
Radar Technology for River Flow Monitoring: Assessment of the Current Status and Future Challenges



Abstract
:1. Introduction
1.1. Motivation
1.2. Principle of Velocity Estimation
1.3. Outline
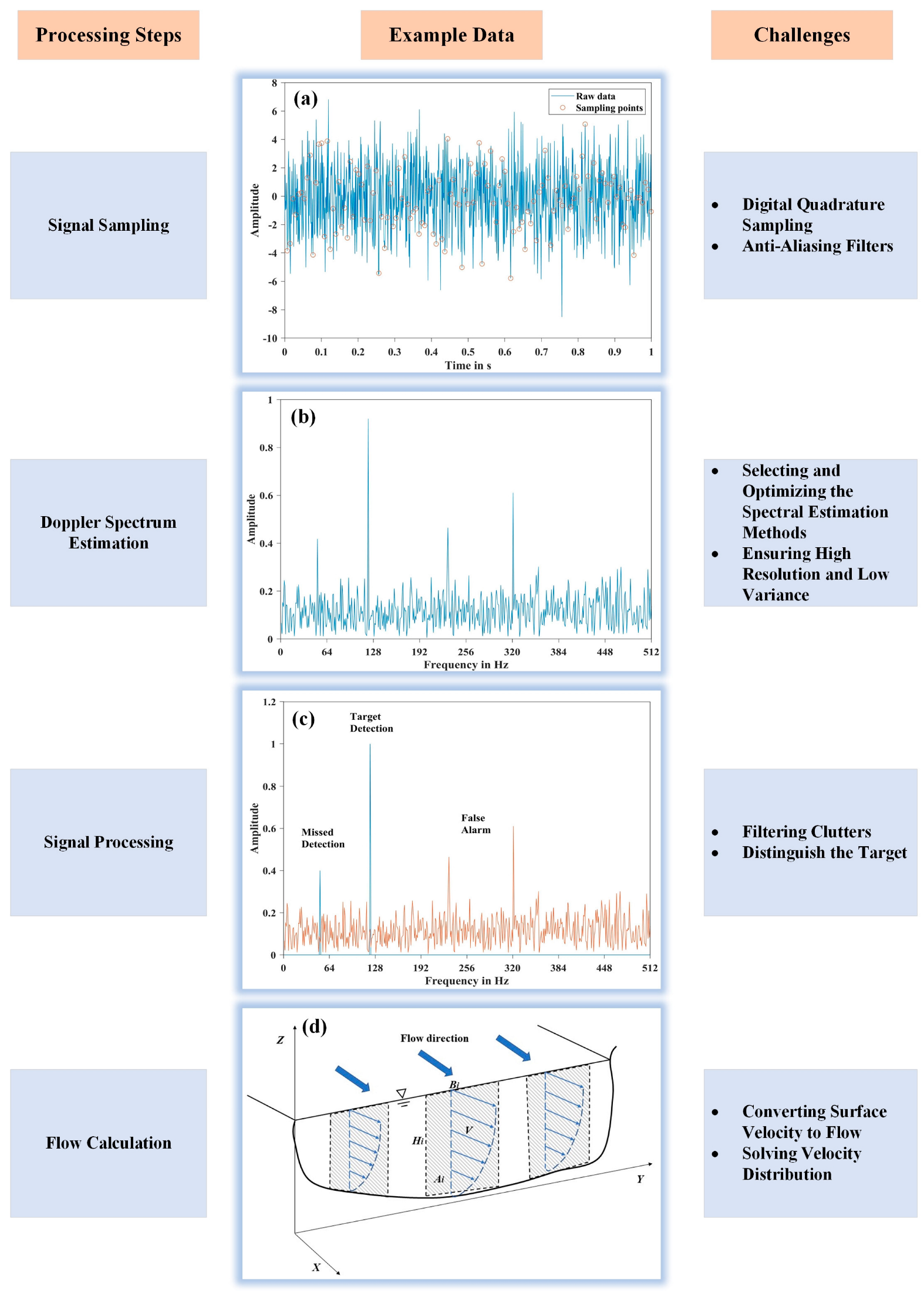
2. The Challenges of Processing River Flow from Raw Radar Data
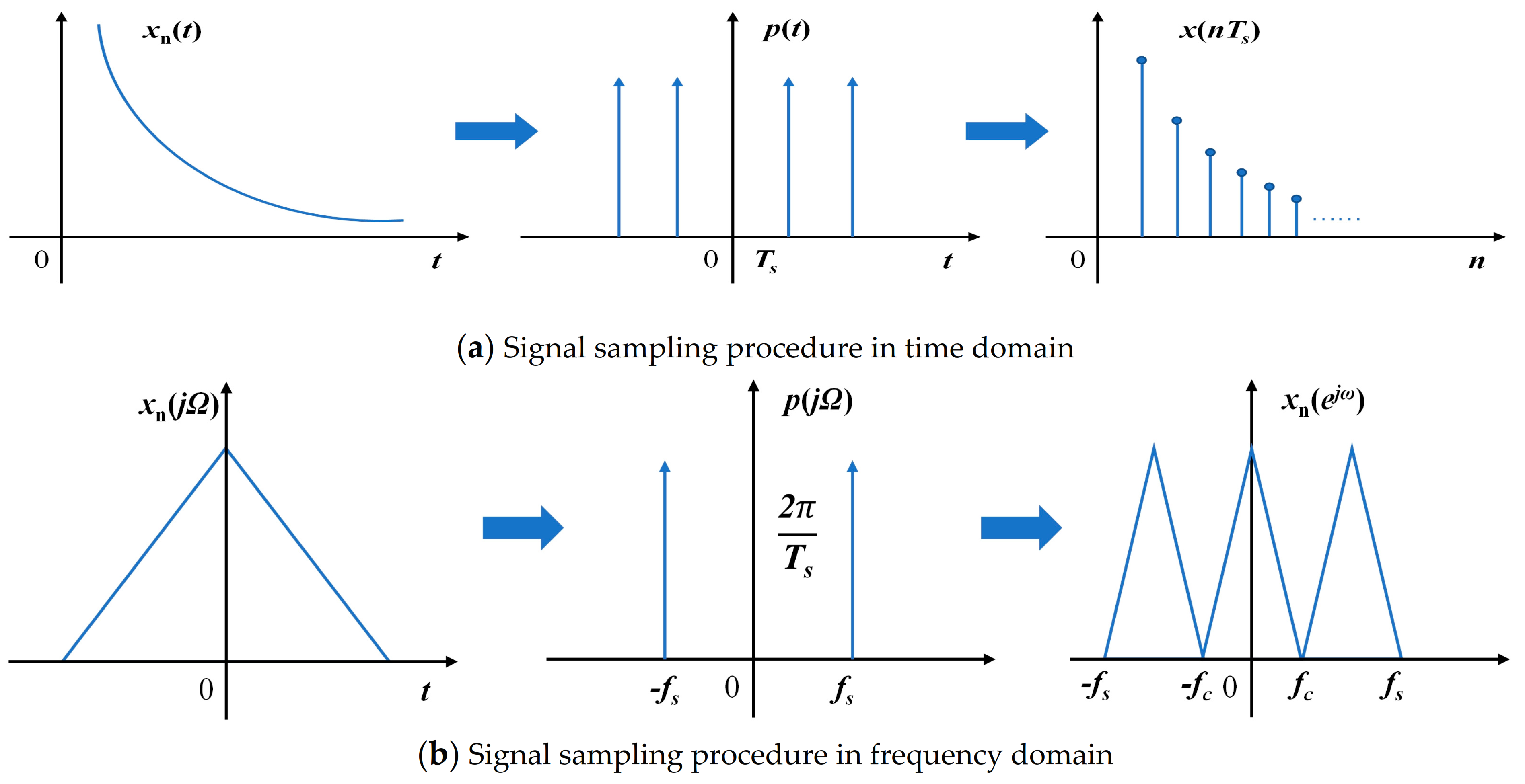
2.1. Signal Sampling
2.2. Doppler Spectrum Estimation
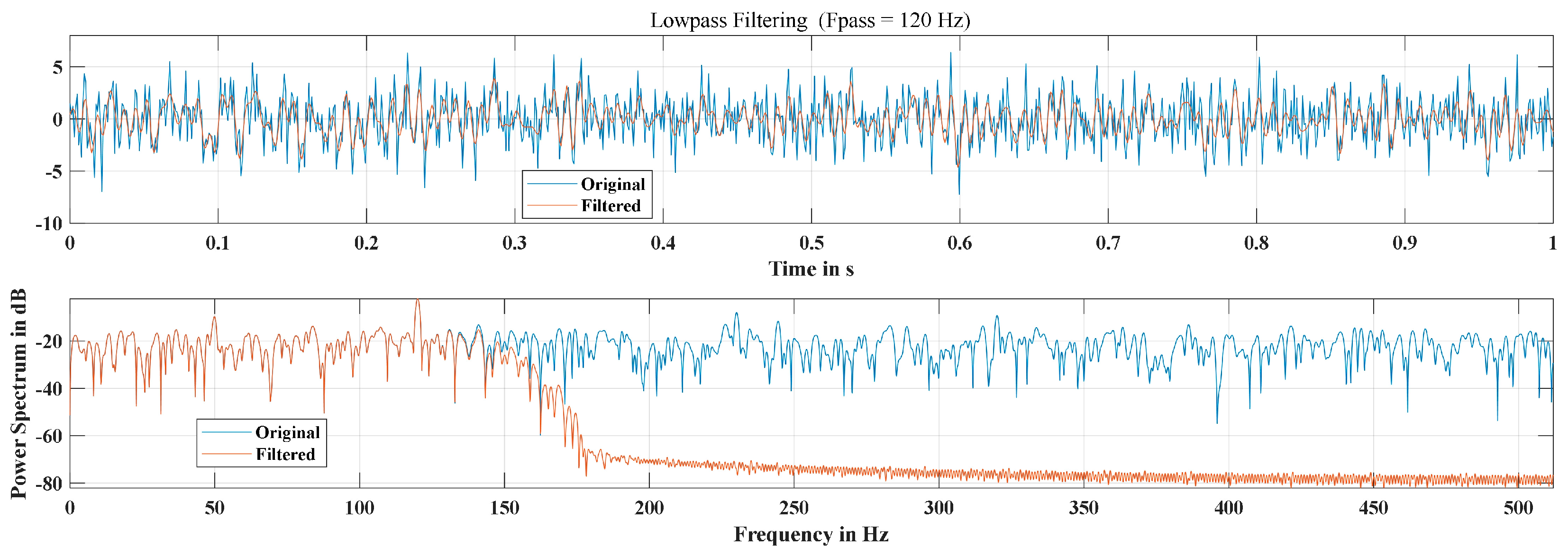
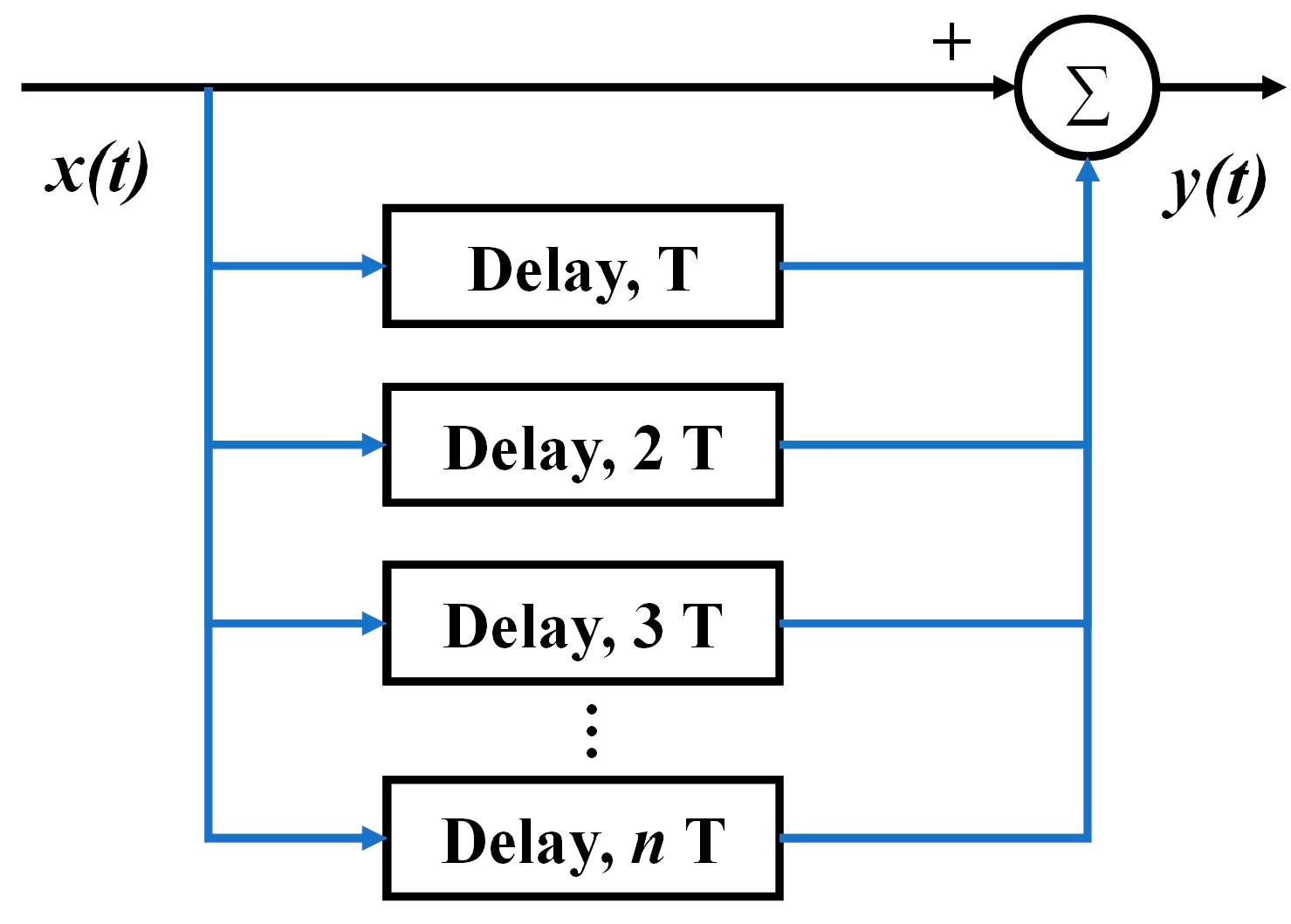
2.3. Signal Processing
2.4. Flow Calculation
3. State-of-the-Art
3.1. Sampling Methods
3.2. Spectrum Estimation Methods
3.2.1. Classical Spectrum Estimation
3.2.2. Modern Spectrum Estimation
3.3. Target Detection Methods
3.3.1. MTI and MTD
3.3.2. CFAR
3.4. Flow Calculation Methods
3.4.1. Index-Velocity Method
- Single point velocity, which measures the velocity at a single point in a river section.
- Depth averaged velocity, which takes into account the river’s average velocity in a vertical direction.
- Horizontal average velocity, which utilizes a certain water layer’s average velocity.
3.4.2. Probability Concept Method
3.4.3. Surface Velocity Coefficients Method
4. Discussion
4.1. Current and Future Limitations
4.2. Future Potentials
4.3. Future Challenges
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Guo, L.; Huang, T.; Zhang, D.; Deng, Z.; Liu, L.; Yan, T. Hydro-environmental response to the inter-basin water resource development in the middle and lower Han River, China. Hydrol. Res. 2021, 53, 141–155. [Google Scholar] [CrossRef]
- Xia, C.; Liu, G.; Zhou, J.; Meng, Y.; Chen, K.; Gu, P.; Yang, M.; Huang, X.; Mei, J. Revealing the impact of water conservancy projects and urbanization on hydrological cycle based on the distribution of hydrogen and oxygen isotopes in water. Environ. Sci. Pollut. Res. 2021, 28, 40160–40177. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Wang, Y.; Xia, J.; Quan, J.; Wang, J. Optimal water resources operation for rivers-connected lake under uncertainty. J. Hydrol. 2021, 595, 125863. [Google Scholar] [CrossRef]
- Li, Z.; Li, Q.; Wang, J.; Feng, Y.; Shao, Q. Impacts of projected climate change on runoff in upper reach of Heihe River basin using climate elasticity method and GCMs. Sci. Total Environ. 2020, 716, 137072. [Google Scholar] [CrossRef] [PubMed]
- Woolway, R.I.; Kraemer, B.M.; Lenters, J.D.; Merchant, C.J.; O’Reilly, C.M.; Sharma, S. Global lake responses to climate change. Nat. Rev. Earth Environ. 2020, 1, 388–403. [Google Scholar] [CrossRef]
- Akter, T.; Quevauviller, P.; Eisenreich, S.J.; Vaes, G. Impacts of climate and land use changes on flood risk management for the Schijn River, Belgium. Environ. Sci. Policy 2018, 89, 163–175. [Google Scholar] [CrossRef]
- Heritage, G.; Entwistle, N.; Milan, D.; Tooth, S. Quantifying and contextualising cyclone-driven, extreme flood magnitudes in bedrock-influenced dryland rivers. Adv. Water Resour. 2019, 123, 145–159. [Google Scholar] [CrossRef]
- Convertino, M.; Annis, A.; Nardi, F. Information-theoretic portfolio decision model for optimal flood management. Environ. Model. Softw. 2019, 119, 258–274. [Google Scholar] [CrossRef]
- Lee, D.; Ward, P.; Block, P. Attribution of Large-Scale Climate Patterns to Seasonal Peak-Flow and Prospects for Prediction Globally. Water Resour. Res. 2018, 54, 916–938. [Google Scholar] [CrossRef]
- Huang, K.L.; Chen, H.; Xiang, T.Y.; Lin, Y.F.; Liu, B.Y.; Wang, J.; Liu, D.D.; Xu, C.Y. A photogrammetry-based variational optimization method for river surface velocity measurement. J. Hydrol. 2022, 605, 127240. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Chen, H.; Liu, B.Y.; Liu, W.G.; Xu, C.Y.; Guo, S.L.; Wang, J. An improvement of the Space-Time Image Velocimetry combined with a new denoising method for estimating river discharge. Flow Meas. Instrum. 2021, 77, 101864. [Google Scholar] [CrossRef]
- Khan, M.R.; Gourley, J.J.; Duarte, J.A.; Vergara, H.; Wasielewski, D.; Ayral, P.A.; Fulton, J.W. Uncertainty in remote sensing of streams using noncontact radars. J. Hydrol. 2021, 603, 126809. [Google Scholar] [CrossRef]
- Fairley, I.; Williamson, B.J.; McIlvenny, J.; King, N.; Masters, I.; Lewis, M.; Neill, S.; Glasby, D.; Coles, D.; Powell, B.; et al. Drone-based large-scale particle image velocimetry applied to tidal stream energy resource assessment. Renew. Energy 2022, 196, 839–855. [Google Scholar] [CrossRef]
- Hannah, P. Heli-gauging flood flows. J. Hydrol. 2014, 53, 163–173. [Google Scholar]
- Gaeuman, D.; Jacobson, R.B. Acoustic bed velocity and bed load dynamics in a large sand bed river. J. Geophys. Res. 2006, 111, 111. [Google Scholar] [CrossRef]
- Chen, Y.C. Flood discharge measurement of a mountain river—Nanshih River in Taiwan. Hydrol. Earth Syst. Sci. 2013, 17, 1951–1962. [Google Scholar] [CrossRef]
- Al Sawaf, M.B.; Kawanisi, K.; Xiao, C. Measuring Low Flowrates of a Shallow Mountainous River Within Restricted Site Conditions and the Characteristics of Acoustic Arrival Times Within Low Flows. Water Resour. Manag. 2020, 34, 3059–3078. [Google Scholar] [CrossRef]
- Geay, T.; Zanker, S.; Hauet, A.; Misset, C.; Recking, A. An estimate of bedload discharge in rivers with passive acoustic measurements: Towards a generalized calibration curve? In Proceedings of the 9th International Conference on Fluvial Hydraulics (River Flow), Lyon, France, 5–8 September 2018.
- Moramarco, T.; Barbetta, S.; Bjerklie, D.M.; Fulton, J.W.; Tarpanelli, A. River Bathymetry Estimate and Discharge Assessment from Remote Sensing. Water Resour. Res. 2019, 55, 6692–6711. [Google Scholar] [CrossRef]
- Langat, P.K.; Kumar, L.; Koech, R. Monitoring river channel dynamics using remote sensing and GIS techniques. Geomorphology 2019, 325, 92–102. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Droogers, P.; de Jong, S.M.; Bierkens, M.F.P. Large-scale monitoring of snow cover and runoff simulation in Himalayan river basins using remote sensing. Remote Sens. Environ. 2009, 113, 40–49. [Google Scholar] [CrossRef]
- Junqueira, A.M.; Mao, F.; Mendes, T.S.G.; Simões, S.J.C.; Balestieri, J.A.P.; Hannah, D.M. Estimation of river flow using CubeSats remote sensing. Sci. Total Environ. 2021, 788, 147762. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, K.; Fujita, I.; Iguchi, M.; Hasegawa, M. Improving Accuracy and Robustness of Space-Time Image Velocimetry (STIV) with Deep Learning. Water 2021, 13, 2079. [Google Scholar] [CrossRef]
- Fujita, I.; Watanabe, H.; Tsubaki, R. Development of a non-intrusive and efficient flow monitoring technique: The space-time image velocimetry (STIV). Int. J. River Basin Manag. 2007, 5, 105–114. [Google Scholar] [CrossRef]
- Fujita, I. Discharge Measurements of Snowmelt Flood by Space-Time Image Velocimetry during the Night Using Far-Infrared Camera. Water 2017, 9, 269. [Google Scholar] [CrossRef]
- Qi, L.; Tan, W.X.; Huang, P.P.; Xu, W.; Qi, Y.L.; Zhang, M.Z. Landslide Prediction Method Based on a Ground-Based Micro-Deformation Monitoring Radar. Remote Sens. 2020, 12, 1230. [Google Scholar] [CrossRef]
- Speight, L.J.; Cranston, M.D.; White, C.J.; Kelly, L. Operational and emerging capabilities for surface water flood forecasting. Wiley Interdiscip. Rev. Water 2021, 8, e1517. [Google Scholar] [CrossRef]
- Chen, F.W.; Liu, C.W. Assessing the applicability of flow measurement by using non-contact observation methods in open channels. Environ. Monit. Assess. 2020, 192, 289. [Google Scholar] [CrossRef]
- Haeni, F.P.; Buursink, M.L.; Costa, J.E.; Melcher, N.B.; Cheng, R.T.; Plant, W.J. Ground-penetrating radar methods used in surface-water discharge measurements. In Proceedings of the 8th International Conference on Ground Penetrating Radar (GPR 2000), Gold Coast, QLD, Australia, 23–26 May 2000; pp. 494–500. [Google Scholar]
- Melcher, N.B.; Costa, J.E.; Haeni, F.P.; Cheng, R.T.; Thurman, E.M.; Buursink, M.; Spicer, K.R.; Hayes, E.; Plant, W.J.; Keller, W.C.; et al. River discharge measurements by using helicopter-mounted radar. Geophys. Res. Lett. 2002, 29, 41–44. [Google Scholar] [CrossRef]
- Lee, M.-C.; Lai, C.-J.; Leu, J.-M.; Plant, W.J.; Keller, W.C.; Hayes, K. Non-contact flood discharge measurements using an X-band pulse radar (I) theory. Flow Meas. Instrum. 2002, 13, 265–270. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C.; Siani, C.; Chatham, G.; IEEE. River current measurement using coherent microwave radar: Toward gaging unstable streams. In Proceedings of the 9th Working Conference on Current Measurement Technology, Charleston, SC, USA, 17–19 March 2008; pp. 245–249. [Google Scholar]
- Kuang, C.M.; Wang, C.J.; Wen, B.Y.; Huang, W.M. An Applied Method for Clustering Extended Targets With UHF Radar. IEEE Access 2020, 8, 98670–98678. [Google Scholar] [CrossRef]
- Yang, S.L.; Ke, H.Y.; Wu, X.B.; Tian, J.S.; Hou, J.C. HF radar ocean current algorithm based on MUSIC and the validation experiments. IEEE J. Ocean. Eng. 2005, 30, 601–618. [Google Scholar] [CrossRef]
- Emery, B.M. Evaluation of Alternative Direction-of-Arrival Methods for Oceanographic HF Radars. IEEE J. Ocean. Eng. 2020, 45, 990–1003. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C. Evidence of Bragg Scattering in Microwave Doppler Spectra of Sea Return. J. Geophys. Res. Oceans 1990, 95, 16299–16310. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Niizato, K. Flood Discharge Observation Using Radio Current Meter. Jpn. Soc. Civil Eng. 1994, 28, 41–50. [Google Scholar] [CrossRef] [PubMed]
- Costa, J.E.; Spicer, K.R.; Cheng, R.T.; Haeni, P.F.; Melcher, N.B.; Thurman, E.M.; Plant, W.J.; Keller, W.C. Measuring stream discharge by non-contact methods: A proof-of-concept experiment. Geophys. Res. Lett. 2000, 27, 553–556. [Google Scholar] [CrossRef]
- Teague, C.C.; Barrick, D.E.; Lilleboe, P.; Cheng, R.T. Canal and river tests of a RiverSonde streamflow measurement system. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future, IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, NSW, Australia, 9–13 July 2001; Volume 1283, pp. 1288–1290. [Google Scholar]
- Ma, Z.G.; Wen, B.Y.; Zhou, H.; Wang, C.J.; Yan, W.D. UHF surface currents radar hardware system design. IEEE Microw. Wirel. Compon. Lett. 2005, 15, 904–906. [Google Scholar] [CrossRef]
- Ma, Z.G.; Wen, B.Y.; Wang, C.J.; Yan, W.D. UHF Surface Velocities Radar System design. In Proceedings of the IEEE Conference on Electron Devices and Solid-State Circuits, Kowloon, China, 19–21 December 2005; pp. 431–433. [Google Scholar]
- Li, K.; Wen, B.Y.; Xu, Y.M.; Tan, J.; Yang, J.; Liu, Y. A novel UHF radar system design for river dynamics monitoring. IEICE Electron. Express 2015, 12, 20141074. [Google Scholar] [CrossRef]
- Mason, R.R., Jr.; John, E. A Proposed Radar-Based Streamflow Measurement System For The San Joaquin River at Vernalis, California. Hydraul. Meas. Exp. Methods 2002, 2002, 1–8. [Google Scholar]
- Hong, J.H.; Guo, W.D.; Wang, H.W.; Yeh, P.H. Estimating discharge in gravel-bed river using non-contact ground-penetrating and surface-velocity radars. River Res. Appl. 2017, 33, 1177–1190. [Google Scholar] [CrossRef]
- Wen, B.Y.; Ma, Z.G.; Yuan, F.; Zhou, H. Hardware system design for UHF surface velocities radar. J. Syst. Eng. Electron. 2007, 18, 255–258. [Google Scholar]
- Wang, S.C.; Wen, B.Y.; Wang, C.J.; Yan, Z.S.; Li, K.; Yang, J. UHF Surface Dynamics Parameters Radar Design and Experiment. IEEE Microw. Wirel. Compon. Lett. 2014, 24, 65–67. [Google Scholar] [CrossRef]
- Chen, Y.C.; Kao, S.P.; Wu, J.H. Measurement of stream cross section using ground penetration radar with Hilbert-Huang transform. Hydrol. Processes 2014, 28, 2468–2477. [Google Scholar] [CrossRef]
- Du, K.L.; Lai, A.K.Y.; Cheng, K.K.M.; Swamy, M.N.S. Neural methods for antenna array signal processing: A review. Signal Process. 2002, 82, 547–561. [Google Scholar] [CrossRef]
- Zavol’skii, N.A.; Malekhanov, A.I.; Raevskii, M.A.; Smirnov, A.V. Effects of Wind Waves on Horizontal Array Performance in Shallow-Water Conditions. Acoust. Phys. 2017, 63, 542–552. [Google Scholar] [CrossRef]
- Lee, M.C.; Leu, J.M.; Lai, C.J.; Plant, W.J.; Keller, W.C.; Hayes, K. Non-contact flood discharge measurements using an X-band pulse radar (II) Improvements and applications. Flow Meas. Instrum. 2002, 13, 271–276. [Google Scholar] [CrossRef]
- Fulton, J.; Ostrowski, J. Measuring real-time streamflow using emerging technologies: Radar, hydroacoustics, and the probability concept. J. Hydrol. 2008, 357, 1–10. [Google Scholar] [CrossRef]
- Fulton, J.W.; Mason, C.A.; Eggleston, J.R.; Nicotra, M.J.; Chiu, C.-L.; Henneberg, M.F.; Best, H.R.; Cederberg, J.R.; Holnbeck, S.R.; Lotspeich, R.R.; et al. Near-Field Remote Sensing of Surface Velocity and River Discharge Using Radars and the Probability Concept at 10 U.S. Geological Survey Streamgages. Remote Sens. 2020, 12, 1296. [Google Scholar] [CrossRef]
- Li, Z.L.; Tang, L. A Study on the Detection of River speed Based on UHF Radar Data. In Proceedings of the 26th International Conference on Systems Engineering (ICSEng), Sydney, NSW, Australia, 18–20 December 2018. [Google Scholar]
- Yang, Y.H.; Wen, B.Y.; Wang, C.J.; Hou, Y.D. Two-dimensional velocity distribution modeling for natural river based on UHF radar surface current. J. Hydrol. 2019, 577, 123930. [Google Scholar] [CrossRef]
- Yang, Y.H.; Wen, B.Y.; Wang, C.J.; Hou, Y.D. Real-Time and Automatic River Discharge Measurement With UHF Radar. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1851–1855. [Google Scholar] [CrossRef]
- Coman, I.M. Christian Andreas Doppler—The man and his legacy. Eur. J. Echocardiogr. 2005, 6, 7–10. [Google Scholar] [CrossRef]
- Plant, W.J. A model for microwave Doppler sea return at high incidence angles: Bragg scattering from bound, tilted waves. J. Geophys. Res. Oceans 1997, 102, 21131–21146. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C.; Hayes, K. Measurement of river surface currents with coherent microwave systems. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1242–1257. [Google Scholar] [CrossRef]
- Lee, P.H.Y.; Barter, J.D.; Beach, K.L.; Hindman, C.L.; Lake, B.M.; Rungaldier, H.; Thompson, H.R.; Yee, R. Experiments on Bragg and non-Bragg scattering using single-frequency and chirped radars. Radio Sci. 1997, 32, 1725–1744. [Google Scholar] [CrossRef]
- Lee, P.H.Y.; Barter, J.D.; Beach, K.L.; Hindman, C.L.; Lake, B.M.; Rungaldier, H.; Shelton, J.C.; Williams, A.B.; Yee, R.; Yuen, H.C. X-Band Microwave Backscattering from Ocean Waves. J. Geophys. Res. Oceans 1995, 100, 2591–2611. [Google Scholar] [CrossRef]
- Scharf, P.A.; Mutschler, M.A.; Iberle, J.; Mantz, H.; Walter, T.; Waldschmidt, C. Spectroscopic Estimation of Surface Roughness Depth for mm-Wave Radar Sensors. In Proceedings of the 16th European Radar Conference (EuRAD)/European Microwave Week, Paris, France, 2–4 October 2019; pp. 93–96. [Google Scholar]
- Smith, G.E.; Diethe, T.; Hussain, Z.; Shawe-Taylor, J.; Hardoon, D.R. Compressed Sampling For Pulse Doppler Radar. In Proceedings of the 2010 IEEE Radar Conference, Washington, DC, USA, 10–14 May 2010; pp. 887–892. [Google Scholar]
- Lang, O.; Feger, R.; Hofbauer, C.; Huemer, M. OFDM Radar With Subcarrier Aliasing-Reducing the ADC Sampling Frequency Without Losing Range Resolution. IEEE Trans. Veh. Technol. 2022, 71, 10241–10253. [Google Scholar] [CrossRef]
- Park, C.W.; Kim, Y.S.; Han, M.S. A Comparative Study of Frequency Estimation Techniques. In Proceedings of the Transmission and Distribution Conference and Exposition—Asia and Pacific, Seoul, Republic of Korea, 26–30 October 2009; pp. 1–5. [Google Scholar]
- Reza, M.S.; Hossain, M.M.; Agelidis, V.G. Fast and accurate frequency estimation in distorted grids using a three-sample based algorithm. IET Gener. Transm. Distribut. 2019, 13, 4242–4248. [Google Scholar] [CrossRef]
- Rui, L.Y.; Chen, S.J.; Ho, K.C.; Rantz, M.; Skubic, M. Estimation of human walking speed by Doppler radar for elderly care. J. Ambient Intell. Smart Environ. 2017, 9, 181–191. [Google Scholar] [CrossRef]
- Busarello, T.D.C.; Sambugari, S.L.; da Silva, N. Zero-Crossing Detection Frequency Estimator Method Combined with a Kalman Filter for Non-ideal Power Grid. In Proceedings of the IEEE 15th Brazilian Power Electronics Conference (COBEP)/5th IEEE Southern Power Electronics Conference (SPEC), Santos, Brazil, 1–4 December 2019. [Google Scholar]
- Bujakovic, D.; Andric, M.; Bondzulic, B.; Mitrovic, S.; Simic, S. Time-Frequency Distribution Analyses of Ku-Band Radar Doppler Echo Signals. Frequenz 2015, 69, 119–128. [Google Scholar] [CrossRef]
- Chen, T.W.; Jin, W.D.; Chen, Z.X. Feature Extraction Using Wavelet Transform for Radar Emitter Signals. In Proceedings of the WRI International Conference on Communications and Mobile Computing, Kunming, China, 6–8 January 2009; pp. 414–418. [Google Scholar]
- Sun, G.Q.; Zhang, F.Z.; Pan, S.L.; Ye, X.W. Frequency-domain versus time-domain imaging for photonics-based broadband radar. Electron. Lett. 2020, 56, 1330–1332. [Google Scholar] [CrossRef]
- Zhao, D.W.; Wang, J.; Chen, G.; Wang, J.P.; Guo, S. Clutter Cancellation Based on Frequency Domain Analysis in Passive Bistatic Radar. IEEE Access 2020, 8, 43956–43964. [Google Scholar] [CrossRef]
- Bauer, M.; Ritter, F.; Siegmund, G. High-precision laser vibrometers based on digital Doppler-signal processing. In Proceedings of the 5th International Conference on Vibration Measurements by Laser Techniques, Ancona, Italy, 18–21 June 2002; pp. 50–61. [Google Scholar]
- Chang, Z.H.; Zhang, Y.; Chen, W.B. Electricity price prediction based on hybrid model of adam optimized LSTM neural network and wavelet transform. Energy 2019, 187, 115804. [Google Scholar] [CrossRef]
- Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Burriel-Valencia, J.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. New Method for Spectral Leakage Reduction in the FFT of Stator Currents: Application to the Diagnosis of Bar Breakages in Cage Motors Working at Very Low Slip. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, S.; Liu, H.; Wang, H. Radar detection during tracking with constant track false alarm rate. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–5. [Google Scholar]
- Anitori, L.; Otten, M.; Van Rossum, W.; Maleki, A.; Baraniuk, R. Compressive CFAR radar detection. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 0320–0325. [Google Scholar]
- Bahmanpouri, F.; Eltner, A.; Barbetta, S.; Bertalan, L.; Moramarco, T. Estimating the Average River Cross-Section Velocity by Observing Only One Surface Velocity Value and Calibrating the Entropic Parameter. Water Resour. Res. 2022, 58, e2021WR031821. [Google Scholar] [CrossRef]
- Genç, O.; Ardıçlıoğlu, M.; Ağıralioğlu, N. Calculation of mean velocity and discharge using water surface velocity in small streams. Flow Meas. Instrum. 2015, 41, 115–120. [Google Scholar] [CrossRef]
- Ghelfi, P.; Laghezza, F.; Scotti, F.; Serafino, G.; Capria, A.; Pinna, S.; Onori, D.; Porzi, C.; Scaffardi, M.; Malacarne, A.; et al. A fully photonics-based coherent radar system. Nature 2014, 507, 341–345. [Google Scholar] [CrossRef]
- Bar-Ilan, O.; Eldar, Y.C. Sub-Nyquist Radar via Doppler Focusing. IEEE Transs Signal Process. 2014, 62, 1796–1811. [Google Scholar] [CrossRef]
- Ender, J.H.G. On compressive sensing applied to radar. Signal Process. 2010, 90, 1402–1414. [Google Scholar] [CrossRef]
- Pellon, L.E. A Double Nyquist Digital Product Detector for Quadrature Sampling. IEEE Trans. Signal Process. 1992, 40, 1670–1681. [Google Scholar] [CrossRef]
- Duda, K. DFT interpolation algorithm for Kaiser–Bessel and Dolph–Chebyshev windows. IEEE Trans. Instrum. Meas. 2011, 60, 784–790. [Google Scholar] [CrossRef]
- Cizek, V. Discrete hilbert transform. IEEE Trans. Audio Electroacoust. 1970, 18, 340–343. [Google Scholar] [CrossRef]
- Kose, K.; Cetin, A.E. Low-pass filtering of irregularly sampled signals using a set theoretic framework. IEEE Signal Process. Mag. 2011, 28, 117–121. [Google Scholar] [CrossRef]
- Shirui, P.; Quan, L.; Wenfeng, D.; Feng, H. Image Rejection Research on Digital IF Quadrature Detector for Complex Band-pass Signal. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; pp. 1–4. [Google Scholar]
- Li, L.; He, H. Research on power spectrum estimation based on periodogram and burg algorithm. In Proceedings of the 2010 International Conference on Computer Application and System Modeling (ICCASM 2010), Taiyuan, China, 22–24 October 2010; pp. V3-695–V3-698. [Google Scholar]
- Höll, M.; Kantz, H. The relationship between the detrendend fluctuation analysis and the autocorrelation function of a signal. Eur. Phys. J. B 2015, 88, 327. [Google Scholar] [CrossRef]
- Alimenti, F.; Bonafoni, S.; Gallo, E.; Palazzi, V.; Gatti, R.V.; Mezzanotte, P.; Roselli, L.; Zito, D.; Barbetta, S.; Corradini, C.; et al. Noncontact Measurement of River Surface Velocity and Discharge Estimation With a Low-Cost Doppler Radar Sensor. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5195–5207. [Google Scholar] [CrossRef]
- Kashyap, R.L. Optimal Choice of AR and MA Parts in Autoregressive Moving Average Models. IEEE Trans. Pattern. Anal. Mach. Intell. 1982, 4, 99–104. [Google Scholar] [CrossRef] [PubMed]
- Zheng, C.S.; Zhou, M.Y.; Li, X.D. On the relationship of non-parametric methods for coherence function estimation. Signal Process. 2008, 88, 2863–2867. [Google Scholar] [CrossRef]
- Bechet, P.; Mitran, R.; Munteanu, M. A non-contact method based on multiple signal classification algorithm to reduce the measurement time for accurately heart rate detection. Rev. Sci. Instrum. 2013, 84, 084707. [Google Scholar] [CrossRef]
- Brockwell, P.; Dahlhaus, R. Generalized Levinson–Durbin and burg algorithms. J. Econom. 2004, 118, 129–149. [Google Scholar] [CrossRef]
- Bos, R.; de Waele, S.; Broersen, P.M.T. Autoregressive spectral estimation by application of the Burg algorithm to irregularly sampled data. IEEE Trans. Instrum. Meas. 2002, 51, 1289–1294. [Google Scholar] [CrossRef]
- Übeylı, E.D.; Güler, İ. Spectral analysis of internal carotid arterial Doppler signals using FFT, AR, MA, and ARMA methods. Comput. Biol. Med. 2004, 34, 293–306. [Google Scholar] [CrossRef]
- Teague, C.C. Root-MUSIC direction finding applied to multifrequency coastal radar. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2002)/24th Canadian Symposium on Remote Sensing, Toronto, ON, Canada, 24–28 June 2002; pp. 1896–1898. [Google Scholar]
- Wen, L.; Zhong, C.; Huang, X.; Ding, J. Sea Clutter Suppression Based on Selective Reconstruction of Features. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019; pp. 1–6. [Google Scholar]
- Ender, J.H.G.; Gierull, C.H.; Cerutti-Maori, D. Improved Space-Based Moving Target Indication via Alternate Transmission and Receiver Switching. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3960–3974. [Google Scholar] [CrossRef]
- Cristallini, D.; Pastina, D.; Colone, F.; Lombardo, P. Efficient Detection and Imaging of Moving Targets in SAR Images Based on Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2403–2416. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, Q.; Yao, D.; Deng, W.B. Main-Lobe Cancellation of the Space Spread Clutter for Target Detection in HFSWR. IEEE J. Sel. Topics Signal Process. 2015, 9, 1632–1638. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Zhang, L.R.; Zhou, Y.; Lin, C.H.; Tang, S.Y.; Wan, J. Non-adaptive space-time clutter canceller for multi-channel synthetic aperture radar. IET Signal Process. 2019, 13, 472–479. [Google Scholar] [CrossRef]
- Carrera, E.V.; Lara, F.; Ortiz, M.; Tinoco, A.; León, R. Target Detection using Radar Processors based on Machine Learning. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–5. [Google Scholar]
- Candan, C.; Yilmaz, A.O. Efficient methods of clutter suppression for coexisting land and weather clutter systems. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1641–1650. [Google Scholar] [CrossRef]
- Peng, S.-B.; Xu, J.; Xia, X.-G.; Liu, F.; Long, T.; Yang, J.; Peng, Y.-N. Multiaircraft formation identification for narrowband coherent radar in a long coherent integration time. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2121–2137. [Google Scholar] [CrossRef]
- Vaidyanathan, P.; Pal, P.; Chen, C.-Y. MIMO radar with broadband waveforms: Smearing filter banks and 2D virtual arrays. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 188–192. [Google Scholar]
- Petrović, V.L.; Janković, M.M.; Lupšić, A.V.; Mihajlović, V.R.; Popović-Božović, J.S. High-accuracy real-time monitoring of heart rate variability using 24 GHz continuous-wave Doppler radar. IEEE Access 2019, 7, 74721–74733. [Google Scholar] [CrossRef]
- Mohammed, A.S.; Amamou, A.; Ayevide, F.K.; Kelouwani, S.; Agbossou, K.; Zioui, N. The perception system of intelligent ground vehicles in all weather conditions: A systematic literature review. Sensors 2020, 20, 6532. [Google Scholar] [CrossRef]
- Vriesman, D.; Thoresz, B.; Steinhauser, D.; Zimmer, A.; Britto, A.; Brandmeier, T. An experimental analysis of rain interference on detection and ranging sensors. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–5. [Google Scholar]
- Gao, G.; Liu, L.; Zhao, L.; Shi, G.; Kuang, G. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2008, 47, 1685–1697. [Google Scholar] [CrossRef]
- Finn, H. Adaptive detection mode with threshold control as a function of spatially sampled clutter-level estimates. RCA Rev. 1968, 29, 414–465. [Google Scholar]
- Trunk, G.V. Range Resolution of Targets Using Automatic Detectors. IEEE Trans. Aerosp. Electron. Syst. 1978, AES-14, 750–755. [Google Scholar] [CrossRef]
- Hansen, V.G.; Sawyers, J.H. Detectability Loss Due To Greatest of Selection in a Cell-Averaging Cfar. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 115–118. [Google Scholar] [CrossRef]
- Rohling, H. Radar CFAR thresholding in clutter and multiple target situations. IEEE Trans. Aerosp. Electron. Syst. 1983, 19, 608–621. [Google Scholar] [CrossRef]
- Nathanson, F.E.; Reilly, J.P.; Cohen, M.N. Radar design principles-Signal processing and the Environment. NASA STI/Recon Technical Report A 1991, 91, 46747. [Google Scholar]
- Ocio, D.; Le Vine, N.; Westerberg, I.; Pappenberger, F.; Buytaert, W. The role of rating curve uncertainty in real-time flood forecasting. Water Resour. Res. 2017, 53, 4197–4213. [Google Scholar] [CrossRef]
- Liu, C.; Wen, B.; Duan, Z.; Tian, Y. Measurement of Mountain River Discharge Based on UHF Radar. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Levesque, V.A.; Oberg, K.A. Computing Discharge Using the Index Velocity Method; US Department of the Interior, US Geological Survey: Reston, VA, USA, 2012. [Google Scholar]
- Chiu, C.L. Entropy and 2-D Velocity Distribution in Open Channels. J. Hydraul. Eng. ASCE 1988, 114, 738–756. [Google Scholar] [CrossRef]
- Vyas, J.K.; Perumal, M.; Moramarco, T. Discharge Estimation Using Tsallis and Shannon Entropy Theory in Natural Channels. Water 2020, 12, 1786. [Google Scholar] [CrossRef]
- Chiu, C.L.; Chen, Y.C. A fast method of discharge measurement in open-channel flow. In Proceedings of the International Water Resources Engineering Conference, Memphis, TN, USA, 3–7 August 1998; pp. 1721–1726. [Google Scholar]
- Chen, Y.-C.; Yang, T.-M.; Hsu, N.-S.; Kuo, T.-M. Real-time discharge measurement in tidal streams by an index velocity. Environ. Monitor.Assess. 2012, 184, 6423–6436. [Google Scholar] [CrossRef]
- Abrari, E.; Beirami, M.K.; Ergil, M. Prediction of the discharges within exponential and generalized trapezoidal channel cross-sections using three velocity points. Flow Meas. Instrum. 2017, 54, 27–38. [Google Scholar] [CrossRef]
- ISO 748:2007; Hydrometry—Measurement of liquid flow in open channels using current-meters or floats. Slovenian Institute for Standardization: Ljubljana, Slovenia, 2007.
- Hauet, A.; Morlot, T.; Daubagnan, L. Velocity profile and depth-averaged to surface velocity in natural streams: A review over alarge sample of rivers. In Proceedings of the Ninth International Conference on Fluvial Hydraulics, Lyon, France, 5–8 September 2018; p. 06015. [Google Scholar]
- Chen, Y.C.; Liao, Y.J.; Chen, W.L. Discharge estimation in lined irrigation canals by using surface velocity radar. Paddy Water Environ. 2018, 16, 857–866. [Google Scholar] [CrossRef]
- Fonseca, D.S.; Netto, A.A.; Ferreira, R.B.; De Sa, A.M. Lomb-scargle periodogram applied to heart rate variability study. In Proceedings of the 2013 ISSNIP Biosignals and Biorobotics Conference: Biosignals and Robotics for Better and Safer Living (BRC), Rio de Janeiro, Brazil, 18–20 February 2013; pp. 1–4. [Google Scholar]
- Jwo, D.J.; Chang, W.Y.; Wu, I.H. Windowing Techniques, the Welch Method for Improvement of Power Spectrum Estimation. CMC Comput. Mater. Continua 2021, 67, 3983–4003. [Google Scholar] [CrossRef]
- Yu, Z.; Li, J.; Guo, Q.; Ding, J. Efficient direct target localization for distributed MIMO radar with expectation propagation and belief propagation. IEEE Trans. Signal Process. 2021, 69, 4055–4068. [Google Scholar] [CrossRef]
- Goldstein, G. False-alarm regulation in log-normal and Weibull clutter. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 84–92. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Advantages | Disadvantages |
|---|---|---|
| CA-CFAR | High detection performance in the case of uniform clutter background. | The detection performance degrades in multiple targets and the clutter edge condition. |
| SO-CFAR | Good detection performance in the case of multiple targets | The probability of false alarm rises in the clutter edge condition. |
| GO-CFAR | Robust edge clutter resistance. | Multiple targets increase the likelihood of false alarms and decrease the detection performance. |
| OS-CFAR | Great detection performance in multiple targets circumstances. Good anti-clutter edge capabilities. | High false alarm loss due to the influence of k-value. Time-consuming process, and high hardware requirements. |
| Pretty Coarse | Coarse | Normal | Smooth | |
| m | 1–2 | 3–4 | 5–7 | 8–10 |
| ηs | 0.50–0.67 | 0.75–0.80 | 0.83–0.88 | 0.89–0.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Chen, H.; Liu, B.; Huang, K.; Wu, Z.; Yan, K. Radar Technology for River Flow Monitoring: Assessment of the Current Status and Future Challenges. Water 2023, 15, 1904. https://doi.org/10.3390/w15101904
Huang Y, Chen H, Liu B, Huang K, Wu Z, Yan K. Radar Technology for River Flow Monitoring: Assessment of the Current Status and Future Challenges. Water. 2023; 15(10):1904. https://doi.org/10.3390/w15101904
Chicago/Turabian StyleHuang, Yu, Hua Chen, Bingyi Liu, Kailin Huang, Zeheng Wu, and Kang Yan. 2023. "Radar Technology for River Flow Monitoring: Assessment of the Current Status and Future Challenges" Water 15, no. 10: 1904. https://doi.org/10.3390/w15101904
APA StyleHuang, Y., Chen, H., Liu, B., Huang, K., Wu, Z., & Yan, K. (2023). Radar Technology for River Flow Monitoring: Assessment of the Current Status and Future Challenges. Water, 15(10), 1904. https://doi.org/10.3390/w15101904