
Numerical Modelling and Prediction of Oil Slick Dispersion and Horizontal Movement at Bornholm Basin in Baltic Sea


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Factors Affecting Oil Slick Movement and Spreading
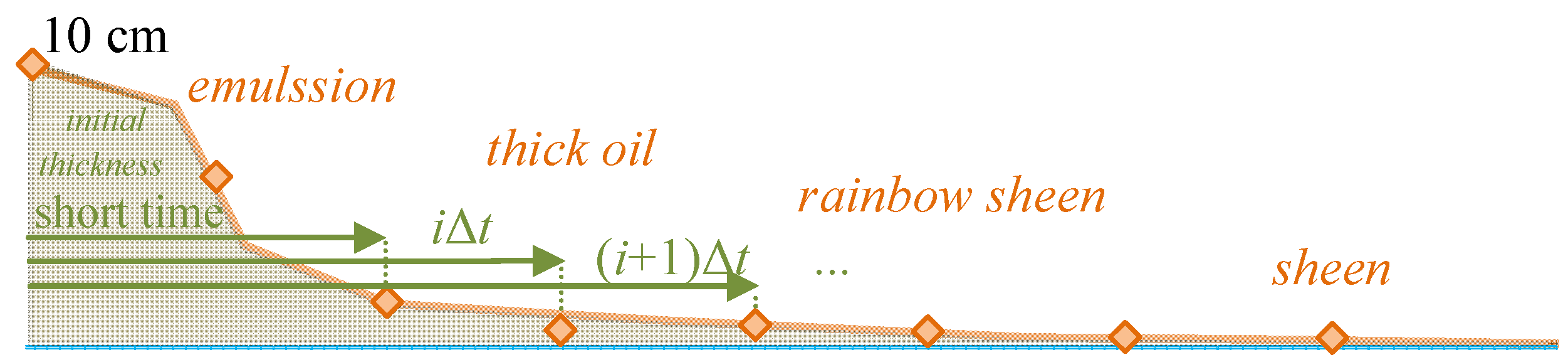
2.1. Oil Slick Thickness at the Sea Surface
2.2. Oil Slick Affected by Hydrological and Meteorological Conditions
3. Methodology
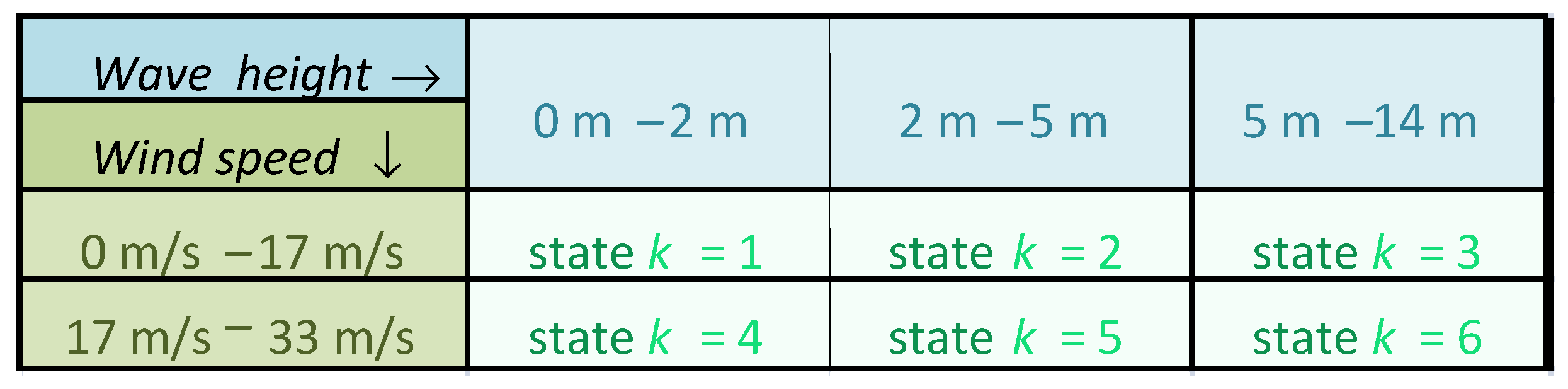
3.1. Process of Changing Hydro-Meteorological Conditions
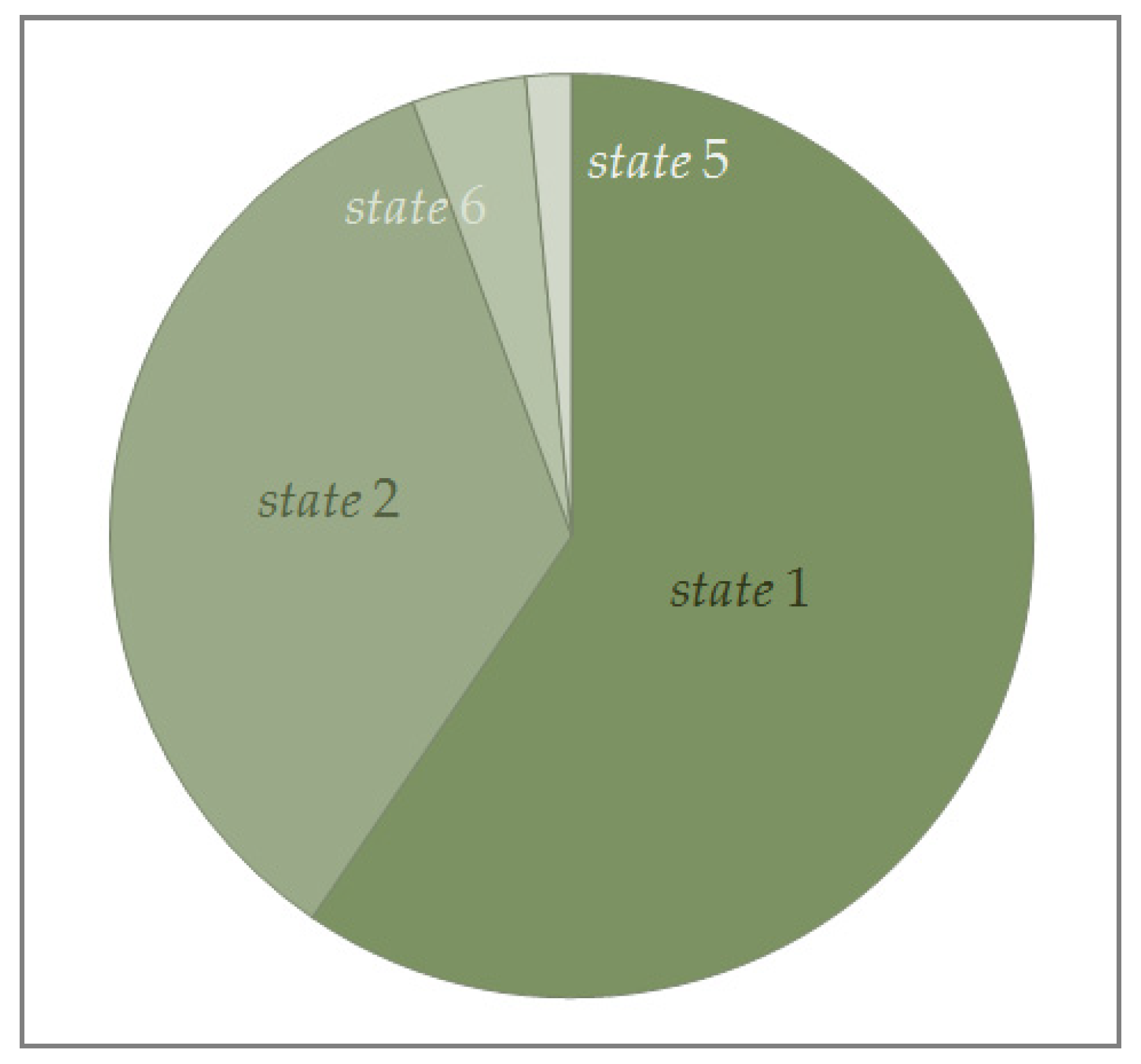
- The vector of the starting probabilitiesof the process staying in the particular states at the moment t = 0;[p(0)] = [p1(0), p2(0), …, pm(0)],
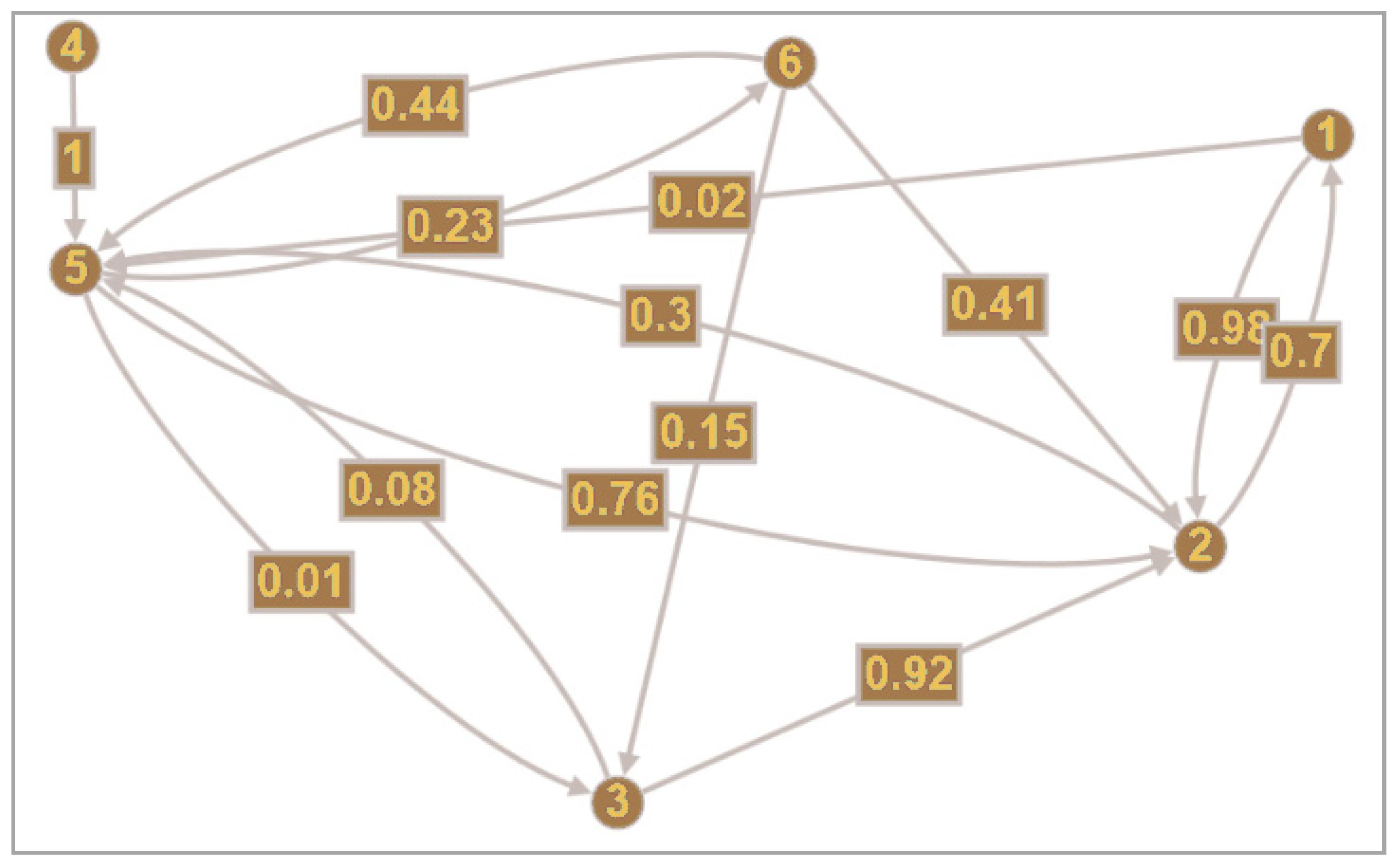
- The matrix of the probabilities pij, i, j = 1, 2, …, m, of the process’ transitions between the states i and j, i ≠ jwhere zeros on the diagonal result from a practical interpretation (no transition from state i = 1 to j = 1; the process remains in the same state; hence, the number of transitions is zero);
- The matrix of the conditional distribution functionsof the process’ conditional sojourn times θij in the specific statesWij(t) = P(θij ≤ t), t ∈ 〈0, ∞〉,
3.2. Probabilistic Modelling of Oil Slick Trend Considering Thickness of Oil Layer
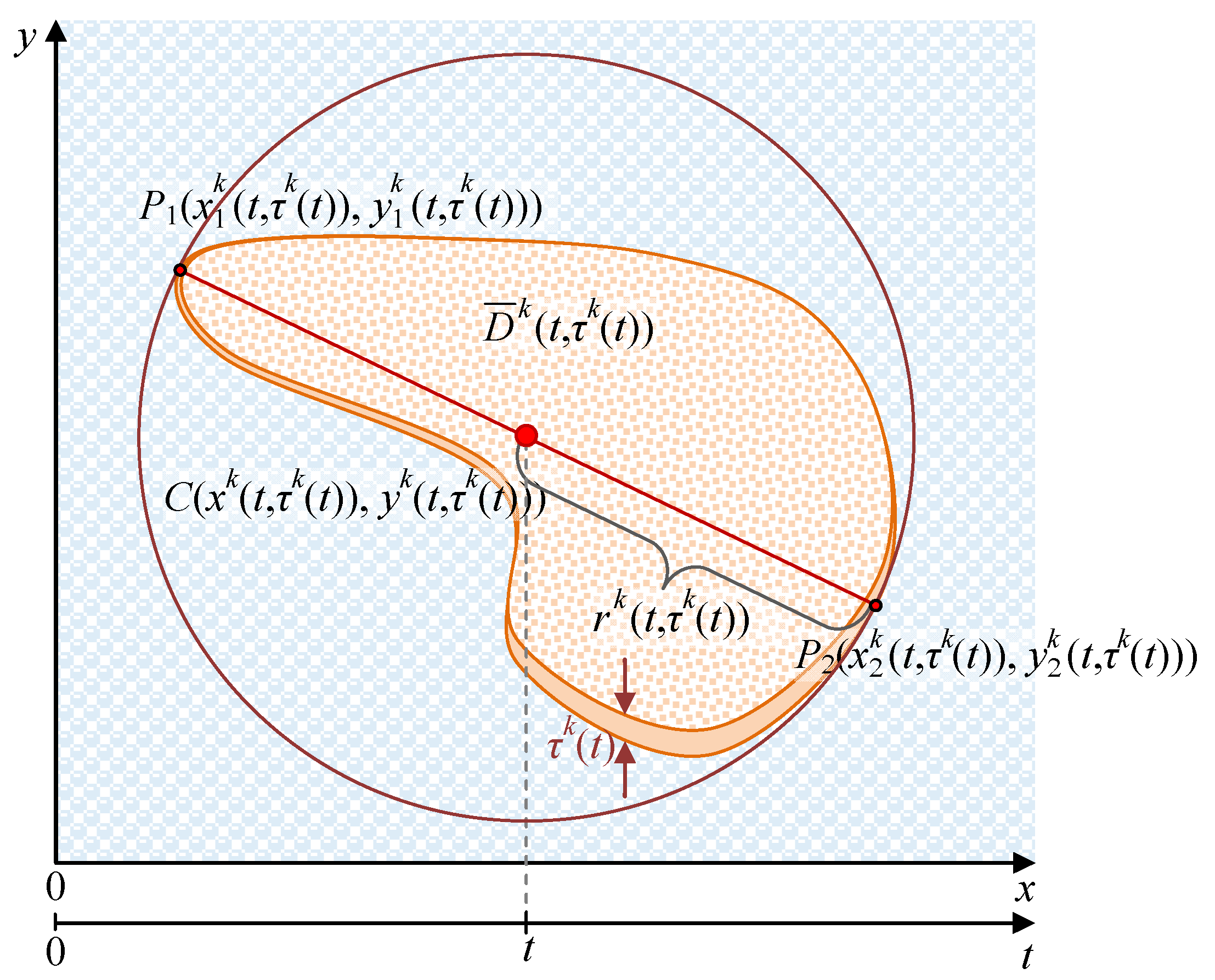
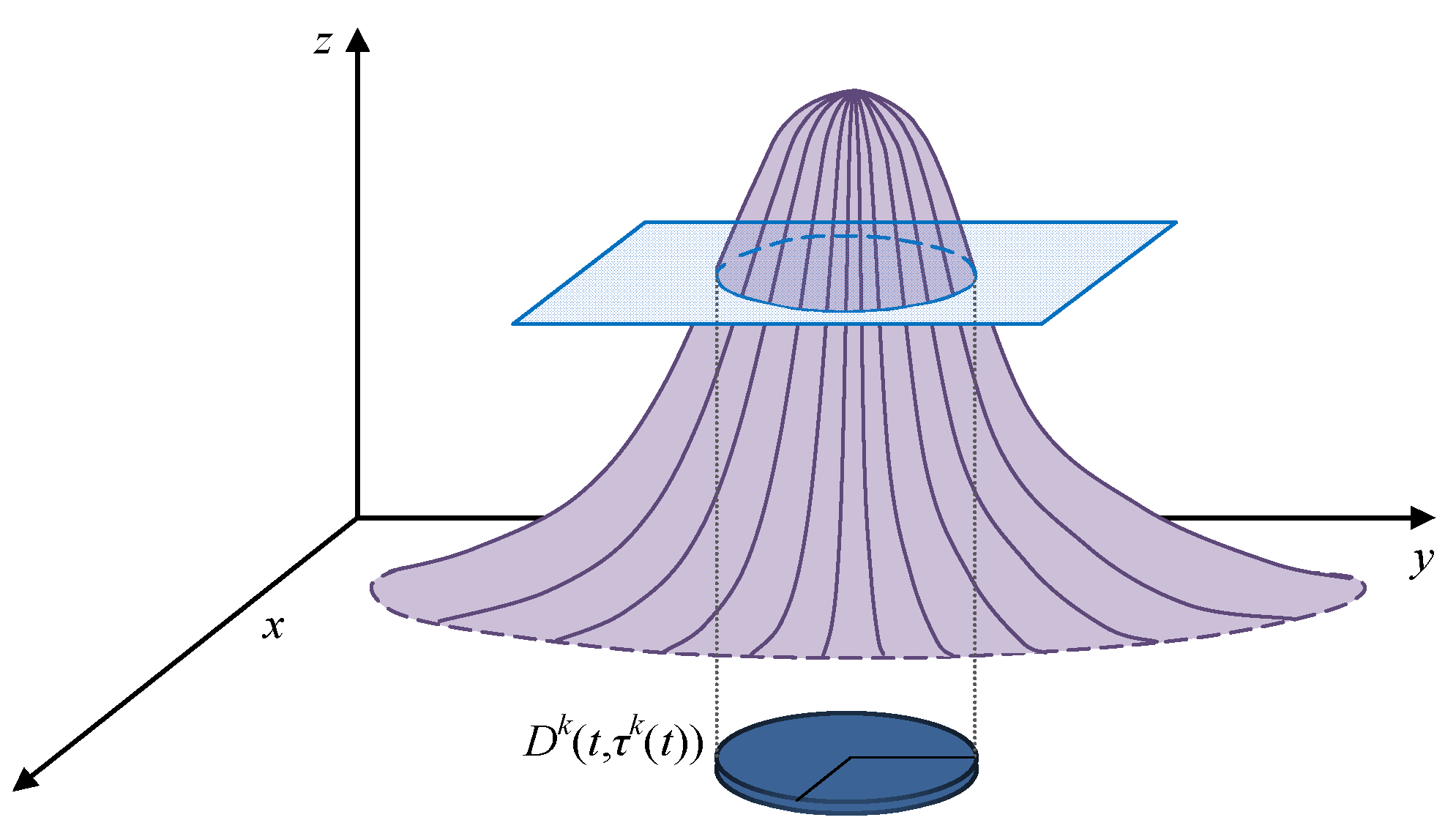
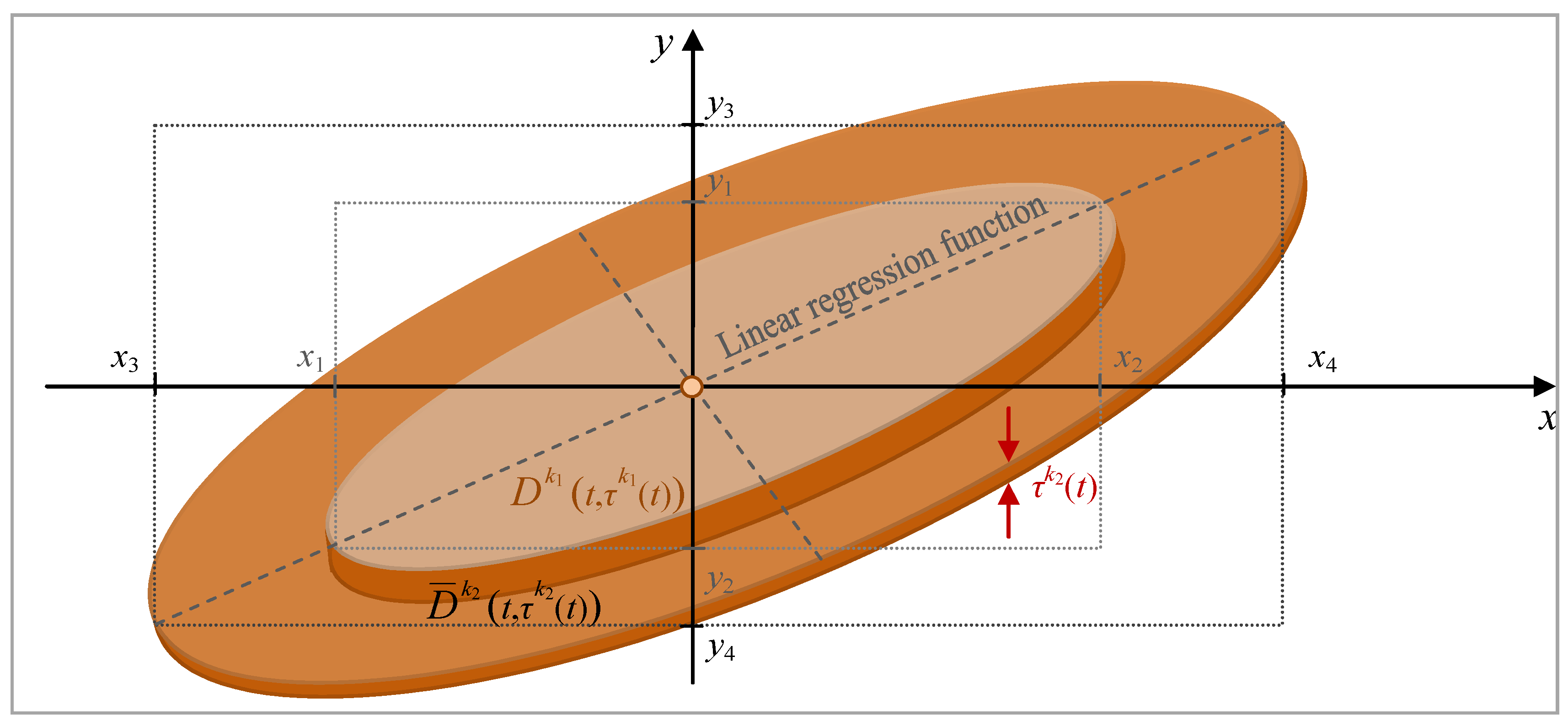
3.3. Modelling Oil Slick Horizontal Movement and Dispersion
- Varying hydro-meteorological factors that change at random times;
- Any quantity of hydro-meteorological factors considered in the model;
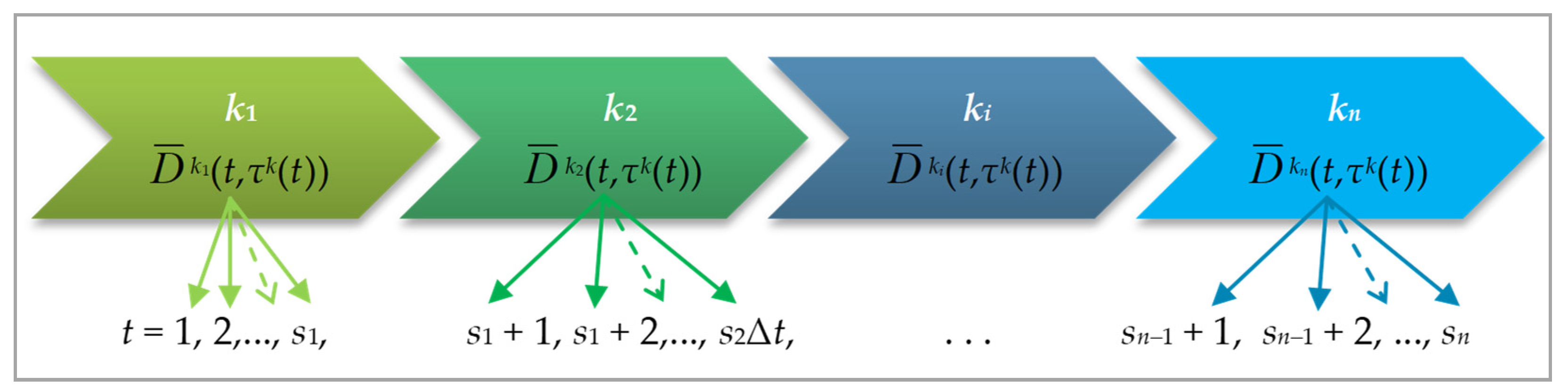
- The statesof the hydro-meteorological process A(t), taken in successive order;k1, k2, …, kn+1, where ki ∈ {1, 2, …, m}, i = 1, 2, …, n + 1,
- A fixed step of time ∆t;
- A changeable oil layer thickness τk(t) in each hydro-meteorological state;
- A number of steps si, i = 1, 2, …, n + 1;
- The time seriesin the process A(t)’s states.t = 1Δt, 2Δt, …, s1Δt, (s1 + 1)Δt, (s1 + 2)Δt, …, s2Δt, …,
(si−1 + 1)Δt, (si−1 + 2)Δt, …, siΔt, …, sn−1Δt, (sn−1 + 1)Δt, (sn−1 + 2)Δt, …, snΔt,
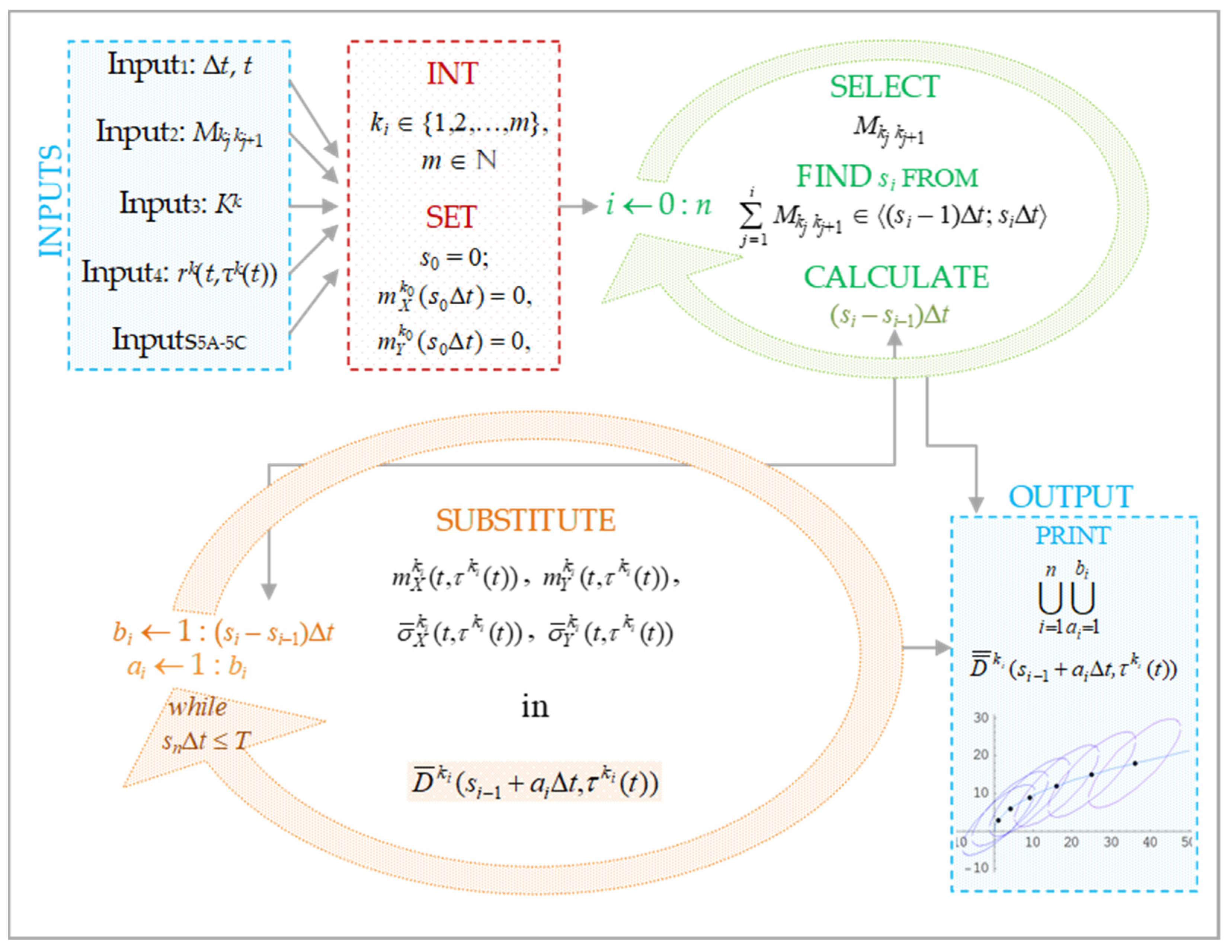
3.4. Procedure to Forecast the Horizontal Movement and Dispersion of an Oil Slick
- Input1: step of time ∆t; time t, t ∈ (0,T〉;
- Input2: mean values Mkjkj+1, defined by (7) and (8) in different hydro-meteorological states;
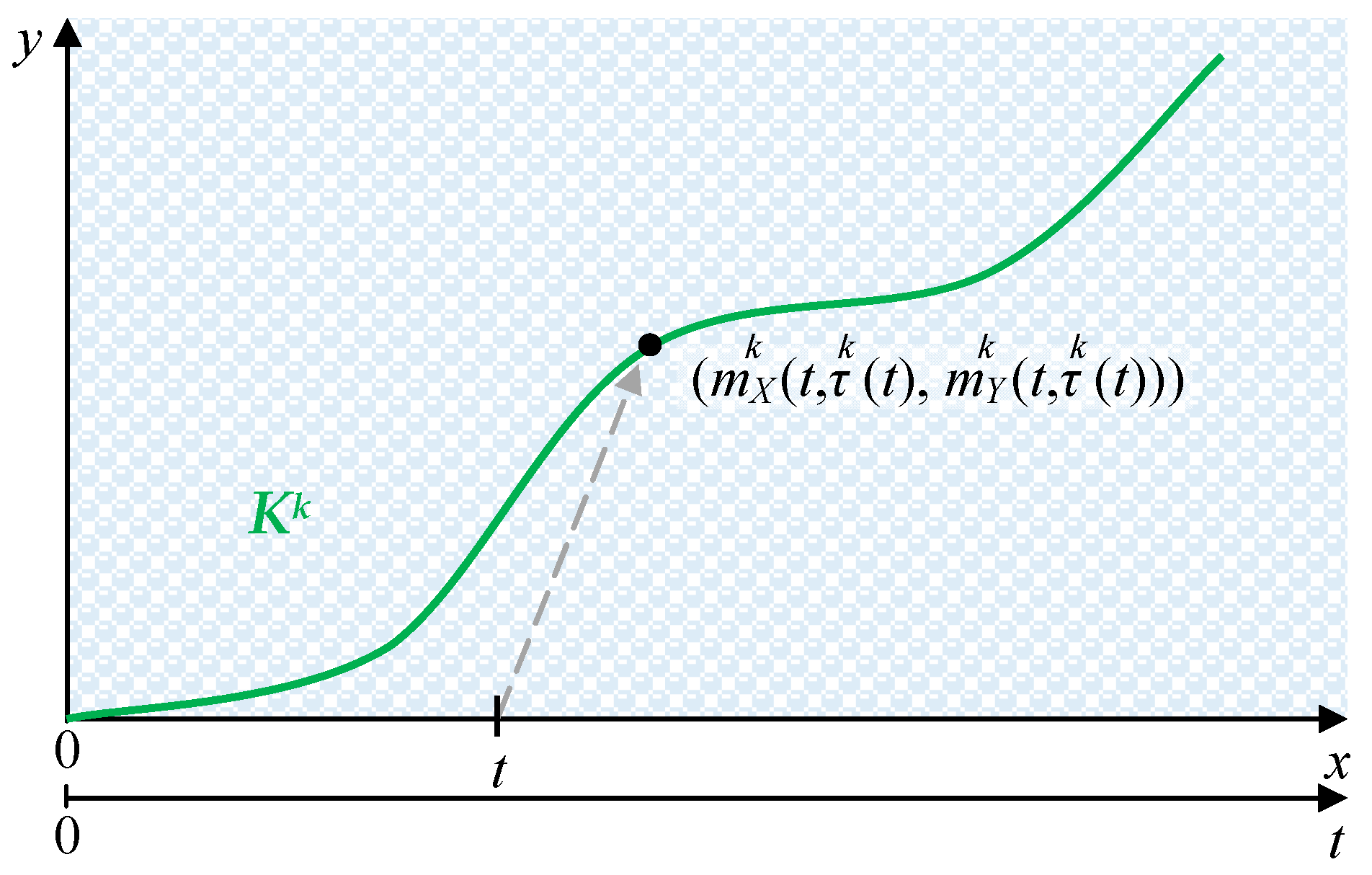
- Input3: oil spill central point drift trend Kk, given by (23);
- Input4: radius rk(t,τk(t)) dependent over time, given by (13);
- Input5A: expected values (t,τk(t)), (t,τk(t)), given by (17);
- Input5B: standard deviations (t,τk(t)), (t,τk(t)), given by (18);
- Input5C: correlation coefficient (t,τk(t)), given by (19).
4. Application and Results
4.1. The Bornholm Basin in the Baltic Sea
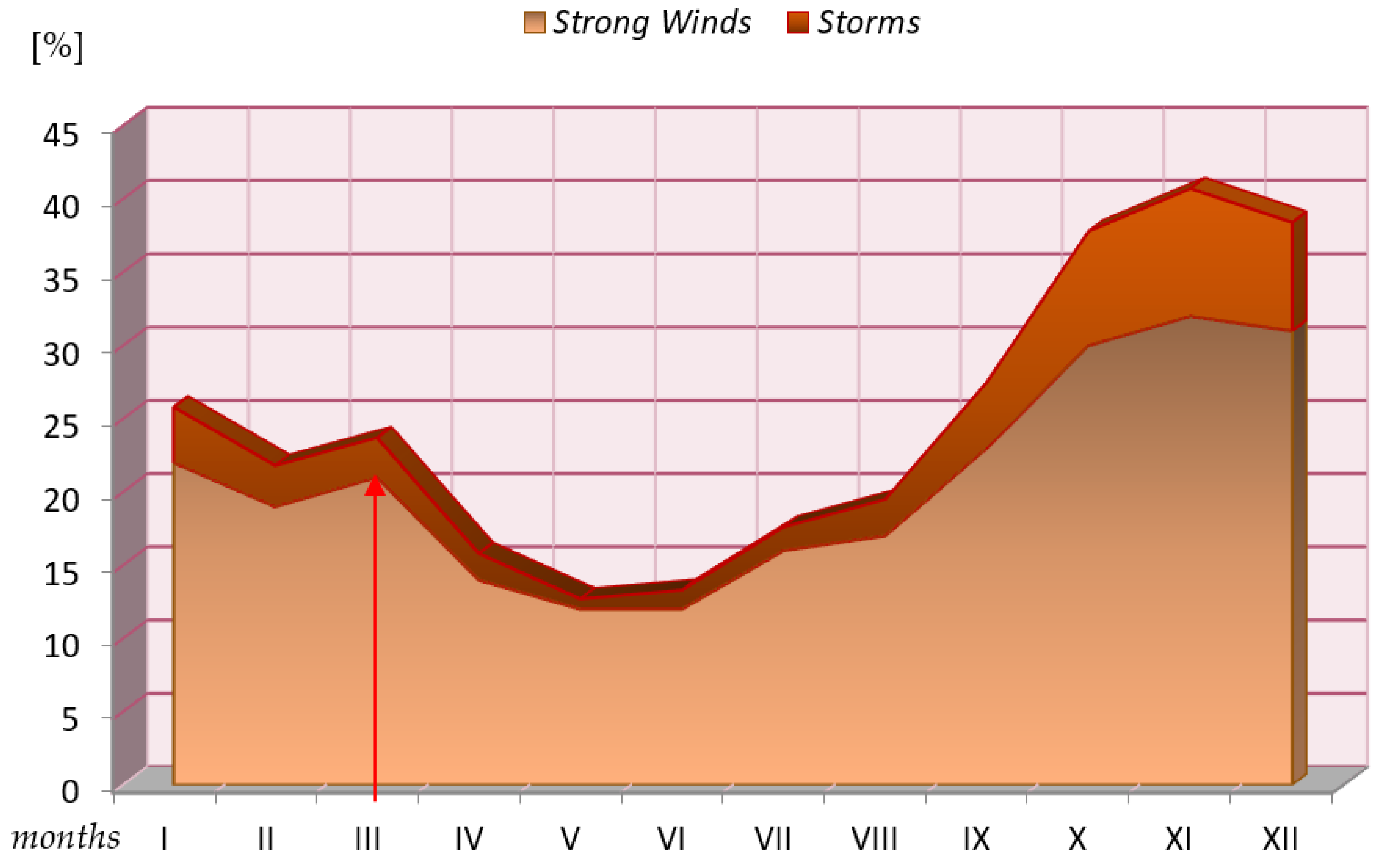
4.2. Winds and Waves at the Bornholm Basin in the Baltic Sea
4.3. Hydro-Meteorological Input Data for the Model
4.4. Other Input Data for the Model
- The time step assumed to be ∆t = 1 h;
- The experiment time t, t ∈ 〈0,48〉, is represented by the time series t ∈ (si−1 + 1, si〉, i = 1, 2, …, n;
- The mean values Mkiki+1, ki ∈ {1, 2, …, 6}, are taken from (48) in different hydro-meteorological states;
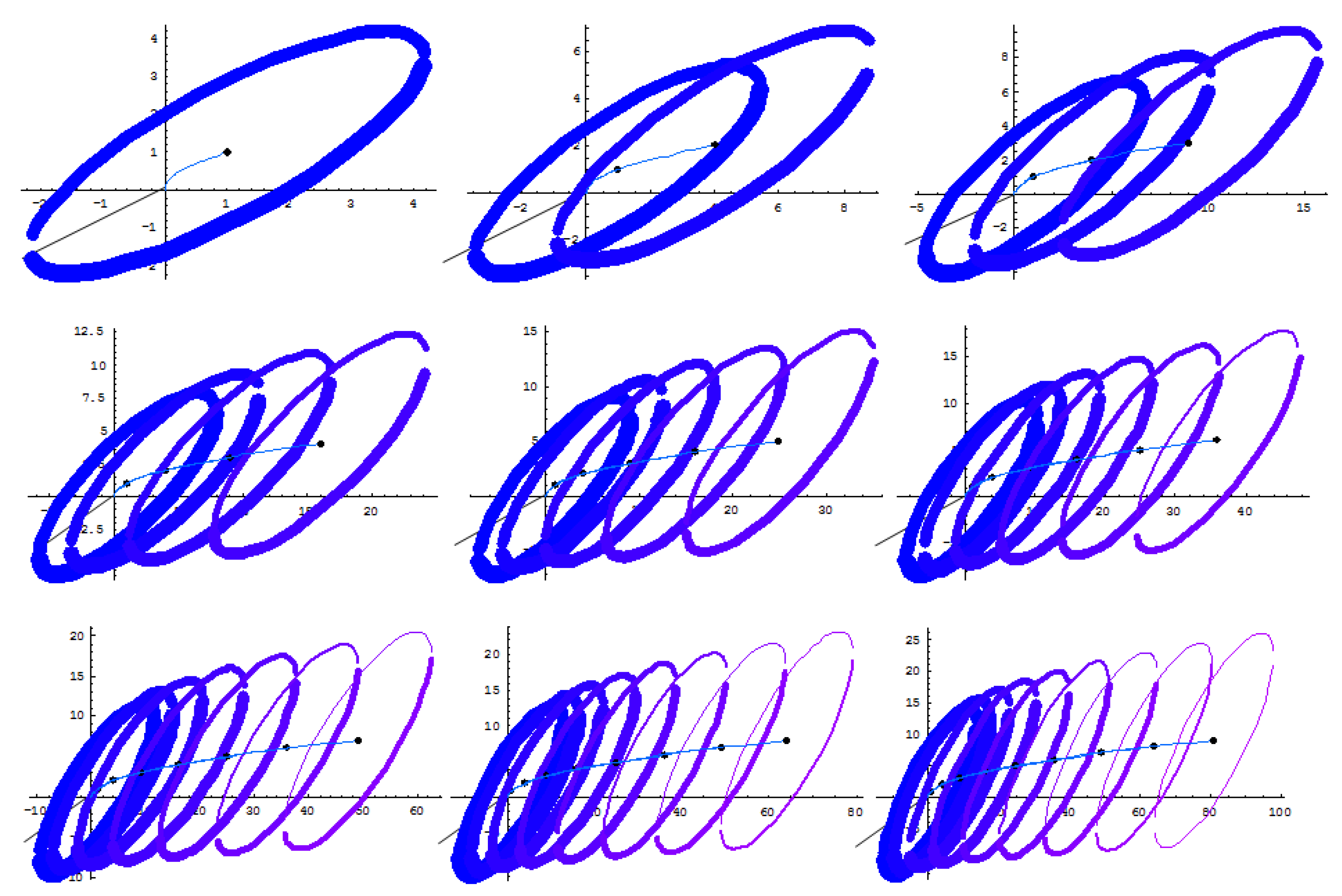
- The points (17) existing in Figure 4, forming a central point Kki given by (23), are represented by the equations , and τ ∈ (0, 1〉;
- Standard deviations (18) are to be assumed time-dependent, = = 0.2·t + 0.1;
- The correlation coefficient (19) is = 0.8;
- Radii (13) are time-dependent, 0.5·t + 0.5.
4.5. The Results
5. Discussion and Comments
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bogalecka, M. Consequences of maritime critical infrastructure accidents with chemical releases. Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 771–779. [Google Scholar] [CrossRef]
- Cordes, E.E.; Jones, D.O.B.; Schlacher, T.A.; Amon, D.J.; Bernardino, A.F.; Brooke, S.; Carney, R.; DeLeo, D.M.; Dunlop, K.M.; Escobar-Briones, E.G.; et al. Environmental impacts of the deep-water oil and gas industry: A review to guide management strategies. Front. Environ. Sci. 2016, 4, 58. [Google Scholar] [CrossRef]
- Eckroth, J.R.; Madsen, M.M.; Hoell, E. Dynamic modeling of oil spill cleanup operations. In Proceedings of the 38th AMOP Technical Seminar on Environmental Contamination and Response, Vancouver, BC, Canada, 2–4 June 2015; pp. 16–35. [Google Scholar]
- Fingas, M. Oil Spill Science and Technology, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Huang, J.C. A review of the state-of-the-art of oil spill fate/behavior models. In Proceedings of the International Oil Spill Conference Proceedings, San Antonio, TX, USA, 28 February–3 March 1983; Volume 1983, pp. 313–322. [Google Scholar]
- Fernandes, R.; Necci, A.; Krausmann, E. Model(s) for the Dispersion of Hazardous Substances in Floodwaters for RAPID-N; EUR 30968 EN; Publications Office of the European Union: Luxembourg, 2022; ISBN 978-92-76-46707-6. [Google Scholar] [CrossRef]
- Keramea, P.; Spanoudaki, K.; Zodiatis, G.; Gikas, G.; Sylaios, G. Oil spill modeling: A critical review on current trends, perspectives and challenges. J. Mar. Sci. Eng. 2021, 9, 181. [Google Scholar] [CrossRef]
- Spaulding, M.L. A state-of-the-art review of oil spill trajectory and fate modeling. Oil Chem. Pollut. 1989, 4, 39–55. [Google Scholar] [CrossRef]
- Guo, W.; Wu, G.; Jiang, M.; Xu, T.; Yang, Z.; Xie, M.; Chen, X. A modified probabilistic oil spill model and its application to the Dalian New Port accident. Ocean. Eng. 2016, 121, 291–300. [Google Scholar] [CrossRef]
- Saçu, Ş.; Şen, O.; Erdik, T. A stochastic assessment for oil contamination probability: A case study of the Bosphorus. Ocean. Eng. 2021, 231, 109064. [Google Scholar] [CrossRef]
- Dąbrowska, E. Conception of oil spill trajectory modelling: Karlskrona seaport area as an investigative example. In Proceedings of the 2021 5th International Conference on System Reliability and Safety (ICSRS), Palermo, Italy, 24–26 November 2021; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2021; pp. 307–311. [Google Scholar] [CrossRef]
- Dąbrowska, E. Oil discharge trajectory simulation at selected Baltic Sea waterway under variability of hydro-meteorological conditions. Water 2023, 15, 1957. [Google Scholar] [CrossRef]
- Dąbrowska, E.; Kołowrocki, K. Monte Carlo simulation approach to determination of oil spill domains at port and sea waters areas. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 59–64. [Google Scholar] [CrossRef]
- Kołowrocki, K.; Soszyńska-Budny, J. Reliability and Safety of Complex Technical Systems and Processes: Modeling—Identification—Prediction—Optimization, 1st ed.; Springer: London, UK, 2011. [Google Scholar]
- Pietrucha-Urbanik, K.; Rak, J. Water, resources, and resilience: Insights from Diverse Environmental Studies. Water 2023, 15, 3965. [Google Scholar] [CrossRef]
- Tchórzewska-Cieślak, B.; Piegdoń, I. Matrix analysis of risk of interruptions in water supply in terms of consumer safety. J. Konbin 2012, 24, 125–140. [Google Scholar] [CrossRef]
- Fingas, M. The challenges of remotely measuring oil slick thickness. Remote Sens. 2018, 10, 319. [Google Scholar] [CrossRef]
- Fingas, M. How to measure slick thickness (or not). In Proceedings of the 35th AMOP Technical Seminar on Environmental Contamination and Response, Vancouver, BC, Canada, 5–7 June 2012; pp. 617–652. [Google Scholar]
- Global Marine Oil Pollution Information Gateway. What Happens to Oil in the Water? Available online: http://oils.gpa.unep.org/facts/fate.htm (accessed on 1 February 2024).
- Bogalecka, M.; Kołowrocki, K. Minimization of critical infrastructure accident losses of chemical releases impacted by climate-weather change. In Proceedings of the 2018 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bangkok, Thailand, 16–19 December 2018; pp. 1657–1661. [Google Scholar] [CrossRef]
- Yuriy, D.; Dobrin, M. Oil spills weathering. Ann. Rev. Res. 2022, 8, 555730. [Google Scholar]
- Torbicki, M. Longtime Prediction of Climate-Weather Change Influence on Critical Infrastructure Safety and Resilience. In Proceedings of the 2018 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bangkok, Thailand, 16–19 December 2018; pp. 996–1000. [Google Scholar] [CrossRef]
- Bogalecka, M. Consequences of Maritime Critical Infrastructure Accidents. Environmental Impacts. Modeling—Identification—Prediction—Optimization—Mitigation; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Dobrzycka-Krahel, A.; Bogalecka, M. The Baltic Sea under Anthropopressure—The Sea of Paradoxes. Water 2022, 14, 3772. [Google Scholar] [CrossRef]
- Magryta-Mut, B. Modeling safety of port and maritime transportation systems. Sci. J. Marit. Univ. Szczec. 2023, 74, 65–74. [Google Scholar] [CrossRef]
- Dąbrowska, E.; Torbicki, M. Hydro-Meteorological Changes Forecast of Southern Baltic Sea. Water, 2024; under review. [Google Scholar]
- Jakusik, E. The Impact of Climate Change on the Characteristics of the Wave in the Southern Part of the Baltic Sea and Its Consequences for the Polish Coastal Zone. Ph.D. Thesis, IMGW-PIB, Marine Research Department, Warsaw, Poland, 2012. [Google Scholar]
- Gdynia Maritime University Safety Interactive Platform. Available online: http://gmu.safety.umg.edu.pl/ (accessed on 1 February 2024).
- Rutgersson, A.; Kjellström, E.; Haapala, J.; Stendel, M.; Danilovich, I.; Drews, M.; Jylhä, K.; Kujala, P.; Larsén, X.G.; Halsnæs, K.; et al. Natural hazards and extreme events in the Baltic Sea region. Earth Syst. Dyn. 2022, 13, 251–301. [Google Scholar] [CrossRef]
- Dąbrowska, E. Modelling oil spill layer thickness and hydro-meteorological conditions impacts on its domain movement at sea area. In Safety and Reliability of Systems and Processes, Summer Safety and Reliability Seminar; Krzysztof, K., Magdalena, B., Ewa, D., Beata, M.-M., Eds.; Gdynia Maritime University: Gdynia, Poland, 2022; pp. 51–64. [Google Scholar] [CrossRef]



















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dąbrowska, E. Numerical Modelling and Prediction of Oil Slick Dispersion and Horizontal Movement at Bornholm Basin in Baltic Sea. Water 2024, 16, 1088. https://doi.org/10.3390/w16081088
Dąbrowska E. Numerical Modelling and Prediction of Oil Slick Dispersion and Horizontal Movement at Bornholm Basin in Baltic Sea. Water. 2024; 16(8):1088. https://doi.org/10.3390/w16081088
Chicago/Turabian StyleDąbrowska, Ewa. 2024. "Numerical Modelling and Prediction of Oil Slick Dispersion and Horizontal Movement at Bornholm Basin in Baltic Sea" Water 16, no. 8: 1088. https://doi.org/10.3390/w16081088
APA StyleDąbrowska, E. (2024). Numerical Modelling and Prediction of Oil Slick Dispersion and Horizontal Movement at Bornholm Basin in Baltic Sea. Water, 16(8), 1088. https://doi.org/10.3390/w16081088