Application of Wavelet De-Noising for Travel-Time Based Hydraulic Tomography


 ,
,
Abstract
:1. Introduction
2. Methodology
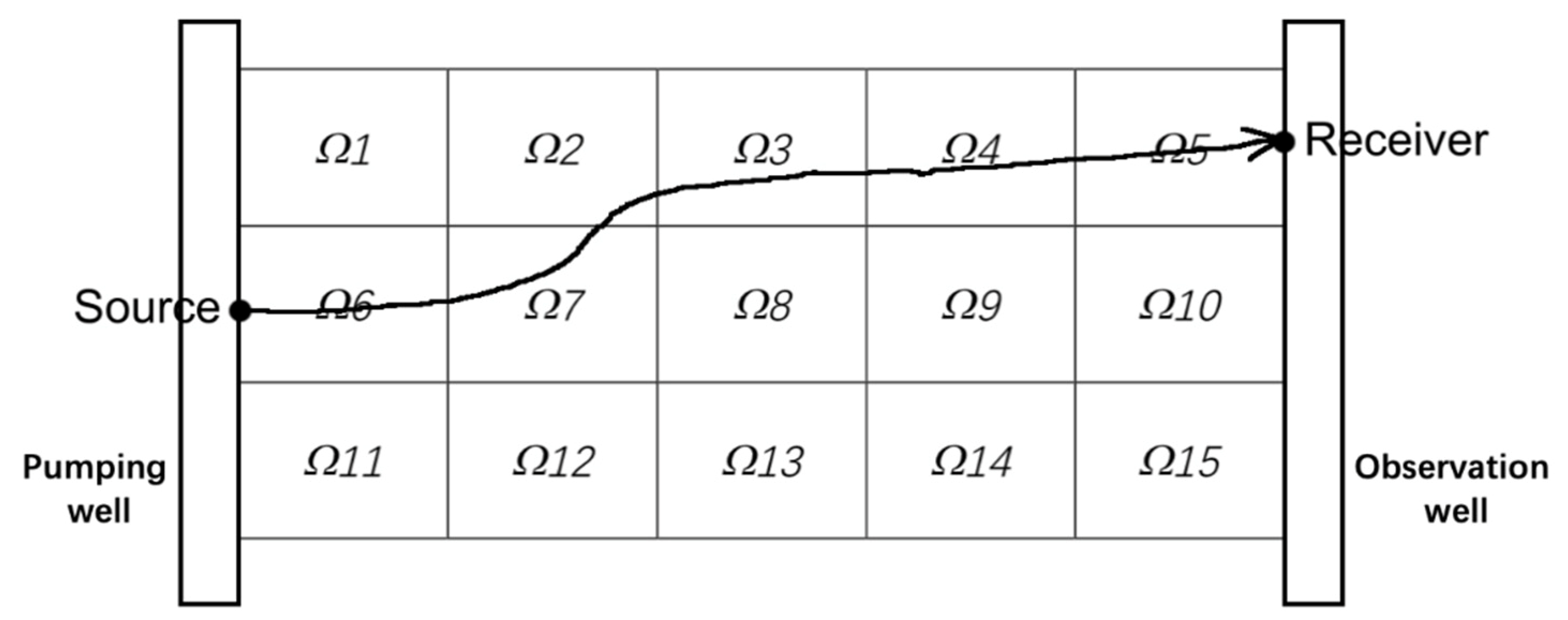
2.1. Hydraulic Travel Time Inversion
2.2. SIRT Algorithm
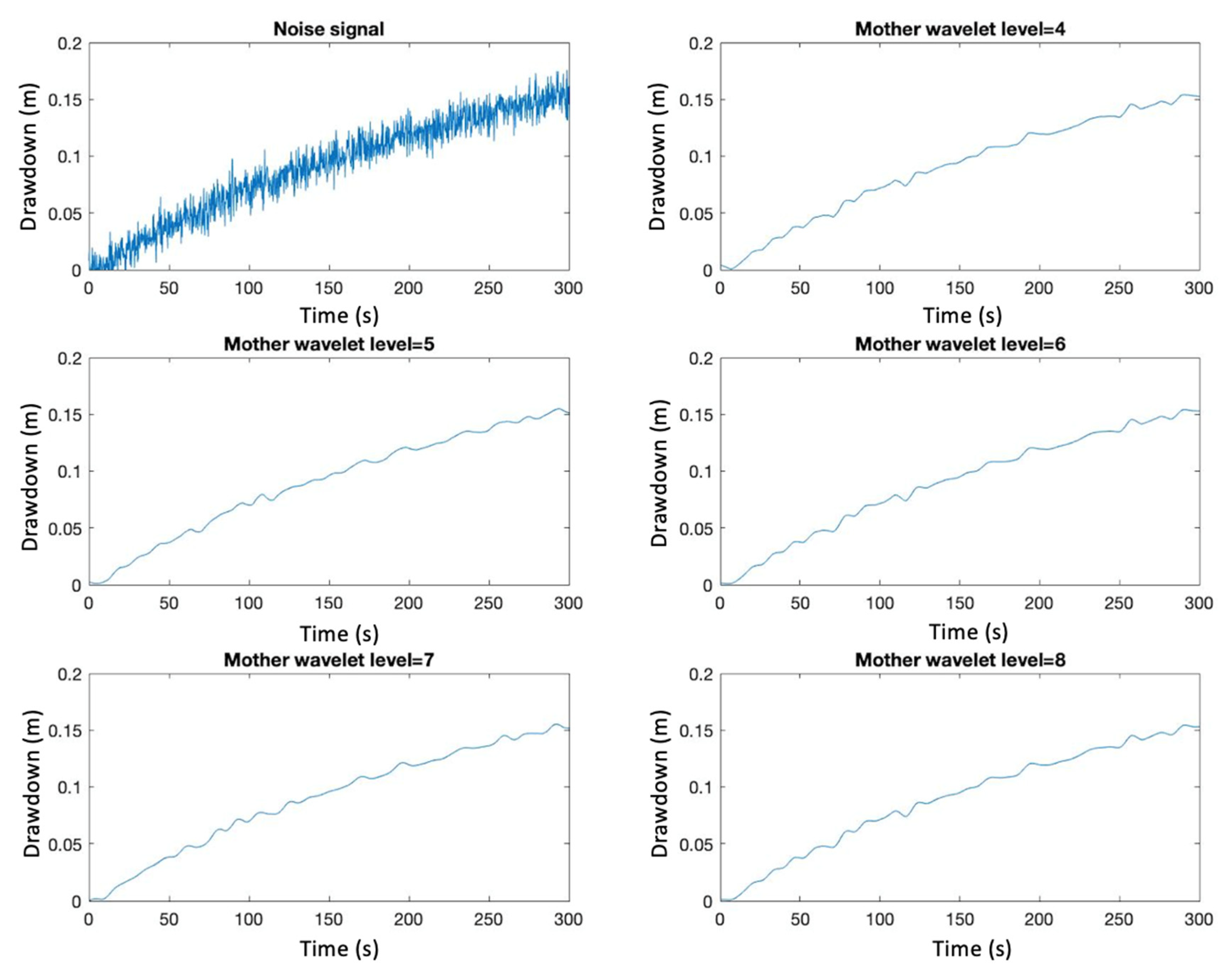
2.3. Wavelet De-Noising
2.4. Diagnostic Plot Analysis
3. Field Work
3.1. Test Site Description
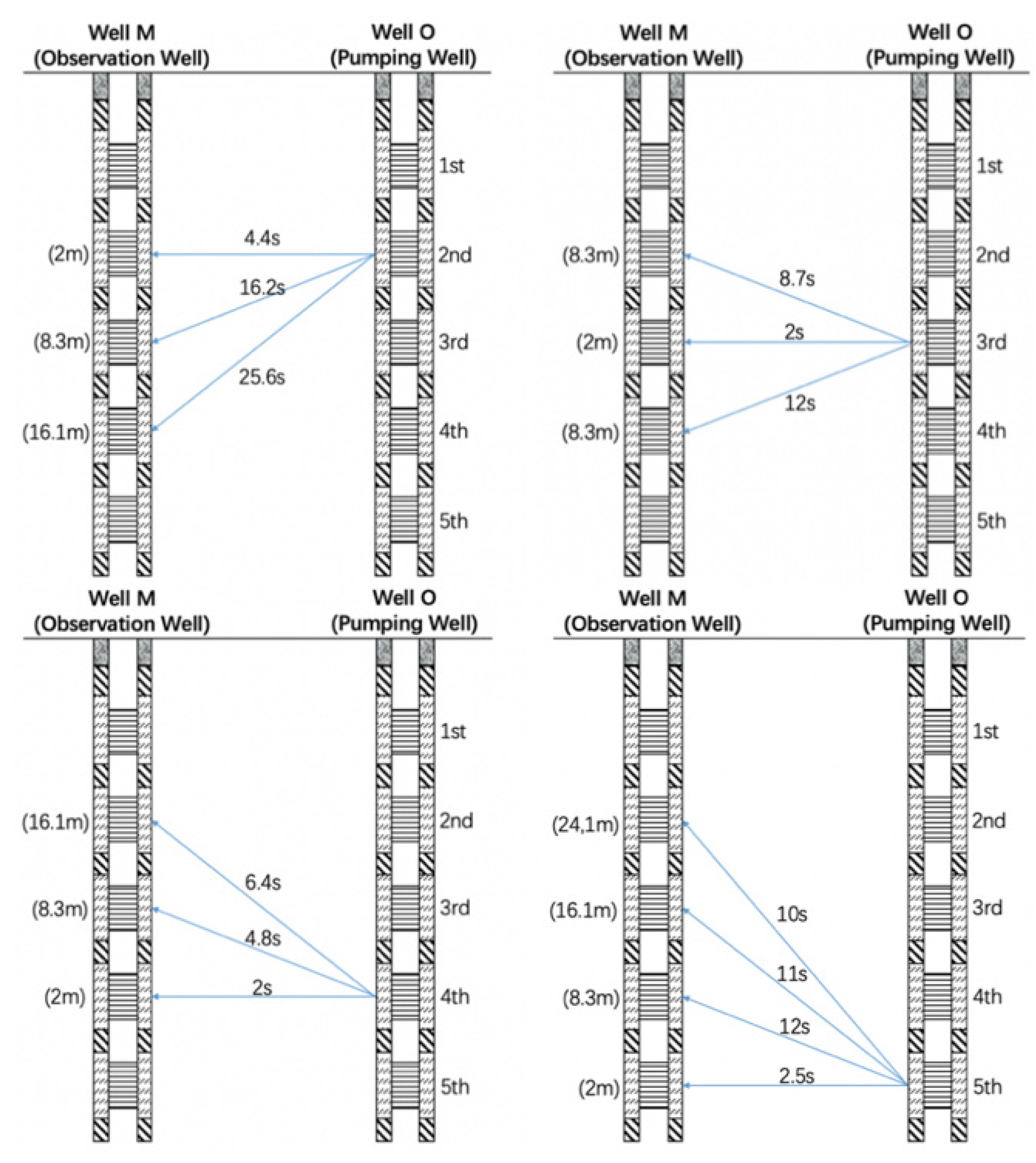
3.2. Multi-Level Pumping Tests Design
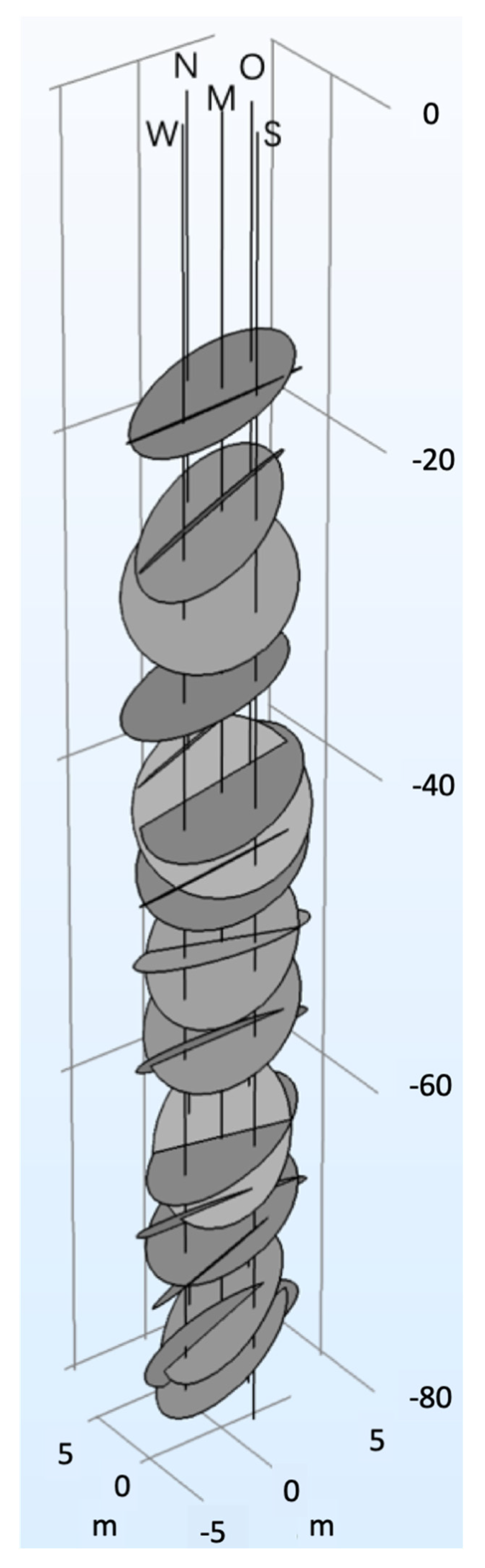
3.3. D Fracture Geometry Model
4. Numerical Study
4.1. Numerical Modelling
4.2. Comparison Between Wavelet and Other Filters
4.3. Wavelet De-Noising Method
5. Results
5.1. Travel Time Results from Experimental Data
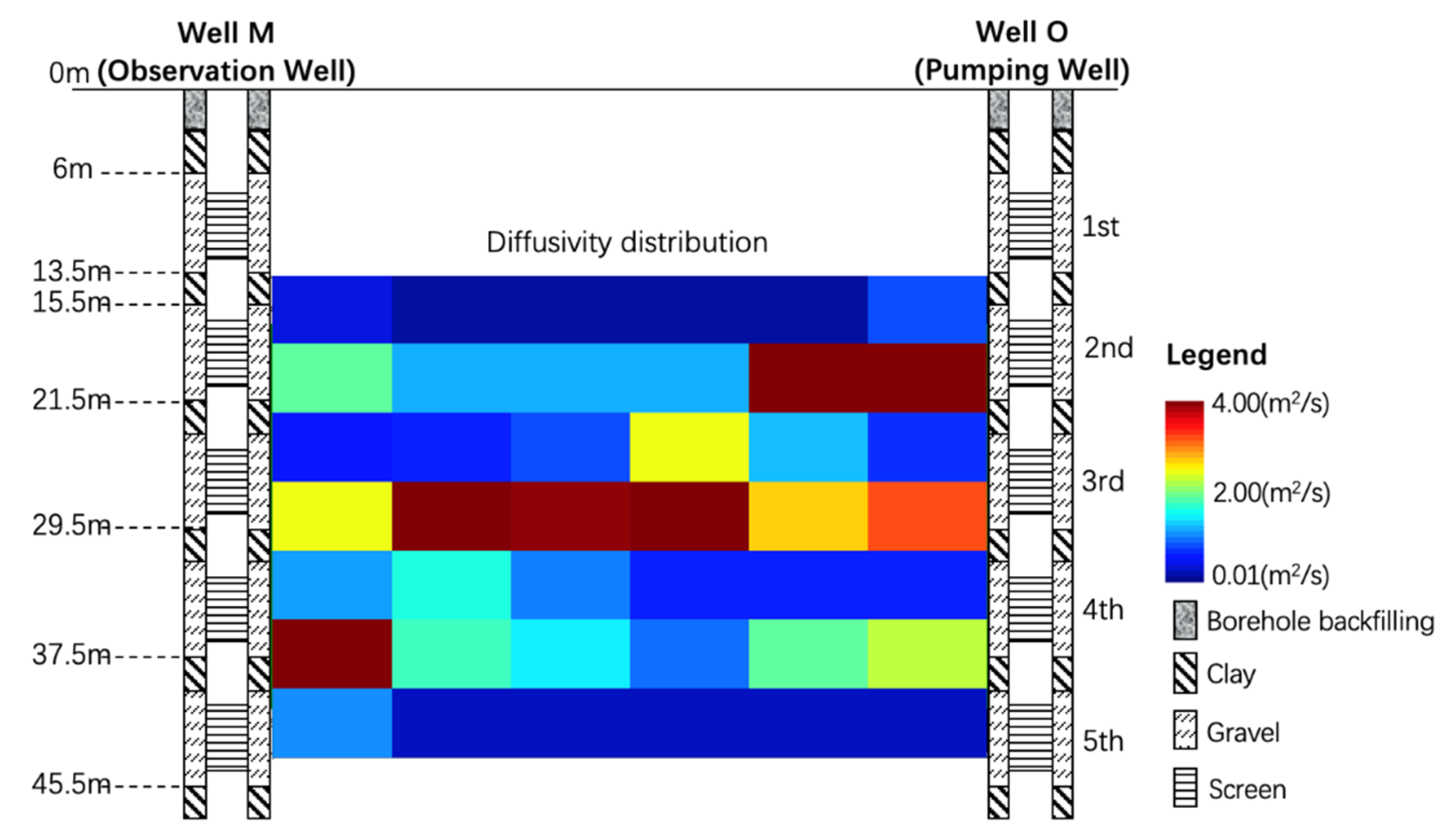
5.2. Hydraulic Travel Time Inversion Result and 3D Fracture Geometry Model
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A


Appendix B

References
- Illman, W.A.; Craig, A.J.; Liu, X. Practical issues in imaging hydraulic conductivity through hydraulic tomography. Ground Water 2008, 46, 120–132. [Google Scholar] [CrossRef] [PubMed]
- Illman, W.A.; Liu, X.; Takeuchi, S.; Yeh, T.C.J.; Ando, K.; Saegusa, H. Hydraulic tomography in fractured granite: Mizunami Underground Research site, Japan. Water Resour. Res. 2009, 45, W01406. [Google Scholar] [CrossRef] [Green Version]
- Illman, W.A. Hydraulic tomography offers improved imaging of heterogeneity in fractured rocks. Groundwater 2014, 52, 659–684. [Google Scholar] [CrossRef]
- Illman, W.A. Lessons learned from hydraulic and pneumatic tomography in fractured rocks. Procedia Environ. Sci. 2015, 25, 127–134. [Google Scholar] [CrossRef] [Green Version]
- Yeh, T.C.J.; Liu, S.Y. Hydraulic tomography: Development of a new aquifer test method. Water Resour. Res. 2000, 36, 2095–2105. [Google Scholar] [CrossRef]
- Yeh, T.C.; Mao, D.; Zha, Y.; Hsu, K.C.; Lee, C.H.; Wen, J.C.; Lu, W.; Yang, J. Why hydraulic tomography works? Ground Water 2014, 52, 168–172. [Google Scholar] [CrossRef]
- Sun, R.L.; Yeh, T.C.J.; Mao, D.Q.; Jin, M.G.; Lu, W.X.; Hao, Y.H. A temporal sampling strategy for hydraulic tomography analysis. Water Resour. Res. 2013, 49, 3881–3896. [Google Scholar] [CrossRef]
- Sanchez-Leon, E.; Leven, C.; Haslauer, C.P.; Cirpka, O.A. Combining 3D Hydraulic Tomography with Tracer Tests for Improved Transport Characterization. Ground Water 2016, 54, 498–507. [Google Scholar] [CrossRef]
- Zha, Y.; Yeh, T.C.J.; Illman, W.A.; Zeng, W.; Zhang, Y.; Sun, F.; Shi, L. A reduced-order successive linear estimator for geostatistical inversion and its application in hydraulic tomography. Water Resour. Res. 2018, 54, 1616–1632. [Google Scholar] [CrossRef]
- Zha, Y.; Yeh, T.-C.J.; Illman, W.A.; Tanaka, T.; Bruines, P.; Onoe, H.; Saegusa, H. What does hydraulic tomography tell us about fractured geological media? A field study and synthetic experiments. J. Hydrol. 2015, 531, 17–30. [Google Scholar] [CrossRef]
- Zhu, J.F.; Yeh, T.C.J. Characterization of aquifer heterogeneity using transient hydraulic tomography. Water Resour. Res. 2005, 41, W07028. [Google Scholar] [CrossRef]
- Liu, X.; Illman, W.A.; Craig, A.J.; Zhu, J.; Yeh, T.C. Laboratory sandbox validation of transient hydraulic tomography. Water Resour. Res. 2007, 43, W05404. [Google Scholar] [CrossRef]
- Brauchler, R.; Sauter, M.; McDermott, C.I.; Leven, C.; Weede, M.; Dietrich, P.; Liedl, R.; Hötzl, H.; Teutsch, G. Characterization of fractured porous media: Aquifer analogue approach. Groundw. Fract. Rocks Iah Sel. Pap. Ser. 2007, 9, 375. [Google Scholar]
- Brauchler, R.; Hu, R.; Dietrich, P.; Sauter, M. A field assessment of high-resolution aquifer characterization based on hydraulic travel time and hydraulic attenuation tomography. Water Resour. Res. 2011, 47, W03503. [Google Scholar] [CrossRef]
- Hao, Y.; Yeh, T.-C.J.; Xiang, J.; Illman, W.A.; Ando, K.; Hsu, K.-C.; Lee, C.-H. Hydraulic tomography for detecting fracture zone connectivity. Groundwater 2008, 46, 183–192. [Google Scholar] [CrossRef]
- Hu, R.; Brauchler, R.; Herold, M.; Bayer, P. Hydraulic tomography analog outcrop study: Combining travel time and steady shape inversion. J. Hydrol. 2011, 409, 350–362. [Google Scholar] [CrossRef]
- Nolet, G. A breviary of seismic tomography. A Breviary of Seismic Tomography, by Guust Nolet; Cambridge University Press: Cambridge, UK, 2008; Volume 2008. [Google Scholar]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; Siam: Philadelphia, PA, USA, 2005; Volume 89. [Google Scholar]
- Wang, Y.L.; Yeh, T.C.J.; Wen, J.C.; Huang, S.Y.; Zha, Y.; Tsai, J.P.; Hao, Y.; Liang, Y. Characterizing subsurface hydraulic heterogeneity of alluvial fan using riverstage fluctuations. J. Hydrol. 2017, 547, 650–663. [Google Scholar] [CrossRef]
- Zha, Y.; Yeh, T.J.; Illman, W.A.; Tanaka, T.; Bruines, P.; Onoe, H.; Saegusa, H.; Mao, D.; Takeuchi, S.; Wen, J.C. An Application of Hydraulic Tomography to a Large-Scale Fractured Granite Site, Mizunami, Japan. Ground Water 2016, 54, 793–804. [Google Scholar] [CrossRef]
- Brauchler, R.; Hu, R.; Vogt, T.; Al-Halbouni, D.; Heinrichs, T.; Ptak, T.; Sauter, M. Cross-well slug interference tests: An effective characterization method for resolving aquifer heterogeneity. J. Hydrol. 2010, 384, 33–45. [Google Scholar] [CrossRef]
- Brauchler, R.; Liedl, R.; Dietrich, P. A travel time based hydraulic tomographic approach. Water Resour. Res. 2003, 39, 1370. [Google Scholar] [CrossRef]
- Brauchler, R.; Cheng, J.T.; Dietrich, P.; Everett, M.; Johnson, B.; Liedl, R.; Sauter, M. An inversion strategy for hydraulic tomography: Coupling travel time and amplitude inversion. J. Hydrol. 2007, 345, 184–198. [Google Scholar] [CrossRef]
- Cheng, J.T.; Brauchler, R.; Everett, M.E. Comparison of Early and Late Travel Times of Pressure Pulses Induced by Multilevel Slug Tests. Eng. Appl. Comput. Fluid Mech. 2009, 3, 514–529. [Google Scholar] [CrossRef]
- Vasco, D.W.; Keers, H.; Karasaki, K. Estimation of reservoir properties using transient pressure data: An asymptotic approach. Water Resour. Res. 2000, 36, 3447–3465. [Google Scholar] [CrossRef]
- Ott, H.W.; Ott, H.W. Noise Reduction Techniques in Electronic Systems; Wiley: New York, NY, USA, 1988; Volume 442. [Google Scholar]
- Tuzlukov, V. Signal Processing Noise; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Rouphael, T.J. RF and Digital Signal Processing for Software-Defined Radio: A Multi-standard Multi-mode Approach; Newnes: Oxford, UK, 2009. [Google Scholar]
- McClaning, K.; Vito, T. Radio Receiver Design; Noble Publishing Corporation: Atlanta, GA, USA, 2000. [Google Scholar]
- Illman, W.A.; Liu, X.; Craig, A. Steady-state hydraulic tomography in a laboratory aquifer with deterministic heterogeneity: Multi-method and multiscale validation of hydraulic conductivity tomograms. J. Hydrol. 2007, 341, 222–234. [Google Scholar] [CrossRef]
- Tokhmechi, B.; Memarian, H.; Rasouli, V.; Noubari, H.A.; Moshiri, B. Fracture detection from water saturation log data using a Fourier–wavelet approach. J. Pet. Sci. Eng. 2009, 69, 129–138. [Google Scholar] [CrossRef] [Green Version]
- Taherdangkoo, R.; Abdideh, M. Application of wavelet transform to detect fractured zones using conventional well logs data (Case study: Southwest of Iran). Int. J. Pet. Eng. 2016, 2, 125–139. [Google Scholar] [CrossRef]
- Xie, H.; Pierce, L.E.; Ulaby, F.T. SAR speckle reduction using wavelet denoising and Markov random field modeling. Ieee Trans. Geosci. Remote Sens. 2002, 40, 2196–2212. [Google Scholar] [CrossRef] [Green Version]
- Quiroga, R.Q.; Garcia, H. Single-trial event-related potentials with wavelet denoising. Clin. Neurophysiol. 2003, 114, 376–390. [Google Scholar] [CrossRef]
- Xiang, J.; Yeh, T.C.J.; Lee, C.H.; Hsu, K.C.; Wen, J.C. A simultaneous successive linear estimator and a guide for hydraulic tomography analysis. Water Resour. Res. 2009, 45, W02432. [Google Scholar] [CrossRef] [Green Version]
- Brauchler, R.; Hu, R.; Hu, L.; Jiménez, S.; Bayer, P.; Dietrich, P.; Ptak, T. Rapid field application of hydraulic tomography for resolving aquifer heterogeneity in unconsolidated sediments. Water Resour. Res. 2013, 49, 2013–2024. [Google Scholar] [CrossRef]
- Guo, X.-L.; Yang, K.-L.; Guo, Y.-X. Hydraulic pressure signal denoising using threshold self-learning wavelet algorithm. J. Hydrodyn. Ser. B 2008, 20, 433–439. [Google Scholar] [CrossRef]
- Bourdet, D.; Whittle, T.M.; Douglas, A.A.; Pirard, Y.M. A New Set of Type Curves Simplifies Well Test Analysis. World Oil 1983, 196, 95. [Google Scholar]
- Renard, P.; Glenz, D.; Mejias, M. Understanding diagnostic plots for well-test interpretation. Hydrogeol. J. 2009, 17, 589–600. [Google Scholar] [CrossRef] [Green Version]
- Lo, T.-W.; Inderwiesen, P.L. Fundamentals of Seismic Tomography; Society of Exploration Geophysicists: Houston, TX, USA, 1994; Volume 6. [Google Scholar]
- Qiu, P.X.; Hu, R.; Hu, L.W.; Liu, Q.; Xing, Y.X.; Yang, H.C.; Qi, J.J.; Ptak, T. A Numerical Study on Travel Time Based Hydraulic Tomography Using the SIRT Algorithm with Cimmino Iteration. Water 2019, 11, 909. [Google Scholar] [CrossRef] [Green Version]
- Addison, P.S. The Illustrated Wavelet Transform Handbook: Introductory Theory and Applications in Science, Engineering, Medicine and Finance; CRC Press: Boca Raton, FL, USA, 2002; Volume 6. [Google Scholar]
- Chui, C.K. An Introduction to Wavelets; Elsevier: Amsterdam, The Netherlands, 2016; Volume 6. [Google Scholar]
- Shensa, M.J. The Discrete Wavelet Transform-Wedding the a Trous and Mallat Algorithms. IEEE Trans. Signal Process. 1992, 40, 2464–2482. [Google Scholar] [CrossRef] [Green Version]
- Mallat, S.G. A Theory for Multiresolution Signal Decomposition—The Wavelet Representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef] [Green Version]
- Illman, W.A.; Neuman, S.P. Type-curve interpretation of multirate single-hole pneumatic injection tests in unsaturated fractured rock. Groundwater 2000, 38, 899–911. [Google Scholar] [CrossRef]
- Illman, W.A.; Neuman, S.P. Type curve interpretation of a cross-hole pneumatic injection test in unsaturated fractured tuff. Water Resour. Res. 2001, 37, 583–603. [Google Scholar] [CrossRef]
- Tanner, D.C.; Leiss, B.; Vollbrecht, A. The role of strike-slip tectonics in the Leinetal Graben, Lower Saxony [Die Bedeutung von Seitenverschiebungstektonik im Leinetalgraben, Niedersachsen]. Z. Der Dtsch. Ges. für Geowiss. 2010, 161, 369–377. [Google Scholar]
- Oberdorfer, P.; Holzbecher, E.; Hu, R.; Ptak, T.; Sauter, M. A Five Spot Well Cluster for Hydraulic and Thermal Tomography, Proceedings of the Thirty-Eighth Workshop on Geothermal Reservoir Engineering, Stanford, CA, USA, 11–13 February 2013; Stanford Geothermal Program: Stanford, CA, USA, 2013; pp. 239–243. [Google Scholar]
- Baetzel, K. Hydrogeological Characterization of a Fratured Aquifer based on Modelling and Heat Tracer Experiments. Master‘s Thesis, University of Goettingen, Goettingen, Lower Saxony, Germany, 2017. [Google Scholar]
- Werner, H. Strukturgeologische Charakterisierung Eines Geothermietestfeldes auf der Basis Bohrlochgeophysikalischer Messdaten und Bohrkerngefugen auf dem Goettinger Nordcampus. Ph.D. Thesis, University of Goettingen, Goettingen, Lower Saxony, Germany, 2013. [Google Scholar]
- Shrestha, J.G. Design of Thermal Tomography Tests on the Basis of a Heterogeneous Flow Model. Master’s Thesis, University of Goettingen, Goettingen, Lower Saxony, Germany, 2013. [Google Scholar]
- Tan, E.Y.Z. Hydraulic tomography of a fractured aquifer based on a ray tracing method. Master‘s Thesis, University of Goettingen, Goettingen, Lower Saxony, Germany, 2015. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Well skin | Porosity | 0.4 |
| Hydraulic conductivity (m/s) | ||
| Specific storage (1/m) | ||
| Matrix | Porosity | 0.2 |
| Hydraulic conductivity (m/s) | ||
| Specific storage (1/m) | ||
| Fracture | Porosity | 0.4 |
| Hydraulic conductivity (m/s) | ||
| Specific storage (1/m) | ||
| Fracture thickness (m) | 0.01 | |
| Filter | tpeak (s) |
|---|---|
| Wavelet | 15.2 |
| Moving | 15.8 |
| Lowess | 15.8 |
| Loess | 13.2 |
| Sgolay | 15.8 |
| Rlowess | 15.8 |
| Rloess | 28.6 |
| SNR = 40 | ||||
| De-Noising Level | Mother Wavelet | |||
| Symlets | Coiflets | Biorthogonal | Dmey | |
| Level 5 | 12.4 s | 19 s | 23.4 s | 15 s |
| Level 6 | 22.4 s | 15.2 s | 22.8 s | 17.2 s |
| Level 7 | 22.4 s | 23.6 s | 22.4 s | 27.6 s |
| SNR = 30 | ||||
| De-Noising Level | Mother Wavelet | |||
| Symlets | Coiflets | Biorthogonal | Dmey | |
| Level 5 | 12.8 s | 13.4 s | 13 s | 13.8 s |
| Level 6 | 23.8 s | 15.4 s | 23.8 s | 18 s |
| Level 7 | 22.8 s | 24 s | 23.2 s | 27.6 s |
| SNR = 20 | ||||
| De-Noising Level | Mother Wavelet | |||
| Symlets | Coiflets | Biorthogonal | Dmey | |
| Level 5 | / | / | / | / |
| Level 6 | 25 s | 13.2 s | 23.4 s | 17.6 s |
| Level 7 | 21.6 s | 22.2 s | 22 s | 26.8 s |
| SNR = 10 | ||||
| De-Noising Level | Mother Wavelet | |||
| Symlets | Coiflets | Biorthogonal | Dmey | |
| Level 5 | / | / | / | / |
| Level 6 | / | / | / | / |
| Level 7 | 21.2 s | 20.6 s | 21.8 s | 24.4 s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Hu, R.; Qiu, P.; Liu, Q.; Xing, Y.; Tao, R.; Ptak, T. Application of Wavelet De-Noising for Travel-Time Based Hydraulic Tomography. Water 2020, 12, 1533. https://doi.org/10.3390/w12061533
Yang H, Hu R, Qiu P, Liu Q, Xing Y, Tao R, Ptak T. Application of Wavelet De-Noising for Travel-Time Based Hydraulic Tomography. Water. 2020; 12(6):1533. https://doi.org/10.3390/w12061533
Chicago/Turabian StyleYang, Huichen, Rui Hu, Pengxiang Qiu, Quan Liu, Yixuan Xing, Ran Tao, and Thomas Ptak. 2020. "Application of Wavelet De-Noising for Travel-Time Based Hydraulic Tomography" Water 12, no. 6: 1533. https://doi.org/10.3390/w12061533
APA StyleYang, H., Hu, R., Qiu, P., Liu, Q., Xing, Y., Tao, R., & Ptak, T. (2020). Application of Wavelet De-Noising for Travel-Time Based Hydraulic Tomography. Water, 12(6), 1533. https://doi.org/10.3390/w12061533