
Remote Sensing with UAVs for Modeling Floods: An Exploratory Approach Based on Three Chilean Rivers

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
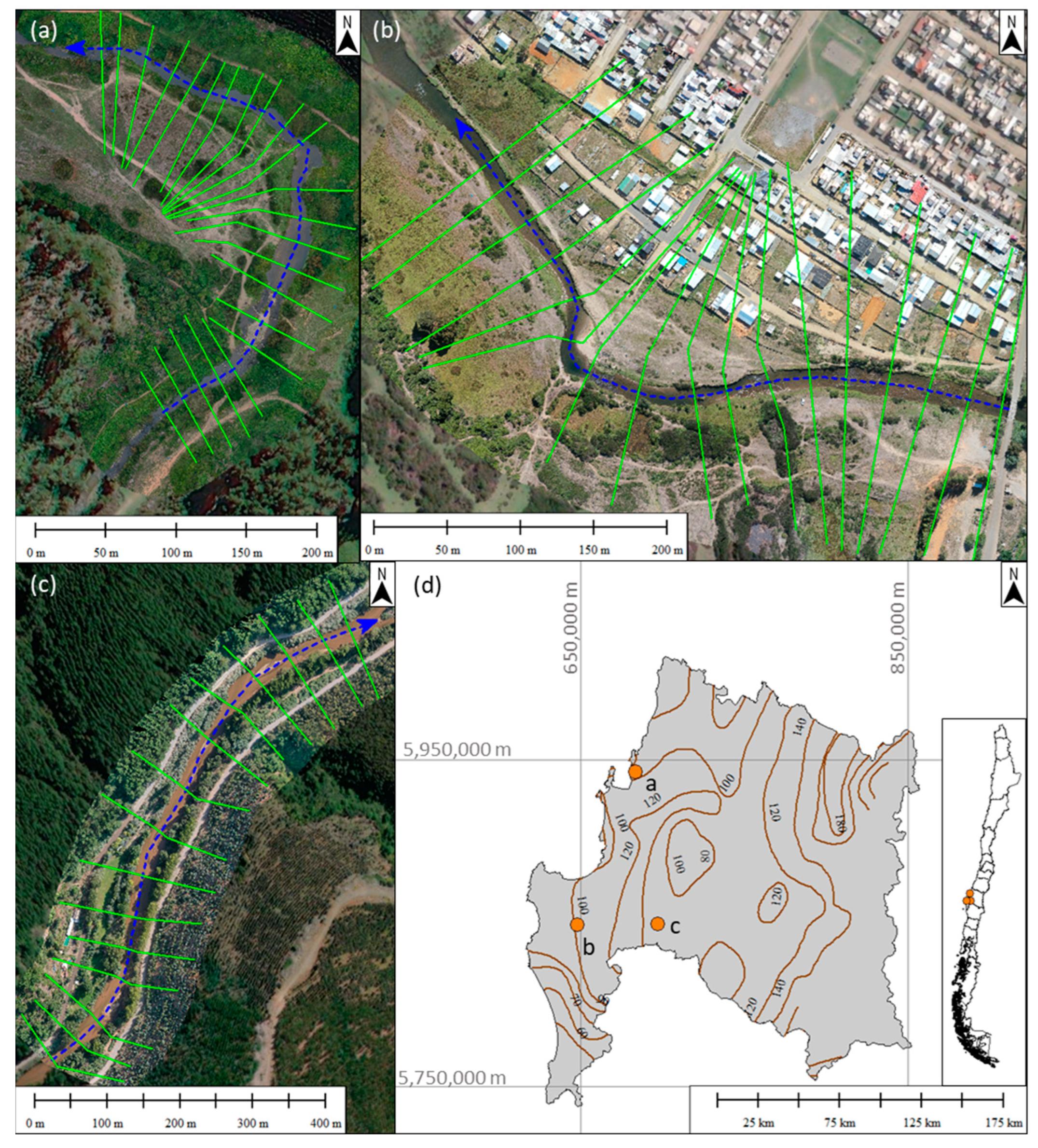
2.1. Study Area
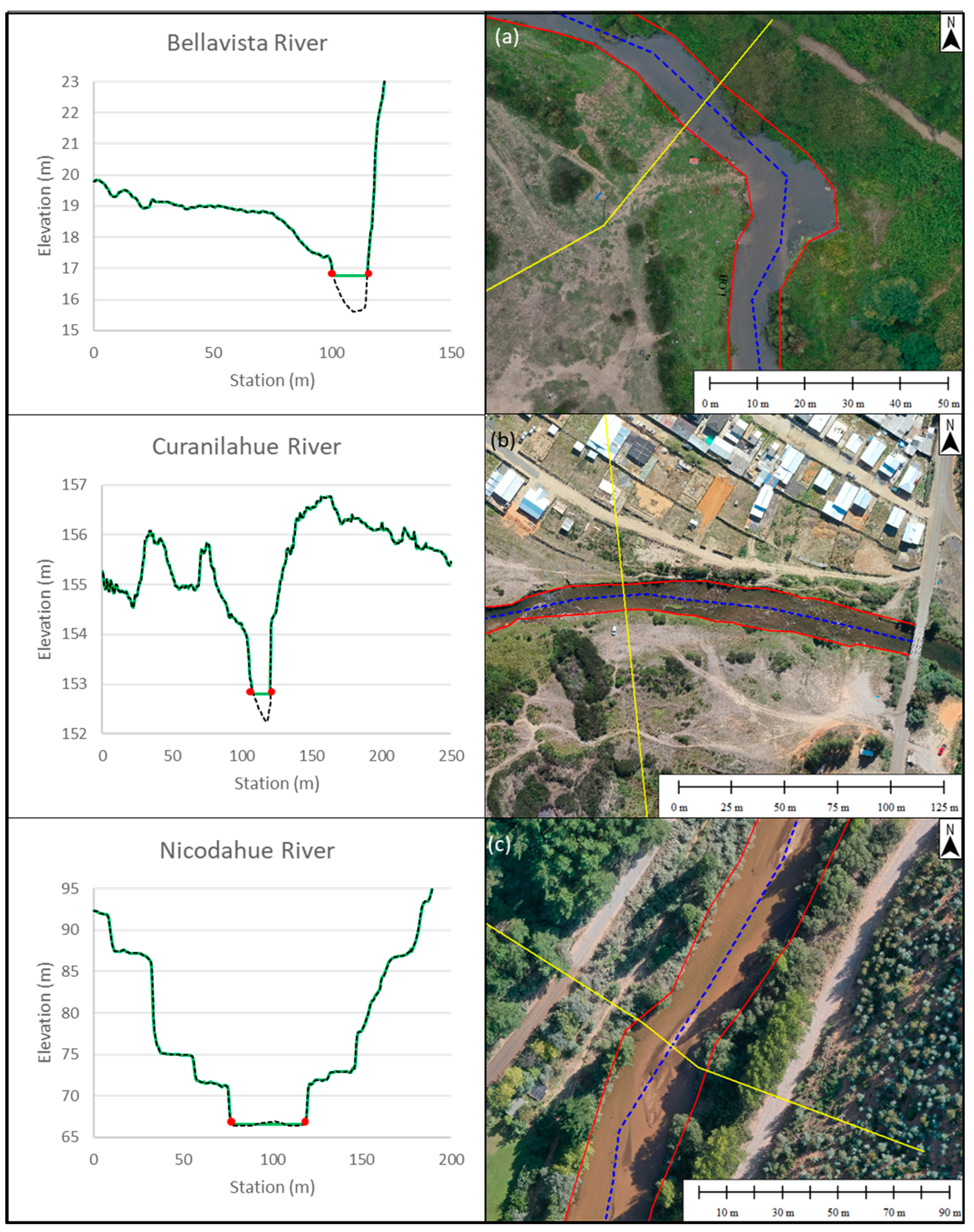
2.2. Morphological Channel Classification
2.3. Field Measurements
2.4. DTM-Traditional (DTM-T) and DTM-Remote Sensing (DTM-RS)
2.5. Flow Discharge Data
2.6. Hydraulic Modeling
3. Results
3.1. DTM-T and DTM-RS Results
3.2. Variables for Morphological Description
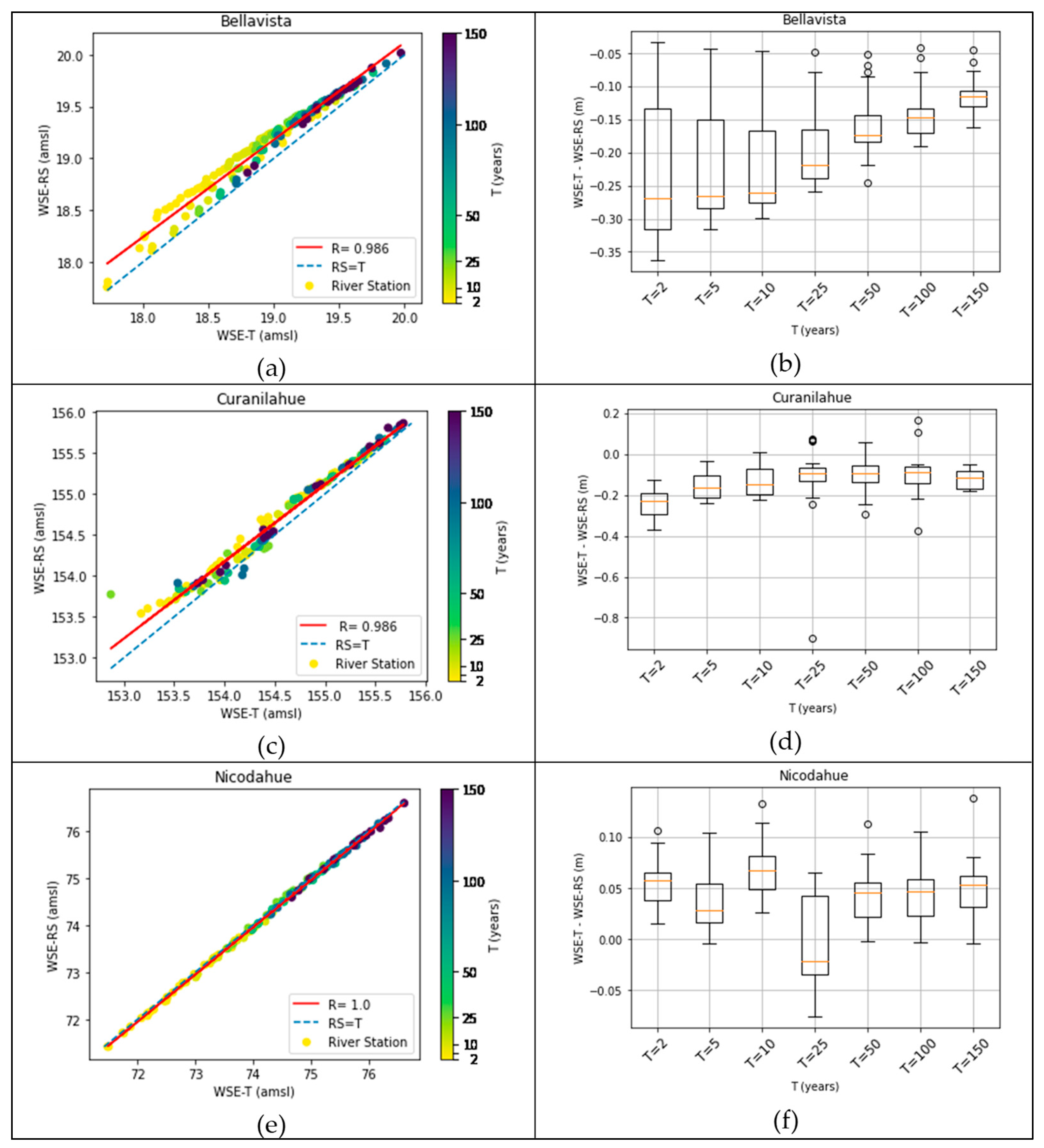
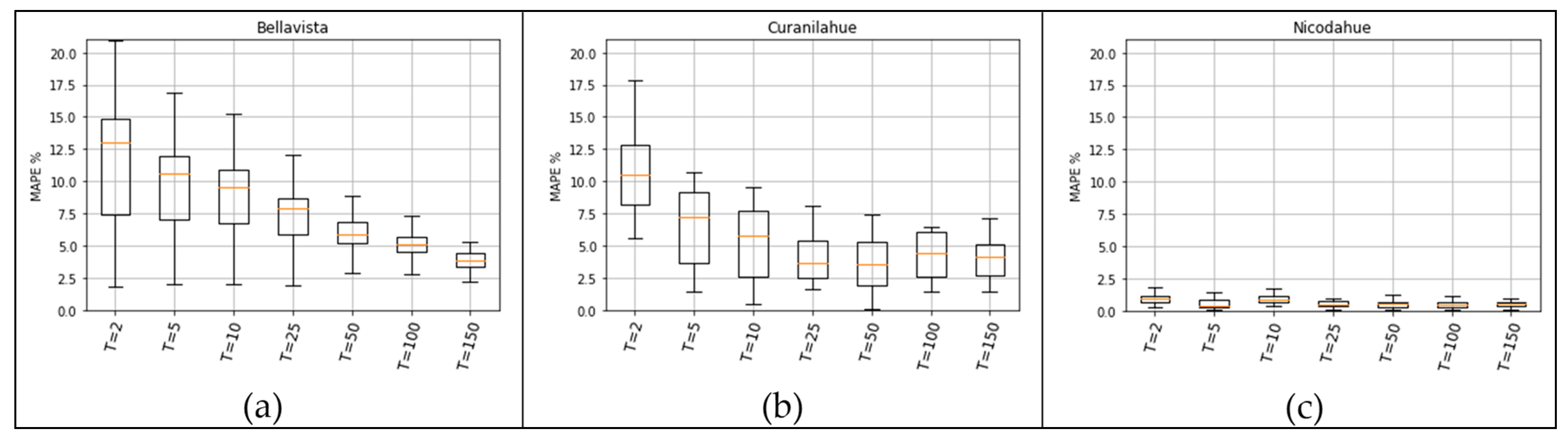
3.3. WSE
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bures, L.; Roub, R.; Sychova, P.; Gdulova, K.; Doubalova, J. Comparison of bathymetric data sources used in hydraulic modelling of floods. Flood Risk Manag. 2018, 12, e12495. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Xie, H. A Review on Applications of Remote Sensing and Geographic Information Systems (GIS) in Water Resources and Flood Risk Management. Water 2018, 10, 608. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, Y.; Kawahara, Y. UAV Photogrammetry for Monitoring Changes in River Topography and Vegetation. Procedia Eng. 2016, 154, 317–325. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.S.; Baek, D.; Seo, I.W.; Shin, J. Retrieving shallow stream bathymetry from UAV-assisted RGB imagery using a geospatial regression method. Geomorphology 2019, 341, 102–114. [Google Scholar] [CrossRef]
- McDonald, W. Drones in urban stormwater management: A review and future perspectives. Urban Water J. 2019, 16, 505–518. [Google Scholar] [CrossRef]
- Rosgen, D.L. The Natural Channel Design Method for River Restoration. In Proceedings of the World Environmental and Water Resource Congress, Omaha, Nebraska, 21–25 May 2006; pp. 1–12. [Google Scholar] [CrossRef] [Green Version]
- Degiorgis, M.; Gnecco, G.; Gorni, S.; Roth, G.; Sanguineti, M.; Taramasso, A.C. Classifiers for the detection of flood-prone areas using remote sensed elevation data. J. Hydrol. 2012, 470–471, 302–315. [Google Scholar] [CrossRef]
- Petrović, A.M.; Kovačević-Majkić, J.; Milošević, M.V. Application of run-off model as a contribution to the torrential flood risk management in Topčiderska Reka watershed, Serbia. Nat. Hazards 2016, 82, 1743–1753. [Google Scholar] [CrossRef]
- Salmoral, G.; Casado, M.R.; Muthusamy, M.; Butler, D.; Menon, P.P.; Leinster, P. Guidelines for the use of unmanned aerial systems in flood emergency response. Water 2020, 12, 521. [Google Scholar] [CrossRef] [Green Version]
- Castellarin, A.; Domeneghetti, A.; Brath, A. Identifying robust large-scale flood risk mitigation strategies: A quasi-2D hydraulic model as a tool for the Po river. Phys. Chem. Earth Parts A/B/C 2011, 36, 299–308. [Google Scholar] [CrossRef]
- Koc, K.; Isik, Z. A multi-agent-based model for sustainable governance of urban flood risk mitigation measures. Nat. Hazards 2020, 104, 1079–1110. [Google Scholar] [CrossRef]
- Pandjaitan, N.H.; Sutoyo, S.; Rau, M.I.; Febrita, J.; Dharmawan, I.; Akhmat, I. Comparison between DSM and DTM from photogrammetric UAV in Ngantru Hemlet, Sekaran Village, Bojonegoro East Java. Proc. SPIE 2019, 11372, 678–683. [Google Scholar] [CrossRef]
- Novak, P.; Guinot, V.; Jeffrey, A.; Reeve, D.E. Hydraulic Modelling–An Introduction: Principles, Methods and Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Pasquier, U.; He, Y.; Hooton, S.; Goulden, M.; Hiscock, K.M. An integrated 1D-2D hydraulic modelling approach to assess the sensitivity of a coastal region to compound flooding hazard under climate change. Nat. Hazards 2018, 98, 915–937. [Google Scholar] [CrossRef] [Green Version]
- Michaelis, T.; Brandimarte, L.; Mazzoleni, M.; Archfield, S.; Pande, S. Capturing flood-risk dynamics with a coupled agent-based and hydraulic modelling framework. Hydrol. Sci. J. 2020, 65, 1458–1473. [Google Scholar] [CrossRef]
- Quesada-Román, A.; Ballesteros-Cánovas, J.A.; Granados-Bolaños, S.; Birkel, C.; Stoffel, M. Dendrogeomorphic reconstruction of floods in a dynamic tropical river. Geomorphology 2020, 359, 107133. [Google Scholar] [CrossRef]
- Asaad, B.I.; Abed, B.S. Flow Characteristics Of Tigris River Within Baghdad City During Drought. J. Eng. 2020, 26, 77–92. [Google Scholar] [CrossRef] [Green Version]
- Sedighkia, M.; Abdoli, A. Optimizing environmental flow regime by integrating river and reservoir ecosystems. Water Resour. Manag. 2022, 36, 2079–2094. [Google Scholar] [CrossRef]
- Lamouroux, N.; Capra, H.; Pouilly, M. Predicting habitat suitability for lotic fish: Linking statistical hydraulic models with multivariate habitat use models. Regul. Rivers Res. Manag. 1998, 14, 1–11. [Google Scholar] [CrossRef]
- Sundt, H.; Alfredsen, K.; Museth, J.; Forseth, T. Combining green LiDAR bathymetry, aerial images and telemetry data to derive mesoscale habitat characteristics for European grayling and brown trout in a Norwegian river. Hydrobiologia 2022, 849, 509–525. [Google Scholar] [CrossRef]
- Papaioannou, G.; Loukas, A.; Vasiliades, L.; Aronica, G.T.; Gr, G. Flood inundation mapping sensitivity to riverine spatial resolution and modelling approach. Nat. Hazards 2016, 83, 117–132. [Google Scholar] [CrossRef]
- Flener, C.; Lotsari, E.; Alho, P.; Käyhkö, J. Comparison of empirical and theoretical remote sensing based bathymetry models in river environments. River Res. Appl. 2012, 28, 118–133. [Google Scholar] [CrossRef]
- Jawak, S.D.; Vadlamani, S.S.; Luis, A.J.; Jawak, S.D.; Vadlamani, S.S.; Luis, A.J. A Synoptic Review on Deriving Bathymetry Information Using Remote Sensing Technologies: Models, Methods and Comparisons. Adv. Remote Sens. 2015, 4, 147–162. [Google Scholar] [CrossRef] [Green Version]
- Ballesteros Cánovas, J.A.; Eguibar, M.; Bodoque, J.M.; Díez-Herrero, A.; Stoffel, M.; Gutiérrez-Pérez, I. Estimating flash flood discharge in an ungauged mountain catchment with 2D hydraulic models and dendrogeomorphic palaeostage indicators. Hydrol. Process. 2011, 25, 970–979. [Google Scholar] [CrossRef] [Green Version]
- Bodoque, J.M.; Díez-Herrero, A.; Eguibar, M.A.; Benito, G.; Ruiz-Villanueva, V.; Ballesteros-Cánovas, J.A. Challenges in paleoflood hydrology applied to risk analysis in mountainous watersheds—A review. J. Hydrol. 2015, 529, 449–467. [Google Scholar] [CrossRef] [Green Version]
- Koutalakis, P.; Tzoraki, O.; Zaimes, G. drones UAVs for Hydrologic Scopes: Application of a Low-Cost UAV to Estimate Surface Water Velocity by Using Three Different Image-Based Methods. Drones 2019, 3, 14. [Google Scholar] [CrossRef] [Green Version]
- Hill, D.J.; Pypker, T.G.; Church, J. Applications of Unpiloted Aerial Vehicles (UAVs) in Forest Hydrology BT—Forest-Water Interactions; Levia, D.F., Carlyle-Moses, D.E., Iida, S., Michalzik, B., Nanko, K., Tischer, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 55–85. [Google Scholar]
- Mazzoleni, M.; Paron, P.; Reali, A.; Juizo, D.; Manane, J.; Brandimarte, L. Testing UAV-derived topography for hydraulic modelling in a tropical environmentderived topography LiDAR RTK-GPS SRTM Hydraulic model Tropical environment. Nat. Hazards 2020, 103, 139–163. [Google Scholar] [CrossRef]
- Granados-Bolaños, S.; Quesada-Román, A.; Alvarado, G.E. Low-cost UAV applications in dynamic tropical volcanic landforms. J. Volcanol. Geotherm. Res. 2021, 410, 107143. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, C.; Yang, S.; Liu, C.; Xiang, H.; Sun, Y.; Yang, Z.; Zhang, Y.; Yu, X.; Shao, N.; et al. Calculating e-flow using UAV and ground monitoring. J. Hydrol. 2017, 552, 351–365. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landf. 2016, 42, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Santise, M.; Fornari, M.; Forlani, G.; Roncella, R. Evaluation of dem generation accuracy from uas imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 45, 529–536. [Google Scholar] [CrossRef] [Green Version]
- Bandini, F.; Sunding, T.P.; Linde, J.; Smith, O.; Jensen, I.K.; Köppl, C.J.; Butts, M.; Bauer-Gottwein, P. Unmanned Aerial System (UAS) observations of water surface elevation in a small stream: Comparison of radar altimetry, LIDAR and photogrammetry techniques. Remote Sens. Environ. 2020, 237, 111487. [Google Scholar] [CrossRef]
- King, T.V.; Neilson, B.T.; Rasmussen, M.T. Estimating Discharge in Low-Order Rivers With High-Resolution Aerial Imagery. Water Resour. Res. 2018, 54, 863–878. [Google Scholar] [CrossRef] [Green Version]
- Hicks, D.M. Remotely Sensed Topographic Change in Gravel Riverbeds with Flowing Channels. In Gravel—Bed Rivers; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012; pp. 303–314. [Google Scholar]
- Williams, R.D.; Brasington, J.; Vericat, D.; Hicks, D.M. Hyperscale terrain modelling of braided rivers: Fusing mobile terrestrial laser scanning and optical bathymetric mapping. Earth Surf. Process. Landf. 2014, 39, 167–183. [Google Scholar] [CrossRef]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Seamless mapping of river channels at high resolution using mobile LiDAR and UAV-photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef] [Green Version]
- Brasington, J.; Rumsby, B.T.; McVey, R.A. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Process. Landf. 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Lane, S.N.; Richards, K.S.; Chandler, J.H. Developments in monitoring and modelling small-scale river bed topography. Earth Surf. Process. Landf. 1994, 19, 349–368. [Google Scholar] [CrossRef]
- Milne, J.A.; Sear, D.A. Modelling river channel topography using GIS. Int. J. Geogr. Inf. Sci. 1997, 11, 499–519. [Google Scholar] [CrossRef]
- Koljonen, S.; Huusko, A.; Mäki-Petäys, A.; Louhi, P.; Muotka, T. Assessing Habitat Suitability for Juvenile Atlantic Salmon in Relation to In-Stream Restoration and Discharge Variability. Restor. Ecol. 2013, 21, 344–352. [Google Scholar] [CrossRef]
- Kinzel, P.J.; Legleiter, C.J.; Nelson, J.M. Mapping River Bathymetry With a Small Footprint Green LiDAR: Applications and Challenges1. JAWRA J. Am. Water Resour. Assoc. 2013, 49, 183–204. [Google Scholar] [CrossRef]
- Guenther, G.C. Airborne lidar bathymetry. Digit. Elev. Model Technol. Appl. DEM Users Man. 2007, 2, 253–320. [Google Scholar]
- Guerrero, M.; Lamberti, A. Flow field and morphology mapping using ADCP and multibeam techniques: Survey in the Po River. J. Hydraul. Eng. 2011, 137, 1576–1587. [Google Scholar] [CrossRef]
- Kasvi, E.; Laamanen, L.; Lotsari, E.; Alho, P. Flow Patterns and Morphological Changes in a Sandy Meander Bend during a Flood—Spatially and Temporally Intensive ADCP Measurement Approach. Water 2017, 9, 106. [Google Scholar] [CrossRef] [Green Version]
- Westaway, R.M.; Lane, S.N.; Hicks, D.M. Remote sensing of clear-water, shallow, gravel-bed rivers using digital photogrammetry. Photogramm. Eng. Remote Sens. 2001, 67, 1271–1282. [Google Scholar]
- Kasvi, E.; Salmela, J.; Lotsari, E.; Kumpula, T.; Lane, S.N. Comparison of remote sensing based approaches for mapping bathymetry of shallow, clear water rivers. Geomorphology 2019, 333, 180–197. [Google Scholar] [CrossRef]
- Billard, B.; Abbot, R.H.; Penny, M.F. Airborne estimation of sea turbidity parameters from the WRELADS laser airborne depth sounder. Appl. Opt. 1986, 25, 2080–2088. [Google Scholar] [CrossRef] [PubMed]
- Eren, F.; Pe’eri, S.; Rzhanov, Y.; Ward, L. Bottom characterization by using airborne lidar bathymetry (ALB) waveform features obtained from bottom return residual analysis. Remote Sens. Environ. 2018, 206, 260–274. [Google Scholar] [CrossRef]
- Hilldale, R.C.; Raff, D. Assessing the ability of airborne LiDAR to map river bathymetry. Earth Surf. Process. Landf. 2008, 33, 773–783. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Cheng, Y.-T.; Zhou, T.; Ravi, R.; Hasheminasab, S.M.; Flatt, J.E.; Troy, C.; Habib, A. Evaluation of UAV LiDAR for Mapping Coastal Environments. Remote Sens. 2019, 11, 2893. [Google Scholar] [CrossRef] [Green Version]
- Hilldale, R.C. Using Bathymetric LiDAR and a 2-D Hydraulic Model to Identify Aquatic River Habitat. In Proceedings of the World Environmental and Water Resources Congress 2007: Restoring Our Natural Habitat, Tampa, FL, USA, 15–19 May 2007; pp. 1–18. [Google Scholar]
- Mihu-Pintilie, A.; Cîmpianu, C.I.; Stoleriu, C.C.; Pérez, M.N.; Paveluc, L.E. Using High-Density LiDAR Data and 2D Streamflow Hydraulic Modeling to Improve Urban Flood Hazard Maps: A HEC-RAS Multi-Scenario Approach. Water 2019, 11, 1832. [Google Scholar] [CrossRef] [Green Version]
- Costa, B.M.; Battista, T.A.; Pittman, S.J. Comparative evaluation of airborne LiDAR and ship-based multibeam SoNAR bathymetry and intensity for mapping coral reef ecosystems. Remote Sens. Environ. 2009, 113, 1082–1100. [Google Scholar] [CrossRef]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping Topobathymetry in a Shallow Tidal Environment Using Low-Cost Technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Lei, T.; Wang, J.; Li, X.; Wang, W.; Shao, C.; Liu, B. Flood Disaster Monitoring and Emergency Assessment Based on Multi-Source Remote Sensing Observations. Water 2022, 14, 2207. [Google Scholar] [CrossRef]
- Jiménez-Jiménez, S.; Ojeda, W.; Marcial, M.D.; Enciso, J. Digital Terrain Models Generated with Low-Cost UAV Photogrammetry: Methodology and Accuracy. ISPRS Int. J. Geo-Inf. 2021, 10, 285. [Google Scholar] [CrossRef]
- DGA. Guías Metodológicas Para Presentación y Revisión Técnica de Proyectos de Modificación de Cauces Naturales Y Artificiales; DGA: Santiago, Chile, 2016. [Google Scholar]
- Chow, V.T. Open-Channel Hydraulics, Classical Textbook Reissue; McGraw-Hill: New York, NY, USA, 1988. [Google Scholar]
- DGA. Precipitaciones Máximas Diarias (Mapoteca Digital). 2018. Available online: https://dga.mop.gob.cl (accessed on 15 January 2023).
- Rosgen, D.L. A classification of natural rivers. Catena 1994, 22, 169–199. [Google Scholar] [CrossRef] [Green Version]
- Rajabi, M.; Roostaei, S.; Barzkar, M. Morphological classification stability of Zab river channel on Rosgen method. Geogr. Plan. 2021, 25, 141–155. [Google Scholar] [CrossRef]
- Schwartz, J.S. Use of Ecohydraulic-Based Mesohabitat Classification and Fish Species Traits for Stream Restoration Design. Water 2016, 8, 520. [Google Scholar] [CrossRef] [Green Version]
- Rosgen, D.L. Rosgen, D.L. Rosgen geomorphic channel design. In Part 654 Stream Restoration Design National Engineering Handbook; United States Department of Agriculture: Washington, DC, USA, 2007. [Google Scholar]
- Meehan, M.A.; O’Brien, P.L. Using the Rosgen Stream Classification System to Aid in Riparian Complex Ecological Site Descriptions Development. Rangel. Ecol. Manag. 2019, 72, 729–735. [Google Scholar] [CrossRef]
- Wolman, M.G.; Leopold, L.B. River Flood Plains: Some Observations on Their Formation; US Government Printing Office: Washington, DC, USA, 1957. [Google Scholar]
- Williams, G.P. Bank-full discharge of rivers. Water Resour. Res. 1978, 14, 1141–1154. [Google Scholar] [CrossRef]
- Friend, P.F.; Sinha, R. Braiding and meandering parameters. Geol. Soc. Lond. Spec. Publ. 1993, 75, 105–111. [Google Scholar] [CrossRef]
- Becker, C.; Häni, N.; Rosinskaya, E.; d’Angelo, E.; Strecha, C. Classification of aerial photogrammetric 3D point clouds. arXiv 2017, arXiv:1705.08374. [Google Scholar] [CrossRef] [Green Version]
- Walter, J.; Edwards, J.; McDonald, G.; Kuchel, H. Photogrammetry for the estimation of wheat biomass and harvest index. Field Crop. Res. 2018, 216, 165–174. [Google Scholar] [CrossRef]
- Deems, J.S.; Painter, T.H.; Finnegan, D.C. Lidar measurement of snow depth: A review. J. Glaciol. 2013, 59, 467–479. [Google Scholar] [CrossRef] [Green Version]
- Schaake, J.C., Jr.; Geyer, J.C.; Knapp, J.W. Experimental examination of the rational method. J. Hydraul. Div. 1967, 93, 353–370. [Google Scholar] [CrossRef]
- Mulvaney, T.J. On the use of self-registering rain and flood gauges in making observations of the relations of rainfall and flood discharges in a given catchment. Proc. Inst. Civ. Eng. Irel. 1851, 4, 19–31. [Google Scholar]
- Campos, J.N.B.; Studart, T.M.; Souza Filho, D.F.; Porto, V.C. On the Rainfall Intensity–Duration–Frequency Curves, Partial-Area Effect and the Rational Method: Theory and the Engineering Practice. Water 2020, 12, 2730. [Google Scholar] [CrossRef]
- Ayala, C.; Vidal Jara, F.; Ayala Riquelme, L. Manual de Cálculo de Crecidas y Caudales Mínimos en Cuencas sin Información Fluviométrica. Ministerio de Obras Públicas, Dirección General de Aguas: Santiago, Chile, 1995. Agosto. Available online: https://snia.mop.gob.cl/sad/FLU398.pdf (accessed on 15 January 2023).
- MOP. Manual de Carreteras Volumen N° 2. Procedimientos de Estudios Viales. 2022. Available online: https://mc.mop.gob.cl (accessed on 15 January 2023).
- Varas, E.; Sánchez, S. Curvas Generalizadas de Intensidad-Duración-Frecuencia de Lluvias. Hidrol. Dren. Vial. Chile 1988. Available online: http://www.dga.cl/estudiospublicaciones/mapoteca/Balance%20Hdrico/isoyetas.zip (accessed on 15 January 2023).
- Charley, W.J. The Hydrologic Modeling System (HEC-HMS): Design and Development Issues; US Army Corps of Engineers, Hydrologic Engineering Center: Davis, CA, USA, 1995. [Google Scholar]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Lamichhane, N.; Sharma, S. Development of Flood Warning System and Flood Inundation Mapping Using Field Survey and LiDAR Data for the Grand River near the City of Painesville, Ohio. Hydrology 2017, 4, 24. [Google Scholar] [CrossRef] [Green Version]
- Namara, W.G.; Damisse, T.A.; Tufa, F.G. Application of HEC-RAS and HEC-GeoRAS model for Flood Inundation Mapping, the case of Awash Bello Flood Plain, Upper Awash River Basin, Oromiya Regional State, Ethiopia. Model. Earth Syst. Environ. 2021, 8, 1449–1460. [Google Scholar] [CrossRef]
- Quesada-Román, A.; Ballesteros-Cánovas, J.A.; Granados-Bolaños, S.; Birkel, C.; Stoffel, M. Improving regional flood risk assessment using flood frequency and dendrogeomorphic analyses in mountain catchments impacted by tropical cyclones. Geomorphology 2022, 396, 108000. [Google Scholar] [CrossRef]
- Azamathulla, H.M.; Jarrett, R.D. Use of Gene-Expression Programming to Estimate Manning’s Roughness Coefficient for High Gradient Streams. Water Resour. Manag. 2013, 27, 715–729. [Google Scholar] [CrossRef]
- Haile, A.T.; Asfaw, W.; Rientjes, T.; Worako, A.W. Deterioration of streamflow monitoring in Omo-Gibe basin in Ethiopia. Hydrol. Sci. J. 2022, 67, 1040–1053. [Google Scholar] [CrossRef]
- Rosgen, D.L. Applied River Morphology; Wildland Hydrology: Pagosa Springs, CO, USA, 1996. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| River | A (km2) | Tc (hr) | CD | Q(m3/s) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| T = 2 | T = 5 | T = 10 | T = 25 | T = 50 | T = 100 | T = 150 | |||||
| Bellavista | 81.9 | 4.05 | 0.38 | 95 | 46.5 | 64.3 | 73.8 | 85.3 | 95.8 | 103.9 | 113.2 |
| Curanilahue | 70.9 | 2.06 | 0.28 | 100 | 64.2 | 86.3 | 97.4 | 109.4 | 116.5 | 131.9 | 140.4 |
| Nicodahue | 727.6 | 5.11 | 0.43 | 120 | 468.6 | 648.2 | 744.1 | 860.2 | 965.7 | 1048 | 1141.3 |
| River | Bellavista | Curanilahue | Nicodahue |
|---|---|---|---|
| Sinuosity | 1.522 | 1.172 | 1.056 |
| Slope | 0.0039 | 0.0034 | 0.0015 |
| Channel material | Cobble | Cobble | Gravel |
| Length (m) | 391 | 455 | 755 |
| Date measured | 16-02-2021 | 25-03-2021 | 18-03-2021 |
| Rosgen Classification | F3; C3 | B3c; C3 | B4c |
| River | O.F. | T = 2 | T = 5 | T = 10 | T = 25 | T = 50 | T = 100 | T = 150 |
|---|---|---|---|---|---|---|---|---|
| Bellavista | RMSE (m) | 0.251 | 0.233 | 0.228 | 0.201 | 0.167 | 0.148 | 0.118 |
| MAE (m) | 0.230 | 0.218 | 0.214 | 0.191 | 0.159 | 0.142 | 0.115 | |
| Curanilahue | RMSE (m) | 0.251 | 0.171 | 0.149 | 0.250 | 0.137 | 0.153 | 0.126 |
| MAE (m) | 0.240 | 0.156 | 0.132 | 0.158 | 0.112 | 0.131 | 0.118 | |
| Nicodahue | RMSE (m) | 0.060 | 0.047 | 0.076 | 0.045 | 0.054 | 0.054 | 0.061 |
| MAE (m) | 0.055 | 0.038 | 0.070 | 0.041 | 0.045 | 0.047 | 0.052 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Clasing, R.; Muñoz, E.; Arumí, J.L.; Caamaño, D.; Alcayaga, H.; Medina, Y. Remote Sensing with UAVs for Modeling Floods: An Exploratory Approach Based on Three Chilean Rivers. Water 2023, 15, 1502. https://doi.org/10.3390/w15081502
Clasing R, Muñoz E, Arumí JL, Caamaño D, Alcayaga H, Medina Y. Remote Sensing with UAVs for Modeling Floods: An Exploratory Approach Based on Three Chilean Rivers. Water. 2023; 15(8):1502. https://doi.org/10.3390/w15081502
Chicago/Turabian StyleClasing, Robert, Enrique Muñoz, José Luis Arumí, Diego Caamaño, Hernán Alcayaga, and Yelena Medina. 2023. "Remote Sensing with UAVs for Modeling Floods: An Exploratory Approach Based on Three Chilean Rivers" Water 15, no. 8: 1502. https://doi.org/10.3390/w15081502
APA StyleClasing, R., Muñoz, E., Arumí, J. L., Caamaño, D., Alcayaga, H., & Medina, Y. (2023). Remote Sensing with UAVs for Modeling Floods: An Exploratory Approach Based on Three Chilean Rivers. Water, 15(8), 1502. https://doi.org/10.3390/w15081502