
Relationship between Upstream Swimming Behaviors of Juvenile Grass Carp and Characteristic Hydraulic Conditions of a Vertical Slot Fishway


Abstract
:1. Introduction
2. Materials and Methods
2.1. Physical Model
2.1.1. Test Equipment
2.1.2. Test Fish
2.1.3. Test Method and Condition
2.2. Numerical Model
2.2.1. Simulation
2.2.2. Validation
2.3. Fish Trajectory Analyses
3. Results
3.1. Physical Versus Numerical Model Results
3.2. Percentage of Successful Movement
3.3. Upstream Movement Trajectories
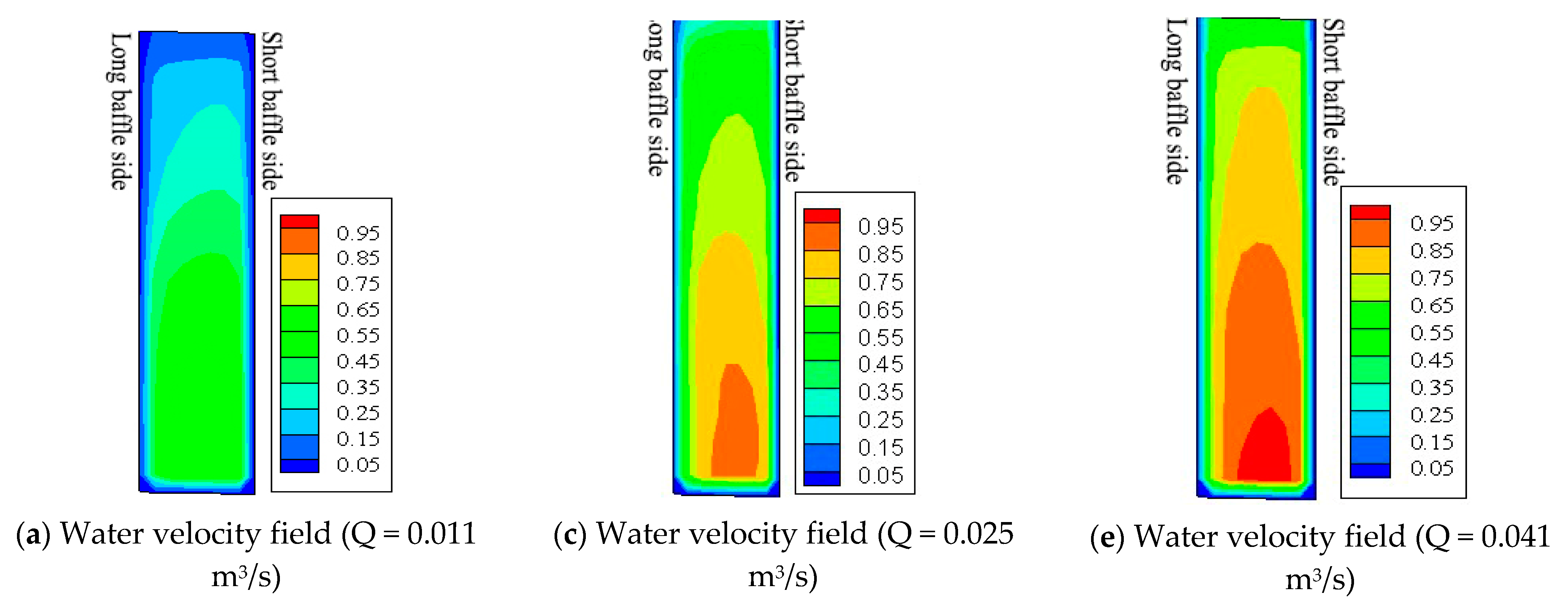
3.4. Hydraulic Variables in Fishway Pool
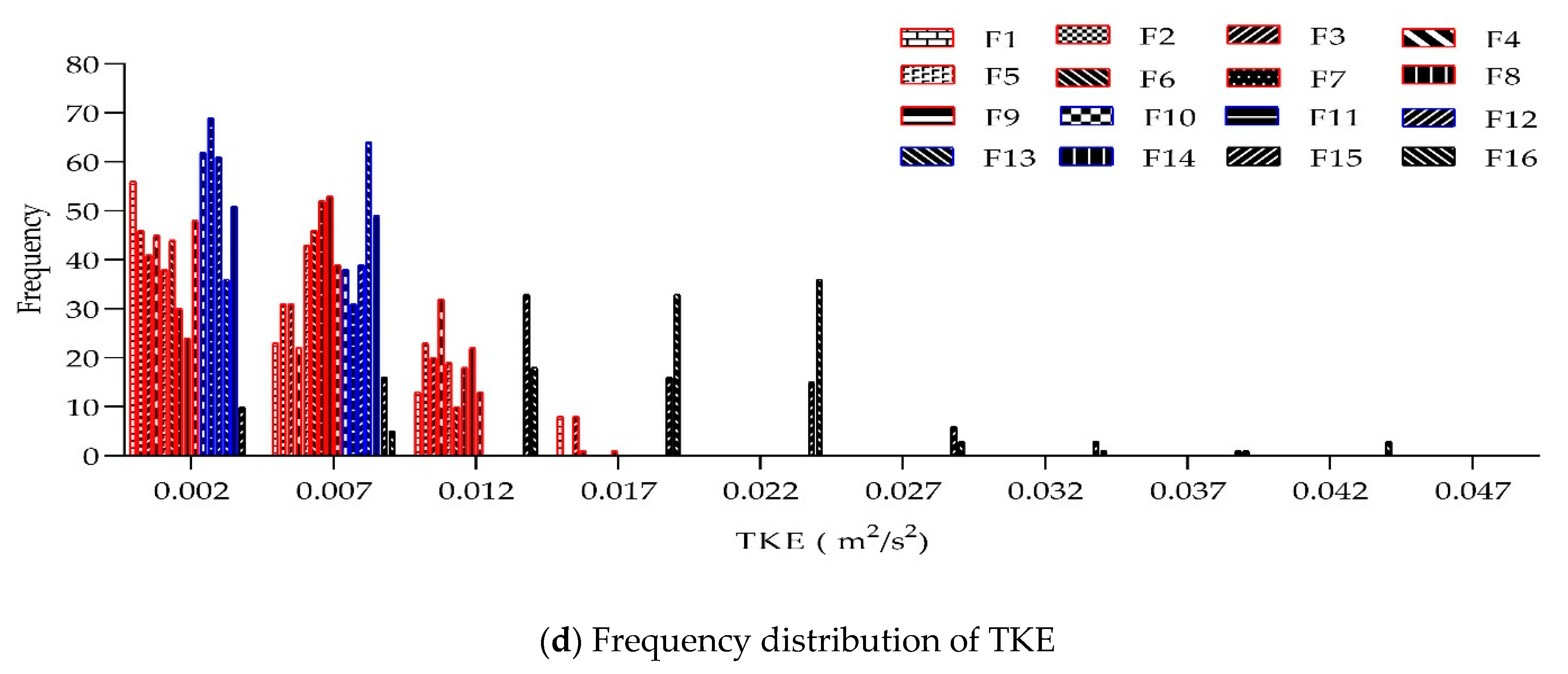
3.5. Hydraulic Variables in Vertical Slot
4. Discussion
4.1. Physical Versus Numerical Model Results
4.2. Influence of Hydraulic Structure on Percentage of Successful Movement
4.3. Upstream Movement Trajectories
4.4. Influence of Hydraulic Variables
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Newbold, L.R.; Shi, X.; Hou, Y.; Han, D.; Kemp, P.S. Swimming performance and behaviour of bighead carp (Hypophthalmichthys nobilis): Application to fish passage and exclusion criteria. Ecol. Eng. 2016, 95, 690–698. [Google Scholar] [CrossRef]
- Wu, X.; Rao, J.; He, B. The history of the Chinese freshwater fisheries. In Cultivation of the Chinese Freshwater Fishes; Science Press: Beijing, China, 1992; pp. 5–29. [Google Scholar]
- Li, G.; Sun, S.; Liu, H.; Zheng, T. Schizothorax prenanti swimming behavior in response to different flow patterns in vertical slot fishways with different slot positions. Sci. Total Environ. 2021, 754, 142142. [Google Scholar] [CrossRef]
- Mu, X.P.; Zhen, W.Y.; Li, X.; Cao, P.; Gong, L.; Xu, F.R. A study of the impact of different flow velocities and light colors at the entrance of a fish collection system on the upstream swimming behavior of juvenile grass carp. Water 2019, 11, 322. [Google Scholar] [CrossRef] [Green Version]
- Castro-Santos, T.; Haro, A. Fish Guidance and Passage at Barriers; Science Publishers: Enfield, UK, 2010. [Google Scholar]
- Castro-Santos, T. Modeling the effect of varying swim speeds on fish passage through velocity barriers. Trans. Am. Fish. Soc. 2006, 135, 1230–1237. [Google Scholar] [CrossRef]
- Plesinski, K.; Bylak, A.; Radecki-Pawlik, A.; Mikolajczyk, T.; Kukula, K. Possibilities of fish passage through the block ramp: Model-based estimation of permeability. Sci. Total Environ. 2018, 631–632, 1201–1211. [Google Scholar] [CrossRef]
- Mallen-Cooper, M.; Stuart, I. Optimising Denil fishways for passage of small and large fishes. Fish. Manag. Ecol. 2007, 14, 61–71. [Google Scholar] [CrossRef]
- Noonan, M.J.; Grant, J.W.; Jackson, C.D. A quantitative assessment of fish passage efficiency. Fish Fish. 2012, 13, 450–464. [Google Scholar] [CrossRef]
- Bunt, C.M.; Cooke, S.J.; McKinley, R.S. Assessment of the Dunnville fishway for passage of walleyes from Lake Erie to the Grand River, Ontario. J. Great Lakes Res. 2000, 26, 482–488. [Google Scholar] [CrossRef]
- Knaepkens, G.; Baekelandt, K.; Eens, M. Fish pass effectiveness for bullhead (Cottus gobio), perch (Perca fluviatilis) and roach (Rutilus rutilus) in a regulated lowland river. Ecol. Freshw. Fish 2006, 15, 20–29. [Google Scholar] [CrossRef]
- Coutant, C.C.; Whitney, R.R. Fish behavior in relation to passage through hydropower turbines: A review. Trans. Am. Fish. Soc. 2000, 129, 351–380. [Google Scholar] [CrossRef]
- Lacey, R.J.; Neary, V.S.; Liao, J.C.; Enders, E.C.; Tritico, H.M. The IPOS framework: Linking fish swimming performance in altered flows from laboratory experiments to rivers. River Res. Appl. 2012, 28, 429–443. [Google Scholar] [CrossRef]
- Nestler, J.; Goodwin, R.; Smith, D.; Anderson, J.; Li, S. Optimum fish passage and guidance designs are based in the hydrogeomorphology of natural rivers. River Res. Appl. 2008, 24, 148–168. [Google Scholar] [CrossRef]
- Rodríguez, T.T.; Agudo, J.P.; Mosquera, L.P.; González, E.P. Evaluating vertical-slot fishway designs in terms of fish swimming capabilities. Ecol. Eng. 2006, 27, 37–48. [Google Scholar] [CrossRef]
- Silva, A.T.; Katopodis, C.; Santos, J.M.; Ferreira, M.T.; Pinheiro, A.N. Cyprinid swimming behaviour in response to turbulent flow. Ecol. Eng. 2012, 44, 314–328. [Google Scholar] [CrossRef] [Green Version]
- Liao, J.C.; Beal, D.N.; Lauder, G.V.; Triantafyllou, M.S. Fish exploiting vortices decrease muscle activity. Science 2003, 302, 1566–1569. [Google Scholar] [CrossRef]
- Enders, E.C.; Boisclair, D.; Roy, A.G. The effect of turbulence on the cost of swimming for juvenile Atlantic salmon (Salmo salar). Can. J. Fish. Aquat. Sci. 2003, 60, 1149–1160. [Google Scholar] [CrossRef]
- Cotel, A.J.; Webb, P.W.; Tritico, H. Do brown trout choose locations with reduced turbulence? Trans. Am. Fish. Soc. 2006, 135, 610–619. [Google Scholar] [CrossRef]
- Smith, D.L.; Brannon, E.L.; Shafii, B.; Odeh, M. Use of the average and fluctuating velocity components for estimation of volitional rainbow trout density. Trans. Am. Fish. Soc. 2006, 135, 431–441. [Google Scholar] [CrossRef]
- Sanz-Ronda, F.J.; Bravo-Córdoba, F.; Fuentes-Pérez, J.; Castro-Santos, T. Ascent ability of brown trout, Salmo trutta, and two Iberian cyprinids Iberian barbel, Luciobarbus bocagei, and northern straight-mouth nase, Pseudochondrostoma duriense in a vertical slot fishway. Knowl. Manag. Aquat. Ecosyst. 2016, 417, 10. [Google Scholar] [CrossRef] [Green Version]
- Katopodis, C. Developing a toolkit for fish passage, ecological flow management and fish habitat works. J. Hydraul. Res. 2005, 43, 451–467. [Google Scholar] [CrossRef]
- Ana, G.-V.; Javier, S.R.F.; Leandro, F.C.; Sergio, M.; Leunda, P.M. Potamodromous brown trout movements in the North of the Iberian Peninsula: Modelling past, present and future based on continuous fishway monitoring. Sci. Total Environ. 2018, 640–641, 1521. [Google Scholar]
- Chen, K.Q.; Tao, J.; Chang, Z.N.; Cao, X.H.; Ge, H.F. Difficulties and prospects of fishways in China: An overview of the construction status and operation practice since 2000. Ecol. Eng. 2014, 70, 82–91. [Google Scholar] [CrossRef]
- Mu, X.P.; Cao, P.; Gong, L.; Baiyin, B.; Li, X. A classification method for fish swimming behaviors under incremental water velocity for fishway hydraulic design. Water 2019, 11, 2131. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.T.; Chen, Q.W.; Huang, Y.P.; Liu, D.F.; Zhuang, P. Review on the methods to quantify fish’s ability to cross velocity barriers in fish passage. Acta Ecol. Sin. 2011, 31, 6967–6972. [Google Scholar]
- Hu, M.L. Characteristics of Water Level, Water Environment and Effects on Fish Communication and Migration in the Hukou Area of Poyang Lake; Nanchang University: Nanchang, China, 2009. [Google Scholar]
- He, G.; Fang, C.L.; Chen, W.J.; Zhou, H.M.; Fu, P.F.; Zhang, Y.P.; Wang, S. Community structure and variation of migration fishes in Pingfeng area of Poyang Lake channel. Hubei Agric. Sci. 2015, 54, 926–930. [Google Scholar]
- Dvwk, F. Fish Passes: Design, Dimensions, and Monitoring; Food and Agriculture Organization of the United Nations: Rome, Italy, 2002. [Google Scholar]
- Quaranta, E.; Katopodis, C.; Revelli, R.; Comoglio, C. Turbulent flow field comparison and related suitability for fish passage of a standard and a simplified low-gradient vertical slot fishway. River Res. Appl. 2017, 33, 1295–1305. [Google Scholar] [CrossRef]
- Fuentes-Pérez, J.; Sanz-Ronda, F.; Martínez de Azagra Paredes, A.; García-Vega, A. Modeling water-depth distribution in vertical-slot fishways under uniform and nonuniform scenarios. J. Hydraul. Eng. 2014, 140, 06014016. [Google Scholar] [CrossRef] [Green Version]
- Heimerl, S.; Hagmeyer, M.; Echteler, C. Numerical flow simulation of pool-type fishways: New ways with well-known tools. Hydrobiologia 2008, 609, 189–196. [Google Scholar] [CrossRef]
- Sanagiotto, D.G.; Rossi, J.B.; Lauffer, L.L.; Bravo, J.M. Three-dimensional numerical simulation of flow in vertical slot fishways: Validation of the model and characterization of the flow. Rev. Bras. De Recur. Hídricos Braz. J. Water Resour. 2019, 24. [Google Scholar] [CrossRef] [Green Version]
- Baki, A.B.M.; Zhu, D.Z.; Rajaratnam, N. Flow simulation in a rock-ramp fish pass. J. Hydraul. Eng. 2016, 142, 04016031. [Google Scholar] [CrossRef]
- Sanagiotto, D.G.; Rossi, J.B.; Bravo, J.M. Applications of computational fluid dynamics in the design and rehabilitation of nonstandard vertical slot fishways. Water 2019, 11, 199. [Google Scholar] [CrossRef] [Green Version]
- Tran, T.D.; Chorda, J.; Laurens, P.; Cassan, L. Modelling nature-like fishway flow around unsubmerged obstacles using a 2D shallow water model. Environ. Fluid Mech. 2016, 16, 413–428. [Google Scholar] [CrossRef] [Green Version]
- Calluaud, D.; Pineau, G.; Texier, A.; David, L. Modification of vertical slot fishway flow with a supplementary cylinder. J. Hydraul. Res. 2014, 52, 614–629. [Google Scholar] [CrossRef]
- Tan, J.; Gao, Z.; Dai, H.; Yang, Z.; Shi, X.T. Effects of turbulence and velocity on the movement behaviour of bighead carp (Hypophthalmichthys nobilis) in an experimental vertical slot fishway. Ecol. Eng. 2019, 127, 363–374. [Google Scholar] [CrossRef]
- Cea, L.; Pena, L.; Puertas, J.; Vázquez-Cendón, M.; Peña, E. Application of several depth-averaged turbulence models to simulate flow in vertical slot fishways. J. Hydraul. Eng. 2007, 133, 160–172. [Google Scholar] [CrossRef]
- Li, G.N.; Sun, S.K.; Zhang, C.; Liu, H.T.; Zheng, T.G. Evaluation of flow patterns in vertical slot fishways with different slot positions based on a comparison passage experiment for juvenile grass carp. Ecol. Eng. 2019, 133, 148–159. [Google Scholar] [CrossRef]
- Tarrade, L.; Texier, A.; David, L.; Larinier, M. Topologies and measurements of turbulent flow in vertical slot fishways. Hydrobiologia 2008, 609, 177. [Google Scholar] [CrossRef] [Green Version]
- Bombač, M.; Novak, G.; Rodič, P.; Četina, M. Numerical and physical model study of a vertical slot fishway. J. Hydrol. Hydromech. 2014, 62, 150–159. [Google Scholar] [CrossRef] [Green Version]
- Cornu, V.; Baran, P.; Damien, C.; David, L. Effects of various configurations of vertical slot fishways on fish behaviour in an experimental flume. In Proceedings of the 9th International Symposium on Ecohydraulics—ISE 2012, Vienne, Austria, 17 September 2012. [Google Scholar]
- Turnpenny, A.W.H.; O’Keeffe, N. Screening for Intake and Outfalls: A Best Practice Guide; Technical Report SC030231; Environment Agency: Bristol, UK, 2005. [Google Scholar]
- Katopodis, C.; Gervais, R. Fish Swimming Performance Database and Analyses; Canadian Canadian Science Advisory Secretariat (CSAS): Winnipeg, MB, Canada, 2016. [Google Scholar]
- Puertas, J.; Cea, L.; Bermúdez, M.; Pena, L.; Rodríguez, Á.; Rabuñal, J.R.; Aramburu, E. Computer application for the analysis and design of vertical slot fishways in accordance with the requirements of the target species. Ecol. Eng. 2012, 48, 51–60. [Google Scholar] [CrossRef]
- Hinch, S.G.; Rand, P.S.; Sciences, A. Optimal swimming speeds and forward-assisted propulsion: Energy-conserving behaviours of upriver-migrating adult salmon. Can. J. Fish. Aquat. Sci. 2000, 57, 2470–2478. [Google Scholar] [CrossRef]
- Silva, A.T.; Santos, J.M.; Ferreira, M.T.; Pinheiro, A.N.; Katopodis, C. Effects of water velocity and turbulence on the behaviour of Iberian barbel (Luciobarbus bocagei, Steindachner 1864) in an experimental pool—Type fishway. River Res. Appl. 2011, 27, 360–373. [Google Scholar] [CrossRef]
- Pavlov, D.; Lupandin, A.; Skorobogatov, M. The effects of flow turbulence on the behavior and distribution of fish. J. Ichthyol. 2000, 40, 232–261. [Google Scholar]
- Tan, J.; Gao, Z.; Dai, H.; Shi, X.T. The correlation analysis between hydraulic characteristics of vertical slot fishway and fish movement characteristics. J. Hydraul. Eng. 2017, 48, 924–932. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lead Angle | Q (m3/s) | Water Velocity at Vertical Slot (m/s) | Number of Test Fish | Number of Test Fish of Successful Movement | Percentage of Successful Movement |
|---|---|---|---|---|---|
| 30° | 0.011 | 0.678 | 15 | 10 | 67% |
| 0.025 | 0.891 | 20 | 7 | 35% | |
| 0.041 | 1.050 | 20 | 2 | 10% | |
| 45° | 0.011 | 0.581 | 15 | 13 | 87% |
| 0.025 | 0.840 | 15 | 11 | 73% | |
| 0.041 | 0.979 | 15 | 5 | 33% | |
| 60° | 0.011 | 0.544 | 15 | 12 | 80% |
| 0.025 | 0.779 | 15 | 8 | 53% | |
| 0.041 | 0.851 | 20 | 6 | 30% |
| Q (m3/s) | Water Velocity Range of Observation Zone (m/s) | Trajectory Range | Number of Successful Movement | Water Velocity Range of Trajectory Range (m/s) | TKE of Trajectory Range (m2/s2) |
|---|---|---|---|---|---|
| 0.011 | 0.05~0.50 | 1 | 8 | 0.10~0.40 | 0.002~0.006 |
| 2 | 5 | 0.05~0.10 | 0.004~0.012 | ||
| 0.025 | 0.05~0.77 | 1 | 11 | 0.05~0.61 | 0.002~0.008 |
| 0.041 | 0.10~0.90 | 1 | 5 | 0.10~0.64 | 0.010~0.030 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, P.; Mu, X.; Li, X.; Baiyin, B.; Wang, X.; Zhen, W. Relationship between Upstream Swimming Behaviors of Juvenile Grass Carp and Characteristic Hydraulic Conditions of a Vertical Slot Fishway. Water 2021, 13, 1299. https://doi.org/10.3390/w13091299
Cao P, Mu X, Li X, Baiyin B, Wang X, Zhen W. Relationship between Upstream Swimming Behaviors of Juvenile Grass Carp and Characteristic Hydraulic Conditions of a Vertical Slot Fishway. Water. 2021; 13(9):1299. https://doi.org/10.3390/w13091299
Chicago/Turabian StyleCao, Ping, Xiangpeng Mu, Xiang Li, Baoligao Baiyin, Xiuying Wang, and Wanyue Zhen. 2021. "Relationship between Upstream Swimming Behaviors of Juvenile Grass Carp and Characteristic Hydraulic Conditions of a Vertical Slot Fishway" Water 13, no. 9: 1299. https://doi.org/10.3390/w13091299
APA StyleCao, P., Mu, X., Li, X., Baiyin, B., Wang, X., & Zhen, W. (2021). Relationship between Upstream Swimming Behaviors of Juvenile Grass Carp and Characteristic Hydraulic Conditions of a Vertical Slot Fishway. Water, 13(9), 1299. https://doi.org/10.3390/w13091299