
A Combined O/U-Tube Oscillatory Water Tunnel for Fluid Flow and Sediment Transport Studies: The Hydrodynamics and Genetic Algorithm


Abstract
:1. Introduction
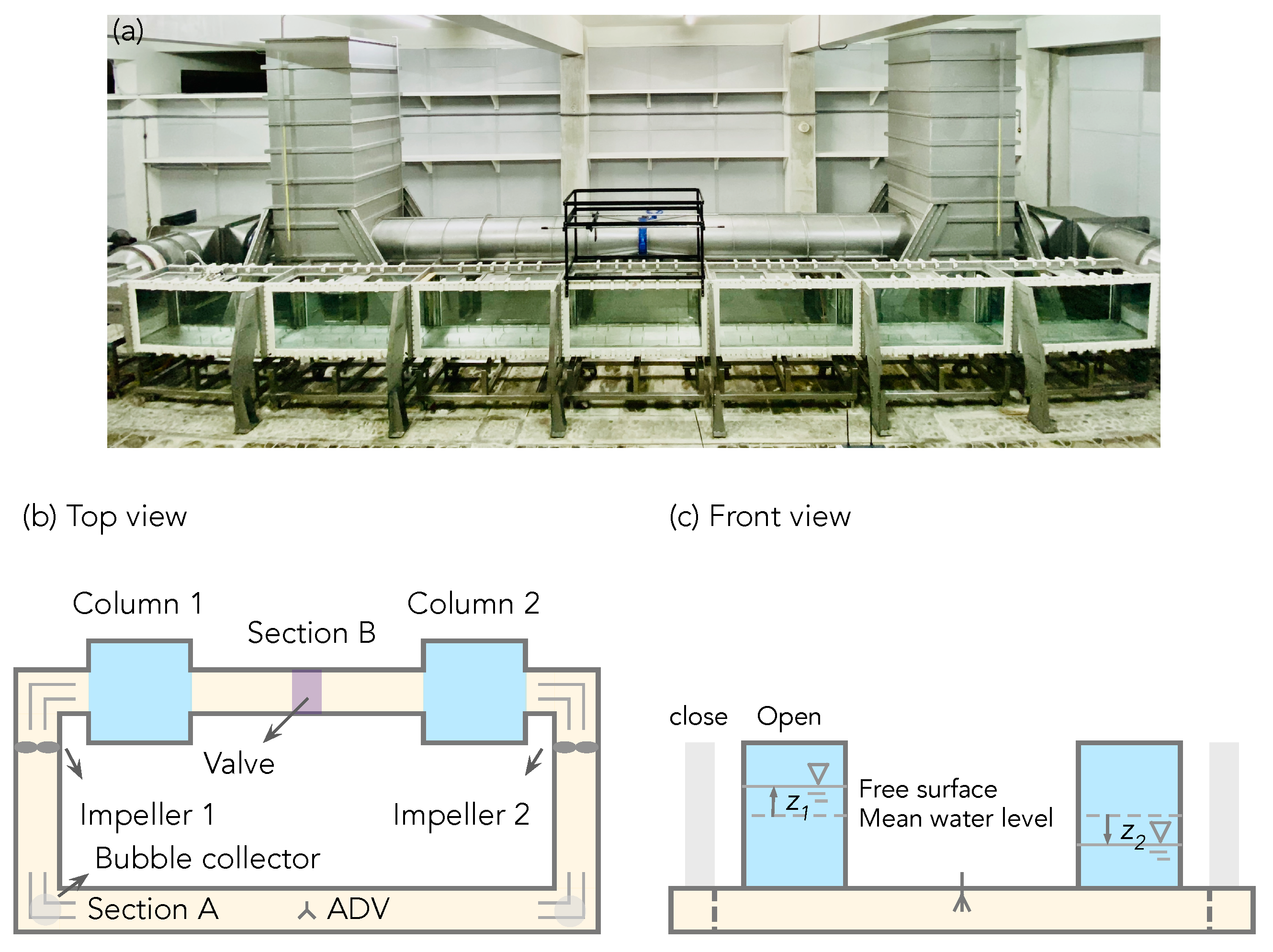
2. The O/U-Tube
3. Hydrodynamics
3.1. Hydrodynamic Model
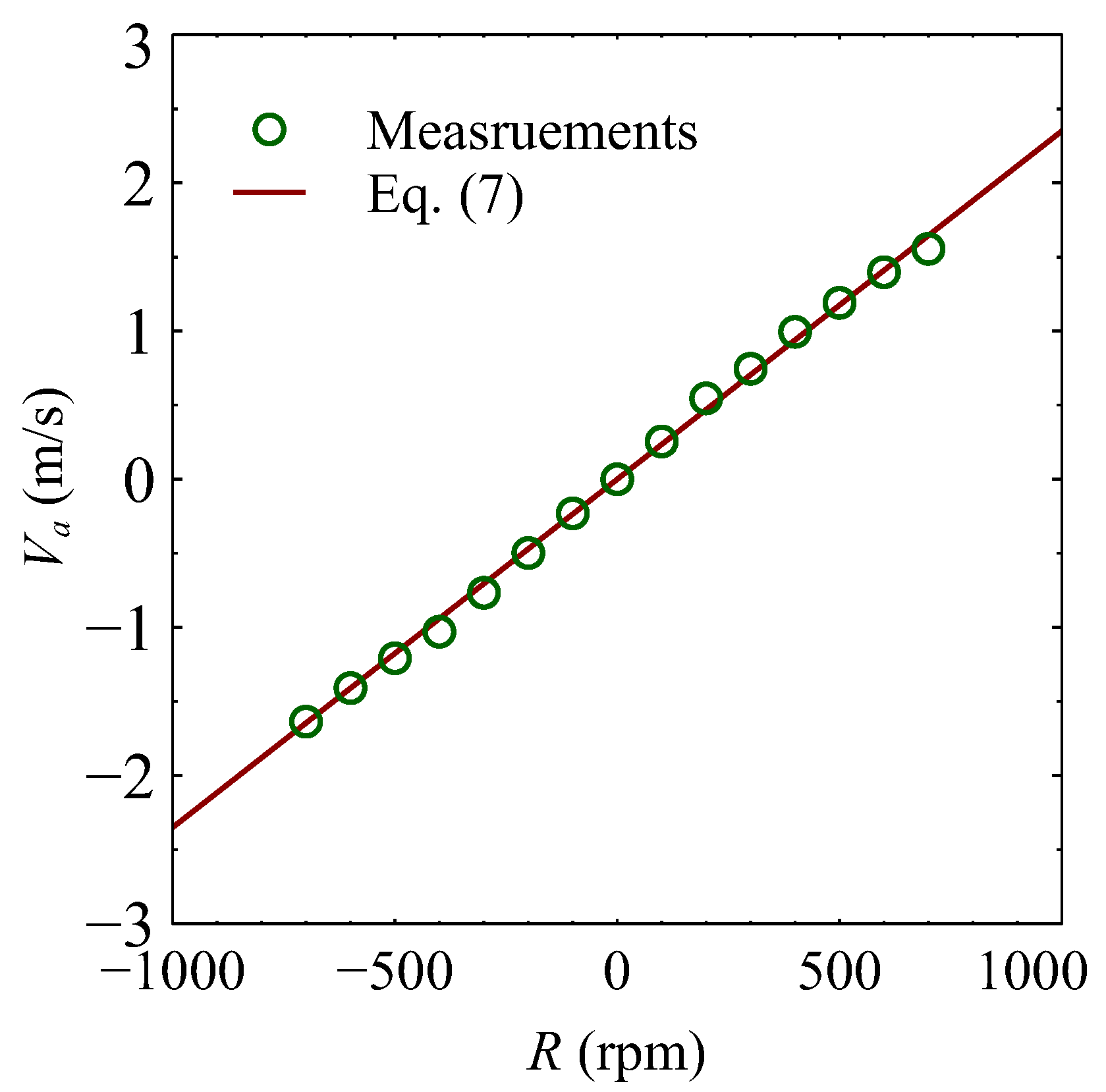
3.2. Steady Flow Conditions with O-Tube Mode
3.3. Oscillatory Flow Conditions with the U-Tube Mode
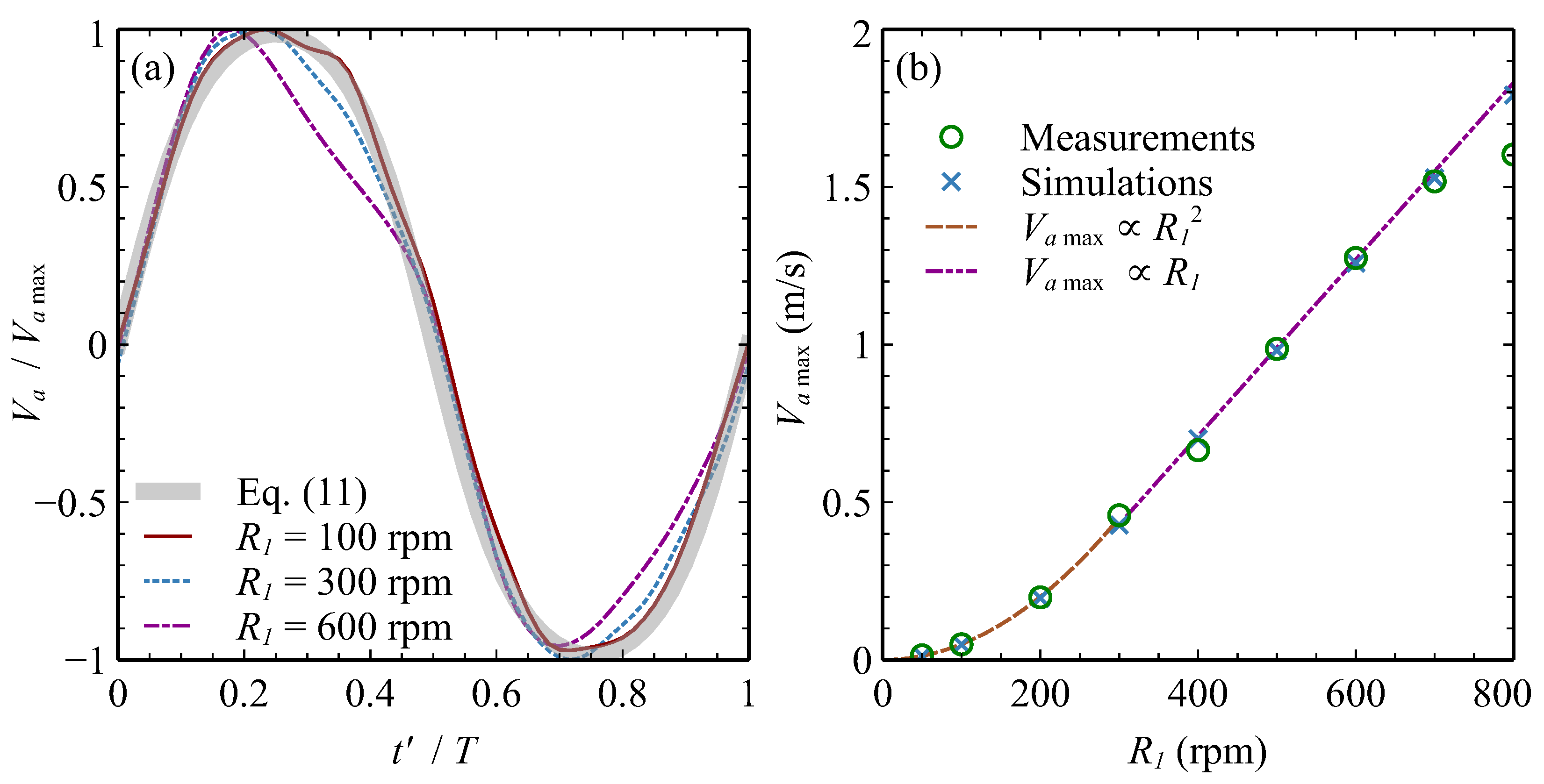
- Case I: and are large.In this case, V and T should be small enough. The force applied by the impellers is balanced mainly by the local inertia force. Only the first term on the LHS in Equation (9) is considered; the second and third terms are ignored. In such a situation, the solution to Equations (8) and (9) is given as follows (substituting Equation (8) into Equation (9) and integrating Equation (9) with respect to t):Equation (11) has been expressed by the Fourier series in amplitude-phase form.
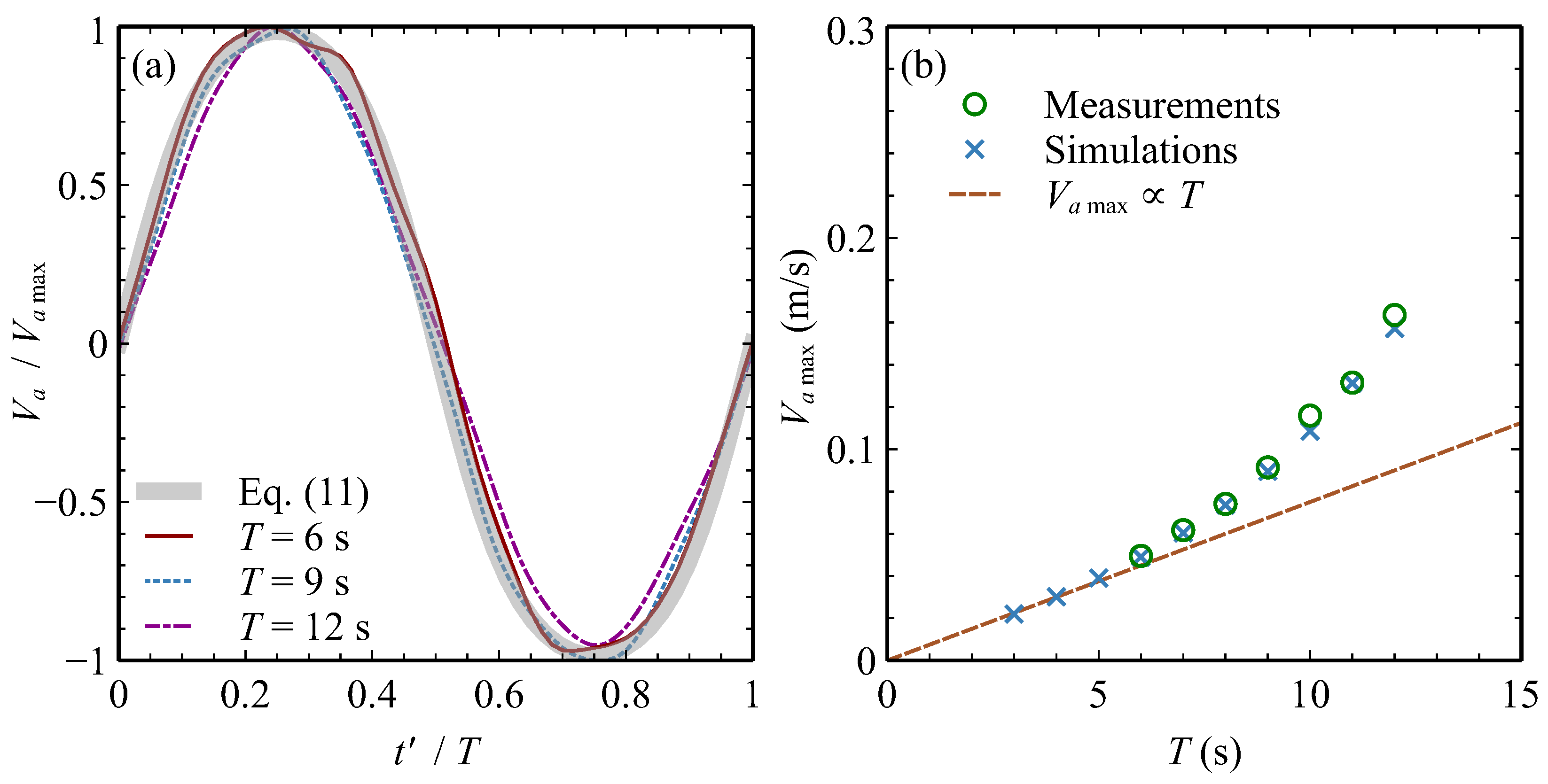
- Case II: is small, but is large.This case occurs when V is small and T is large. The gravitational force dominates. Only the third term on the LHS in Equation (9) is considered when solving Equations (8) and (9) (substituting Equation (8) into Equation (9) and taking derivative of Equation (9)), leading toEquation (12) has been expressed by the Fourier series in amplitude-phase form.
- Case III: and are small.
4. Open-Loop Control
4.1. U-Tube: Analytic Approach
4.2. O-Tube: Genetic Algorithm
- Performing the tournament selection with a tournament size of three. Three chromosomes from the current generation were selected, and the fittest among them became the parent chromosome.
- Conducting the blend crossover with a crossover rate of one. Two offspring chromosomes received random values anywhere between the mother’s chromosome and the father’s chromosome.
- Accomplishing uniform mutation with a mutation rate of 0.4. All possible values were equally probable for the mutated gene.
- We repeated Steps 1–3 until the population size was big enough (60).
- Performing elitism. We compared the fineness of all the generated chromosomes and all the previous chromosomes, selecting the top 50% chromosomes according to the fitness as the next population.
- Steps 1–5 were repeated 60 times.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fredsoe, J.; Deigaard, R. Mechanics of Coastal Sediment Transport; World Scientific: Singapore, 1994. [Google Scholar]
- Nielsen, P. Coastal Bottom Boundary Layers and Sediment Transport; World Scientific: Singapore, 1992. [Google Scholar]
- Dean, R.G.; Dalrymple, R.A. Coastal Processes with Engineering Applications; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Daily, J.W. The Water Tunnel as a Tool in Hydraulic Research. In Proceedings of the Third Hydraulics Conference, Iowa City, IA, USA, 10–12 June 1947; pp. 169–189. [Google Scholar]
- López de San Román-Blanco, B.; Coates, T.T.; Holmes, P.; Chadwick, A.J.; Bradbury, A.; Baldock, T.E.; Pedrozo-Acuña, A.; Lawrence, J.; Grüne, J. Large scale experiments on gravel and mixed beaches: Experimental procedure, data documentation and initial results. Coast. Eng. 2006, 53, 349–362. [Google Scholar] [CrossRef]
- Zhang, H.; Geng, B. Introduction of the world largest wave flume constructed by TIWTE. Procedia Eng. 2015, 116, 905–911. [Google Scholar] [CrossRef] [Green Version]
- Hsu, W.Y.; Huang, Z.C.; Na, B.; Chang, K.A.; Chuang, W.L.; Yang, R.Y. Laboratory Observation of Turbulence and Wave Shear Stresses Under Large Scale Breaking Waves Over a Mild Slope. J. Geophys. Res. 2019, 124, 7486–7512. [Google Scholar] [CrossRef]
- Ribberink, J.S.; Al-Salem, A.A. Sediment transport in oscillatory boundary layers in cases of rippled beds and sheet flow. J. Geophys. Res. 1994, 99, 12707–12727. [Google Scholar] [CrossRef]
- Yuan, J.; Madsen, O.S. Experimental study of turbulent oscillatory boundary layers in an oscillating water tunnel. Coast. Eng. 2014, 89, 63–84. [Google Scholar] [CrossRef]
- Mohr, H.; Draper, S.; White, D.J.; Cheng, L.; An, H.; Zhang, Q. The hydrodynamics of a recirculating (O-tube) flume. In Proceedings of the Scour and Erosion-Proceedings of the 8th International Conference on Scour and Erosion, ICSE 2016, Oxford, UK, 12–15 September 2016; pp. 999–1010. [Google Scholar]
- An, H.; Luo, C.; Cheng, L.; White, D. A new facility for studying ocean-structure–seabed interactions: The O-tube. Coast. Eng. 2013, 82, 88–101. [Google Scholar] [CrossRef]
- Yang, Z.; Huang, B.; Kang, A.; Zhu, B.; Han, J.; Yin, R.; Li, X. Experimental study on the solitary wave-current interaction and the combined forces on a vertical cylinder. Ocean Eng. 2021, 236. [Google Scholar] [CrossRef]
- Van der Werf, J.J.; Schretlen, J.J.; Ribberink, J.S.; O’Donoghue, T. Database of full-scale laboratory experiments on wave-driven sand transport processes. Coast. Eng. 2009, 56, 726–732. [Google Scholar] [CrossRef]
- Wurbs, R.; James, W. Water Resources Engineering; Pearson Education Taiwan Ltd.: Taipei, Taiwan, 2002. [Google Scholar]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. In Multimedia Tools and Applications; Springer: New York, NY, USA, 2021; Volume 80, pp. 8091–8126. [Google Scholar]
- White, F. Fluid Mechanics; McGraw-Hill: New York, NY, USA, 2010. [Google Scholar]
- Lamb, H. Hydrodynamics, 6th ed.; Dover Publications: New York, NY, USA, 1945. [Google Scholar]
- Ferziger, J.H.; Peric, M. Computational Methods for Fluid Dynamics; Springer: Berlin, Germany, 2002. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 1.22 | 0.6 | 18.35 m | |||
| 7.5 m | 0.33 m2 | 0.33 m2 | |||
| 0.2 m2 | 0.33 m2 | 0.16 m2 | |||
| 1.21 m2 | 150 or 120 | 2 | |||
| 0.341 rad2/kg m |
| GA Parameters | Setting Values |
|---|---|
| Code method | Real coded |
| Population size | 60 |
| Generation | 60 |
| Selection | Tournament selection |
| Crossover algorithm | Blend crossover |
| Crossover rate | 1.0 |
| Mutation algorithm | Uniform mutation |
| Mutation rate | 0.4 |
| Elitism | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-H.; Chen, J.-Y.; Lee, F.-S.; Chang, L.-C. A Combined O/U-Tube Oscillatory Water Tunnel for Fluid Flow and Sediment Transport Studies: The Hydrodynamics and Genetic Algorithm. Water 2022, 14, 1767. https://doi.org/10.3390/w14111767
Lee C-H, Chen J-Y, Lee F-S, Chang L-C. A Combined O/U-Tube Oscillatory Water Tunnel for Fluid Flow and Sediment Transport Studies: The Hydrodynamics and Genetic Algorithm. Water. 2022; 14(11):1767. https://doi.org/10.3390/w14111767
Chicago/Turabian StyleLee, Cheng-Hsien, Jia-You Chen, Fang-Shou Lee, and Li-Chiu Chang. 2022. "A Combined O/U-Tube Oscillatory Water Tunnel for Fluid Flow and Sediment Transport Studies: The Hydrodynamics and Genetic Algorithm" Water 14, no. 11: 1767. https://doi.org/10.3390/w14111767
APA StyleLee, C. -H., Chen, J. -Y., Lee, F. -S., & Chang, L. -C. (2022). A Combined O/U-Tube Oscillatory Water Tunnel for Fluid Flow and Sediment Transport Studies: The Hydrodynamics and Genetic Algorithm. Water, 14(11), 1767. https://doi.org/10.3390/w14111767