CFD Investigations of Transient Cavitation Flows in Pipeline Based on Weakly-Compressible Model

Abstract
:1. Introduction
2. Methodology
2.1. Governing Equations of Weakly Compressible Fluid
2.2. Solution of RANS Equation Based on the Weakly Compressible Model
2.3. Cavitation Model
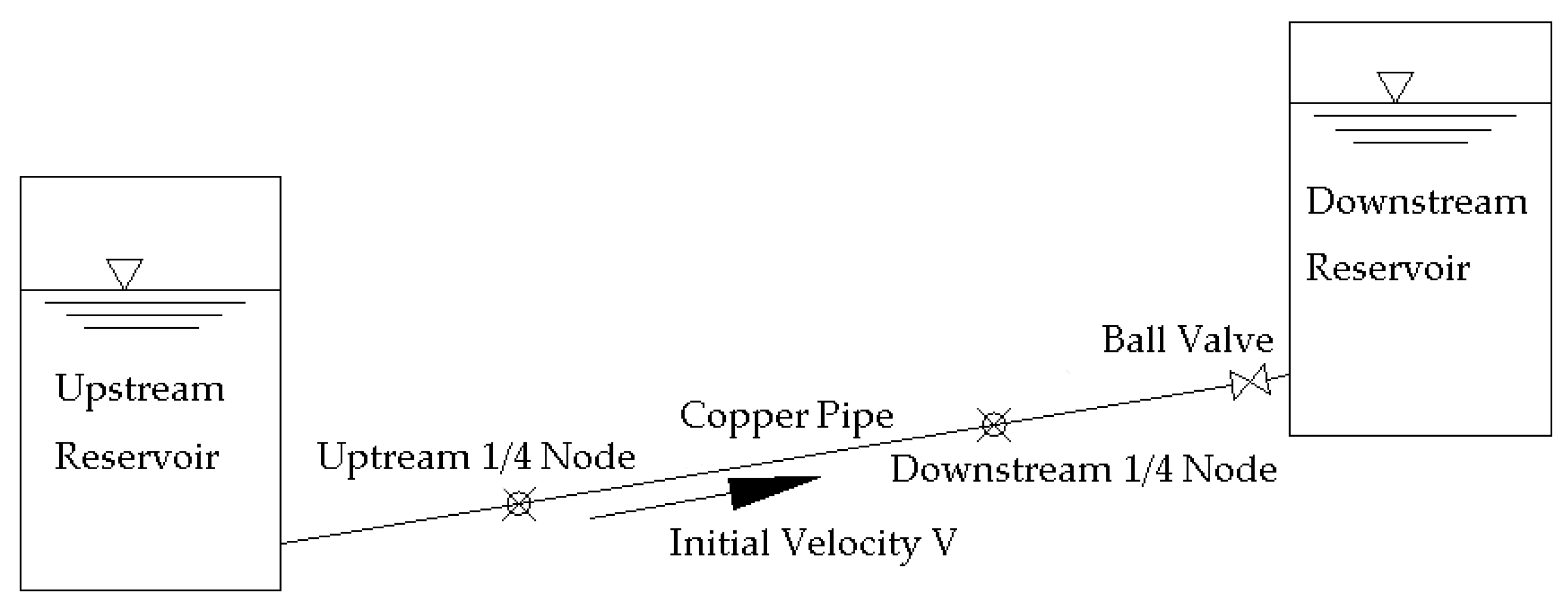
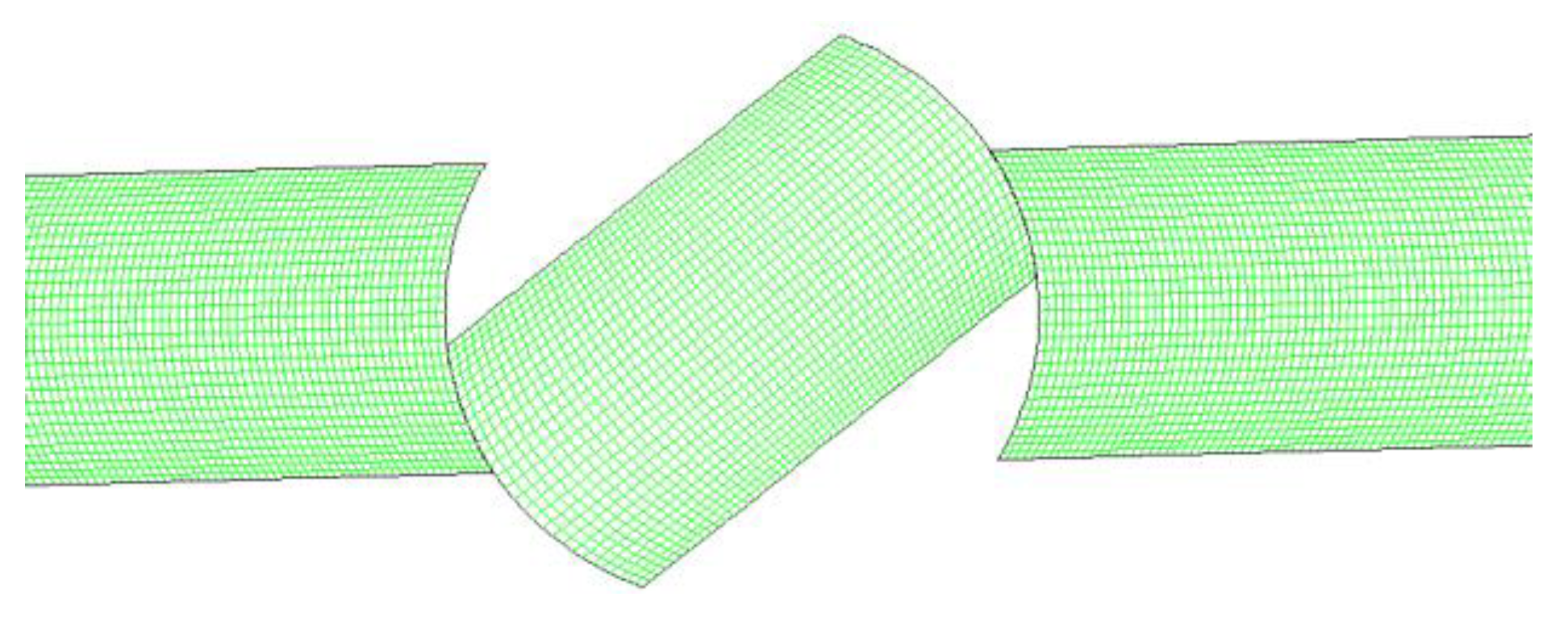
2.4. Computational Domains and Grid Model
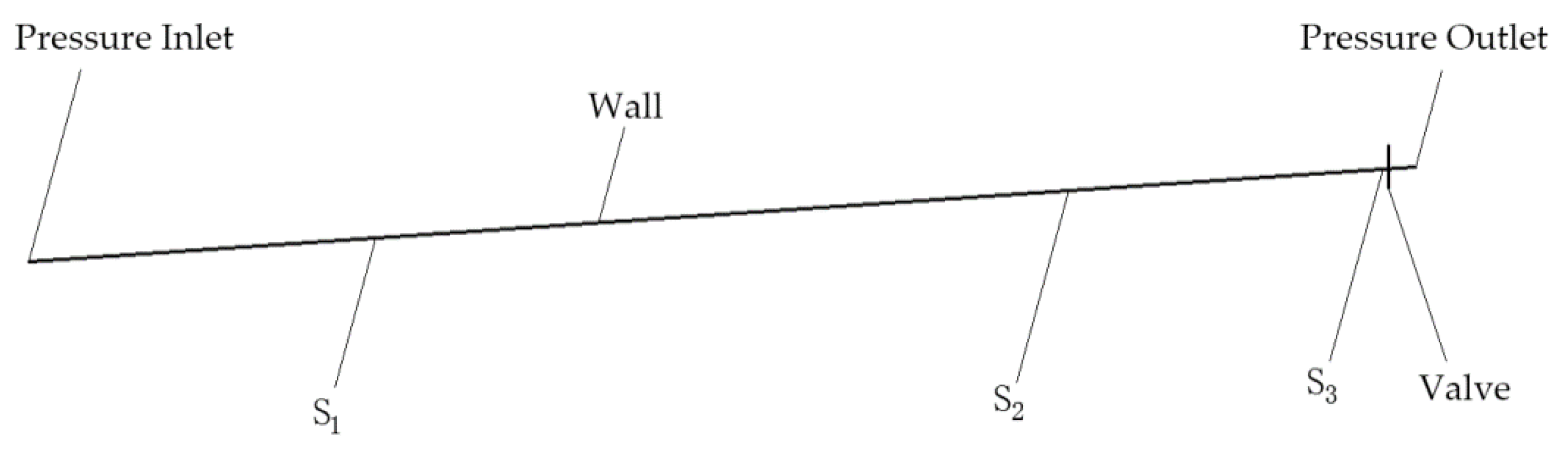
2.5. Computational Scheme and Boundary Conditions
3. Results and Discussion
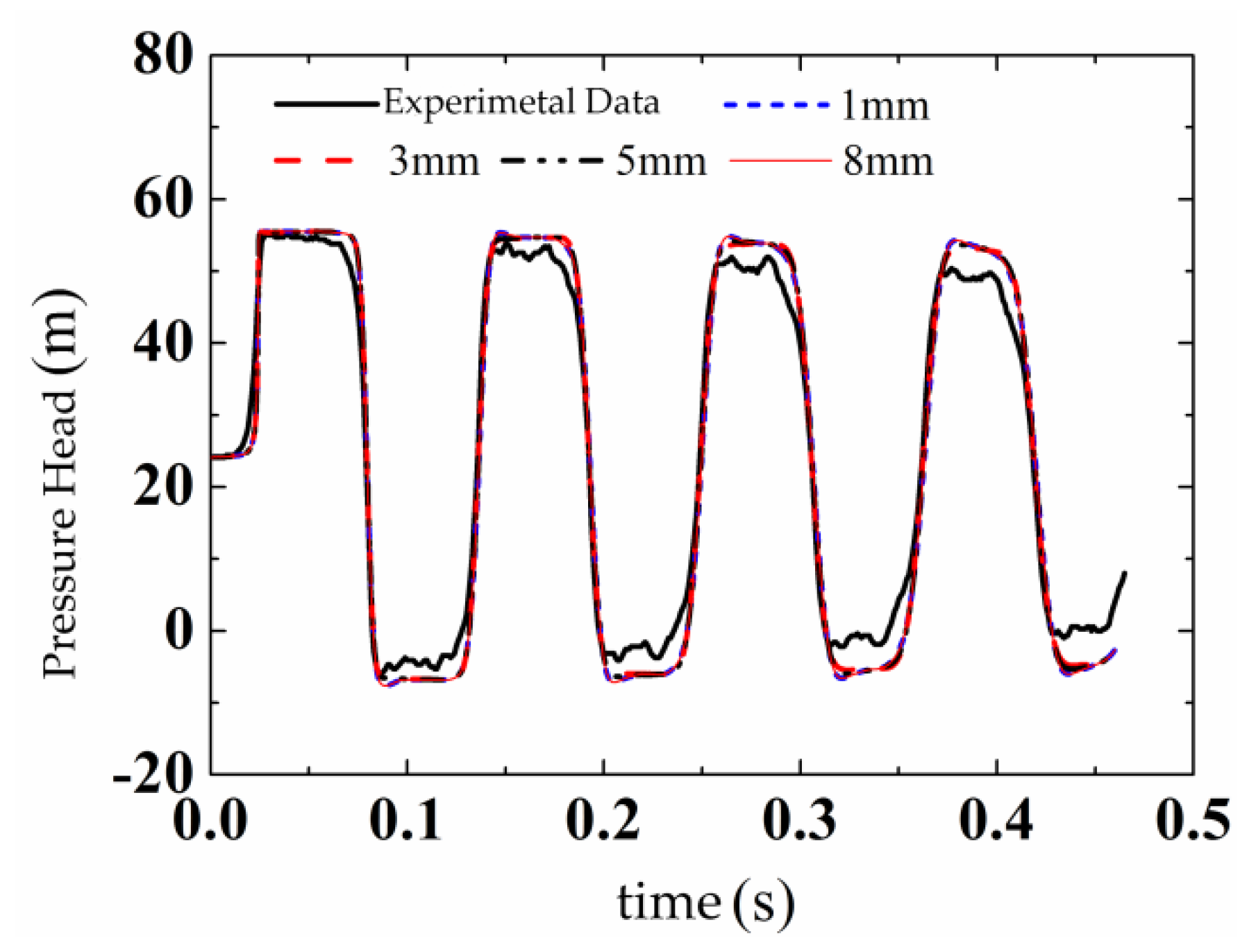
3.1. Grid Independence Verification
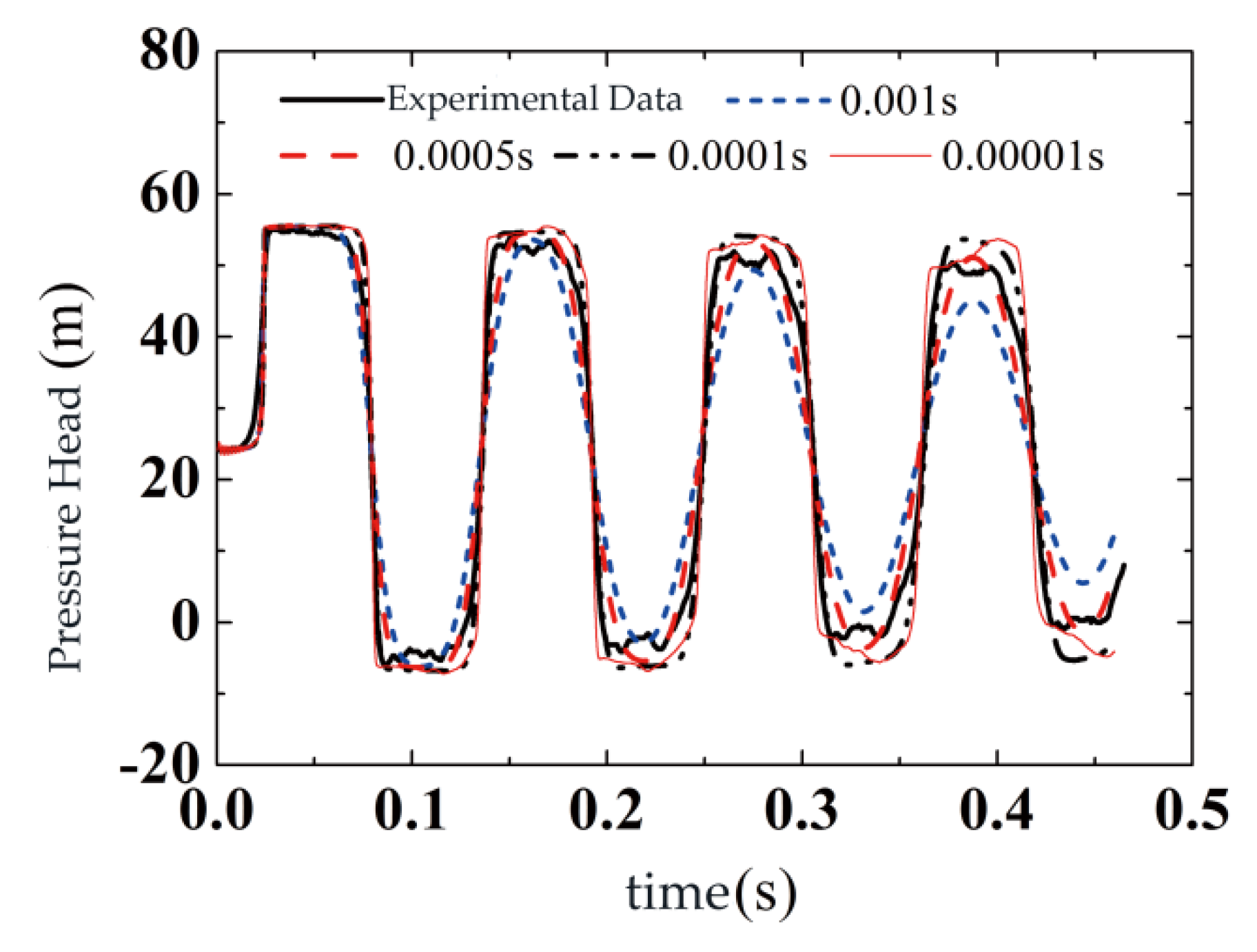
3.2. Time Step Independence Verification
3.3. Analysis of Transient Non-Cavitation Flow Results
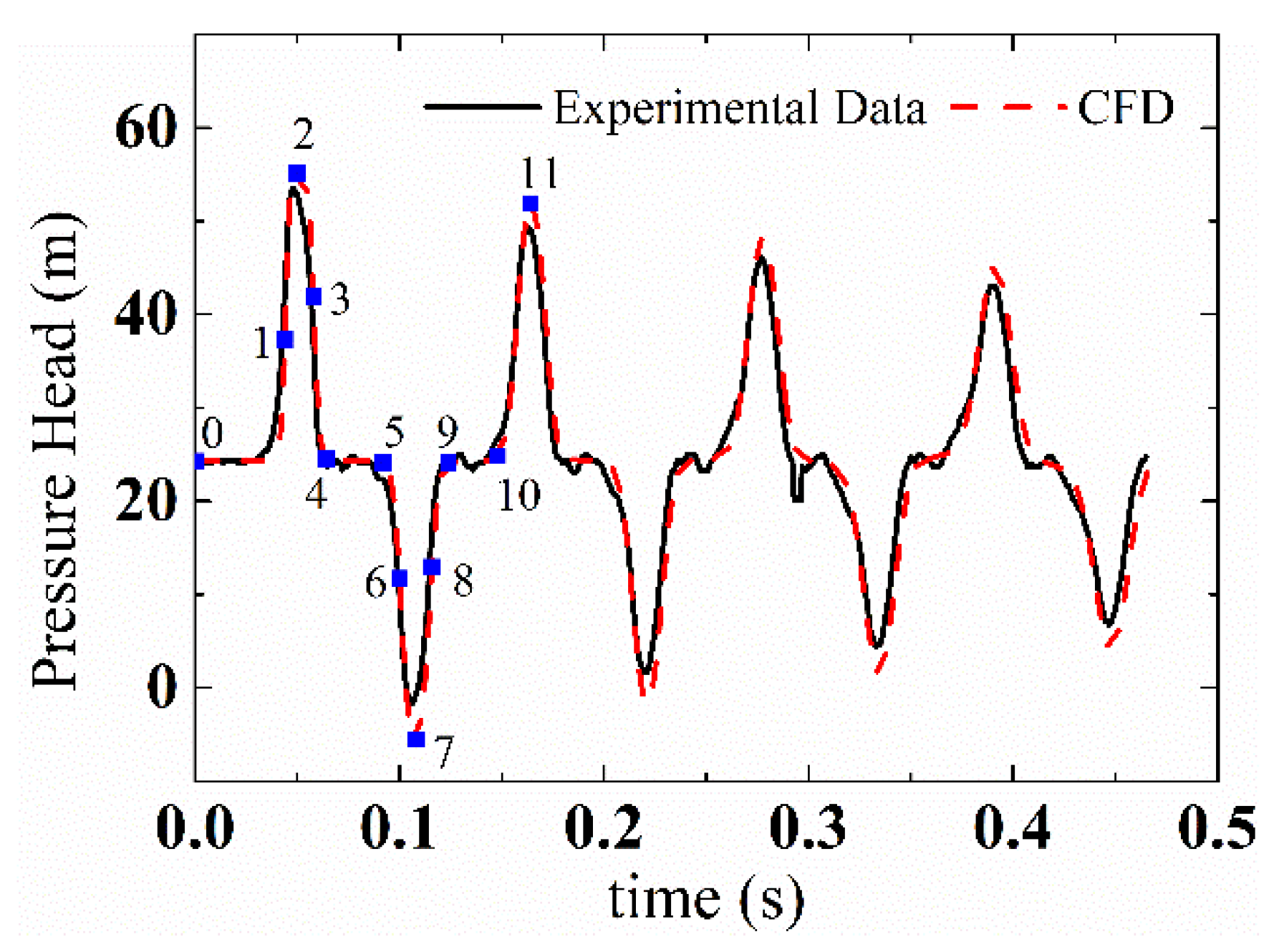
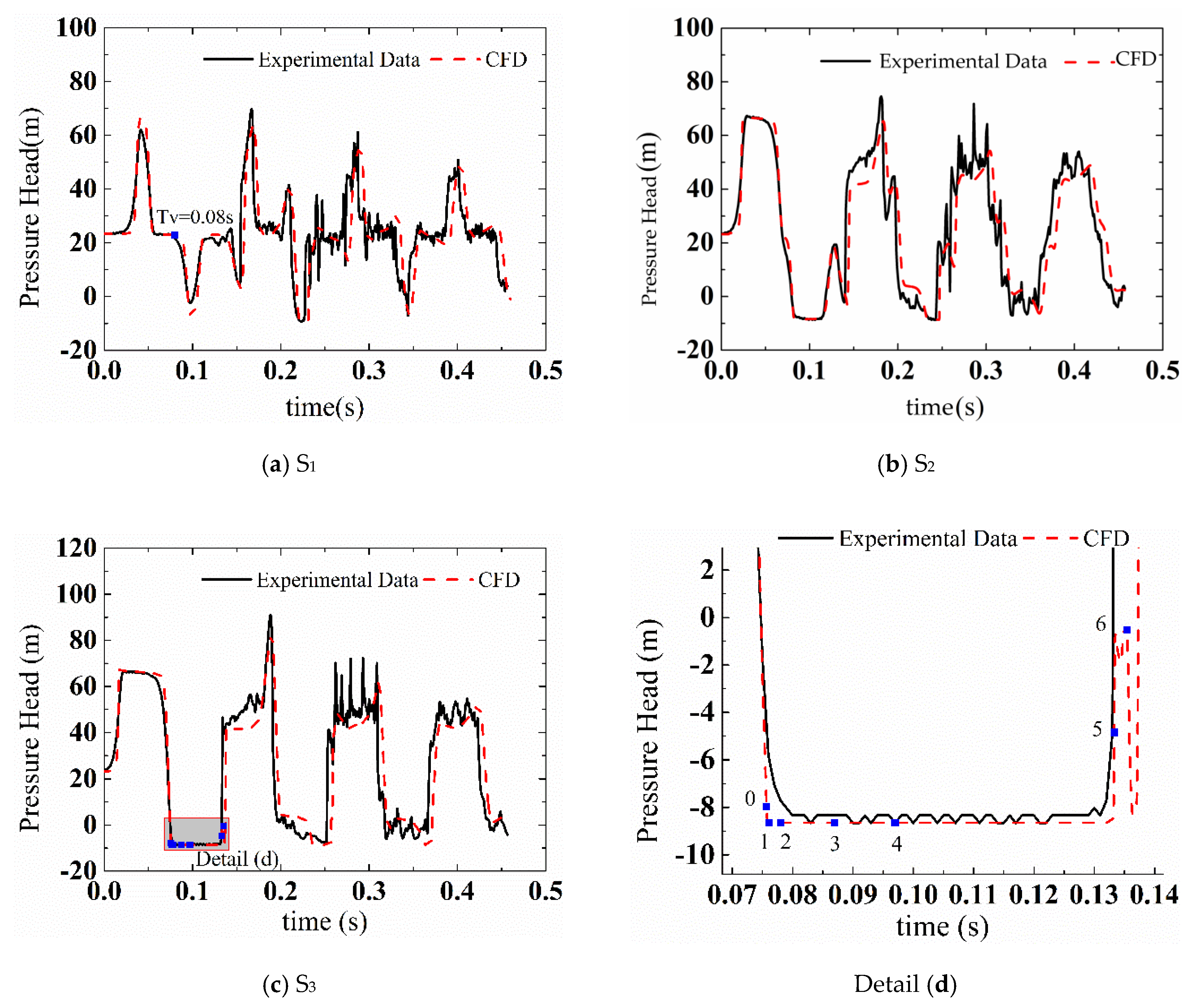
3.3.1. Analysis of the Pressure Fluctuation
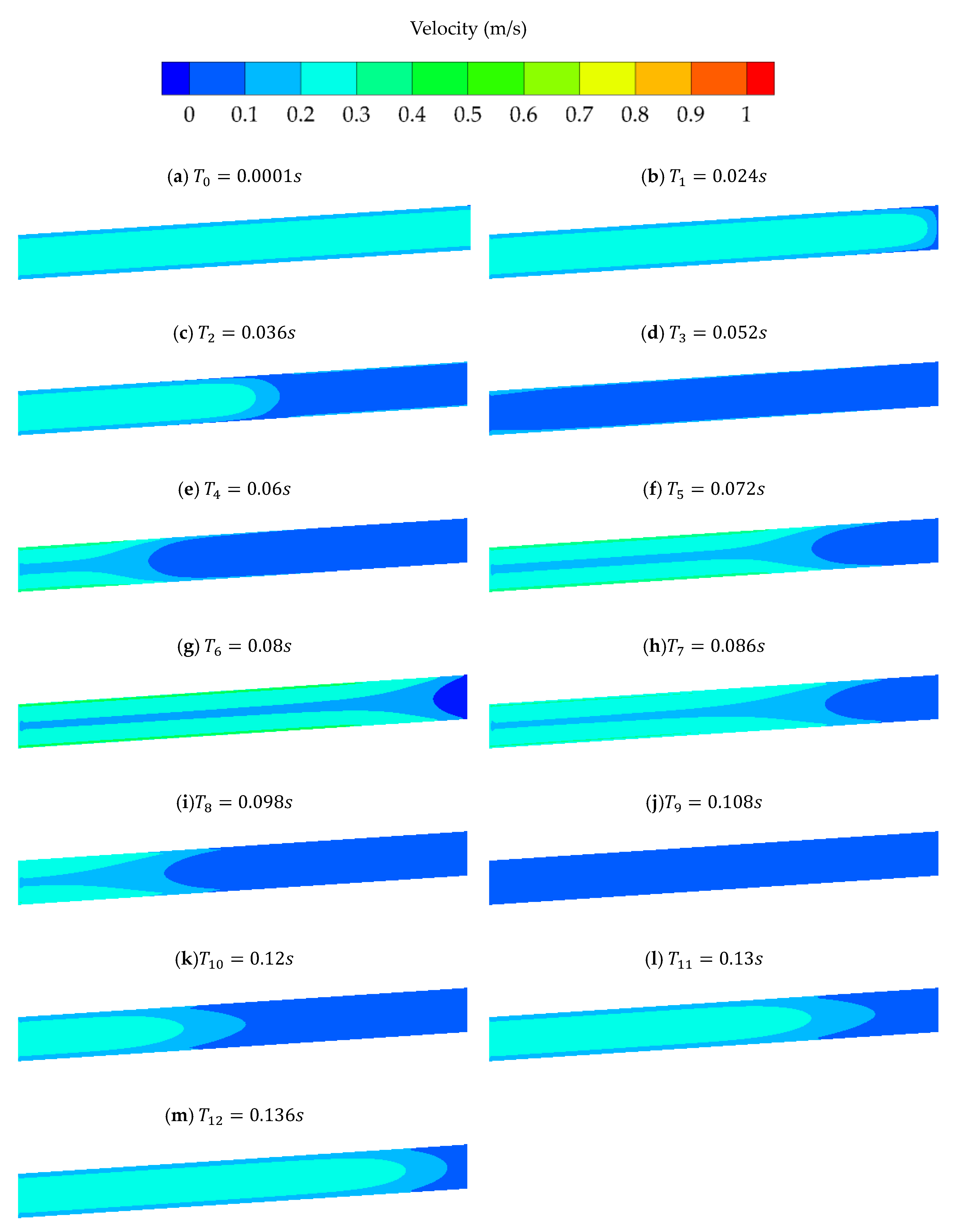
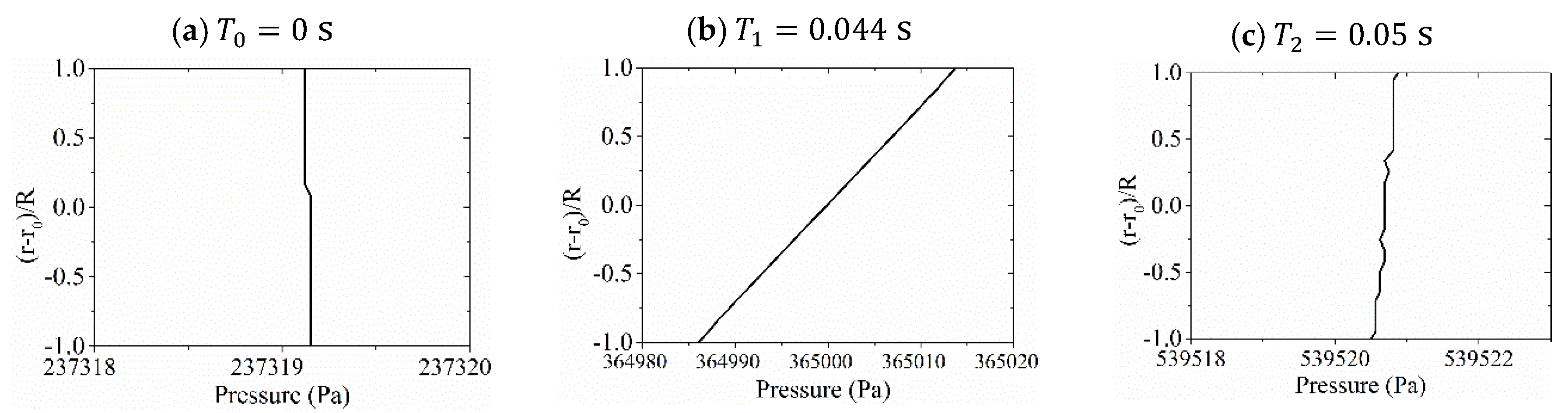
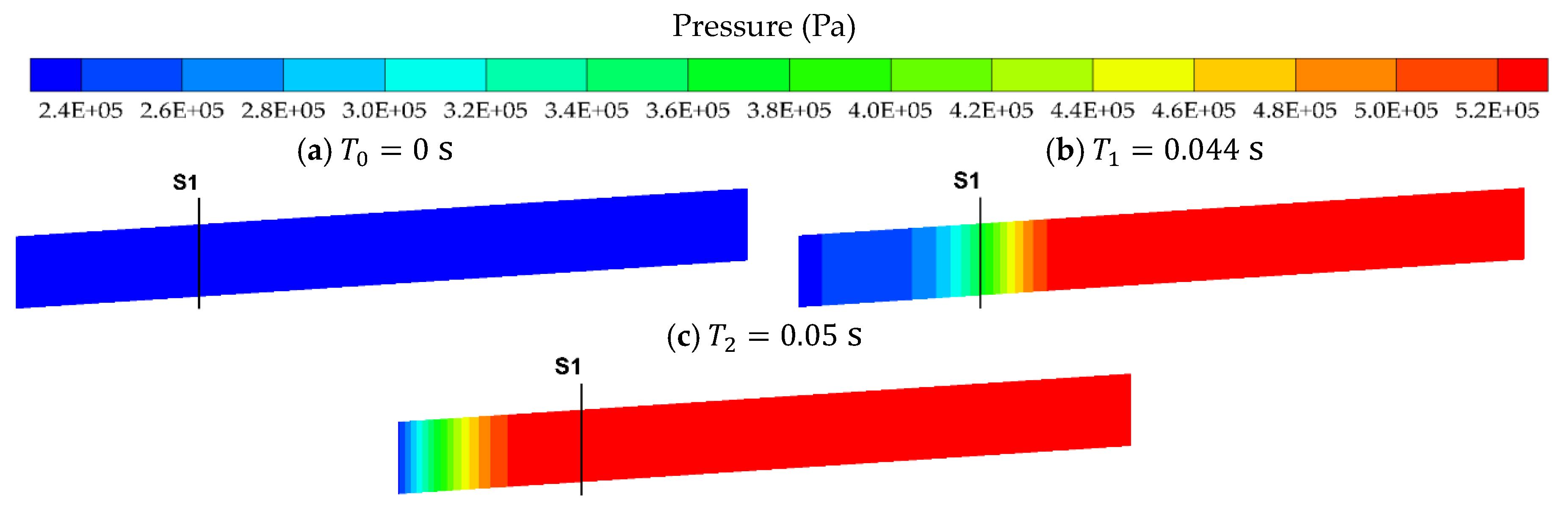
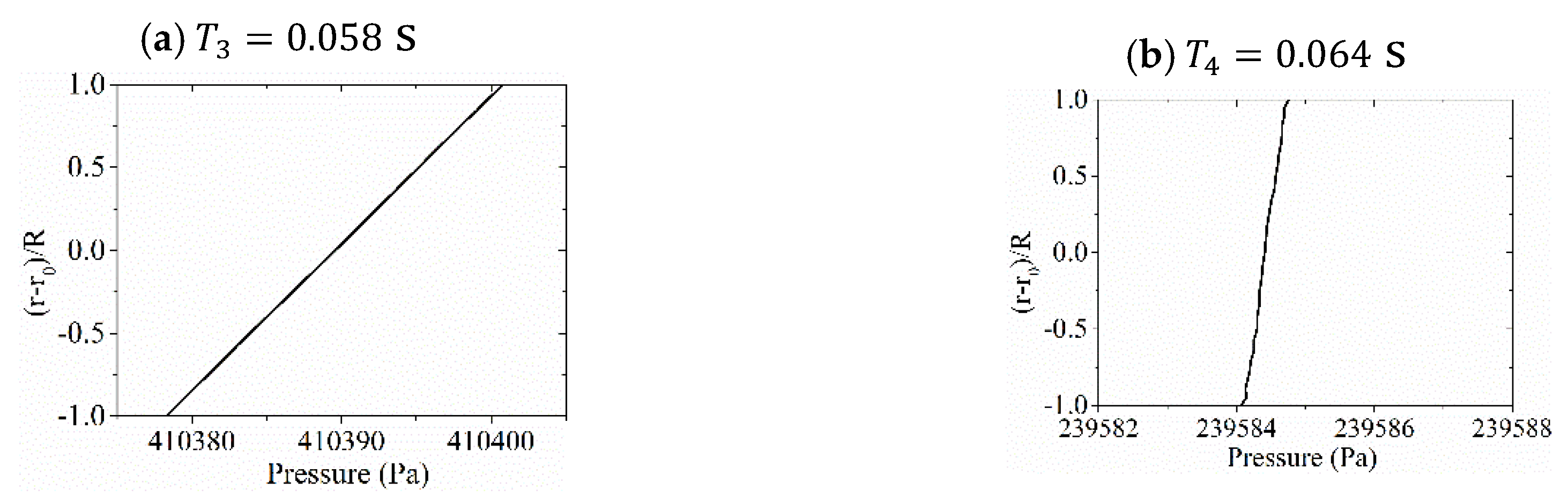
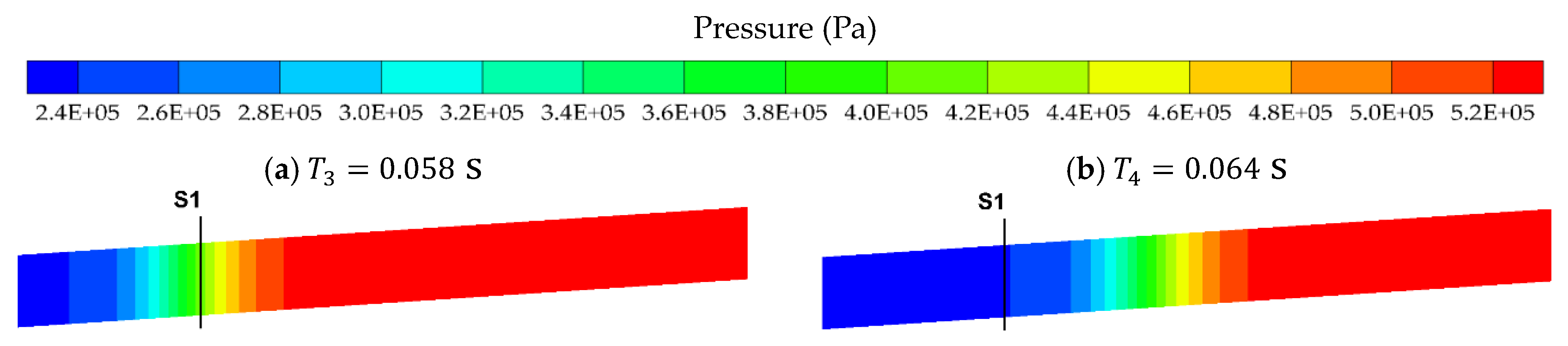
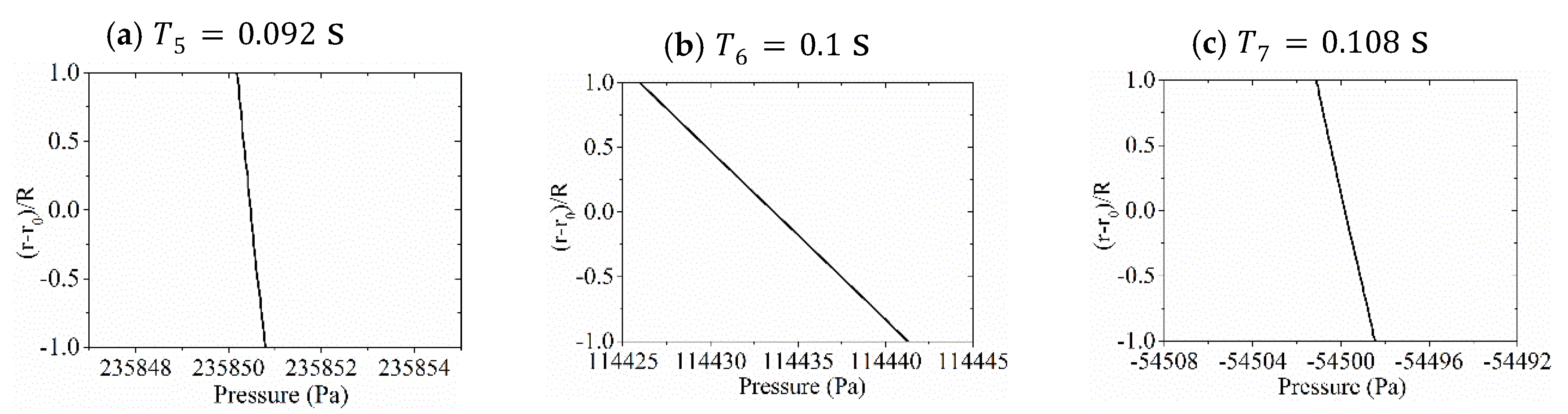
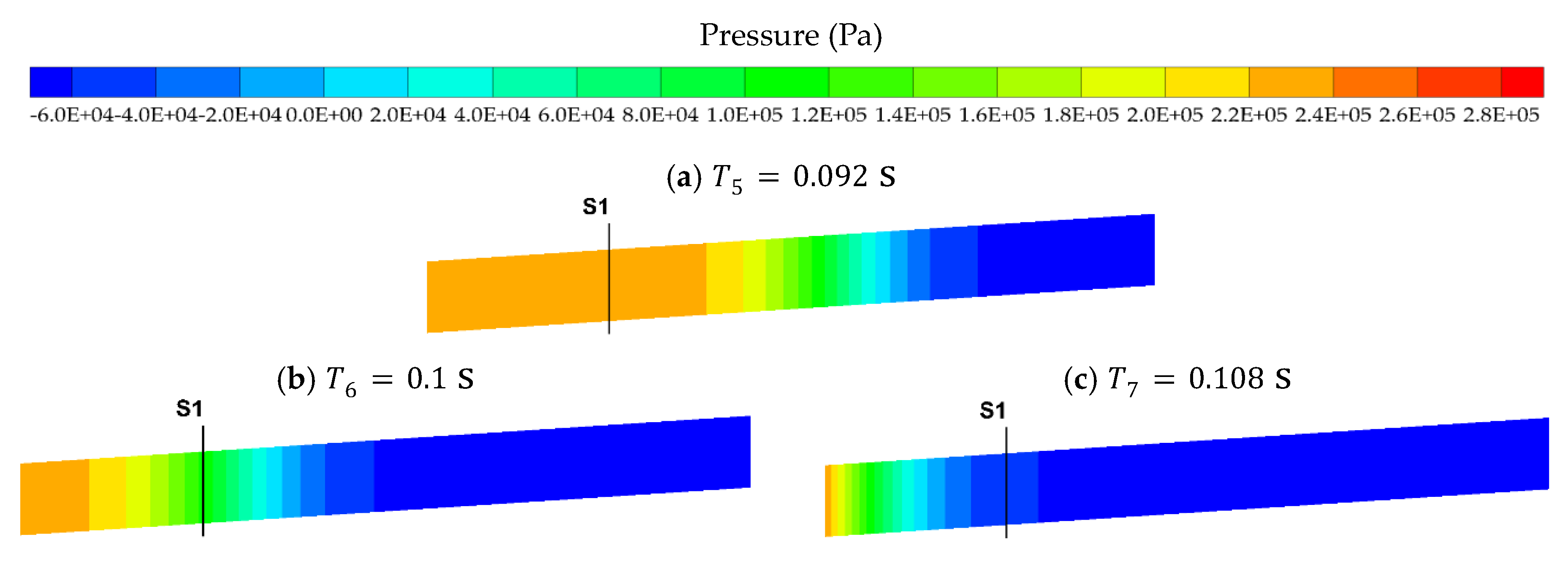
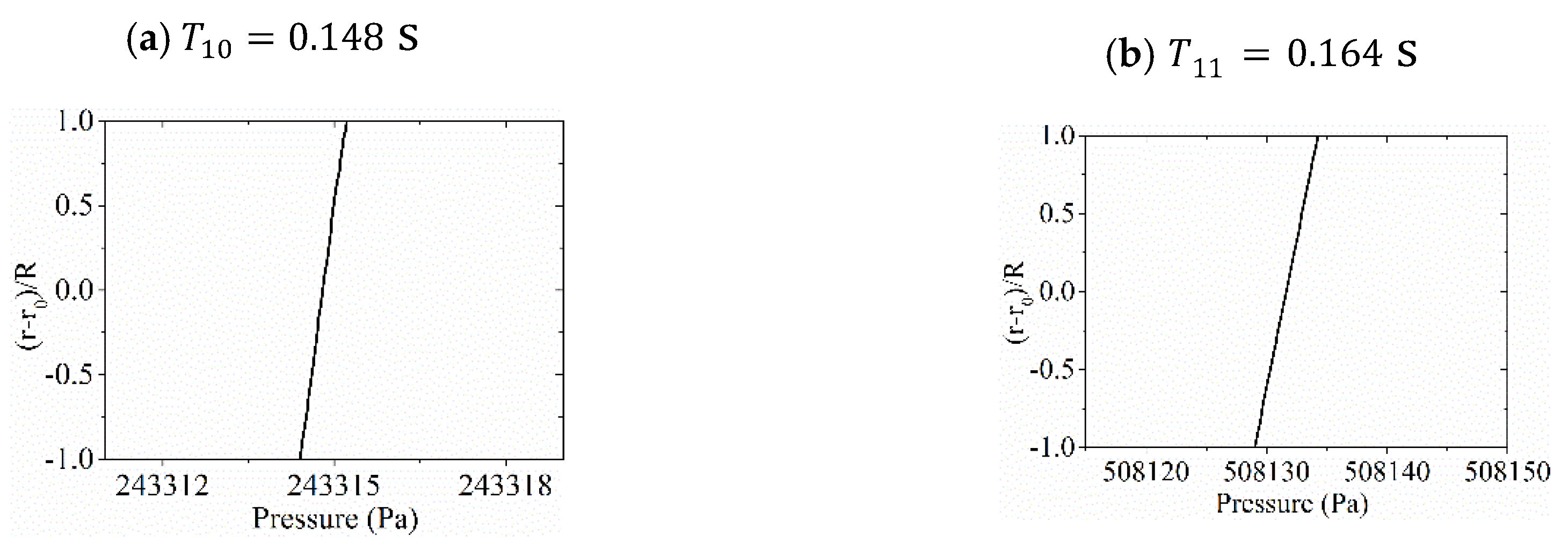
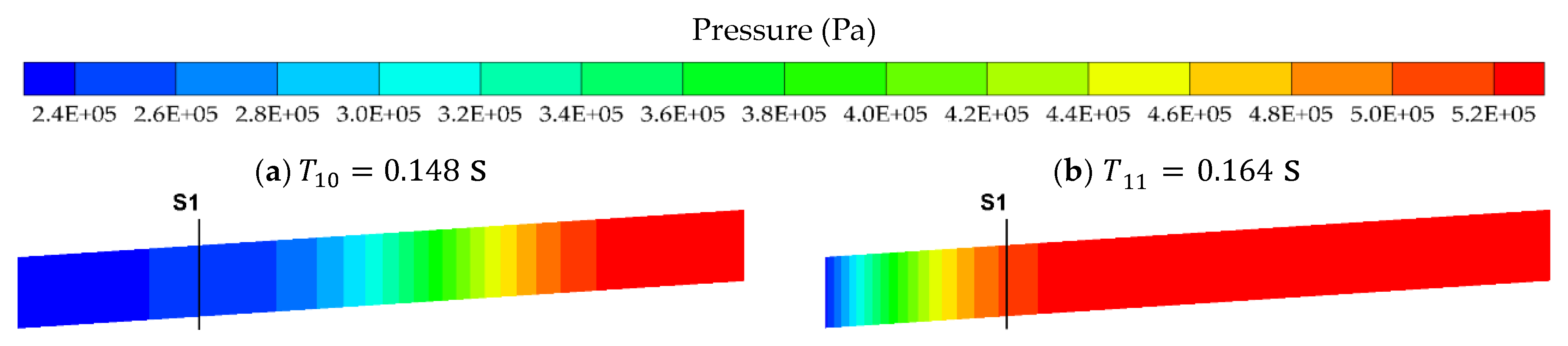
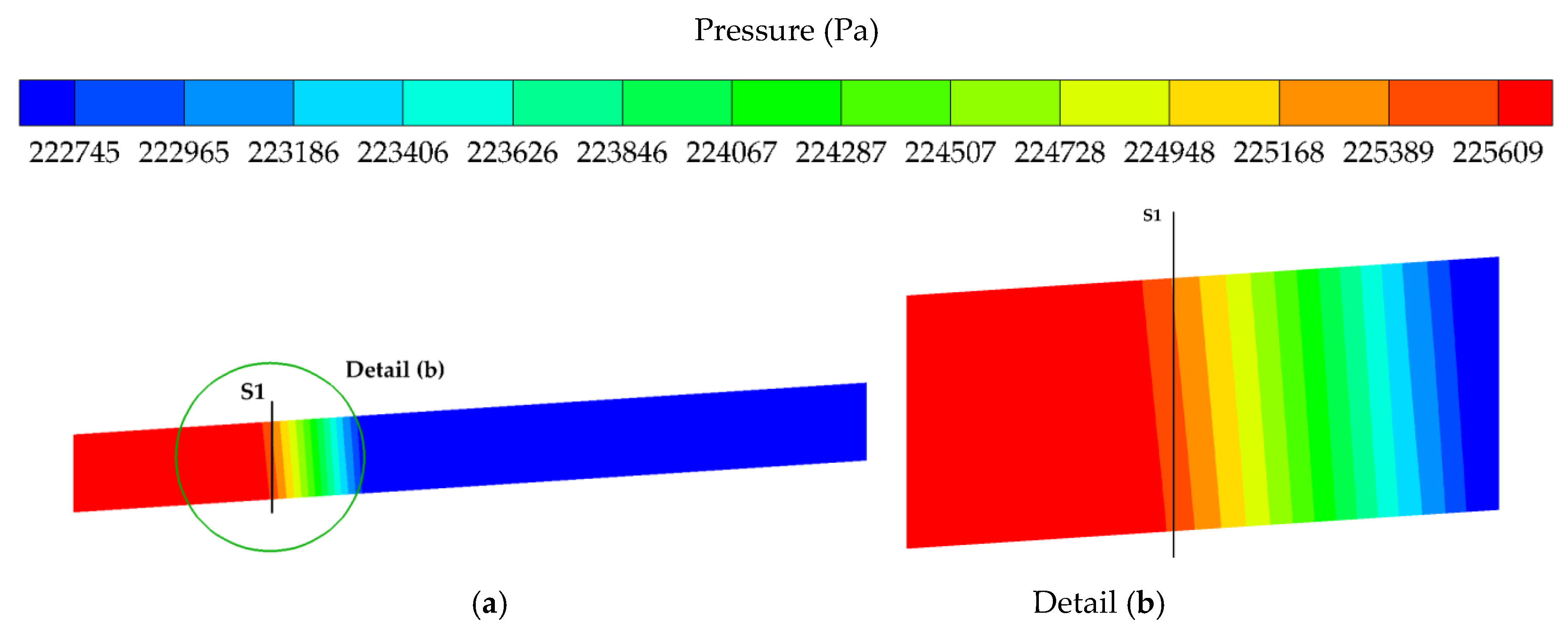
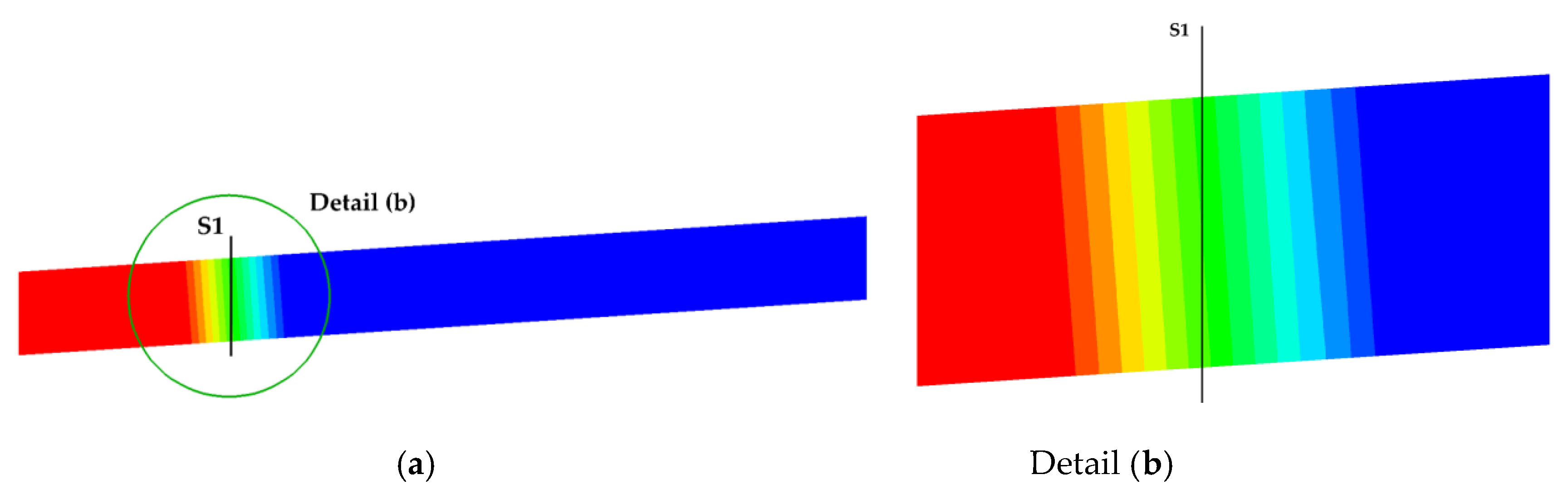
3.3.2. Analysis of the Pressure and Velocity Fields
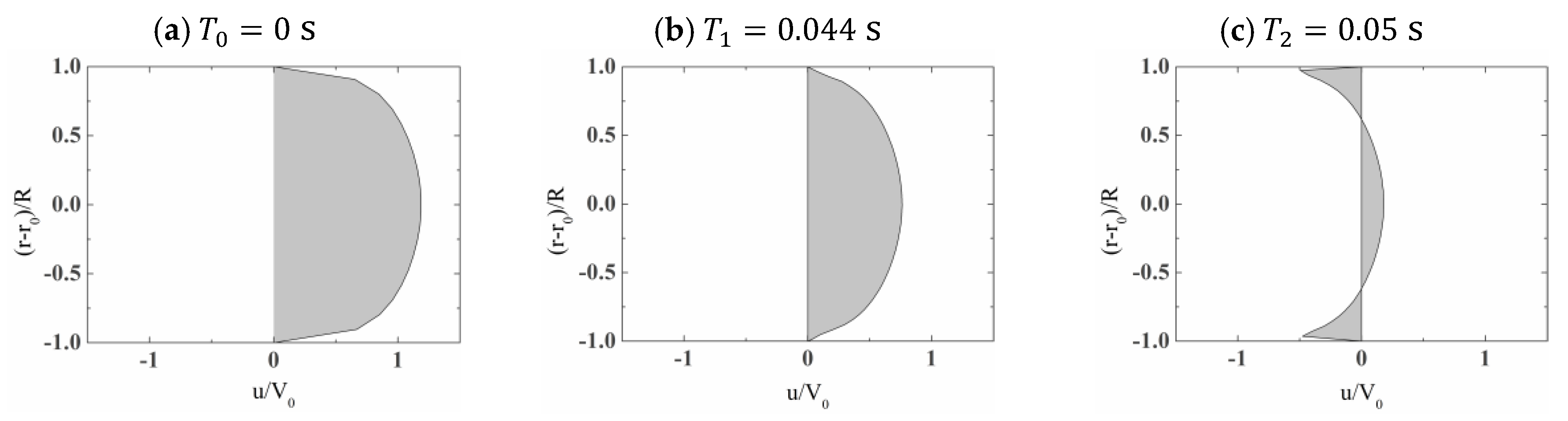
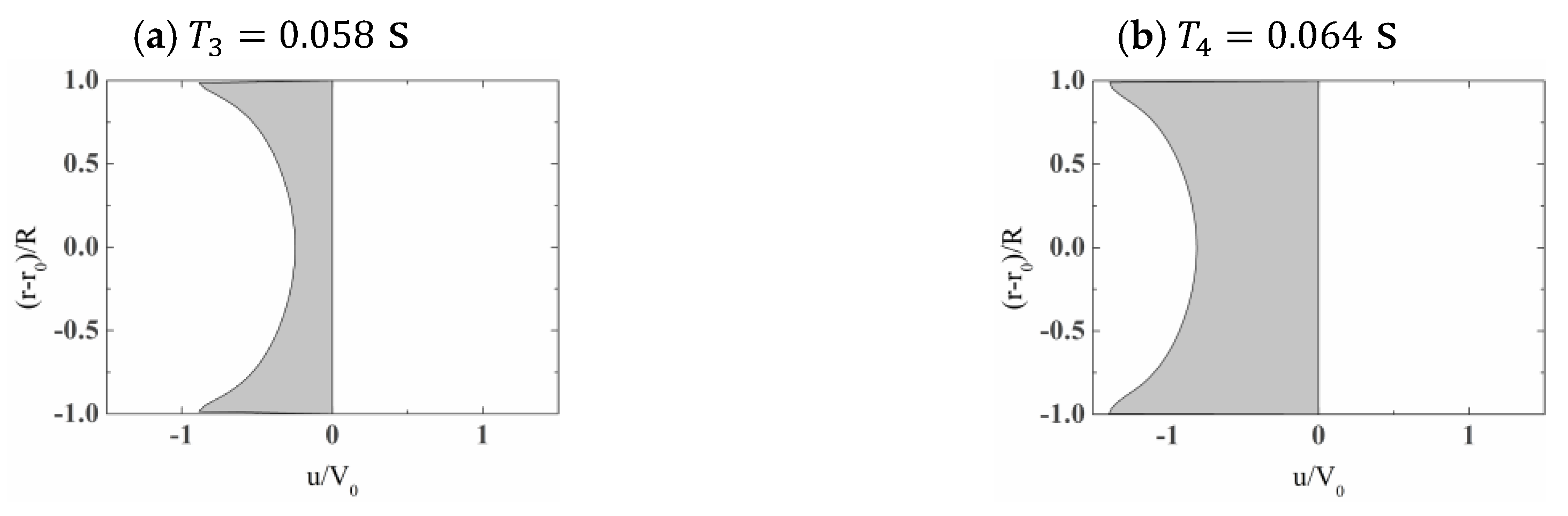
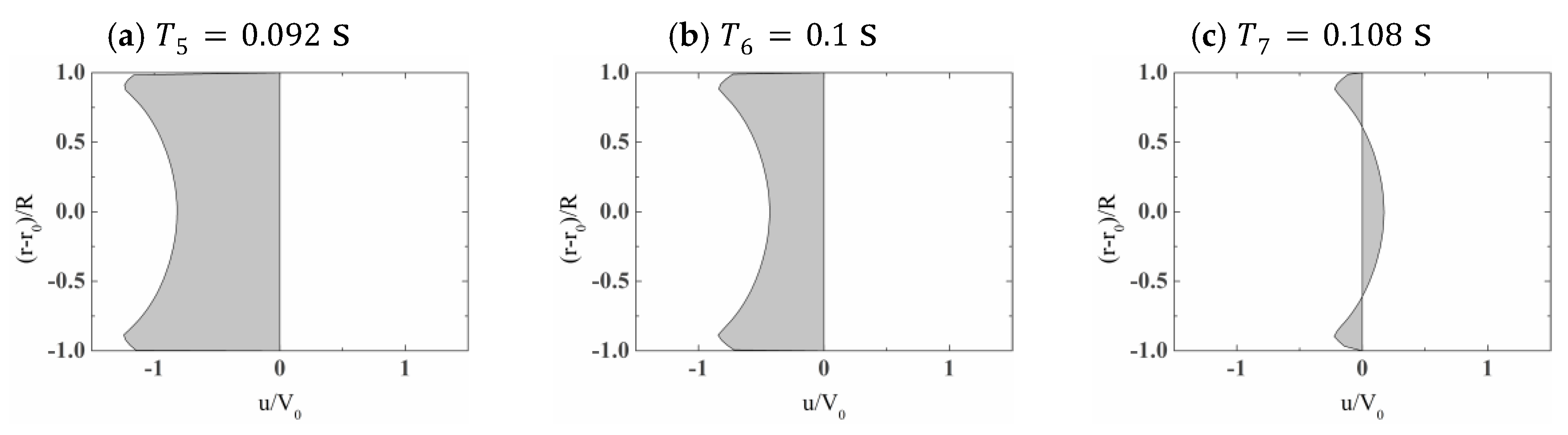
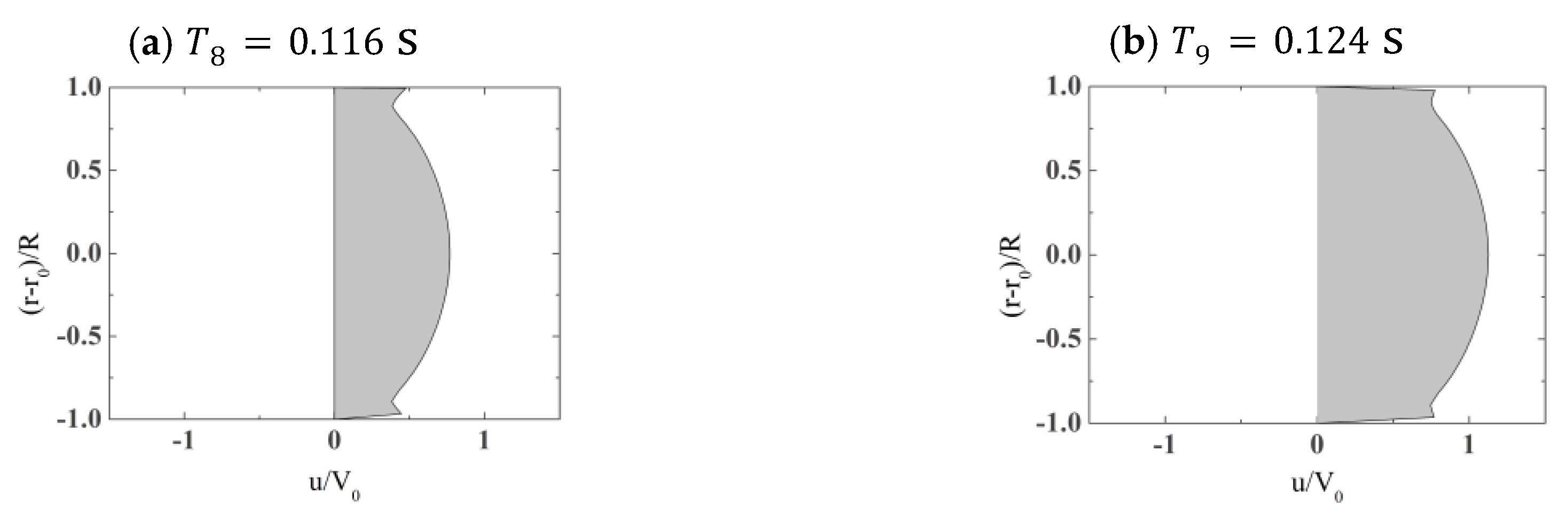
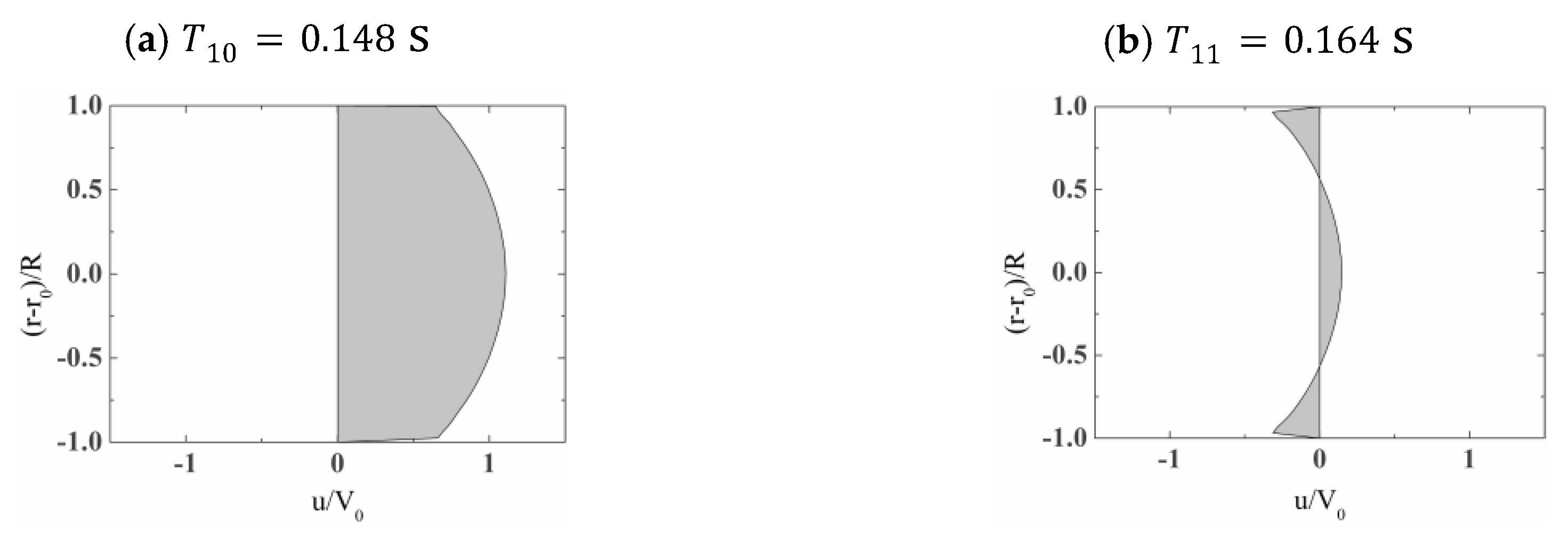
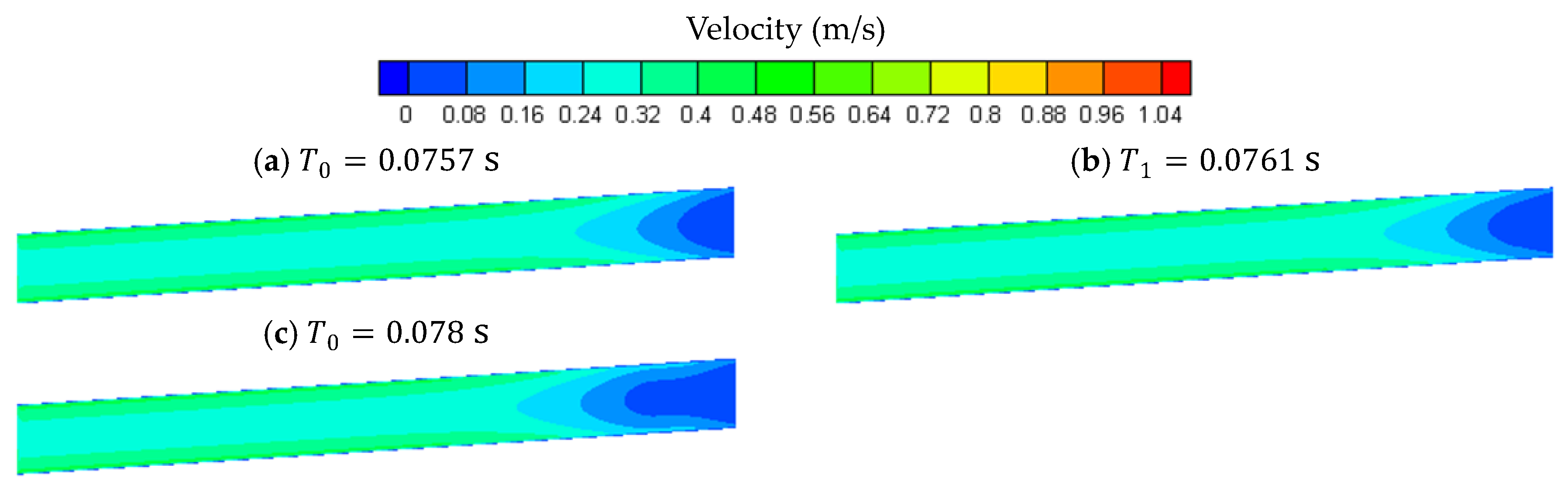
3.3.3. Analysis of the Velocity Distribution Change
3.4. Analysis of Transient Cavitation Flow Results
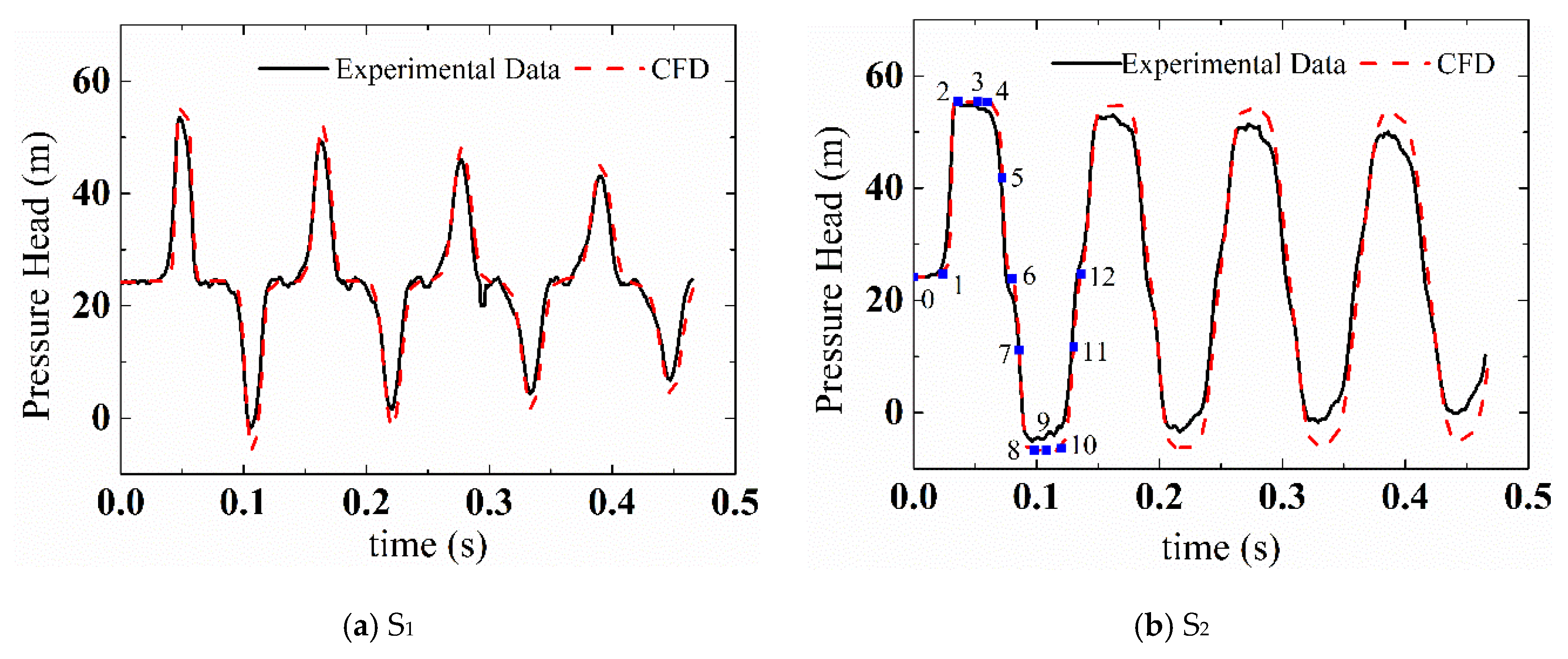
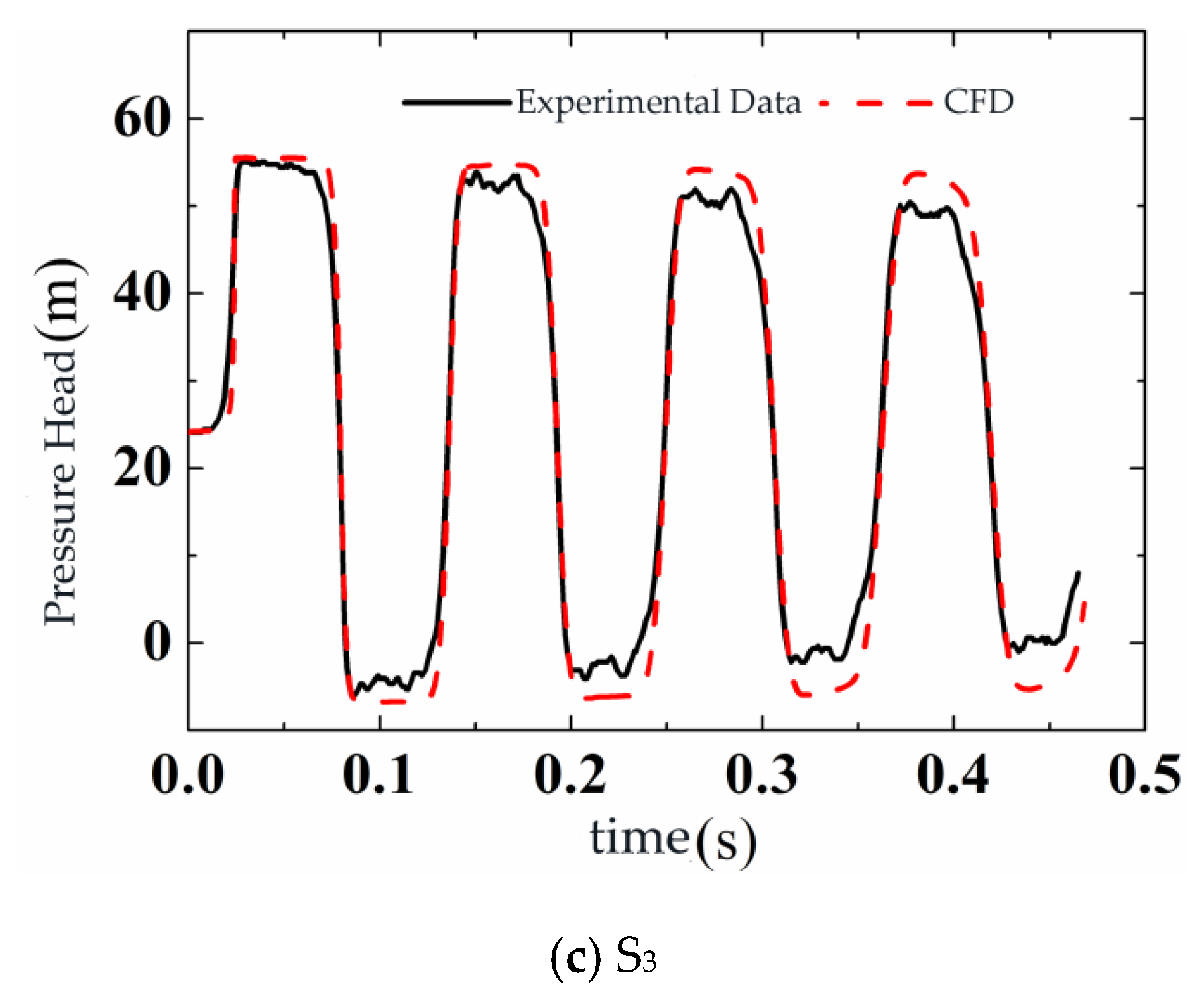
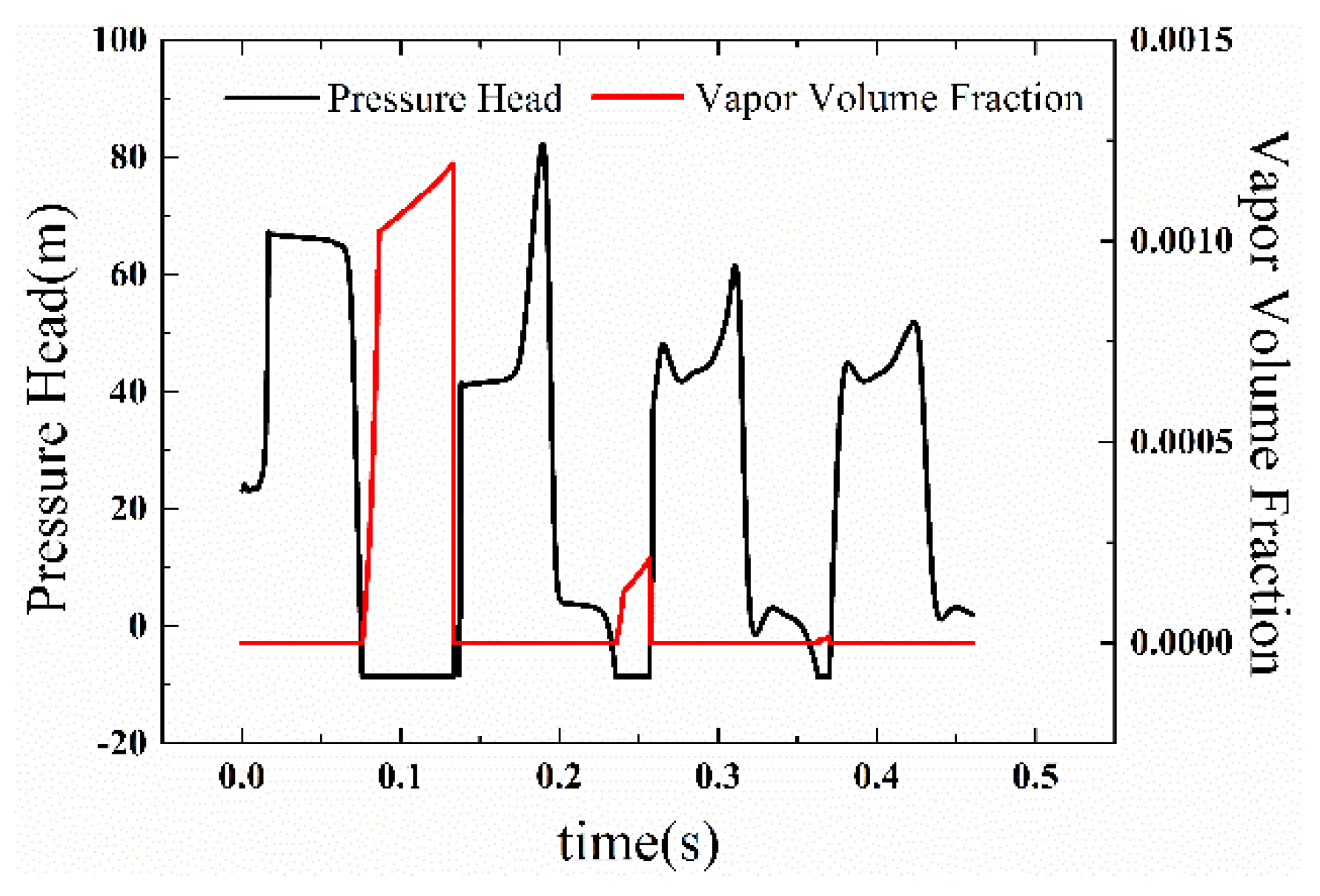
3.4.1. Analysis of the Pressure Fluctuation
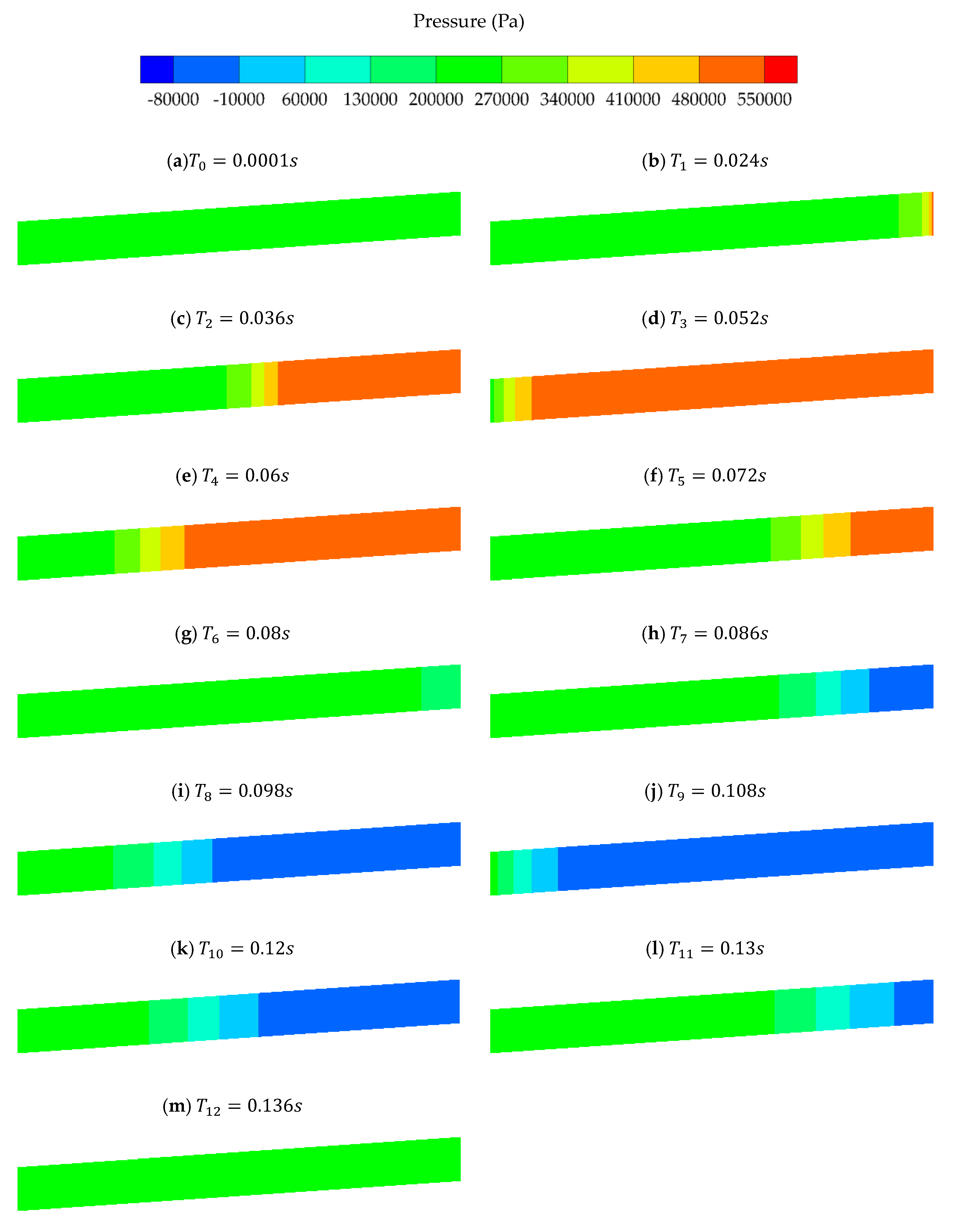
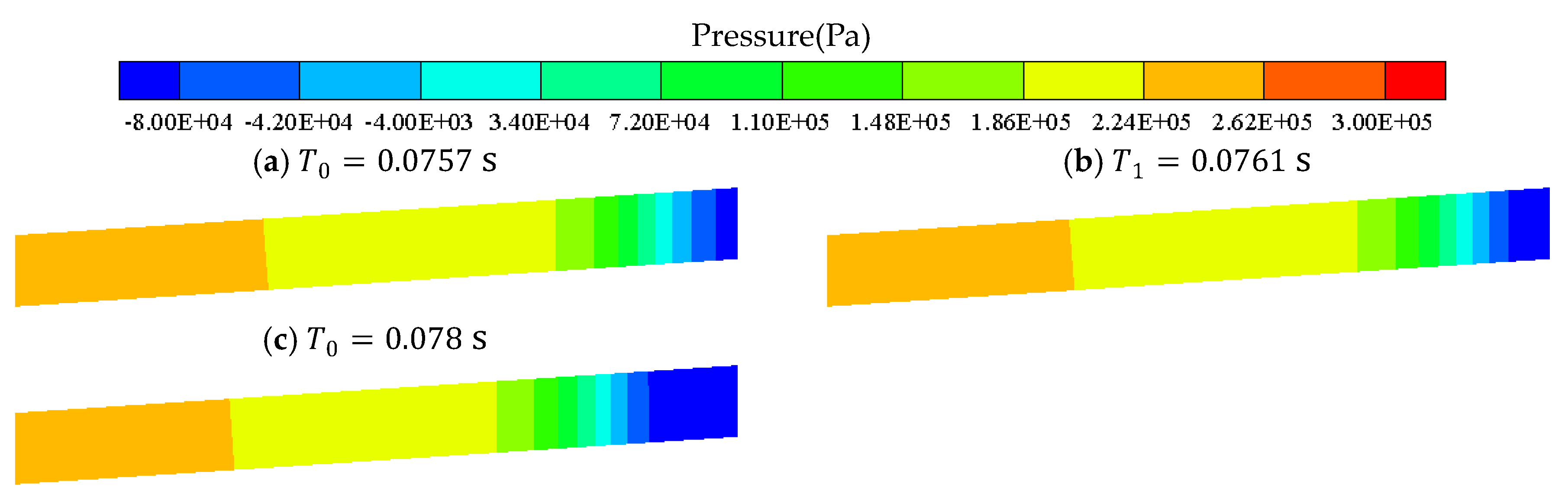
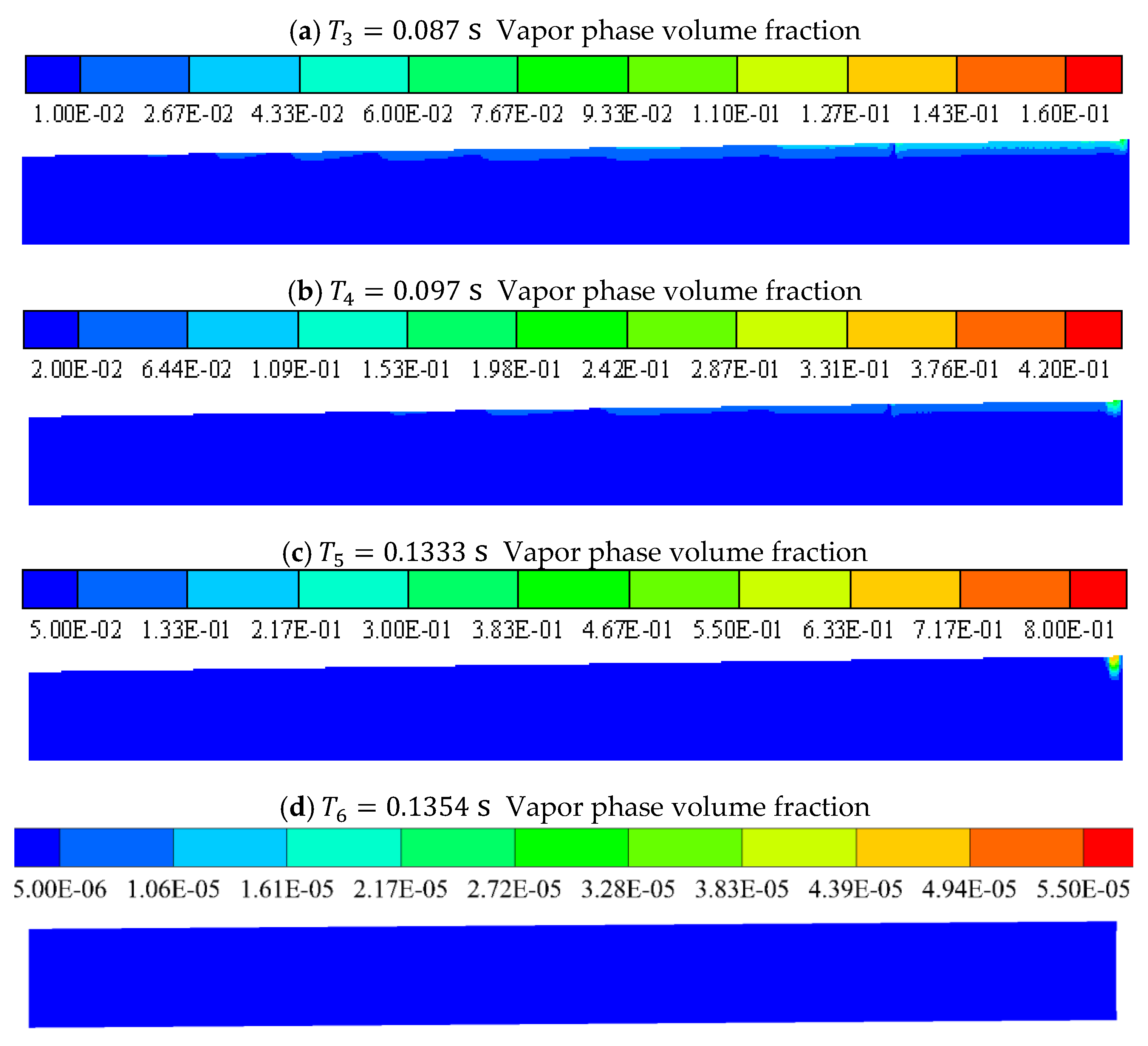
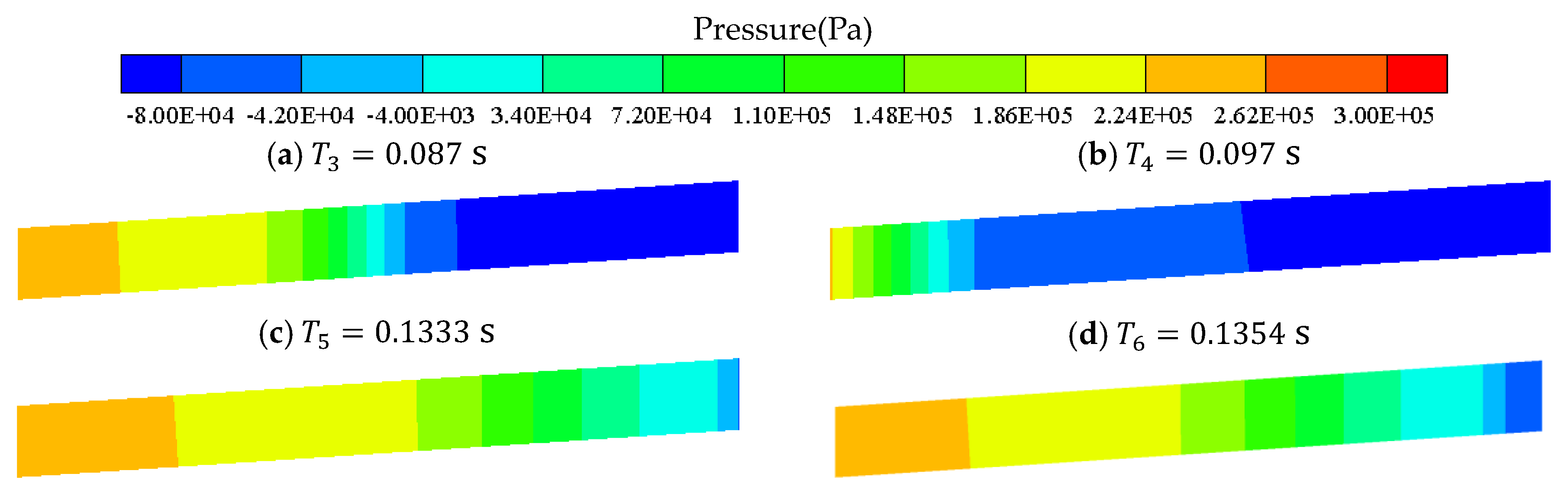
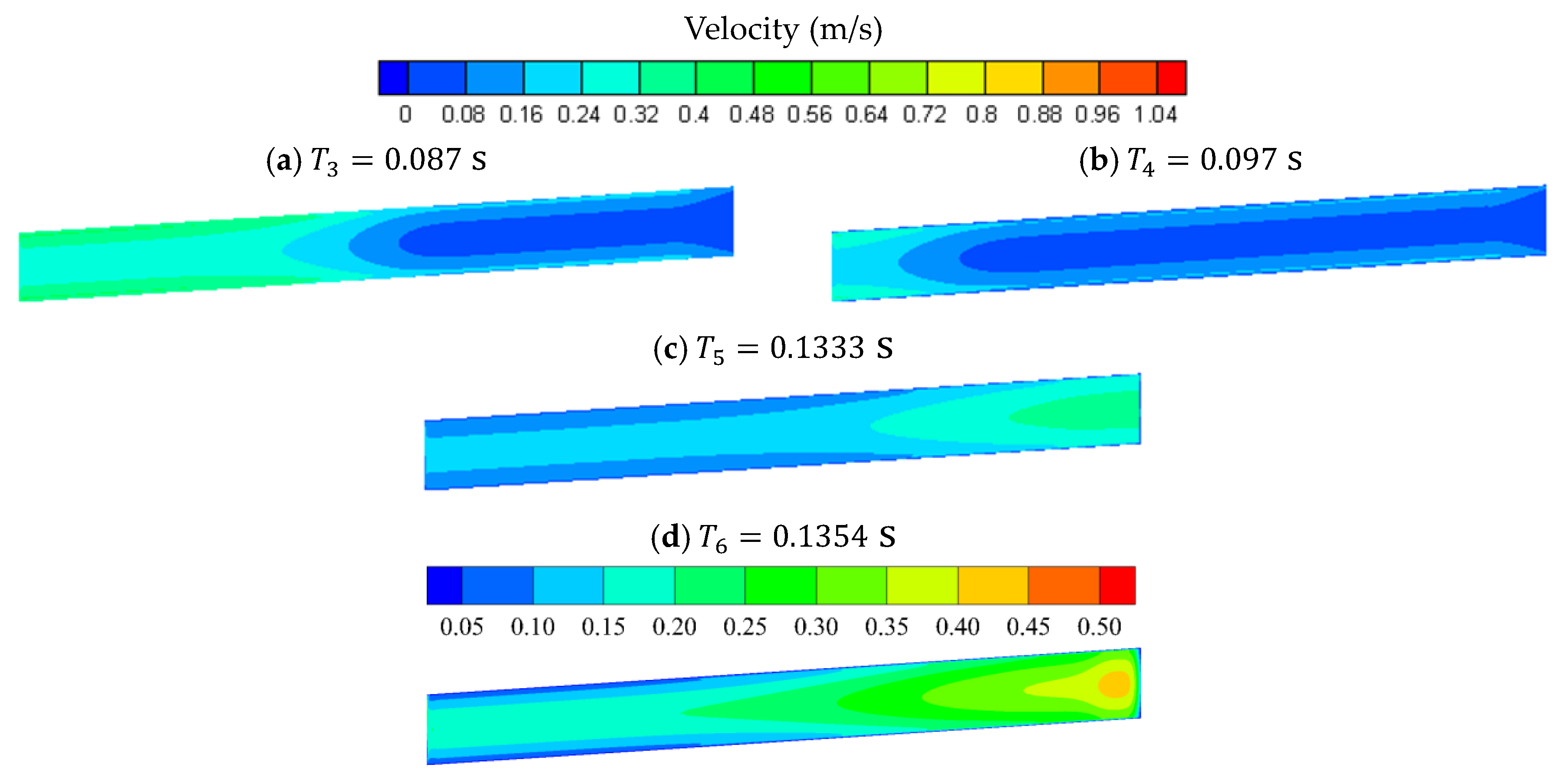
3.4.2. Analysis of the Vapor Volume Fraction and Pressure and Velocity Fields
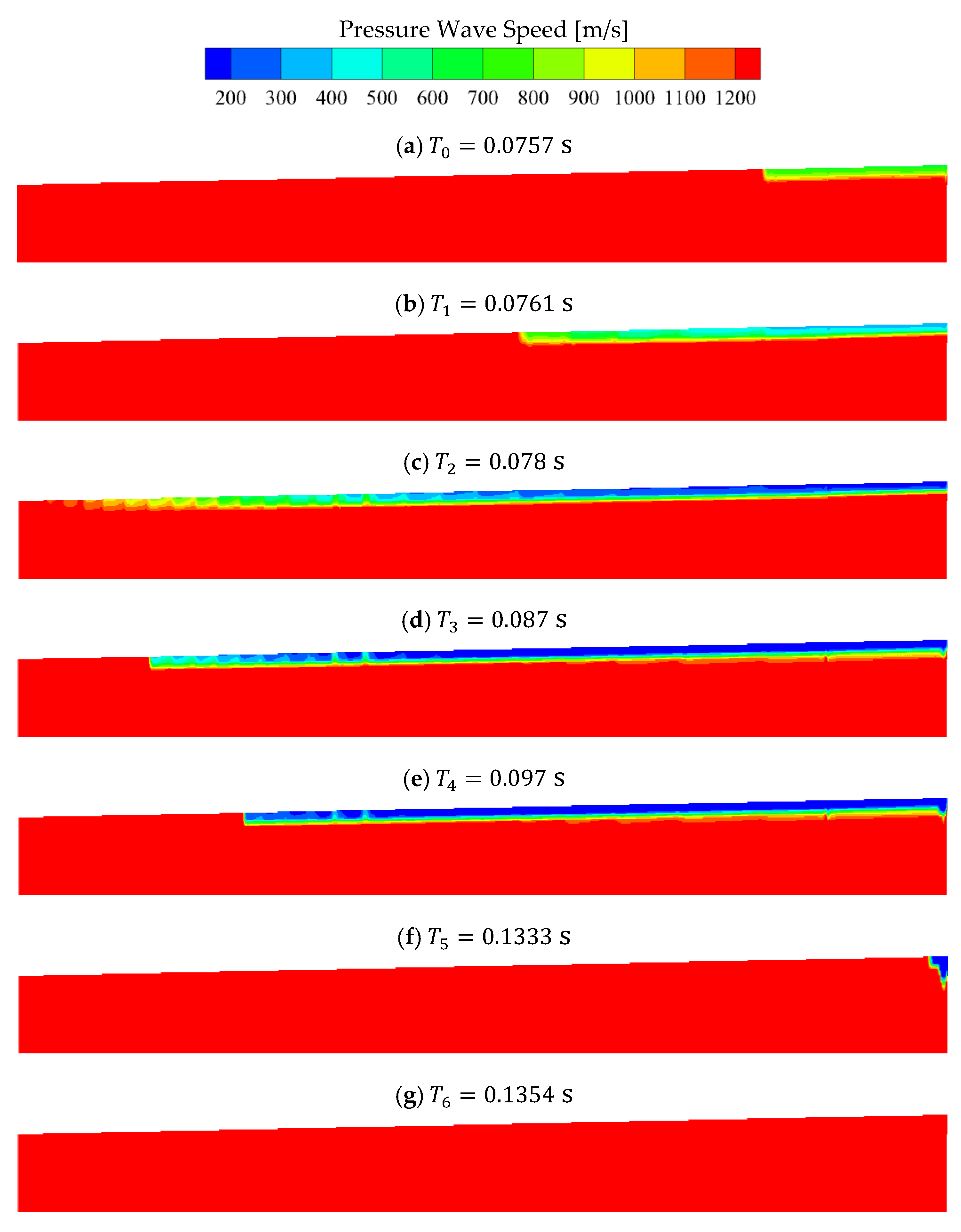
3.4.3. Analysis of the Variable Sound Speed Field in the Transient Cavitation Flow
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chaudhry, M.H. Applied Hydraulic Transients; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Simpson, A.R.; Bergant, A. Numerical Comparison of Pipe-Column-Separation Models. J. Hydraul. Eng. 1994, 120, 361–377. [Google Scholar] [CrossRef] [Green Version]
- Bergant, A.; Simpson, A.R. Pipeline Column Separation Flow Regimes. J. Hydraul. Eng. 1999, 125, 835–848. [Google Scholar] [CrossRef] [Green Version]
- Urbanowicz, K.; Zarzycki, Z.; Kudzma, S. Universal Weighting Function in Modeling Transient Cavitating Pipe Flow. J. Theor. Appl. Mech. 2012, 50, 889–902. [Google Scholar]
- Zhu, Y.; Duan, H.F.; Li, F.; Wu, C.G.; Yuan, Y.X.; Shi, Z.F. Experimental and Numerical Study on Transient Air–Water Mixing Flows in Viscoelastic Pipes. J. Hydraul. Res. 2018, 56, 877–887. [Google Scholar] [CrossRef]
- Gao, H.; Tang, X.; Li, X.; Shi, X. Analyses of 2D Transient Models for Vaporous Cavitating Flows in Reservoir-Pipeline-Valve Systems. J. Hydroinform. 2018, 20, 934–945. [Google Scholar] [CrossRef] [Green Version]
- Jang, T.U.; Wu, Y.; Xu, Y.; Newman, J.; Sun, Q. Efficient Quasi-Two-Dimensional Water Hammer Model on A Characteristic Grid. J. Hydraul. Eng. 2016, 142, 06016019. [Google Scholar] [CrossRef]
- Martins, N.M.C.; Delgado, J.N.; Ramos, H.M.; Newman, J. Maximum transient pressures in a rapidly filling pipeline with entrapped air using a CFD model. J. Hydraul. Res. 2017, 55, 506–519. [Google Scholar] [CrossRef]
- Martins, N.M.C.; Soares, A.K.; Ramos, H.M.; Covas, D.I.C. CFD modeling of transient flow in pressurized pipes. Comput. Fluids 2016, 126, 129–140. [Google Scholar] [CrossRef]
- Wang, C.; Nilsson, H.; Yang, J.; Petit, O. 1D–3D coupling for hydraulic system transient simulations. Comput. Phys. Commun. 2017, 210, 1–9. [Google Scholar] [CrossRef]
- Wu, D.; Yang, S.; Wu, P.; Wang, L. MOC-CFD Coupled Approach for the Analysis of the Fluid Dynamic Interaction between Water Hammer and Pump. J. Hydraul. Eng. 2015, 141, 06015003. [Google Scholar] [CrossRef]
- Yang, S.; Wu, D.; Lai, Z.; Du, T. Three-Dimensional Computational Fluid Dynamics Simulation of Valve-Induced Water Hammer. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 2263–2274. [Google Scholar] [CrossRef]
- Saemi, S.; Raisee, M.; Cervantes, M.J.; Nourbakhsh, A. Computation of Two- and Three-Dimensional Water Hammer Flows. J. Hydraul. Res. 2019, 57, 386–404. [Google Scholar] [CrossRef]
- Mandair, S.; Karney, B.; Magnan, R.; Morissette, J.F. Comparing Pure CFD and 1-D Solvers for the Classic Water Hammer Models of a Pipe-Reservoir System. In Proceedings of the WDSA/CCWI Joint Conference, Kingston, ON, Canada, 23–25 July 2018; Volume 1. [Google Scholar]
- Su, H.; Luo, Y.; Qu, L.; Feng, G. 3D CFD Simulation of Water Hammer in High Pressure Common Rail System of Diesel Engine. CSCBD 2019, 2019. [Google Scholar] [CrossRef] [Green Version]
- Heng, Z.; Zhijie, Z.; Wenbo, P. Research on Water Hammer Phenomenon during Stop Valve Closing Process Based on CFD. In Proceedings of the International Symposium on Big Data and Artificial Intelligence, Hong Kong, China, 29–30 December 2018. [Google Scholar] [CrossRef]
- Wang, J.; Wei, Z.; Gou, J.; Xiao, Q.; Li, S.; Li, Y. CFD Numerical Simulation of Water Hammer in a Vortex Diode. In Proceedings of the 2018 26th International Conference on Nuclear Engineering, London, UK, 22–26 July 2018. [Google Scholar] [CrossRef]
- Ioriatti, M.; Dumbser, M.; Iben, U. A Comparison of Explicit and Semi-Implicit Finite Volume Schemes for Viscous Compressible Flows in Elastic Pipes in Fast Transient Regime. ZAMM J. Appl. Math. Mech. 2017. [Google Scholar] [CrossRef]
- Urbanowicz, K. Fast and Accurate Modelling of Frictional Transient Pipe Flow. ZAMM J. Appl. Math. Mech. 2018, 98, 802–823. [Google Scholar] [CrossRef]
- Schohl, G.A. Improved Approximate Method for Simulating Frequency-Dependent Friction in Transient Laminar Flow. J. Fluids Eng. 1993, 115, 420–424. [Google Scholar] [CrossRef]
- Vardy, A.E.; Brown, J.M.B.; He, S.; Ariyaratne, C.; Gorji, S. Applicability of Frozen-Viscosity Models of Unsteady Wall Shear Stress. J. Hydraul. Eng. 2014, 141, 04014064. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Bi, H.; Karney, B.; Wang, Z. Three-dimensional transient simulation of a prototype pump-turbine during normal turbine shutdown. J. Hydraul. Res. 2017, 55, 520–537. [Google Scholar] [CrossRef]
- Zhang, X.; Cheng, Y.; Xia, L.; Yang, J. CFD simulation of reverse water-hammer induced by collapse of draft-tube cavity in a model pump-turbine during runaway process. IOP Conference Series: Earth and Environmental Science. IOP Publ. 2016, 49, 052017. [Google Scholar]
- Zhang, J.; Zhang, Y.W. Analysis on hydrodynamic characteristic and cavity form of high-speed projectile with small angle of attack. In Proceedings of the Second International Conference on Mechanic Automation & Control Engineering, Hohhot, China, 15–17 July 2011. [Google Scholar]
- Schnerr, G.H.; Sauer, J. Physical and numerical modeling of unsteady cavitation dynamics. In Proceedings of the Fourth International Conference on Multiphase Flow, New Orleans, LA, USA, 27 May–1 June 2001. [Google Scholar]
- Song, C.C.S.; Yuan, M. A weakly compressible flow model and rapid convergence methods. J. Fluids Eng. 1988, 110, 441–445. [Google Scholar] [CrossRef]
- Coutier-Delgosha, O.; Fortes-Patella, R.; Reboud, J.L. Simulation of unsteady cavitation with a two-equation turbulence model including compressibility effects. J. Turbul. 2002, 3, 58–65. [Google Scholar] [CrossRef] [Green Version]
- Coutier-Delgosha, O.; Reboud, J.L.; Delannoy, Y. Numerical simulation of the unsteady behaviour of cavitating flows. Int. J. Numer. Methods Fluids 2003, 42, 527–548. [Google Scholar]
- Li, D.Q.; Grekula, M.; Lindell, P. A modified SST k-ω turbulence model to predict the steady and unsteady sheet cavitation on 2D and 3D hydrofoils. In Proceedings of the 7th International Symposium on Cavitation, Ann Arbor, MI, USA, 16–20 August 2009. [Google Scholar]
- Li, Z.; Pourquie, M.; Van Terwisga, T.J.C. A numerical study of steady and unsteady cavitation on a 2D hydrofoil. J. Hydrodyn. 2010, 22, 728–735. [Google Scholar] [CrossRef]
- Tullis, J.P. Fundamentals of Cavitation; Springer: Dordrecht, The Netherlands, 2005. [Google Scholar]
- Simpson, A.R. Large Water Hammer Pressure Due to Column Separation in Sloping Pipes; University of Michigan: Ann Arbor, MI, USA, 1986. [Google Scholar]
- Wylie, E.B.; Streeter, V.L. Fluid Transients; McGraw-Hill Book Co.: New York, NY, USA, 1983. [Google Scholar]






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment No. | Initial Velocity (m/s) | Initial Reynolds Number | Water Level of Upstream Reservoir (m) |
|---|---|---|---|
| Experiment 1 | 0.239 | 4531 | 24.30 |
| Experiment 2 | 0.332 | 6294 | 23.41 |
| Case No. | Initial Velocity (m/s) | Pressure of Inlet (Pa) | Pressure of Outlet (Pa) | Valve Closing Time (ms) |
|---|---|---|---|---|
| Case 1 | 0.239 | 237,739.7 | 235,960.4 | 24 |
| Case 2 | 0.332 | 229,060.1 | 225,776.9 | 16 |
| Time Node | Time(s) | In Terms of and |
|---|---|---|
| 0.024 | ||
| 0.036 | ||
| 0.052 | ||
| 0.06 | ||
| 0.072 | ||
| 0.08 | ||
| 0.086 | ||
| 0.098 | ||
| 0.108 | ||
| 0.12 | ||
| 0.13 | ||
| 0.136 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Duan, X.; Gao, H.; Li, X.; Shi, X. CFD Investigations of Transient Cavitation Flows in Pipeline Based on Weakly-Compressible Model. Water 2020, 12, 448. https://doi.org/10.3390/w12020448
Tang X, Duan X, Gao H, Li X, Shi X. CFD Investigations of Transient Cavitation Flows in Pipeline Based on Weakly-Compressible Model. Water. 2020; 12(2):448. https://doi.org/10.3390/w12020448
Chicago/Turabian StyleTang, Xuelin, Xiangyu Duan, Hui Gao, Xiaoqin Li, and Xiaoyan Shi. 2020. "CFD Investigations of Transient Cavitation Flows in Pipeline Based on Weakly-Compressible Model" Water 12, no. 2: 448. https://doi.org/10.3390/w12020448
APA StyleTang, X., Duan, X., Gao, H., Li, X., & Shi, X. (2020). CFD Investigations of Transient Cavitation Flows in Pipeline Based on Weakly-Compressible Model. Water, 12(2), 448. https://doi.org/10.3390/w12020448