
Analysis and Design of Monopile Foundations for Offshore Wind and Tidal Turbine Structures


Abstract
:1. Introduction
1.1. Hybrid Generation from Offshore Renewable Sources
1.2. The Integration of Offshore Wind with Tidal Energy
- (a)
- Site investigation;
- (b)
- Criteria for design;
- (c)
- Evaluation of the stability of design under combined loads.
2. Environmental Parameters for Design
3. Methods
4. Results
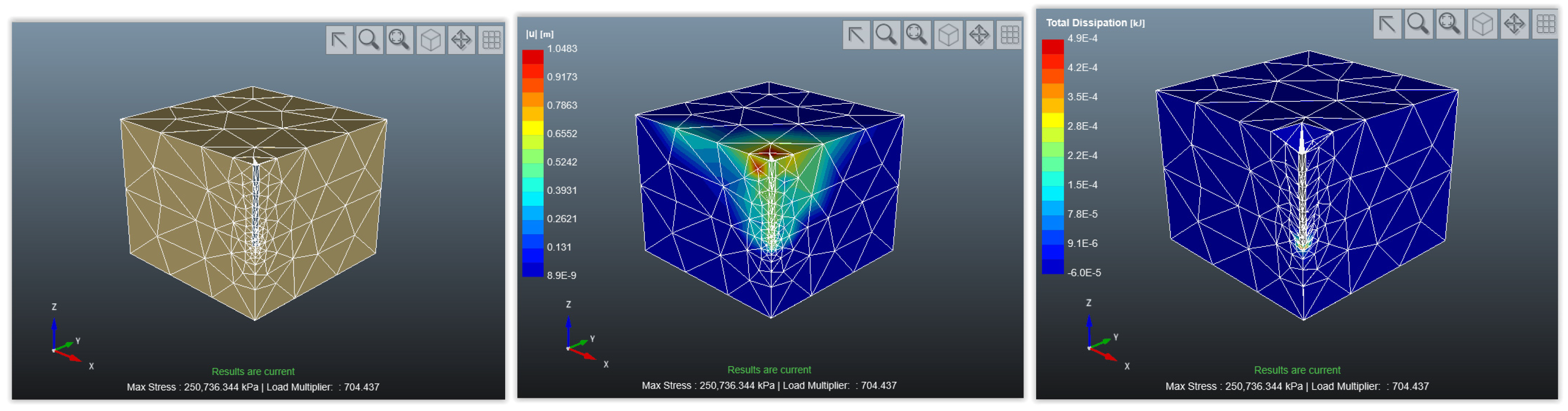
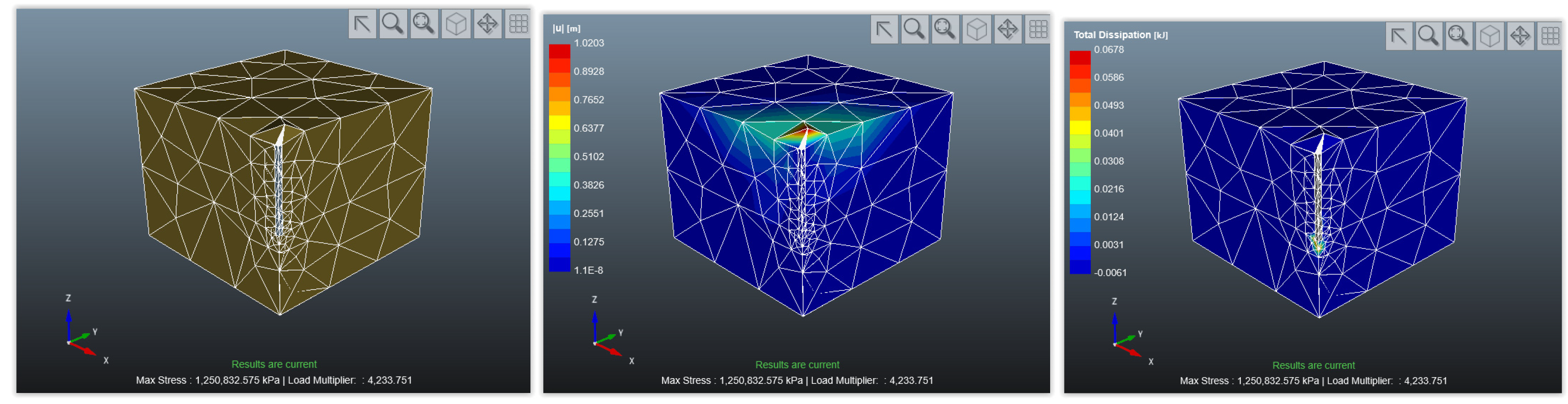
4.1. Finite Element Analysis
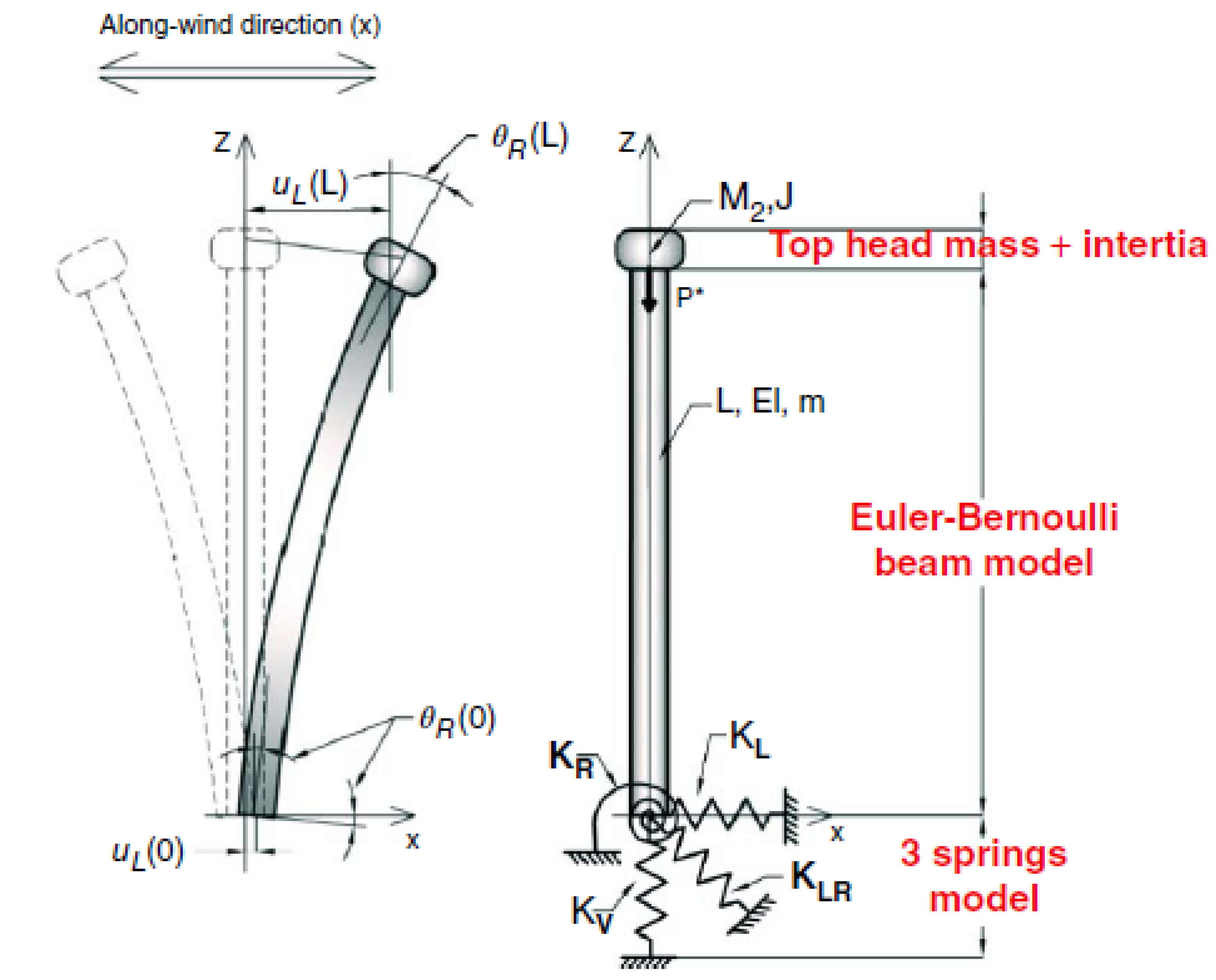
4.2. Macro-Element Model
- Steel monopile, diameter 6 m, ensures rigid behavior, as recommended by Jose and Mathai [52].
4.2.1. Wind Loads
4.2.2. Wave Loads
4.2.3. Load Combinations for Ultimate Limit State (ULS)
4.2.4. Long-Term Deflection & Rotation of the Pile Mudline Moment
5. Conclusions
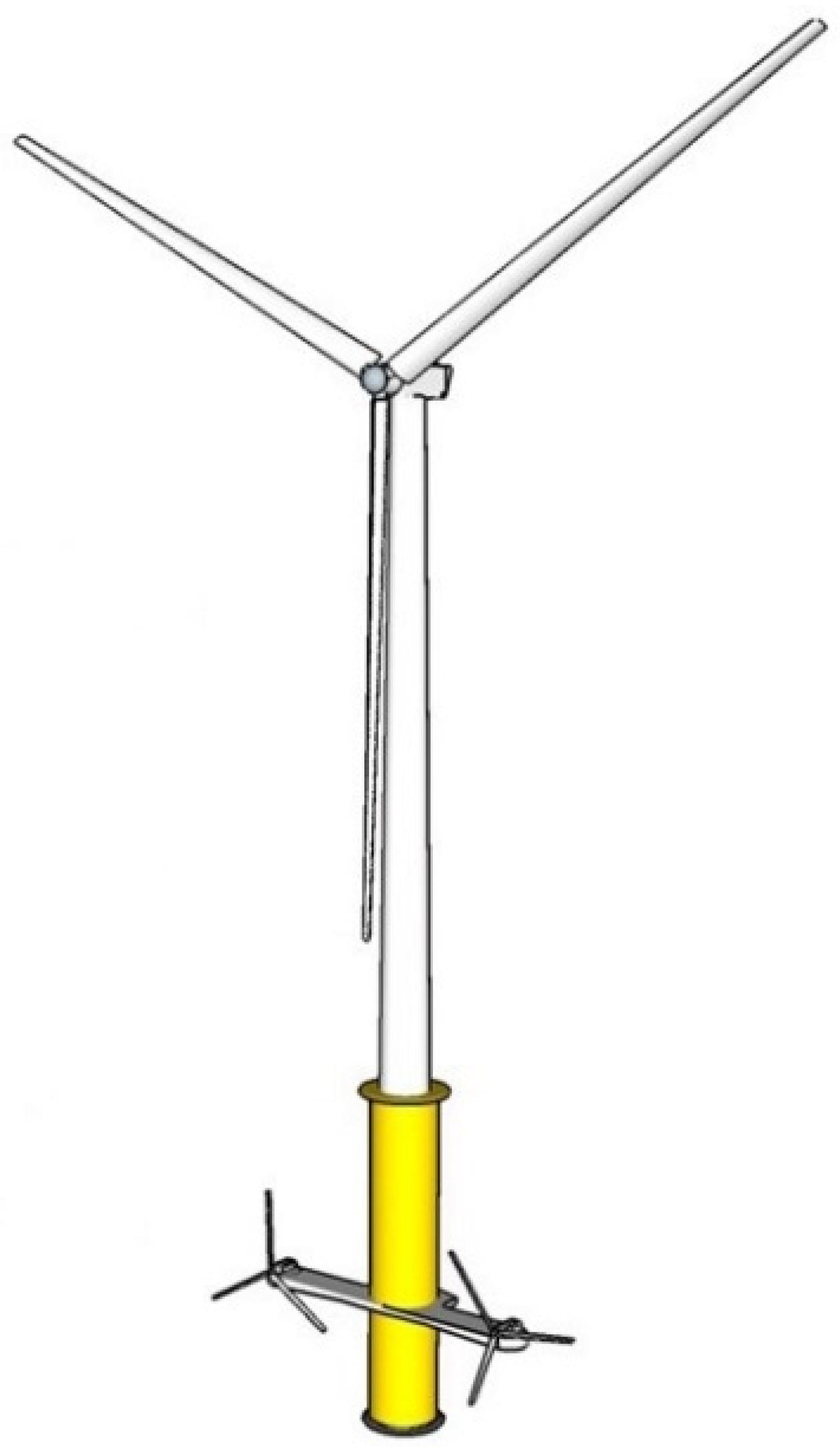
- The proposed tower is a hollow steel tube wall with a thickness of 0.027 m, 68 m high above the platform, tapering from 5 m at the base to 3 m at the top, and weighing 255 tonnes.
- The proposed transition piece is a steel tube with an internal diameter m to fit the top of the monopile, wall thickness of 0.083 m and extending 29 m below the platform level, and sheathing on top of the monopile. Weight: 300 tonnes.
- The proposed foundation is a monopile inserted into the seabed. It would be solid steel, 6 m in diameter, and 60 m long, weighing 700 tonnes. It would project above the seabed for 30 m (the upper 20 m would be inserted into the transition piece), and the lower 20 m would be placed in the seabed. The pile would be driven with a hydraulic hammer into the seabed.
- The acting loads are transferred to the foundation; they can be static depending on the total weight of the structure, which is calculated and analyzed with OPTUM G3 software, or dynamic (cyclic), which is investigated by combining wind and wave loads.
- The wind and water produce aerodynamic and hydrodynamic loads (thrust and drag) on the structure, which depend on the operational speed of turbines. However, to know the acceptability of foundation design, it is necessary to combine wind and wave loads in ULS design and calculate maximum loads and find the driven scenarios. Then, find the required dimensions of the pile and, based on the maximum load of the driven scenario, calculate deflection and check in ULS if the deflection is allowable or not.
- The combination of wind and wave loads indicates that the maximum load occurs for the E-3 scenario. Applying loads of this scenario results in acceptable deflection, tilt, and natural frequency for Terawhiti.
- Several iterations were done to reach the required pile dimensions after finding the maximum combined load for the driving scenario.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Zhao, T.; Xu, M.; Xiao, X.; Ma, Y.; Li, Z.; Wang, Z.L. Recent progress in blue energy harvesting for powering distributed sensors in ocean. Nano Energy 2021, 88, 106199. [Google Scholar] [CrossRef]
- Sarma, N.; Tuohy, P.M.; Mohammed, A.; Djurovic, S. Rotor Electrical Fault Detection in DFIGs Using Wide-Band Controller Signals. IEEE Trans. Sustain. Energy 2020, 12, 623–633. [Google Scholar] [CrossRef]
- Karumalai, D. Offshore Integrated Renewable Power System. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Washington, DC, USA, 2020. [Google Scholar]
- Pérez-Collazo, C.; Greaves, D.; Iglesias, G. A review of combined wave and offshore wind energy. Renew. Sustain. Energy Rev. 2015, 42, 141–153. [Google Scholar] [CrossRef] [Green Version]
- Christensen, E.D.; Stuiver, M.; Guanche, R.; Møhlenberg, F.; Schouten, J.J.; Pedersen, O.S.; He, W.; Zanuttigh, B.; Koundouri, P. Go Offshore-Combining Food and Energy Production; Technical University of Denmark, Department of Mechanical Engineering: Lyngby, Denmark, 2015. [Google Scholar]
- H2OCEAN. Available online: http://www.vliz.be/projects/mermaidproject/project/related-projects/h2ocean.html (accessed on 7 September 2021).
- Chen, P.; Chen, J.; Hu, Z. Review of Experimental-Numerical Methodologies and Challenges for Floating Offshore Wind Turbines. J. Mar. Sci. Appl. 2020, 19, 339–361. [Google Scholar] [CrossRef]
- Da, Y.; Khaligh, A. Hybrid offshore wind and tidal turbine energy harvesting system with independently controlled rectifiers. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009. [Google Scholar]
- Li, L.; Gao, Y.; Yuan, Z.; Day, S.; Hu, Z. Dynamic response and power production of a floating integrated wind, wave and tidal energy system. Renew. Energy 2018, 116, 412–422. [Google Scholar] [CrossRef] [Green Version]
- Lande-Sudall, D.; Stallard, T.; Stansby, P. Co-located deployment of offshore wind turbines with tidal stream turbine arrays for improved cost of electricity generation. Renew. Sustain. Energy Rev. 2019, 104, 492–503. [Google Scholar] [CrossRef]
- Nichita, C.; Ashglaf, M.; Amara, Y.; Jo, C.H. Preliminary study of a concept of wind-tidal turbine coupling using functional similarities of real time emulation. Renew. Energy Power Qual. J. Tenerife 2019, 17, 371–376. [Google Scholar] [CrossRef]
- Phurailatpam, C.; Rajpurohit, B.; Wang, L. Optimization of DC microgrid for rural applications in India. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016. [Google Scholar]
- Azaza, M.; Wallin, F. Multi objective particle swarm optimization of hybrid micro-grid system: A case study in Sweden. Energy 2017, 123, 108–118. [Google Scholar] [CrossRef]
- Thakur, D.; Jiang, J. Design and Construction of a Wind Turbine Simulator for Integration to a Microgrid with Renewable Energy Sources. Electr. Power Components Syst. 2017, 45, 949–963. [Google Scholar] [CrossRef]
- Wang, L.; Lin, C.-Y.; Wu, H.-Y.; Prokhorov, A.V. Stability Analysis of a Microgrid System With a Hybrid Offshore Wind and Ocean Energy Farm Fed to a Power Grid Through an HVDC Link. IEEE Trans. Ind. Appl. 2017, 54, 2012–2022. [Google Scholar] [CrossRef]
- Adetunji, K.E.; Akinlabi, O.A.; Joseph, M.K. Developing a microgrid for tafelkop using homer. In Proceedings of the 2018 International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Durban, South Africa, 6–7 August 2018. [Google Scholar]
- Kitson, J.; Williamson, S.; Harper, P.; McMahon, C.; Rosenberg, G.; Tierney, M.; Bell, K.; Gautam, B. Modelling of an expandable, reconfigurable, renewable DC microgrid for off-grid communities. Energy 2018, 160, 142–153. [Google Scholar] [CrossRef] [Green Version]
- Rousis, A.O.; Tzelepis, D.; Konstantelos, I.; Booth, C.; Strbac, G. Design of a Hybrid AC/DC Microgrid Using HOMER Pro: Case Study on an Islanded Residential Application. Inventions 2018, 3, 55. [Google Scholar] [CrossRef] [Green Version]
- Phurailatpam, C.; Rajpurohit, B.S.; Wang, L. Planning and optimization of autonomous DC microgrids for rural and urban applications in India. Renew. Sustain. Energy Rev. 2018, 82, 194–204. [Google Scholar] [CrossRef]
- Faridnia, N.; Habibi, D.; Lachowicz, S.; Kavousifard, A. Optimal scheduling in a microgrid with a tidal generation. Energy 2018, 171, 435–443. [Google Scholar] [CrossRef]
- Colombo, P.; Saeedmanesh, A.; Santarelli, M.; Brouwer, J. Dynamic dispatch of solid oxide electrolysis system for high renewable energy penetration in a microgrid. Energy Convers. Manag. 2019, 204, 112322. [Google Scholar] [CrossRef]
- Green, R.; Vasilakos, N. The economics of offshore wind. Energy Policy 2011, 39, 496–502. [Google Scholar] [CrossRef]
- Sierra-Garcia, J.E.; Santos, M. Improving Wind Turbine Pitch Control by Effective Wind Neuro-Estimators. IEEE Access 2021, 9, 10413–10425. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, L.; Wang, M.; Shi, F.; Gong, Z. Comparative analysis of nonlinear dynamic response for offshore wind turbine structures under incoming wind speed. Ships Offshore Struct. 2020, 16, 326–333. [Google Scholar] [CrossRef]
- Kang, J.; Sun, L.; Soares, C.G. Fault Tree Analysis of floating offshore wind turbines. Renew. Energy 2019, 133, 1455–1467. [Google Scholar]
- Jeon, S.H.; Cho, Y.U.; Seo, M.W.; Cho, J.R.; Jeong, W.B. Dynamic response of floating substructure of spar-type offshore wind turbine with catenary mooring cables. Ocean Eng. 2013, 72, 356–364. [Google Scholar] [CrossRef]
- Hallowell, S.T.; Arwade, S.R.; Fontana, C.M.; DeGroot, D.J.; Aubeny, C.P.; Diaz, B.D.; Myers, A.T.; Landon, M.E. System reliability of floating offshore wind farms with multiline anchors. Ocean Eng. 2018, 160, 94–104. [Google Scholar] [CrossRef]
- Chen, Z.; Blaabjerg, F. Wind farm—A power source in future power systems. Renew. Sustain. Energy Rev. 2009, 13, 1288–1300. [Google Scholar] [CrossRef]
- Karlõševa, A.; Nõmmann, S.; Nõmmann, T.; Urbel-Piirsalu, E.; Budziński, W.; Czajkowski, M.; Hanley, N. Marine trade-offs: Comparing the benefits of off-shore wind farms and marine protected areas. Energy Econ. 2016, 55, 127–134. [Google Scholar] [CrossRef] [Green Version]
- Blanco, M.I. The economics of wind energy. Renew. Sustain. Energy Rev. 2009, 13, 1372–1382. [Google Scholar]
- Heptonstall, P.; Gross, R.; Greenacre, P.; Cockerill, T. The cost of offshore wind: Understanding the past and projecting the future. Energy Policy 2011, 41, 815–821. [Google Scholar] [CrossRef]
- Lande-Sudall, D.; Stallard, T.; Stansby, P. Co-located offshore wind and tidal stream turbines: Assessment of energy yield and loading. Renew. Energy 2018, 118, 627–643. [Google Scholar]
- Fraenkel, P. Marine Current Turbines: Exploiting Currents for Large-Scale Power Generation; IGG Publishing Ltd.: London, UK, 2007. [Google Scholar]
- Asian Productivity Organization. Ministry of Business, Innovation and Employment, Wind Generation Stack Update; Roaring40s Wind Power Ltd.: Wellington, New Zealand, 2020. [Google Scholar]
- Karimirad, M. Offshore Energy Structures: For Wind Power, Wave Energy and Hybrid Marine Platforms; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Bhattacharya, S. Design of Foundations for Offshore Wind Turbines; Wiley Online Library: Hoboken, NJ, USA, 2019. [Google Scholar]
- Huckerby, J.; Johnson, D.; Nobs Line, N.P. New Zealand’s wave and tidal energy resources and their timetable for development. In Proceedings of the International Conference on Ocean Energy (ICOE), Brest, France, 15–17 October 2008. [Google Scholar]
- NIWA Tide Forecaster. Available online: https://tides.niwa.co.nz/ (accessed on 10 June 2021).
- The KNMI/ERA-40 Wave Atlas. Available online: http://projects.knmi.nl/wave_atlas/atlas_book.html#c57a (accessed on 10 June 2021).
- Crest Energy. Available online: http://www.crest-energy.com/faq.htm (accessed on 2 July 2022).
- Linz Information about Tides around New Zealand. Available online: https://www.linz.govt.nz/sea/tides/introduction-tides/tides-around-new-zealand (accessed on 4 February 2021).
- Homer Pro. Available online: https://www.homerenergy.com/ (accessed on 2 March 2020).
- Weibull Calculator. Available online: https://wind-data.ch/tools/weibull.php (accessed on 10 December 2021).
- IEC 61400. Available online: https://en.wikipedia.org/wiki/IEC_61400 (accessed on 9 July 2020).
- RETScreen. Available online: https://www.nrcan.gc.ca/maps-tools-publications/tools/data-analysis-software-modelling/retscreen/7465 (accessed on 4 June 2020).
- Gupta, R.; Biswas, A. Wind data analysis of silchar (assam, india) by rayleighs and weibull methods. J. Mech. Eng. Res. 2010, 2, 10–24. [Google Scholar]
- Ayodele, T.R.; Jimoh, A.A.; Munda, J.; Agee, J.T. Statistical analysis of wind speed and wind power potential of Port Elizabeth using Weibull parameters. J. Energy South. Afr. 2012, 23, 30–38. [Google Scholar] [CrossRef]
- OPTUM CE. Available online: https://optumce.com/ (accessed on 10 March 2022).
- IEC 61400-1:2005; IEC Classification of Wind Turbines. IEC: Geneva, Switzerland, 2015.
- BS EN IEC 61400-3-1:2019; Wind Energy Generation Systems. Design Requirements for Fixed Offshore Wind Turbines. BSI Standards Limited: Geneva, Switzerland, 2019.
- Veritas, N. Environmental Conditions and Environmental Loads; Recommend Practice DNV-RP-C205; Det Norske Veritas: Dresden, Germany, 2014; Available online: https://home.hvl.no/ansatte/tct/FTP/V2022%20Hydrodynamikk/Litteratur/RP-C205.pdf (accessed on 3 November 2022).
- Jose, N.M.; Mathai, A. A Study on Lateral Deformation of Monopile of Offshore Wind Turbine due to Environmental Loads. Procedia Technol. 2016, 24, 287–294. [Google Scholar] [CrossRef] [Green Version]
- Bowles, L. Foundation Analysis and Design; McGraw-Hill: New York, NY, USA, 1996. [Google Scholar]
- Bhattacharya, S.; Goda, K. Use of offshore wind farms to increase seismic resilience of Nuclear Power Plants. Soil Dyn. Earthq. Eng. 2016, 80, 65–68. [Google Scholar]
- Arany, L.; Bhattacharya, S.; Adhikari, S.; Hogan, S.; Macdonald, J. An analytical model to predict the natural frequency of offshore wind turbines on three-spring flexible foundations using two different beam models. Soil Dyn. Earthq. Eng. 2015, 74, 40–45. [Google Scholar] [CrossRef]
- Camp, T.R.; Morris, M.J.; Van Rooij, R.P.J.O.M.; Van Der Tempel, J.; Zaaijer, M.B.; Henderson, A.; Argyriadis, K.; Schwartz, S.; Just, H.; Grainger, W.; et al. Design Methods for Offshore Wind Turbines at Exposed Sites (Final Report of the OWTES Project EU JOULE III Project JOR3-CT98-0284); Garrad Hassan and Partners Ltd.: Bristol, UK, 2004. [Google Scholar]
- RP2A-WSD, A. Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms–Working Stress Design; American Petroleum Institute: Washington, DC, USA, 2000. [Google Scholar]
- Poulos, H.G.; Davis, E.H. Pile Foundation Analysis and Design; Wiley: New York, NY, USA, 1980; Volume 397. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Latitude (deg) | Longitude (deg) | Annual Average Water Velocity (m/s) | Depth of Water (m) | Average Yearly Wind Velocity (m/s) |
|---|---|---|---|---|---|
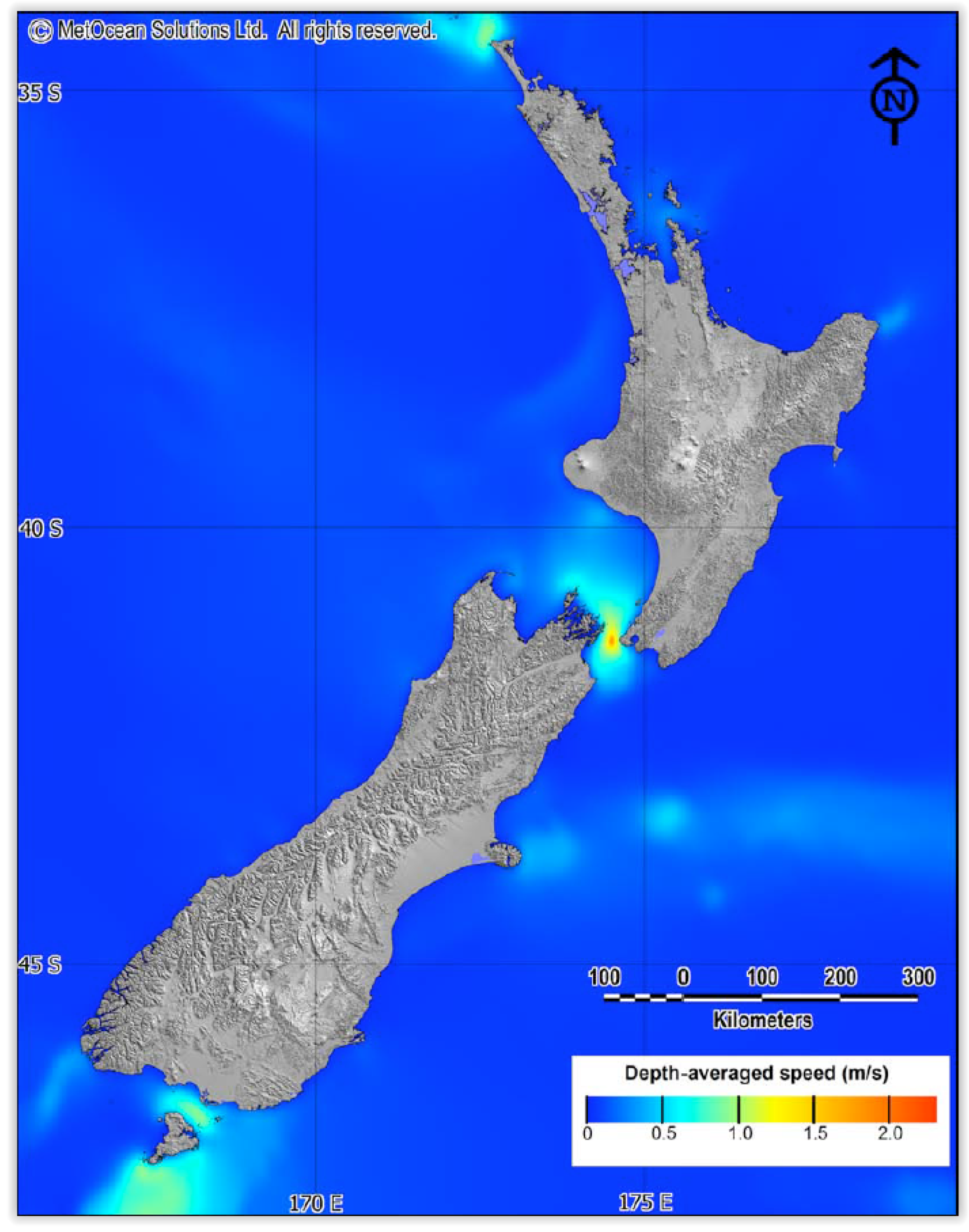
| Terawhiti | −41.279497° S | 174.524249° E | 1.09 | 30 | 7.10 |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Significant wave height with a 50-year return period [39] | Hs | 15 | m |
| Peak wave period | Ts | 13.73 | s |
| Maximum wave height (50 years) | Hm | 27.62 | m |
| Maximum wave peak period | Tm | 18.63 | s |
| Maximum water depth (50-year high water level) | S | 30 | m |
| Water density | ρw | 1030 | kg/m3 |
| Site | Highest Astronomical Tide (HAT) | Lowest Astronomical Tide (LAT) | Average Current (m/s) | Peak Current (m/s) | Water Depth (m) |
|---|---|---|---|---|---|
| Terawhiti | 1.93 | 0.39 | 1.09 | 2.60 | 30 |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
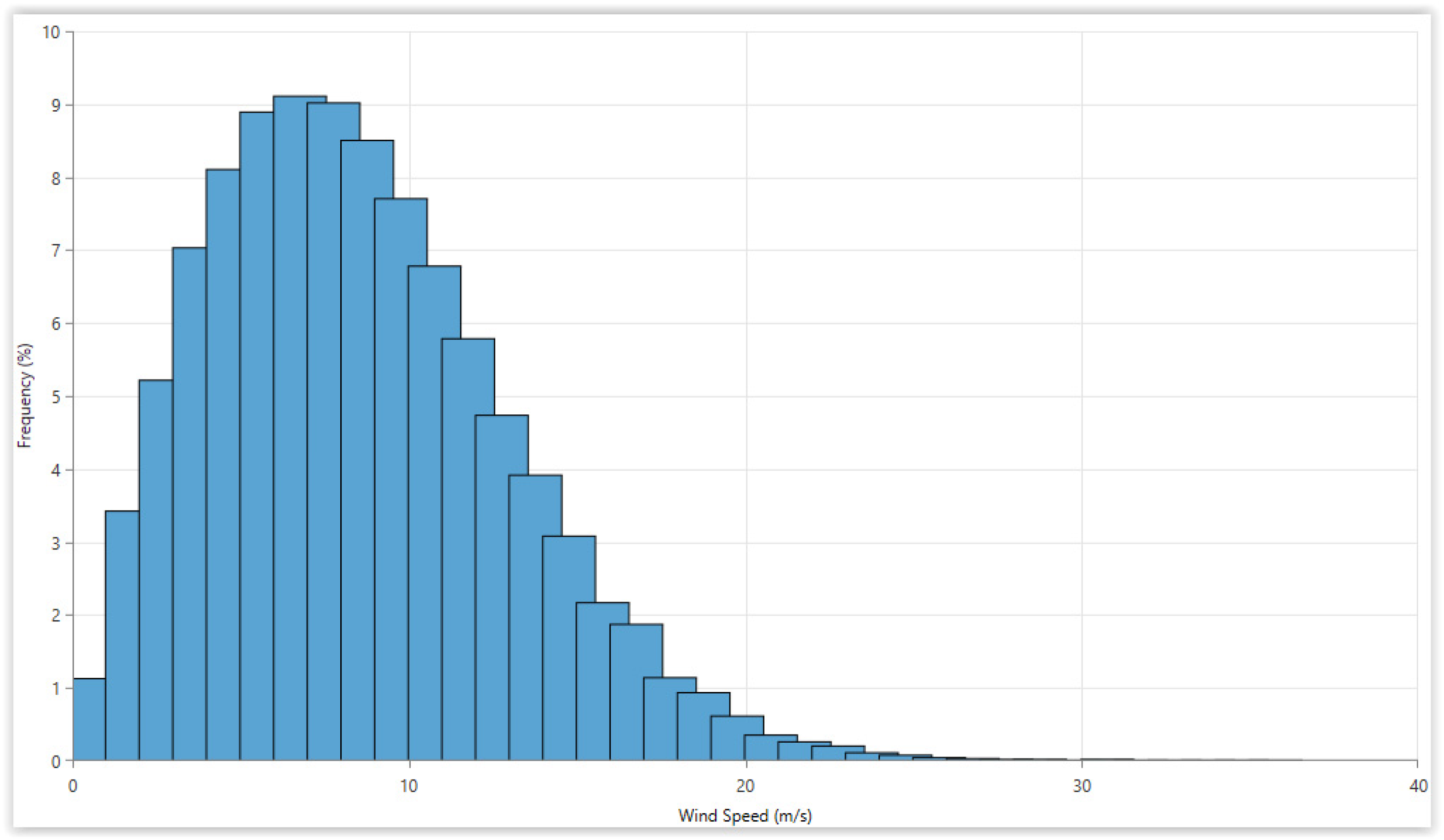
| Shape parameter-Weibull distribution [43] | s | 1.98 | [-] |
| Scale parameter-Weibull distribution [43] | K | 7.99 | m/s |
| Reference turbulence intensity [44] | I | 16 | % |
| Turbulence integral length scale [36] | LK | 340.2 | m |
| Annual wind speed [42] | uave | 7.10 | m/s |
| Air density [36] | ρa | 1.225 | kg/m3 |
| Parameter | Limit |
|---|---|
| The maximum stress ()-yield strength () | |
| Deflection of monopile () | |
| Tilt () | |
| Structural natural frequency(f0)-frequency of rotation of the rotor (f1P, max) | f0 > 1.1f1P, max = 0.24 Hz |
| Pile wall thickness (tP) | tP ≥ |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Turbine Power | P | 3.6 | MW |
| Turbine rotational Speed (Cut in/out) | uin/uout | 5-13 | rpm |
| Operational wind speed range | V | 4-25 | m/s |
| Rated wind speed | uR | 16.5 | m/s |
| Mass of the nacelle (NA) | mNA | 125 | tonnes |
| Hub height from mean sea level | H | 87 | m |
| Density of tower, monopile and TP-S355 Steel | ρ | 7860 | kg/m3 |
| Tower data | |||
| Top diameter | Dt | 3 | m |
| Bottom diameter | Db | 5 | m |
| Weight | mt | 255 | tonnes |
| Tower height | LT | 68 | m |
| Wall thickness | tT | 0.027 | m |
| Monopile data | |||
| Monopile Young’s module-S355 Steel | EP | 200 | GPa |
| Soil’s unit weight | γ | 16 | kN/m3 |
| Soil’s internal friction | ϕ | 30 | ° |
| Monopile length | LP | 60 | m |
| Monopile diameter | DP | 6 | m |
| Monopile thickness | tP | 0.083 | m |
| Monopile yield stress | 355 | MPa | |
| Monopile weight | WP | 700 | t |
| Transition piece (TP) data | |||
| TP Young’s module-S355 Steel | ETP | 200 | GPa |
| TP weight | WTP | 300 | t |
| Transition piece internal diameter | DTP | 6.16 | m |
| Transition piece thickness | tTP | 0.083 | m |
| Transition piece length | LTP | 29 | m |
| Grout and TP combined thickness | tG+tTP | 0.15 | m |
| Rotor and blade data | |||
| Turbine rotor diameter | D | 107 | m |
| Swept area | TSA | 8992 | m2 |
| Mass of rotor + hub | mR | 100 | tonnes |
| Rotor overhang | b | 4 | m |
| Blade root diameter | Broot | 4 | m |
| Blade tip chord length | Btip | 1 | m |
| Blade length | L | 52 | m |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Turbine Power | P | 2 | MW |
| Turbine rotational Speed (Cut in/out) | Ω | 1–3.05 | rpm |
| Operational tidal speed range | V | 1–4.5 | m/s |
| Turbine rotor diameter | D | 20 | m |
| Height from the seabed | ZS | 25 | m |
| Rotor Swept area | TSA | 314 | m2 |
| Mass of two turbines | m | 300 | tonnes |
| Scenario | Name and Description | Wind Model | Wave Model | Alignment |
|---|---|---|---|---|
| E-1 | Normal operational conditions. Wind and wave action in the same direction (no misalignment). | NTM at uR (U-1) | 1-yr ESS (W-1) | Collinear |
| E-2 | Extreme wave load scenario. Wind and wave action in the same direction (no misalignment). | ETM at uR (U-2) | 50-yr EWH (W-4) | Collinear |
| E-3 | Extreme wind load scenario. Wind and wave action in the same direction (no misalignment). | EOG at uR (U-3) | 1-yr EWH (W-2) | Collinear |
| E-4 | Cut-out wind speed and extreme operating gust scenario. Wind and wave action in the same direction (no misalignment). | EOG at uout (U-4) | 50-yr EWH (W-4) | Collinear |
| E-5 | Wind and wave misalignment scenario. Same as E-2, except the wind and wave are misaligned at an angle of = 90°. Due to low aerodynamic damping, the dynamic amplification is higher in the cross-wind direction. | ETM at uR (U-2) | 50-yr EWH (W-4) | Misaligned at = 90° |
| Item | Loose Sand-MC | Medium Sand-MC | Dense Sand-MC | Soft Clay-MC | Firm Clay-MC | Stiff Clay-MC |
|---|---|---|---|---|---|---|
| Cohesion c (kPa) | 0 | 0 | 0 | 5 | 10 | 20 |
| Friction angle ϕ (°) | 30 | 35 | 40 | 18 | 20 | 22 |
| Soil Unit Weight γ (kN/m3) | 16 | 18 | 20 | 19 | 20 | 21 |
| Item | Loose Sand-MC | Medium Sand-MC | Dense Sand-MC | Soft Clay-MC | Firm Clay-MC | Stiff Clay-MC |
|---|---|---|---|---|---|---|
| Max Displacement (m) | 1.0483 | 1.012 | 1.0203 | 1.0294 | 1.1341 | 1.2819 |
| Total Dissipation Energy (kJ) | 0.00049 | 0.0012 | 0.0678 | 0.016 | 0.0456 | 0.133 |
| Parameters | Wind Scenario (U-1) | Wind Scenario (U-2) | Wind Scenario (U-3) | Wind Scenario (U-4) |
|---|---|---|---|---|
| Standard deviation of wind speed | 2.69 | 3.1 | 2.7 | 2.7 |
| Standard deviation in f > f1P | 0.89 | 1.01 | - | - |
| Turbulent wind speed component | 1.13 | 2.02 | 7.1 | 7.1 |
| Total wind load Fwind [MN] | 1.68 | 1.86 | 3 | 0.69 |
| Total wind moment Mwind [MNm] | 196.5 | 217.62 | 351 | 80.7 |
| Parameters | Wave Scenario (W-1) | Wave Scenario (W-2) | Wave Scenario (W-3) | Wave Scenario (W-4) |
|---|---|---|---|---|
| Wave period T [s] | 12.2 | 16.66 | 13.73 | 18.63 |
| Wave height H [m] | 12 | 22.10 | 15 | 27.62 |
| Wave frequency f [Hz] | 0.081 | 0.060 | 0.072 | 0.053 |
| Dynamic amplification-along-wind DAFx [-] | 1.060049 | 1.032081 | 1.046857 | 1.024857 |
| Dynamic amplification-cross-wind DAFy [-] | 1.1060158 | 1.032136 | 1.046939 | 1.024899 |
| Total wave load Fw[MN] | 3.1 | 7.4 | 4.6 | 8.04 |
| Total wave moment Mw [MNm] | 55.6 | 164.3 | 119 | 210.93 |
| Total wave load with DAF Fw,DAF [MNm] | 3.42 | 7.63 | 4.81 | 8.24 |
| Total wave moment with DAF Mw,DAF [MNm] | 61.5 | 169.5 | 124.5 | 216.1 |
| Parameter | Normal Operation E-1 | Extreme Wave Scenario E-2 | Extreme Wind Scenario E-3 | Cut-out Wind+ Extreme Wave Scenario E-4 | Wind-Wave Misalignment E-5 |
|---|---|---|---|---|---|
| Maximum wind load [MN] | 1.68 | 1.86 | 3 | 0.69 | 1.86 |
| Maximum wave load [MN] | 3.1 | 8.04 | 7.4 | 8.04 | 8.04 |
| Combined maximum load [MN] | 4.78 | 9.9 | 10.4 | 8.73 | 9.9 |
| Maximum wind moment [MNm] | 196.5 | 217.62 | 351 | 80.7 | 217.62 |
| Maximum wave moment [MNm] | 55.6 | 210.93 | 164.3 | 210.93 | 210.93 |
| Combined maximum moment [MN] | 252.1 | 428.55 | 515.3 | 291.63 | 428.55 |
| Cycle time period [s] | 12.2 | 18.63 | 16.66 | 18.63 | 18.63 |
| frequency [Hz] | 0.081 | 0.053 | 0.060 | 0.053 | 0.053 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasab, N.M.; Kilby, J.; Bakhtiaryfard, L. Analysis and Design of Monopile Foundations for Offshore Wind and Tidal Turbine Structures. Water 2022, 14, 3555. https://doi.org/10.3390/w14213555
Nasab NM, Kilby J, Bakhtiaryfard L. Analysis and Design of Monopile Foundations for Offshore Wind and Tidal Turbine Structures. Water. 2022; 14(21):3555. https://doi.org/10.3390/w14213555
Chicago/Turabian StyleNasab, Navid Majdi, Jeff Kilby, and Leila Bakhtiaryfard. 2022. "Analysis and Design of Monopile Foundations for Offshore Wind and Tidal Turbine Structures" Water 14, no. 21: 3555. https://doi.org/10.3390/w14213555
APA StyleNasab, N. M., Kilby, J., & Bakhtiaryfard, L. (2022). Analysis and Design of Monopile Foundations for Offshore Wind and Tidal Turbine Structures. Water, 14(21), 3555. https://doi.org/10.3390/w14213555