
A New Turbulence Model for Breaking Wave Simulations




Abstract
:1. Introduction
2. Governing Equations
3. Turbulence Models
3.1. Smagorinsky Turbulence Model
3.2. Turbulence Model
4. Numerical Schemes
4.1. Numerical Scheme with TVD Reconstructions
4.2. Numerical Scheme with WTENO Reconstructions
5. Results
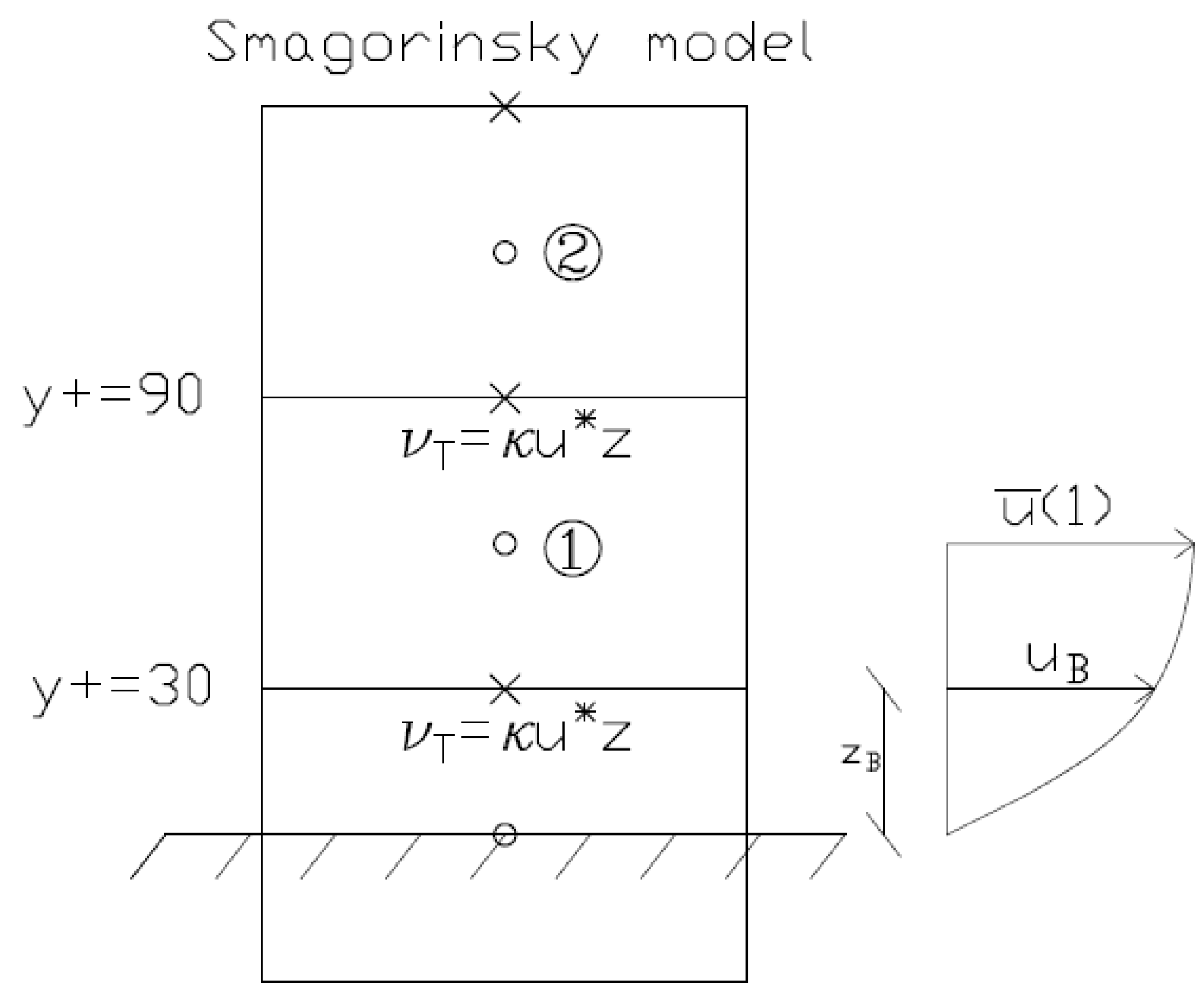
- Configuration TS. In this configuration, the eddy viscosity is expressed through the Smagorinsky model given in Section 3.1. The equations of motion are solved by the low-order numerical scheme exposed in Section 4.1 (TVD and approximate Riemann solver). In this numerical scheme, the Poisson equation is expressed in terms of primitive variables (, and ). The discretization of the calculation grid cells in the turbulent boundary layer is shown in Figure 3. The first calculation grid cell (indicated with a 1 in Figure 3) in which the equations of motion are solved, is placed in the turbulent core. The boundary condition for the velocity, , parallel to the bottom, is placed on the lower face of the first cell ( in Figure 3), at the border between the buffer layer and the turbulent core, where is equal to . The velocity boundary condition, , is calculated by using the logarithmic law (Equation (10)) from the value of the velocity calculated at the center of the first calculation grid cell, once the value of the friction velocity, , is known. On the lower and upper faces of the first calculation grid cell (at and , respectively), the eddy viscosity is calculated by using Equation (9). Outside the boundary layer (), the Smagorinsky model is used for determining the eddy viscosity (Equation (5)).
- Configuration WS. This configuration differs from Configuration TS only by the numerical scheme: the reconstructions of the point values of the conserved variables are carried out by the WTENO technique; the time advancing of the point values of the conserved variables on the cell faces is obtained by an exact Riemann solver; the Poisson equation is expressed as a function of the conserved variables (, and ).
- WKC configuration. This configuration differs from Configuration WS only by the turbulence model: the eddy viscosity is expressed by the new Constant turbulence model (where the turbulent kinetic energy is in contravariant form) exposed in Section 3.2. In this model, the mixing length is calculated by Equation (16). The discretization of the calculation grid cells in the turbulent boundary layer is shown in Figure 4a. The first grid node in which the turbulent kinetic energy is calculated is placed on the upper face of the second calculation grid cell, indicated with a 2 in Figure 4a, in the turbulent core. On the lower face of the same calculation grid cell (at ) is placed the turbulent kinetic energy boundary condition, given by Equation (21).
- Configuration WK. This configuration differs from Configuration WKC only by the turbulence model: we propose a new turbulence turbulence model in which the mixing length, , is calculated by Equation (17).
- Configuration WKI. This configuration differs from Configuration WK only by the discretization of the boundary layer. In order to adequately take into account the turbulent phenomena and the distribution of the turbulent kinetic energy, it is necessary to solve the equations of motion and the turbulent kinetic energy equation in the turbulent core and in the buffer layer. In this configuration, there are two calculation grid cells in the turbulent core and one also in the buffer layer. The first calculation grid cell in which the equations of motion are solved (indicated with a 1 in Figure 4b) is placed in the buffer layer. The velocity boundary condition, , is placed on the lower face of the first calculation grid cell ( in Figure 4b) at the border between the viscous sublayer and the buffer layer (). On the faces of the first three calculation grid cells (up to ), the eddy viscosity is calculated by Equation (9). In order to take into account the turbulent phenomena also in the proximity of the bottom, the first grid node in which the turbulent kinetic energy is calculated is placed at the lower face of the first calculation grid cell (). The turbulent kinetic energy boundary condition is equal to zero, and is imposed at the seabed (). Up to , the mixing length is given by Equation (22).
5.1. Results Obtained by Smagorinsky Model
5.2. Results Obtained by Model
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Serio, F.; Mossa, M. A laboratory study of irregular shoaling waves. Exp. Fluids 2013, 54, 1536. [Google Scholar] [CrossRef]
- De Serio, F.; Mossa, M. Experimental observations of turbulent events in the surfzone. J. Mar. Sc. Eng. 2019, 7, 332. [Google Scholar] [CrossRef] [Green Version]
- Ting, F.C.K.; Kirby, J.T. Observation undertow and turbulence in a wave period. Coast. Eng. 1995, 24, 177–204. [Google Scholar] [CrossRef]
- De Padova, D.; Mossa, M.; Sibilla, M. SPH numerical investigation of the velocity field and vorticity generation within a hydrofoil-induced spilling breaker. Environ. Fluid Mech. 2016, 16, 267–287. [Google Scholar] [CrossRef]
- De Padova, D.; Meftah, M.B.; De Serio, F.; Mossa, M. Characteristics of breaking vorticity in spilling and plunging waves investigated numerically by SPH. Environ. Fluid Mech. 2020, 20, 233–260. [Google Scholar] [CrossRef]
- Kazolea, M.; Delis, A.I. A well-balance shock-capturing hybrid finite volume-finite difference numerical scheme for extended 1D Boussinesq models. Appl. Numer. Math. 2013, 67, 167–186. [Google Scholar] [CrossRef] [Green Version]
- Kazolea, M.; Delis, A.I.; Synolakis, C.E. Numerical treatment of wave breaking on unstructured finite volume approzimation for extended Boussinesq-type equations. J. Comput. Phys. 2014, 271, 281–305. [Google Scholar] [CrossRef]
- Kozyrakis, G.V.; Delis, A.I.; Alexandrakis, G.; Kampanis, N.A. Numerical modeling of sediment transport applied to coastal morphodynamics. Appl. Numer. Math 2016, 104, 30–46. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-capturing non-hydrostatic model for fully dispersive surface wave processes. Ocean Model. 2012, 43–44, 22–35. [Google Scholar] [CrossRef]
- Cannata, G.; Petrelli, C.; Barsi, L.; Gallerano, F. Numerical integration of the contravariant integral form of the Navier–Stokes equations in time-dependent curvilinear coordinate systems for three-dimensional free surface flows. Contin. Mech. Thermodyn. 2019, 31, 491–519. [Google Scholar] [CrossRef] [Green Version]
- Cannata, G.; Palleschi, F.; Iele, B.; Cioffi, F. A three-dimensional numerical study of wave induced currents in Cetraro Harbour coastal area (Italy). Water 2020, 12, 935. [Google Scholar] [CrossRef] [Green Version]
- Bradford, S.F. Numerical simulation of surf zone dynamics. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 1–13. [Google Scholar] [CrossRef]
- Toro, E.F. Shock-Capturing Methods for Free-Surface Shallow Flows; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Phillips, N.A. A coordinate system having some special advantages for numerical forecasting. J. Meteorol. 1957, 14, 184–185. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.L.F.; Lin, P. A numerical model for breaking waves: The volume of fluid method. Research Report No. CACR-97-02. J. Fluid Mech. 1997, 359, 56. [Google Scholar]
- Cannata, G.; Gallerano, F. A dynamic two-equation sub grid scale model. Continuum Mech. Thermodyn. 2005, 17, 101–123. [Google Scholar] [CrossRef]
- Jiang, G.; Shu, C. Efficient Implementation of Weighted ENO Schemes. J. Comput. Phys. 1996, 126, 202–228. [Google Scholar] [CrossRef] [Green Version]
- Peng, J.; Liu, S.; Li, S.; Zhang, K.; Shen, Y. An efficient targeted ENO scheme with local adaptive dissipation for compressible flow simulation. J. Comput. Phys. 2021, 425, 109902. [Google Scholar] [CrossRef]
- Liu, X.; Duncan, J. An experimental study of surfactant effects on spilling breakers. J. Fluid Mech. 2006, 567, 433–455. [Google Scholar] [CrossRef]
- Liu, X.; Duncan, J. Weakly breaking waves in the presence of surfactant micelles. Phys. Rev. E 2007, 76, 061201-1–061201-5. [Google Scholar] [CrossRef]
- Stagonas, D.; Warbrick, D.; Muller, G.; Magagna, D. Surface tension effects on energy dissipation by small scale, experimental breaking waves. Coast. Eng. 2011, 58, 826–836. [Google Scholar] [CrossRef]
- Weigel, R. A presentation of cnoidale wave theory for practical application. J. Fluid. Mech. 1960, 7, 273–286. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Numerical Scheme | Turbulence Model | Vertical Layers | |
|---|---|---|---|---|
| TS | TVD 2nd order + approximated Riemann | Smagorinsky | ||
| WS | WTENO + exact Riemann | Smagorinsky | ||
| WKC | WTENO + exact Riemann | |||
| WK | WTENO + exact Riemann | |||
| WKI | WTENO + exact Riemann |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iele, B.; Palleschi, F.; Cannata, G.; Gallerano, F. A New Turbulence Model for Breaking Wave Simulations. Water 2022, 14, 2050. https://doi.org/10.3390/w14132050
Iele B, Palleschi F, Cannata G, Gallerano F. A New Turbulence Model for Breaking Wave Simulations. Water. 2022; 14(13):2050. https://doi.org/10.3390/w14132050
Chicago/Turabian StyleIele, Benedetta, Federica Palleschi, Giovanni Cannata, and Francesco Gallerano. 2022. "A New Turbulence Model for Breaking Wave Simulations" Water 14, no. 13: 2050. https://doi.org/10.3390/w14132050
APA StyleIele, B., Palleschi, F., Cannata, G., & Gallerano, F. (2022). A New Turbulence Model for Breaking Wave Simulations. Water, 14(13), 2050. https://doi.org/10.3390/w14132050