
Raspy-Cal: A Genetic Algorithm-Based Automatic Calibration Tool for HEC-RAS Hydraulic Models


Abstract
:1. Introduction
2. Materials and Methods
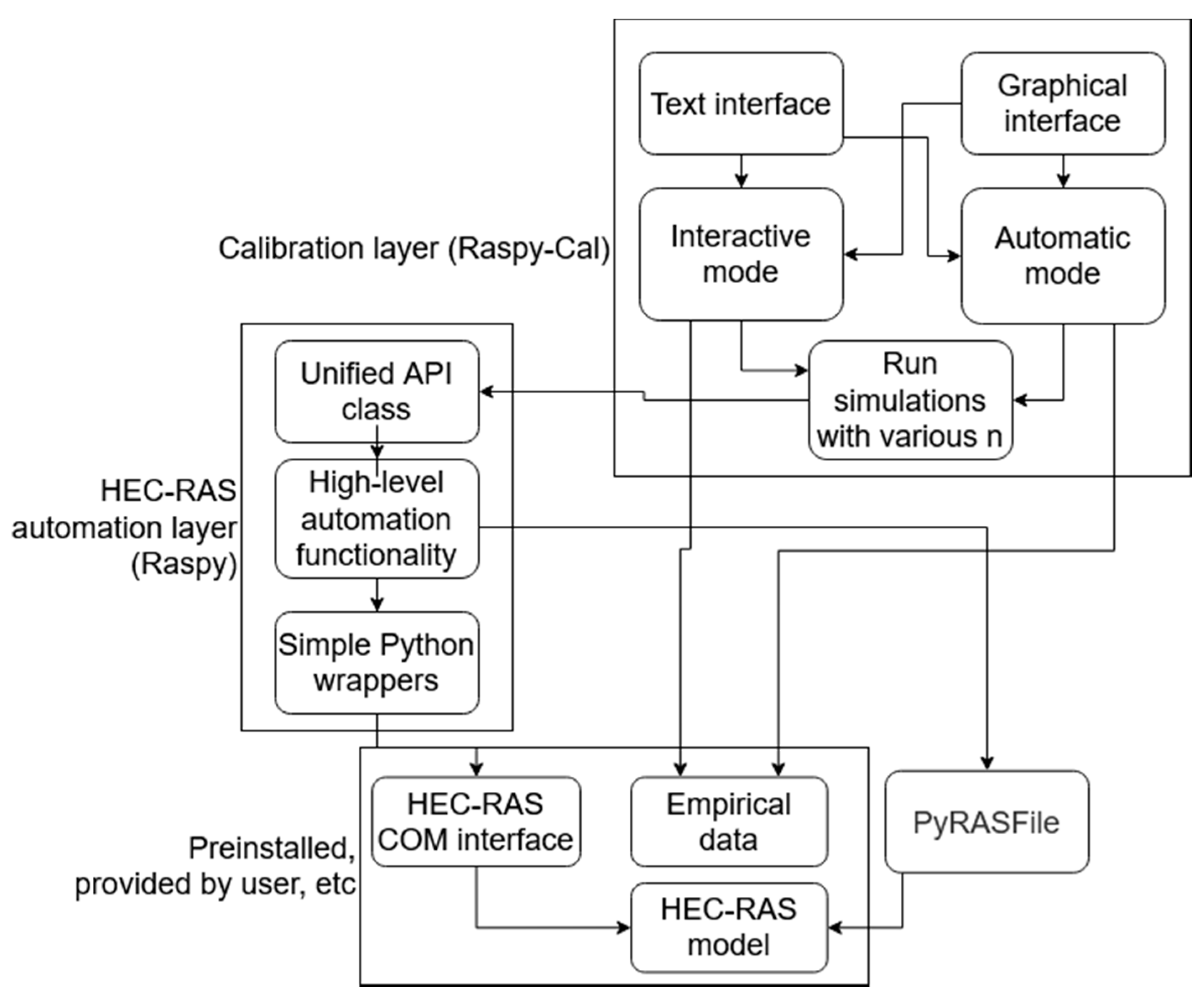
2.1. General Automation (Raspy)
2.2. Calibration (Raspy-Cal)
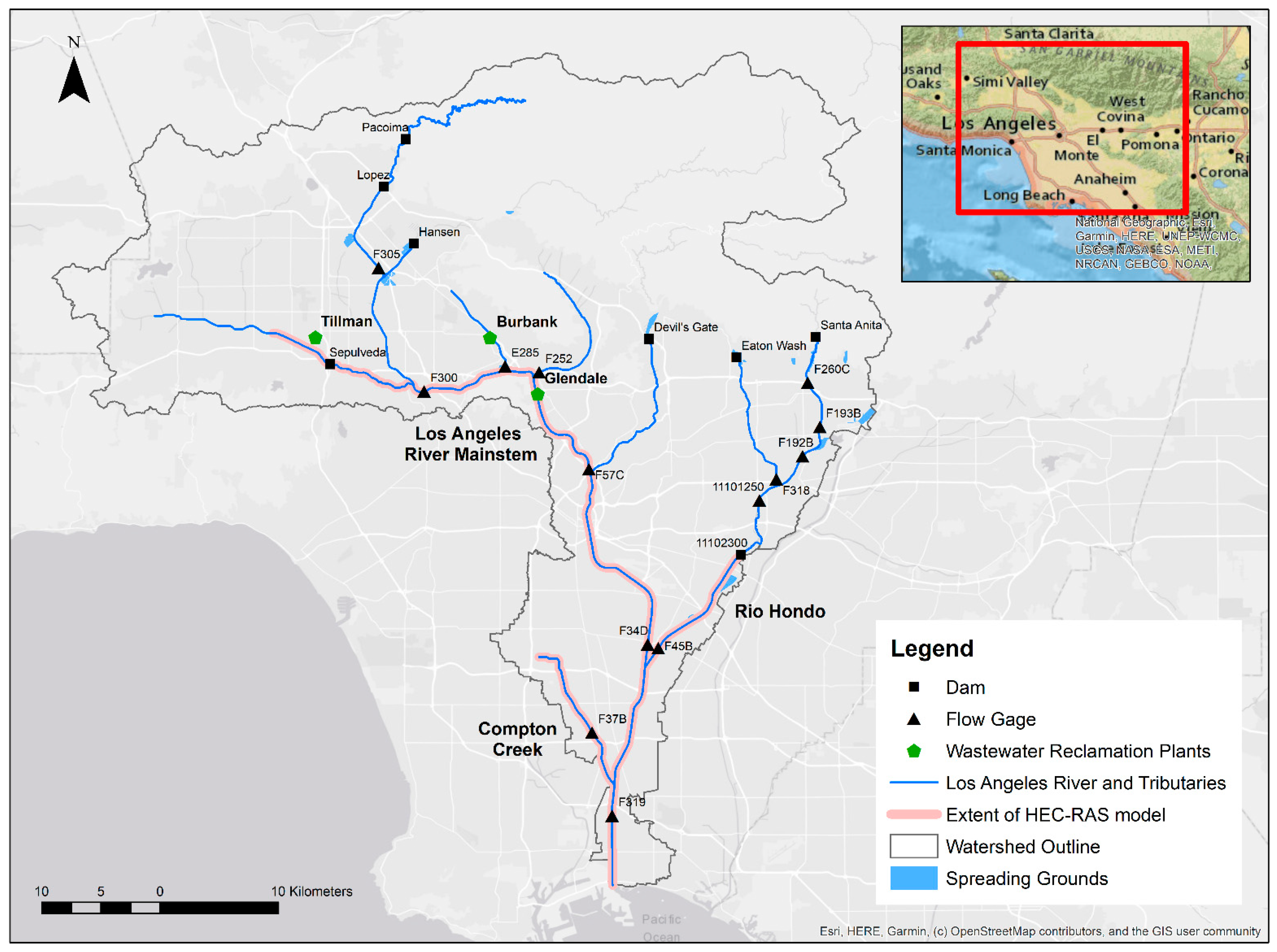
2.3. Case Study
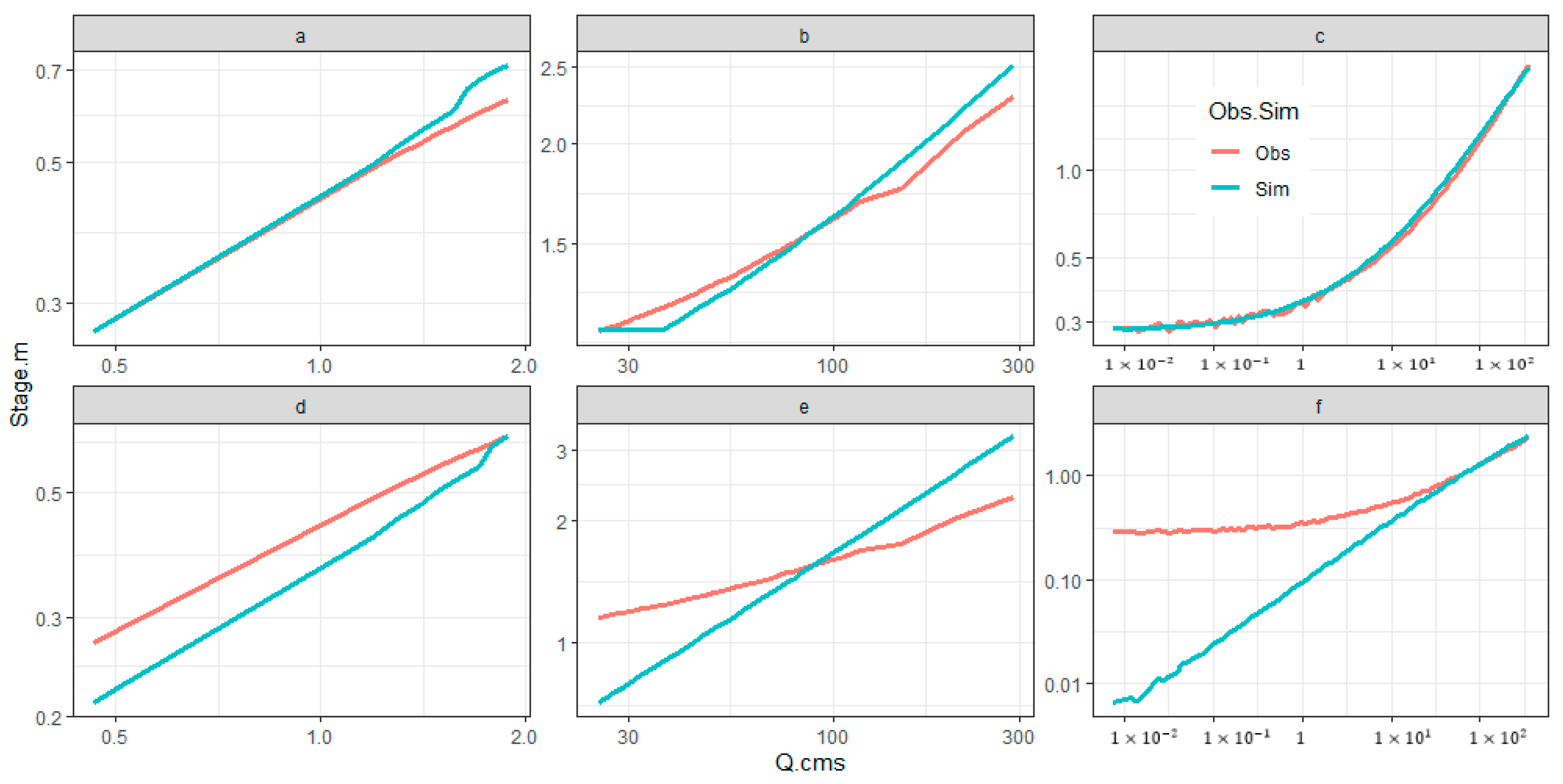
- F37B, a rectangular cross-section in Compton Creek
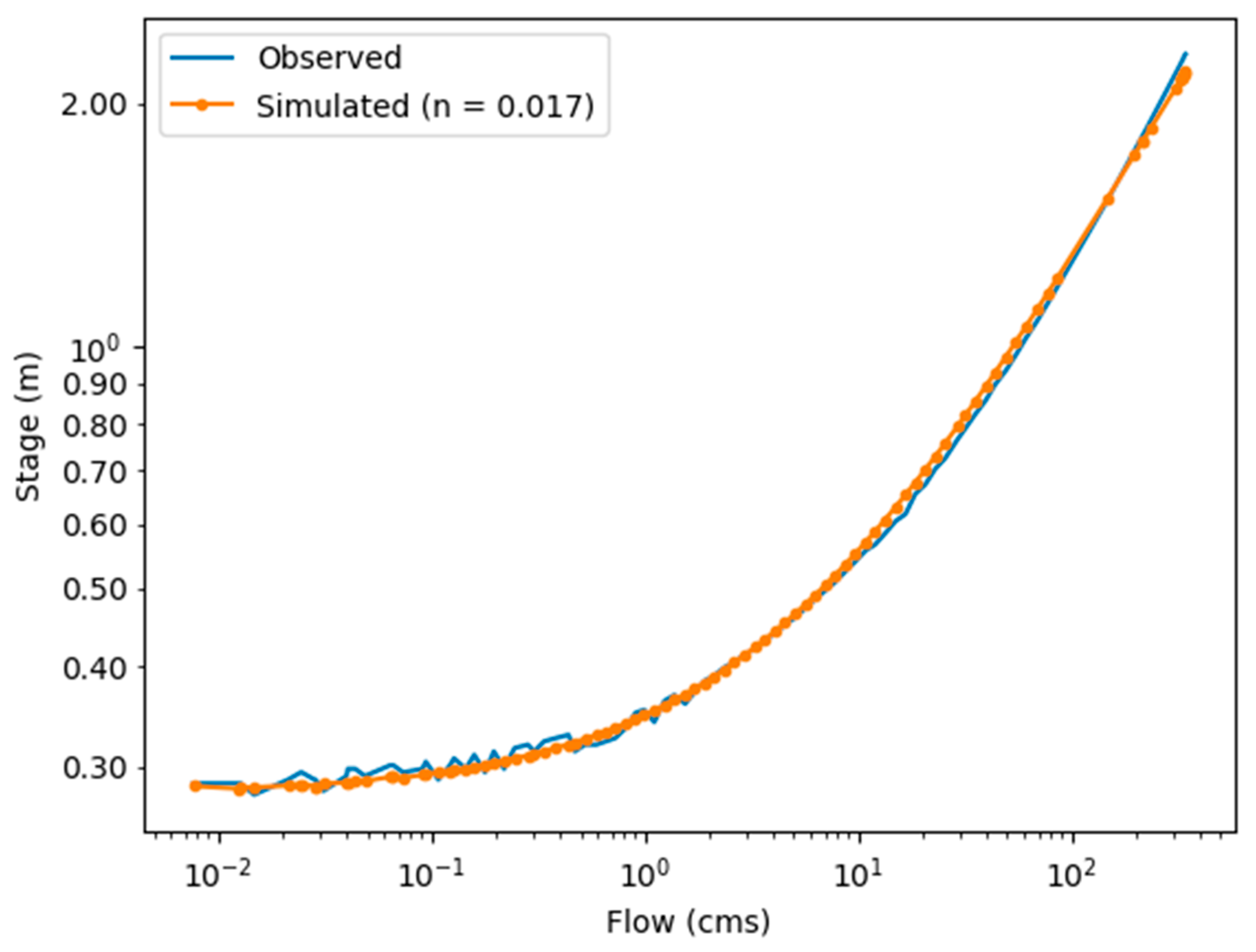
- USGS 11102300, a trapezoidal cross-section in Rio Hondo
- F45B, a trapezoidal cross-section in Rio Hondo
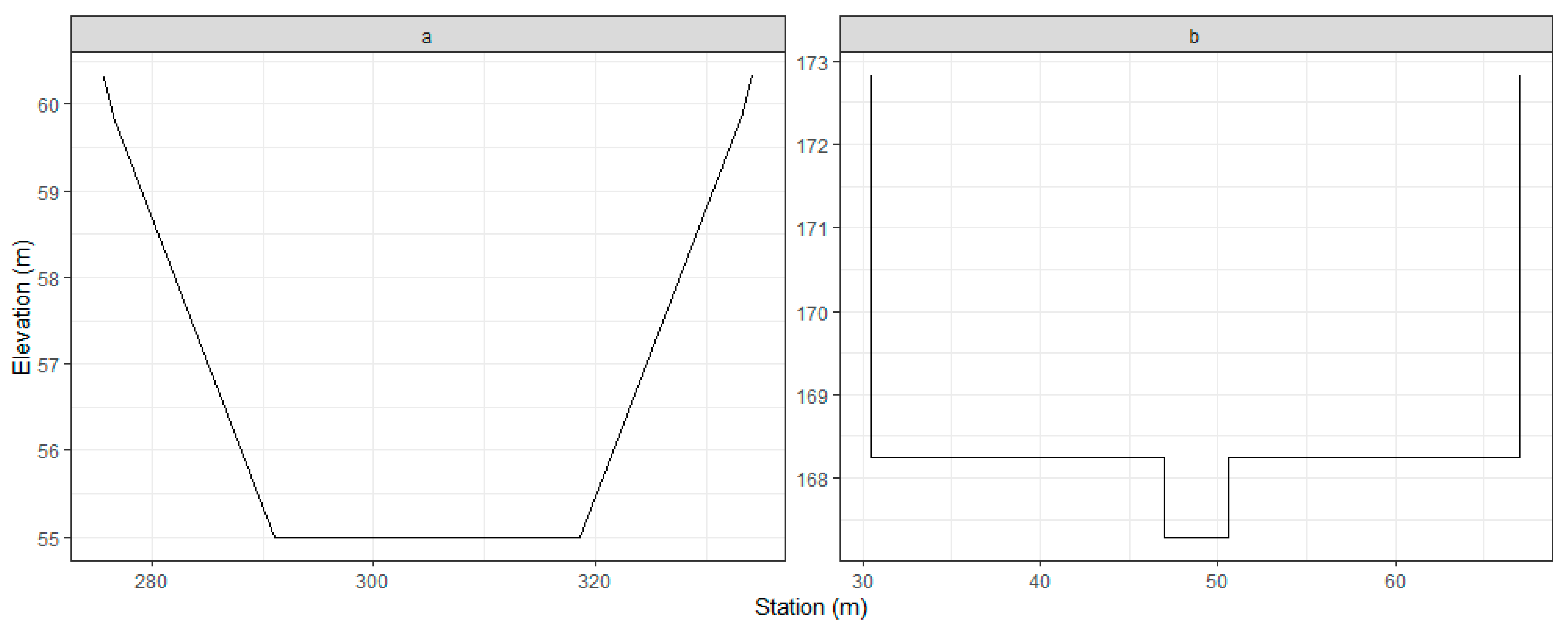
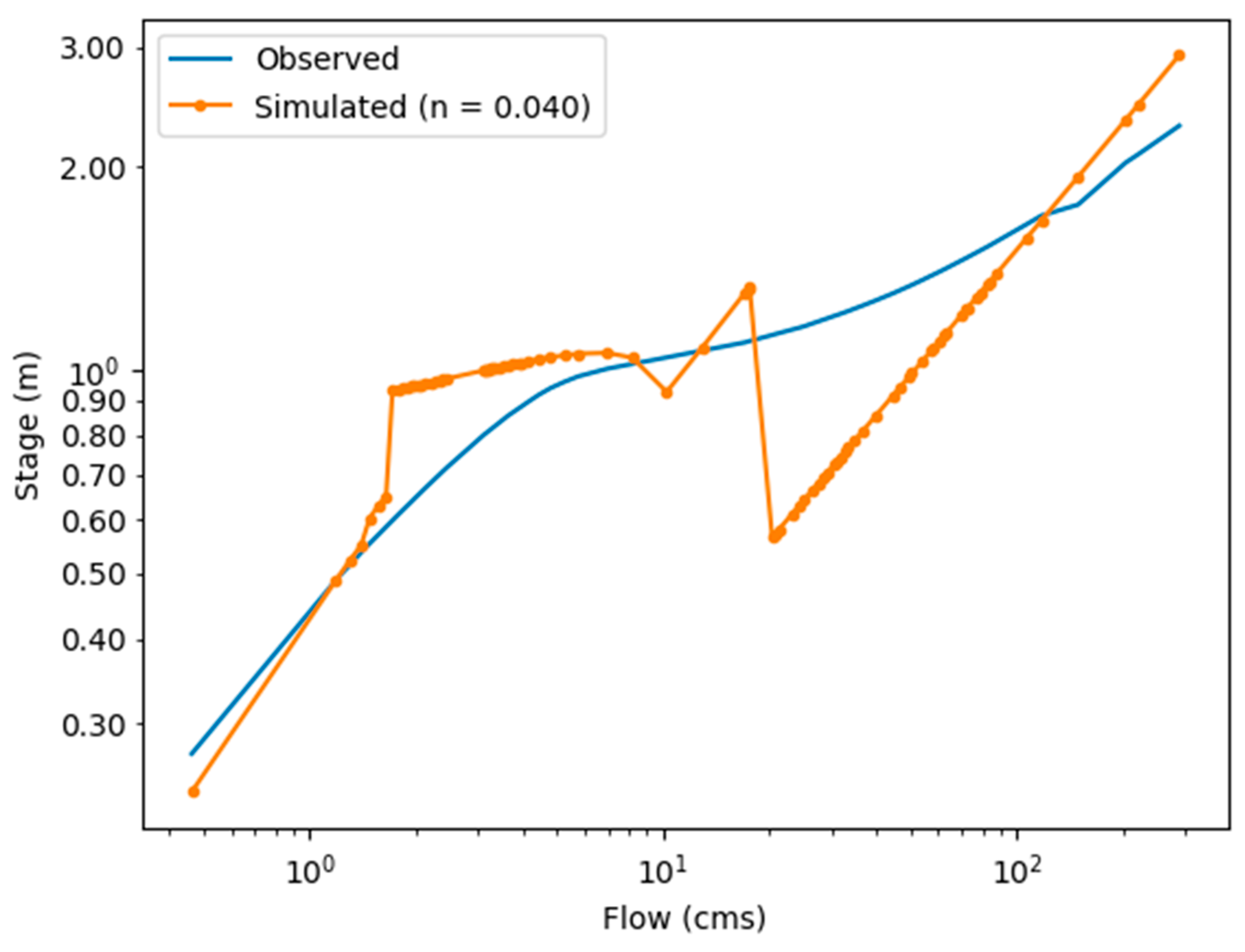
- F300, a rectangular cross-section with a low-flow channel in the LA River mainstem
- F319, a trapezoidal cross-section with a low-flow channel in the LA River mainstem
3. Results and Discussion
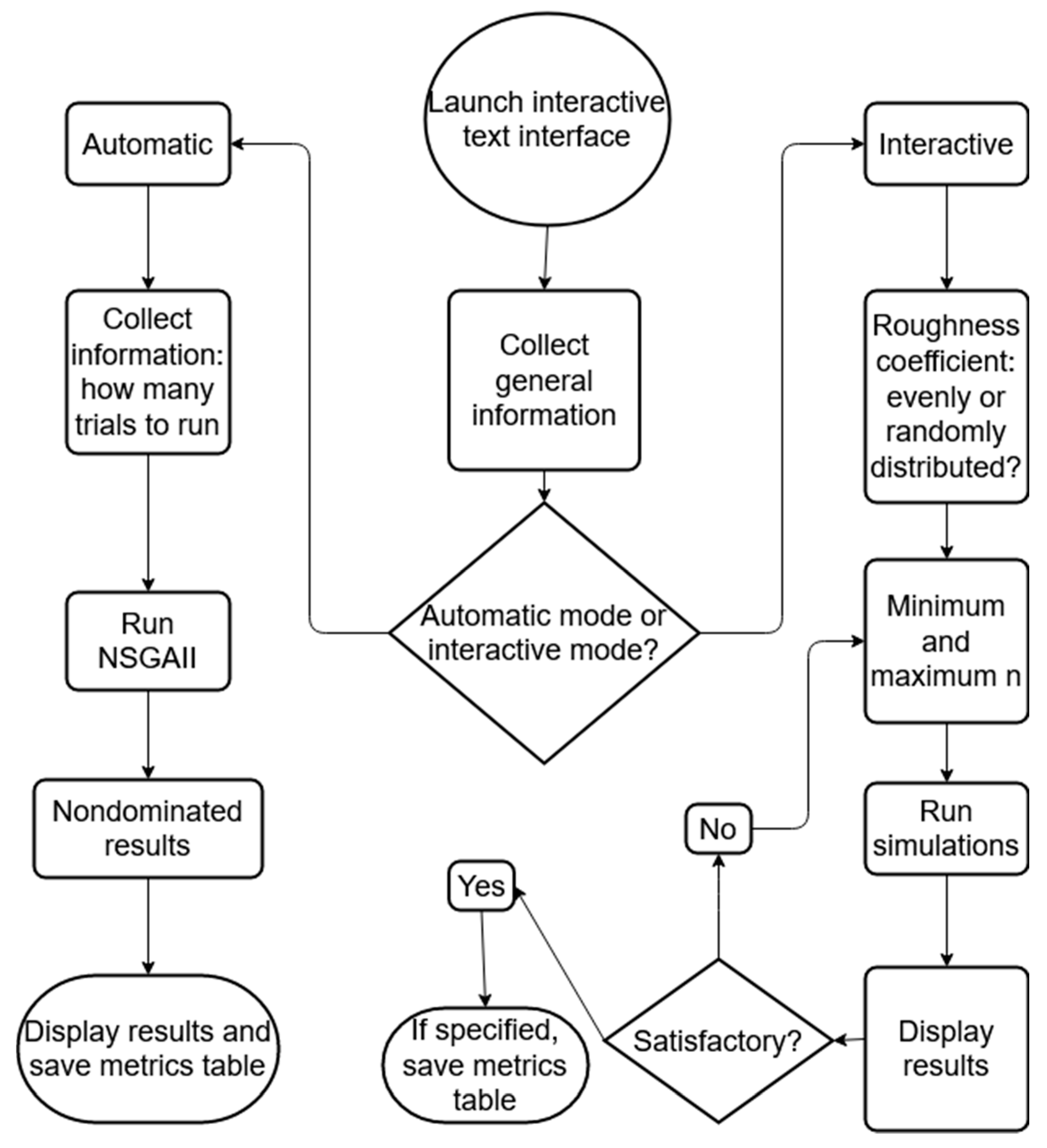
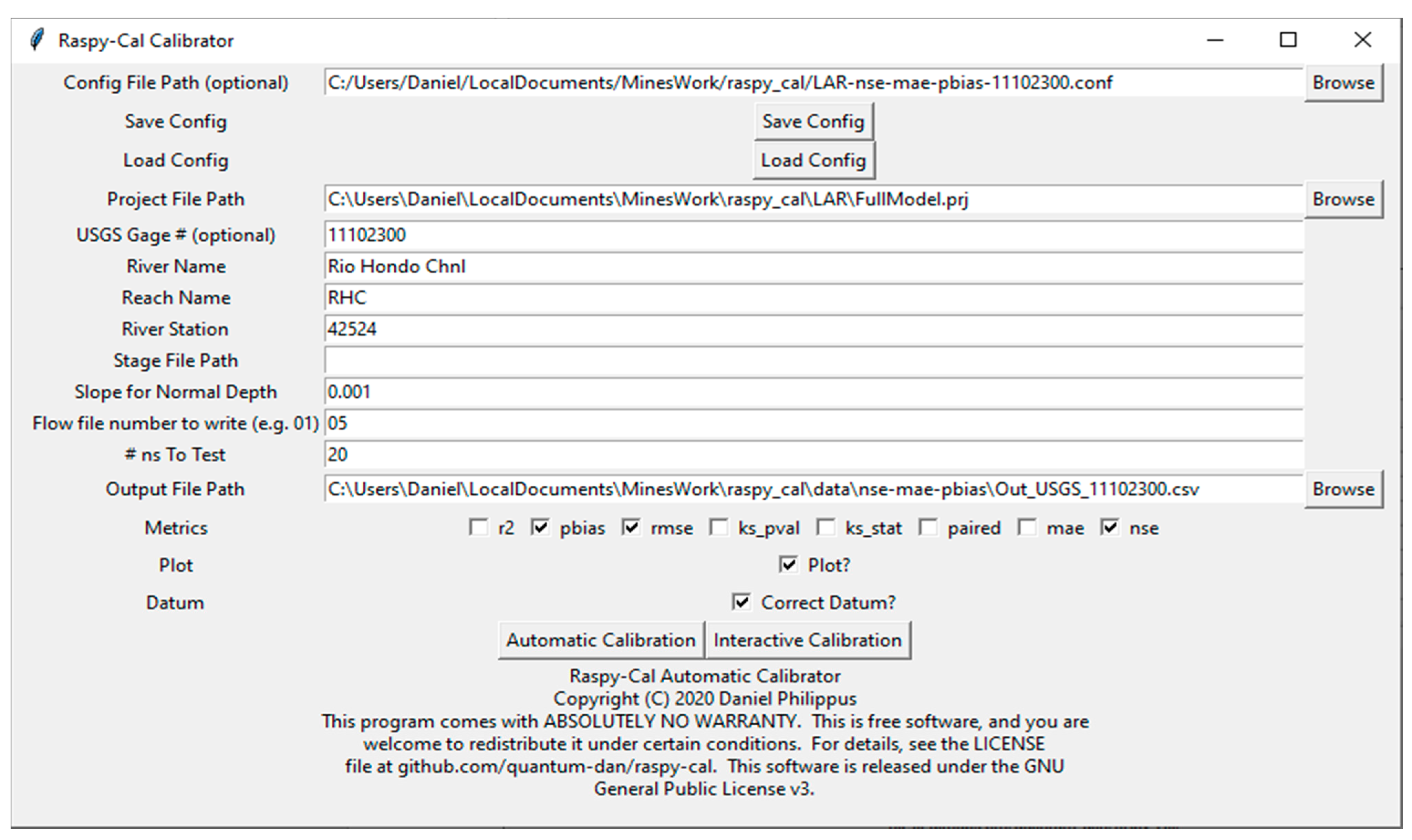
3.1. User Interface
3.2. Case Study
3.3. Discussion
3.4. Future Work
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abdi, R.; Endreny, T.; Nowak, D. A model to integrate urban river thermal cooling in river restoration. J. Environ. Manag. 2020, 258, 110023. [Google Scholar] [CrossRef]
- Papadaki, C.; Bellos, V.; Stoumboudi, M.; Kopsiaftis, G.; Dimitriou, E. Evaluation of streamflow habitat relationships using habitat suitability curves and HEC-RAS. Eur. Water 2017, 58, 127–134. [Google Scholar]
- Shafroth, P.B.; Wilcox, A.C.; Lytle, D.A.; Hickey, J.T.; Andersen, D.C.; Beauchamp, V.B.; Hautzinger, A.; McMullen, L.E.; Warner, A. Ecosystem effects of environmental flows: Modelling and experimental floods in a dryland river. Freshw. Biol. 2010, 55, 68–85. [Google Scholar] [CrossRef]
- US Army Corps of Engineers. HEC-RAS. 2019. Available online: https://www.hec.usace.army.mil/software/hec-ras/ (accessed on 4 March 2020).
- US Army Corps of Engineers. HEC-RAS Features. 2019. Available online: https://www.hec.usace.army.mil/software/hec-ras/features.aspx (accessed on 4 March 2020).
- Abbas, S.A.; Al-Aboodi, A.H.; Ibrahim, H.T. Identification of Manning’s Coefficient Using HEC-RAS Model: Upstream Al-Amarah Barrage. J. Eng. 2020, 2020, 6450825. [Google Scholar] [CrossRef] [Green Version]
- Ardıçlıoğlu, M.; Kuriqi, A. Calibration of channel roughness in intermittent rivers using HEC-RAS model: Case of Sarimsakli creek, Turkey. SN Appl. Sci. 2019, 1, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Parhi, P.K.; Sankhua, R.N.; Roy, G.P. Calibration of Channel Roughness for Mahanadi River, (India) Using HEC-RAS Model. J. Water Resour. Prot. 2012, 4, 847–850. [Google Scholar] [CrossRef] [Green Version]
- Alamdari, N.; Sample, D.J. A multiobjective simulation-optimization tool for assisting in urban watershed restoration planning. J. Clean. Prod. 2019, 213, 251–261. [Google Scholar] [CrossRef]
- Bekele, E.G.; Nicklow, J.W. Multi-objective automatic calibration of SWAT using NSGA-II. J. Hydrol. 2007, 341, 165–176. [Google Scholar] [CrossRef]
- Eckhardt, K.; Arnold, J.G. Automatic calibration of a distributed catchment model. J. Hydrol. 2001, 251, 103–109. [Google Scholar] [CrossRef]
- Lin, F.R.; Wu, N.J.; Tu, C.H.; Tsay, T.K. Automatic Calibration of an Unsteady River Flow Model by Using Dynamically Dimensioned Search Algorithm. Math. Probl. Eng. 2017, 2017, 7919324. [Google Scholar] [CrossRef]
- Seong, C.; Her, Y.; Benham, B.L. Automatic Calibration Tool for Hydrologic Simulation Program-FORTRAN Using a Shuffled Complex Evolution Algorithm. Water 2015, 7, 503–527. [Google Scholar] [CrossRef] [Green Version]
- Goodell, C. Breaking the HEC-RAS Code: A User’s Guide to Automating HEC-RAS; h2ls: Portland, OR, USA, 2014. [Google Scholar]
- Leon, A.S.; Goodell, C. Controlling HEC-RAS using MATLAB. Environ. Model. Softw. 2016, 84, 339–348. [Google Scholar] [CrossRef] [Green Version]
- Dysarz, T. Application of Python Scripting Techniques for Control and Automation of HEC-RAS Simulations. Water 2018, 10, 1382. [Google Scholar] [CrossRef] [Green Version]
- Timbadiya, P.V.; Patel, P.L.; Porey, P.D.; Timbadiya, P.V.; Patel, P.L.; Porey, P.D. Calibration of HEC-RAS Model on Prediction of Flood for Lower Tapi River, India. J. Water Resour. Prot. 2011, 3, 805–811. [Google Scholar] [CrossRef] [Green Version]
- Peña-Castellanos, G. PyRAS·PyPI. 2015. Available online: https://pypi.org/project/PyRAS/ (accessed on 23 January 2020).
- US Army Corps of Engineers. HEC-RAS User’s Manual. December 2020. Available online: https://www.hec.usace.army.mil/software/hec-ras/documentation/HEC-RAS_6.0_Users_Manual.pdf (accessed on 18 January 2021).
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Lampert, D.J.; Wu, M. Automated Approach for Construction of Long-Term, Data-Intensive Watershed Models. J. Comput. Civ. Eng. 2018, 32, 06018001. [Google Scholar] [CrossRef]
- USGS. USGS Water Data for the Nation. 2020. Available online: https://waterdata.usgs.gov/nwis (accessed on 4 March 2020).
- Moriasi, D.N.; Arnold, J.G.; van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. ASABE 1983, 50, 885–900. [Google Scholar] [CrossRef]
- Hsu, H.; Lachenbruch, P.A. Paired t Test. In Encyclopedia of Biostatistics; John Wiley & Sons, Ltd.: Chichester, UK, 2005. [Google Scholar] [CrossRef]
- Massey, F.J. The Kolmogorov-Smirnov Test for Goodness of Fit. J. Am. Stat. Assoc. 1951, 46, 68–78. [Google Scholar] [CrossRef]
- Roberts, W.; Williams, G. HydroErr·PyPI. 2019. Available online: https://pypi.org/project/HydroErr/ (accessed on 4 March 2020).
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zambrano-Bigiarini, M. hydroGOF package|R Documentation. 2020. Available online: https://www.rdocumentation.org/packages/hydroGOF/versions/0.3-10 (accessed on 4 March 2020).
- Hunter, J.D. Matplotlib: A 2D Graphics Environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Cheng, M.-Y.; Prayogo, D.; Wu, Y.-W. Novel Genetic Algorithm-Based Evolutionary Support Vector Machine for Optimizing High-Performance Concrete Mixture. J. Comput. Civ. Eng. 2013, 28, 06014003. [Google Scholar] [CrossRef] [Green Version]
- Shukla, P.K.; Deb, K.; Tiwari, S. Comparing Classical Generating Methods with an Evolutionary Multi-objective Optimization Method. Lect. Notes Comput. Sci. 2005, 3410, 311–325. [Google Scholar] [CrossRef]
- Hadka, D. Platypus-Opt·PyPI. 2018. Available online: https://pypi.org/project/Platypus-Opt/ (accessed on 4 March 2020).
- Read, L.K.; Hogue, T.S.; Edgley, R.; Mika, K.; Gold, M. Evaluating the Impacts of Stormwater Management on Streamflow Regimes in the Los Angeles River. J. Water Resour. Plan. Manag. 2019, 145, 05019016. [Google Scholar] [CrossRef]
- US Army Corps of Engineers. HEC-RAS Model for Stormwater Management Plan; US Army Corps of Engineers: Los Angeles, CA, USA, 2004. [Google Scholar]
- HDR CDM. HEC-RAS Model for San Gabriel River, San Jose Creek, Compton Creek, Upper Rio Hondo, Coyote Creek, Verdugo Wash, Arroyo Seco; HDR CDM: Irvine, CA, USA, 2011. [Google Scholar]
- US Army Corps of Engineers. HEC-RAS Model for Upper Los Angeles River and Tujunga Wash; US Army Corps of Engineers: Los Angeles, CA, USA, 2005. [Google Scholar]
- Environmental Science Associates. HEC-RAS Model for Glendale 2018 Wastewater Change Petition; Environmental Science Associates: Los Angeles, CA, USA, 2018. [Google Scholar]
- Los Angeles Department of Public Works, Los Angeles County Flood Control. 2011. Available online: https://dpw.lacounty.gov/lacfcd/WDR/fs.aspx (accessed on 4 March 2020).
- Ritter, A.; Muñoz-Carpena, R. Performance evaluation of hydrological models: Statistical significance for reducing subjectivity in goodness-of-fit assessments. J. Hydrol. 2013, 480, 33–45. [Google Scholar] [CrossRef]
- Chin, D.A. Water-Resources Engineering, 3rd ed.; Pearson: Upper Saddle River, NJ, USA, 2013. [Google Scholar]
- Bekele, E.G.; Nicklow, J.W. Evolutionary Algorithms for Multi-Objective, Automatic Calibration of a Semi-Distributed Hydrologic Model. In Proceedings of the World Environmental and Water Resource Congress 2006, Omaha, NE, USA, 21–25 May 2006; pp. 1–12. [Google Scholar] [CrossRef]
- Borthwick, M.F.; Packham, I.S.; Rafiq, M.Y. Interactive Visualization for Evolutionary Optimization of Conceptual Rainfall-Streamflow Models. J. Comput. Civ. Eng. 2008, 22, 40–49. [Google Scholar] [CrossRef]
- Yen, H.; Park, S.; Arnold, J.G.; Srinivasan, R.; Chawanda, C.J.; Wang, R.; Feng, Q.; Wu, J.; Miao, C.; Bieger, K.; et al. IPEAT+: A Built-In Optimization and Automatic Calibration Tool of SWAT+. Water 2019, 11, 1681. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Beeson, P.; Link, R.; Manowitz, D.; Izaurralde, R.C.; Sadeghi, A.; Thomson, A.M.; Sahajpal, R.; Srinivasan, R.; Arnold, J.G. Efficient multi-objective calibration of a computationally intensive hydrologic model with parallel computing software in Python. Environ. Model. Softw. 2013, 46, 208–218. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, S. Automating calibration, sensitivity and uncertainty analysis of complex models using the R package Flexible Modeling Environment (FME): SWAT as an example. Environ. Model. Softw. 2012, 31, 99–109. [Google Scholar] [CrossRef]
- Tang, Y.; Eddelbuettel, D.; Lewis, B.; Keydana, S.; Hafen, R.; Geelnard, M. Reticulate; RStudio: Boston, MA, USA, 2020. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Roughness Coefficient | R2 | RMSE (m) | NSE |
|---|---|---|---|
| 0.094 | 0.984 | 0.29 | 0.514 |
| 0.106 | 0.982 | 0.247 | 0.647 |
| 0.128 | 0.98 | 0.162 | 0.847 |
| 0.139 | 0.979 | 0.122 | 0.913 |
| 0.15 | 0.975 | 0.093 | 0.95 |
| Description | Gage ID | Manning’s n | NSE | RMSE (cm) | |||
|---|---|---|---|---|---|---|---|
| Automatic | Manual | Automatic | Manual | Automatic | Manual | ||
| Rio Hondo below Whittier Narrows Dam | 11102300 | 0.017 | 0.014 | 0.997 | 0.996 | 3.4 | 3.5 |
| Rio Hondo below spreading grounds | F45B | 0.016 | 0.014 | 0.989 | 0.983 | 1.9 | 2.4 |
| Compton Creek | F37B | 0.016 | 0.010 | 0.985 | 0.838 | 2.2 | 7.2 |
| Los Angeles River above confluence with Burbank Channel–Low Flows | F300 | 0.035 | 0.02 | 0.890 | −1.28 | 3.2 | 14.3 |
| Los Angeles River above confluence with Burbank Channel–High Flows | F300 | 0.020 | 0.008 | 0.933 | 0.888 | 6.8 | 8.6 |
| Los Angeles River near above tidal reach | F319 | 0.013 | 0.012 | 0.995 | 0.989 | 2.5 | 3.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Philippus, D.; Wolfand, J.M.; Abdi, R.; Hogue, T.S. Raspy-Cal: A Genetic Algorithm-Based Automatic Calibration Tool for HEC-RAS Hydraulic Models. Water 2021, 13, 3061. https://doi.org/10.3390/w13213061
Philippus D, Wolfand JM, Abdi R, Hogue TS. Raspy-Cal: A Genetic Algorithm-Based Automatic Calibration Tool for HEC-RAS Hydraulic Models. Water. 2021; 13(21):3061. https://doi.org/10.3390/w13213061
Chicago/Turabian StylePhilippus, Daniel, Jordyn M. Wolfand, Reza Abdi, and Terri S. Hogue. 2021. "Raspy-Cal: A Genetic Algorithm-Based Automatic Calibration Tool for HEC-RAS Hydraulic Models" Water 13, no. 21: 3061. https://doi.org/10.3390/w13213061
APA StylePhilippus, D., Wolfand, J. M., Abdi, R., & Hogue, T. S. (2021). Raspy-Cal: A Genetic Algorithm-Based Automatic Calibration Tool for HEC-RAS Hydraulic Models. Water, 13(21), 3061. https://doi.org/10.3390/w13213061