
Influence of the Drag Force on the Average Absorbed Power of Heaving Wave Energy Converters Using Smoothed Particle Hydrodynamics

 ,
,  , ,
, , 

Abstract
:1. Introduction
2. Smoothed Particle Hydrodynamics—DualSPHysics
2.1. Governing Equations
2.2. Boundary Conditions
2.3. Floating Bodies
2.4. Coupling Dualsphysics—Project Chrono
3. Methodology
3.1. Determination of Hydrodynamic Coefficients Using DualSPHysics
3.2. Derivation of the Equation of Motion and the Optimal Damping Coefficient Including the Effect of Drag Forces
3.2.1. Linear Damping PTO System
3.2.2. Coulomb Damping PTO System
4. Test Cases and Numerical Setup
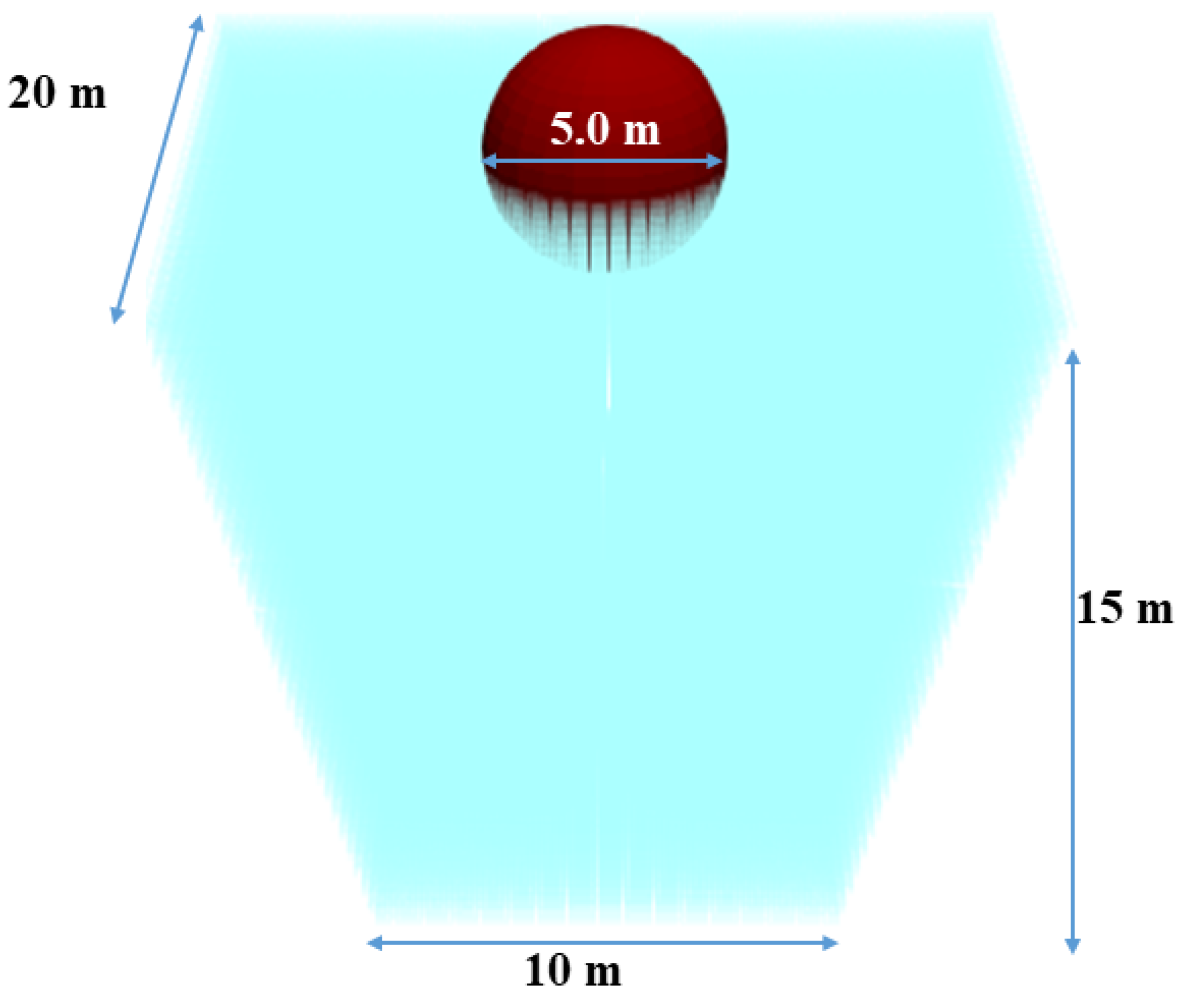
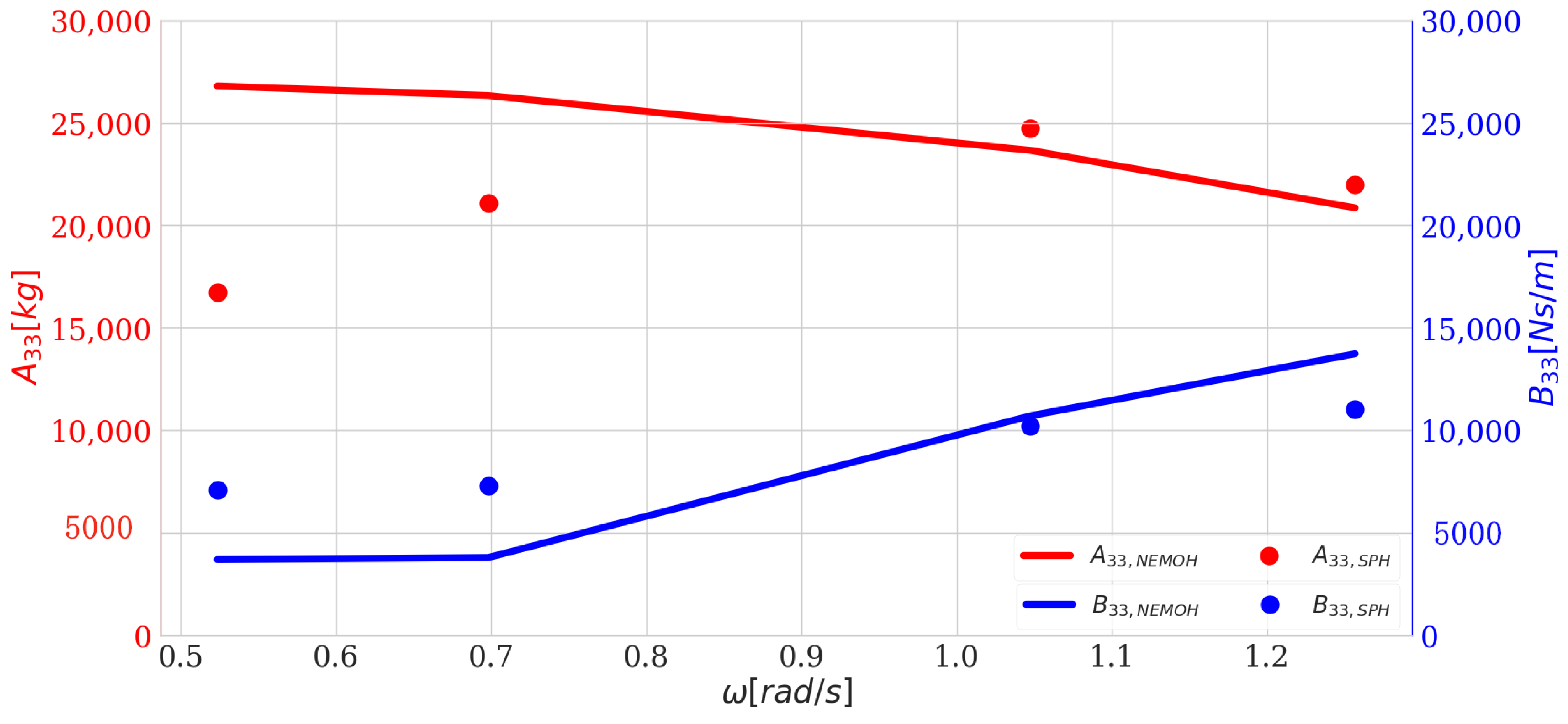
- A heaving sphere with a diameter of 5 m, as studied in [32]. For this WEC, the added mass and hydrodynamic damping were also estimated wtih DualSPHysics.
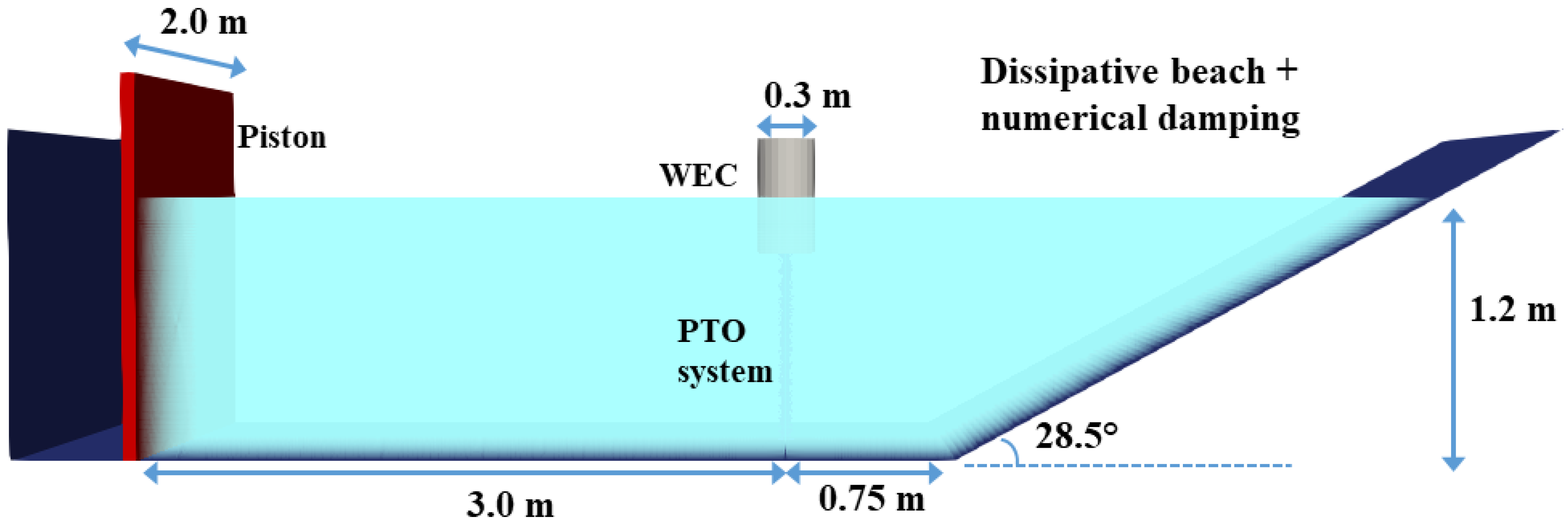
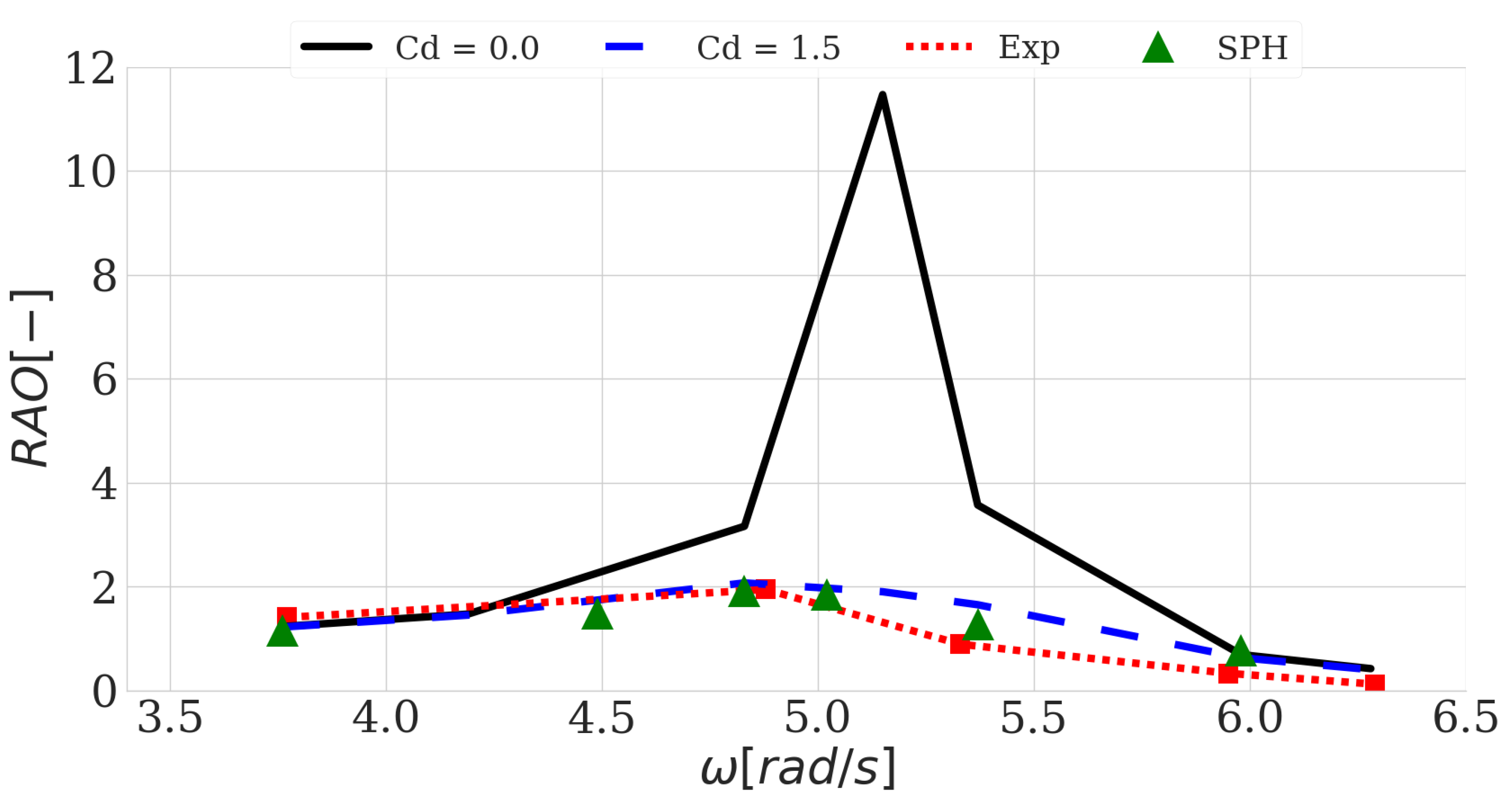
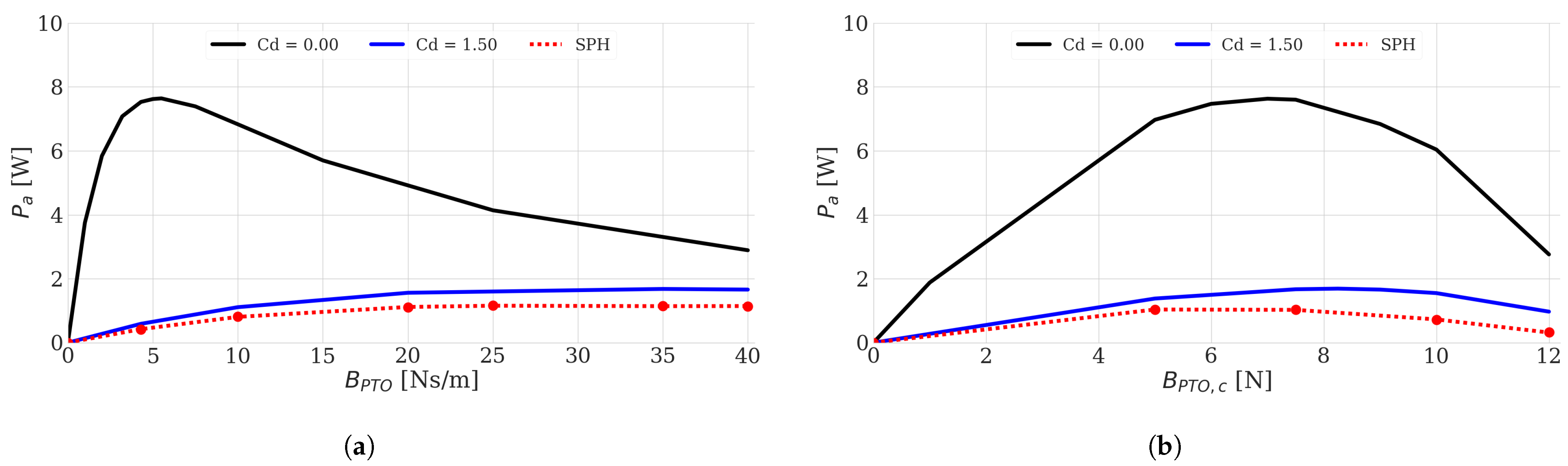
- A cylindrical WEC with a diameter of 0.3 m and draft of 0.28 m, as studied in [34,57], hereafter referred to as ’cylinder2’. This WEC is studied in more detail by analyzing its response amplitude operator (RAO) and comparing it with the experimental results found in [57]. The WEC is also simulated with two kinds of PTO systems (a linear damping and a Coulomb damping PTO system) and the average absorbed power is compared for a range of damping coefficients.
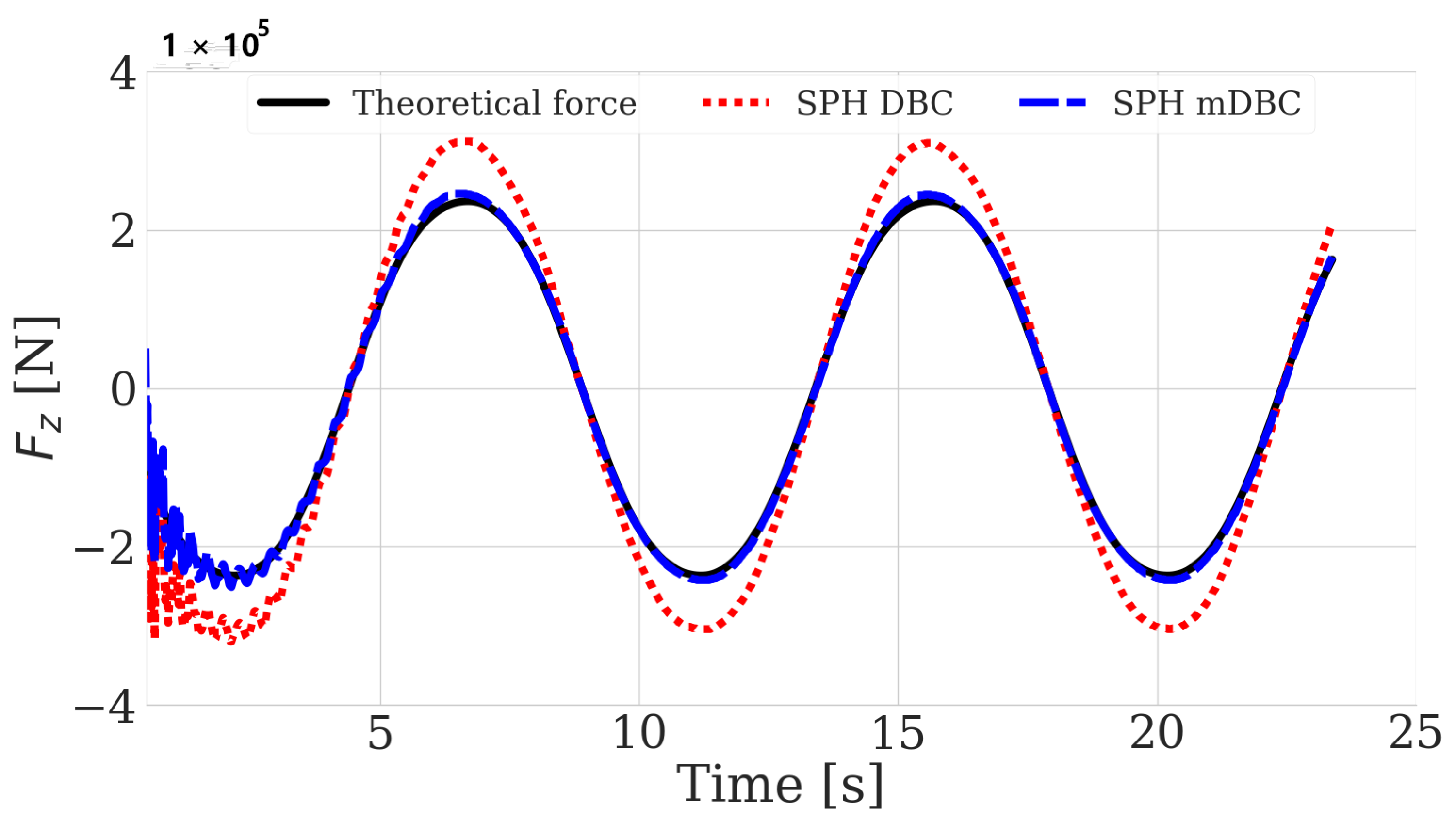
- Simulations were carried out with two different types of boundary conditions: Dynamic Boundary Conditions (DBC) and modified Dynamic Boundary Conditions (mDBC), as described in Section 2.2. Both SPH results were compared to the theoretical force calculated with Equation (23), with the hydrodynamic coefficients from NEMOH and as in [32]. It is clear from Figure 4 that mDBC gave significantly better results compared to DBC. When mDBC was applied, the repulsive forces exerted by the boundary particles of the sphere were much smaller than when applying DBC, resulting in a smaller gap between the sphere and the fluid.
- Artificial viscosity was applied with an artificial viscosity coefficient . Artificial viscosity was introduced into SPH in [14] and was used primarily due to its simplicity [18]. It was stated in [59] that this artificial viscosity corresponds to an equivalent kinematic viscosity of (in 2D), which is generally much higher than the real kinematic viscosity of water = 1 × 10 m²/s. Therefore, one way of reducing the numerical dissipation caused by artificial viscosity is by lowering ; however, this was not preferred since the value of has been proven to give the best results in the validation of wave flumes to study the wave propagation and wave loadings exerted onto coastal structures [21,42] and is also the value used when simulating the WEC in regular waves. Only in the case where the hydrodynamic coefficients and are computed is set to be equal to zero, as described in Section 3.1.
- The initial speed of sound was set to , with d being the depth of the numerical wave basin. It was found that convergence was reached with a lower resolution when the speed of sound was decreased. This can be related to the influence of on the viscosity: it is stated in [59] that the equivalent kinematic viscosity associated with the artificial viscous term has the form . Further decreasing leads to overly large timesteps and therefore less accurate results.
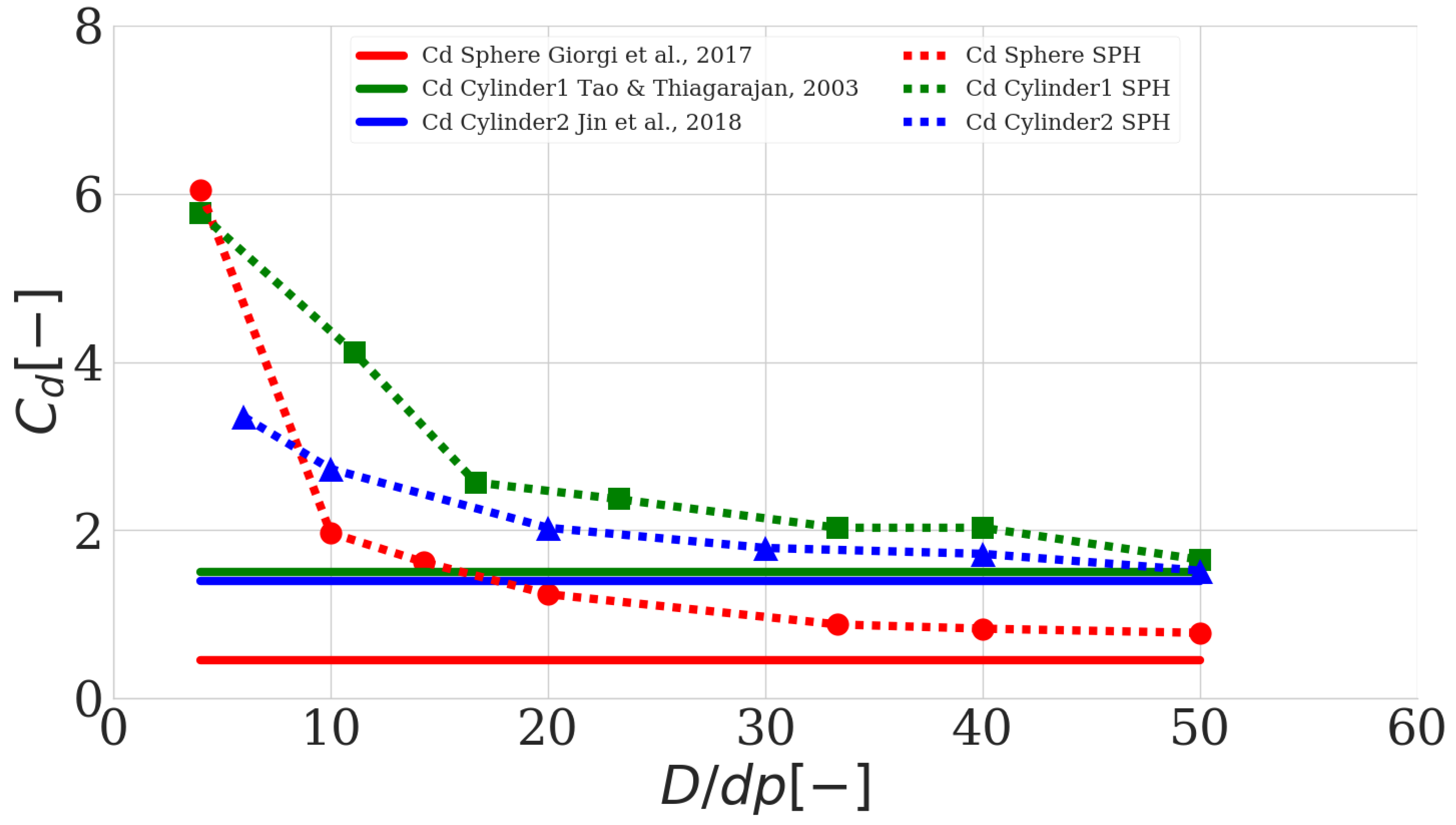
- A convergence test was done by varying the interparticle distance and studying the resulting hydrodynamic coefficients , and the drag coefficient , calculated with Equations (28), (30) and (31), respectively. The hydrodynamic coefficients were compared to results from potential flow theory obtained with NEMOH and the drag coefficient was compared to results from previous experimental or numerical tests from [32,33,34]. The results of these convergence tests are described in Section 5.
- The domain size of the basin was set to be large enough to avoid interaction with side walls (see Figure 5). Sloped sidewalls were provided as well as numerical damping layers, with the aim of reducing side wall reflection.
5. Results and Discussion
5.1. Estimation of the Hydrodynamic Coefficients and of the Drag Coefficient
5.2. Cylindrical WEC in Regular Waves
5.2.1. Undamped Heaving WEC
5.2.2. Linear Damping PTO System
5.2.3. Coulomb Damping PTO System
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| a | Heave amplitude of the WEC (m) |
| Cross-sectional area of the heaving WEC (m²) | |
| Added mass (kg) | |
| Hydrodynamic damping in heave (Ns/m) | |
| Linear PTO system damping coefficient (Ns/m) | |
| Coulomb damping PTO system damping coefficient (N) | |
| Drag coefficient (-) | |
| Speed of sound in DualSPHysics (m/s) | |
| D | WEC diameter (m) |
| d | Depth of the numerical basin (m) |
| Interparticle distance in DualSPHysics (m) | |
| Excitation force (N) | |
| Hydrostatic force (N) | |
| Radiation force (N) | |
| PTO system force (N) | |
| Coulomb damping PTO system force (N) | |
| Rotal vertical force acting on the heaving WEC (N) | |
| Force per unit mass acting on boundary particle k (N/kg) | |
| g | Gravitational acceleration (m/s²) |
| H | Wave height (m) |
| h | Smoothing length in DualSPHysics (m) |
| Hydrostatic spring stiffness (N/m) | |
| k | Wave number (1/m) |
| m | WEC’s mass (kg) |
| P | Fluid pressure (Pa) |
| Average absorbed power (W) | |
| Position of particle k in DualSPHysics (m) | |
| T | Wave period (s) |
| t | Time (s) |
| Vertical fluid velocity (m/s) | |
| v | WEC’s heave velocity (m/s) |
| WEC’s relative velocity, equal to , (m/s) | |
| W | Kernel function |
| Half of the WEC’s draft (m) | |
| Artificial viscosity coefficient applied in DualSPHysics | |
| Ratio of the WEC’s relative velocity amplitude to the WEC’s velocity amplitude | |
| Artificial viscosity term in DualSPHysics (m²/s) | |
| Fluid density (kg/m³) | |
| Velocity potential | |
| Phaseshift between and v (rad) | |
| Rotational velocity (rad/s) | |
| Angular wave frequency (rad/s) | |
| Complex amplitude | |
| CFD | Computational Fluid Dynamics |
| DBC | Dynamic Boundary Condition |
| mDBC | Modified DBC |
| PTO | Power take-off |
| SPH | Smoothed Particle Hydrodynamics |
| WEC | Wave Energy Converter |
References
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. Proc. Inst. Mech. Eng. Part A J. Power Energy 2009, 223, 887–902. [Google Scholar] [CrossRef] [Green Version]
- Fernandez, G.V.; Balitsky, P.; Stratigaki, V.; Troch, P. Coupling methodology for studying the far field effects of wave energy converter arrays over a varying bathymetry. Energies 2018, 11, 2899. [Google Scholar] [CrossRef] [Green Version]
- Balitsky, P.; Verao Fernandez, G.; Stratigaki, V.; Troch, P. Assessing the Impact on Power Production of WEC array separation distance in a wave farm using one-way coupling of a BEM solver and a wave propagation model. In Proceedings of the Twelfth European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017; pp. 1176-1–1176-10. [Google Scholar]
- Josh, D.; Ronan, C. Efficient nonlinear hydrodynamic models for wave energy converter design—A scoping study. J. Mar. Sci. Eng. 2020, 8, 35. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yu, Y.H. A synthesis of numerical methods for modeling wave energy converter-point absorbers. Renew. Sustain. Energy Rev. 2012, 16, 4352–4364. [Google Scholar] [CrossRef]
- Folley, M. (Ed.) Numerical Modelling of Wave Energy Converters; Academic Press, School of Planning, Architecture and Civil Engineering, Queen’s University Belfast: Belfast, UK, 2016. [Google Scholar]
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015; pp. 1–12. [Google Scholar]
- Windt, C.; Davidson, J.; Ringwood, J.V. High-fidelity numerical modelling of ocean wave energy systems: A review of computational fluid dynamics-based numerical wave tanks. Renew. Sustain. Energy Rev. 2018, 93, 610–630. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.H.; Li, Y. Reynolds-Averaged Navier-Stokes simulation of the heave performance of a two-body floating-point absorber wave energy system. Comput. Fluids 2013, 73, 104–114. [Google Scholar] [CrossRef]
- Reabroy, R.; Zheng, X.; Zhang, L.; Zang, J.; Yuan, Z.; Liu, M.; Sun, K.; Tiaple, Y. Hydrodynamic response and power efficiency analysis of heaving wave energy converter integrated with breakwater. Energy Convers. Manag. 2019, 195, 1174–1186. [Google Scholar] [CrossRef]
- Gotoh, H.; Khayyer, A. On the state-of-the-art of particle methods for coastal and ocean engineering. Coast. Eng. J. 2018, 60, 79–103. [Google Scholar] [CrossRef]
- Manenti, S.; Wang, D.; Domínguez, J.M.; Li, S.; Amicarelli, A.; Albano, R. SPH modeling of water-related natural hazards. Water 2019, 11, 1875. [Google Scholar] [CrossRef] [Green Version]
- Violeau, D.; Rogers, B.D. Smoothed particle hydrodynamics (SPH) for free-surface flows: Past, present and future. J. Hydraul. Res. 2016, 54, 1–26. [Google Scholar] [CrossRef]
- Monaghan, J.J. Smoothed Particle Hydrodynamics. Annu. Rev. Astron. Astrophys. 1992, 30, 543–574. [Google Scholar] [CrossRef]
- Westphalen, J.; Greaves, D.; Raby, A.; Hu, Z.; Causon, D.; Mingham, C.; Omidvar, P.; Stansby, P.; Rogers, B. Investigation of Wave-Structure Interaction Using State of the Art CFD Techniques. Open J. Fluid Dyn. 2013, 4. [Google Scholar] [CrossRef] [Green Version]
- Omidvar, P.; Stansby, P.K.; Rogers, B.D. SPH for 3D floating bodies using variable mass particle distribution. Int. J. Numer. Methods Fluids 2013, 72, 427–452. [Google Scholar] [CrossRef]
- Ropero-Giralda, P.; Crespo, A.J.; Tagliafierro, B.; Altomare, C.; Domínguez, J.M.; Gómez-Gesteira, M.; Viccione, G. Efficiency and survivability analysis of a point-absorber wave energy converter using DualSPHysics. Renew. Energy 2020, 162, 1763–1776. [Google Scholar] [CrossRef]
- Crespo, A.J.; Domínguez, J.M.; Rogers, B.D.; Gómez-Gesteira, M.; Longshaw, S.; Canelas, R.; Vacondio, R.; Barreiro, A.; García-Feal, O. DualSPHysics: Open-source parallel CFD solver based on Smoothed Particle Hydrodynamics (SPH). Comput. Phys. Commun. 2015, 187, 204–216. [Google Scholar] [CrossRef]
- Canelas, R.B.; Brito, M.; Feal, O.G.; Domínguez, J.M.; Crespo, A.J. Extending DualSPHysics with a Differential Variational Inequality: Modeling fluid-mechanism interaction. Appl. Ocean Res. 2018, 76, 88–97. [Google Scholar] [CrossRef]
- Tasora, A.; Anitescu, M. A matrix-free cone complementarity approach for solving large-scale, nonsmooth, rigid body dynamics. Comput. Methods Appl. Mech. Eng. 2011, 200, 439–453. [Google Scholar] [CrossRef] [Green Version]
- Altomare, C.; Domínguez, J.M.; Crespo, A.J.; González-Cao, J.; Suzuki, T.; Gómez-Gesteira, M.; Troch, P. Long-crested wave generation and absorption for SPH-based DualSPHysics model. Coast. Eng. 2017, 127, 37–54. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Domínguez, J.M.; Crespo, A.J.; Altomare, C.; Stratigaki, V.; Troch, P.; Kortenhaus, A. Coupling methodology for smoothed particle hydrodynamics modelling of non-linear wave-structure interactions. Coast. Eng. 2018, 138, 184–198. [Google Scholar] [CrossRef]
- Domínguez, J.M.; Crespo, A.J.; Hall, M.; Altomare, C.; Wu, M.; Stratigaki, V.; Troch, P.; Cappietti, L.; Gómez-Gesteira, M. SPH simulation of floating structures with moorings. Coast. Eng. 2019, 153. [Google Scholar] [CrossRef]
- Tagliafierro, B.; Crespo, A.J.C.; Domínguez, J.M.; Feal, O.G.; Gesteira, G.; Canelas, R.B.; Coe, R.G.; Bacelli, G.; Cho, H.; Spencer, S.J. Numerical Modelling of a Point—Absorbing WEC Model Using DualSPHysics Coupled with a Multiphysics Library. In Proceedings of the Thirteenth European Wave and Tidal Energy Conference, Naples, Italy, 1–6 September 2019; pp. 1172-1–1176-8. [Google Scholar]
- Zoontjes, R.; Siegersma, H.; Ottens, H. Using CFD to determine heave added mass and damping of a suction pile. Proc. Int. Conf. Offshore Mech. Arct. Eng. OMAE 2009, 5, 407–416. [Google Scholar] [CrossRef]
- Kim, J.H.; Lakshmynarayanana, P.; Temarel, P. Added mass and damping coefficients for a uniform flexible barge using VOF. In Proceedings of the 11th International Conference on Hydrodynamics, Singapore, 19–24 October 2014. [Google Scholar]
- Bonfiglio, L. Added mass and damping of oscillating bodies: A fully viscous numerical approach. Recent Adv. Fluid Mech. Heat Mass Transf. Biol. 2011, 1, 210–215. [Google Scholar]
- Ramli, M.Z.; Temarel, P.; Tan, M. Hydrodynamic Coefficients for a 3-D Uniform Flexible Barge Using Weakly Compressible Smoothed Particle Hydrodynamics. J. Mar. Sci. Appl. 2018, 17, 330–340. [Google Scholar] [CrossRef] [Green Version]
- Gholami Korzani, M.; Galindo-Torres, S.A.; Scheuermann, A.; Williams, D.J. Parametric study on smoothed particle hydrodynamics for accurate determination of drag coefficient for a circular cylinder. Water Sci. Eng. 2017, 10, 143–153. [Google Scholar] [CrossRef]
- Tafuni, A.; Domínguez, J.M.; Vacondio, R.; Crespo, A.J. A versatile algorithm for the treatment of open boundary conditions in Smoothed particle hydrodynamics GPU models. Comput. Methods Appl. Mech. Eng. 2018, 342, 604–624. [Google Scholar] [CrossRef]
- Novak, G.; Domínguez, J.M.; Tafuni, A.; Četina, M.; Žagar, D. Evaluation of the drag coefficient of a fully submerged body using SPH. Acta Hydrotech. 2019, 32, 107–119. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Consistency of viscous drag identification tests for wave energy applications. In Proceedings of the 12th European Wave and Tidal Energy Conference (EWTEC), Cork Cork, Ireland, 27 August–2 September 2017; pp. 643-1–643-8. [Google Scholar]
- Tao, L.; Thiagarajan, K. Low KC flow regimes of oscillating sharp edges. II. Hydrodynamic forces. Appl. Ocean Res. 2003, 25, 53–62. [Google Scholar] [CrossRef]
- Jin, S.; Patton, R.J.; Guo, B. Viscosity effect on a point absorber wave energy converter hydrodynamics validated by simulation and experiment. Renew. Energy 2018, 129, 500–512. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Stratigaki, V.; Altomare, C.; Domínguez, J.M.; Troch, P.; Kortenhaus, A. Implementation of open boundaries within a two-way coupled SPH model to simulate nonlinear wave-structure interactions. Energies 2019, 12, 697. [Google Scholar] [CrossRef] [Green Version]
- Wendland, H. Piecewise polynomial, positive definite and compactly supported radial functions of minimal degree. Adv. Comput. Math. 1995, 4, 389–396. [Google Scholar] [CrossRef]
- Dehnen, W.; Aly, H. Improving convergence in smoothed particle hydrodynamics simulations without pairing instability. Mon. Not. R. Astron. Soc. 2012, 425, 1068–1082. [Google Scholar] [CrossRef] [Green Version]
- Molteni, D.; Colagrossi, A. A simple procedure to improve the pressure evaluation in hydrodynamic context using the SPH. Comput. Phys. Commun. 2009, 180, 861–872. [Google Scholar] [CrossRef]
- Antuono, M.; Colagrossi, A.; Marrone, S. Numerical diffusive terms in weakly-compressible SPH schemes. Comput. Phys. Commun. 2012, 183, 2570–2580. [Google Scholar] [CrossRef]
- Antuono, M.; Colagrossi, A.; Marrone, S.; Molteni, D. Free-surface flows solved by means of SPH schemes with numerical diffusive terms. Comput. Phys. Commun. 2010, 181, 532–549. [Google Scholar] [CrossRef]
- Fourtakas, G.; Dominguez, J.M.; Vacondio, R.; Rogers, B.D. Local uniform stencil (LUST) boundary condition for arbitrary 3-D boundaries in parallel smoothed particle hydrodynamics (SPH) models. Comput. Fluids 2019, 190, 346–361. [Google Scholar] [CrossRef]
- Rota Roselli, R.A.; Vernengo, G.; Altomare, C.; Brizzolara, S.; Bonfiglio, L.; Guercio, R. Ensuring numerical stability of wave propagation by tuning model parameters using genetic algorithms and response surface methods. Environ. Model. Softw. 2018, 103, 62–73. [Google Scholar] [CrossRef]
- English, A.; Domínguez, J.M.; Vacondio, R.; Crespo, A.J.C.; Stansby, P.K.; Lind, S.J.; Gomez-Gesteira, M. Correction for Dynamic Boundary Conditions. In Proceedings of the 2019 International SPHERIC Workshop, Exeter, UK, 25–27 June 2019; pp. 128–134. [Google Scholar]
- Liu, M.B.; Liu, G.R. Restoring particle consistency in smoothed particle hydrodynamics. Appl. Numer. Math. 2006, 56, 19–36. [Google Scholar] [CrossRef]
- Ren, B.; He, M.; Dong, P.; Wen, H. Nonlinear simulations of wave-induced motions of a freely floating body using WCSPH method. Appl. Ocean Res. 2015, 50, 1–12. [Google Scholar] [CrossRef]
- Canelas, R.B.; Domínguez, J.M.; Crespo, A.J.; Gómez-Gesteira, M.; Ferreira, R.M. A Smooth Particle Hydrodynamics discretization for the modelling of free surface flows and rigid body dynamics. Int. J. Numer. Methods Fluids 2015, 78, 581–593. [Google Scholar] [CrossRef]
- Brito, M.; Canelas, R.B.; García-Feal, O.; Domínguez, J.M.; Crespo, A.J.; Ferreira, R.M.; Neves, M.G.; Teixeira, L. A numerical tool for modelling oscillating wave surge converter with nonlinear mechanical constraints. Renew. Energy 2020, 146, 2024–2043. [Google Scholar] [CrossRef]
- Cargo, C.J.; Plummer, A.R.; Hillis, A.J.; Schlotter, M. Determination of optimal parameters for a hydraulic power take-off unit of a wave energy converter in regular waves. Proc. Inst. Mech. Eng. Part A J. Power Energy 2012, 226, 98–111. [Google Scholar] [CrossRef]
- Retes, M.P.; Giorgi, G.; Ringwood, J.V. A Review of Non-Linear Approaches for Wave Energy Converter Modelling. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015; pp. 08C1-3-1–08C1-3-10. [Google Scholar]
- Morison, J.R.; O’Brien, M.P.; Johnson, J.W.; Schaaf, S. Experimental Studies of Forces on Piles. Petroleum Trans. AIME 1950, 189, 149–157. [Google Scholar] [CrossRef] [Green Version]
- Kaneko, S.; Nakamura, T.; Inada, F.; Kato, M.; Ishihara, K.; Nishihara, T. (Eds.) Vibrations in Fluid-Structure Interaction Systems. In Flow-induced Vibrations, 2nd ed.; Academic Press: Cambridge, MA, USA, 2014; Chapter 8; pp. 359–401. [Google Scholar] [CrossRef]
- Bonfiglio, L. A hybrid RANSE—Strip theory method for prediction of ship motions. In Proceedings of the 3rd International Conference on Maritime Technology and Engineering (MARTECH 2016), Lisbon, Portugal, 4–6 July 2016. [Google Scholar]
- Palm, J.; Eskilsson, C.; Bergdahl, L.; Bensow, R.E. Assessment of scale effects, viscous forces and induced drag on a point-absorbing wave energy converter by CFD simulations. J. Mar. Sci. Eng. 2018, 6, 124. [Google Scholar] [CrossRef] [Green Version]
- Giorgi, G.; Penalba, M.; Ringwood, J.V. Nonlinear Hydrodynamic Models for Heaving Buoy Wave Energy Converters. In Proceedings of the 3rd Asian Wave and Tidal Energy Conference, Singapore, 24–28 October 2016. [Google Scholar]
- Munson, B.R.; Young, D.F.; Okiishi, T.H.; Huebsch, W.W. Fundamentals of Fluid Dynamics; Fowley, D., Ed.; Wiley: Hoboken, NJ, USA, 2009; pp. 93–146. [Google Scholar]
- Zang, Z.; Zhang, Q.; Qi, Y.; Fu, X. Hydrodynamic responses and efficiency analyses of a heaving-buoy wave energy converter with PTO damping in regular and irregular waves. Renew. Energy 2018, 116, 527–542. [Google Scholar] [CrossRef]
- Jin, S.; Patton, R.J.; Guo, B. Enhancement of wave energy absorption efficiency via geometry and power take-off damping tuning. Energy 2019, 169, 819–832. [Google Scholar] [CrossRef]
- Balitsky, P.; Quartier, N.; Fernandez, G.V.; Stratigaki, V.; Troch, P. Analyzing the Near-Field Effects and the Power Production of an Array of Heaving Cylindrical WECS and OSWECs Using a Coupled Hydrodynamic-PTO Model. Energies 2018, 11, 3489. [Google Scholar] [CrossRef] [Green Version]
- Colagrossi, A.; Landrini, M. Numerical simulation of interfacial flows by smoothed particle hydrodynamics. J. Comput. Phys. 2003, 191, 448–475. [Google Scholar] [CrossRef]
- Guo, B.; Patton, R.; Jin, S.; Gilbert, J.; Parsons, D. Nonlinear modeling and verification of a heaving point absorber for wave energy conversion. IEEE Trans. Sustain. Energy 2018, 9, 453–461. [Google Scholar] [CrossRef]
- Tao, L.; Thiagarajan, K. Low KC flow regimes of oscillating sharp edges I. Vortex shedding observation. Appl. Ocean Res. 2003, 25, 21–35. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Devolder, B.; Kortenhaus, A.; Troch, P. Feasibility study of applying SPH in a coupled simulation tool for wave energy converter arrays. In Proceedings of the 12th European Wave and Tidal Energy Conference (EWTEC2017), Cork, Ireland, 27 August–1 September 2017; pp. 739-1–739-10. [Google Scholar]
- Rafiee, A.; Fiévez, J. Numerical Prediction of Extreme Loads on the CETO Wave Energy Converter. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Balitsky, P.; Fernandez, G.V.; Stratigaki, V.; Troch, P. Assessment of the power output of a two-array clustered WEC farm using a bem solver coupling and a wave-propagation model. Energies 2018, 11, 2907. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spherical WEC | Cylinder1 | Cylinder2 | |
|---|---|---|---|
| T [s] | 9 | 1.5 | 1.2 |
| a [m] | 1.5 | 0.045 | 0.1 |
| [-] | 0.78 | 1.65 | 1.50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quartier, N.; Ropero-Giralda, P.; M. Domínguez, J.; Stratigaki, V.; Troch, P. Influence of the Drag Force on the Average Absorbed Power of Heaving Wave Energy Converters Using Smoothed Particle Hydrodynamics. Water 2021, 13, 384. https://doi.org/10.3390/w13030384
Quartier N, Ropero-Giralda P, M. Domínguez J, Stratigaki V, Troch P. Influence of the Drag Force on the Average Absorbed Power of Heaving Wave Energy Converters Using Smoothed Particle Hydrodynamics. Water. 2021; 13(3):384. https://doi.org/10.3390/w13030384
Chicago/Turabian StyleQuartier, Nicolas, Pablo Ropero-Giralda, José M. Domínguez, Vasiliki Stratigaki, and Peter Troch. 2021. "Influence of the Drag Force on the Average Absorbed Power of Heaving Wave Energy Converters Using Smoothed Particle Hydrodynamics" Water 13, no. 3: 384. https://doi.org/10.3390/w13030384
APA StyleQuartier, N., Ropero-Giralda, P., M. Domínguez, J., Stratigaki, V., & Troch, P. (2021). Influence of the Drag Force on the Average Absorbed Power of Heaving Wave Energy Converters Using Smoothed Particle Hydrodynamics. Water, 13(3), 384. https://doi.org/10.3390/w13030384