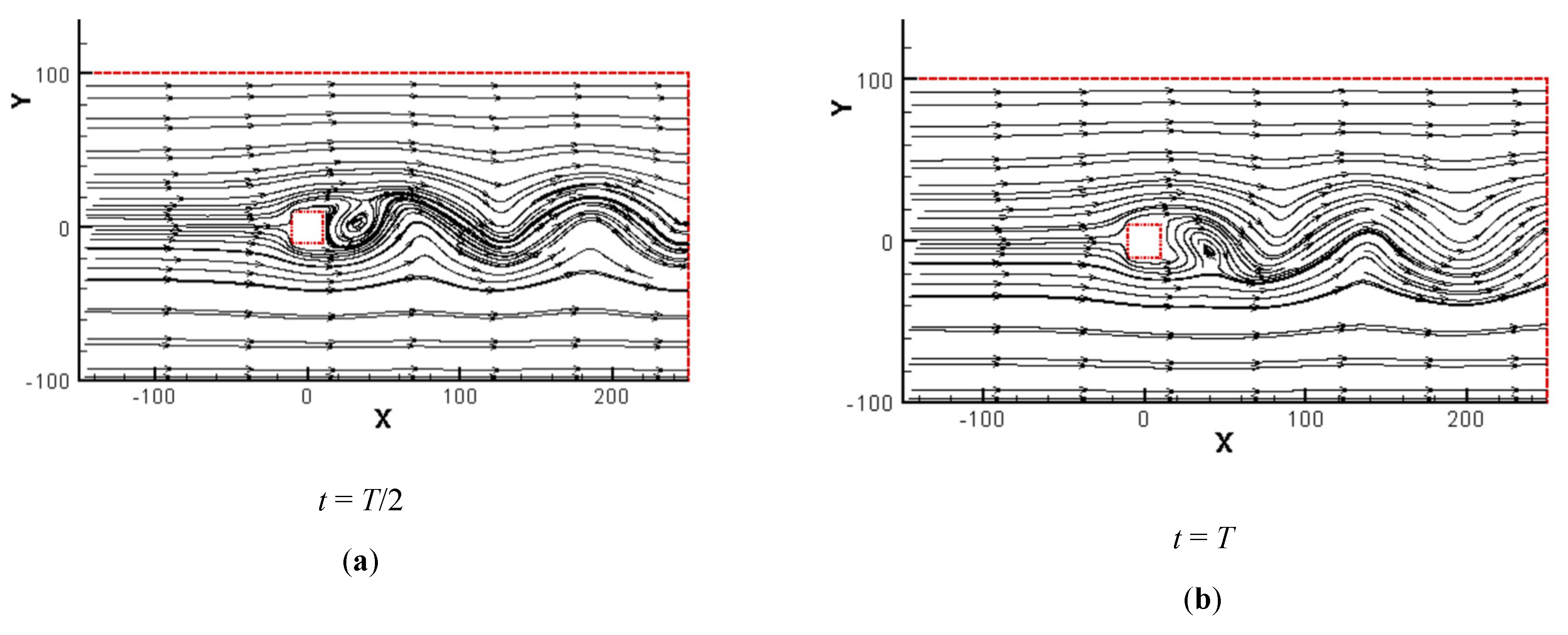
3.3. von Karmann Vortex Street
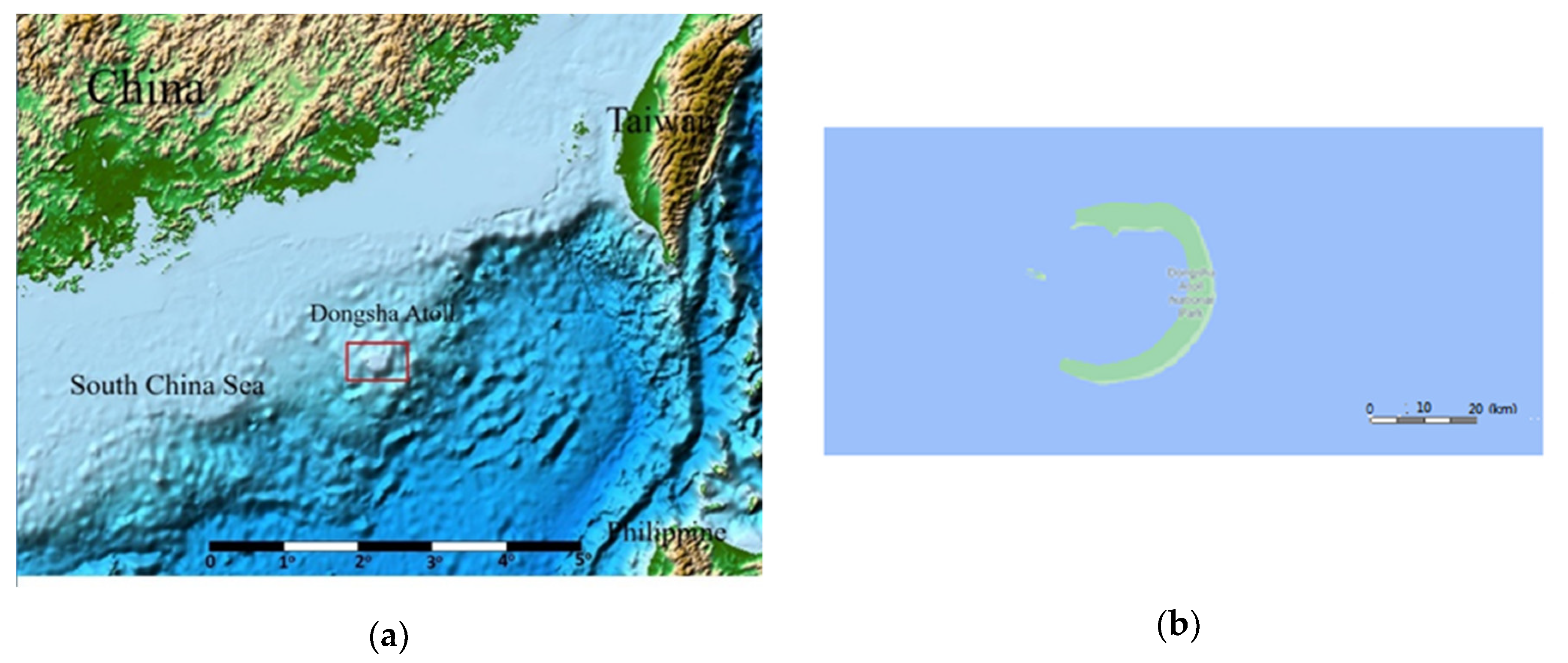
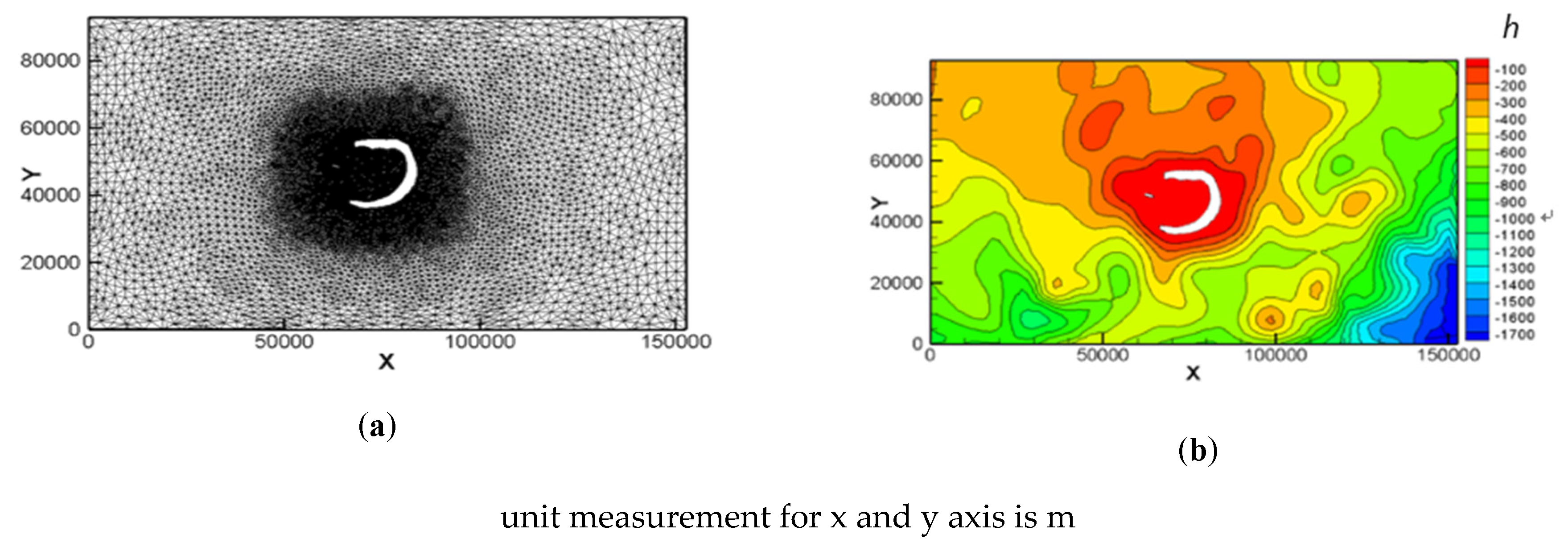
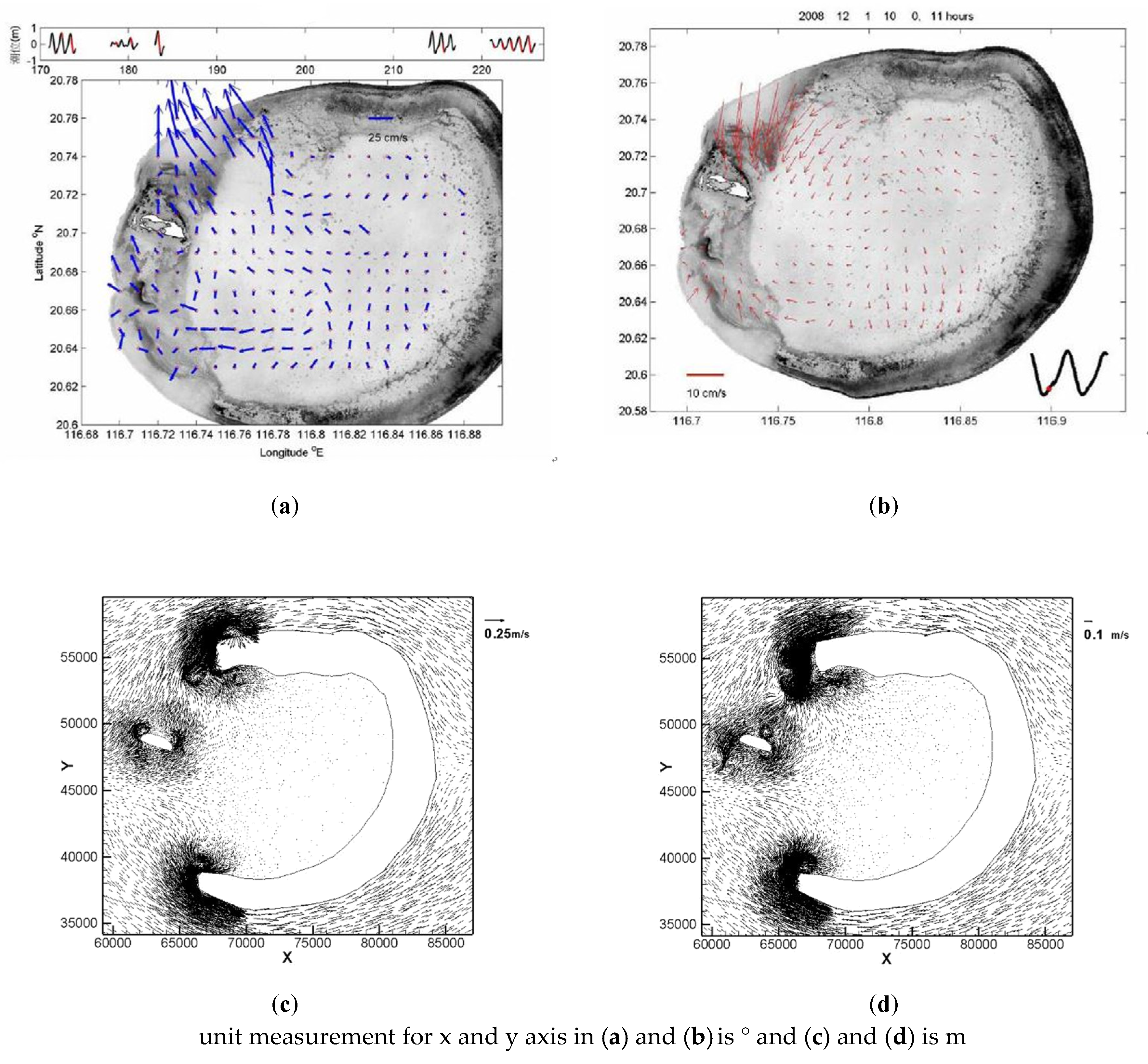
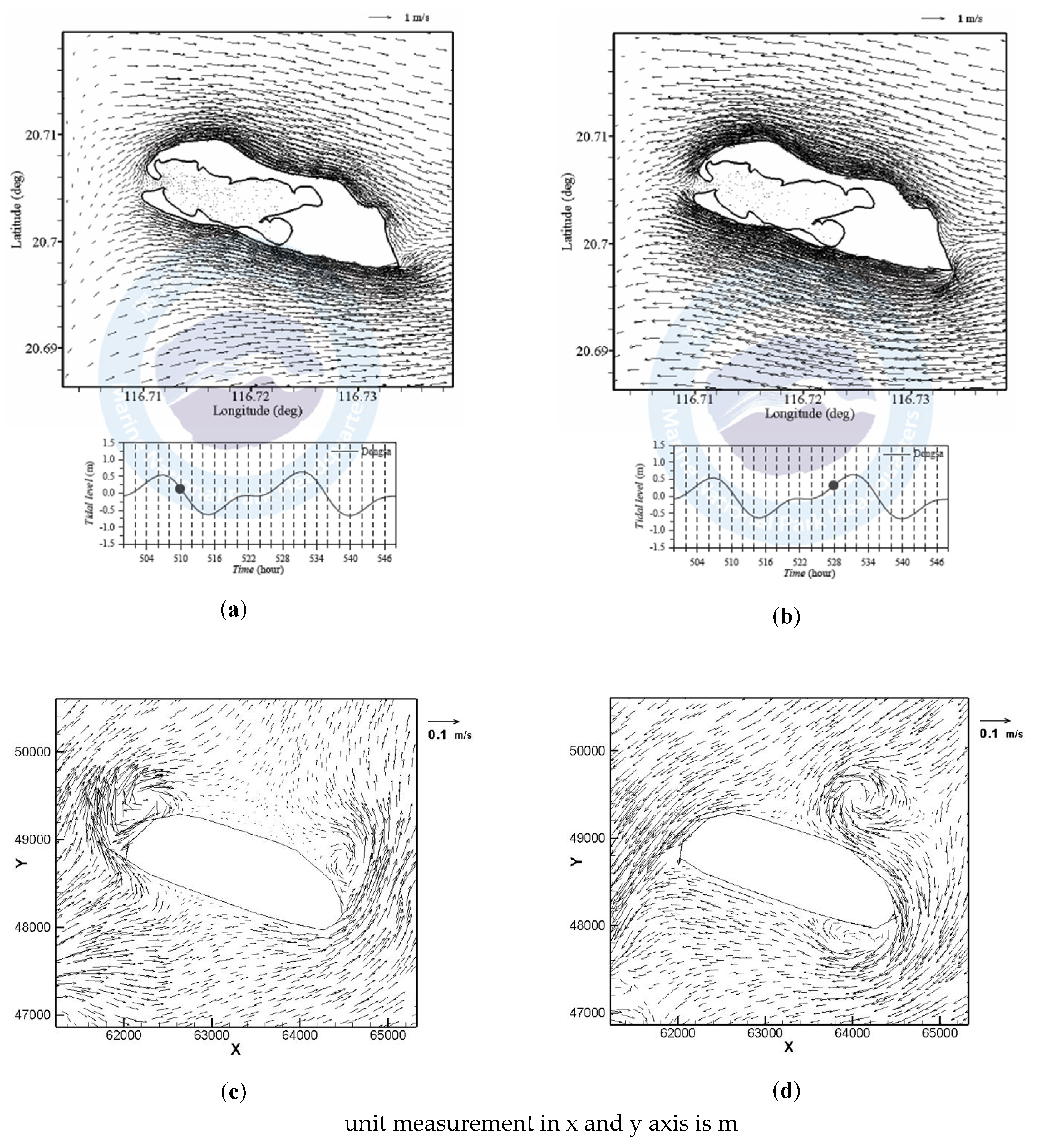
3.4. Ocean Circulation of Dongsha Water
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mei, C.C. The Applied Dynamics of Ocean Surface Waves; Wiley Inter-Science: Cambridge, UK, 1983. [Google Scholar]
- Phillips, O.M. The Dynamics of the Upper Ocean; Cambridge University Press: Cambridge, UK, 1980. [Google Scholar]
- Kinnmark, I. The Shallow-Water Wave Equations: Formulation, Analysis and Application; Springer: Berlin, Germany, 1986. [Google Scholar]
- Audusse, E.; Bristeau, M.O.; Perthame, B.; Sainte-Marie, J. A multilayer Saint-Venant system with mass exchanges for shallow water flows. Derivation and numerical validation. Esaim. Math. Model. Numer. Anal. 2011, 45, 169–200. [Google Scholar] [CrossRef]
- Debnath, L. Nonlinear Water Waves, 1st ed.; Academic Press: London, UK, 1994. [Google Scholar]
- Johnson, R.S. A Modern Introduction to the Mathematical Theory of Water Waves; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Lin, P. Numerical Modeling of Water Waves; Taylor & Francis: London, UK, 2008. [Google Scholar]
- Mei, C.C.; Stiassnie, M.; Yue Dick, K.P. Theory and Applications of Ocean. Surface Waves, Part. I: Linear Aspects and Part. II: Nonlinear Aspects; World Scientific Publishing: Singapore, 2005. [Google Scholar]
- Peregrine, D.H. Long waves on a beach. J. Fluid Mech. 1967, 27, 815–827. [Google Scholar] [CrossRef]
- Nwogu, O. Alternative form of Boussinesq equations for nearshore wave propagation. J. Waterw. Port., Coast. Ocean. Eng. 1993, 119, 618–638. [Google Scholar] [CrossRef] [Green Version]
- Casulli, V. Semi-implicit finite difference methods for two-dimensional shallow water equations. J. Comput. Phys. 1990, 86, 56–74. [Google Scholar] [CrossRef]
- Casulli, V. A semi-implicit finite difference method for non-hydrostatic, free surface flows. Int. J. Numer. Methods Fluids 1999, 30, 425–440. [Google Scholar] [CrossRef]
- Casulli, V.; Stalelling, G.S. Numerical simulation of 3D quasi-hydrostatic, free surface flows. J. Hydraul. Eng. 1998, 124, 678–686. [Google Scholar] [CrossRef]
- Stansby, P.K.; Zhou, J.G. Shallow—Water flow solver with non--hydrostatic pressure: 2D vertical plane problems. Int. J. Numer. Meth. Fluids 1998, 28, 541–563. [Google Scholar] [CrossRef]
- Lin, P.; Li, C.W. A δ-coordinate three-dimensional numerical model for surface wave propagation. Int. J. Numer. Meth. Fluids 2002, 38, 1045–1068. [Google Scholar] [CrossRef]
- Stelling, G.S.; Zijlema, M. An accurate and efficient finite-difference algorithm for non-hydrostatic free-surface flow with application to wave propagation. Int. J. Numer. Methods Fluids 2003, 43, 1–23. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.S. Further experiences with computing non-hydrostatic free-surface flows involving water waves. Int. J. Numer. Methods Fluids 2005, 48, 169–197. [Google Scholar] [CrossRef]
- Kirby, J.T.; Dalrymple, R.A. A parabolic equation for the combined refraction-diffraction of Stokes waves by mildly varying topography. J. Fluid Mech. 1983, 136, 453–466. [Google Scholar] [CrossRef] [Green Version]
- Madsen, P.A.; Murray, R.; Sorensen, O.R. A new form of the Boussinesq equations with improved linear dispersion characteristics. Coast. Eng. 1991, 15, 371–388. [Google Scholar] [CrossRef]
- Lynett, P.; Liu, P.L.F. A two-layer approach to wave modeling. Proc. R. Soc. Lond. Ser. A 2004, 460, 2637–2669. [Google Scholar] [CrossRef]
- Mayer, S.; Garapon, A.; Sorensen, L.S. A fractional step method for unsteady free-surface flow with applications to non-linear wave dynamics. Int. J. Numer. Methods Fluids 1998, 28, 293–315. [Google Scholar] [CrossRef]
- Namin, M.; Lin, B.; Falconer, R. An implicit numerical algorithm for solving non-hydrostatic free-surface flow problems. Int. J. Numer. Methods Fluids 2001, 35, 341–356. [Google Scholar] [CrossRef]
- Kocyigit, M.B.; Falconer, R.A.; Lin, B. Three-dimensional numerical modeling of free surface flows with non-hydrostatic pressure. Int. J. Numer. Methods Fluids 2002, 40, 1145–1162. [Google Scholar] [CrossRef]
- Chen, X.J. A free-surface correction method for simulating shallow water flows. J. Comput. Phys. 2003, 189, 557–578. [Google Scholar] [CrossRef]
- Lee, J.W.; Teubner, M.D.; Nixon, J.B.; Gill, P.M. A 3-D non-hydrostatic pressure model for small amplitude free surface flows. Int. J. Numer. Methods Fluids 2006, 50, 649–672. [Google Scholar] [CrossRef]
- Yuan, H.; Wu, C.H. A two-dimensional vertical non-hydrostatic δ model with an implicit method for free-surface flows. Int. J. Numer. Methods Fluids 2004, 44, 811–835. [Google Scholar] [CrossRef]
- Yuan, H.; Wu, C.H. An implicit 3D fully non-hydrostatic model for free-surface flows. Int. J. Numer. Meth. Fluids 2004, 46, 709–733. [Google Scholar] [CrossRef]
- Choi, D.Y.; Wu, C.H. A new efficient 3D non-hydrostatic free-surface flow model for simulating water wave motions. Ocean. Eng. 2006, 33, 587–609. [Google Scholar] [CrossRef]
- Young, C.C.; Wu, C.H.; Kuo, J.T.; Liu, W.C. A high-order δ-coordinate no-hydrostatic model for nonlinear surface waves. Ocean. Eng. 2007, 34, 1357–1370. [Google Scholar] [CrossRef]
- Badiei, P.; Namin, M.; Ahmadi, A. A three-dimensional non-hydrostatic vertical boundary fitted model for free-surface flows. Int. J. Numer. Methods Fluids 2008, 56, 607–627. [Google Scholar] [CrossRef]
- Li, B. A 3-D model based on Navier-Stokes equations for regular and irregular water wave propagation. Ocean. Eng. 2008, 35, 1842–1853. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.S. Efficient computation of surf zone waves using the nonlinear shallow water equations with non-hydrostatic pressure. Coast. Eng. 2008, 55, 780–790. [Google Scholar] [CrossRef]
- Bai, Y.; Cheung, K.F. Dispersion and nonlinearity of multi-layer non-hydrostatic free-surface flow. J. Fluid Mech. 2013, 726, 226–260. [Google Scholar] [CrossRef]
- Young, C.C.; Wu, C.H.; Liu, W.C.; Kuo, J.T. A higher-order non-hydrostatic model for simulating non-linear refraction-diffraction of water waves. Coast. Eng. 2009, 56, 919–930. [Google Scholar] [CrossRef]
- Wu, C.H.; Young, C.C.; Chen, Q.; Lynett, P.J. Efficient nonhydrostatic modeling of surface waves from deep to shallow water. J. Waterw. Port. Coast. Ocean. Eng. 2010, 136, 104–118. [Google Scholar] [CrossRef]
- Young, C.C.; Wu, C.H. Nonhydrostatic modeling of nonlinear deep-water wave groups. J. Eng. Mech. 2010, 136, 155–167. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-capturing non-hydrostatic model for fully dispersive surface wave process. Ocean. Model. 2012, 43–44, 22–35. [Google Scholar] [CrossRef]
- Ting, C.L.; Chao, W.T.; Young, C.C. Experimental investigation of nonlinear regular wave transformation over a submerged step: Harmonic generation and wave height modulation. Coast. Eng. 2016, 117, 19–31. [Google Scholar] [CrossRef]
- Liang, S.J.; Tang, J.H.; Wu, M.S. Solution of shallow-water equations using least-squares finite-element method. Acta Mech. Sin. 2008, 24, 523–532. [Google Scholar]
- Liang, S.J.; Hsu, T.W. Least-squares finite-element method for shallow-water equations with source terms. Acta Mech. Sin. 2009, 25, 597–610. [Google Scholar] [CrossRef]
- Gunzburger, M. Finite Element Methods for Viscous Incompressible Flows; Academic Press: Boston, MA, USA, 1989; pp. 1–288. [Google Scholar]
- Jiang, B.N. The Least-Squares Finite Element Method—Theory and Applications in Computational Fluid Dynamics and Electromagnetics; Springer: Berlin, Germany, 1998; pp. 1–418. [Google Scholar]
- Carey, G.F.; Jiang, B.N. Element-by-element linear and non-linear solution schemes. Commun. Appl. Num. Methods 1986, 2, 145–153. [Google Scholar] [CrossRef]
- Wei, P.; Jia, Y. A depth-integrated non-hydrostatic finite element model wave propagation. Int. J. Numer. Methods Fluids 2013, 73, 976–1000. [Google Scholar] [CrossRef]
- Waters, R.A. A semi-implicit finite element model for non-hydrostatic (dispersive) surface waves. Int. J. Numer. Methods Fluids 2005, 49, 721–737. [Google Scholar] [CrossRef]
- Yamazaki, Y.; Kowalik, Z.; Cheung, K.F. Depth-averaged non-hydrostatic model for wave breaking and run-up. Int. J. Numer. Methods Fluids 2008, 61, 473–497. [Google Scholar] [CrossRef]
- Keller, H.B. A new difference scheme for parabolic problems. In Numerical Solutions of Differential Equations-II, Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, College Park, MD, USA, 11–15 May 1970; Hubbard, B., Ed.; Academic Press: New York, NY, USA, 1971; pp. 327–350. [Google Scholar]
- Beji, S.; Battjes, J.A. Experimental investigation of wave propagation over a bar. Coast. Eng. 1993, 19, 151–162. [Google Scholar] [CrossRef]
- Young, C.C.; Chao, W.T.; Ting, C.L. Applicable sloping range and bottom smoothing treatment for δ-based modeling of wave propagation over rapidly varying topography. Ocean. Eng. 2016, 125, 261–271. [Google Scholar] [CrossRef]
- Ohyama, T.; Kioka, W.; Tada, A. Applicability of numerical models to nonlinear dispersive waves. Coast. Eng. 1995, 24, 297–313. [Google Scholar] [CrossRef]
- Christou, M.; Swan, C.; Gudmestad, O.T. The interaction of surface water waves with submerged breakwaters. Coast. Eng. 2008, 55, 945–958. [Google Scholar] [CrossRef] [Green Version]
- Brossard, J.; Perret, G.; Blonce, L.; Diedhiou, A. Higher harmonics induced by a submerged horizontal plate and a submerged rectangular step in a wave flume. Coast. Eng. 2009, 56, 11–22. [Google Scholar] [CrossRef]
- Kirby, J.T. Nonlinear, dispersive long waves in water of variable depth. In Gravity Waves in Water of Finite Depth; Hunt, J.N., Ed.; Computational Mechanics Publications: Southampton, UK, 1997; pp. 1–71. [Google Scholar]
- Roeber, V.; Cheung, K.F. Shock-captureing Boussinesq-type model for nearshore wave processes. Coast. Eng. 2010, 57, 407–423. [Google Scholar] [CrossRef]
- Dean, R.G.; Dalrymple, R.A. Water Wave Mechanics for Engineers and Scientists; Advanced Series on Ocean Engineering Volume 2; Worldf Scientific: Singapore, 2000. [Google Scholar]
- Zdravkovich, M.M. Flow around Circular Cylinder, Vol. 1: Fundamentals; Oxford University Press: Oxford, UK, 1997. [Google Scholar]
- Zdravkovich, M.M. Flow around Circular Cylinder, Vol. 2: Applications; Oxford University Press: Oxford, UK, 2003. [Google Scholar]
- Wen, C.Y.; Lin, C.Y. Two-dimensional vortex shedding of a circular cylinder. Phys. Fluids 2001, 13, 557–561. [Google Scholar] [CrossRef]
- Williamson, C.H.K.; Brown, G.L. A series in 1to present the Strouhal-Reynolds number relationship of the cylinder wake. J. Fluids Struct. 1998, 12, 1073–1085. [Google Scholar] [CrossRef]
- ETOPO1. Available online: https://www.ngdc.noaa.gov/mgg/global/ (accessed on 28 August 2020).
- Google Maps. Available online: https://www.google.com.tw/maps/@20.7024867,116.6892709,13z?hl=zh-TW (accessed on 28 August 2020).
- Chen, Y.Y.; Wang, Y.H.; Lee, C.P.; Shyue, S.W.; Tian, W.M.; Liu, J.Y.; Dai, C.F.; Tseng, R.S.; Yang, G.C.; LouHuang, T.L.; et al. A Long-Term Marine Environmental Field Survey Study of Dongsha Atoll Water; Technical Report; Marine National Park Headquarters, Construction and Planning Agency, Ministry of the Interior: Taipei, Taiwan, 2008; pp. 1–274. (In Chinese)
- Blumberg, A.F.; Mellor, G.L. A.F.; Mellor, G.L. A description of a three-dimensional coastal ocean circulation model. In Three-Dimensional Coastal Ocean Models, Volume 4, Heaps, N.S.; Book Series: Coastal and Estuarine Sciences; AGU Publications: Hoboken, NJ, USA, 1987; pp. 1–6. [Google Scholar]
- Hsu, T.W.; Lan, G.H. Numerical Simulation of Coastline Changes and Strategy of Environmental Improvement for Dongsha Island; Technical Report No. 96A-041; Marine National Park Headquarters, Construction and Planning Agency, Ministry of the Interior: Taipei, Taiwan, December 2007; pp. 1–124. (In Chinese)













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length of Computed Domain (L). | Width of Computed Domain (W) | Period of K1 Tide (T) | Mesh Size (Δx) | Time Step (Δt) |
|---|---|---|---|---|
| 152 km | 92 km | 86,160 s | 120–5000 m | 100 s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, S.-J.; Young, C.-C.; Dai, C.; Wu, N.-J.; Hsu, T.-W. Simulation of Ocean Circulation of Dongsha Water Using Non-Hydrostatic Shallow-Water Model. Water 2020, 12, 2832. https://doi.org/10.3390/w12102832
Liang S-J, Young C-C, Dai C, Wu N-J, Hsu T-W. Simulation of Ocean Circulation of Dongsha Water Using Non-Hydrostatic Shallow-Water Model. Water. 2020; 12(10):2832. https://doi.org/10.3390/w12102832
Chicago/Turabian StyleLiang, Shin-Jye, Chih-Chieh Young, Chi Dai, Nan-Jing Wu, and Tai-Wen Hsu. 2020. "Simulation of Ocean Circulation of Dongsha Water Using Non-Hydrostatic Shallow-Water Model" Water 12, no. 10: 2832. https://doi.org/10.3390/w12102832
APA StyleLiang, S. -J., Young, C. -C., Dai, C., Wu, N. -J., & Hsu, T. -W. (2020). Simulation of Ocean Circulation of Dongsha Water Using Non-Hydrostatic Shallow-Water Model. Water, 12(10), 2832. https://doi.org/10.3390/w12102832