
Interfacial Friction Prediction in a Vertical Annular Two-Phase Flow Based on Support Vector Regression Machine


Abstract
:1. Introduction
2. Methodology
2.1. Interfacial Friction Factor Calculation Model and Empirical Formulas
2.2. Machine Learning Method
2.2.1. Support Vector Regression Machine
2.2.2. Particle Swarm Optimization
3. Model Development and Parametric Analysis
3.1. Data Processing
3.1.1. Data Collection
3.1.2. Data Normalization and Denormalization
3.2. SVR Input Variable Analysis
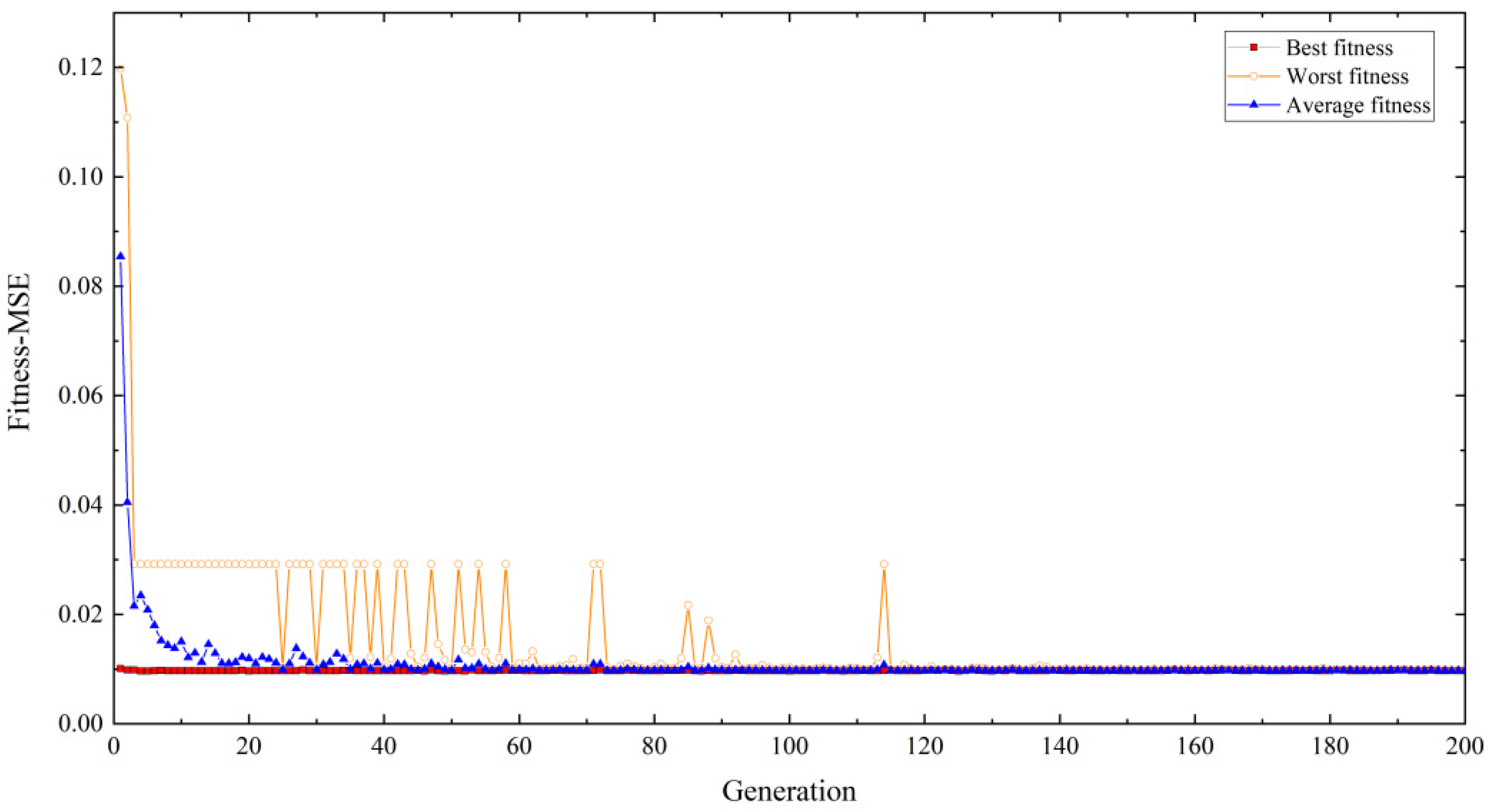
3.3. Parameter Optimization of PSO-SVR Model
4. Result
4.1. Comparison of Different Input Parameter Combinations
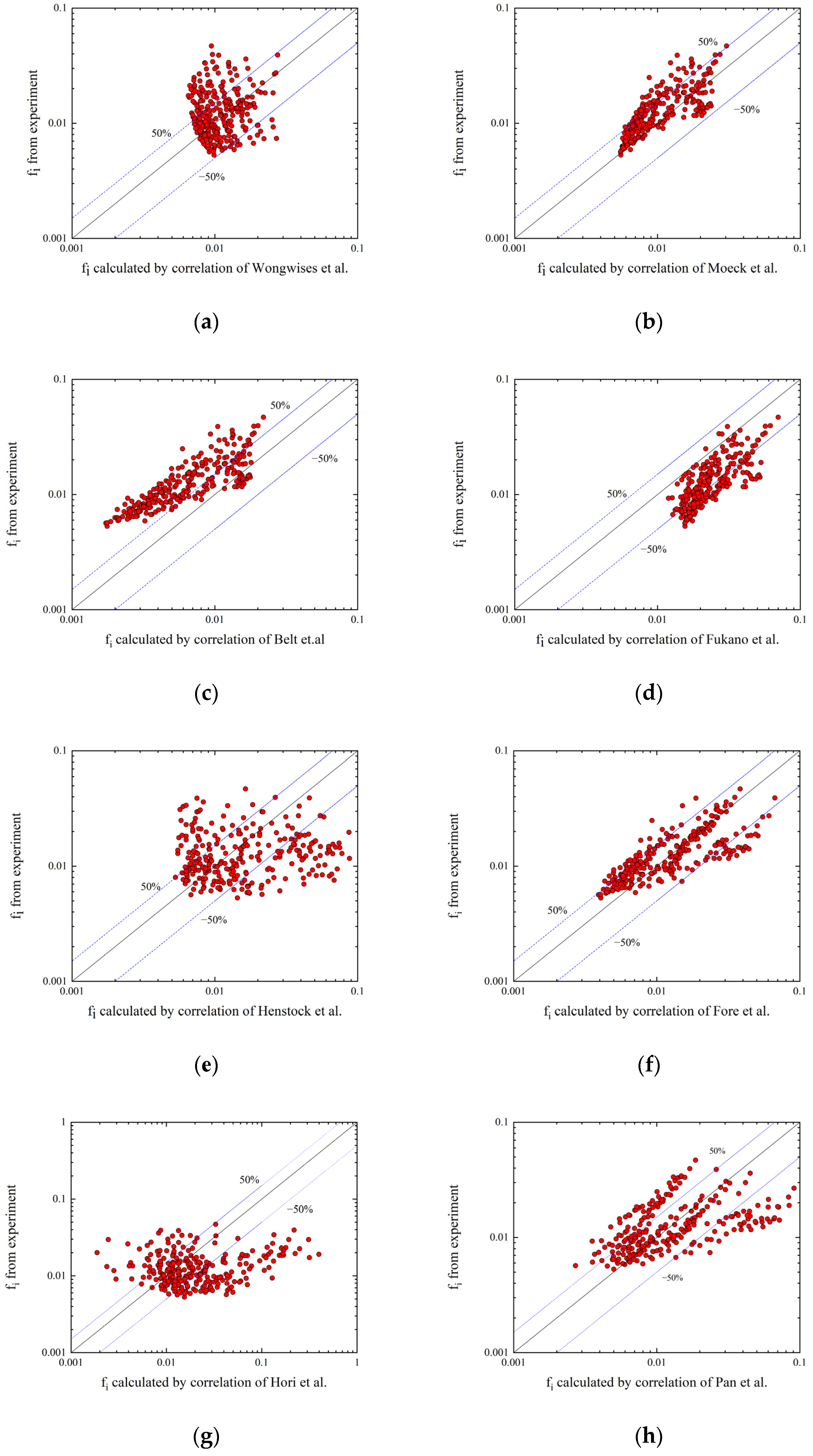
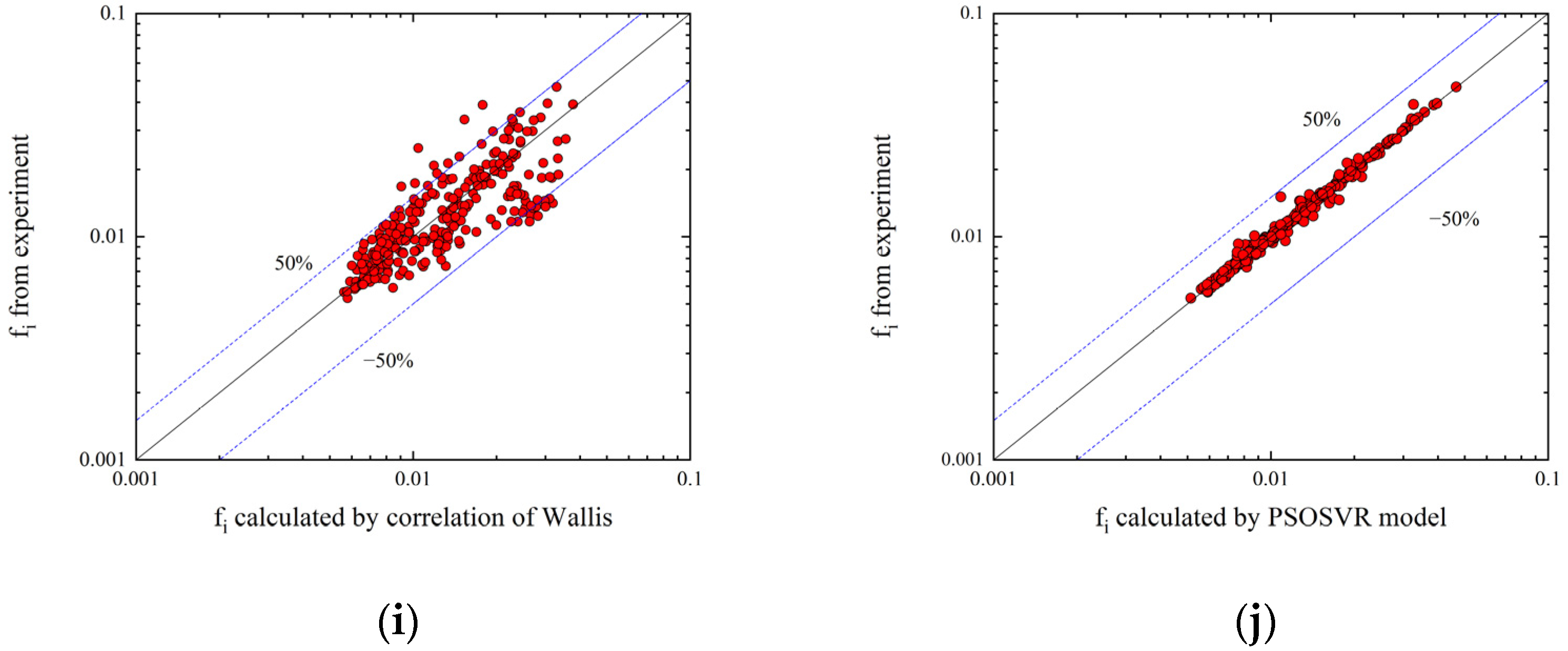
4.2. Comparison of Optimal Model with Empirical Formulas
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wongwises, S.; Kongkiatwanitch, W. Interfacial friction factor in vertical upward gas-liquid annular two-phase follow. Int. Commun. Heat Mass Transf. 2001, 28, 323–336. [Google Scholar] [CrossRef]
- Mcquillan, K.W.; Whalley, P.B. Flow patterns in vertical two-phase flow. Int. J. Multiph. Flow 1985, 11, 161–175. [Google Scholar] [CrossRef]
- Aliyu, A.M.; Baba, Y.D.; Lao, L.; Yeung, H.; Kim, K.C. Interfacial friction in upward annular gas–liquid two-phase flow in pipes. Exp. Therm. Fluid Sci. 2017, 84, 90–109. [Google Scholar] [CrossRef]
- Alves, I.M.; Caetano, E.F.; Minami, K.; Shoham, O. Modeling annular flow behavior for gas wells. SPE Prod. Eng. 1991, 6, 435–440. [Google Scholar] [CrossRef]
- Cioncolini, A.; Thome, J.R.; Lombardi, C. Algebraic turbulence modeling in adiabatic gas–liquid annular two-phase flow. Int. J. Multiph. Flow 2009, 35, 580–596. [Google Scholar] [CrossRef]
- Han, H.; Zhu, Z.; Gabriel, K. A study on the effect of gas flow rate on the wave characteristics in two-phase gas–liquid annular flow. Nucl. Eng. Des. 2006, 236, 2580–2588. [Google Scholar] [CrossRef]
- Hewitt, G.F. Annular Two-Phase Flow; Pergamon Press: Oxford, UK, 1970. [Google Scholar]
- Zhao, Y. Wave Behaviour in Vertical Multiphase Flow. Ph.D. Thesis, Imperial College London, London, UK, 2014. [Google Scholar]
- Wang, Z.; Gabriel, K.S.; Manz, D.L. The influences of wave height on the interfacial friction in annular gas–liquid flow under normal and microgravity conditions. Int. J. Multiph. Flow 2004, 30, 1193–1211. [Google Scholar] [CrossRef]
- Wallis, G.B. One Dimensional Two-Phase Flow; McGraw-Hill: New York, NY, USA, 1969. [Google Scholar]
- Ambrosini, W.; Andreussi, P.; Azzopardi, B.J. A physically based correlation for drop size in annular flow. Int. J. Multiph. Flow 1991, 17, 497–507. [Google Scholar] [CrossRef]
- Asali, J.C.; Hanratty, T.J.; Paolo, A. Interfacial drag and film height for vertical annular flow. AIChE J. 2010, 31, 895–902. [Google Scholar] [CrossRef]
- Belt, R.J.; Westende, J.M.C.V.; Portela, L.M. Prediction of the interfacial shear-stress in vertical annular flow. Int. J. Multiph. Flow 2009, 35, 689–697. [Google Scholar] [CrossRef]
- Henstock, W.H.; Hanratty, T.J. The interfacial drag and the height of the wall layer in annular flows. AIChE J. 1976, 22, 990–1000. [Google Scholar] [CrossRef]
- Moeck, E.O. Annular-Dispersed Two-Phase Flow and Critical Heat Flux; Atomic Energy of Canada Ltd.: Joe Cleaver, ON, Canada, 1970. [Google Scholar]
- Hori, K.; Nakasatomi, M.; Nishikawa, K.; Sekoguchi, K. Study of ripple region in annular two-phase flow (third report, effect of liquid viscosity on gas-liquid interfacial character and friction factor). Trans. Jpn. Soc. Mech. Eng. 1978, 44, 3847–3856. [Google Scholar] [CrossRef] [Green Version]
- Fukano, T.; Ito, A.; Miyabe, K.; Takamatsu, Y. Liquid Films Flowing Concurrently with Air in Horizontal Duct: 6th Report, Generation of a Disturbance Wave and its Role in the Breakdown of Liquid films. Plant Physiol. 1985, 28, 2302–2309. [Google Scholar] [CrossRef]
- Fukano, T.; Ousaka, A.; Kawakami, Y.; Tominaga, A. Interfacial shear stress and holdup in an air–water annular two-phase flow. In Proceedings of the ASME-JSME Thermal Engineering Joint Conference, Reno, NV, USA, 17–22 March 1991; Volume 2, p. 217. [Google Scholar]
- Fukano, T.; Furukawa, T. Prediction of the effects of liquid viscosity on interfacial shear stress and frictional pressure drop in vertical upward gas–liquid annular flow. Int. J. Multiph. Flow 1998, 24, 587–603. [Google Scholar] [CrossRef]
- Holt, A.J.; Azzopardi, B.J.; Biddulph, M.W. Calculation of two-phase pressure drop for vertical upflow in narrow passages by means of a flow pattern specific model. Chem. Eng. Res. Des. 1999, 77, 7–15. [Google Scholar] [CrossRef]
- Fore, L.B.; Beus, S.G.; Bauer, R.C. Interfacial friction in gas–liquid annular flow: Analogies to full and transition roughness. Int. J. Multiph. Flow 2000, 26, 1755–1769. [Google Scholar] [CrossRef] [Green Version]
- Pan, L.M.; He, H.; Ju, P.; Hibiki, T.; Ishii, M. The influences of gas–liquid interfacial properties on interfacial shear stress for vertical annular flow. Int. J. Heat Mass Transf. 2015, 89, 1172–1183. [Google Scholar] [CrossRef]
- Boser, B.E.; Guyon, I.M.; Vapnik, V.N. A training algorithm for optimal margin classifiers. In Proceedings of the 5th Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992; pp. 144–152. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Smola, A.J. Regression Estimation with Support Vector Learning Machines. Master’s Thesis, Technische Universität München, München, Germany, 1996. [Google Scholar]
- Drucker, H.; Burges, C.J.; Kaufman, L.; Smola, A.; Vapnik, V. Support vector regression machines. Advances in Neural Information Process. Syst. 1997, 9, 155–161. [Google Scholar]
- Vapnik, V.; Golowich, S.E.; Smola, A. Support vector method for function approximation, regression estimation, and signal processing. Adv. Neural Inform. Process. Syst. 1997, 9, 281–287. [Google Scholar]
- Burges, C.J. A tutorial on support vector machines for pattern recognition. Data Min. Knowl. Discov. 1998, 2, 121–167. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Fore, L.B.; Dukler, A.E. Droplet deposition and momentum transfer in annular flow. AIChE J. 1995, 41, 2040–2046. [Google Scholar] [CrossRef]
- Müller, K.R.; Smola, A.J.; Rätsch, G.; Schölkopf, B.; Kohlmorgen, J.; Vapnik, V. Predicting time series with support vector machines. In Lecture Notes in Computer Science, Proceedings of the Artificial Neural Networks—ICANN’97, Lausanne, Switzerland, 8–10 October 1997; Springer: Berlin/Heidelberg, Germany, 1997; pp. 999–1004. [Google Scholar]
- Smola, A.J.; Schölkopf, B.; Müller, K.R. General cost functions for support vector regression. In Proceedings of the 8th International Conference on Artificial Neural Networks, Skövde, Sweden, 2–4 September 1998. [Google Scholar]
- Schölkopf, B.; Smola, A. Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond. Publ. Am. Stat. Assoc. 2002, 98, 489. [Google Scholar]
- Shang, Y. Limit of a nonpreferential attachment multitype network model. Int. J. Mod. Phys. B 2017, 31, 1750026. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Shi, Y.; Eberhart, R. A Modified Particle Swarm Optimizer. Evolutionary Computation. In Proceedings of the IEEE World Congress on Computational Intelligence, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Asali, J.C. Entrainment in Vertical Gas-Liquid Annular Flows. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Ann Arbor, MI, USA, 1984. [Google Scholar]
- Shearer, C.J.; Nedderman, R.M. Pressure gradient and liquid film thickness in co-current upwards flow of gas/liquid mixtures: Application to film-cooler design. Chem. Eng. Sci. 1965, 20, 671–683. [Google Scholar] [CrossRef]
- Hewitt, G.F.; Roberts, D.N. Studies of Two-Phase Flow Patterns by Simultaneous X-ray and Flast Photography; Atomic Energy Research Establishment: Harwell, UK, 1969. [Google Scholar]
- Zhong, Z.; Carr, T.R. Application of mixed kernels function (MKF) based support vector regression model (SVR) for CO2–Reservoir oil minimum miscibility pressure prediction. Fuel 2016, 184, 590–603. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Formula |
|---|---|
| (Wongwises et al., 2001) [1] | |
| (Belt et al., 2009) [13] | |
| (Henstock et al., 1976) [14] | , |
| (Moeck, 1970) [15] | |
| (Hori et al., 1978) [16] | , |
| (Fukano et al., 1997) [19] | |
| (Pan et al., 2015b) [22] | |
| (Wallis, 1969) [10] | , |
| (Fore et al., 2000) [21] |
| Researchers | Ug | UL | D (mm) | No. Points |
|---|---|---|---|---|
| (Wongwises et al., 2001) [1] | 9–34 | 0.05–0.20 | 29 | 39 |
| (Fore and Dukler, 1995) [30] | 16–37 | 0.006–0.066 | 50.8 | 44 |
| (Asali, 1984) [37] | 14–96 | 0.001–0.128 | 22.9; 42 | 161 |
| (Shearer and Nedderman, 1967) [38] | 28–132 | 0.002–0.017 | 16; 32 | 24 |
| Evaluation Index | Value |
|---|---|
| Maximum absolute error, | |
| Maximum relative error, | |
| Average absolute error, | |
| Correlation coefficient, | |
| Coefficient of determination, | |
| Root mean square error, |
| Control Parameter | Value | Control Parameter | Value |
|---|---|---|---|
| Original inertia weight | 0.9 | Final inertia weight | 0.4 |
| Global search factor | 1.5 | maxgen | 200 |
| Local search factor | 1.5 | sizepop | 50 |
| Input Parameter Combination | Dataset | Statistical Parameters | |||||
|---|---|---|---|---|---|---|---|
| RMSE | MAE | AAE | MRE | r | R2 | ||
| 1:, , | Training set | 0.00295 | 0.019 | 0.0016 | 9.63% | 0.922 | 0.851 |
| Testing set | 0.00126 | 0.004 | 0.0010 | 6.96% | 0.969 | 0.939 | |
| Total | 0.00283 | 0.019 | 0.0015 | 9.36% | 0.924 | 0.853 | |
| 2:, , , , | Training set | 0.00074 | 0.006 | 0.0004 | 3.09% | 0.995 | 0.990 |
| Testing set | 0.00087 | 0.003 | 0.0007 | 4.91% | 0.987 | 0.975 | |
| Total | 0.00076 | 0.006 | 0.0004 | 3.27% | 0.995 | 0.989 | |
| No. | Formula | Nre<50% | RMSE | MAE | AAE | ARE | R2 |
|---|---|---|---|---|---|---|---|
| 1 | Wongwises et al. | 184 | 0.00830 | 0.0374 | 0.0057 | 40.34% | 0.0134 |
| 2 | Moeck et al. | 243 | 0.00560 | 0.0252 | 0.0039 | 24.49% | 0.5382 |
| 3 | Belt et al. | 126 | 0.00780 | 0.0284 | 0.0064 | 47.19% | 0.5543 |
| 4 | Fukano et al. | 61 | 0.01320 | 0.0381 | 0.0113 | 95.88% | 0.5412 |
| 5 | Henstock et al. | 130 | 0.02040 | 0.0760 | 0.0134 | 108.51% | 0.0034 |
| 6 | Fore et al. | 218 | 0.00860 | 0.0334 | 0.0054 | 38.44% | 0.4318 |
| 7 | Hori et al. | 101 | 0.05540 | 0.3784 | 0.0267 | 173.65% | 0.0855 |
| 8 | Pan et al. | 179 | 0.01730 | 0.0849 | 0.0099 | 64.77% | 0.1543 |
| 9 | Wallis | 232 | 0.00570 | 0.0211 | 0.0038 | 26.54% | 0.4926 |
| 10 | PSO-SVR | 268 | 0.00076 | 0.0060 | 0.0004 | 3.27% | 0.9890 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Feng, X.; Chen, J. Interfacial Friction Prediction in a Vertical Annular Two-Phase Flow Based on Support Vector Regression Machine. Water 2021, 13, 3609. https://doi.org/10.3390/w13243609
Liu Q, Feng X, Chen J. Interfacial Friction Prediction in a Vertical Annular Two-Phase Flow Based on Support Vector Regression Machine. Water. 2021; 13(24):3609. https://doi.org/10.3390/w13243609
Chicago/Turabian StyleLiu, Qiang, Xingya Feng, and Junru Chen. 2021. "Interfacial Friction Prediction in a Vertical Annular Two-Phase Flow Based on Support Vector Regression Machine" Water 13, no. 24: 3609. https://doi.org/10.3390/w13243609
APA StyleLiu, Q., Feng, X., & Chen, J. (2021). Interfacial Friction Prediction in a Vertical Annular Two-Phase Flow Based on Support Vector Regression Machine. Water, 13(24), 3609. https://doi.org/10.3390/w13243609