
Hydrodynamic Border Irrigation Model: Comparison of Infiltration Equations




Abstract
:1. Introduction
2. Model Development
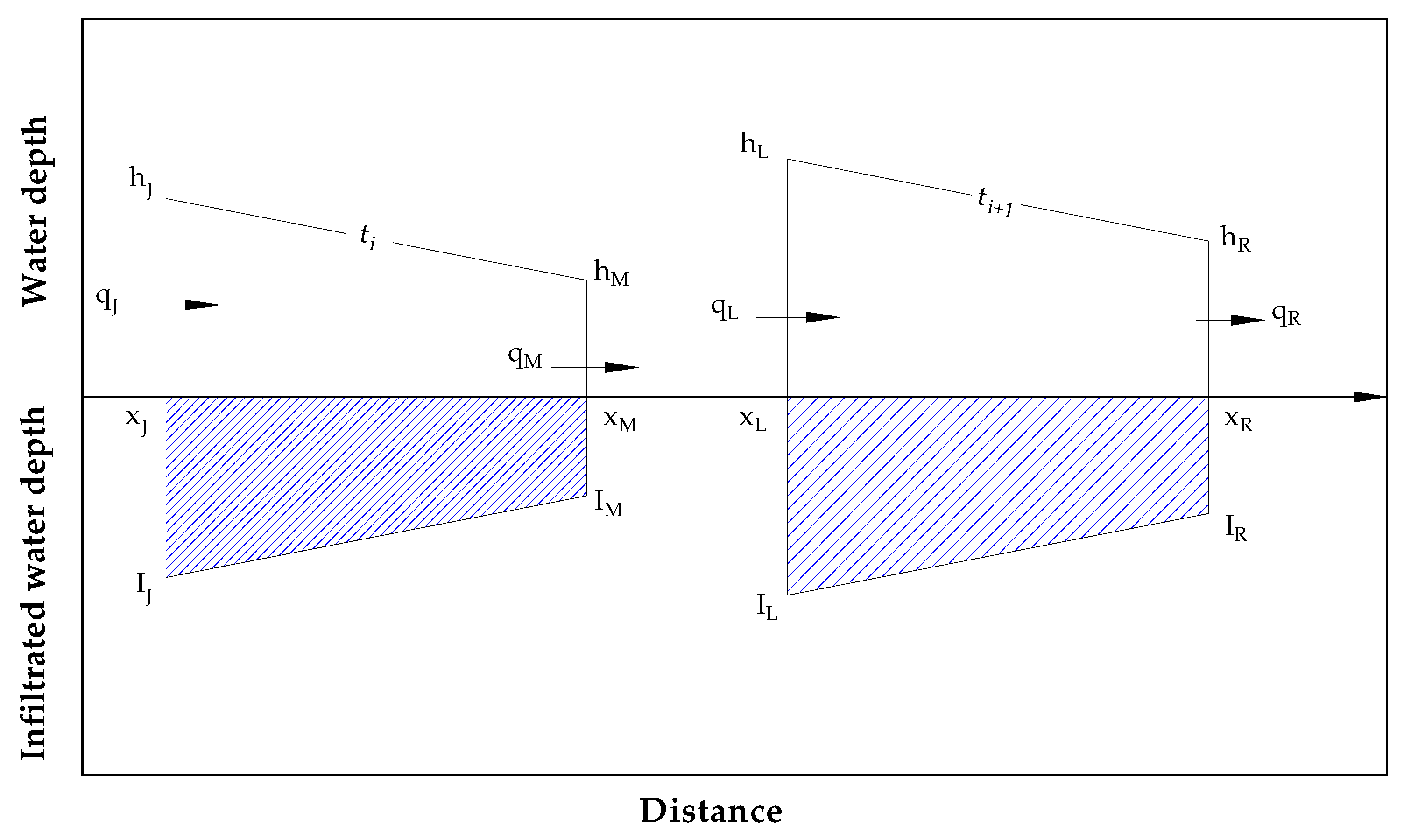
2.1. Discretization of the Saint-Venant Equation
2.2. Solution Procedure
2.3. Initial and Boundary Conditions
2.4. Analytical Representation of the Optimal Flow
3. Results
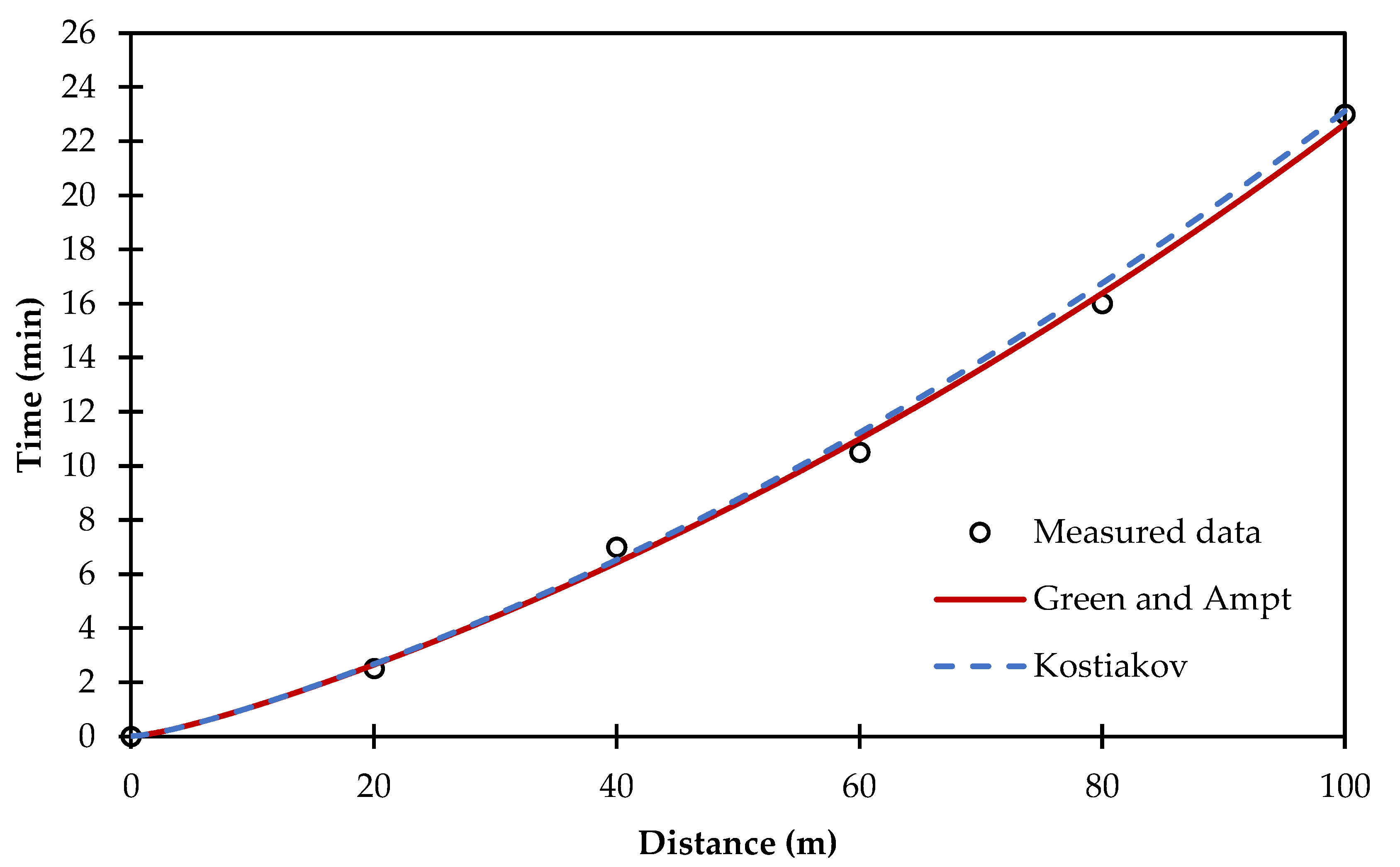
3.1. Experimental Data
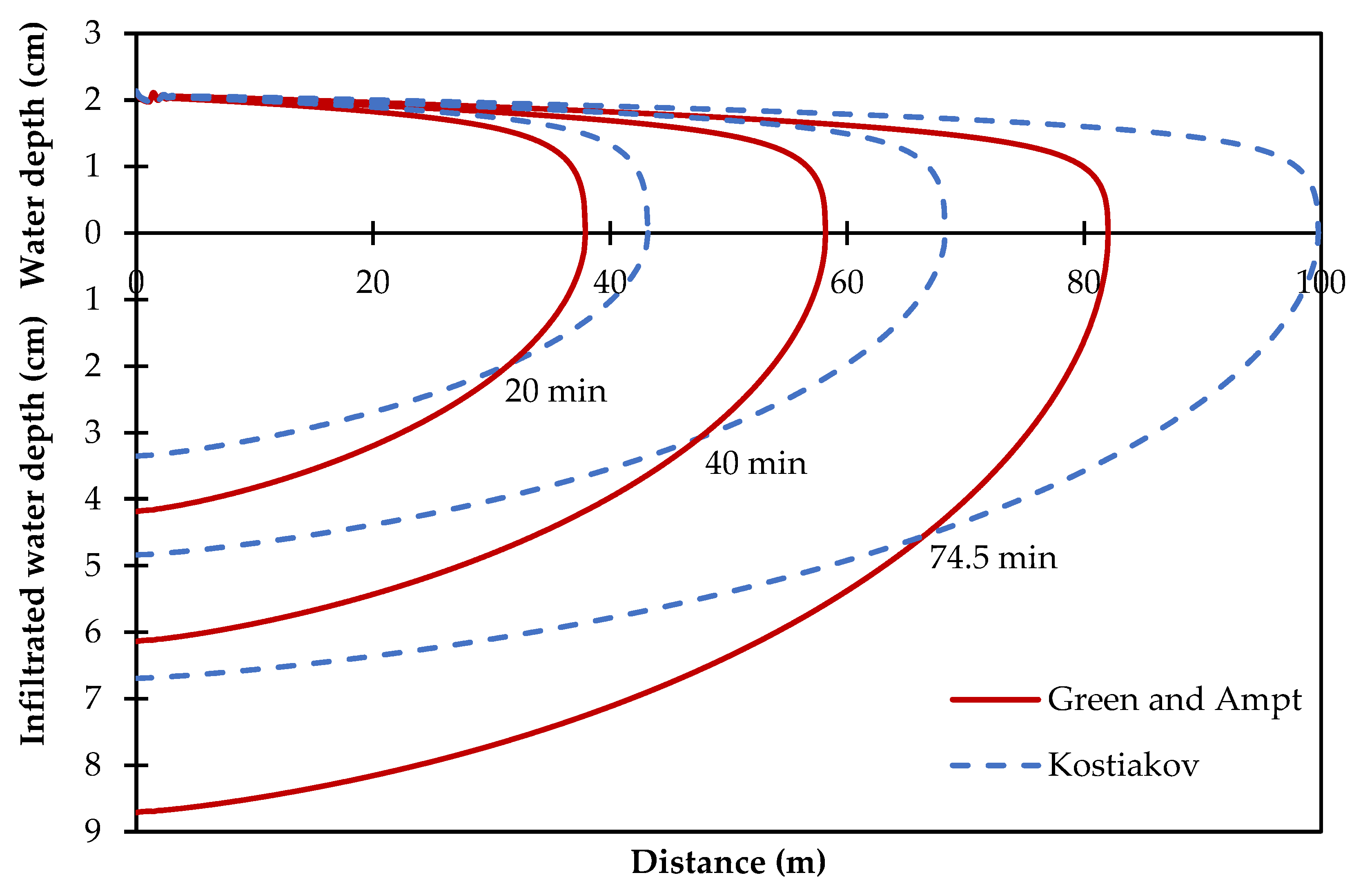
3.2. Second Irrigation
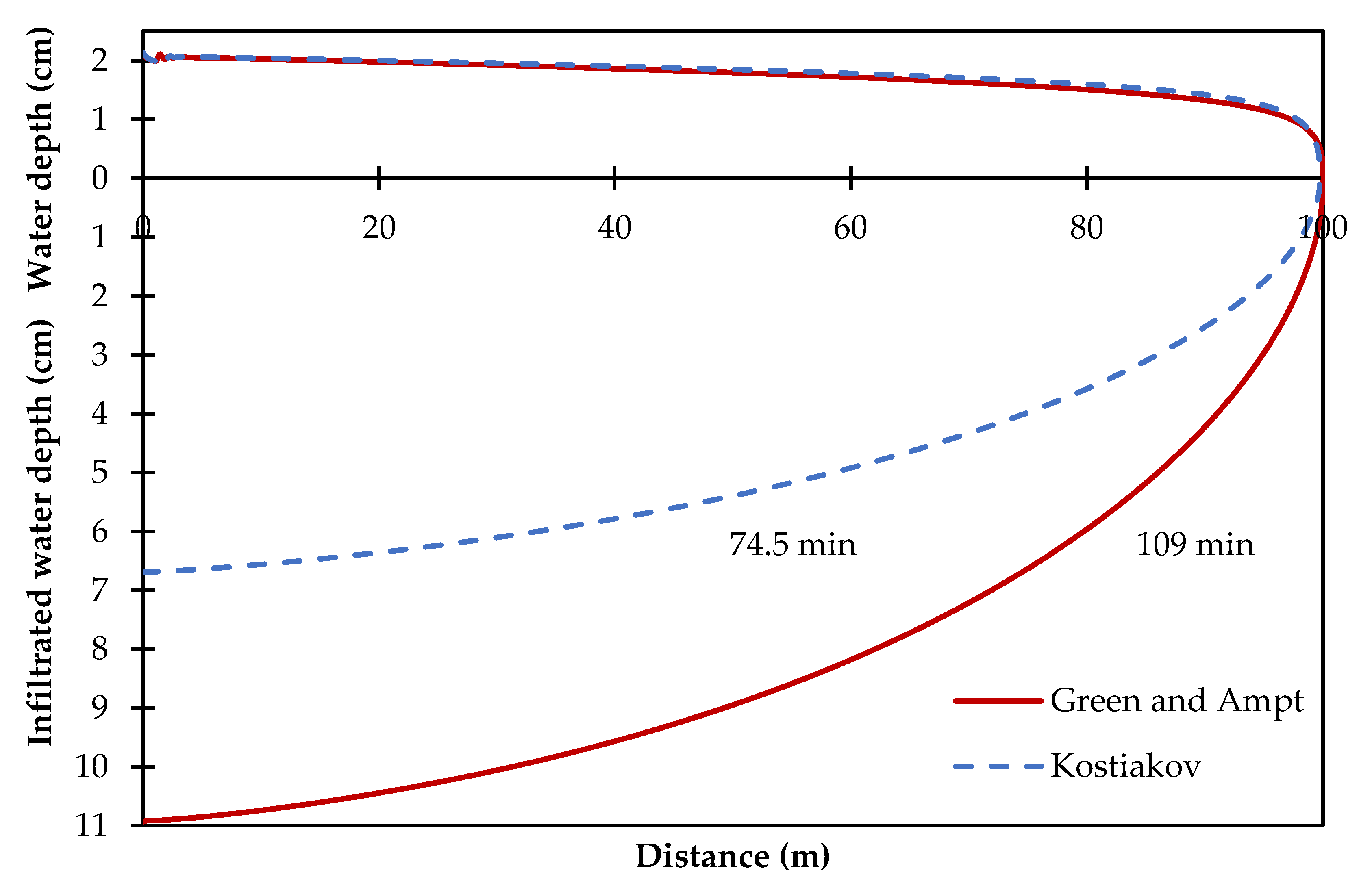
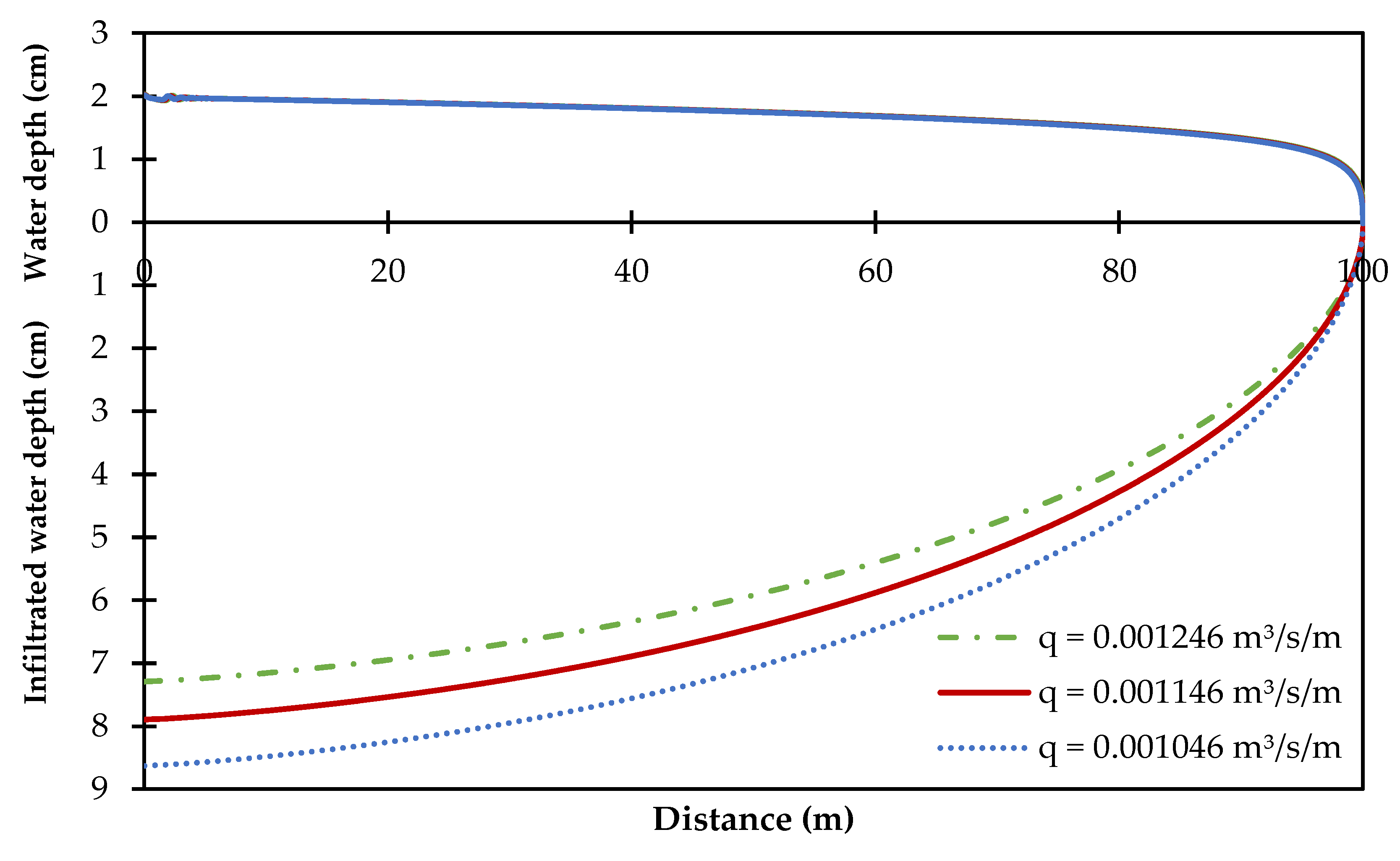
3.3. Infiltrated Water Depth with Variable Discharge
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Akbari, M.; Gheysari, M.; Mostafazadeh-Fard, B.; Shayannejad, M. Surface Irrigation Simulation-Optimization Model Based on Meta-Heuristic Algorithms. Agric. Water Manag. 2018, 201, 46–57. [Google Scholar] [CrossRef]
- Khasraghi, M.M.; Sefidkouhi, M.A.G.; Valipour, M. Simulation of Open- and Closed-End Border Irrigation Systems Using SIRMOD. Arch. Agron. Soil Sci. 2015, 61, 929–941. [Google Scholar] [CrossRef]
- Fuentes, S.; Fuentes, C.; Saucedo, H.; Chávez, C. Border Irrigation Modeling with the Barré de Saint-Venant and Green and Ampt Equations. Mathematics 2022, 10, 1039. [Google Scholar] [CrossRef]
- Golestani Kermani, S.; Sayari, S.; Kisi, O.; Zounemat-Kermani, M. Comparing Data Driven Models versus Numerical Models in Simulation of Waterfront Advance in Furrow Irrigation. Irrig. Sci. 2019, 37, 547–560. [Google Scholar] [CrossRef]
- Chávez, C.; Fuentes, C. Design and Evaluation of Surface Irrigation Systems Applying an Analytical Formula in the Irrigation District 085, La Begoña, Mexico. Agric. Water Manag. 2019, 221, 279–285. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Liaghat, A. Field Evaluation of Various Mathematical Models for Furrow and Border Irrigation Systems. Soil Water Res. 2011, 6, 91–101. [Google Scholar] [CrossRef] [Green Version]
- Adamala, S.; Raghuwanshi, N.S.; Mishra, A. Development of Surface Irrigation Systems Design and Evaluation Software (SIDES). Comput. Electron. Agric. 2014, 100, 100–109. [Google Scholar] [CrossRef]
- Walker, W.R.; Humpherys, A.S. Kinematic-Wave Furrow Irrigation Model. J. Irrig. Drain. Eng. 1983, 109, 377–392. [Google Scholar] [CrossRef]
- Gonzalez, C.J.M.; Muñoz, H.B.; Acosta, H.R.; Mailhol, J.C. Kinematic Wave Model Adapted to Irrigation with Closed-End Furrows. Agrociencia 2006, 40, 731–740. [Google Scholar]
- Strelkoff, T.; Katopodes, N.D. Border-Irrigation Hydraulics with Zero Inertia. J. Irrig. Drain. Div. 1977, 103, 325–342. [Google Scholar] [CrossRef]
- Elliott, R.L.; Walker, W.R.; Skogerboe, G.V. Zero-Inertia Modeling of Furrow Irrigation Advance. J. Irrig. Drain. Div. 1982, 108, 179–195. [Google Scholar] [CrossRef]
- Bautista, E.; Schlegel, J.L.; Clemmens, A.J. The SRFR 5 Modeling System for Surface Irrigation. J. Irrig. Drain. Eng. 2016, 142, 04015038. [Google Scholar] [CrossRef]
- Walker, W.R. SIRMOD III: Surface Irrigation Simulation, Evaluation and Design-Guide and Technical Documentation; Utah State University: Logan, UT, USA, 2003. [Google Scholar]
- Gillies, M.H.; Smith, R.J. SISCO: Surface Irrigation Simulation, Calibration and Optimisation. Irrig. Sci. 2015, 33, 339–355. [Google Scholar] [CrossRef]
- Singh, V.; Bhallamudi, S.M. Complete Hydrodynamic Border-Strip Irrigation Model. J. Irrig. Drain. Eng. 1996, 122, 189–197. [Google Scholar] [CrossRef]
- Saucedo, H.; Zavala, M.; Fuentes, C. Border irrigation design with the Saint-Venant and Green & Ampt equations. Water Technol. Sci. 2015, 6, 103–112. [Google Scholar]
- Saucedo, H.; Fuentes, C.; Zavala, M. The Saint-Venant and Richards Equation System in Surface Irrigation: (2) Numerical Coupling for the Advance Phase in Border Irrigation. Ing. Hidraul. Mex. 2005, 20, 109–119. [Google Scholar]
- Kostiakov, A.N. On the Dynamics of the Coefficient of Water Percolation in Soils and the Necessity of Studying It from the Dynamic Point of View for the Purposes of Amelioration. Trans. Sixth Comm. Int. Soc. Soil Sci. 1932, 1, 7–21. [Google Scholar]
- Green, W.H.; Ampt, G.A. Studies on Soil Physics, I: The Flow of Air and Water through Soils. J. Agric. Sci. 1911, 4, 1–24. [Google Scholar]
- Walker, W.R.; Skogerboe, G.V. Surface Irrigation. Theory and Practice; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Fuentes, S.; Chávez, C. Modeling of Border Irrigation in Soils with the Presence of a Shallow Water Table. I: The Advance Phase. Agriculture 2022, 12, 426. [Google Scholar] [CrossRef]
- Strelkoff, T. EQSWP: Extended Unsteady-Flow Double-Sweep Equation Solver. J. Hydraul. Eng. 1992, 118, 735–742. [Google Scholar] [CrossRef]
- Liu, K.; Xiong, Y.; Xu, X.; Huang, Q.; Huo, Z.; Huang, G. Modified Model for Simulating Water Flow in Furrow Irrigation. J. Irrig. Drain. Eng. 2020, 146, 06020002. [Google Scholar] [CrossRef]
- Tabuada, M.A.; Rego, Z.J.C.; Vachaud, G.; Pereira, L.S. Modelling of Furrow Irrigation. Advance with Two-Dimensional Infiltration. Agric. Water Manag. 1995, 28, 201–221. [Google Scholar] [CrossRef]
- Fuentes, C.; Chávez, C. Analytic Representation of the Optimal Flow for Gravity Irrigation. Water 2020, 12, 2710. [Google Scholar] [CrossRef]
- Moré, J.J. The Levenberg-Marquardt Algorithm: Implementation and Theory. In Numerical Analysis; Watson, G.A., Ed.; Springer: Berlin/Heidelberg, Germany, 1978; pp. 105–116. [Google Scholar]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration-Guidelines for Computing Crop Water Requirements; FAO Irrigation and Drainage Paper 56; FAO: Rome, Italy, 1998; Volume 300, p. D05109. [Google Scholar]
- Angelaki, A.; Sihag, P.; Sakellariou-Makrantonaki, M.; Tzimopoulos, C. The Effect of Sorptivity on Cumulative Infiltration. Water Supply 2021, 21, 606–614. [Google Scholar] [CrossRef]
- Stewart, R.D.; Rupp, D.E.; Najm, M.R.A.; Selker, J.S. Modeling Effect of Initial Soil Moisture on Sorptivity and Infiltration: Effect of Initial Soil Moisture on Sorptivity & Infiltration. Water Resour. Res. 2013, 49, 7037–7047. [Google Scholar] [CrossRef]
- Shayannejad, M.; Ghobadi, M.; Ostad-Ali-Askari, K. Modeling of Surface Flow and Infiltration During Surface Irrigation Advance Based on Numerical Solution of Saint–Venant Equations Using Preissmann’s Scheme. Pure Appl. Geophys. 2022, 179, 1103–1113. [Google Scholar] [CrossRef]
- Du, K.; Qiao, Y.; Zhang, Q.; Li, F.; Li, Q.; Liu, S.; Tian, C. Modeling Soil Water Content and Crop-Growth Metrics in a Wheat Field in the North China Plain Using RZWQM2. Agronomy 2021, 11, 1245. [Google Scholar] [CrossRef]
- Spiliotopoulos; Loukas Hybrid Methodology for the Estimation of Crop Coefficients Based on Satellite Imagery and Ground-Based Measurements. Water 2019, 11, 1364. [CrossRef] [Green Version]
- Muñoz, G.; Grieser, J. Climwat 2.0 for CROPWAT; Water Resources, Development and Management Service: Rome, Italy, 2006; pp. 1–5. [Google Scholar]
- Yusuf, K.O.; Ejieji, C.J.; Baiyeri, M.R. Determination of Sorptivity, Infiltration Rate and Hydraulic Conductivity of Soil Using a Tension Infiltrometer. Wildl. Environ. 2018, 10, 99–108. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil | θo (cm3/cm3) | θs (cm3/cm3) | hf (cm) | Ks (cm/h) |
|---|---|---|---|---|
| Silty loam | 0.17 | 0.55 | 30.00 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fuentes, S.; Chávez, C.; Brambila-Paz, F.; Trejo-Alonso, J. Hydrodynamic Border Irrigation Model: Comparison of Infiltration Equations. Water 2022, 14, 2111. https://doi.org/10.3390/w14132111
Fuentes S, Chávez C, Brambila-Paz F, Trejo-Alonso J. Hydrodynamic Border Irrigation Model: Comparison of Infiltration Equations. Water. 2022; 14(13):2111. https://doi.org/10.3390/w14132111
Chicago/Turabian StyleFuentes, Sebastián, Carlos Chávez, Fernando Brambila-Paz, and Josué Trejo-Alonso. 2022. "Hydrodynamic Border Irrigation Model: Comparison of Infiltration Equations" Water 14, no. 13: 2111. https://doi.org/10.3390/w14132111
APA StyleFuentes, S., Chávez, C., Brambila-Paz, F., & Trejo-Alonso, J. (2022). Hydrodynamic Border Irrigation Model: Comparison of Infiltration Equations. Water, 14(13), 2111. https://doi.org/10.3390/w14132111