
An Anti-Clustering Model for Stability Enhancement of a 3D Moving Particle Semi-Implicit Method and Two-Phase Coupling between MPS and Euler Grids

Abstract
:1. Introduction
2. Standard MPS Method and Stabilization Methods Proposed Previously
2.1. Governing Equation
2.2. Kernel Function and Particle Interaction Models
2.3. Several Methods for Stability Enhancement Proposed Previously
3. The 3D Extending of the Proposed Stability Enhancement Methods and an Anti-Clustering Model
3.1. 3D Higher-Order Laplacian Model for PPE
3.2. 3D Higher-Order Source Term for PPE
3.3. 3D Correction Matrix for the Pressure Gradient Model
3.4. B-Spline Kernel Function
3.5. Anti-Clustering Model for the MPS Method
4. Results and Discussions
4.1. Simulation of a Swirling 2D Square Patch of Fluid
4.1.1. Comparison of Selected Stability Enhancement Methods in the 2D Case
- (1)
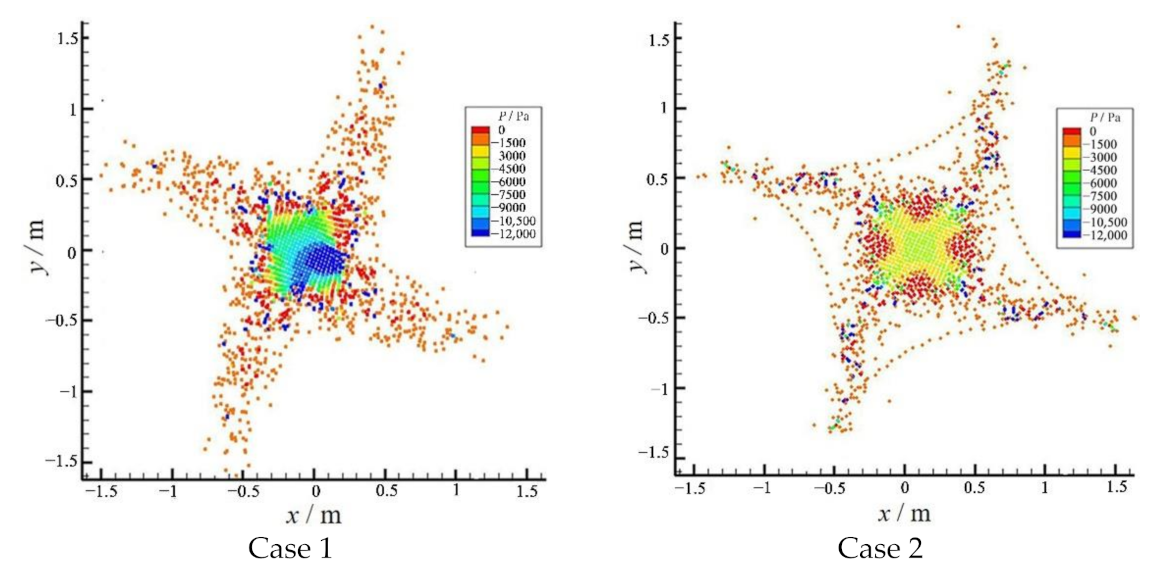
- For Case 1 and Case 2, although the stability enhancement methods are adopted the same as that by Khayyer and Gotoh [15], no stable deforming pattern as shown in Reference [9] is observed in the present cases. The reason may lie in the coarse initial particle spacing (0.025 m, while 0.002 m is adopted in Reference [9]) for the present cases.
- (2)
- For Case 4 and Case 5, the anti-clustering model is adopted on the basis of Case 1 and Case 2, respectively. The results show an impressive improvement of the stable deforming pattern, especially for Case 5. Note that the only difference between Case 4 and Case 5 is the kernel function. For the present cases, adopting the kernel function in Equation (3) shows better effects than adopting the kernel function in Equation (16).
- (3)
- The results of the four cases preliminarily validate the effects of the anti-clustering model proposed in the present investigation on stability.
- (1)
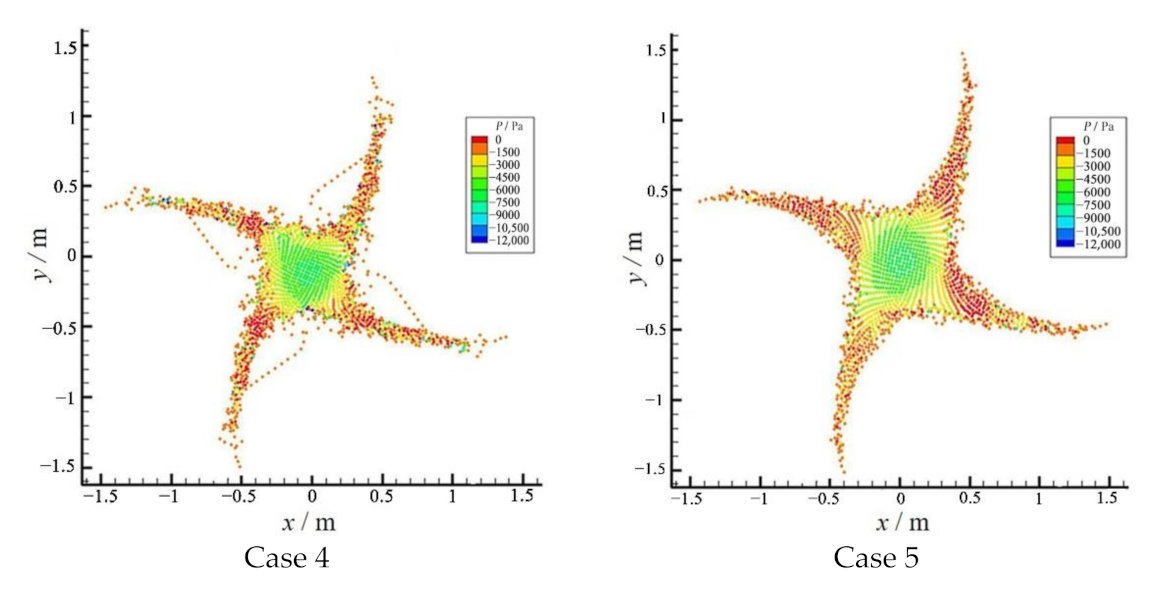
- Pressure oscillations are observed for Case 1 and Case 2, especially after t = 0.15 s, while for Case 4 and Case 5, a relatively smooth pressure change in the whole computation process is observed, indicating the anti-clustering model played a key role in the stability of the simulating process.
- (2)
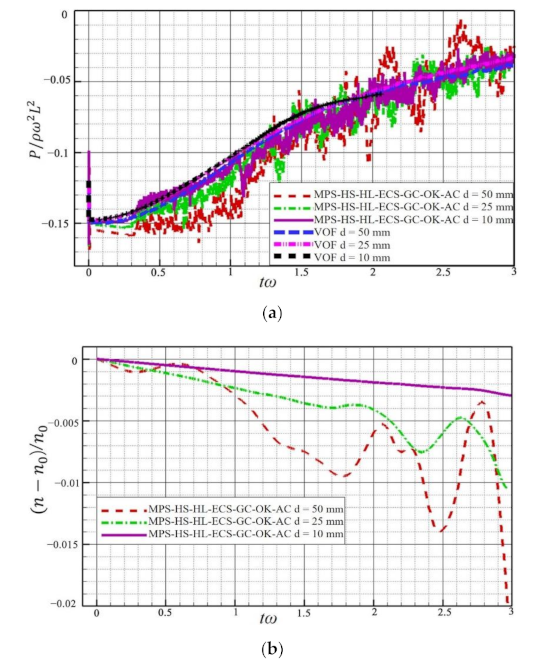
- The pressure change patterns observed for the four cases are also in accordance with the change patterns in Figure 2b, in which the change in particle number density vary smoothly around zero for Case 4 and Case 5 while rapidly deviate from zero after 0.2 s for Case 1 and Case 2.
- (3)
- Comparing the pressure histories between that of the MPS cases and VOF, the results calculated by Case 4 and Case 5 are observed in relatively good agreement with that calculated by VOF generally, although small pressure oscillations are observed for Case 4 and Case 5, indicating no negative effects on accuracy for the presently proposed anti-clustering model.
4.1.2. The Effects of Particle Spacing on the Accuracy of the Proposed Stability Method
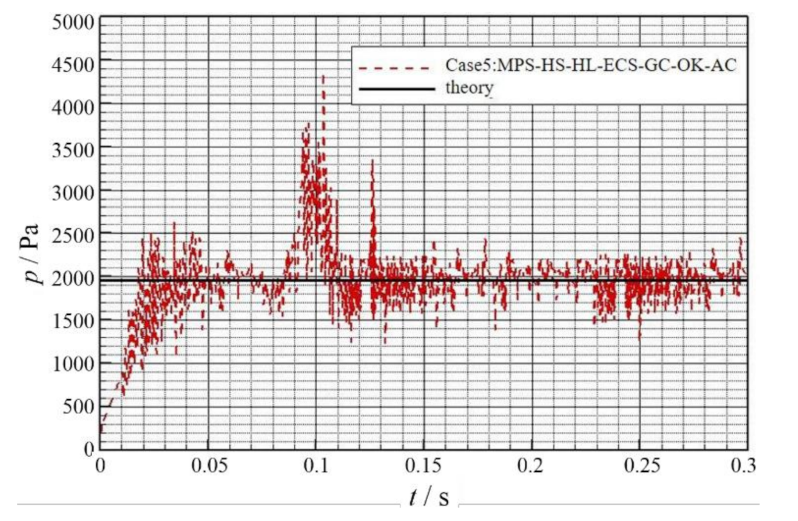
4.1.3. Calculation Verification of Hydrostatic Pressure
4.2. Comparison of Selected Stability Enhancement Methods in the 3D Case
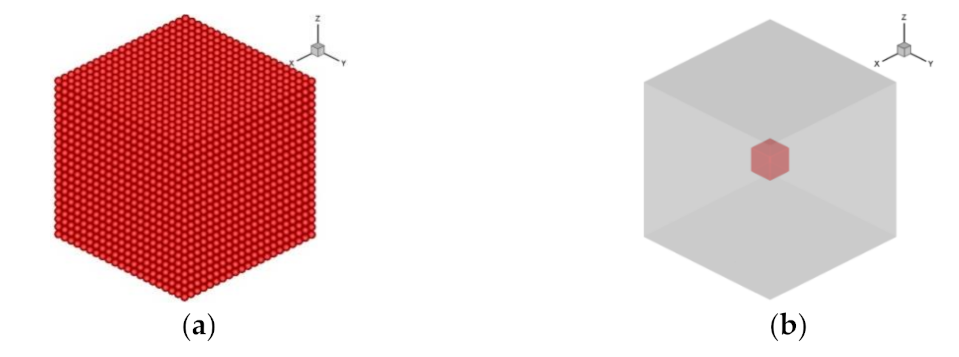
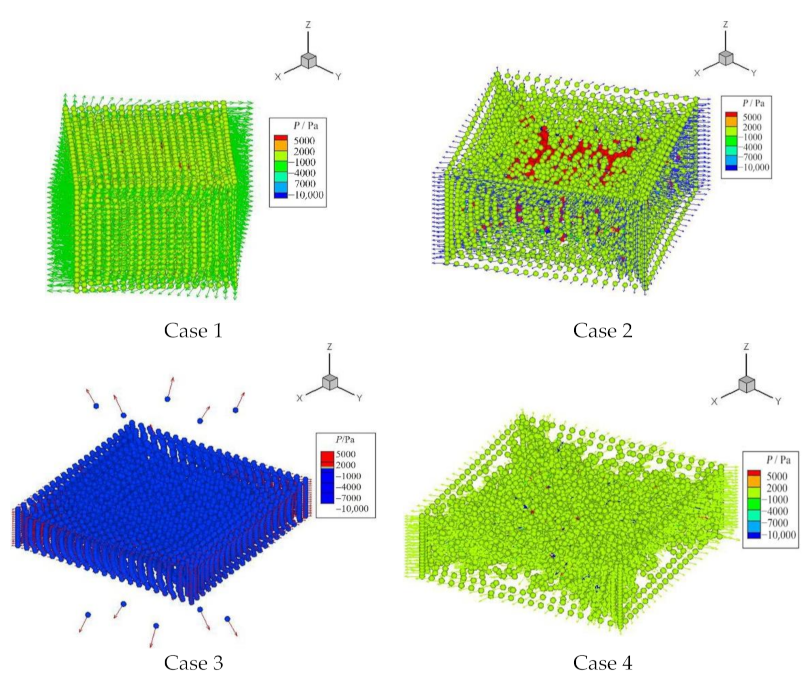
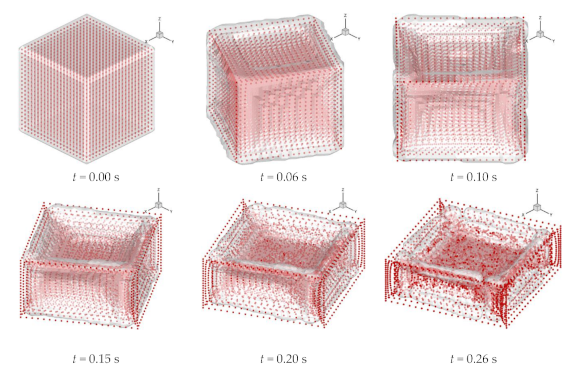
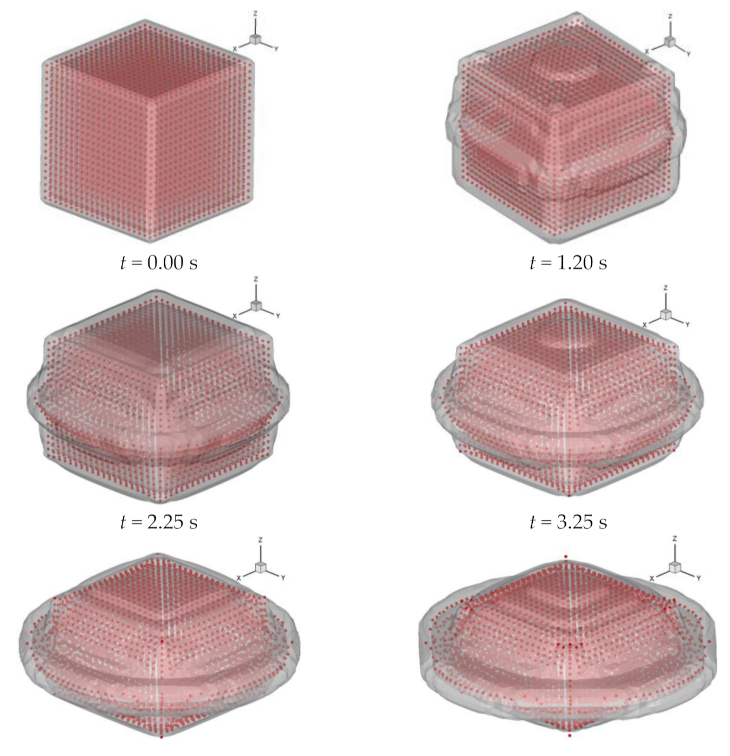
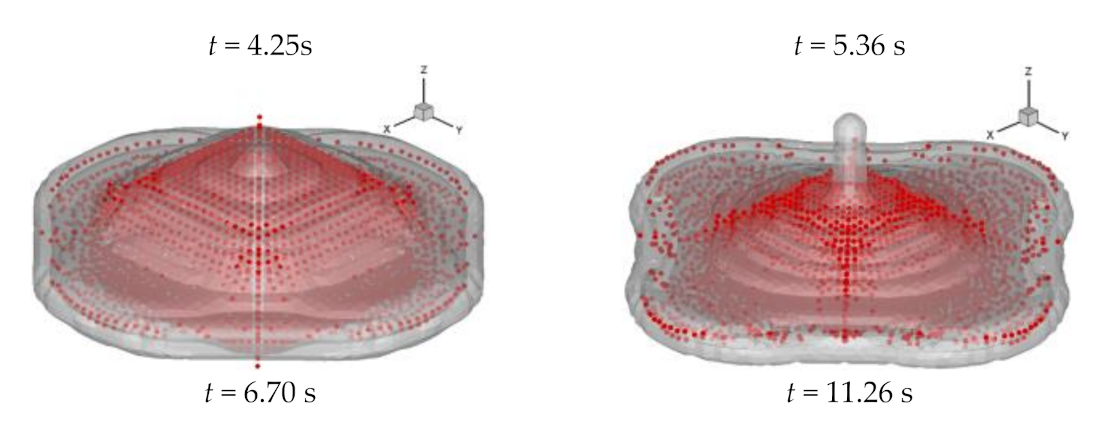
4.2.1. Simulation of a Swirling 3D Cubic Patch of Fluid
- (1)
- For Case 1 and Case 2, only the kernel function is different, while the results show that the stability of Case 2 is more positive than that of Case 1. So, unlike in the 2D case, the kernel function (16) is more suitable for the 3D case.
- (2)
- For Case 2 and Case 3, different PPE and pressure gradient models were adopted, while the results show a better stability but worse deforming evolution for Case 3, verifying the exactness of the high-order PPE, as discussed by Khayyer and Gotoh [9].
- (3)
- For Case 2 and Case 4, the difference lies in the anti-clustering model adopted by Case 4, while the results show only Case 4 obtain both a stable simulation and correct deforming evolution of cubic fluid significantly, verifying the positive effect of the anti-clustering model to stability in the 3D case.
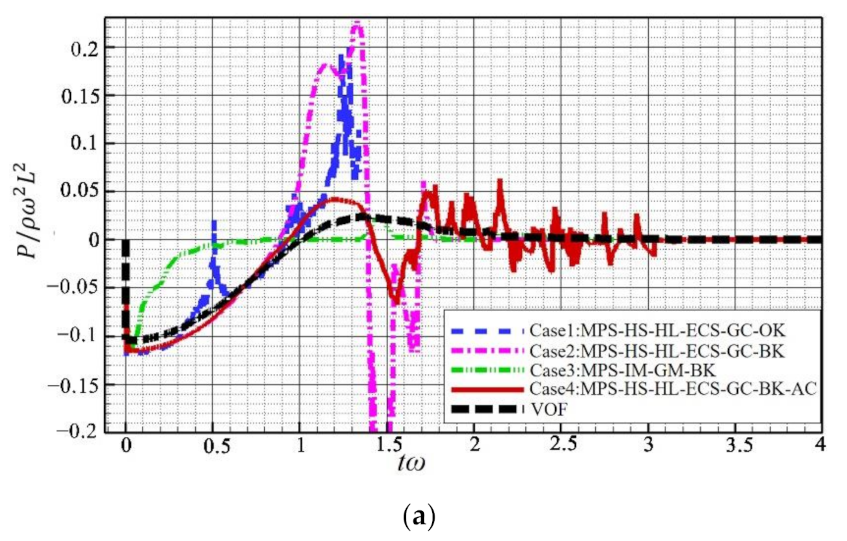
- (1)
- Pressure peaks are observed for Case 1 and Case 2 at dimensionless time 1.2, which corresponds to the time of divergence. For Case 3 and Case 4, a relatively smooth pressure change in the whole computation process is observed.
- (2)
- Comparing the pressure histories between that of the MPS cases and VOF, a relatively good agreement between that of Case 4 and VOF is observed generally, although a little over-predicted negative pressure at the beginning and a small pressure oscillation at dimensionless time 1.4~3.0 are also observed. Here, it is worthy to note that for MPS computation, all stability enhancement methods tend to reduce but not get rid of pressure fluctuation completely due to the fact that the calculated pressure values of the particles are in charge of correcting all errors produced in a previous explicit step. Hence, for violent particle movements, with the disorder of the particles’ position, especially in the 3D case, pressure fluctuation is unavoidable. As observed for Case 4 at dimensionless time 1.4~3.0, it corresponds to the time zone of collapse of the upper and down free surfaces. Particles tend to be disordered at this time. Obviously, the anti-clustering model plays a positive effect on the stability for Case 4 as compared with that of Case 2, and therefore computation is going on for Case 4 while divergence occurs for Case 2.
- (3)
- Further comparing the pressure histories of Case 2 and Case 4 before the divergence time of Case 2, they are the same with each other, verifying the fact that the addition of an anti-clustering model proposed in the present investigation will not affect the accuracy of the MPS method but enhance the stability of the solution.
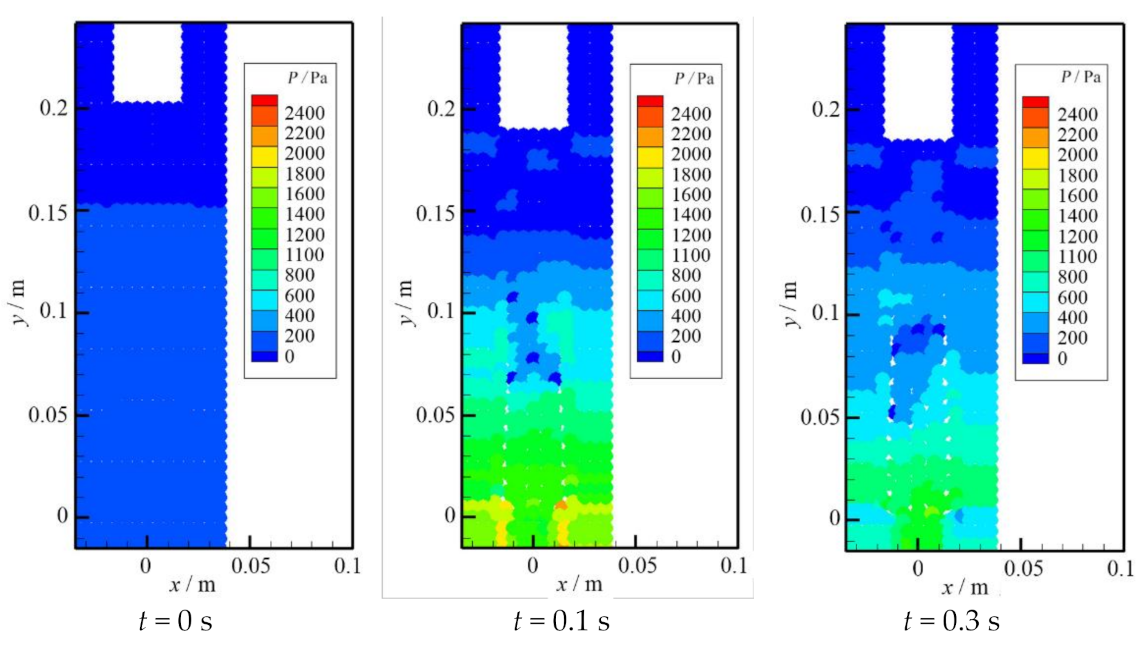
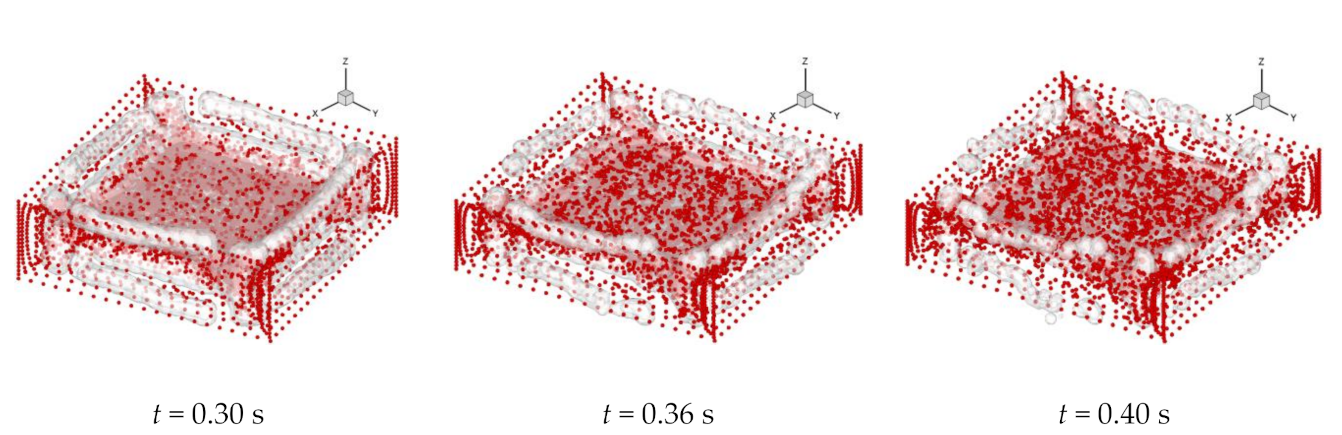
4.2.2. Simulation of 3D Fluid Extruding
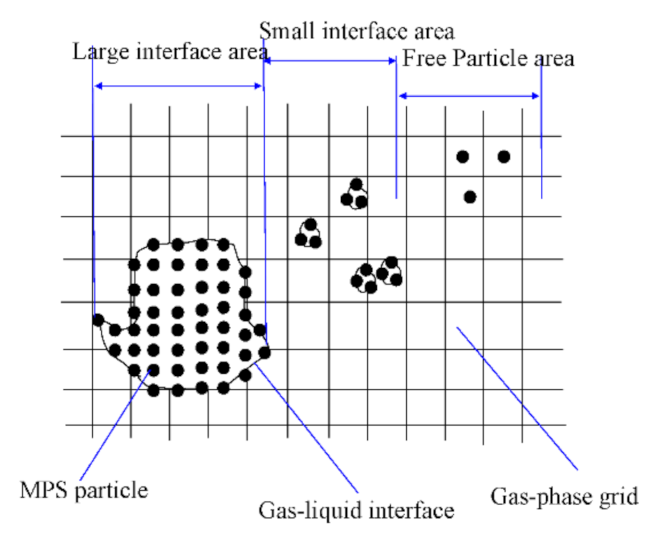
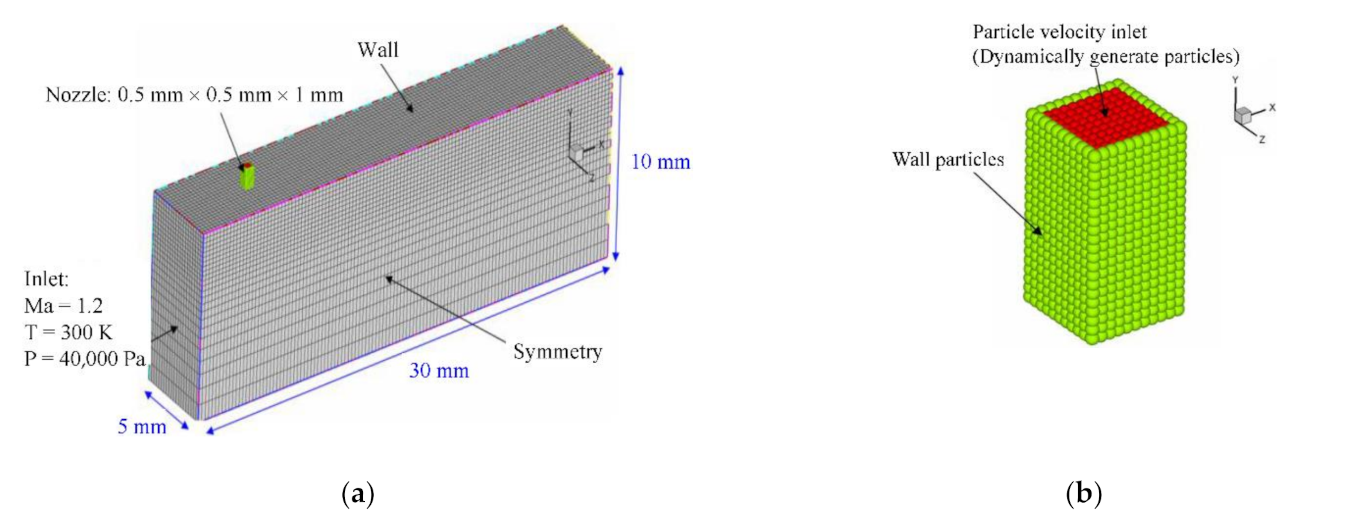
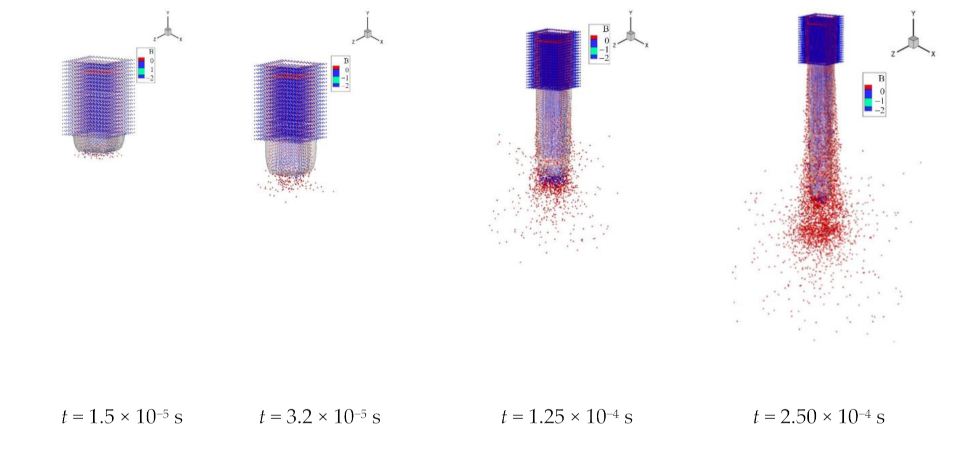
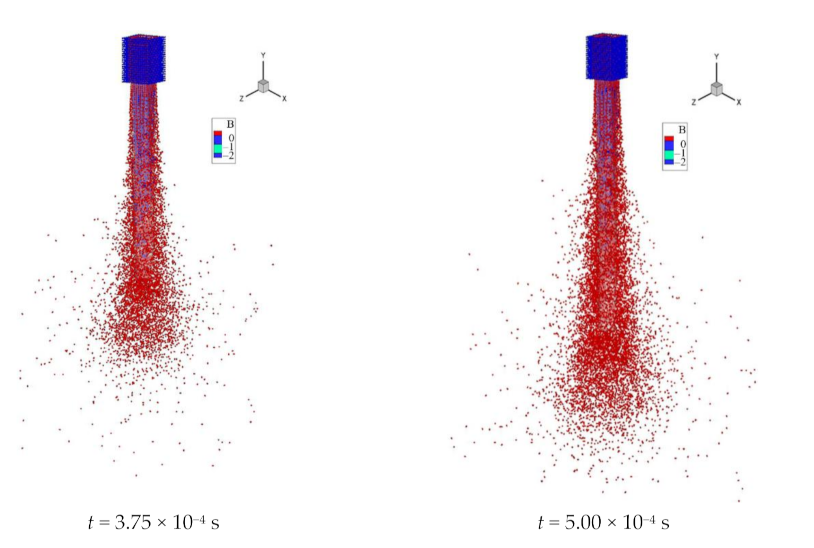
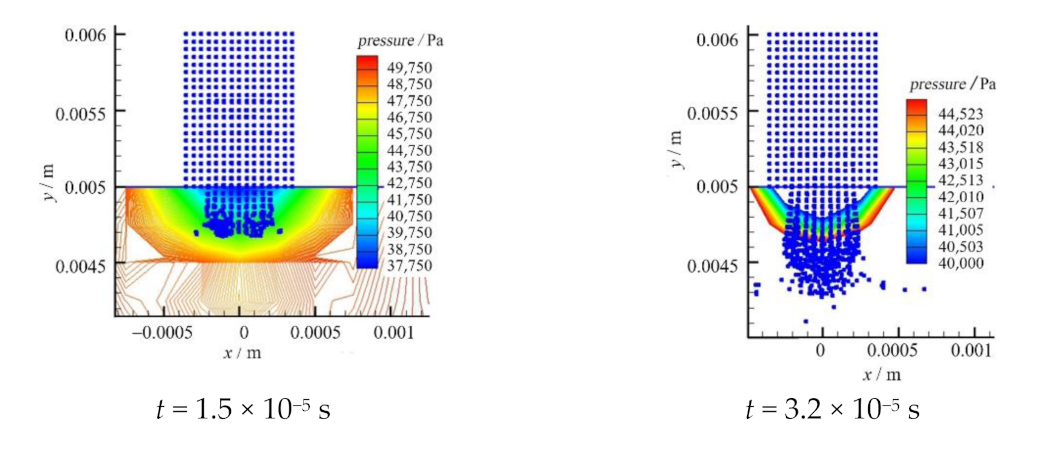
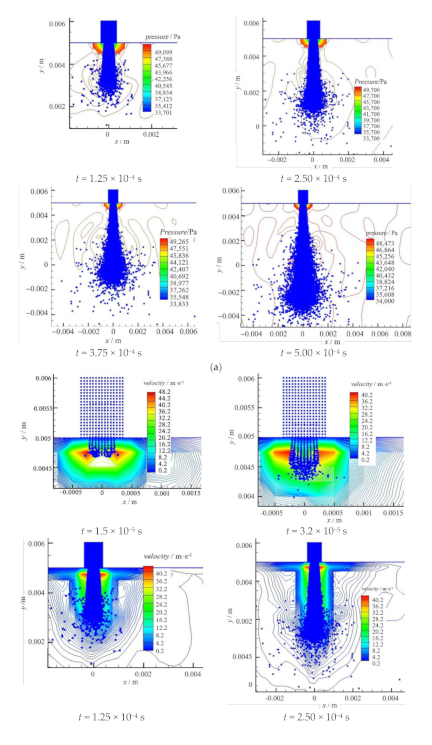
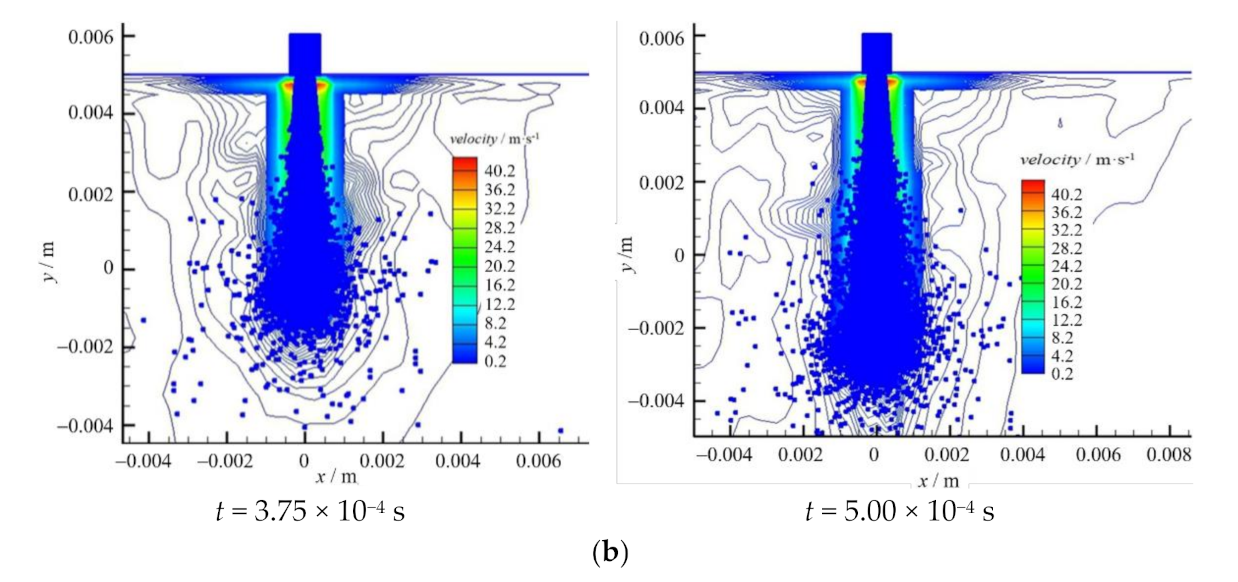
4.3. Two-Phase Coupling between the MPS Liquid Phase and the Euler-Grid Gas-Phase Compressible Flow
5. Conclusions
- (1)
- For the 3D case, only extending and applying previous stability enhancement method is still dissatisfactory, while good effects in accuracy and stability can be obtained by incorporating the anti-clustering model proposed in the present paper.
- (2)
- In view of accuracy, adopting a high-order Laplacian model and high-order source term in PPE are more accurate than that adopting a low-order operator.
- (3)
- No matter if in the 2D or 3D case, the anti-clustering model presented in this paper apparently plays a very positive role for further stability enhancement of MPS. The results show that the model can produce a tuned interparticle force to prevent particle clustering and introduce no additional viscosity effects in the flow of the normal state.
- (4)
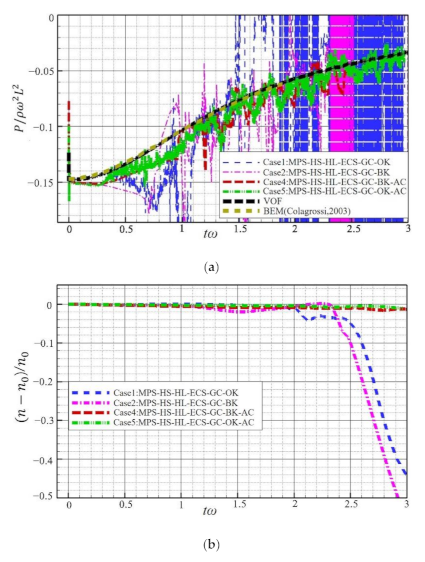
- Finer particle spacing is very important to obtain an accurate MPS simulation, although the anti-clustering model helps to stabilize the computation of cases with a coarser particle spacing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Koshizuka, S.; Tamako, H.; Oka, Y. A Particle Method for Incompressible Viscous Flow withFluid Fragmentation. J. Comput. Fluid Dyn. 1995, 4, 29–46. [Google Scholar]
- Duan, G.; Chen, B.; Zhang, X.; Wang, Y. A multiphase MPS solver for modeling multi-fluid interaction with free surface and its application in oil spill. Comput. Methods Appl. Mech. Eng. 2017, 320, 133–161. [Google Scholar] [CrossRef] [Green Version]
- Nohara, S.; Suenaga, H.; Nakamura, K. Large deformation simulations of geomaterials using moving particle semi-implicit method. J. Rock Mech. Geotech. Eng. 2018, 10, 1122–1132. [Google Scholar] [CrossRef]
- Jena, D.; Biswal, K.C. A numerical study of violent sloshing problems with modified MPS method. J. Hydrodyn. Ser. B 2017, 29, 659–667. [Google Scholar] [CrossRef]
- Foroushan, H.K.; Jakobsen, H.A. On the dynamics of fluid particle breakage induced by hydrodynamic instabilities: A review of modelling approaches. Chem. Eng. Sci. 2020, 219, 115575. [Google Scholar] [CrossRef]
- Ataie-Ashtiani, B.; Farhadi, L. A stable moving-particle semi-implicit method for free surface flows. Fluid Dyn. Res. 2006, 38, 241–256. [Google Scholar] [CrossRef]
- Pan, X.; Zhang, H. Study on kernel fimctions of moving particle semi implicit method. Ocean Eng. 2010, 28, 70–76. [Google Scholar]
- Chen, X.; Xi, G.; Sun, Z.-G. Improving stability of MPS method by a computational scheme based on conceptual particles. Comput. Methods Appl. Mech. Eng. 2014, 278, 254–271. [Google Scholar] [CrossRef]
- Ghasemi, V.A.; Firoozabadi, B.; Mahdinia, M. 2D numerical simulation of density currents using the SPH projection method. Eur. J. Mech. B/Fluids 2013, 38, 38–46. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. A multiphase compressible–incompressible particle method for water slamming. Int. J. Offshore Polar Eng. 2016, 26, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, M.; Masunaga, T. Stabilization and smoothing of pressure in MPS method by Quasi-Compressibility. J. Comput. Phys. 2010, 229, 4279–4290. [Google Scholar] [CrossRef]
- Kondo, M.; Koshizuka, S. Improvement of stability in moving particle semi-implicit method. Int. J. Numer. Methods Fluids 2010, 65, 638–654. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. A higher order Laplacian model for enhancement and stabilization of pressure calculation by the MPS method. Appl. Ocean Res. 2010, 32, 124–131. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. Modified Moving Particle Semi-implicit methods for the prediction of 2D wave impact pressure. Coast. Eng. 2009, 56, 419–440. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. Enhancement of stability and accuracy of the moving particle semi-implicit method. J. Comput. Phys. 2011, 230, 3093–3118. [Google Scholar] [CrossRef]
- Daneshvar, F.A.; Rakhshandehroo, G.R.; Talebbeydokhti, N. New modified gradient models for MPS method applied to free-surface flow simulations. Appl. Ocean Res. 2017, 66, 95–116. [Google Scholar] [CrossRef]
- Liu, X.; Morita, K.; Zhang, S. An advanced moving particle semi-implicit method for accurate and stable simulation of incompressible flows. Comput. Methods Appl. Mech. Eng. 2018, 339, 467–487. [Google Scholar] [CrossRef]
- Koshizuka, S.; Oka, Y. Moving-particle semi-implicit method for fragmentation of incompressible fluid cladding. Nucl. Sci. Eng. 1996, 123, 421–431. [Google Scholar] [CrossRef]
- Koshizuka, S.; Nobe, A.; Oka, Y. Numerical analyses of breaking waves using the Moving Particle Semi-implicit Method. Int. J. Numer. Meth. Fluids 1998, 26, 751–769. [Google Scholar] [CrossRef]
- Tsuruta, N.; Khayyer, A.; Gotoh, H. A short note on Dynamic Stabilization of Moving Particle Semi-implicit method. Comput. Fluids 2013, 82, 158–164. [Google Scholar] [CrossRef] [Green Version]
- Khayyer, A.; Gotoh, H.; Shimizu, Y.; Gotoh, K. On enhancement of energy conservation properties of projection-based particle methods. Eur. J. Mech. B/Fluids 2017, 66, 20–37. [Google Scholar] [CrossRef]
- Duan, G.; Chen, B.; Koshizuka, S.; Xiang, H. Stable multiphase moving particle semi-implicit method for incompressible interfacial flow. Comput. Methods Appl. Mech. Eng. 2017, 318, 636–666. [Google Scholar] [CrossRef] [Green Version]
- Jandaghian, M.; Krimi, A.; Zarrati, A.R.; Shakibaeinia, A. Enhanced weakly-compressible MPS method for violent free-surface flows: Role of particle regularization techniques. J. Comput. Phys. 2021, 434. [Google Scholar] [CrossRef]
- Jandaghian, M.; Shakibaeinia, A. An enhanced weakly-compressible MPS method for free-surface flows. Comput. Methods Appl. Mech. Eng. 2020, 360. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H.; Shimizu, Y. A projection-based particle method with optimized particle shifting for multiphase flows with large density ratios and discontinuous density fields. Comput. Fluids 2019, 179, 356–371. [Google Scholar] [CrossRef]
- Kondo, M. A physically consistent particle method for incompressible fluid flow calculation. Comput. Part. Mech. 2020, 8, 69–86. [Google Scholar] [CrossRef] [Green Version]
- Kazemi, E.; Nichols, A.; Tait, S.; Shao, S. SPH modelling of depth-limited turbulent open channel flows over rough boundaries. Int. J. Numer. Methods Fluids 2017, 83, 3–27. [Google Scholar] [CrossRef] [Green Version]
- Gabreil, E.; Tait, S.J.; Shao, S.; Nichols, A. SPHysics simulation of laboratory shallow free surface turbulent flows over a rough bed. J. Hydraul. Res. 2018, 56, 727–747. [Google Scholar] [CrossRef] [Green Version]
- Gong, K.; Shao, S.; Liu, H.; Lin, P.; Gui, Q. Cylindrical Smoothed Particle Hydrodynamics Simulations of Water Entry. J. Fluids Eng. 2019, 141. [Google Scholar] [CrossRef]
- Zheng, X.; Shao, S.; Khayyer, A.; Duan, W.; Ma, Q.; Liao, K. Corrected First-Order Derivative ISPH in Water Wave Simulations. Coast. Eng. J. 2018, 59, 1750010. [Google Scholar] [CrossRef]
- Price, D.J. Modelling discontinuities and Kelvin–Helmholtz instabilities in SPH. J. Comput. Phys. 2008, 227, 10040–10057. [Google Scholar] [CrossRef] [Green Version]
- Monaghan, J.J. Smoothed particle hydrodynamics. Ann. Rev. Astron. Astrophys. 1992, 30, 543–574. [Google Scholar] [CrossRef]
- Price, D.J. Smoothed particle hydrodynamics and magnetohydrodynamics. J. Comput. Phys. 2012, 231, 759–794. [Google Scholar] [CrossRef] [Green Version]
- Lin, K.-C.; Kennedy, P.J.; Jackson, T.A. Structures of water jets in a mach 1.94 supersonic crossflow. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 5–8 January 2004; p. 971. [Google Scholar]
- Zhang, S.; Morita, K.; Fukuda, K.; Shirakawa, N. An improved MPS method for numerical simulations of convective heat transfer problems. Int. J. Numer. Methods Fluids 2006, 51, 31–47. [Google Scholar] [CrossRef]
- Lo, E.Y.; Shao, S. Simulation of near-shore solitary wave mechanics by an incompressible SPH method. Appl. Ocean Res. 2002, 24, 275–286. [Google Scholar] [CrossRef]
- Fang, J.; Parriaux, A.; Rentschler, M.; Ancey, C. Improved SPH methods for simulating free surface flows of viscous fluids. Appl. Numer. Math. 2009, 59, 251–271. [Google Scholar] [CrossRef] [Green Version]
- Oger, G.; Doring, M.; Alessandrini, B.; Ferrant, P. An improved SPH method: Towards higher order convergence. J. Comput. Phys. 2007, 225, 1472–1492. [Google Scholar] [CrossRef]
- Colagrossi, A.; Landrini, M. Numerical simulation of interfacial flows by smoothed particle hydrodynamics. J. Comput. Phys. 2003, 191, 448–475. [Google Scholar] [CrossRef]
- Gilmanov, A.; Sotiropoulos, F. A hybrid Cartesian/immersed boundary method for simulating flows with 3D, geometrically complex, moving bodies. J. Comput. Phys. 2005, 207, 457–492. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Abbreviation | Equations Used in Modified MPS Methods | ||||
|---|---|---|---|---|---|---|
| Laplacian Operator in PPE | Source Term of PPE | Kernel Function | Anti-Clustering Model | |||
| 1 | MPS-HS-HL-ECS-GC-OK | (13) | (14) | (12) | (3) | × |
| 2 | MPS-HS-HL-ECS-GC-BK | (13) | (14) | (12) | (16) | × |
| 3 | MPS-IL-GM-BK | (6) | (7) | (8) | (16) | × |
| 4 | MPS-HS-HL-ECS-GC-BK-AC | (13) | (14) | (12) | (16) | (17)(18) |
| 5 | MPS-HS-HL-ECS-GC-OK-AC | (13) | (14) | (12) | (3) | (17)(18) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, M.; Huang, S.; Lian, G. An Anti-Clustering Model for Stability Enhancement of a 3D Moving Particle Semi-Implicit Method and Two-Phase Coupling between MPS and Euler Grids. Water 2021, 13, 887. https://doi.org/10.3390/w13070887
Feng M, Huang S, Lian G. An Anti-Clustering Model for Stability Enhancement of a 3D Moving Particle Semi-Implicit Method and Two-Phase Coupling between MPS and Euler Grids. Water. 2021; 13(7):887. https://doi.org/10.3390/w13070887
Chicago/Turabian StyleFeng, Meiyan, Shenghong Huang, and Guofu Lian. 2021. "An Anti-Clustering Model for Stability Enhancement of a 3D Moving Particle Semi-Implicit Method and Two-Phase Coupling between MPS and Euler Grids" Water 13, no. 7: 887. https://doi.org/10.3390/w13070887
APA StyleFeng, M., Huang, S., & Lian, G. (2021). An Anti-Clustering Model for Stability Enhancement of a 3D Moving Particle Semi-Implicit Method and Two-Phase Coupling between MPS and Euler Grids. Water, 13(7), 887. https://doi.org/10.3390/w13070887