

Energy Optimization Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions


Abstract
:1. Introduction
1.1. Fundamentals and Motivations
1.2. Research Contributions
- Section 2 identifies the various issues concerning energy optimization in the underwater internet of things
- Section 3 provides the state-of-the-art contributions relevant to inducement techniques of energy optimization in the underwater internet of things, i.e., it provides a systematic literature review (SLR) on various power-saving and optimization techniques of UIoT networks since 2010, along with core applications and research gaps, that include auto-recharging mechanism, wireless power transfer approach, battery-less design, AI and ML methods for power optimization, etc.
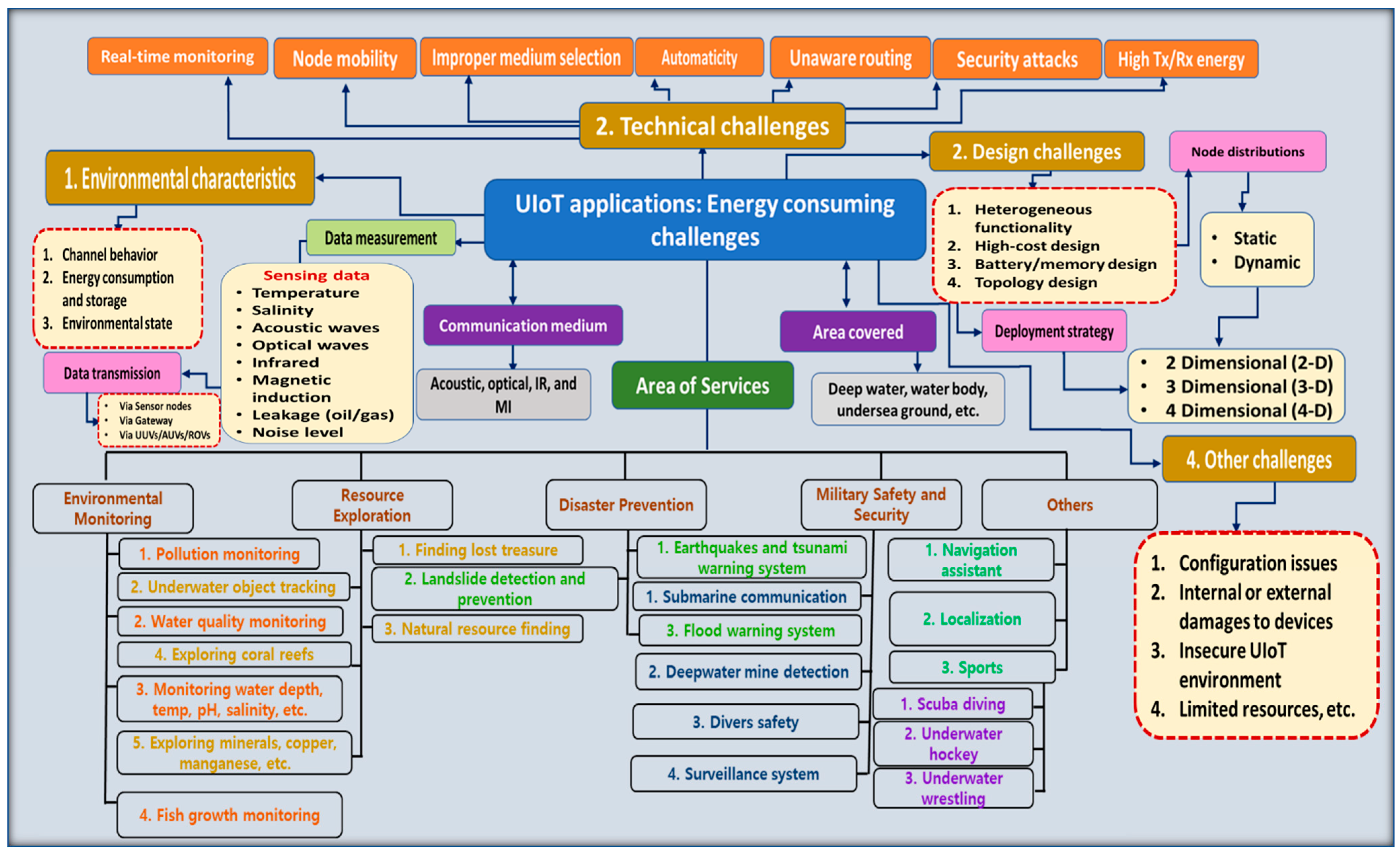
2. Energy Optimization Challenges in UIoT Networks
2.1. Environmental Characteristics
- Channel behavior: unlike terrestrial area networks, in UIoT networks, the devices are naturally interconnected through acoustic, visible light, infrared, radiofrequency, and magnetic induction mediums [57]. In effect, this causes high battery consumption, improper medium selection, unaware routing, data loss, and increased data error rate, etc. Likewise, the performance of each medium differs in the UIoT network. For example, the optical medium is high in bandwidth but compactable for a short-range communication scheme and the acoustic medium has a narrow bandwidth but is compactable for a long-range communication scheme. Other challenges such as absorption, turbulence, and scattering also affect the communication medium in UIoT networks [58]. Furthermore, due to the lack of energy management techniques in UIoT networks, the developers find it difficult to transmit data via a different medium and to solve energy-related issues in the underwater channel [36].
- Energy consumption and storage: in UIoT networks, the sensor nodes are designed with low battery capacity, less computational power, and limited memory [59]. Moreover, the nodes consume extra energy for sensing, gathering, processing, and transmitting information. The terrestrial area networks are designed with high battery capacity and huge memory size, and also, the batteries are replaceable and rechargeable. However, in the case of UIoT networks, it is hard to replace or recharge device batteries, and also memory management becomes complex due to the constrained behavior of natural behavior. This may cause power constraints in UIoT networks.
- Environmental state: in UIoT environments, internal activities such as mammal behavior, fast waves, and external noises, etc., lead to the formation of frequent changes in UIoT network topology [60]. In effect, this may cause node damage, connectivity issues, data accuracy issues, and unaware rerouting, etc. [61]. In addition, compared with terrestrial area networks, the UIoT devices are sparsely installed in UIoT environments, and they consume high amounts of energy for data sensing and transmission.
2.2. Technical Challenges
- Node mobility: the UIoT networks are deployed with static and dynamic nodes. Most UIoT nodes move from place to place to transmit information. Due to auto-mobility settings or autonomic operation, the UIoT nodes consume high amounts of energy. This causes the easy draining of energy in UIoT nodes [62].
- Improper medium selection: in general, the UIoT devices can transmit information via different communication mediums such as acoustic, infrared (IR), visible light, radiofrequency (RF), and magnet induction (MI). Even though the UIoT networks can use a different medium for communication, the unsuitable medium selection in UIoT networks can consume more energy. This can reduce the battery lifetime of UIoT devices [35].
- Unaware routing: due to internal waves, mammals’ activity and other objects’ behaviors lead to high mobility, path loss, and routing errors, etc. [60]. The frequent changes in the position of nodes can cause rerouting. In effect, it consumes high amounts of energy for routing in UIoT networks.
- Automaticity: in UIoT networks, the sensor nodes and other devices, such as UW-SNodes, UUVs, and ROVs, etc., are programmed to perform their operations by themselves. This includes automatic behavior such as sensing, transmitting, moving, and rerouting, etc., which can affect the battery life of UIoT devices.
- Real-time monitoring: the UIoT applications, such as diver networks monitoring, early warning system, and object tracking, etc., are the real-time applications developed for preventing the disasters that occur in UIoT networks. Due to real-time sensing and transmission, energy consumption is very high, which reduces the battery life of UIoT devices.
- High transmitting (Tx)/receiving (Rx) energy: in UIoT networks, the transmission and receiving of the energy of acoustic and optical mediums are high. In addition, the optical medium consumes a high amount of energy even for short-range data transmission [63].
- Security attacks: the UIoT networks consist of numerous attacks, such as black-hole attacks, routing attacks, battery attacks, and Sybil attacks, etc., among which battery-oriented attacks can directly attack the battery of UIoT devices [58]. This causes energy down in UIoT nodes and reduces network lifetime.
2.3. Design Challenges
- Heterogeneous functionality: different vendors design the devices in the UIoT networks. Therefore, the behavior of each device differs in UIoT environment [64]. This causes high battery consumption.
- High-cost design: due to the complex behavior of UIoT environment, it is necessary to protect UIoT devices by designing their housing cases and fouling cleaners, etc. Therefore, the design of UIoT devices is quite expensive compared to terrestrial IoT [65].
- Battery/memory design: UIoT networks are equipped with automatically operated UIoT devices. Additionally, the particular area of UIoT network is covered with thousands of nodes. In this case, the nodes are designed with limited memory and with limited battery capacity. Therefore, the possibility of battery failure is high in UIoT networks [59].
- Topology design: as discussed in Section 2.1, the sensor nodes are sparsely deployed in UIoT networks. Additionally, as discussed in Section 2.2, auto-mobility can frequently change the position of UIoT nodes [66]. This led to difficulty in designing the topology for UIoT applications.
2.4. Other Challenges
3. State-of-the-Art Review on Energy Optimization Techniques in UIoT
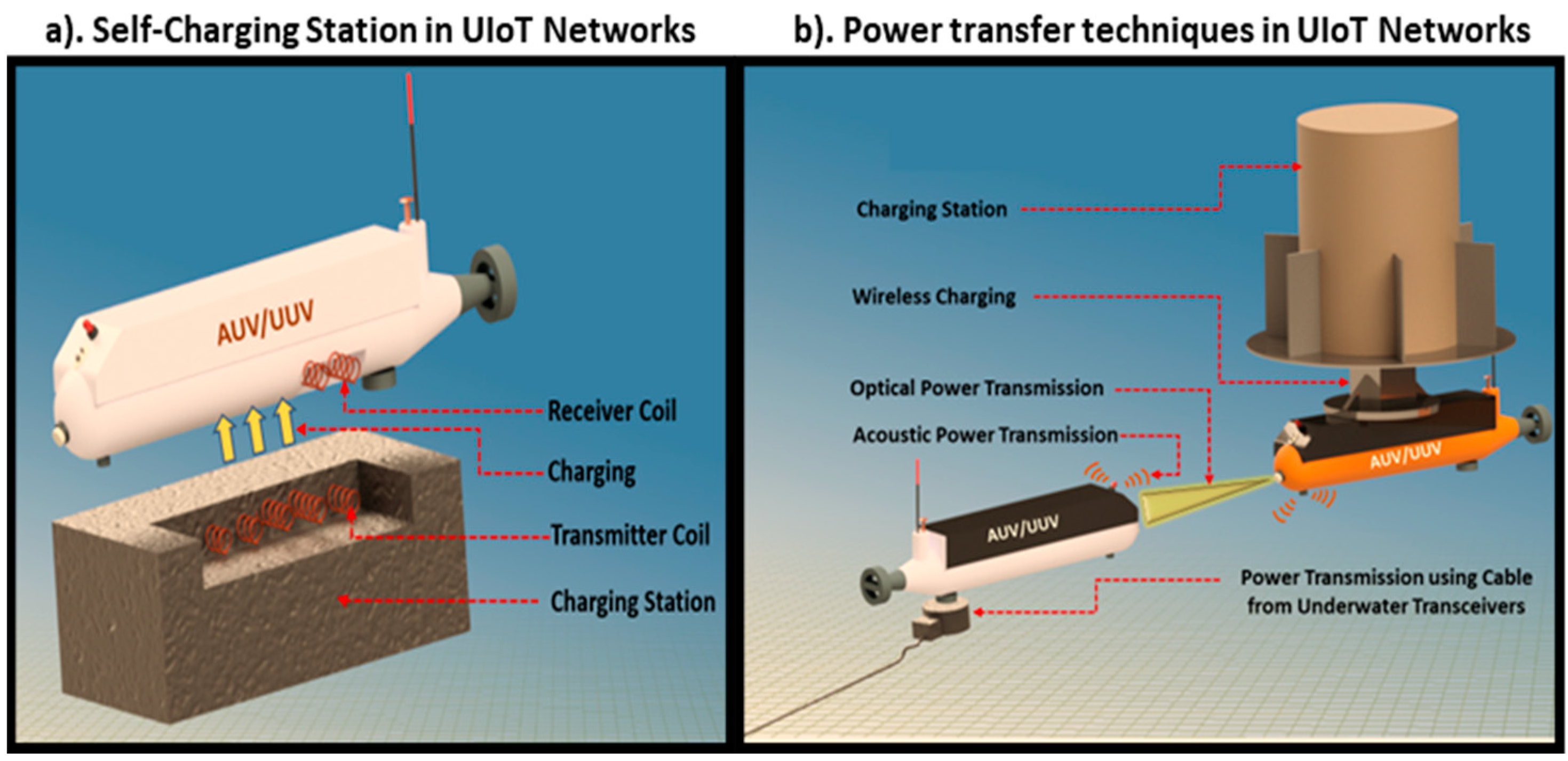
3.1. Wireless Power Transfer Techniques for UIoT
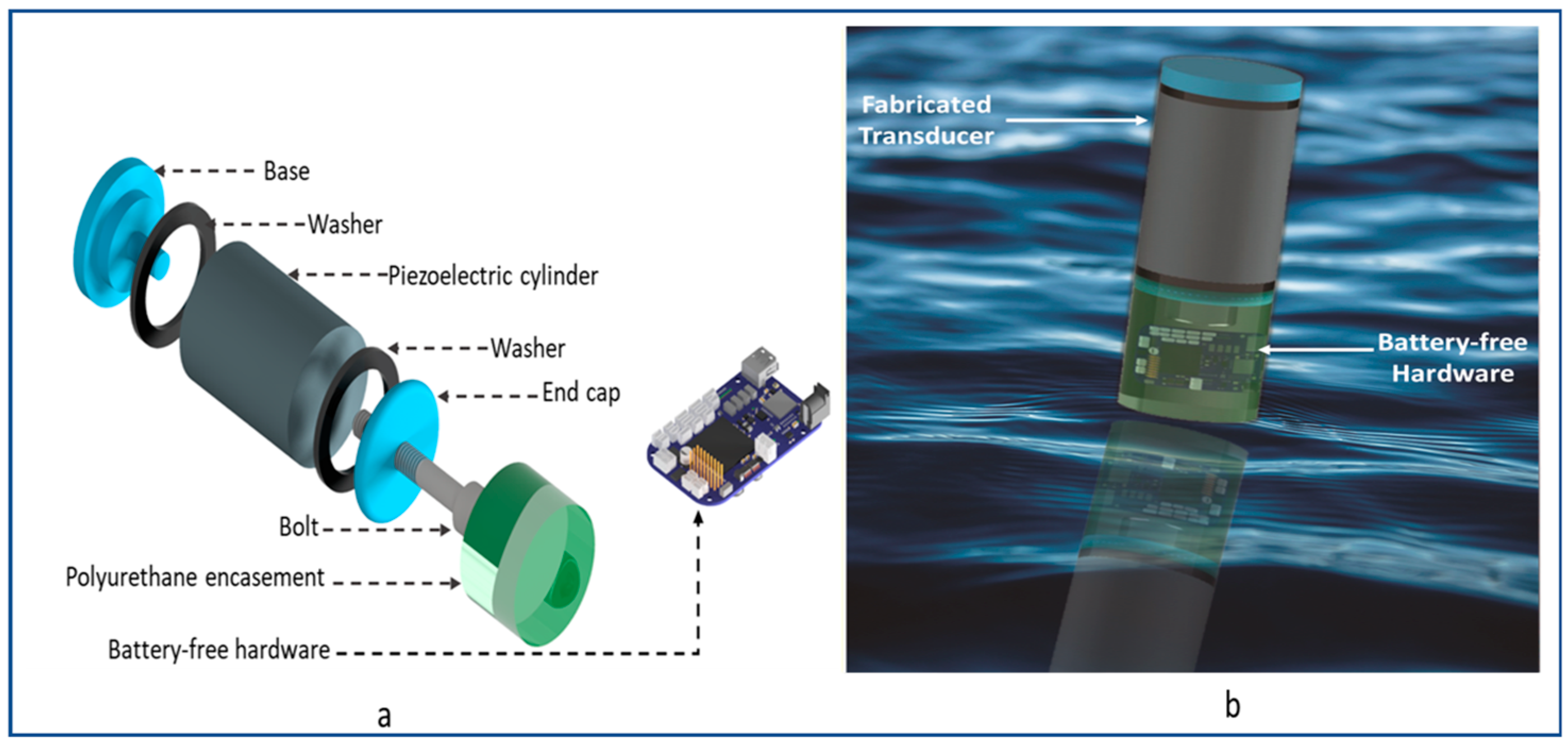
3.1.1. Underwater Acoustic Wireless Power Transfer (UA-WPT)
3.1.2. Underwater Optical Wireless Power Transfer (UO-WPT)
3.1.3. Underwater Inductive Wireless Power Transfer (UI-WPT)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Reference | Type | Application | Frequency [kHz] | Analysis and Performance Level |
|---|---|---|---|---|---|
| 2016 | Wangqiang Niu et al. [185] | Two-coiled U-WPT | Sea water and fresh water | 78 kHz and 114 kHz | Good performance in both sea and saltwater |
| 2016 | M. Urano et al. [186] | Electric Coupling | Study on electric coupling in U-WPT | 10 kHz to 1 MHz | U-WPT system needs high-speed and high-voltage switching devices. |
| 2017 | Duarte et al. [187] | Load modulation | Analysis of the voltage-mode power driver with magnetic resonance in U-WPT | 104 kHz and 111 kHz | Utilized for understanding resistive load modulation in U-WPT. |
| 2018 | Yan et al. [188] | Eddy current loss | Analysis of eddy current loss in U-WPT using different frequencies | 215.5 kHz to 248.4 kHz | Efficiency depends on an increase and decrease in misalignment. |
| 2018 | Orekan et al. [189] | Power efficiency tracking | Maximizing U-WPT system efficiency | 178 kHz | Tracking efficiency is above 85% |
| 2018 | Masaya Tamura et al. [190] | A capacitive wireless power transfer system | U-WPT system for freshwater | ≈200 kHz | Achieved efficiency of 91.3% |
| 2018 | T. Kan et al. [174] | Wireless charging system | Three-phase charging system for lightweight AUV | 465 kHz | Achieved efficiency of 92.41% |
| 2019 | Zhengchao Yan et al. [191] | A curly coil structure is used to adapt the cylindrical symmetric hull | U-WPT system for AUVs | 85 kHz | Achieved efficiency of ≈95% |
| 2019 | Canjun Yang et al. [192] | Docking system for U-WPT | Omnidirectional charging system for AUVs | ≈90 kHz | Reducing 95% of eddy’s current loss |
| 2020 | Chunwei Cai et al. [193] | Dipole-Coil magnetic coupler | Wireless charging system for AUVs | 50 kHz | Achieved efficiency of 89.7% |
| 2020 | Zhongjiu Zheng et al. [194] | Power efficiency tracking | U-WPT system for the marine vehicle | 85 kHz | Achieved a system efficiency of 88% |
3.2. Auto-Recharge/Battery-Free System for UIoT
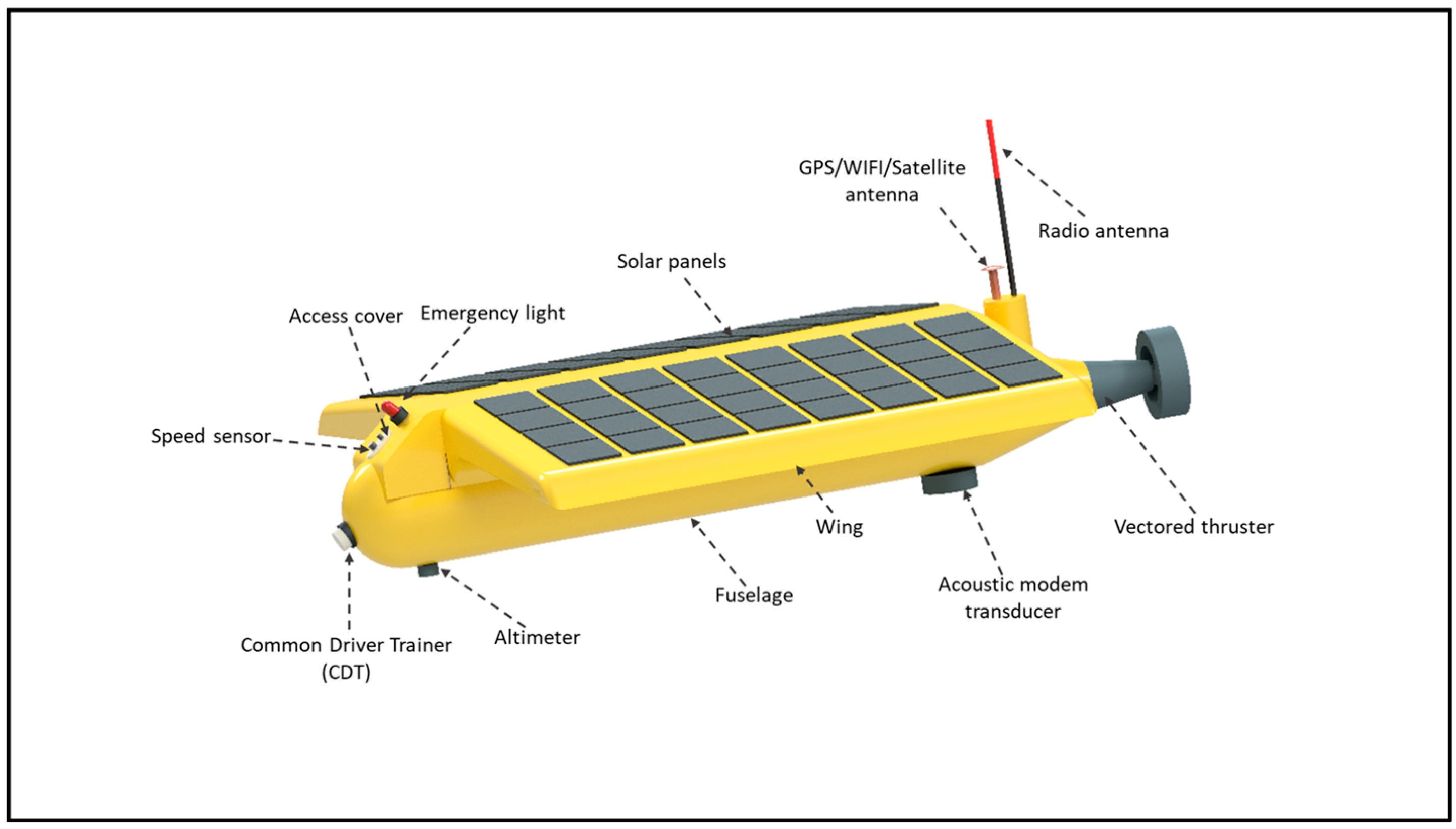
3.3. Solar Charging System for UIoT
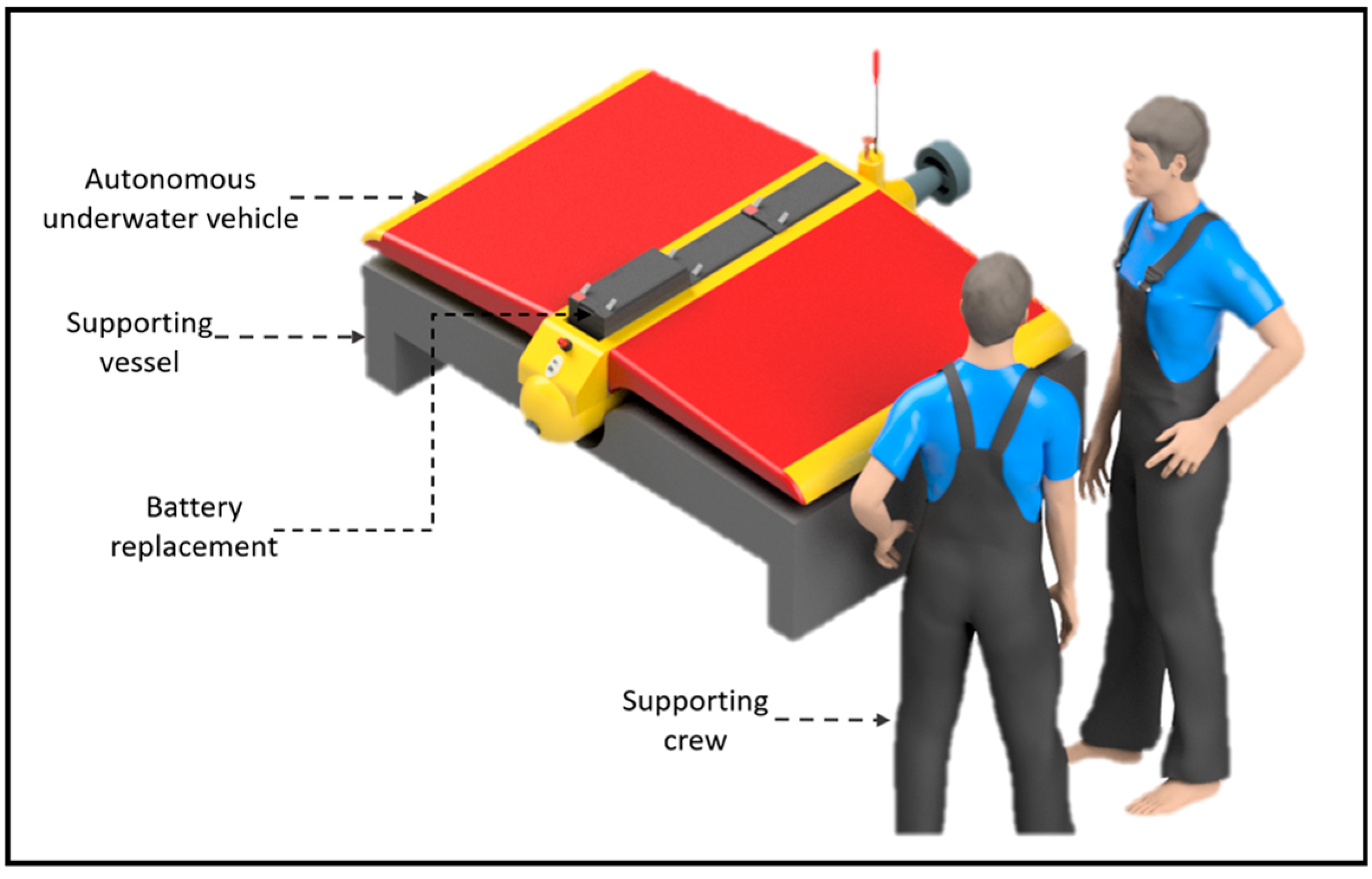
3.4. Battery Swapping Approaches in UIoT
3.5. Artificial Intelligence and Machine Learning Approaches in UIoT
3.6. Battery Management Approaches in UIoT
4. Future Directions
4.1. Build a Multi-Medium-Based Smart Energy Consumption Model
4.2. Build Auto-Recharge Power Optimization Model
4.3. Build Battery-Free Sensor Nodes/Battery-Less Platforms for UIoT Networks
4.4. Build a Smart Energy Harvesting Model Utilizing UIoT Environment
4.4.1. Recharge Using External Forces or Ultrasonic Waves Generated by Underwater Mammals
4.4.2. Recharge Using External Forces or Ultrasonic Waves Generated by Underwater Vehicles and Ships
4.4.3. Recharge Using Electric Power Generated by Seawater Species
4.4.4. Recharge Using Electric Power Generated or Transferred from UUVs/AUVS/ROVs
4.5. Build a Machine Learning (ML)-Based Battery Management System for UIoT Networks
4.6. Build Artificial Intelligence (AI)-Enabled Energy Optimization Model to Reduce Battery Consumption in UIoT Networks
4.7. Build a Standard Security Model to Reduce Unwanted Energy Consumption in UIoT Networks
4.8. Build Energy-Efficient MAC and Routing Protocols to Reduce Energy Consumption in UIoT Networks
4.8.1. Auto Device Selection in UIoT Routing Mechanism
4.8.2. Auto Mobility for Data Transfer in UIoT Routing Mechanism
4.8.3. Block Multi-Data Transfer in UIoT Routing Mechanism
4.9. Build Smart Energy Harvesting and Transfer Modules in UIoT Networks
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- NOAA, America’s Coastal & Ocean Agency. How Much Water Is in the Ocean? Available online: https://oceanservice.noaa.gov/facts/oceanwater.html (accessed on 13 July 2022).
- Ali, M.F.; Jayakody, D.N.; Chursin, Y.A.; Affes, S.; Dmitry, S. Recent Advances and Future Directions on Underwater Wireless Communications. Arch. Computat. Methods Eng. 2020, 27, 1379–1412. [Google Scholar] [CrossRef]
- Ayaz, M.; Abdullah, A.; Jung, L.T. Temporary cluster based routing for Underwater Wireless Sensor Networks. In Proceedings of the 2010 International Symposium on Information Technology, Kuala Lumpur, Malaysia, 15–17 June 2010; pp. 1009–1014. [Google Scholar] [CrossRef]
- Khasawneh, A.; Latiff, M.S.; Kaiwartya, O.; Chizari, H. A reliable energy-efficient pressure-based routing protocol for underwater wireless sensor network. Wirel. Netw. 2018, 24, 2061–2075. [Google Scholar] [CrossRef]
- Faheem, M.; Butt, R.A.; Raza, B.; Alquhayz, H.; Ashraf, M.W.; Raza, S.; Ngadi, M.A. FFRP: Dynamic Firefly Mating Optimization Inspired Energy Efficient Routing Protocol for Internet of Underwater Wireless Sensor Networks. IEEE Access 2020, 8, 39587–39604. [Google Scholar] [CrossRef]
- Shih, K.; Chen, Y.; Liu, S. A Collision Avoidance Multi-channel MAC Protocol with Physical Carrier Sensing for Mobile Ad Hoc Networks. In Proceedings of the 2010 IEEE 24th International Conference on Advanced Information Networking and Applications Workshops, Perth, Australia, 20–23 April 2010; pp. 656–661. [Google Scholar] [CrossRef]
- Alablani, I.A.; Arafah, M.A. EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks. J. Mar. Sci. Eng. 2022, 10, 488. [Google Scholar] [CrossRef]
- Rahman, J.; Alam, M.S.; Shawkat, S.A.; Hoque, M.A. BMF-MAC: A Bidirectional Multi-flow MAC Protocol for Multihop Underwater Acoustic Sensor Networks. In Proceedings of the International Conference on Underwater Networks & Systems (WUWNET’17), Halifax, NS, Canada, 6–8 November 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 1–8. [CrossRef]
- Lee, K.; Choi, J.Y.; Kwon, W.H.; Park, H.S. An Energy-efficient Contention-based MAC Protocol for Wireless Ad Hoc Networks. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; pp. 430–434. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.-J.; Wang, Y.-W.; Liao, H.-H.; Lin, C.-F.; Hu, K.W.; Chang, T.-Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft Comput. 2011, 11, 2348–2355. [Google Scholar] [CrossRef]
- Ahmad, A.; Wahid, A.; Kim, D. DAEERP: AUV aided energy efficient routing protocol for underwater acoustic sensor network. In Proceedings of the PM2HW2N’13, Barcelona, Spain, 3–8 November 2013. [Google Scholar]
- Ahmed, M.; Salleh, M.; Channa, M.I. CBE2R: Clustered-based energy efficient routing protocol for underwater wireless sensor network. Int. J. Electron. 2018, 105, 1916–1930. [Google Scholar] [CrossRef]
- Khasawneh, A.; Kaiwartya, O.; Al-Khaleel, A.; Abualigah, L.; Al Shinwan, M. RE-PBR: A Reliable Energy-Efficient Pressure-Based Routing Protocol for UWSNs. Int. J. Sci. Appl. Inf. Technol. 2020, 8, 84–91. [Google Scholar] [CrossRef]
- Rani, S.; Ahmed, S.H.; Malhotra, J.; Talwar, R. Energy efficient chain based routing protocol for underwater wireless sensor networks. J. Netw. Comput. Appl. 2017, 92, 42–50. [Google Scholar] [CrossRef]
- Wei, J. An Energy Efficient Routing Protocol Based on Layers and Unequal Clusters in Underwater Wireless Sensor Networks. J. Sens. 2018, 2018, 5835730. [Google Scholar] [CrossRef]
- Khan, W.; Wang, H.; Anwar, M.S.; Ayaz, M.; Ahmad, S.; Ullah, I. A Multi-Layer Cluster Based Energy Efficient Routing Scheme for UWSNs. IEEE Access 2019, 7, 77398–77410. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Shin, S.; Park, S. Efficiency Reservation MAC Protocol for Underwater Acoustic Sensor Networks. In Proceedings of the 2008 Fourth International Conference on Networked Computing and Advanced Information Management, Washington, DC, USA, 2–4 September 2008; pp. 365–370. [Google Scholar] [CrossRef]
- Chen, H.; Fan, G.; Xie, L.; Cui, J.H. A hybrid path-oriented code assignment CDMA-based MAC protocol for underwater acoustic sensor networks. Sensors 2013, 13, 15006–15025. [Google Scholar] [CrossRef] [Green Version]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. Graph Colouring MAC Protocol for Underwater Sensor Networks. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018; pp. 120–127. [Google Scholar] [CrossRef]
- Alfouzan, F.A.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An Energy-Conserving Collision-Free MAC Protocol for Underwater Sensor Networks. IEEE Access 2019, 7, 27155–27171. [Google Scholar] [CrossRef]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An Energy-conserving Depth-Based Layering MAC Protocol for Underwater Sensor Networks. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Bana, V.; Kerber, M.; Anderson, G.; Rockway, J.D.; Phipps, A. Underwater wireless power transfer for maritime applications. In Proceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 13–15 May 2015; pp. 1–4. [Google Scholar] [CrossRef]
- BLUEFIN ROBOTICS: Battery Swapping Approach. Available online: https://www.nauticexpo.com/pt/prod/bluefin-robotics-corporation/product-25481-304912.html (accessed on 13 July 2022).
- Guida, R.; Demirors, E.; Dave, N.; Rodowicz, J.; Melodia, T. An Acoustically Powered Battery-less Internet of Underwater Things Platform. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- MIT, Massachusetts Institute of Technology. A Battery-Free Sensor for Underwater Exploration. 2021. Available online: https://news.mit.edu/2019/battery-free-sensor-underwater-exploration-0820 (accessed on 13 July 2022).
- García-Córdova, F.; Guerrero-González, A. Intelligent navigation for a solar powered unmanned underwater vehicle. Int. J. Adv. Robot. Syst. 2013, 10, 185. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Afzal, S.S.; Akbar, W.; Rodriguez, O.; Mo, F.; Boyle, D.; Adib, F.; Haddadi, H. Towards battery-free machine learning and inference in underwater environments. In Proceedings of the 23rd Annual International Workshop on Mobile Computing Systems and Applications (HotMobile ‘22), Tempe, AZ, USA, 9–10 March 2022; Association for Computing Machinery: New York, NY, USA; pp. 29–34. [Google Scholar] [CrossRef]
- Srujana, B.S.; Mathews, P.; Harigovindan, V.P. Multi-source Energy Harvesting System for Underwater Wireless Sensor Networks. Procedia Comput. Sci. 2015, 46, 1041–1048. [Google Scholar] [CrossRef] [Green Version]
- Kesler, M.; Mccarthy, C. Highly Resonant Wireless Power Transfer in Subsea Applications; WiTricity: Watertown, MA, USA, 2013. [Google Scholar]
- Shizuno, K.; Yoshida, S.; Tanomura, M.; Hama, Y. Long distance high efficient underwater wireless charging system using dielectric-assist antenna. In Proceedings of the IEEE Oceanic Engineering Society, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–3. [Google Scholar]
- Pessoa, L.M.; Pereira, M.R.; Santos, H.M.; Salgado, H.M. Simulation and experimental evaluation of a resonant magnetic wireless power transfer system for seawater operation. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Tomoyoshi, K.; Sato, F.; Matsuki, H.; Sato, T. Automatic power supply system to underwater vehicles utilizing non contacting technology. In Proceedings of the IEEE Oceanic Engineering Society, Kobe, Japan, 9–12 November 2004; pp. 2341–2345. [Google Scholar]
- Shi, J.-G.; Li, D.-J.; Yang, C.-J. Design and analysis of an underwater inductive coupling power transfer system for autonomous underwater vehicle docking applications. J. Zhejiang Univ. Sci. C 2014, 15, 51–62. [Google Scholar] [CrossRef]
- Li, Z.-S.; Li, D.-J.; Lin, L.; Chen, Y. Design considerations for electromagnetic couplers in contactless power transmission systems for deep-sea applications. J. Zhejiang Univ. Sci. C 2010, 11, 824–834. [Google Scholar] [CrossRef]
- Delphin Raj, K.M.; Yum, S.-H.; Ko, E.; Shin, S.-Y.; Namgung, J.-I.; Park, S.-H. Multi-Media and Multi-Band Based Adaptation Layer Techniques for Underwater Sensor Networks. Appl. Sci. 2019, 9, 3187. [Google Scholar]
- Ko, E.; KM, D.R.; Yum, S.H.; Shin, S.Y.; Namgung, J.I.; Park, S.H. Selection Mechanism for Underwater Multi-Media Communication. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 16–18 October 2019; pp. 130–132. [Google Scholar] [CrossRef]
- Kim, Y.; Varzi, A.; Mariani, A.; Kim, G.; Kim, Y.; Passerini, S. Redox-Mediated Red-Phosphorous Semi-Liquid Anode Enabling Metal-Free Rechargeable Na-Seawater Batteries with High Energy Density. Adv. Energy Mater. 2021, 11, 2102061. [Google Scholar] [CrossRef]
- Kim, Y.; Hwang, S.M.; Yu, H.; Kim, Y. High energy density rechargeable metal-free seawater batteries: A phosphorus/carbon composite as a promising anode material. J. Mater. Chem. 2018, 6, 3046–3054. [Google Scholar] [CrossRef]
- Son, M.; Park, S.; Kim, N.; Angeles, A.T.; Kim, Y.; Cho, K.H. Simultaneous Energy Storage and Seawater Desalination using Rechargeable Seawater Battery: Feasibility and Future Directions. Adv. Sci. 2021, 8, 2101289. [Google Scholar] [CrossRef]
- Cho, J.; Kim, M.W.; Kim, Y.; Park, J.-S.; Lee, D.-H.; Kim, Y.; Kim, J.J. Seawater Battery-Based Wireless Marine Buoy System with Battery Degradation Prediction and Multiple Power Optimization Capabilities. IEEE Access 2021, 9, 104104–104114. [Google Scholar] [CrossRef]
- Thomas, J.K.; Crasta, H.; Kausthubha, K.; Gowda, C.; Rao, A. Battery monitoring system using machine learning. J. Energy Storage 2021, 40, 102741. [Google Scholar] [CrossRef]
- Ardeshiri, R.R.; Balagopal, B.; Alsabbagh, A.; Ma, C.; Chow, M.-Y. Machine Learning Approaches in Battery Management Systems: State of the Art: Remaining useful life and fault detection. In Proceedings of the 2020 2nd IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Cagliari, Italy, 1–3 September 2020; pp. 61–66. [Google Scholar] [CrossRef]
- Tomazzoli, C.; Scannapieco, S.; Cristani, M. Internet of Things and artificial intelligence enable energy efficiency. J. Ambient Intell. Humaniz. Comput. 2020, 13, 1–22. [Google Scholar] [CrossRef]
- Pasupathi, S.; Vimal, S.; Harold-Robinson, Y.; Khari, M.; Verdú, E.; Crespo, R.G. Energy Efficiency Maximization Algorithm for Underwater Mobile Sensor Networks. Earth Sci. Inform. 2021, 14, 215–225. [Google Scholar] [CrossRef]
- Yan, Z.; Song, B.; Zhang, Y.; Zhang, K.; Mao, Z.; Hu, Y. A Rotation-Free Wireless Power Transfer System with Stable Output Power and Efficiency for Autonomous Underwater Vehicles. IEEE Trans. Power Electron. 2019, 34, 4005–4008. [Google Scholar] [CrossRef]
- Saishenagha, D.; Devika, M. Wireless charging system using high power, high frequency magnetic interface for underwater electric vehicles. ARPN J. Eng. Appl. Sci. 2016, 11, 6977–6981. [Google Scholar]
- Crimmins, D.M.; Patty, C.T.; Beliard, M.A.; Baker, J.; Jalbert, J.C.; Komerska, R.J.; Chappell, S.G.; Blidberg, D.R. Long-endurance test results of the solar-powered AUV system. In Proceedings of the OCEANS Conference, Boston, MA, USA, 18–22 September 2006; pp. 1–5. [Google Scholar]
- Jalbert, J.; Baker, J.; Duchesney, J.; Pietryka, P.; Dalton, W.; Blidberg, D.R.; Chappell, S.; Nitzel, R.; Holappa, K. A solar-powered autonomous underwater vehicle. In Proceedings of the Oceans 2003, Celebrating the Past. Teaming Toward the Future (IEEE Cat. No. 03CH37492), San Diego, CA, USA, 22–26 September 2003; Volume 2. [Google Scholar]
- Zenia, N.Z.; Aseeri, M.; Ahmed, M.R.; Chowdhury, Z.I.; Kaiser, M.S. Energy-efficiency and reliability in MAC and routing protocols for underwater wireless sensor network: A survey. J. Netw. Comput. Appl. 2016, 71, 72–85. [Google Scholar] [CrossRef]
- Ahmed, M.; Salleh, M.; Channa, M.I.; Rohani, M.F. Energy efficient routing protocols for UWSN: A Review. Telkomnika 2017, 15, 212. [Google Scholar] [CrossRef] [Green Version]
- Ismail, N.; Mohd Murtadha, M. Review on energy efficient opportunistic routing protocol for underwater wireless sensor networks. KSII Trans. Internet Inf. Syst. TIIS 2018, 12, 3064–3094. [Google Scholar]
- Sahana, S.; Singh, K.; Kumar, R.; Das, S. A Review of Underwater Wireless Sensor Network Routing Protocols and Challenges. In Next-Generation Networks. Advances in Intelligent Systems and Computing; Lobiyal, D., Mansotra, V., Singh, U., Eds.; Springer: Singapore, 2018; Volume 638. [Google Scholar] [CrossRef]
- Teekaraman, Y.; Sthapit, P.; Choe, M.; Kim, K. Energy analysis on localization free routing protocols in UWSNs. Int. J. Comput. Intell. Syst. 2019, 12, 1526. [Google Scholar] [CrossRef] [Green Version]
- Guleria, K.; Verma, A.K. Comprehensive review for energy efficient hierarchical routing protocols on wireless sensor networks. Wirel. Netw. 2019, 25, 1159–1183. [Google Scholar] [CrossRef]
- Islam, K.Y.; Ahmad, I.; Habibi, D.; Waqar, A. A survey on energy efficiency in underwater wireless communications. J. Netw. Comput. Appl. 2022, 198, 103295. [Google Scholar] [CrossRef]
- Khisa, S.; Moh, S. Survey on Recent Advancements in Energy-Efficient Routing Protocols for Underwater Wireless Sensor Networks. IEEE Access 2021, 9, 55045–55062. [Google Scholar] [CrossRef]
- Yang, T.C. Characteristics of underwater acoustic communication channels in shallow water. In Proceedings of the OCEANS 2011, Santander, Spain, 6–9 June 2011; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Mary, D.R.K.; Ko, E.; Kim, S.G.; Yum, S.H.; Shin, S.Y.; Park, S.H. A Systematic Review on Recent Trends, Challenges, Privacy and Security Issues of Underwater Internet of Things. Sensors 2021, 21, 8262. [Google Scholar] [CrossRef] [PubMed]
- KM, D.R.; Lee, J.; Ko, E.; Shin, S.-Y.; Namgung, J.-I.; Yum, S.-H.; Park, S.-H. Underwater Network Management System in Internet of Underwater Things: Open Challenges, Benefits, and Feasible Solution. Electronics 2020, 9, 1142. [Google Scholar] [CrossRef]
- Misra, S.; Mondal, A.; Mondal, A. DATUM: Dynamic Topology Control for Underwater Wireless Multimedia Sensor Networks. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Luo, J.; Yang, Y.; Wang, Z.; Chen, Y.; Wu, M. A Mobility-Assisted Localization Algorithm for Three-Dimensional Large-Scale UWSNs. Sensors 2020, 20, 4293. [Google Scholar] [CrossRef]
- Raj, M.K.; Yum, S.-H.; Lee, J.; Ko, E.; Shin, S.-Y.; Park, S.-H. Handover Mechanism Based on Underwater Hybrid Soft-ware-Defined Modem in Advanced Diver Networks. CMC-Comput. Mater. Contin. 2022, 70, 5721–5743. [Google Scholar]
- Cao, J.; Dou, J.; Dong, S. Balance Transmission Mechanism in Underwater Acoustic Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 429340. [Google Scholar] [CrossRef]
- Hughes, D.T.; Arjan, V. Heterogeneous Underwater Networks for ASW: Technology and Techniques; NATO Undersea Research Centre: La Spezia, Italy, 2008. [Google Scholar]
- Bin Abbas, W.; Ahmed, N.; Usama, C.; Syed, A.A. Design and evaluation of a low-cost, DIY-inspired, underwater platform to promote experimental research in UWSN. Ad Hoc Netw. 2015, 34, 239–251. [Google Scholar] [CrossRef]
- He, M.; Liu, F.; Miao, Z.; Zhou, H.; Chen, Q. A mechanism of topology optimization for underwater acoustic sensor networks based on autonomous underwater vehicles. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147716686979. [Google Scholar] [CrossRef] [Green Version]
- Islam, J.; Ho, M.; Sattar, J. Dynamic Reconfiguration of Mission Parameters in Underwater Human-Robot Collaboration. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Furno, L.; Blanke, M.; Galeazzi, R.; Christensen, D.J. Self-reconfiguration of modular underwater robots using an energy heuristic. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6277–6284. [Google Scholar]
- Qiao, G.; Liu, S.; Sun, Z.; Zhou, F. Full-duplex, multi-user and parameter reconfigurable under-water acoustic communication modem. In Proceedings of the 2013 OCEANS—San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–8. [Google Scholar]
- Huynh, T.; Khatib, M.; Haick, H. Self-Healable Materials for Underwater Applications. Adv. Mater. Technol. 2019, 4, 1900081. [Google Scholar] [CrossRef]
- Elhanafi, A.; Macfarlane, G.; Fleming, A.; Leong, Z. Experimental and numerical investigations on the intact and damage survivability of a floating–moored oscillating water column device. Appl. Ocean Res. 2017, 68, 276–292. [Google Scholar] [CrossRef]
- Xu, L.; Huang, Z.; Deng, Z.; Du, Z.; Sun, T.L.; Guo, Z.; Yue, K. A Transparent, Highly Stretchable, Solvent-Resistant, Recyclable Multifunctional Ionogel with Underwater Self-Healing and Adhesion for Reliable Strain Sensors. Adv. Mater. 2021, 33, 2105306. [Google Scholar] [CrossRef]
- Von Bleichert, P. Port Security: The Terrorist Naval Mine/Underwater Improvised Explosive Device Threat. Ph.D. Thesis, Public Policy and Administration, Walden University, Washington, DC, USA, 2015. [Google Scholar]
- Khatib, M.; Zohar, O.; Haick, H. Self-healing soft sensors: From material design to implementation. Adv. Mater. 2021, 11, 2004190. [Google Scholar] [CrossRef]
- Khatib, M.; Zohar, O.; Saliba, W.; Haick, H. A Multifunctional Electronic Skin Empowered with Damage Mapping and Autonomic Acceleration of Self-Healing in Designated Locations. Adv. Mater. 2020, 32, 2000246. [Google Scholar] [CrossRef]
- Lopez, A.B.; Vatanparvar, K.; Nath, A.P.D.; Yang, S.; Bhunia, S.; Al Faruque, M.A. A Security Perspective on Battery Systems of the Internet of Things. J. Hardw. Syst. Secur. 2017, 1, 188–199. [Google Scholar] [CrossRef]
- Lloyd, T.P.; Turnock, S.R.; Humphrey, V.F. Modelling techniques for underwater noise generated by tidal turbines in shallow wa- ters. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 777–785. [Google Scholar]
- Wang, C.; Yu, H.-Y.; Zhu, Y.-J.; Wang, T. Blind Detection for SPAD-Based Underwater VLC System Under P–G Mixed Noise Model. IEEE Commun. Lett. 2017, 21, 2602–2605. [Google Scholar] [CrossRef]
- Merchant, N.D.; Brookes, K.L.; Faulkner, R.; Bicknell, A.W.J.; Godley, B.J.; Witt, M. Underwater noise levels in UK waters. Sci. Rep. 2016, 6, 36942. [Google Scholar] [CrossRef]
- Bagočius, D.; Narščius, A. Simplistic underwater ambient noise modelling for shallow coastal areas: Lithuanian area of the Baltic Sea. Ocean Eng. 2018, 164, 521–528. [Google Scholar] [CrossRef]
- Bagocious, D.; Aleksas, N. Underwater noise level predictions of ammunition explosions in the shal-low area of Lithuanian Baltic Sea. Environ. Pollut. 2019, 252, 1311–1317. [Google Scholar] [CrossRef]
- Kellett, P.; Turan, O.; Incecik, A. A study of numerical ship underwater noise prediction. Ocean Eng. 2013, 66, 113–120. [Google Scholar] [CrossRef]
- Magnier, C.; Gervaise, C. Reciprocal modelling between the underwater ambient noise and the coastal maritime traffic density in the Calvi bay. Proc. Meet. Acoust. 2019, 37, 070006. [Google Scholar]
- Pennucci, G.; Jiang, Y.-M. Extracting Acoustic Source Information of Shipping Noise for Dynamic Ambient Noise Modelling. J. Shipp. Ocean. Eng. 2018, 8, 10–20. [Google Scholar]
- Jalkanen, J.-P.; Johansson, L.; Liefvendahl, M.; Bensow, R.; Sigray, P.; Östberg, M.; Karasalo, I.; Andersson, M.; Peltonen, H.; Pajala, J. Modelling of ships as a source of underwater noise. Ocean Sci. 2018, 14, 1373–1383. [Google Scholar] [CrossRef] [Green Version]
- Pan, C.; Jia, L.; Cai, R.; Ding, Y. Modeling and simulation of channel for underwater communication network. Int. J. Innov. Comput. Inf. Control. 2012, 8, 2149–2156. [Google Scholar]
- Gholipour, A.; Zakeri, B.; Mafinezhad, K. Non-stationary additive noise modelling in direction-of-arrival estimation. IET Commun. 2016, 10, 2054–2059. [Google Scholar] [CrossRef]
- Roul, S.; Kumar, C.; Das, A. Ambient noise estimation in territorial waters using AIS data. Appl. Acoust. 2019, 148, 375–380. [Google Scholar] [CrossRef]
- Benson, B.; Li, Y.; Faunce, B.; Domond, K.; Kimball, D.; Schurgers, C.; Kastner, R. Design of a Low-Cost Underwater Acoustic Modem. IEEE Embed. Syst. Lett. 2010, 2, 58–61. [Google Scholar] [CrossRef] [Green Version]
- Song, Y. Underwater Acoustic Sensor Networks with Cost Efficiency for Internet of Underwater Things. IEEE Trans. Ind. Electron. 2020, 68, 1707–1716. [Google Scholar] [CrossRef]
- Benson, B.; Li, Y.; Kastner, R.; Faunce, B.; Domond, K.; Kimball, D.; Schurgers, C. Design of a low-cost, underwater acoustic modem for short-range sensor networks. In Proceedings of the OCEANS′10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010. [Google Scholar]
- Cario, G.; Casavola, A.; Lupia, M.; Rosace, C. SeaModem: A low-cost underwater acoustic modem for shallow water communication. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015. [Google Scholar]
- Mitchell, B.; Wilkening, E.; Mahmoudian, N. Low cost underwater gliders for littoral marine research. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 17–19 June 2013; pp. 1412–1417. [Google Scholar]
- Fischell, E.M.; Kroo, A.R.; O’Neill, B.W. Single-hydrophone low-cost underwater vehicle swarming. IEEE Robot. Autom. Lett. 2019, 5, 354–361. [Google Scholar] [CrossRef]
- Sanchez, A.; Blanc, S.; Yuste, P.; Serrano, J.J. A low cost and high efficient acoustic modem for underwater sensor networks. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Zia, M.Y.I.; Otero, P.; Poncela, J. Design of a low-cost modem for short-range under-water acoustic communications. Wirel. Pers. Commun. 2018, 101, 375–390. [Google Scholar] [CrossRef]
- Pinto, D.; Viana, S.S.; Nacif, L.F.M.; Vieira, M.A.M.; Vieira, A.B.; Fernandes, A.O. HydroNode: A low cost, energy efficient, multi purpose node for underwater sensor networks. In Proceedings of the 37th Annual IEEE Conference on Local Computer Networks, Clearwater Beach, FL, USA, 22–25 October 2012. [Google Scholar]
- Siregar, S.; Sani, M.I.; Kurnia, M.M.; Hasbialloh, D. Low-cost communication system for explorer-class underwater remotely operated vehicle. TELKOMNIKA Telecommun. Comput. Electron. Control. 2019, 17, 593–600. [Google Scholar] [CrossRef]
- Ji, Z.; Fu, Y.; Li, J.; Zhao, Z.; Mai, W. Photoacoustic Communication from the Air to Underwater Based on Low-Cost Passive Relays. IEEE Commun. Mag. 2021, 59, 140–143. [Google Scholar] [CrossRef]
- Shang, G.-Y.; Feng, Z.-P.; Lian, L. A low-cost testbed of underwater mobile sensing network. J. Shanghai Jiaotong Univ. Sci. 2011, 16, 502–507. [Google Scholar] [CrossRef] [Green Version]
- Waseem, M.H.; Alamzeb, M.; Mustafa, B.; Malik, F.; Shakir, M.; Jhan, M.A. Design of a low-cost underwater wireless sensor network for water quality monitoring. IETE J. Res. 2013, 59, 523–534. [Google Scholar] [CrossRef]
- Page, B.R.; Ziaeefard, S.; Pinar, A.J.; Mahmoudian, N. Highly Maneuverable Low-Cost Underwater Glider: Design and Development. IEEE Robot. Autom. Lett. 2016, 2, 344–349. [Google Scholar] [CrossRef]
- Abdillah, A.F.; Berlian, M.H.; Panduman, Y.Y.F.; Akbar, M.A.W.; Afifah, M.A.; Tjahjono, A.; Sukaridhoto, S.; Sasaki, S. Design and development of low cost coral monitoring system for shallow water based on internet of underwater things. J. Telecommun. Electron. Comput. Eng. JTEC 2017, 9, 97–101. [Google Scholar]
- Ateniese, G.; Capossele, A.; Gjanci, P.; Petrioli, C.; Spaccini, D. SecFUN: Security framework for underwater acoustic sensor networks. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–9. [Google Scholar]
- Li, H.; He, Y.; Cheng, X.; Zhu, H.; Sun, L. Security and privacy in localization for underwater sensor networks. IEEE Commun. Mag. 2015, 53, 56–62. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Guizani, M. An Attack-Resistant Trust Model Based on Multidimensional Trust Metrics in Underwater Acoustic Sensor Network. IEEE Trans. Mob. Comput. 2015, 14, 2447–2459. [Google Scholar] [CrossRef]
- Su, Y.; Ma, S.; Zhang, H.; Jin, Z.; Fu, X. A Redeemable SVM-DS Fusion-Based Trust Management Mechanism for Underwater Acoustic Sensor Networks. IEEE Sens. J. 2021, 21, 26161–26174. [Google Scholar] [CrossRef]
- Dargahi, T.; Javadi, H.H.S.; Shafiei, H. Securing underwater sensor networks against routing attacks. Wirel. Pers. Commun. 2017, 96, 2585–2602. [Google Scholar] [CrossRef]
- Han, G.; He, Y.; Jiang, J.; Wang, N.; Guizani, M.; Ansere, J.A. A Synergetic Trust Model Based on SVM in Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2019, 68, 11239–11247. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G.; Zhu, C.; Chan, S.; Rodrigues, J.J.P.C. A Trust Cloud Model for Underwater Wireless Sensor Networks. IEEE Commun. Mag. 2017, 55, 110–116. [Google Scholar] [CrossRef]
- Nie, D.; Sun, Z.; Qiao, G.; Liu, S.; Yin, Y. Kite-type passive acoustic detection system for underwater small targets. In Proceedings of the 2014 Oceans—St. John’s, St. John’s, NL, Canada, 14–19 September 2014. [Google Scholar]
- Kozhaeva, K.V.; Mustafin, F.M.; Yakupova, D.E. Methods for calculating the longitudinal stability of the pipeline and security measures in the area of underwater crossing (Russian). Neft. Khozyaystvo-Oil Ind. 2016, 2016, 102–104. [Google Scholar]
- Kim, H.; Lee, J.; Yi, O. Proposal of Piecewise Key Management Design Considering Capability of Underwater Communication Nodes. Adv. Sci. Lett. 2017, 23, 12729–12733. [Google Scholar] [CrossRef]
- Shuvo, M.D.; Firdaus, M.T. A Model for Underwater Security in Communication Using Secret Key Algorithm and Node Value. Ph.D. Thesis, Department of Computer Science and Engineering, Brac University, Dhaka, Bangladesh, 2021. [Google Scholar]
- Lal, C.; Petroccia, R.; Pelekanakis, K.; Conti, M.; Alves, J. Toward the Development of Secure Underwater Acoustic Networks. IEEE J. Ocean. Eng. 2017, 42, 1075–1087. [Google Scholar] [CrossRef]
- Silarski, M.; Hunik, D.; Smolis, M.; Tadeja, S.; Moskal, P. Design of the SABAT System for Underwater Detection of Dangerous Substances. Acta Phys. Pol. B 2016, 47, 497. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Marzani, F.; Yang, F. Demodulation of Chaos Phase Modulation Spread Spectrum Signals Using Machine Learning Methods and Its Evaluation for Underwater Acoustic Communication. Sensors 2018, 18, 4217. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q. Application of the Vibration Fiber Optic Perimeter Alarm System Based on the GPRS in the Underwater Security. Electron. Sci. Technol. 2013, 26, 33. Available online: https://en.cnki.com.cn/Article_en/CJFDTotal-DZKK201307011.htm (accessed on 13 July 2021).
- Arifeen, M.M.; Mamun, A.A.; Ahmed, T.; Kaiser, M.S.; Mahmud, M. A Blockchain-Based Scheme for Sybil Attack Detection in Underwater Wireless Sensor Networks. In Proceedings of the International Conference on Trends in Computational and Cognitive Engineering, Online, 21–22 September 2021; Springer: Singapore, 2021. [Google Scholar]
- Hyakudome, T.; Yoshida, H.; Ishibashi, S.; Sawa, T.; Nakamura, M. Development of advanced lithium-ion battery for underwater vehicle. In Proceedings of the 2011 IEEE Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 5–8 April 2011. [Google Scholar]
- Lin, M.; Li, D.; Yang, C. Design of an ICPT system for battery charging applied to underwater docking systems. Ocean Eng. 2017, 145, 373–381. [Google Scholar] [CrossRef]
- Pendergast, D.R.; DeMauro, E.P.; Fletcher, M.; Stimson, E.; Mollendorf, J.C. A rechargeable lithium-ion battery module for underwater use. J. Power Sources 2011, 196, 793–800. [Google Scholar] [CrossRef]
- Jin, L.; Huang, D.D. A slotted CSMA based reinforcement learning approach for extending the lifetime of underwater acoustic wireless sensor networks. Comput. Commun. 2013, 36, 1094–1099. [Google Scholar] [CrossRef]
- Dewan, A.; Ay, S.U.; Karim, M.N.; Beyenal, H. Alternative power sources for remote sensors: A review. J. Power Sources 2014, 245, 129–143. [Google Scholar] [CrossRef]
- Xing, G.; Chen, Y.; He, L.; Su, W.; Hou, R.; Li, W.; Zhang, C.; Chen, X. Energy Consumption in Relay Underwater Acoustic Sensor Networks for NDN. IEEE Access 2019, 7, 42694–42702. [Google Scholar] [CrossRef]
- Ahmed, G.; Zhao, X.; Fareed, M.M.S.; Fareed, M.Z. An Energy-Efficient Redundant Transmission Control Clustering Approach for Underwater Acoustic Networks. Sensors 2019, 19, 4241. [Google Scholar] [CrossRef]
- Hou, R.; He, L.; Hu, S.; Luo, J. Energy-Balanced Unequal Layering Clustering in Underwater Acoustic Sensor Networks. IEEE Access 2018, 6, 39685–39691. [Google Scholar] [CrossRef]
- Raza, W.; Ma, X.; Ali, A.; Shah, Z.A.; Mehdi, G. An implementation of partial transmit sequences to design energy efficient underwater acoustic OFDM communication system. arXiv 2020, arXiv:2007.01273. [Google Scholar]
- Wang, C.; Zhao, X.; Zhao, Z.; Xu, W.; Cui, L. Software-Defined Multimodal Underwater Wireless Sensor Network Platform Powered by Seawater Battery. In Proceedings of the China Conference on Wireless Sensor Networks, Dunhuang, China, 18–21 September 2020; Springer: Singapore, 2020. [Google Scholar]
- Nguyen, C.T.; Nguyen, M.T.; Mai, V.V.; Nguyen, C.T. Reliable Transmission for Underwater Optical Wireless Communication Networks with Energy Harvesting. In Proceedings of the 2020 IEEE Eighth International Conference on Communications and Electronics (ICCE), Phu Quoc Island, Vietnam, 13–15 January 2021. [Google Scholar]
- Jiang, J.; Han, G.; Shu, L.; Chan, S.; Wang, K. A Trust Model Based on Cloud Theory in Underwater Acoustic Sensor Networks. IEEE Trans. Ind. Inform. 2015, 13, 342–350. [Google Scholar] [CrossRef]
- Tran-Dang, H.; Kim, D.-S. Channel-aware cooperative routing in underwater acoustic sensor networks. J. Commun. Netw. 2019, 21, 33–44. [Google Scholar] [CrossRef]
- Hsu, C.-C.; Liu, H.-H.; Gomez, J.L.G.; Chou, C.-F. Delay-Sensitive Opportunistic Routing for Underwater Sensor Networks. IEEE Sens. J. 2015, 15, 6584–6591. [Google Scholar] [CrossRef]
- Li, C.; Xu, Y.; Xu, C.; An, Z.; Diao, B.; Li, X. DTMAC: A Delay Tolerant MAC Protocol for Underwater Wireless Sensor Networks. IEEE Sens. J. 2015, 16, 4137–4146. [Google Scholar] [CrossRef]
- Tran-Dang, H.; Kim, D.-S. Channel-aware energy-efficient two-hop cooperative routing protocol for underwater acoustic sensor networks. IEEE Access 2019, 7, 63181–63194. [Google Scholar] [CrossRef]
- Li, J.; Toulgoat, M.; Zhou, Y.; Lamont, L. Logical Link Control and Channel Scheduling for Multichannel Underwater Sensor Networks. ICST Trans. Mob. Commun. Appl. 2012, 12, e2. [Google Scholar] [CrossRef] [Green Version]
- Rahman, R.; Frater, M. Delay-tolerant networks (DTNs) for underwater communications. In Advances in Delay-Tolerant Networks (DTNs); Woodhead Publishing: Sawston, UK, 2015; pp. 81–103. [Google Scholar]
- Behrje, U.; Isokeit, C.; Meyer, B.; Maehle, E. A Robust Acoustic-Based Communication Principle for the Navigation of an Underwater Robot Swarm. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–5. [Google Scholar]
- Rodríguez-Molina, J.; Bilbao, S.; Martínez, B.; Frasheri, M.; Cürüklü, B. An Optimized, Data Distribution Service-Based Solution for Reliable Data Exchange Among Autonomous Underwater Vehicles. Sensors 2017, 17, 1802. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.-T.; Shen, Y.-C.; Luis, J.; Chou, C.-F. Energy-efficient OR-based MAC protocol for underwater sensor networks. In Proceedings of the SENSORS, 2014 IEEE, Valencia, Spain, 2–5 November 2014; pp. 118–121. [Google Scholar]
- Tang, L.; Liu, M.; Wang, K.-C.; Huang, Y.; Yang, F.; Zhang, D. Study of path loss and data transmission error of IEEE 802.15.4 compliant wireless sensors in small-scale manufacturing environments. Int. J. Adv. Manuf. Technol. 2012, 63, 659–669. [Google Scholar] [CrossRef]
- Zhang, Y.; Negahdaripour, S.; Li, Q. Error-resilient coding for underwater video transmission. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–7. [Google Scholar]
- Esmaiel, H.; Qasem, Z.A.H.; Sun, H.; Wang, J.; Junejo, N.U.R. Underwater Image Transmission Using Spatial Modulation Unequal Error Protection for Internet of Underwater Things. Sensors 2019, 19, 5271. [Google Scholar] [CrossRef]
- Esmaiel, H.; Jiang, D. Optimum Bit Rate for Image Transmission over Underwater Acoustic Channel. J. Electr. Electron. Eng. 2014, 2, 64. [Google Scholar] [CrossRef] [Green Version]
- El-Banna, A.A.A.; Wu, K.; ElHalawany, B.M. Opportunistic cooperative transmission for un-derwater communication based on the Water’s key physical variables. IEEE Sens. J. 2019, 20, 2792–2802. [Google Scholar] [CrossRef]
- Diamant, R.; Lampe, L. Adaptive Error-Correction Coding Scheme for Underwater Acoustic Communication Networks. IEEE J. Ocean. Eng. 2014, 40, 104–114. [Google Scholar] [CrossRef]
- Ilyas, N.; Alghamdi, T.A.; Farooq, M.N.; Mehboob, B.; Sadiq, A.H.; Qasim, U.; Khan, Z.A.; Javaid, N. AEDG: AUV-aided efficient data gathering routing protocol for underwater wireless sensor networks. Procedia Comput. Sci. 2015, 52, 568–575. [Google Scholar] [CrossRef] [Green Version]
- Wei, X.; Liu, Y.; Gao, S.; Wang, X.; Yue, H. An RNN-Based Delay-Guaranteed Monitoring Framework in Underwater Wireless Sensor Networks. IEEE Access 2019, 7, 25959–25971. [Google Scholar] [CrossRef]
- Domingo, M.C. A Distributed Energy-Aware Routing Protocol for Underwater Wireless Sensor Networks. Wirel. Pers. Commun. 2009, 57, 607–627. [Google Scholar] [CrossRef] [Green Version]
- Sher, A.; Khan, A.; Javaid, N.; Ahmed, S.H.; Aalsalem, M.Y.; Khan, W.Z. Void hole avoidance for reliable data delivery in IoT enabled underwater wireless sensor networks. Sensors 2018, 18, 3271. [Google Scholar] [CrossRef] [Green Version]
- Ilyas, N.; Akbar, M.; Ullah, R.; Khalid, M.; Arif, A.; Hafeez, A.; Qasim, U.; Khan, Z.A.; Javaid, N. SEDG: Scalable and Efficient Data Gathering Routing Protocol for Underwater WSNs. Procedia Comput. Sci. 2015, 52, 584–591. [Google Scholar] [CrossRef] [Green Version]
- Ruby, D.; Jeyachidra, J. Semaphore based data aggregation and similarity findings for underwater wireless sensor networks. Int. J. Grid High. Perform. Comput. IJGHPC 2019, 11, 59–76. [Google Scholar] [CrossRef]
- Akbar, M.; Javaid, N.; Khan, A.H.; Imran, M.; Shoaib, M.; Vasilakos, A. Efficient Data Gathering in 3D Linear Underwater Wireless Sensor Networks Using Sink Mobility. Sensors 2016, 16, 404. [Google Scholar] [CrossRef]
- Nasir, H.; Javaid, N.; Ashraf, H.; Manzoor, S.; Khan, Z.; Qasim, U.; Sher, M. CoDBR: Cooperative Depth Based Routing for Underwater Wireless Sensor Networks. In Proceedings of the 2014 Ninth International Conference on Broadband and Wireless Computing, Communication and Applications, Guangdong, China, 8–10 November 2014; pp. 52–57. [Google Scholar]
- Ali, M.; Khan, A.; Aurangzeb, K.; Ali, I.; Mahmood, H.; Halider, S.I.; Bhatti, N. CoSIM-RPO: Cooperative routing with sink mobility for reliable and persistent operation in underwater acoustic wireless sensor networks. Sensors 2019, 19, 1101. [Google Scholar] [CrossRef] [Green Version]
- Javaid, N.; Ahmad, Z.; Sher, A.; Wadud, Z.; Khan, Z.A.; Ahmed, S.H. Fair energy management with void hole avoidance in intelligent heterogeneous underwater WSNs. J. Ambient. Intell. Humaniz. Comput. 2018, 10, 4225–4241. [Google Scholar] [CrossRef]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A.; Ali, M. iAMCTD: Improved Adaptive Mobility of Courier Nodes in Threshold-Optimized DBR Protocol for Underwater Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2014, 10, 213012. [Google Scholar] [CrossRef]
- Yang, D.; Hou, B.; Tian, D. The Modeling Framework for Through-Metal-Wall Ultrasonic Power Transmission Channels Based on Piezoelectric Transducers. Math. Probl. Eng. 2019, 2019, 7353129. [Google Scholar] [CrossRef]
- Guida, R.; Demirors, E.; Dave, N.; Melodia, T. Underwater Ultrasonic Wireless Power Transfer: A Battery-Less Platform for the Internet of Underwater Things. IEEE Trans. Mob. Comput. 2022, 21, 1861–1873. [Google Scholar] [CrossRef]
- Esmaiel, H.; Qasem, Z.A.; Sun, H.; Qi, J.; Wang, J.; Gu, Y. Wireless information and power transfer for underwater acoustic time-reversed NOMA. IET Commun. 2020, 14, 3394–3403. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, T.; Geng, Y.; An, T. Underwater Wireless High-Efficiency Energy Transmission Method Based on the Ultrasonic Transducer Array. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 192–197. [Google Scholar] [CrossRef]
- Srinivasa, R.; Bayaner, A.; Rongguo, Z.; Sungyong, J.; Jin, M.; Hualiang, Z.; Hyoungsoo, K. An optical wireless power transfer system for rapid charging. In Proceedings of the 2013 Texas Symposium on Wireless and Microwave Circuits and Systems (WMCS), Waco, TX, USA, 4–5 April 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Nguyen, D.H. Optical Wireless Power Transfer for Moving Objects as A Life-Support Technology. In Proceedings of the 2020 IEEE 2nd Global Conference on Life Sciences and Technologies (LifeTech), Kyoto, Japan, 10–12 March 2020; pp. 405–408. [Google Scholar] [CrossRef]
- Kim, S.-M.; Choi, J.; Jung, H. Experimental demonstration of underwater optical wireless power transfer using a laser diode. Chin. Opt. Lett. 2018, 16, 080101. [Google Scholar]
- Sahai, A.; Graham, D. Optical wireless power transmission at long wavelengths. In Proceedings of the 2011 International Conference on Space Optical Systems and Applications (ICSOS), Santa Monica, CA, USA, 11–13 May 2011; pp. 164–170. [Google Scholar] [CrossRef]
- Nguyen, D.H.; Matsushima, T.; Qin, C.; Adachi, C. Toward Thing-to-Thing Optical Wireless Power Transfer: Metal Halide Perovskite Transceiver as an Enabler. Front. Energy Res. 2021, 9, 679125. [Google Scholar] [CrossRef]
- Zhang, Q.; Fang, W.; Liu, Q.; Wu, J.; Xia, P.; Yang, L. Distributed laser charging: A wireless power transfer approach. IEEE Internet Things J. 2018, 5, 3853–3864. [Google Scholar] [CrossRef] [Green Version]
- Putra, A.W.S.; Hirotaka, K.; Takeo, M. Hybrid optical wireless power and data transmission system. In Proceedings of the 2020 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Seoul, Korea, 15–19 November 2020. [Google Scholar]
- Putra, A.W.S.; Motoharu, T.; Takeo, M. Optical wireless power transmission using Si photovoltaic through air, water, and skin. IEEE Photonics Technol. Lett. 2018, 31, 157–160. [Google Scholar] [CrossRef]
- Nguyen, D.H.; Tumen-Ulzii, G.; Matsushima, T.; Adachi, C. Performance Analysis of a Perovskite-Based Thing-to-Thing Optical Wireless Power Transfer System. IEEE Photonics J. 2022, 14, 6213208. [Google Scholar] [CrossRef]
- Ye, K.; Cong, Z.; Fang, Y. Dual-Hop Underwater Optical Wireless Communication System with Simultaneous Lightwave Information and Power Transfer. IEEE Photonics J. 2021, 13, 7300107. [Google Scholar] [CrossRef]
- Xu, P.; Zhang, W.; Zuyuan He, Z. Light field optimization for optical wireless power transfer. IEEE Photonics J. 2020, 13, 1–9. [Google Scholar] [CrossRef]
- Haibing, W.; Kehan, Z.; Zhengchao, Y.; Baowei, S. Comparison of two electromagnetic couplers in an inductive power transfer system for autonomous underwater vehicle docking application. In Proceedings of the OCEANS Conference, Washington, DC, USA, 15–16 September 2016; pp. 1–5. [Google Scholar]
- Kan, T.; Mai, R.; Mercier, P.P.; Mi, C. Design and analysis of a three- phase wireless charging system for lightweight autonomous underwater vehicles. IEEE Trans. Power Electron. 2018, 33, 6622–6632. [Google Scholar] [CrossRef]
- Hayslett, T.M.; Orekan, T.; Zhang, P. Underwater wireless power transfer for ocean system applications. In Proceedings of the OCEANS 2016 MTS/IEEE, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, S.; Song, B.; Duan, G.; Du, X. Automatic wireless power supply system to autonomous underwater vehicles by means of electromagnetic coupler. J. Shanghai Jiaotong Univ. 2014, 19, 110–114. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, K.; Wen, H.; Song, B. Research on characteristics of contactless power transmission device for autonomous underwater vehicle. In Proceedings of the OCEANS Conference, Washington, DC, USA, 15–16 September 2016; pp. 1–5. [Google Scholar]
- Ogihara, M.; Ebihara, T.; Mizutani, K.; Wakatsuki, N. Wireless power and data transfer system for station-based autonomous underwater vehicles. In Proceedings of the OCEANS 2015—MTS/IEEE, Washington, DC, USA, 19–22 October 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Gao, Q.; Wu, X.; Liu, J.; Yang, Z. Modeling and simulation of contact- less power transformers for underwater application. In Proceedings of the International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1213–1217. [Google Scholar]
- Manikandan, J.; Vishwanath, A.; Agrawal, V.K.; Korulla, M. Indigenous design and development of underwater wireless power transfer system. In Proceedings of the 2016 Twenty Second National Conference on Communication (NCC), Guwahati, India, 4–6 March 2016. [Google Scholar]
- Yoshida, S.; Tanomura, M.; Hama, Y.; Hirose, T.; Suzuki, A.; Matsui, Y.; Sogo, N.; Sato, R. Underwater wireless power transfer for non-fixed unmanned underwater vehicle in the ocean. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016. [Google Scholar]
- Zhou, J.; Li, D.; Chen, Y. Frequency selection of an inductive contactless power transmission system for ocean observing. Ocean Eng. 2013, 60, 175–185. [Google Scholar] [CrossRef]
- Cheng, Z.; Lei, Y.; Song, K.; Zhu, C. Design and Loss analysis of loosely coupled transformer for an underwater high-power inductive power transfer system. IEEE Trans. Magn. 2015, 51, 8401110. [Google Scholar]
- Granger, R.P.; Baer, C.M.; Gabriel, N.H.; Labosky, J.J.; Galford, T.C. Non-contact wet mateable connectors for power and data transmission. In Proceedings of the OCEANS Conference, San Diego, CA, USA, 23–27 September 2013; pp. 1–4. [Google Scholar]
- Niu, W.; Gu, W.; Chu, J.; Shen, A. Frequency splitting of underwater wireless power transfer. In Proceedings of the 2016 IEEE International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Nanjing, China, 16–18 May 2016; pp. 1–3. [Google Scholar] [CrossRef]
- Urano, M.; Takahashi, A. Study on underwater wireless power transfer via electric coupling. In Proceedings of the 2016 IEEE International Meeting for Future of Electron Devices, Kansai (IMFEDK), Kyoto, Japan, 23–24 June 2016; pp. 1–2. [Google Scholar] [CrossRef]
- Duarte, C.; Gonçalves, F.; Ressurreição, T.; Gomes, R.; Correia, V.; Gonçalves, R.; Santos, R. A study on load modulation for underwater wireless power transfer. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017. [Google Scholar]
- Yan, Z.; Song, B.; Zhang, K.; Wen, H.; Mao, Z.; Hu, Y. Eddy current loss analysis of underwater wireless power transfer systems with misalignments. AIP Adv. 2018, 8, 101421. [Google Scholar] [CrossRef] [Green Version]
- Orekan, T.; Zhang, P.; Shih, C. Analysis, design, and maximum power-efficiency tracking for undersea wireless power transfer. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 843–854. [Google Scholar] [CrossRef]
- Tamura, M.; Naka, Y.; Murai, K.; Nakata, T. Design of a Capacitive Wireless Power Transfer System for Operation in Fresh Water. IEEE Trans. Microw. Theory Technol. 2018, 66, 5873–5884. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, Y.; Zhang, K.; Song, B.; Mi, C. Underwater wireless power transfer system with a curly coil structure for AUVs. IET Power Electron. 2019, 12, 2559–2565. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Wang, T.; Chen, Y. Design and analysis of an omnidirectional and positioning tolerant AUV charging platform. IET Power Electron. 2019, 12, 2108–2117. [Google Scholar] [CrossRef]
- Cai, C.; Zhang, Y.; Wu, S.; Liu, J.; Zhang, Z.; Jiang, L. A Circumferential Coupled Dipole-Coil Magnetic Coupler for Autonomous Underwater Vehicles Wireless Charging Applications. IEEE Access 2020, 8, 65432–65442. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, N.; Ahmed, S. Maximum efficiency tracking control of underwater wireless power transfer system using artificial neural networks. Proceedings of the Institution of Mechanical Engineers, Part I. J. Syst. Control Eng. 2020, 235, 1819–1829. [Google Scholar]
- Yang, Z.; Zhou, S.; Zu, J.; Inman, D. High-Performance Piezoelectric Energy Harvesters and Their Applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Li, Z.; Wang, Z.L. Energy Harvesting from the Animal/Human Body for Self-Powered Electronics. Annu. Rev. Biomed. Eng. 2017, 19, 85–108. [Google Scholar] [CrossRef]
- Santana Abril, J.; Santana Sosa, G.; Sosa, J.; Bautista, T.; Montiel-Nelson, J.A. A Novel Charging Method for Underwater Batteryless Sensor Node Networks. Sensors 2021, 21, 557. [Google Scholar] [CrossRef]
- Jurdak, R.; Lopes, C.; Baldi, P. Battery Lifetime Estimation and Optimization for Underwater Sensor Networks. IEEE Sens. Netw. Oper. 2004, 2006, 397–420. [Google Scholar]
- Townsend, N.; Shenoi, A. Recharging autonomous underwater vehicles from ambient wave induced motions. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–10. [Google Scholar] [CrossRef]
- Li, H.; Tian, C.; Lu, J.; Myjak, M.J.; Martinez, J.J.; Brown, R.S.; Deng, Z.D. An Energy Harvesting Underwater Acoustic Transmitter for Aquatic Animals. Sci. Rep. 2016, 6, 33804. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Shang, J.; Luo, Z.; Tang, L.; Zhang, X.; Li, J. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energy Rev. 2012, 16, 1958–1970. [Google Scholar] [CrossRef]
- Arima, M.; Okashima, T.; Yamada, T. Development of a solar-powered underwater glider. In Proceedings of the 2011 IEEE Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 5–8 April 2011. [Google Scholar]
- Hur, D.Y.; Peraza Hernandez, E.; Galvan, E.; Hartl, D.; Malak, R. Design optimization of folding solar powered autonomous underwater vehicles using origami architecture. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017; American Society of Mechanical Engineers: New York, NY, USA, 2017; Volume 58189. [Google Scholar]
- Townsend, N.C. Self-powered autonomous underwater vehicles: Results from a gyroscopic energy scavenging prototype. IET Renew. Power Gener. 2016, 10, 1078–1086. [Google Scholar] [CrossRef] [Green Version]
- Van, T.N.; Van, P.D.; Chi, H.N.; Viet, H.T. Research, Design and Development a Model Solar Autonomous Underwater Vehicles. Int. J. 2021, 9, 1217–1223. [Google Scholar]
- Röhr, J.A.; Lipton, J.; Kong, J.; Maclean, S.A.; Taylor, A.D. Efficiency limits of underwater solar cells. Joule 2020, 4, 840–849. [Google Scholar] [CrossRef]
- Friebe, A.; Olsson, M.; Le Gallic, M.; Springett, J.L.; Dahl, K.; Waller, M. A marine research ASV utilizing wind and solar power. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017. [Google Scholar]
- Plum, F.; Labisch, S.; Dirks, J.H. SAUV-A Bio-Inspired Soft-Robotic Autonomous Underwater Vehicle. Front. Neurorobot. 2020, 14, 8. [Google Scholar] [CrossRef]
- González-Reolid, I.; Molina-Molina, J.C.; Guerrero-González, A.; Ortiz, F.J.; Alonso, D. An Autonomous Solar-Powered Marine Robotic Observatory for Permanent Monitoring of Large Areas of Shallow Water. Sensors 2018, 18, 3497. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- SAUV II. Solar Based AUU Design for UIoT Networks. Available online: https://www.defensenews.com/digital-show-dailies/euronaval/ (accessed on 13 July 2022).
- Park, S.; Jo, O. Intelligent Handover Prediction Based on Locational Priority with Zero Scanning for the Internet of Underwater Things. IEEE Access 2020, 8, 186291–186303. [Google Scholar] [CrossRef]
- Faria, C.L.; Martins, M.S.; Matos, T.; Lima, R.; Miranda, J.M.; Gonçalves, L.M. Underwater Energy Harvesting to Extend Operation Time of Submersible Sensors. Sensors 2022, 22, 1341. [Google Scholar] [CrossRef] [PubMed]
- Toma, D.M.; del Rio, J.; Carbonell-Ventura, M.; Masalles, J.M. Underwater energy harvesting system based on plucked-driven piezoelectrics. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Makled, E.A.; Yadav, A.; Dobre, O.A.; Zhao, R. Reinforcement Learning-based Energy-Efficient Power Allocation for Underwater Full-Duplex Relay Network with Energy Harvesting. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Han, M.; Duan, J.; Khairy, S.; Cai, L.X. Enabling Sustainable Underwater IoT Networks with Energy Harvesting: A Decentralized Reinforcement Learning Approach. IEEE Internet Things J. 2020, 7, 9953–9964. [Google Scholar] [CrossRef]
- Harakare, A.; Barhate, N.; Randad, N.; Varghese, A.G.; Gupta, A.; Dave, P.; Modi, S.; Shrivastava, A.; Khare, L.; Raj, S. Design of Battery Management System for an Autonomous Underwater Vehicle. In Proceedings of the OCEANS 2022, Chennai, India, 21–24 February 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Chin, C.S.; Jia, J.; Chiew, J.H.; Da Toh, W.; Gao, Z.; Zhang, C.; McCann, J. System design of underwater battery power system for marine and offshore industry. J. Energy Storage 2019, 21, 724–740. [Google Scholar] [CrossRef]
- Bradley, A.M.; Feezor, M.D.; Singh, H.; Sorrell, F.Y. Power systems for autonomous underwater vehicles. IEEE J. Ocean. Eng. 2001, 26, 526–538. [Google Scholar] [CrossRef]
- Ma, S.; Qin, J.; Xiu, X.; Wang, S. Design and performance evaluation of an underwater hybrid system of fuel cell and battery. Energy Convers. Manag. 2022, 262, 115672. [Google Scholar] [CrossRef]
- Li, B.; Mao, Z.; Song, B.; Lu, C.; Tian, W.; Zhang, B. Study on battery thermal management of autonomous underwater vehicle by bionic wave channels with liquid cooling. Int. J. Energy Res. 2021, 45, 13269–13283. [Google Scholar] [CrossRef]
- Deutsch, C.; Chiche, A.; Bhat, S.; Lagergren, C.; Lindbergh, G.; Kuttenkeuler, J. Evaluation of energy management strategies for fuel cell/battery-powered underwater vehicles against field trial data. Energy Convers. Manag. X 2022, 14, 100193. [Google Scholar] [CrossRef]
- Chiew, J.; Chin, C.S.; Toh, W.D.; Gao, Z.; Jia, J. Thermal state-of-expansion or melting of phase change material based heat sink for underwater battery power system. J. Energy Storage 2019, 26, 100956. [Google Scholar] [CrossRef]
- Borgogna, G.; Lamberti, T.; Massardo, A.F. Innovative power system for autonomous underwater vehicle. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015. [Google Scholar]
- Toh, W.D.; Xu, B.; Jia, J.; Chin, C.S.; Chiew, J.; Gao, Z. Lithium iron phosphate (LiFePO4) battery power system for deepwater emergency operation. Energy Procedia 2017, 143, 348–353. [Google Scholar] [CrossRef]
- Dolphin. Produces the Sound Wave at the Frequency Range. Available online: https://seaworld.org/animals/all-about/bottlenose-dolphin/communication/#:~:text=The%20frequency%20of%20the%20sounds,frequencies%20less%20than%2040%20kHz (accessed on 13 July 2022).
- Whales. Produces the Sound Wave at the Frequency Range. Available online: https://www.nationalgeographic.com/animals/article/151207-humpback-whales-sounds-noises-oceans-animals#:~:text=Humpback%20vocalizations%2C%20including%20the%20complex,human%20hearing%20is%2020%20hz (accessed on 13 July 2022).
- Sea Species Produce Electricity. More Than 350 Species Produce Electricity in Underwater. Available online: https://www.nationalgeographic.com/animals/article/how-wild-animals-use-electricity#:~:text=Approximately%20350%20species%20of%20fish,outlet%20its%20about%20120%20volts (accessed on 13 July 2022).
- Electric Eel. Produce Electricity up to 600 Volts. Available online: https://aqua.org/explore/animals/electric-eel#:~:text=Electrophorus%20electricus%E2%80%94everything%20about%20this,eels%20live%20in%20muddy%20waters (accessed on 13 July 2022).
- Electric Ray. Produce Electricity at the Range of 8 to 200 Volts. Available online: https://www.spotmydive.com/en/marine-life/do-you-know-the-electric-rays (accessed on 13 July 2022).










| Category | Year | Author, Reference | Protocol Type | Application and Methodology | Advantages and Limitation |
|---|---|---|---|---|---|
| Energy-efficient routing protocols | 2011 | Huang, Chenn-Jung et al. [10] | Power-efficient routing protocol |
|
|
| 2013 | Awais Ahmad et al. [11] | AUV aided energy-efficient routing protocol (AEERP) |
|
| |
| 2018 | Mukhtiar Ahmed et al. [12] | Clustered-based energy-efficient routing protocol (CBE2R) |
| ||
| 2018 | Ahmad Khasawneh et al. [13] | The reliable energy-efficient pressure-based routing protocol (RE-PBR) |
|
| |
| Others | Energy-efficient chain-based routing protocol (ECBCCP) [14], Energy-efficient routing protocol based on layers and unequal clusters (EERBLC) [15], multi-layer cluster-based energy efficient routing (MLCEE) [16], etc. | ||||
| Energy-efficient MAC protocols | 2010 | Nguyen et al. [17] | Efficiency Reservation MAC protocol (ERMAC) |
|
|
| 2013 | Huifang Chen et al. [18] | Transmitter-oriented code assignment (TOCA) |
|
| |
| 2019 | Alfouzan et al. [19] | Graph Coloring MAC Protocol (GC-MAC) |
|
| |
| Others | Energy-conserving and collision-free depth-based layering MAC (DL-MAC) [20], Depth-based Layering MAC protocol (DL-MAC) [21], etc. | ||||
| Author and Ref. | Energy-Optimization Techniques | State-of-the-Art Review | Applications/Use Cases | Routing Protocols | MAC Protocols | Technical Challenges | Communication Technologies | Research Directions | Remarks |
|---|---|---|---|---|---|---|---|---|---|
| Nusrat ZerinZenia et al. in 2016 [49] |  |  | |  | | | | | Focused on the study of energy-efficient MAC and routing protocols of underwater wireless sensor networks |
| Mukhtiar Ahmed at al. in 2017 [50] | | | | | | | | | Focused on analyzing energy-efficient routing protocols of underwater communication |
| Nasarudin Ismail et al. in 2018 [51] | | | | | |  | | | Focused on opportunistic routing for underwater acoustic communication technology |
| Sahana S et al. in 2018 [52] | | | | | | | | | Focused on the analysis of various routing protocols of underwater sensor networks, its research challenges, and provides the solutions to improve the performance on concerning issues such as propagation delay, limited battery, and node mobility, etc. |
| Yuvaraja Teekaraman et al. in 2019 [53] | | | | | | | | | Focused on the analysis of energy efficiency localization-free protocols in underwater communication |
| Kalpna Guleria et al. in 2019 [54] | | | | | | | | | Focused on building a systematic review approach of energy-efficient routing protocols from 2012 to 2017 |
| Kazi Yasin Islam et al. in 2021 [55] | | | | | | | | | Focused on the analysis of various communication technologies and power-saving techniques in physical, MAC, and routing layers of underwater wireless communication |
| Shreya Khisa et al. in 2021 [56] | | | | | | | | | Focused on analyzing numerous energy-efficient routing protocols that are presently available for underwater sensor networks, provides gap analysis, and categorizing its taxonomy |
| This paper | | | | | | | | | In this paper, energy optimization in UIoT is analyzed based on different communication technology such as acoustic, optical, IR, and MI and provides information on the state-of-the-art by showing numerous energy optimization approaches such as wireless power transfer, battery-less sensor nodes, AI and ML techniques, etc., along with its issues and future direction |
| Not Covered Full Covered Partially Covered Less Covered | |||||||||
| Years | Main Clause | Subclause | Paper Count | Reference Number |
|---|---|---|---|---|
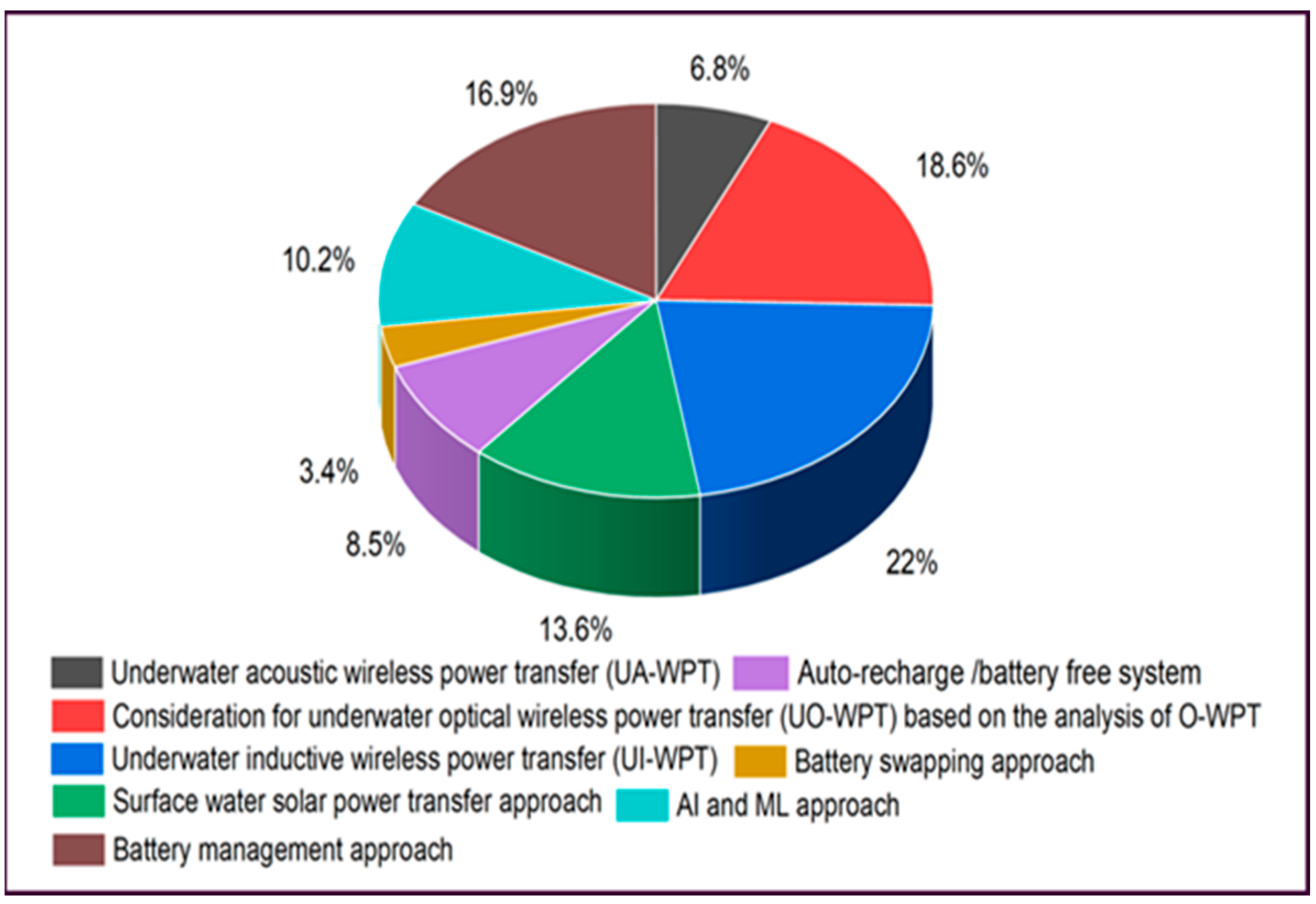
| 2010–2022 | Underwater wireless power transfer approach | Underwater acoustic wireless power transfer (UA-WPT) | 4 | [158,159,160,161] |
| Consideration for underwater optical wireless power transfer (UO-WPT) based on the analysis of O-WPT | 11 | [162,163,164,165,166,167,168,169,170,171,172] | ||
| Underwater inductive wireless power transfer (UI-WPT) | 13 | [173,174,175,176,177,178,179,180,181,182,183,184,185] | ||
| 2010–2022 | Surface water solar power transfer approach | Power transfer to AUVs/UUVs/ROVs | 10 | [202,203,204,205,206,207,208,209,210,211] |
| 2010–2022 | Auto-recharge/battery-free system | Automatic recharge of sensor nodes using water particles, self-recharging, and battery-less sensor nodes | 4 | [21,36,37,38] |
| 2010–2022 | Battery swapping approach | Replacing the battery of AUVs with another battery | 2 | [23,24] |
| 2010–2022 | AI and ML approach | Deep learning, reinforcement learning, and lightweight AI mechanism | 6 | [27,211,212,213,214,215] |
| 2010–2022 | Battery management approach | To control and optimize the performance of battery modules | 10 | [120,216,217,218,219,220,221,222,223,224] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kesari Mary, D.R.; Ko, E.; Yoon, D.J.; Shin, S.-Y.; Park, S.-H. Energy Optimization Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions. Water 2022, 14, 3240. https://doi.org/10.3390/w14203240
Kesari Mary DR, Ko E, Yoon DJ, Shin S-Y, Park S-H. Energy Optimization Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions. Water. 2022; 14(20):3240. https://doi.org/10.3390/w14203240
Chicago/Turabian StyleKesari Mary, Delphin Raj, Eunbi Ko, Dong Jin Yoon, Soo-Young Shin, and Soo-Hyun Park. 2022. "Energy Optimization Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions" Water 14, no. 20: 3240. https://doi.org/10.3390/w14203240
APA StyleKesari Mary, D. R., Ko, E., Yoon, D. J., Shin, S. -Y., & Park, S. -H. (2022). Energy Optimization Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions. Water, 14(20), 3240. https://doi.org/10.3390/w14203240