
A PIV-Based Algorithm for Simultaneous Determination of Multiple Velocity Fields from Stratified Crossflows in Single Field of View



Abstract
:1. Introduction
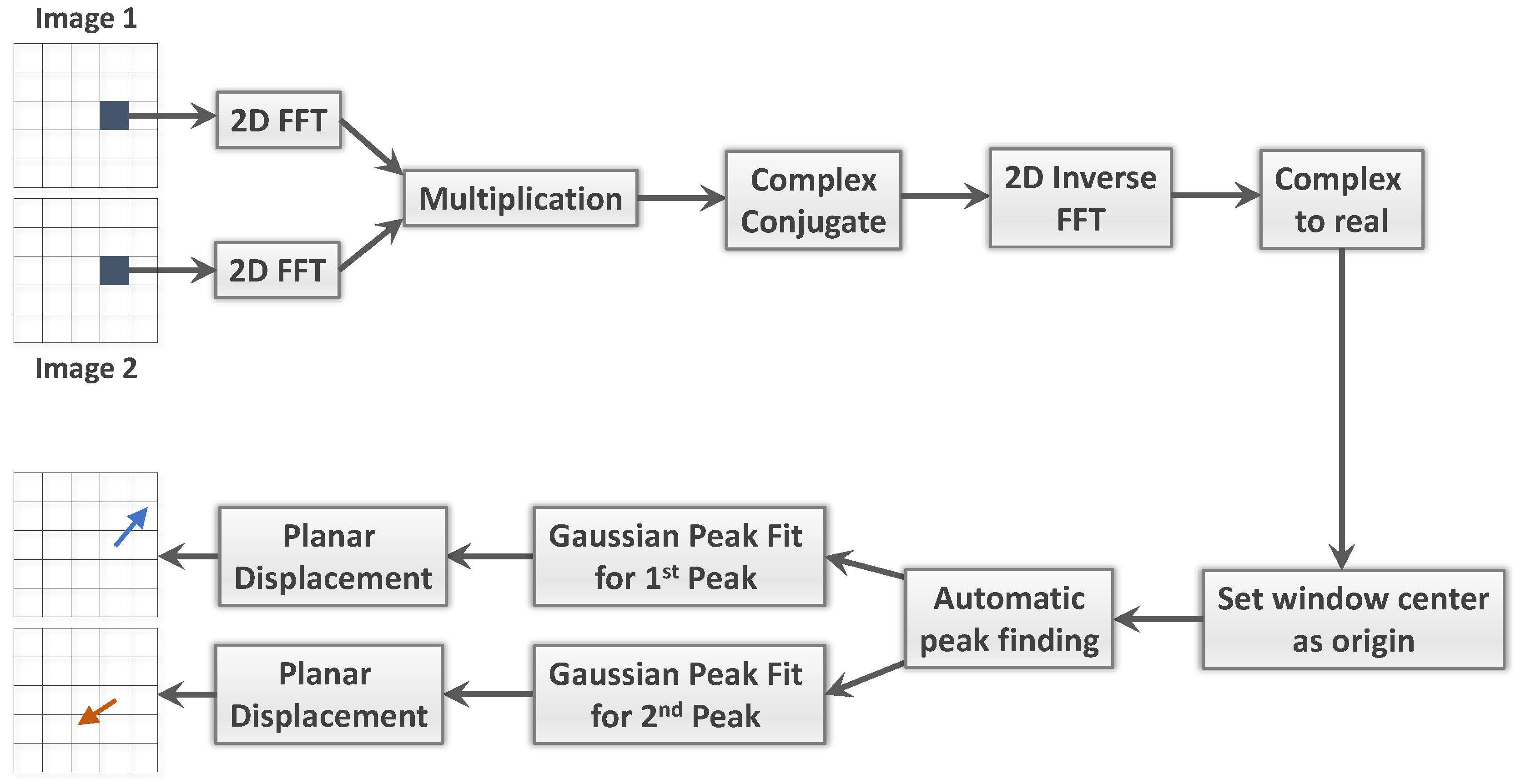
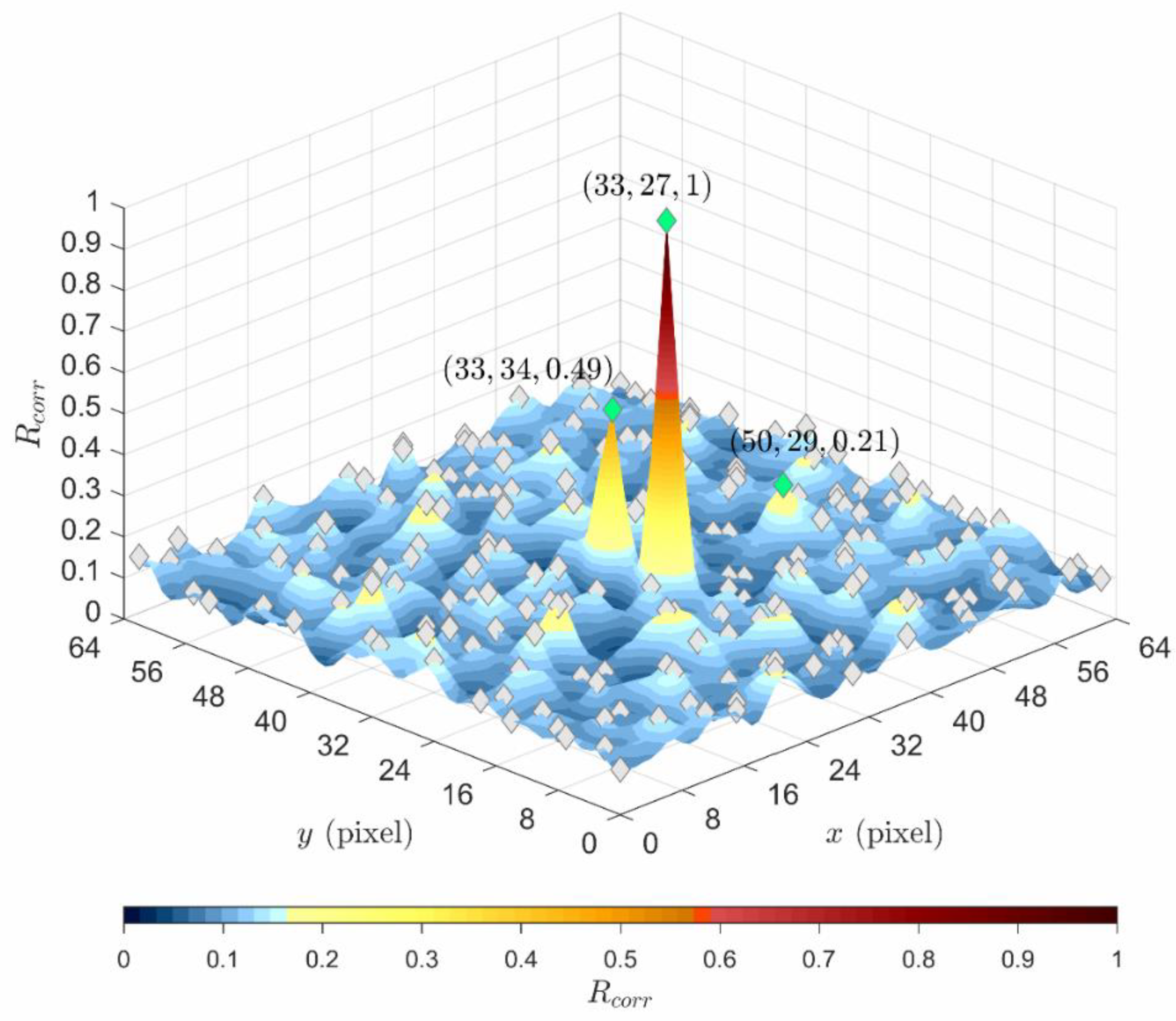
2. Algorithm
3. Validation
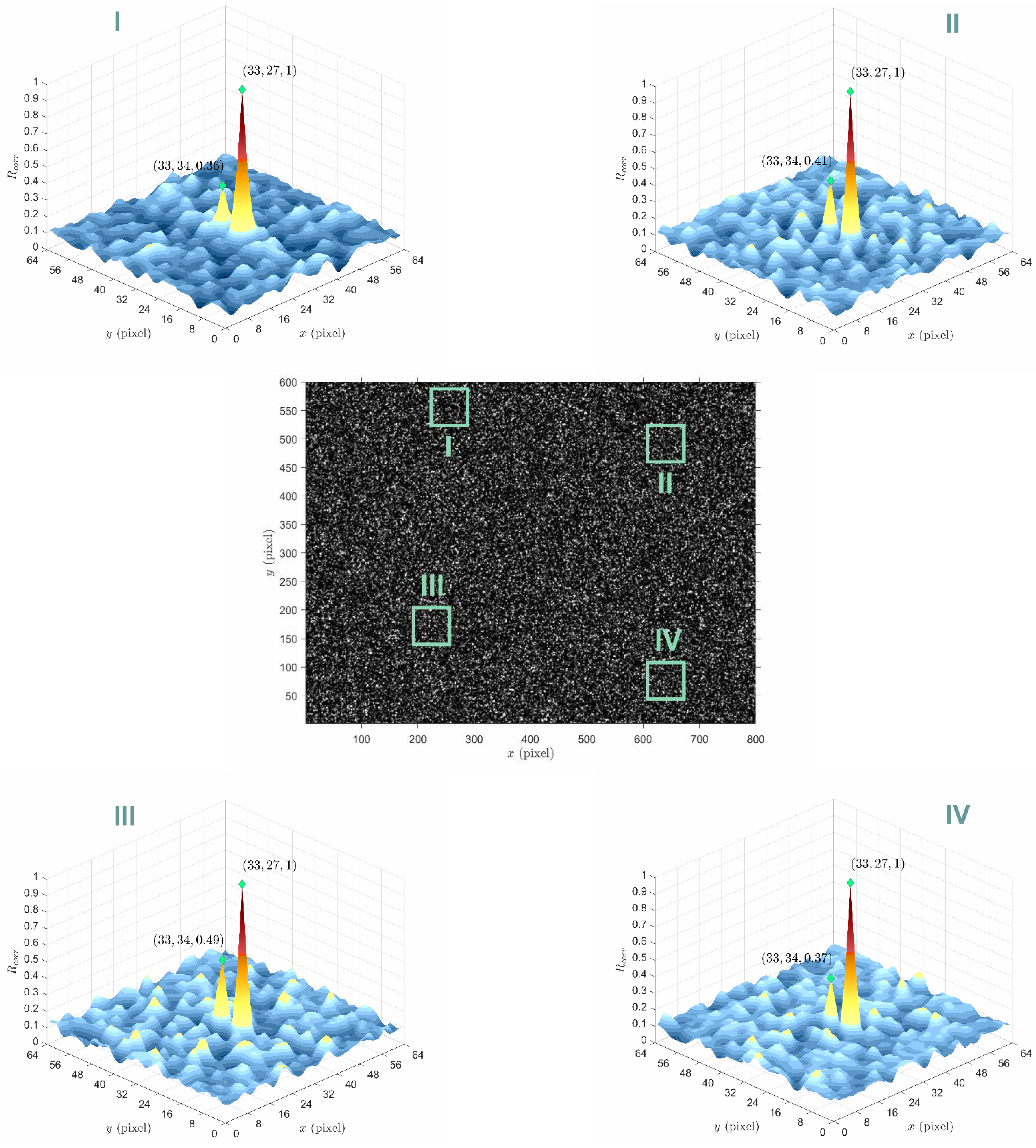
3.1. Synthetic Crossflow
3.1.1. Synthetic Image Generation
3.1.2. Validation Result for Synthetic Image
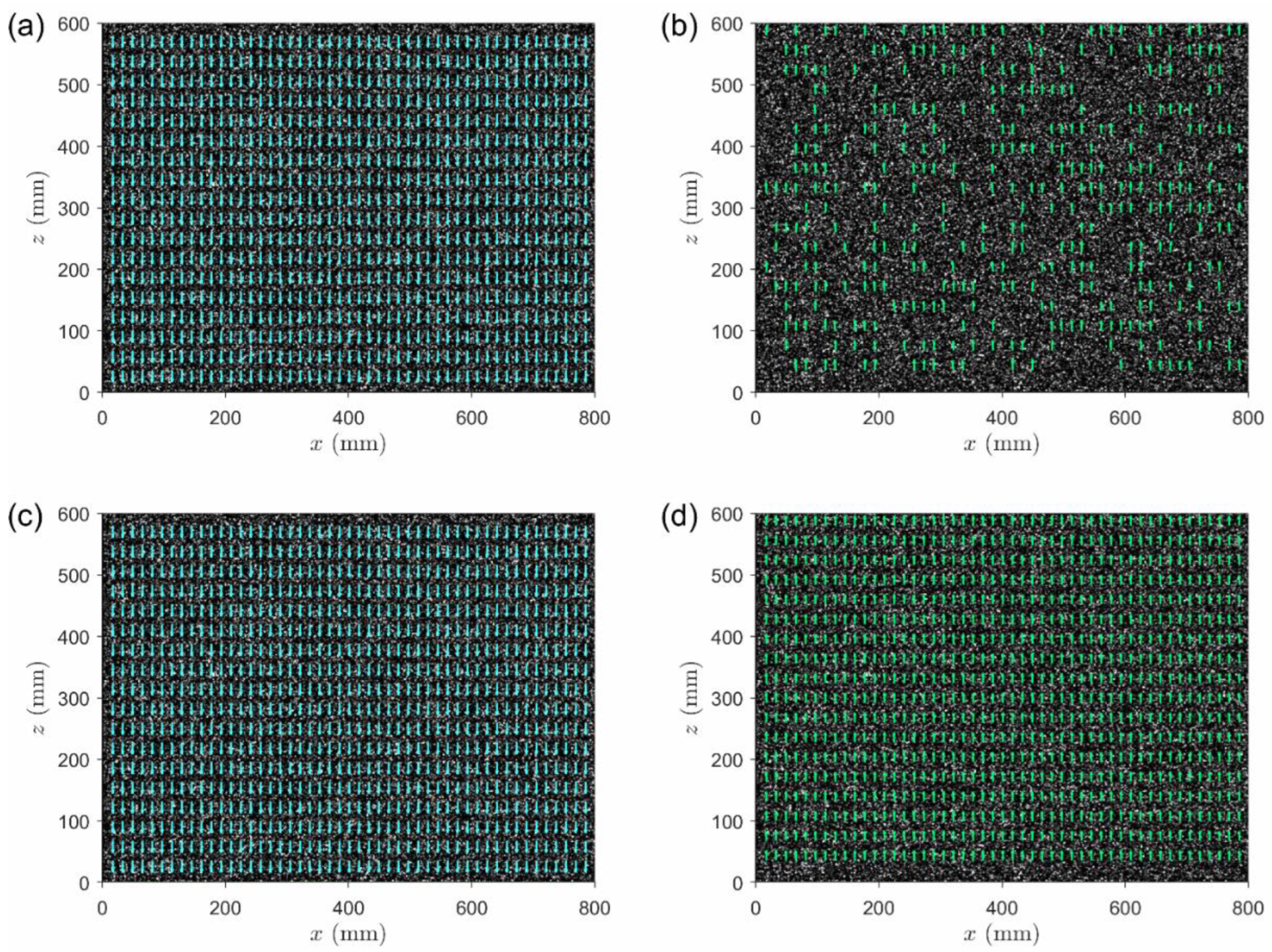
3.2. Stratified Crossflow Fields in PIV Measurement
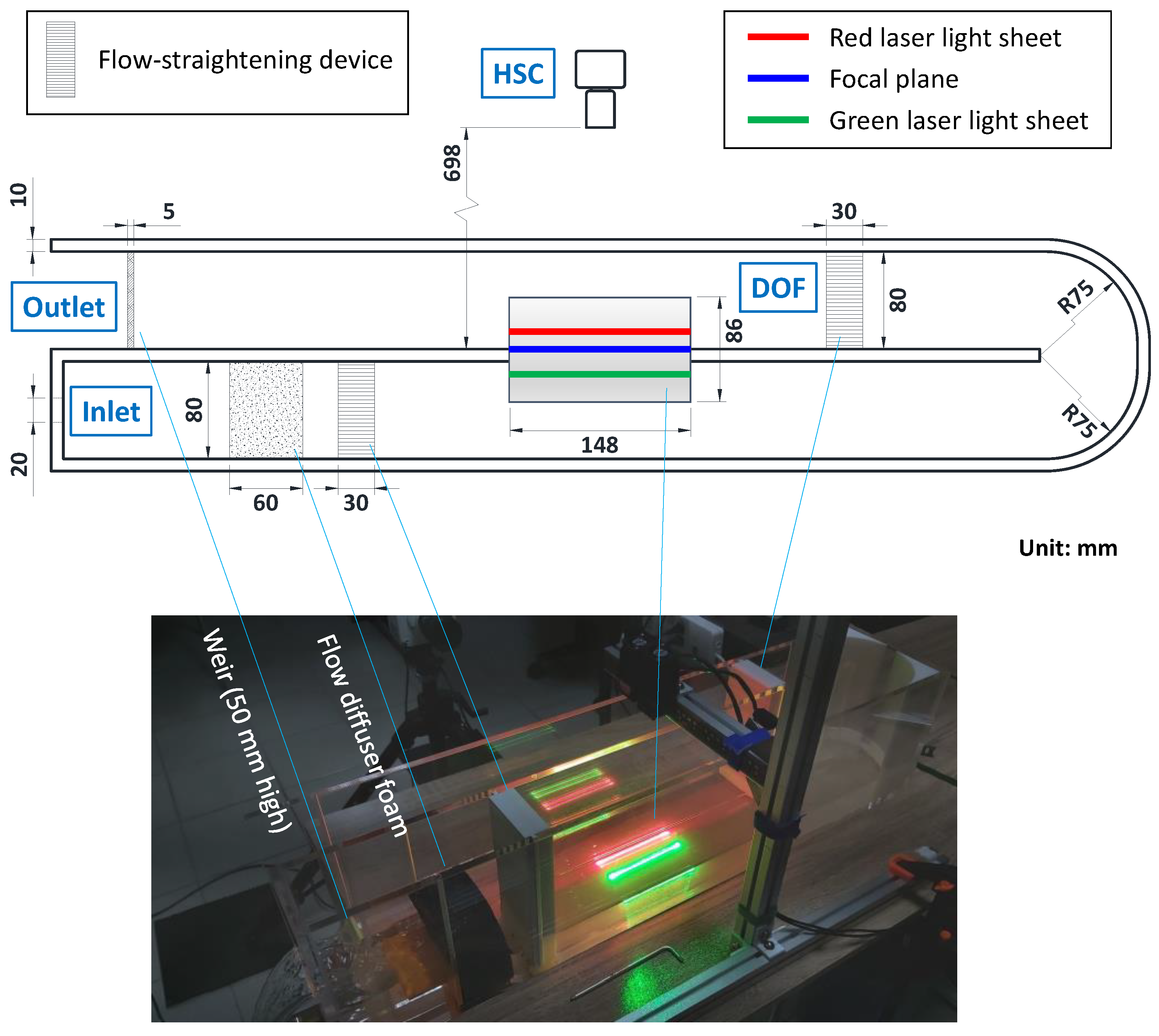
3.2.1. PIV Measurement Setup
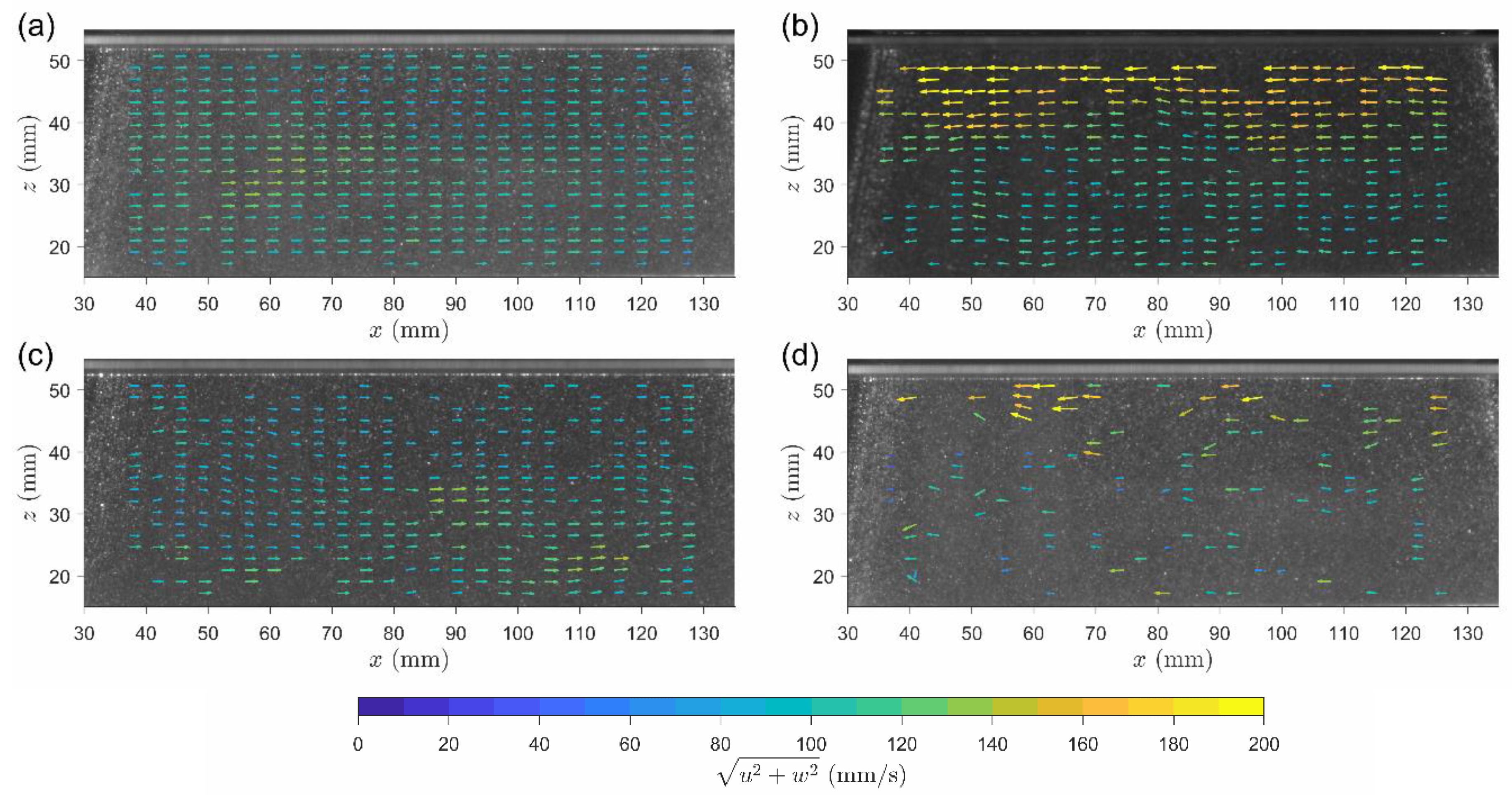
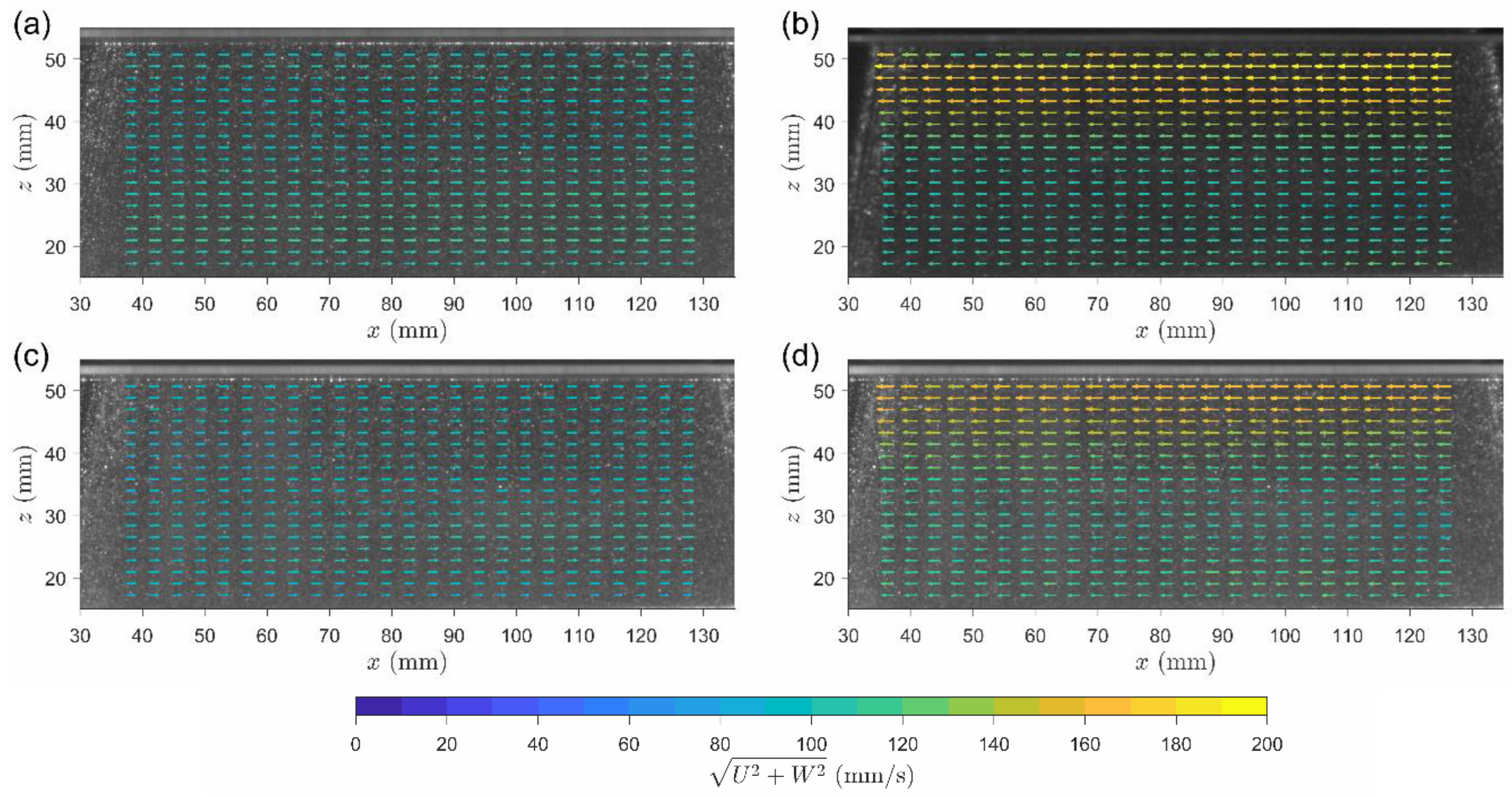
3.2.2. Validation Result in PIV Measurement
4. Discussions
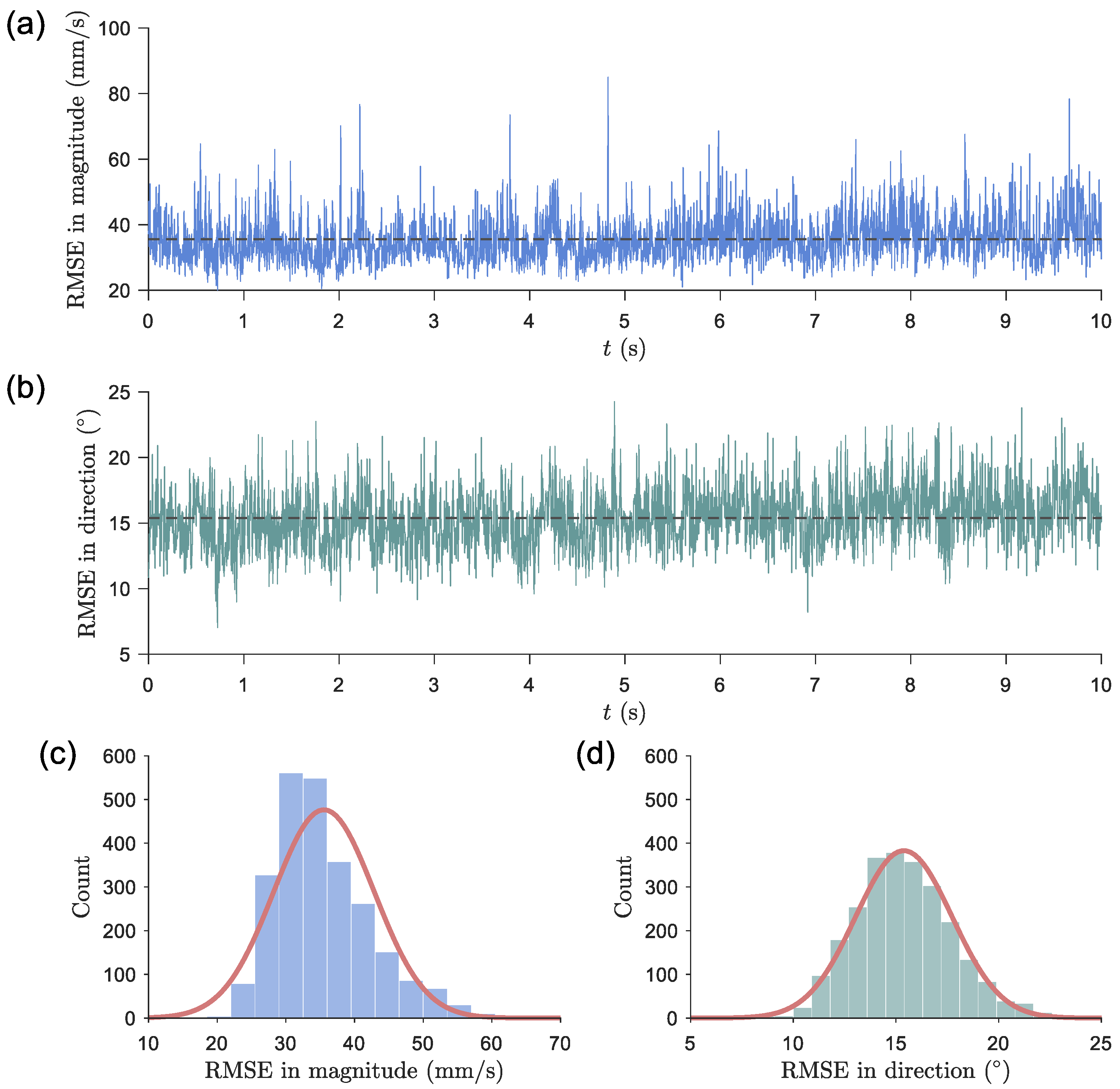
4.1. Uncertainties and Error Reduction
4.2. Spurious Vector Filtering
4.3. Limitations and Suggestions for Applications
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Raffel, M.; Kähler, C.J.; Willert, C.E.; Wereley, S.T.; Scarano, F.; Kompenhans, J. Particle Image Velocimetry: A Practical Guide; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Masullo, A.; Theunissen, R. On dealing with multiple correlation peaks in PIV. Exp. Fluids 2018, 59, 89. [Google Scholar] [CrossRef] [Green Version]
- Whiteman, C.D.; Lehner, M.; Hoch, S.W.; Adler, B.; Kalthoff, N.; Haiden, T. Katabatically Driven Cold Air Intrusions into a Basin Atmosphere. J. Appl. Meteorol. Clim. 2018, 57, 435–455. [Google Scholar] [CrossRef]
- Guo, D.P.; Zhao, P.; Yao, R.T.; Li, Y.P.; Hu, J.M.; Fan, D. Numerical and Wind Tunnel Simulation Studies of the Flow Field and Pollutant Diffusion around a Building under Neutral and Stable Atmospheric Stratifications. J. Appl. Meteorol. Clim. 2019, 58, 2405–2420. [Google Scholar] [CrossRef]
- Wang, Y.S.; MacCall, B.T.; Hocut, C.M.; Zeng, X.P.; Fernando, H.J.S. Simulation of stratified flows over a ridge using a lattice Boltzmann model. Environ. Fluid Mech. 2020, 20, 1333–1355. [Google Scholar] [CrossRef] [Green Version]
- Browning, K.A.; Clough, S.A.; Davitt, C.S.A.; Roberts, N.M.; Hewson, T.D.; Healey, P.G.W. Observations of the mesoscale sub-structure in the cold air of a developing frontal cyclone. Q. J. R. Meteorol. Soc. 1995, 121, 1229–1254. [Google Scholar] [CrossRef]
- Clerbaux, C.; Hadji-Lazaro, J.; Turquety, S.; George, M.; Boynard, A.; Pommier, M.; Safieddine, S.; Coheur, P.F.; Hurtmans, D.; Clarisse, L.; et al. Tracking pollutants from space: Eight years of IASI satellite observation. Comptes Rendus Geosci. 2015, 347, 134–144. [Google Scholar] [CrossRef]
- Velden, C.; Lewis, W.E.; Bresky, W.; Stettner, D.; Daniels, J.; Wanzong, S. Assimilation of high-resolution satellite-derived atmospheric motion vectors: Impact on HWRF forecasts of tropical cyclone track and intensity. Mon. Weather Rev. 2017, 145, 1107–1125. [Google Scholar] [CrossRef]
- Chuang, W.L.; Chou, C.B.; Chang, K.A.; Chang, Y.C.; Chin, H.L. Atmospheric Motion Vectors Derived from an Infrared Window Channel of a Geostationary Satellite Using Particle Image Velocimetry. J. Appl. Meteorol. Clim. 2019, 58, 199–211. [Google Scholar] [CrossRef]
- Garcia, A.M.P.; Geyer, W.R.; Randall, N. Exchange Flows in Tributary Creeks Enhance Dispersion by Tidal Trapping. Estuaries Coasts 2022, 45, 363–381. [Google Scholar] [CrossRef]
- Kim, H.D.; Kim, K.H. Analysis of Rip Current Characteristics Using Dye Tracking Method. Atmosphere 2021, 12, 719. [Google Scholar] [CrossRef]
- Lee, C.H.; Kuan, Y.H. Onset of submerged granular collapse in densely packed condition. Phys. Fluids 2021, 33, 121705. [Google Scholar] [CrossRef]
- Wu, H.L.; Hsiao, S.C.; Lin, T.C. Evolution of a two-layer fluid for solitary waves propagating over a submarine trench. Ocean Eng. 2015, 110, 36–50. [Google Scholar] [CrossRef]
- Thielicke, W.; Sonntag, R. Particle Image Velocimetry for MATLAB: Accuracy and enhanced algorithms in PIVlab. J. Open Res. Softw. 2021, 9, 12. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Magnitude (Pixel) | Direction (Degree) | |||
|---|---|---|---|---|
| 1st Peak | 2nd Peak | 1st Peak | 2nd Peak | |
| Expected | 5 | 4 | −90 | 90 |
| RMSE | 0.04 | 0.05 | 0.06 | 0.70 |
| Resolution (Pixels) | Field of View (FOV) Size (mm2) | DOF (mm) | Distance-to-Focal Plane (mm) | Frame Rate (fps) |
|---|---|---|---|---|
| 1280 × 800 | 148 × 69 | 86 | 698 | 258 |
| Magnitude (mm/s) | Direction (mm/s) | |||
|---|---|---|---|---|
| 1st Peak | 2nd Peak | 1st Peak | 2nd Peak | |
| Expected | 86.93 | 106.75 | 0.16 | 179.61 |
| RMSE | 8.06 | 9.98 | 1.35 | 0.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chuang, W.-L.; Lin, S.-M. A PIV-Based Algorithm for Simultaneous Determination of Multiple Velocity Fields from Stratified Crossflows in Single Field of View. Water 2022, 14, 1877. https://doi.org/10.3390/w14121877
Chuang W-L, Lin S-M. A PIV-Based Algorithm for Simultaneous Determination of Multiple Velocity Fields from Stratified Crossflows in Single Field of View. Water. 2022; 14(12):1877. https://doi.org/10.3390/w14121877
Chicago/Turabian StyleChuang, Wei-Liang, and Sheng-Mei Lin. 2022. "A PIV-Based Algorithm for Simultaneous Determination of Multiple Velocity Fields from Stratified Crossflows in Single Field of View" Water 14, no. 12: 1877. https://doi.org/10.3390/w14121877
APA StyleChuang, W. -L., & Lin, S. -M. (2022). A PIV-Based Algorithm for Simultaneous Determination of Multiple Velocity Fields from Stratified Crossflows in Single Field of View. Water, 14(12), 1877. https://doi.org/10.3390/w14121877