
Data-Driven Flood Alert System (FAS) Using Extreme Gradient Boosting (XGBoost) to Forecast Flood Stages




Abstract
:1. Introduction
2. Data and Methods
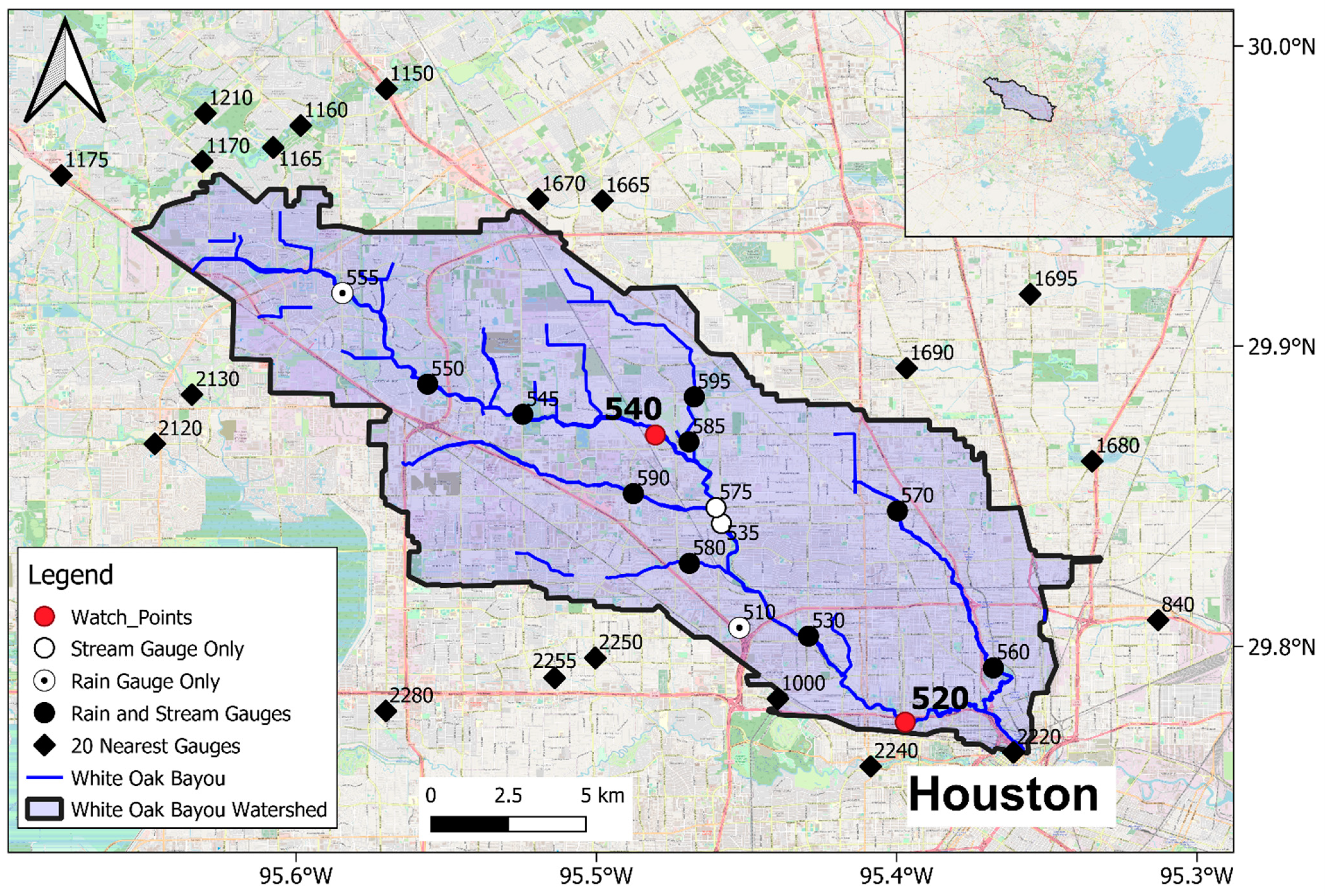
2.1. Study Area
2.2. Development of XGBoost-Based Flood Alert System
2.2.1. Data Collection
2.2.2. Performance Evaluation Metrics
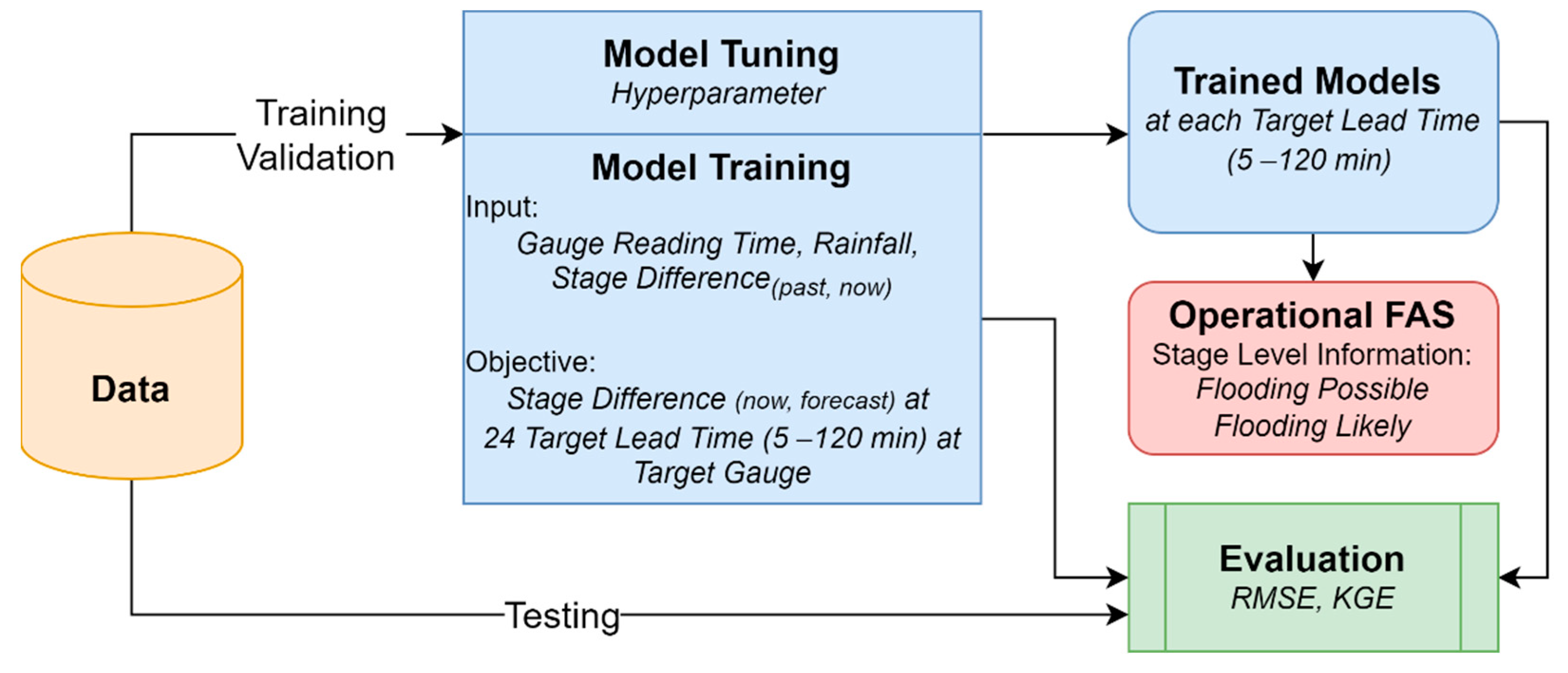
2.2.3. Model Development
2.2.4. Flood Alert Design
- If the current stage exceeds the critical stage, then the system will report flooding;
- If the current stage does not exceed the critical stage, then predictions for all available target lead times will be made using a set of trained models;
- If none of the predicted stages exceeds the critical stage, then all-clear will be reported; and
- If one or more models predict stages exceeding the critical stage, then the smallest target lead time will be reported by the system.
3. Results
3.1. Model Performance Evaluation
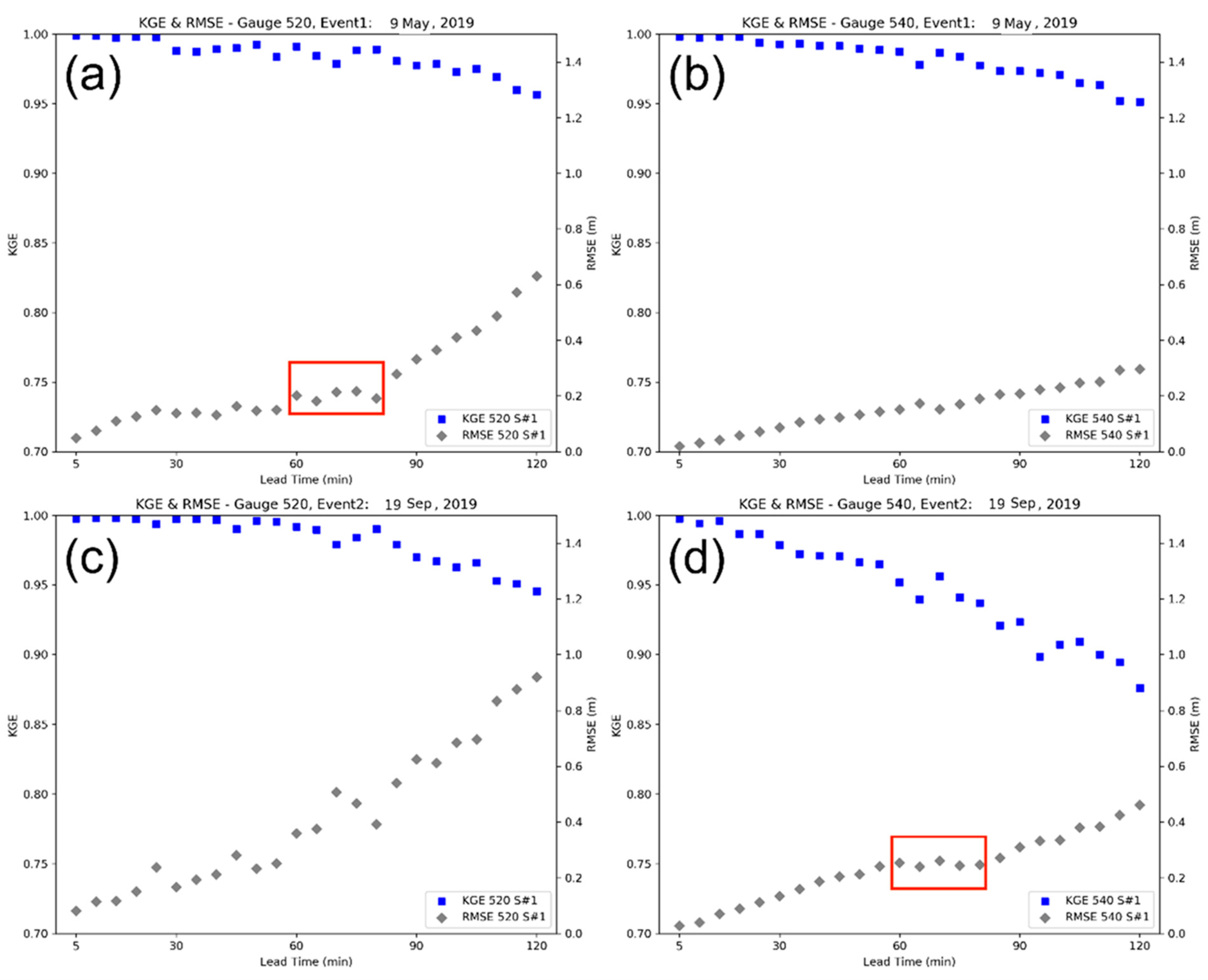
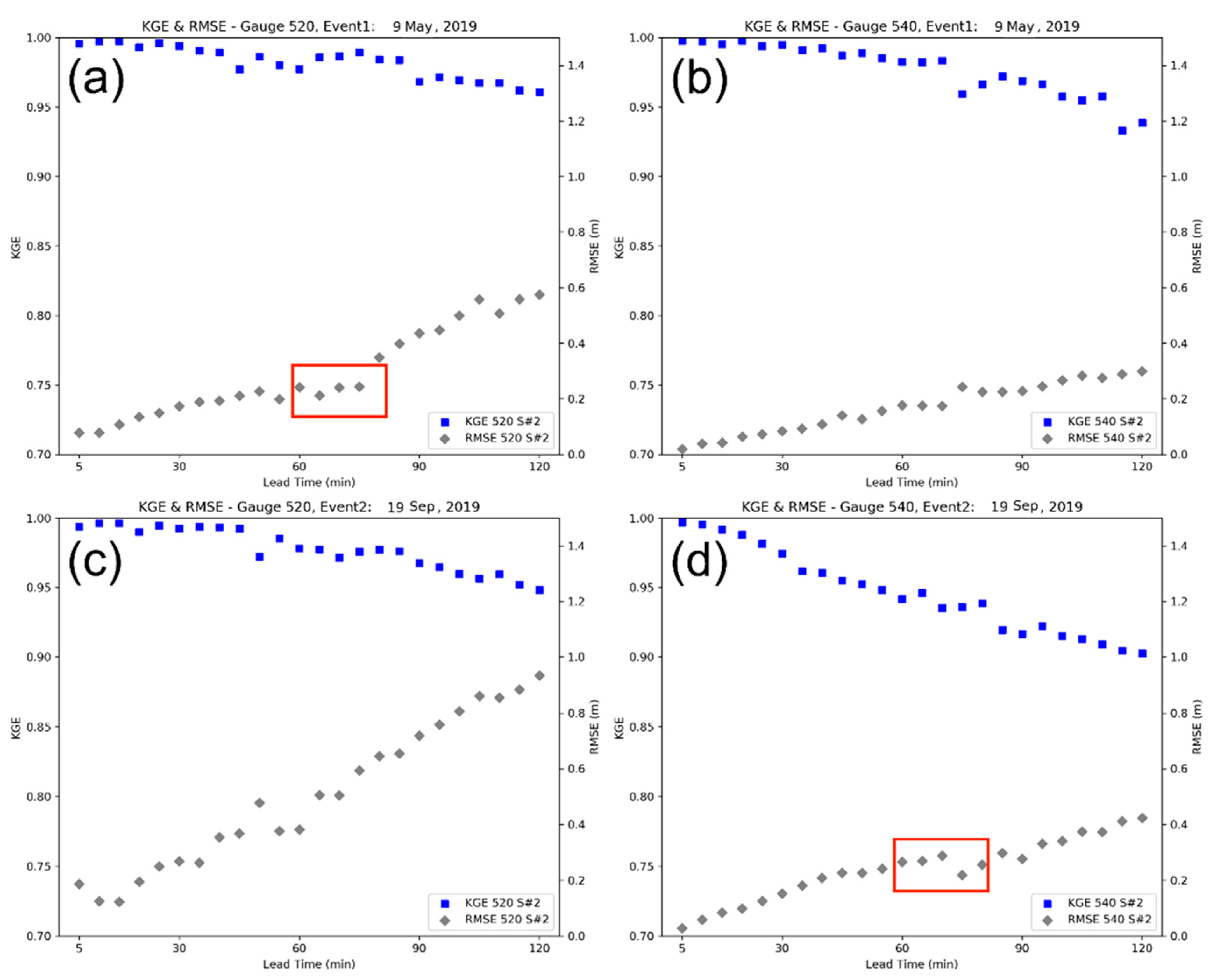
3.1.1. Quantitative Analysis of Model Performance
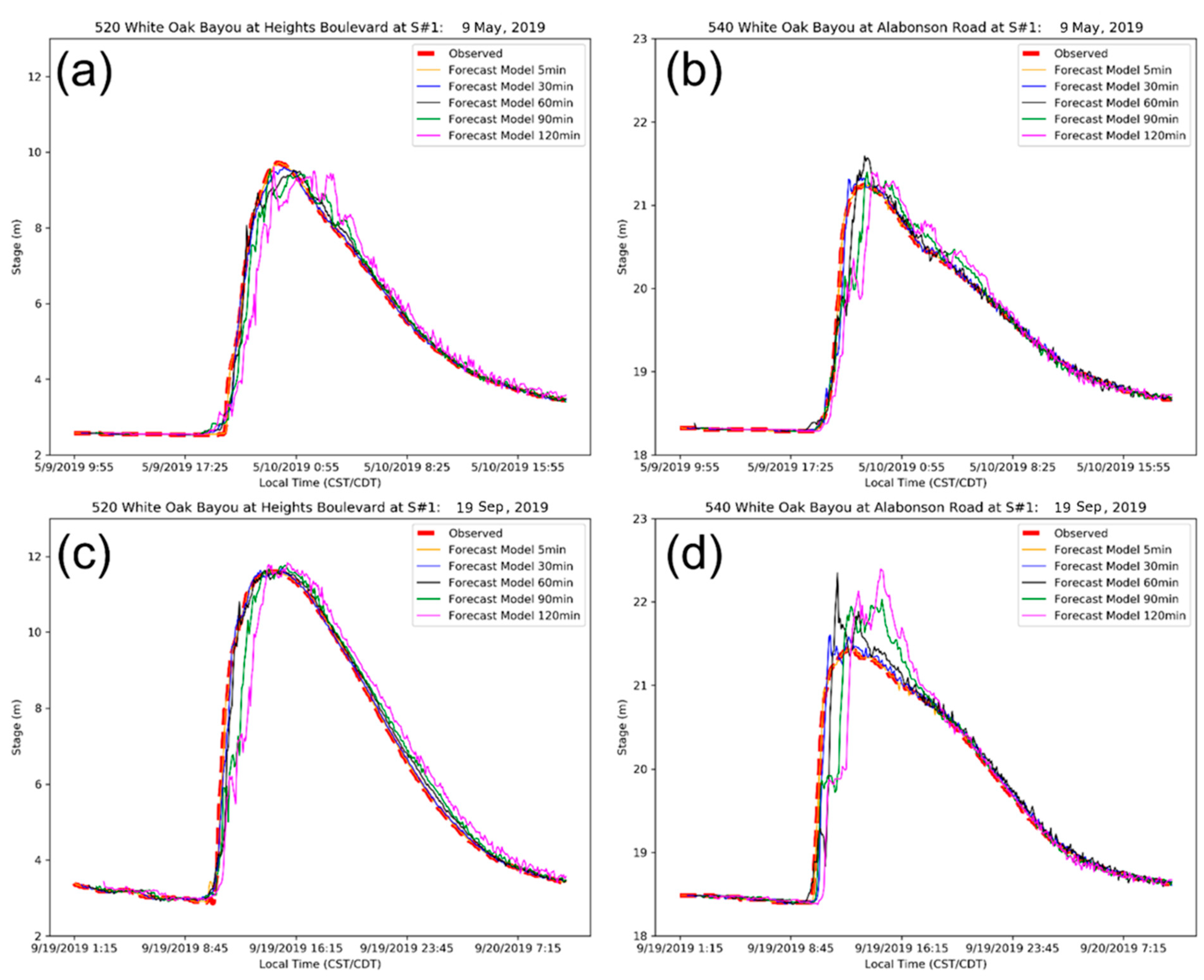
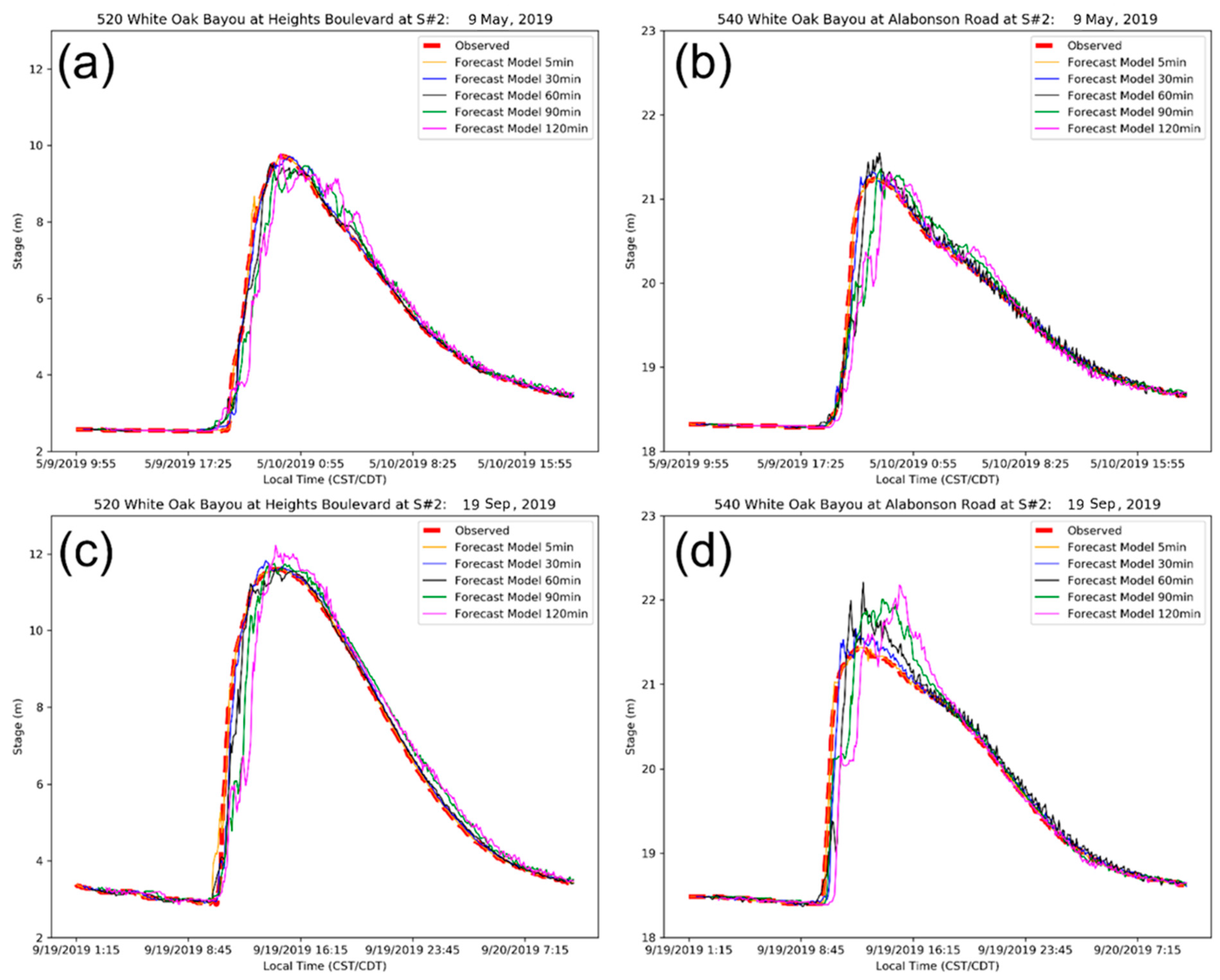
3.1.2. Comparison of Measured and Forecasted Stages
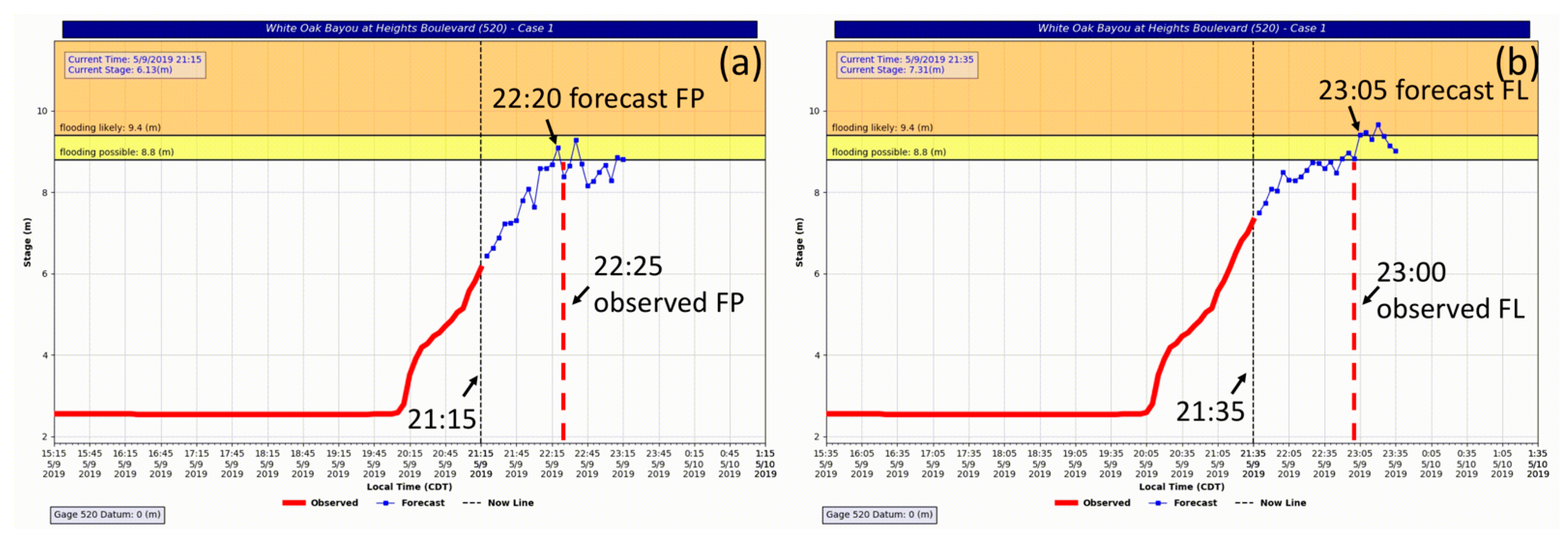
3.2. Evaluation of Real-Time Stage Forecasting
4. Discussion
5. Conclusions
- Improving the design of the FAS warning criteria: the current system issues alerts when at least three (3) target lead-time models predict all stage values over a critical level. Although the criteria have been proved to be effective based on the experiments and engineering judgement, this design is still regarded as an empirical approach and will need to be further investigated with more analyses.
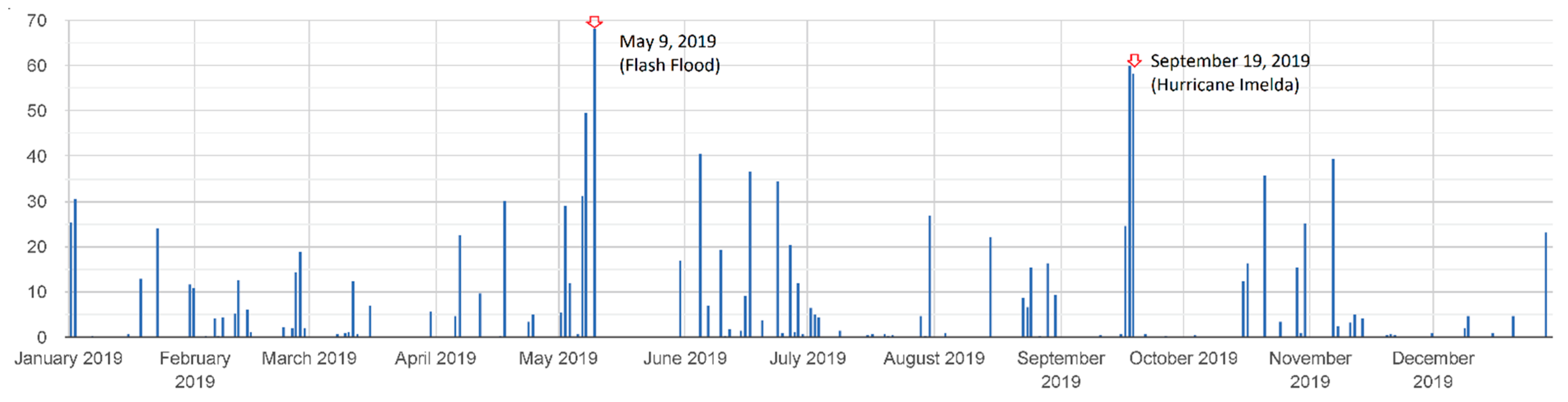
- Considering the rainfall characteristics of flood events: the types of the rainfall are not currently classified in the testing and validation datasets for the FAS (e.g., the May 2019 event was produced by a cold front and the 19 September event was caused by a tropical cyclone—Hurricane Imelda). Different types of rainfall may have distinct impacts on the FAS performance due to their spatiotemporal characteristics that are indirectly reflected in the gauge readings (Table 4). An on-going study on this topic will be reported in a forthcoming paper.
- Introducing spatial information relative to the watershed: the XGBoost-based FAS is built solely based on the temporal scale without incorporating any level of spatial information. Gauge readings are fed to the models as independent inputs without any spatial weighting as performed. The authors think that the spatial information representing the physical conditions of the watershed (e.g., initial soil moisture, watershed size, land use, etc.) need to be factored in the training process to further enhance the prediction performance.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mosavi, A.; Ozturk, P.; Chau, K. Flood Prediction Using Machine Learning Models: Literature Review. Water 2018, 10, 1536. [Google Scholar] [CrossRef] [Green Version]
- Smith, A.B. U.S. Billion-Dollar Weather and Climate Disasters, 1980–Present (NCEI Accession 0209268); National Centers for Environmental Information: Asheville, NC, USA, 2020.
- Fang, Z.; Dolan, G.; Sebastian, A.; Bedient, P.B. Case Study of Flood Mitigation and Hazard Management at the Texas Medical Center in the Wake of Tropical Storm Allison in 2001. Nat. Hazards Rev. 2014, 15, 05014001. [Google Scholar] [CrossRef]
- Fares, A. Climate Change and Extreme Events; Elsevier: San Diego, CA, USA, 2021; ISBN 978-0-12-823288-0. [Google Scholar]
- United Nations Economic and Social Commission for Asia and the Pacific (ESCAP) Flood Forecasting and Early Warning in Transboundary River Basins: A Toolkit. Available online: https://www.unescap.org/resources/flood-forecasting-and-early-warning-transboundary-river-basins-toolkit (accessed on 9 March 2021).
- Pappenberger, F.; Cloke, H.L.; Parker, D.J.; Wetterhall, F.; Richardson, D.S.; Thielen, J. The Monetary Benefit of Early Flood Warnings in Europe. Environ. Sci. Policy 2015, 51, 278–291. [Google Scholar] [CrossRef]
- Eslamian, S. (Ed.) Handbook of Engineering Hydrology. Fundamentals and Applications; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2013; ISBN 978-1-4665-5241-8. [Google Scholar]
- Hussain, F.; Wu, R.-S.; Wang, J.-X. Comparative Study of Very Short-Term Flood Forecasting Using Physics-Based Numerical Model and Data-Driven Prediction Model. Nat. Hazards 2021, 107, 249–284. [Google Scholar] [CrossRef]
- Christian, J.; Fang, Z.; Torres, J.; Deitz, R.; Bedient, P. Modeling the Hydraulic Effectiveness of a Proposed Storm Surge Barrier System for the Houston Ship Channel during Hurricane Events. Nat. Hazards Rev. 2015, 16, 04014015. [Google Scholar] [CrossRef]
- Torres, J.M.; Bass, B.; Irza, N.; Fang, Z.; Proft, J.; Dawson, C.; Kiani, M.; Bedient, P. Characterizing the Hydraulic Interactions of Hurricane Storm Surge and Rainfall–Runoff for the Houston–Galveston Region. Coast. Eng. 2015, 106, 7–19. [Google Scholar] [CrossRef] [Green Version]
- Fang, Z.N.; Shultz, M.J.; Wienhold, K.J.; Zhang, J.; Gao, S. Case Study: Comparative Analysis of Hydrologic Simulations with Areal-Averaging of Moving Rainfall. Hydrology 2019, 6, 12. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Lin, P.; Gao, S.; Fang, Z. Understanding the Re-Infiltration Process to Simulating Streamflow in North Central Texas Using the WRF-Hydro Modeling System. J. Hydrol. 2020, 587, 124902. [Google Scholar] [CrossRef]
- Najibi, N.; Devineni, N.; Lu, M.; Perdigão, R.A.P. Coupled Flow Accumulation and Atmospheric Blocking Govern Flood Duration. Npj Clim. Atmos. Sci. 2019, 2, 19. [Google Scholar] [CrossRef]
- Franchini, M.; Lamberti, P. A Flood Routing Muskingum Type Simulation and Forecasting Model Based on Level Data Alone. Water Resour. Res. 1994, 30, 2183–2196. [Google Scholar] [CrossRef]
- Krzysztofowicz, R.; Herr, H.D. Hydrologic Uncertainty Processor for Probabilistic River Stage Forecasting: Precipitation-Dependent Model. J. Hydrol. 2001, 249, 46–68. [Google Scholar] [CrossRef]
- Krzysztofowicz, R. Bayesian System for Probabilistic River Stage Forecasting. J. Hydrol. 2002, 268, 16–40. [Google Scholar] [CrossRef]
- Krzysztofowicz, R. Bayesian Theory of Probabilistic Forecasting via Deterministic Hydrologic Model. Water Resour. Res. 1999, 35, 2739–2750. [Google Scholar] [CrossRef] [Green Version]
- Fang, Z.; Bedient, P.B.; Buzcu-Guven, B. Long-Term Performance of a Flood Alert System and Upgrade to FAS3: A Houston, Texas, Case Study. J. Hydrol. Eng. 2011, 16, 818–828. [Google Scholar] [CrossRef]
- Vieux, B.E.; Cui, Z.; Gaur, A. Evaluation of a Physics-Based Distributed Hydrologic Model for Flood Forecasting. J. Hydrol. 2004, 298, 155–177. [Google Scholar] [CrossRef]
- Symonds, A.M.; Vijverberg, T.; Post, S.; Van der Spek, B.-J.; Henrotte, J.; Sokolewicz, M. Comparison between MIKE 21 FM, Delft3D and Delft3D FM Flow Models of Western Port Bay, Australia. Int. Conf. Coastal. Eng. 2017, 11. [Google Scholar] [CrossRef]
- Bates, P.D.; De Roo, A.P.J. A Simple Raster-Based Model for Flood Inundation Simulation. J. Hydrol. 2000, 236, 54–77. [Google Scholar] [CrossRef]
- Collier, C.G. Flash Flood Forecasting: What Are the Limits of Predictability? Q. J. R. Meteorol. Soc. 2007, 133, 3–23. [Google Scholar] [CrossRef]
- Nayak, P.C.; Sudheer, K.P.; Rangan, D.M.; Ramasastri, K.S. Short-Term Flood Forecasting with a Neurofuzzy Model: Flood Forecasting with a Neurofuzzy Model. Water Resour. Res. 2005, 41. [Google Scholar] [CrossRef] [Green Version]
- Hosseiny, H.; Nazari, F.; Smith, V.; Nataraj, C. A Framework for Modeling Flood Depth Using a Hybrid of Hydraulics and Machine Learning. Sci. Rep. 2020, 10, 8222. [Google Scholar] [CrossRef]
- Tu, H.; Wang, X.; Zhang, W.; Peng, H.; Ke, Q.; Chen, X. Flash Flood Early Warning Coupled with Hydrological Simulation and the Rising Rate of the Flood Stage in a Mountainous Small Watershed in Sichuan Province, China. Water 2020, 12, 255. [Google Scholar] [CrossRef] [Green Version]
- Shen, C.; Laloy, E.; Elshorbagy, A.; Albert, A.; Bales, J.; Chang, F.-J.; Ganguly, S.; Hsu, K.-L.; Kifer, D.; Fang, Z.; et al. HESS Opinions: Incubating Deep-Learning-Powered Hydrologic Science Advances as a Community. Hydrol. Earth Syst. Sci. 2018, 22, 5639–5656. [Google Scholar] [CrossRef] [Green Version]
- Meresa, H. Modelling of River Flow in Ungauged Catchment Using Remote Sensing Data: Application of the Empirical (SCS-CN), Artificial Neural Network (ANN) and Hydrological Model (HEC-HMS). Model. Earth Syst. Environ. 2019, 5, 257–273. [Google Scholar] [CrossRef]
- Hwang, S.H.; Ham, D.H.; Kim, J.H. Forecasting Performance of LS-SVM for Nonlinear Hydrological Time Series. KSCE J. Civ. Eng. 2012, 16, 870–882. [Google Scholar] [CrossRef]
- Chang, L.-C.; Shen, H.-Y.; Wang, Y.-F.; Huang, J.-Y.; Lin, Y.-T. Clustering-Based Hybrid Inundation Model for Forecasting Flood Inundation Depths. J. Hydrol. 2010, 385, 257–268. [Google Scholar] [CrossRef]
- Bermúdez, M.; Ntegeka, V.; Wolfs, V.; Willems, P. Development and Comparison of Two Fast Surrogate Models for Urban Pluvial Flood Simulations. Water Resour. Manag. 2018, 32, 2801–2815. [Google Scholar] [CrossRef]
- Liu, Y.; Pender, G. A Flood Inundation Modelling Using V-Support Vector Machine Regression Model. Eng. Appl. Artif. Intell. 2015, 46, 223–231. [Google Scholar] [CrossRef]
- Yaseen, Z.M.; El-shafie, A.; Jaafar, O.; Afan, H.A.; Sayl, K.N. Artificial Intelligence Based Models for Stream-Flow Forecasting: 2000–2015. J. Hydrol. 2015, 530, 829–844. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, Q.; Shao, J.; Wang, G. Dynamic Streamflow Simulation via Online Gradient-Boosted Regression Tree. J. Hydrol. Eng. 2019, 24, 04019041. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Ma, M.; Zhao, G.; He, B.; Li, Q.; Dong, H.; Wang, S.; Wang, Z. XGBoost-Based Method for Flash Flood Risk Assessment. J. Hydrol. 2021, 598, 126382. [Google Scholar] [CrossRef]
- Abedi, R.; Costache, R.; Shafizadeh-Moghadam, H.; Pham, Q.B. Flash-Flood Susceptibility Mapping Based on XGBoost, Random Forest and Boosted Regression Trees. Geocarto Int. 2021, 1–18. [Google Scholar] [CrossRef]
- Potdar, A.S.; Kirstetter, P.-E.; Woods, D.; Saharia, M. Toward Predicting Flood Event Peak Discharge in Ungauged Basins by Learning Universal Hydrological Behaviors with Machine Learning. J. Hydrometeorol. 2021, 22, 2971–2982. [Google Scholar]
- Guo, W.-D.; Chen, W.-B.; Yeh, S.-H.; Chang, C.-H.; Chen, H. Prediction of River Stage Using Multistep-Ahead Machine Learning Techniques for a Tidal River of Taiwan. Water 2021, 13, 920. [Google Scholar] [CrossRef]
- Nguyen, D.H.; Le, X.H.; Heo, J.-Y.; Bae, D.-H. Development of an Extreme Gradient Boosting Model Integrated With Evolutionary Algorithms for Hourly Water Level Prediction. IEEE Access 2021, 9, 125853–125867. [Google Scholar] [CrossRef]
- White Oak Bayou: An Evolving Urban Waterway; Harris County Flood Control District: Houston, TX, USA, 2000; Retrieved 27 March 2021.
- White Oak Bayou Watershed; Harris County Flood Control District: Houston, TX, USA, July 2013; Retrieved 27 March 2021.
- The Growing Threat of Urban Flooding | Center for Disaster Resilience. Available online: https://cdr.umd.edu/urban-flooding-report (accessed on 2 April 2021).
- Memorandum of Hurricane Harvey; Harris County Flood Control District: Houston, TX, USA, 4 June 2018; Retrieved 27 March 2021.
- Gao, S.; Fang, Z. Using Storm Transposition to Investigate the Relationships between Hydrologic Responses and Spatial Moments of Catchment Rainfall. Nat. Hazards Rev. 2018, 19, 04018015. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, J.; Li, D.; Jiang, H.; Fang, Z.N. Evaluation of Multiradar Multisensor and Stage IV Quantitative Precipitation Estimates during Hurricane Harvey. Nat. Hazards Rev. 2021, 22, 04020057. [Google Scholar] [CrossRef]
- Funk, C.; Peterson, P.; Landsfeld, M.; Pedreros, D.; Verdin, J.; Shukla, S.; Husak, G.; Rowland, J.; Harrison, L.; Hoell, A.; et al. The Climate Hazards Infrared Precipitation with Stations—A New Environmental Record for Monitoring Extremes. Sci. Data 2015, 2, 150066. [Google Scholar] [CrossRef] [Green Version]
- Gupta, H.V.; Kling, H.; Yilmaz, K.K.; Martinez, G.F. Decomposition of the Mean Squared Error and NSE Performance Criteria: Implications for Improving Hydrological Modelling. J. Hydrol. 2009, 377, 80–91. [Google Scholar] [CrossRef] [Green Version]
- Young, C.-C.; Liu, W.-C.; Wu, M.-C. A Physically Based and Machine Learning Hybrid Approach for Accurate Rainfall-Runoff Modeling during Extreme Typhoon Events. Appl. Soft Comput. 2017, 53, 205–216. [Google Scholar] [CrossRef]
- Ibrahem Ahmed Osman, A.; Najah Ahmed, A.; Chow, M.F.; Feng Huang, Y.; El-Shafie, A. Extreme Gradient Boosting (Xgboost) Model to Predict the Groundwater Levels in Selangor Malaysia. Ain Shams Eng. J. 2021, 12, 1545–1556. [Google Scholar] [CrossRef]
- Piacentini, T.; Carabella, C.; Boccabella, F.; Ferrante, S.; Gregori, C.; Mancinelli, V.; Pacione, A.; Pagliani, T.; Miccadei, E. Geomorphology-Based Analysis of Flood Critical Areas in Small Hilly Catchments for Civil Protection Purposes and Early Warning Systems: The Case of the Feltrino Stream and the Lanciano Urban Area (Abruzzo, Central Italy). Water 2020, 12, 2228. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Data | Validation Data | Testing Data | |
|---|---|---|---|
| % of total observations | 70% | 22.5% | 7.5% |
| Time coverages | 1 January 2010 to 31 December 2016 | 1 January 2017 to 31 March 2019 | 1 April 2019 to 30 September 2019 |
| Notable Historical Flood Events | Memorial Day (2015) | Hurricane Harvey (2017) | Flash Flood in May (2019) |
| Tax Day (2016) | Independence Day (2018) | Hurricane Imelda (2019) |
| Target Lead Time (min) | Gauge 520 S#1 (m) | Gauge 540 S#1 (m) | Gauge 520 S#2 (m) | Gauge 540 S#2 (m) |
|---|---|---|---|---|
| 5–30 | 0.089–0.101 | 0.028–0.032 | 0.088–0.101 | 0.04–0.054 |
| 35–60 | 0.091–0.101 | 0.033–0.043 | 0.092–0.103 | 0.041–0.051 |
| 65–90 | 0.105–0.122 | 0.042–0.049 | 0.106–0.129 | 0.047–0.056 |
| 95–120 | 0.128–0.152 | 0.052–0.065 | 0.133–0.142 | 0.049–0.063 |
| Target Lead Time (min) | Gauge 520 S#1 | Gauge 540 S#1 | Gauge 520 S#2 | Gauge 540 S#2 |
|---|---|---|---|---|
| 5–30 | 0.961–0.976 | 0.99–0.998 | 0.961–0.976 | 0.992–0.997 |
| 35–60 | 0.978–0.981 | 0.982–0.988 | 0.978–0.98 | 0.979–0.989 |
| 65–90 | 0.975–0.98 | 0.976–0.982 | 0.972–0.98 | 0.974–0.98 |
| 95–120 | 0.961–0.972 | 0.961–0.972 | 0.966–0.97 | 0.964–0.973 |
| Figure IDs | Storm Events | Gauge # | Scenario | Forecasted Lead Time | Observed Lead Time | Difference of Lead Times (Forecasted—Observed) |
|---|---|---|---|---|---|---|
| Figure 8a | 9 May Flood | 520 | S#1 | 65 min (FP) | 70 min (FP) | −5 min |
| Figure 8b | 9 May Flood | 520 | S#1 | 90 min (FL) | 85 min (FL) | 5 min |
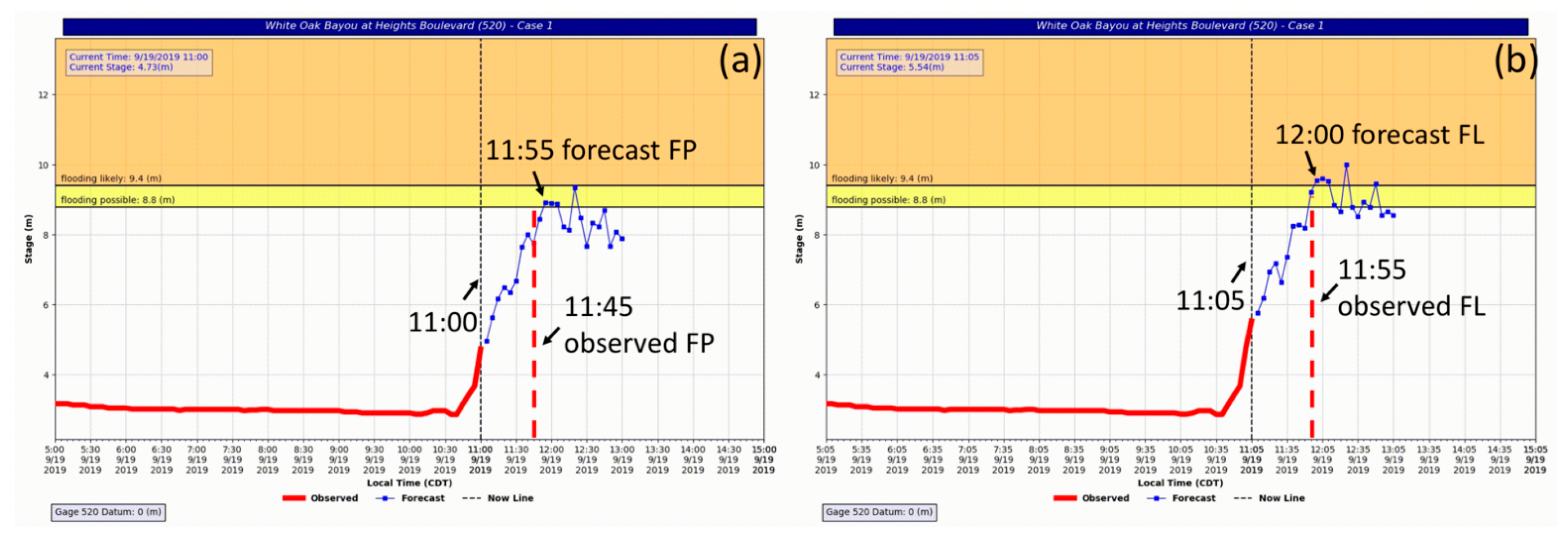
| Figure 9a | 19 September Flood | 520 | S#1 | 55 min (FP) | 45 min (FP) | 10 min |
| Figure 9b | 19 September Flood | 520 | S#1 | 55 min (FL) | 50 min (FL) | 5 min |
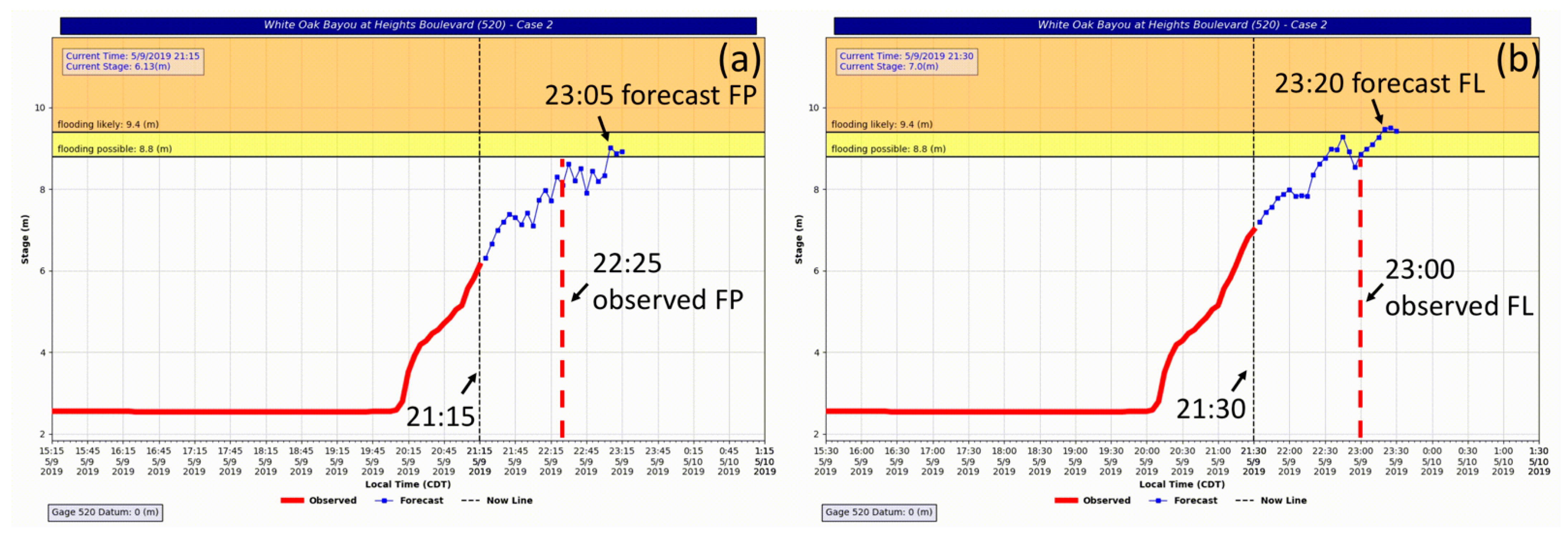
| Figure 10a | 9 May Flood | 520 | S#2 | 110 min (FP) | 70 min (FP) | 40 min |
| Figure 10b | 9 May Flood | 520 | S#2 | 110 min (FL) | 90 min (FL) | 20 min |
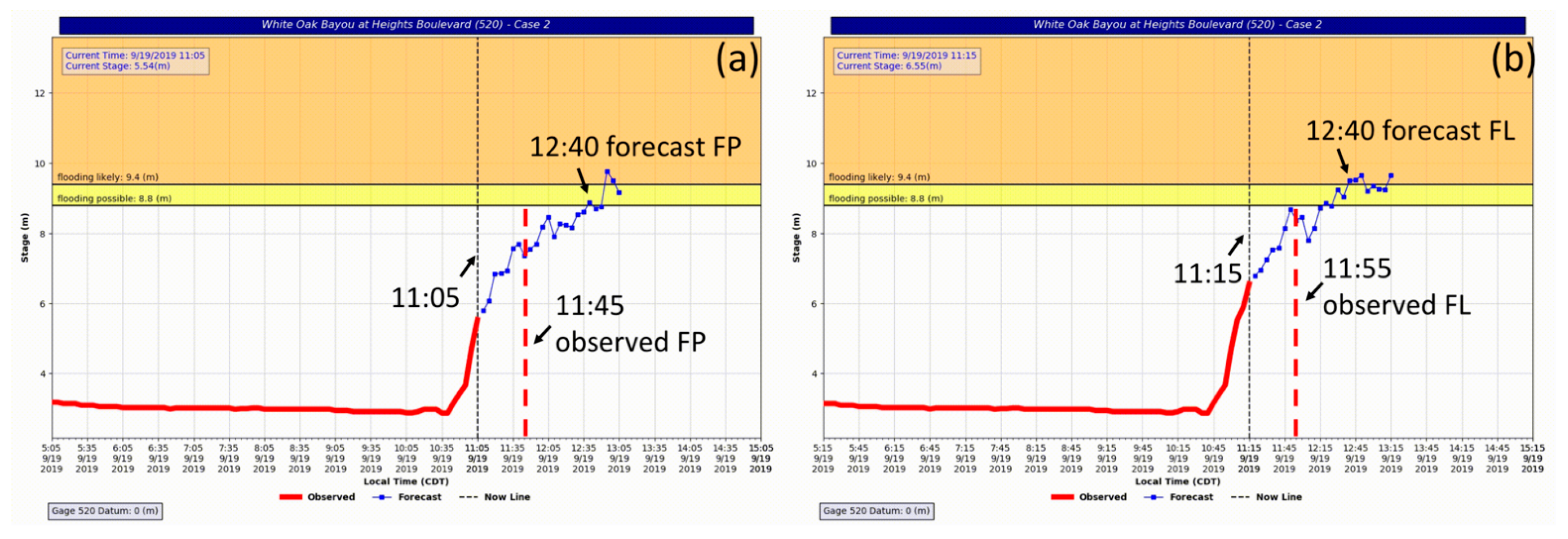
| Figure 11a | 19 September Flood | 520 | S#2 | 95 min (FP) | 40 min (FP) | 55 min |
| Figure 11b | 19 September Flood | 520 | S#2 | 85 min (FL) | 40 min (FL) | 45 min |
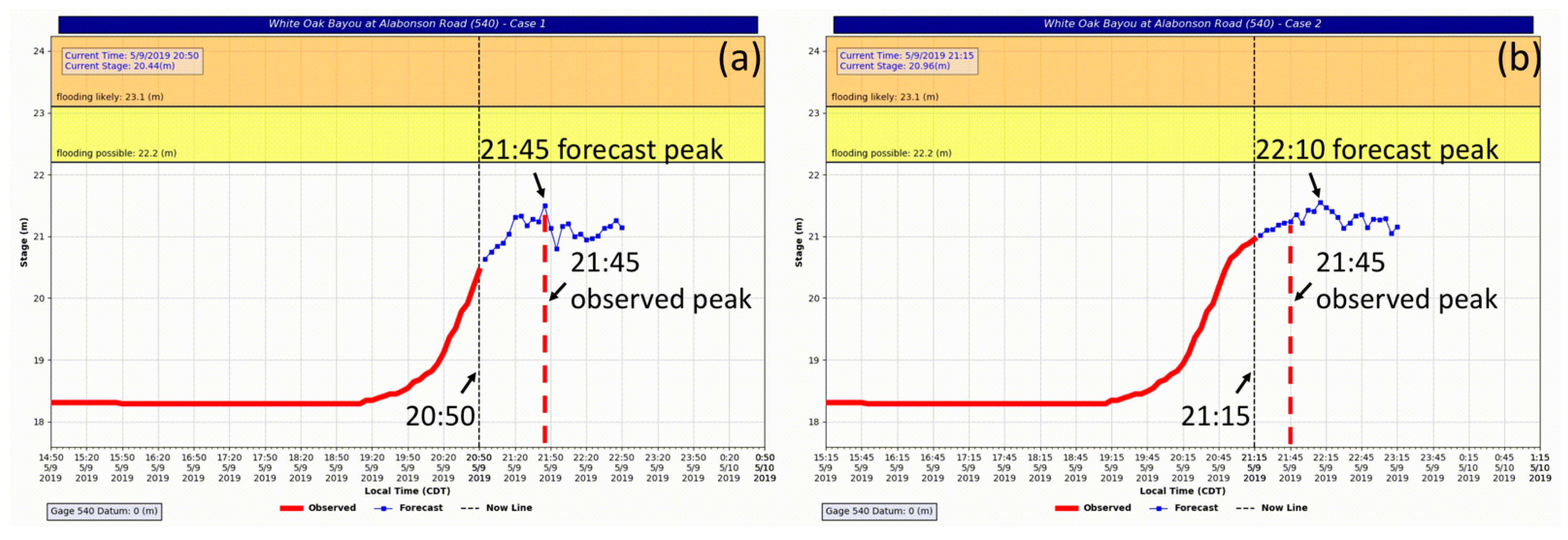
| Figure 12a | 9 May Flood | 540 | S#1 | 55 min (PS) | 55 min (PS) | 0 min |
| Figure 12b | 9 May Flood | 540 | S#2 | 55 min (PS) | 30 min (PS) | 25 min |
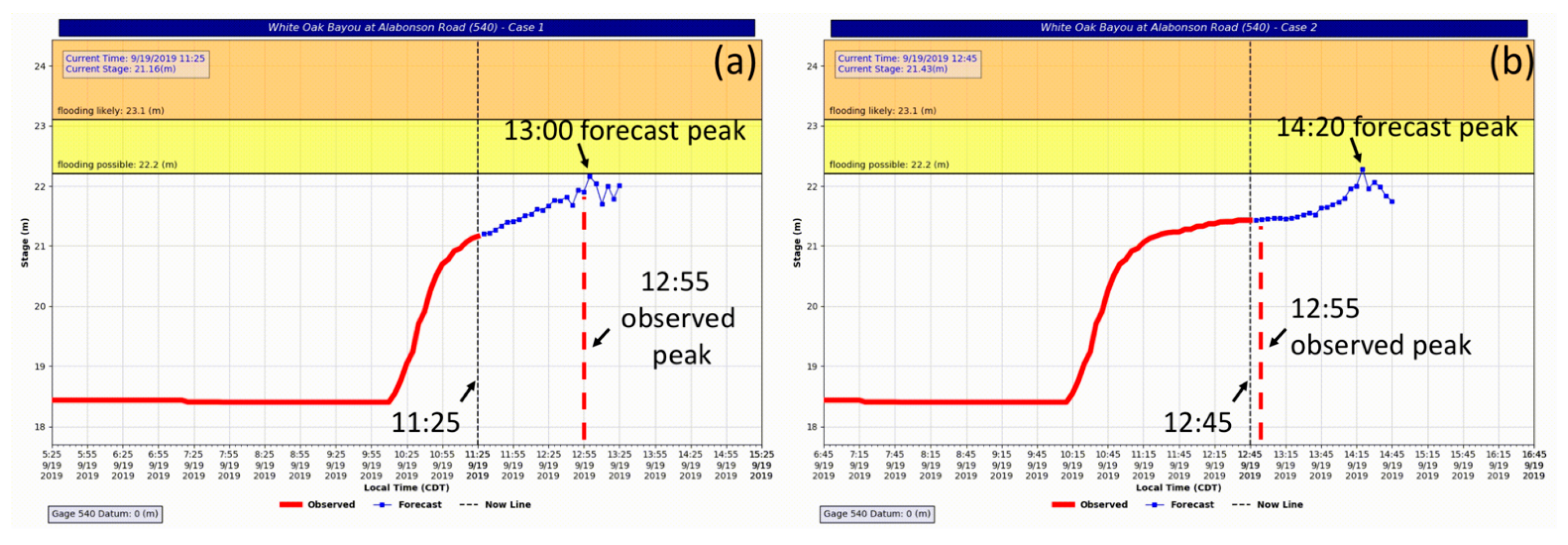
| Figure 13a | 19 September Flood | 540 | S#1 | 95 min (PS) | 90 min (PS) | 5 min |
| Figure 13b | 19 September Flood | 540 | S#2 | 95 min (PS) | 10 min (PS) | 85 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanders, W.; Li, D.; Li, W.; Fang, Z.N. Data-Driven Flood Alert System (FAS) Using Extreme Gradient Boosting (XGBoost) to Forecast Flood Stages. Water 2022, 14, 747. https://doi.org/10.3390/w14050747
Sanders W, Li D, Li W, Fang ZN. Data-Driven Flood Alert System (FAS) Using Extreme Gradient Boosting (XGBoost) to Forecast Flood Stages. Water. 2022; 14(5):747. https://doi.org/10.3390/w14050747
Chicago/Turabian StyleSanders, Will, Dongfeng Li, Wenzhao Li, and Zheng N. Fang. 2022. "Data-Driven Flood Alert System (FAS) Using Extreme Gradient Boosting (XGBoost) to Forecast Flood Stages" Water 14, no. 5: 747. https://doi.org/10.3390/w14050747
APA StyleSanders, W., Li, D., Li, W., & Fang, Z. N. (2022). Data-Driven Flood Alert System (FAS) Using Extreme Gradient Boosting (XGBoost) to Forecast Flood Stages. Water, 14(5), 747. https://doi.org/10.3390/w14050747