
Interactions of Solitary Wave with a Submerged Step: Experiments and Simulations


Abstract
:1. Introduction
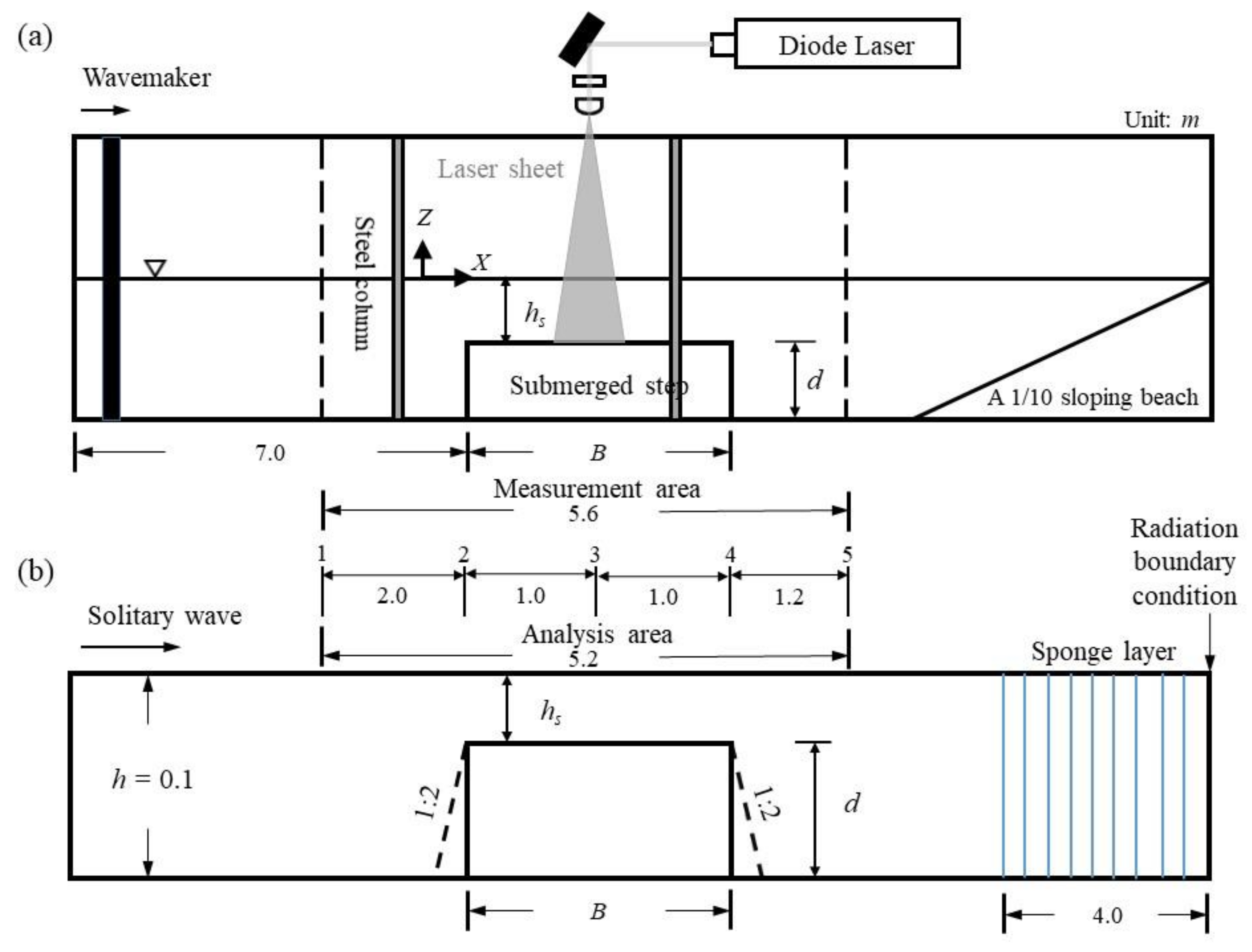
2. Experimental Setups and Image Processing
3. Numerical Models
3.1. Multi-Layer Finite-Difference Non-Hydrostatic Shallow-Water σ Model
3.2. One-Layer Finite-Element Non-Hydrostatic Shallow-Water Model
4. Data Processing
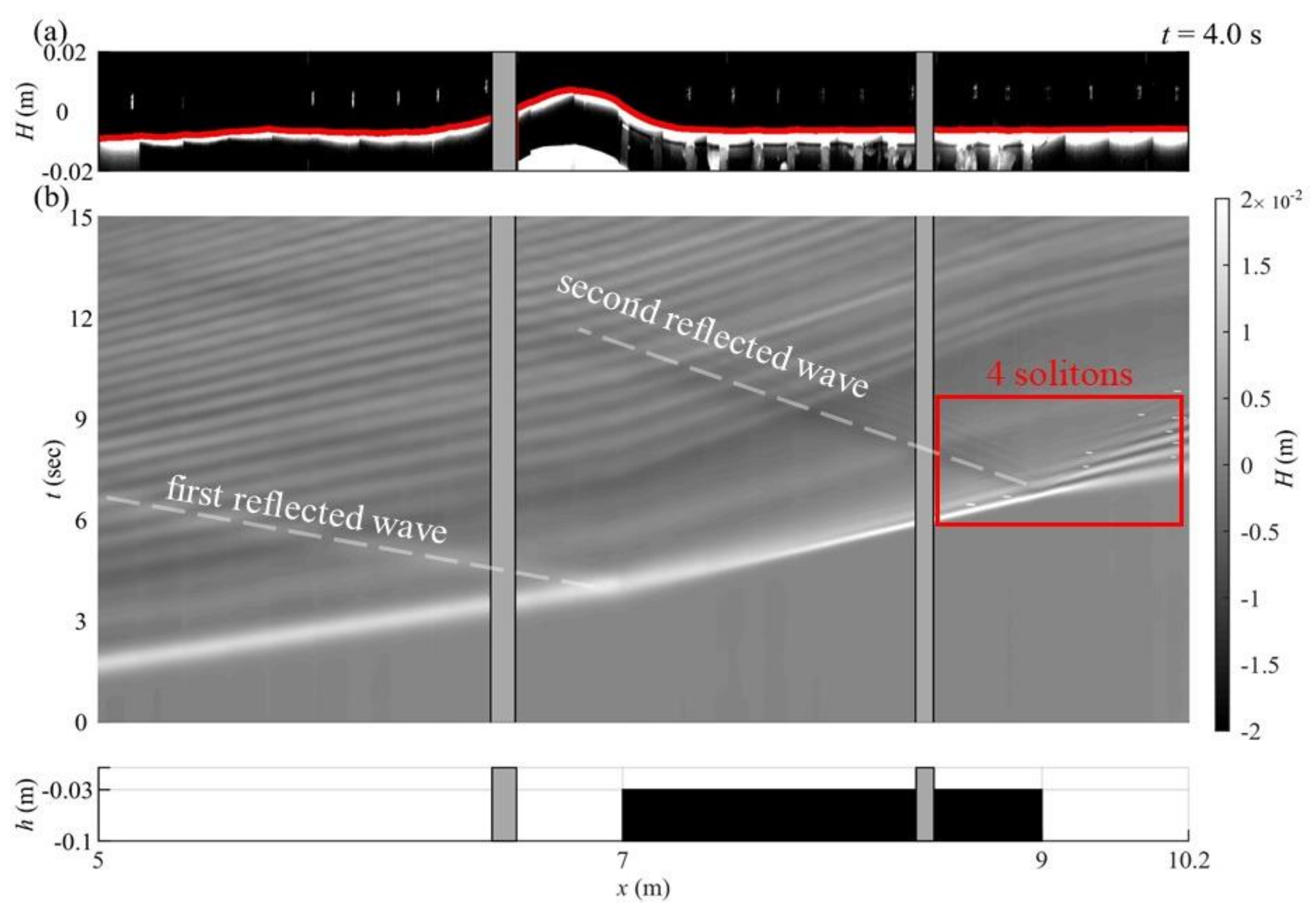
4.1. Reflected Waves
4.2. Transmitted Waves
5. Model Verification: Propagating Solitary Wave in a Constant Depth Channel
6. Results and Discussion
6.1. Effect of Submerged Step Height
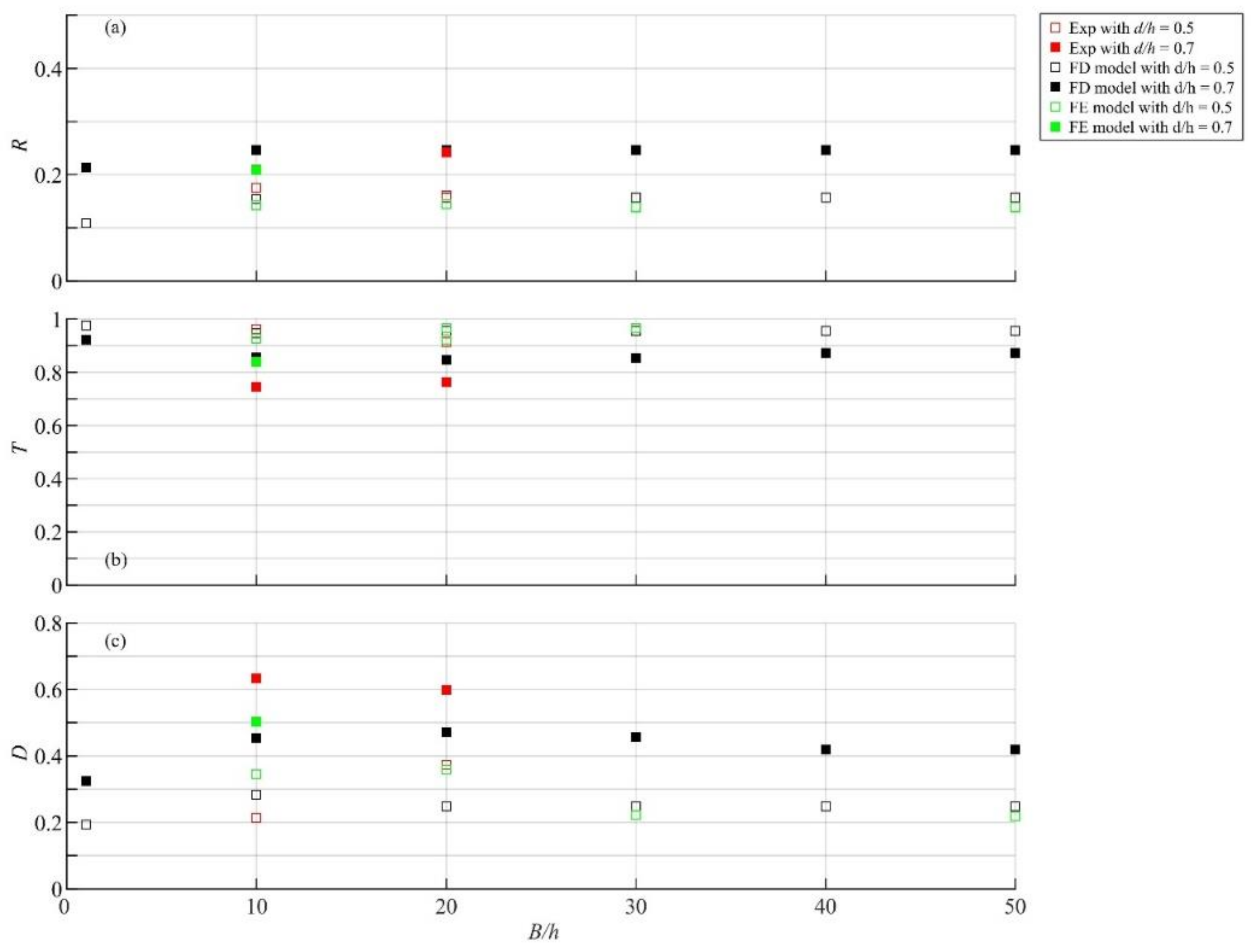
6.2. Effect of Submerged Step Width
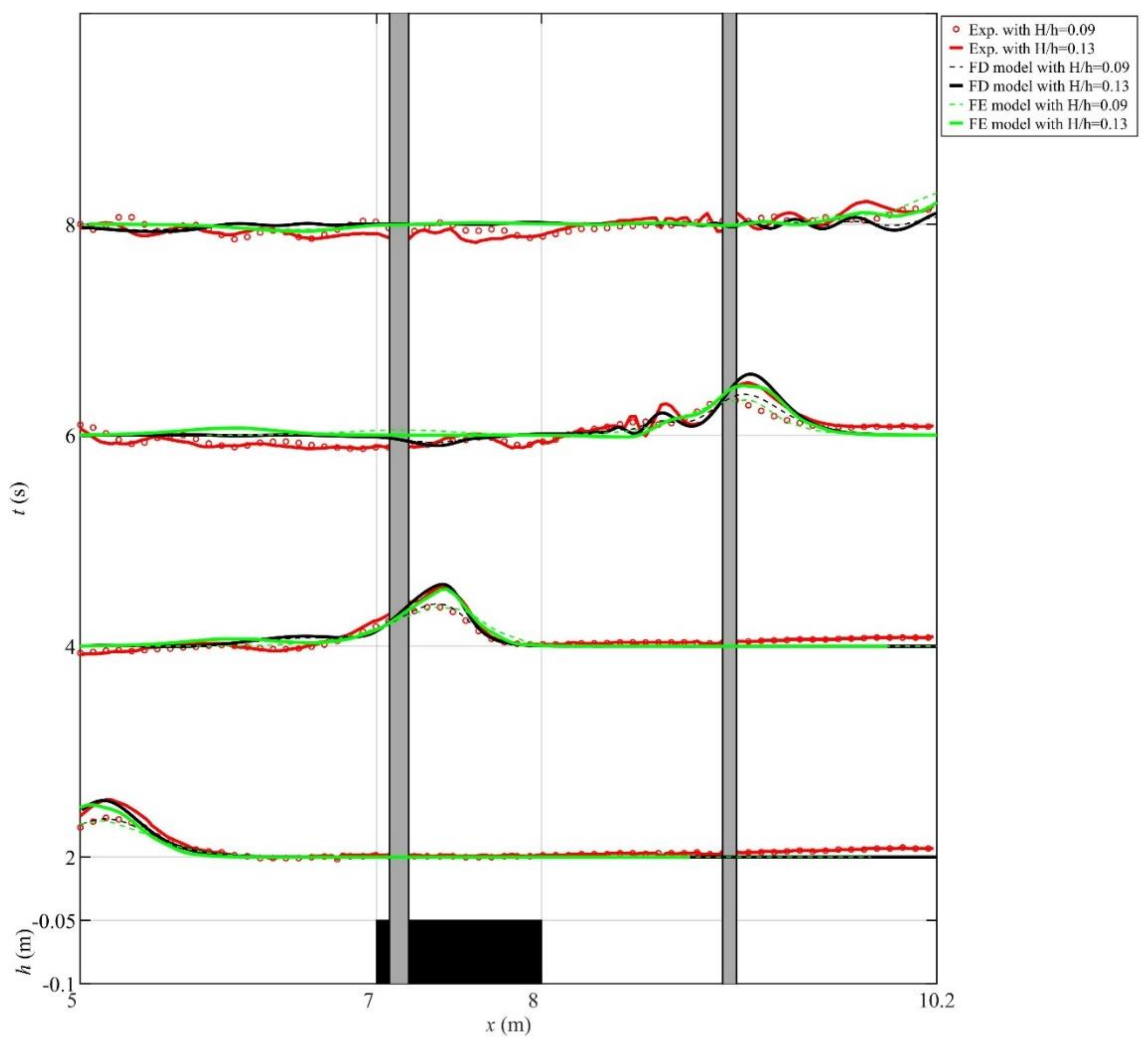
6.3. Effect of Solitary Wave Height
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mimura, N.; Yasuhara, K.; Kawagoe, S.; Yokoki, H.; Kazama, S. Damage from the great east Japan earthquake and tsunami—A quick report. Mitig. Adapt. Strateg. Glob. Chang. 2011, 16, 803–818. [Google Scholar] [CrossRef] [Green Version]
- Strusi’nska-Correia, A. Tsunami mitigation in Japan after 2011 Tohoku tsunami. Int. J. Disaster Risk Reduct. 2017, 22, 397–411. [Google Scholar] [CrossRef]
- Ware, M.; Long, J.W.; Fuentes, M.M.P.B. Using wave runup modeling to inform coastal species management: An example application for sea turtle nest relocation. Ocean Coast. Manag. 2019, 173, 17–25. [Google Scholar] [CrossRef]
- Wu, Y.T.; Hsiao, S.C. Propagation of solitary waves over a submerged slotted barrier. J. Mar. Sci. Eng. 2020, 8, 419. [Google Scholar] [CrossRef]
- Goring, D.G. Tsunamis—The Propation of Long Waves onto a Shelf; California Institute of Technology: Pasadena, CA, USA, 1978. [Google Scholar]
- Synolakis, C.E. The runup of solitary waves. J. Fluid Mech. 1987, 185, 523–545. [Google Scholar] [CrossRef]
- Yeh, H.; Liu, P.L.-F.; Briggs, M.; Synolakis, C.E. Propagation and amplification of tsunamis at coastal boundaries. Nature 1994, 372, 353–355. [Google Scholar] [CrossRef]
- Synolakis, C.E.; Bernard, E.N. Tsunami science before and beyond boxing day 2004. Philos. Trans. R. Soc. A 2006, 364, 2231–2265. [Google Scholar] [CrossRef]
- Synolakis, C.E.; Bernard, E.N.; Titov, V.V.; Kãnoglu, U.; González, F.I. Validation and verification of tsunami numerical models. Pure Appl. Geophys. 2008, 165, 2197–2228. [Google Scholar] [CrossRef]
- Macayel, D.R.; Abbot, D.S.; Sergienko, O.V. Iceberg-Capsize tsunamigenesis. Ann. Glaciol. 2011, 52, 51–56. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.L.F.; Synolakis, C.E.; Yeh, H. Report on the international workshop on long-wave run-up. J. Fluid Mech. 1991, 229, 675–688. [Google Scholar] [CrossRef]
- Russell, J.S. Report on Waves, Proceedings of the 14th Meeting of the British Association for the Advancement of Science, York, UK, September 1844; British Association for the Advancement of Science: London, UK, 1845; pp. 311–390. [Google Scholar]
- Mei, C.C.; Black, J.L. Scattering of surface waves by rectangular obstacles in waters of finite depth. J. Fluid Mech. 1969, 38, 499–511. [Google Scholar] [CrossRef]
- Vaziri, N.; Chern, M.J.; Borthwick, A.G. A pseudo spectral σ-transformation model of solitary waves in a tank with uneven bed. Comput. Fluids 2011, 49, 197–202. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Liu, H.; Gong, K.; Tan, S.K.; Shao, S. SPH modeling of solitary wave fissions over uneven tank bottoms. Coast. Eng. 2012, 60, 261–275. [Google Scholar] [CrossRef]
- Papoutsellis, C.; Charalampopoulos, A.; Athanassoulis, G. Implementation of a fully nonlinear Hamiltonian coupled-mode theory, and application to solitary wave problems over bathymetry. Eur. J. Mech. B Fluids 2018, 72, 199–224. [Google Scholar] [CrossRef] [Green Version]
- Losada, M.A.; Vidal, V.; Medina, R. Experimental study of the evolution of a solitary wave at an abrupt junction. J. Geophys. Res. 1989, 94, 14557. [Google Scholar] [CrossRef]
- Lin, P. A numerical study of solitary wave interaction with rectangular obstacles. Coast Eng. 2004, 51, 35–51. [Google Scholar] [CrossRef]
- Lu, J.; Yu, X. Numerical study of solitary wave fission over an underwater step. J. Hydrodynam. B 2008, 20, 398–402. [Google Scholar] [CrossRef]
- Ji, Q.; Dong, S.; Luo, X.; Guedes, S.C. Wave transformation over submerged breakwaters by the constrained interpolation profile method. Ocean Eng. 2017, 136, 294–303. [Google Scholar] [CrossRef]
- Wu, Y.T.; Hsiao, S.C. Propagation of solitary waves over double submerged barriers. Water 2017, 9, 917. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Dong, S. Interaction of solitary wave with submerged breakwater by smoothed particle hydrodynamics. Ocean Eng. 2020, 216, 108108. [Google Scholar] [CrossRef]
- Goring, D.G.; Raichlen, F.R. Propagation of long waves onto shelf. J. Waterw. Port Coast. Ocean Eng. 1992, 118, 43–61. [Google Scholar] [CrossRef]
- World Bank; United Nations. Nature Hazards, Unnatural Disasters: The Economics of Effective Prevention; World Bank: Washington, DC, USA, 2010. [Google Scholar]
- Ha, T.; Yoo, J.; Han, S.; Cho, Y.S. Numerical study on tsunami hazard mitigation using a submerged breakwater. Sci. World J. 2014, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Johnson, R.S. Some numerical solutions of variable-coefficient Korteweg-deVries equation (with application to solitary wave development on a shelf). J. Fluid Mech. 1972, 54, 81–91. [Google Scholar] [CrossRef]
- Miles, J.W. On internal solitary waves. Tellus 1979, 31, 456–462. [Google Scholar] [CrossRef] [Green Version]
- Kanoglu, U.; Synolakis, C.E. Long wave runup on piecewise linear topographies. J. Fluid Mech. 1998, 374, 1–28. [Google Scholar] [CrossRef]
- Nakuolima, O.; Zahibo, N.; Pelenovsky, E.; Taipove, T.; Kurkin, A. Solitary wave dynamics in shallow water over periodic topography. Chaos 2005, 15, 037107. [Google Scholar] [CrossRef]
- Pelinovsky, E.; Choi, B.H.; Talipova, T.; Woo, S.B.; Kim, D.C. Solitary wave transformation on the underwater step: Asymptotic theory and numerical experiments. Appl. Math. Comput. 2010, 217, 1704–1718. [Google Scholar] [CrossRef]
- Seabra-Santos, F.J.; Renouard, D.; Temperville, A. Numerical and experimental study of the transformation of a solitary wave over a shelf or isolated obstacle. J. Fluid Mech. 1987, 176, 117–134. [Google Scholar] [CrossRef]
- Li, F.C.; Ting, C.L. Separation of free and bound harmonics in waves. Coast. Eng. 2012, 67, 29–40. [Google Scholar] [CrossRef]
- Ting, C.L.; Chao, W.T.; Young, C.C. Experimental investigation of nonlinear regular wave transformation over a submerged step: Harmonic generation and wave height modulation. Coast. Eng. 2016, 117, 19–31. [Google Scholar] [CrossRef]
- Wu, Y.T.; Hsiao, S.C.; Huang, Z.C.; Hwang, K.S. Propagation of solitary over a bottom-mounted barrier. Coast. Eng. 2012, 62, 31–47. [Google Scholar] [CrossRef]
- Lin, C.; Chang, S.C.; Ho, T.C.; Chang, K.A. Laboratory observation of solitary wave propagation over a submerged rectangular dike. J. Eng. Mech. 2006, 132, 545–554. [Google Scholar] [CrossRef]
- Lin, C.; Ho, T.C.; Dey, S. Experimental study on the characteristics of steady horseshoe vortex system near the junction of rectangular cylinder and base plate. J. Eng. Mech. 2008, 134, 184–197. [Google Scholar] [CrossRef]
- Wu, Y.T.; Hsiao, S.C. Turbulence induced by a solitary wave propagating over a submerged object using particle image velocimetry. J. Coast. Res. 2013, 65, 416–421. [Google Scholar] [CrossRef]
- Wu, Y.T.; Hsiao, S.C. Propagation of solitary waves over a submerged permeable breakwater. Coast. Eng. 2013, 81, 1–18. [Google Scholar] [CrossRef]
- Liu, P.L.F.; Al-Banaa, K.; Cowen, E.A. Water wave induced boundary layer flows above a ripple bed. In PIV and Water Waves; World Scientific: Singapore, 2008; pp. 81–117. [Google Scholar]
- Athanassoulis, G.; Mavroeidis, C.; Koutsogiannakis, P.; Papoutsellis, C. A numerical study of the run-up and the force exerted on a vertical wall by a solitary wave propagating over two tandem trenches. J. Ocean Eng. Mar. Energy 2019, 5, 311–331. [Google Scholar] [CrossRef]
- Huang, C.J.; Chen, C.H.; Chang, H.H. Propagation of water waves over permeable rippled beds. Ocean Eng. 2011, 38, 579–591. [Google Scholar] [CrossRef]
- Shen, L.; Chan, E.S. Application of a combined ib-vof model to wave-structure interaction. Appl. Ocean Res. 2010, 32, 40–48. [Google Scholar] [CrossRef]
- Lin, P.; Liu, P.L.F. A numerical study of breaking waves in the surf zone. J. Fluid Mech. 1998, 359, 239–264. [Google Scholar] [CrossRef]
- Lin, P.; Liu, P.L.F. Turbulence transport, vorticity dynamics, and solute mixing under plunging breaking waves in surf zone. J. Geophys. Res. 1998, 103, 15677–15694. [Google Scholar] [CrossRef]
- Yeganeh-Bakhtiary, A.; Hajivalie, F.; Hashemi-Javan, A. Steady streaming and flow turbulence in front of vertical breakwater with wave overtopping. Appl. Ocean Res. 2010, 32, 91–102. [Google Scholar] [CrossRef]
- Liang, S.J.; Young, C.C.; Dai, C.; Wu, N.J.; Hsu, T.W. Simulation of ocean circulation of Dongsha water using non-hydrostatic shallow-water model. Water 2020, 12, 2832. [Google Scholar] [CrossRef]
- Young, C.C.; Wu, C.H.; Kuo, J.T.; Liu, W.C. A high-order σ-coordinate no-hydrostatic model for nonlinear surface waves. Ocean Eng. 2007, 34, 1357–1370. [Google Scholar] [CrossRef]
- Guizien, K.; Barthelemy, E. Accuracy of solitary wave generation by a piston wave maker. J. Hydraul. Res. 2002, 40, 321–331. [Google Scholar]
- Young, C.C.; Wu, C.H.; Liu, W.C.; Kuo, J.T. A high-order non-hydrostatic σ model for simulating non-linear refraction-diffraction of water waves. Coast. Eng. 2009, 56, 919–930. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-Capturing non-hydrostatic model for fully dispersive surface wave processes. Ocean Model. 2012, 43, 22–35. [Google Scholar] [CrossRef]
- Young, C.C.; Wu, C.H. Nonhydrostatic modeling of nonlinear deep-water wave groups. J. Eng. Mech. 2010, 136, 155–167. [Google Scholar] [CrossRef]
- Young, C.C.; Chao, W.T.; Ting, C.L. Applicable sloping range and bottom smoothing treatment for σ-based modeling of wave propagation over rapidly varying topography. Ocean Eng. 2016, 125, 261–271. [Google Scholar] [CrossRef]
- Young, C.C.; Wu, C.H.; Hsu, T.W. The role of non-hydrostatic effects in nonlinear dispersive wave modeling. Water 2020, 12, 3513. [Google Scholar] [CrossRef]
- Stelling, G.S.; Van-Kester, J.A.T.M. On the approximation of horizontal gradients in sigma co-ordinates for bathymetry with steep bottom slopes. Int. J. Numer. Methods Fluids 1994, 18, 915–935. [Google Scholar] [CrossRef]
- Yuan, H.; Wu, C.H. A two dimensional vertical non-hydrostatic s-model with an implicit method for free-surface flows. Int. J. Numer. Methods Fluids 2004, 44, 811–835. [Google Scholar] [CrossRef]
- Mitotakis, D.; Synolakis, C.; McGuinness, M. A modified Galerkin/finite element method for the numerical solution of the Serre-Green-Naghdi system. Int. J. Numer. Methods Fluids 2016, 83, 755–778. [Google Scholar] [CrossRef]
- Stelling, G.S.; Zijlema, M. An accurate and efficient finite-difference algorithm for non-hydrostatic free-surface flow with application to wave propagation. Int. J. Numer. Methods Fluids 2003, 43, 1–23. [Google Scholar] [CrossRef]
- Yuan, H.; Wu, C.H. Fully nonhydrostatic modeling of surface waves. J. Eng. Mech. 2006, 132, 447–456. [Google Scholar] [CrossRef]
- Liang, S.J.; Tang, J.H.; Wu, M.S. Solution of shallow-water equations using least-squares finite-element method. Acta Mech. Sin. 2008, 24, 523–532. [Google Scholar] [CrossRef]
- Liang, S.J.; Hsu, T.W. Least-Squares finite-element method for shallow-water equations with source terms. Acta Mech. Sin. 2009, 25, 597–610. [Google Scholar] [CrossRef]
- Casulli, V. Semi-Implicit finite difference methods for two-dimensional shallow water equations. J. Comput. Phys. 1990, 86, 56–74. [Google Scholar] [CrossRef]
- Casulli, V. A semi-implicit finite difference method for non-hydrostatic, free surface flows. Int. J. Numer. Methods Fluids 1999, 30, 425–440. [Google Scholar] [CrossRef]
- Keller, H.B. A new difference scheme for parabolic problems. In Numerical Solutions of Differential Equations-II, Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, College Park, MD, USA, 11–15 May 1970; Hubbard, B., Ed.; Academic Press: New York, NY, USA, 1971; pp. 327–350. [Google Scholar]
- Casulli, V.; Stalelling, G.S. Numerical simulation of 3D quasi-hydrostatic, free surface flows. J. Hydraul. Eng. 1998, 124, 678–686. [Google Scholar] [CrossRef]
- Wei, P.; Jia, Y. A depth-integrated non-hydrostatic finite element model wave propagation. Int. J. Numer. Methods Fluids 2013, 73, 976–1000. [Google Scholar] [CrossRef]
- Walters, R.A. A semi-implicit finite element model for non-hydrostatic (dispersive) surface waves. Int. J. Numer. Methods Fluids 2005, 49, 721–737. [Google Scholar] [CrossRef]
- Yamazaki, Y.; Kowalik, Z.; Cheung, K.F. Depth-Integrated, non-hydrostatic model for wave breaking and run-up. Int. J. Numer. Methods Fluids 2008, 61, 473–497. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | Step Geometry | H (m) | |
|---|---|---|---|
| B (m) | d (m) | ||
| Case 01 * | 10 | 0.05 | 0.009 |
| Case 02 * | 10 | 0.05 | 0.0133 |
| Case 03 * | 10 | 0.07 | 0.009 |
| Case 04 * | 20 | 0.05 | 0.009 |
| Case 05 * | 20 | 0.07 | 0.009 |
| Case 06 * | 20 | 0.07 | 0.0133 |
| Case 07 | 30 | 0.05 | 0.009 |
| Case 08 | 50 | 0.05 | 0.009 |
| Case No. | h/d | R_EXP | R_FD | R_FE | T_EXP | T_FD | T_FE | D_EXP | D_FD | D_FE |
|---|---|---|---|---|---|---|---|---|---|---|
| Case 01 | 0.5 | 0.175 | 0.154 | 0.142 | 0.961 | 0.946 | 0.928 | 0.214 | 0.284 | 0.345 |
| Case 02 | 0.5 | 0.161 | 0.142 | 0.132 | 0.914 | 0.953 | 0.900 | 0.372 | 0.266 | 0.415 |
| Case 03 | 0.7 | 0.210 | 0.247 | 0.209 | 0.745 | 0.856 | 0.839 | 0.633 | 0.454 | 0.502 |
| Case 04 | 0.5 | 0.163 | 0.157 | 0.144 | 0.917 | 0.956 | 0.922 | 0.365 | 0.247 | 0.359 |
| Case 05 | 0.7 | 0.255 | 0.247 | 0.228 | 0.714 | 0.846 | 0.842 | 0.652 | 0.472 | 0.489 |
| Case 06 | 0.7 | 0.229 | 0.192 | 0.215 | 0.795 | 0.850 | 0.861 | 0.562 | 0.490 | 0.461 |
| Case 07 | 0.5 | NA | 0.157 | 0.139 | NA | 0.956 | 0.965 | NA | 0.247 | 0.222 |
| Case 08 | 0.5 | NA | 0.157 | 0.139 | NA | 0.956 | 0.966 | NA | 0.247 | 0.218 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chao, W.-T.; Liang, S.-J.; Young, C.-C.; Ting, C.-L. Interactions of Solitary Wave with a Submerged Step: Experiments and Simulations. Water 2021, 13, 1302. https://doi.org/10.3390/w13091302
Chao W-T, Liang S-J, Young C-C, Ting C-L. Interactions of Solitary Wave with a Submerged Step: Experiments and Simulations. Water. 2021; 13(9):1302. https://doi.org/10.3390/w13091302
Chicago/Turabian StyleChao, Wei-Ting, Shin-Jye Liang, Chih-Chieh Young, and Chao-Lung Ting. 2021. "Interactions of Solitary Wave with a Submerged Step: Experiments and Simulations" Water 13, no. 9: 1302. https://doi.org/10.3390/w13091302
APA StyleChao, W. -T., Liang, S. -J., Young, C. -C., & Ting, C. -L. (2021). Interactions of Solitary Wave with a Submerged Step: Experiments and Simulations. Water, 13(9), 1302. https://doi.org/10.3390/w13091302