
Mechanical Interaction in Pressurized Pipe Systems: Experiments and Numerical Models




Abstract
:1. Introduction
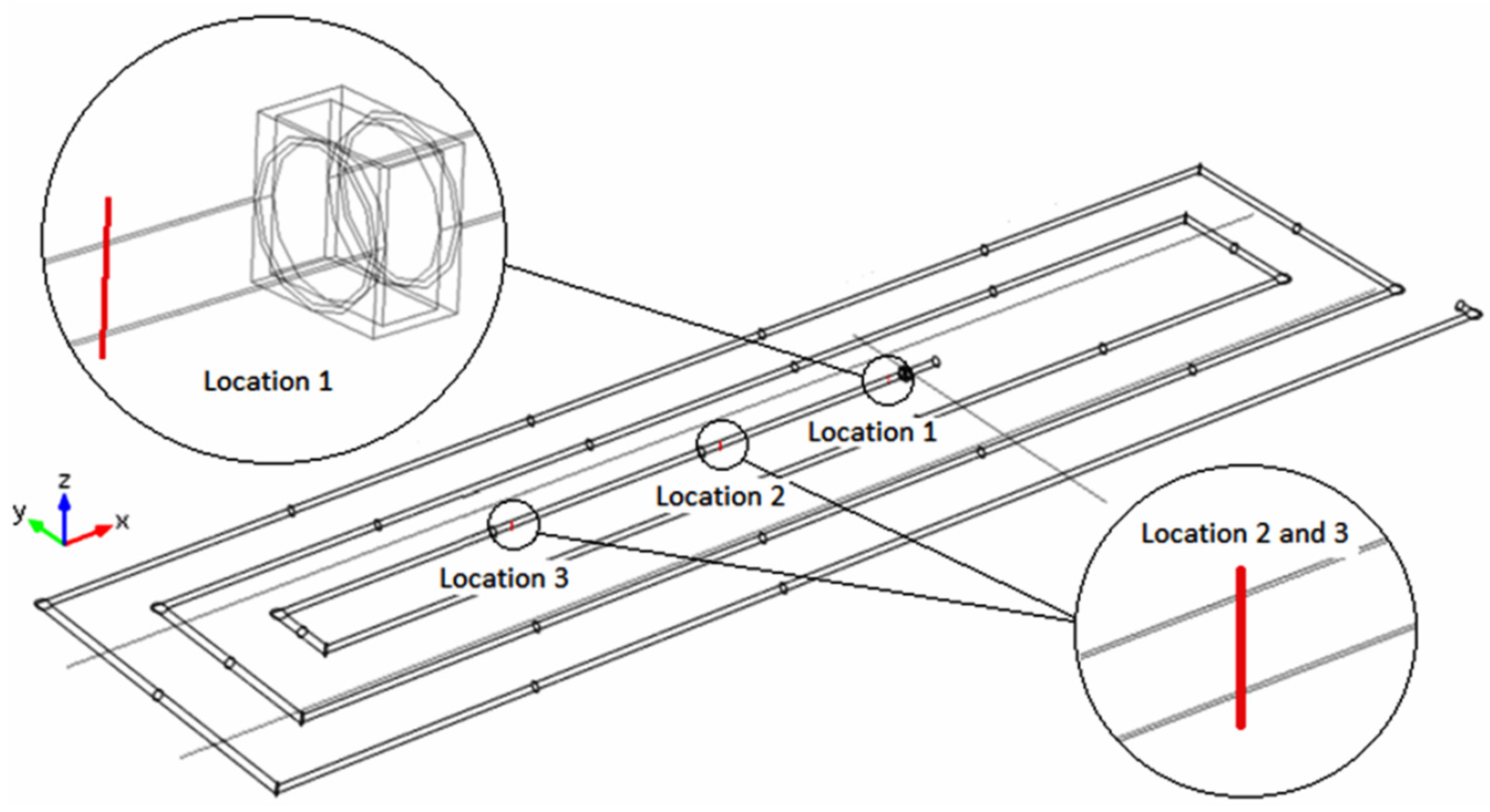
2. Experimental Study
Laboratory Facility




3. Methods
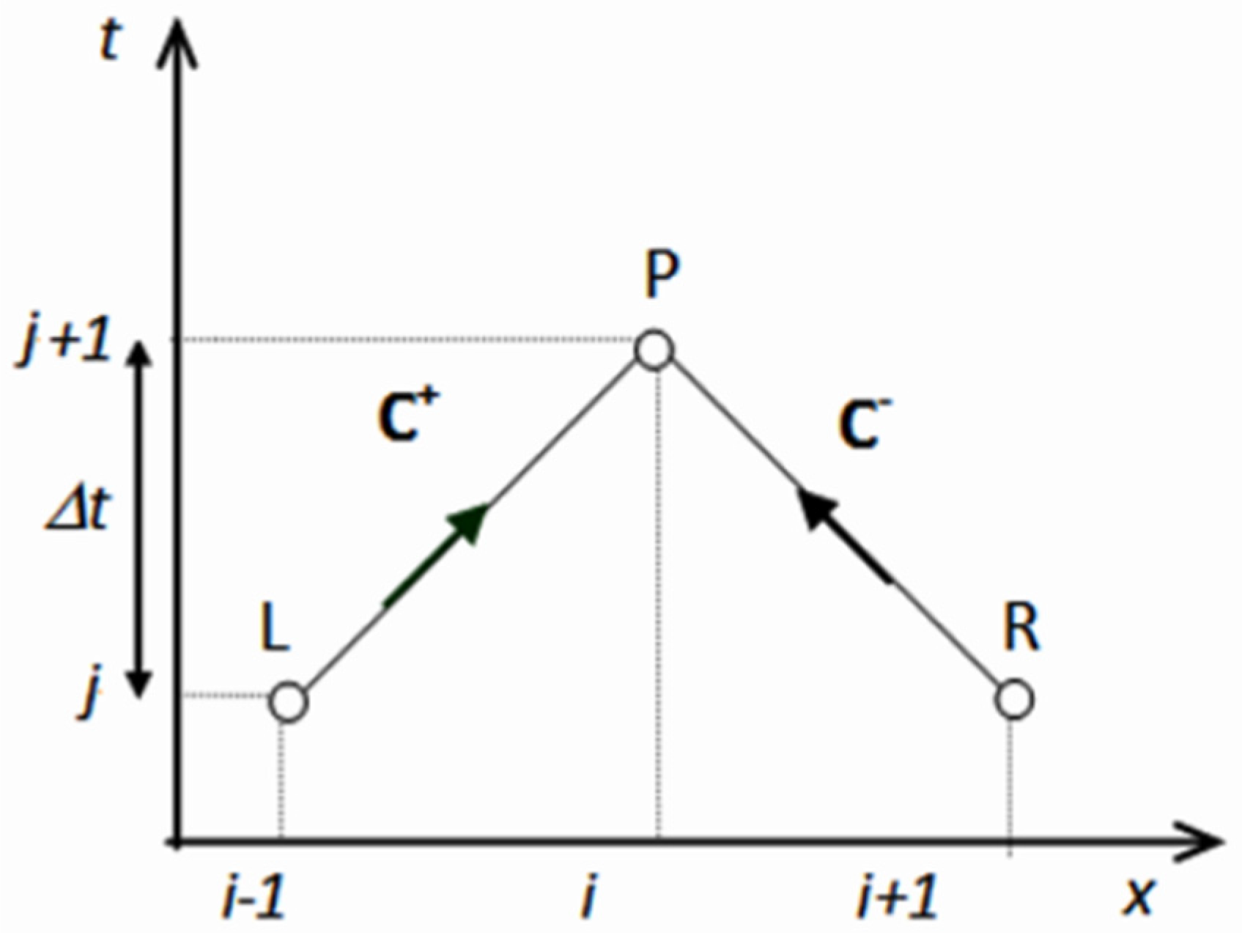
3.1. Modified Method of Characteristic Model with Non-Elastic Effects


| Description | Parameter/Coefficient | Value |
|---|---|---|
| Upstream head (m) | H | 14.4 |
| Discharge (m3/s) | Q | 0.009 |
| Wave speed (m/s) | 350 | |
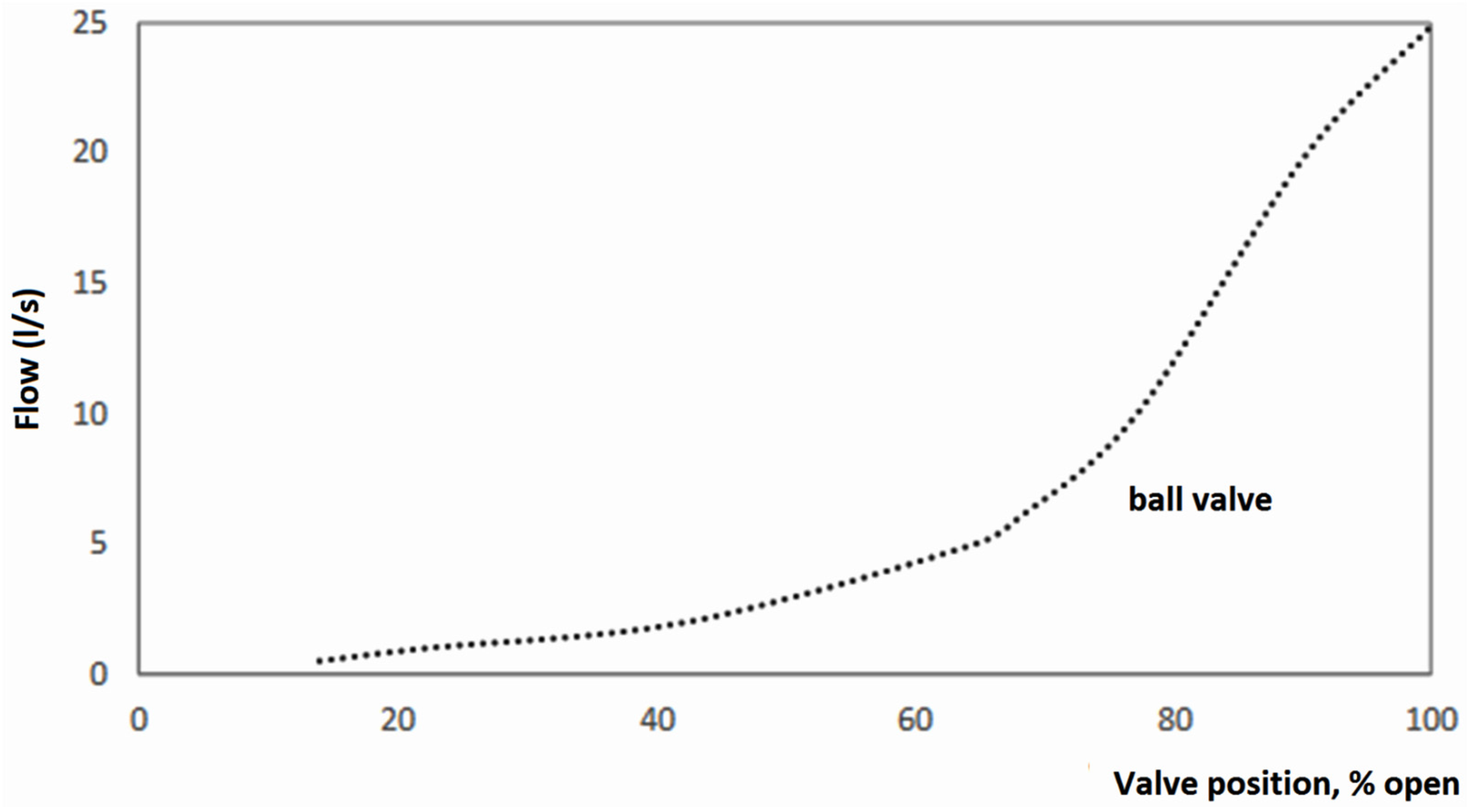
| Time closure of the ball valve (s) | tf | 0.20 |
| Total simulation time (s) | tt | 3 |
| Head coefficient induced by a discharge variation by non-elastic fluid and pipe deformation (--) | KH | 0.32 |
| Discharge coefficient induced by a head variation, due to a non-elastic response in the recuperation phase of the deformation (--) | KQ | 2.9 |
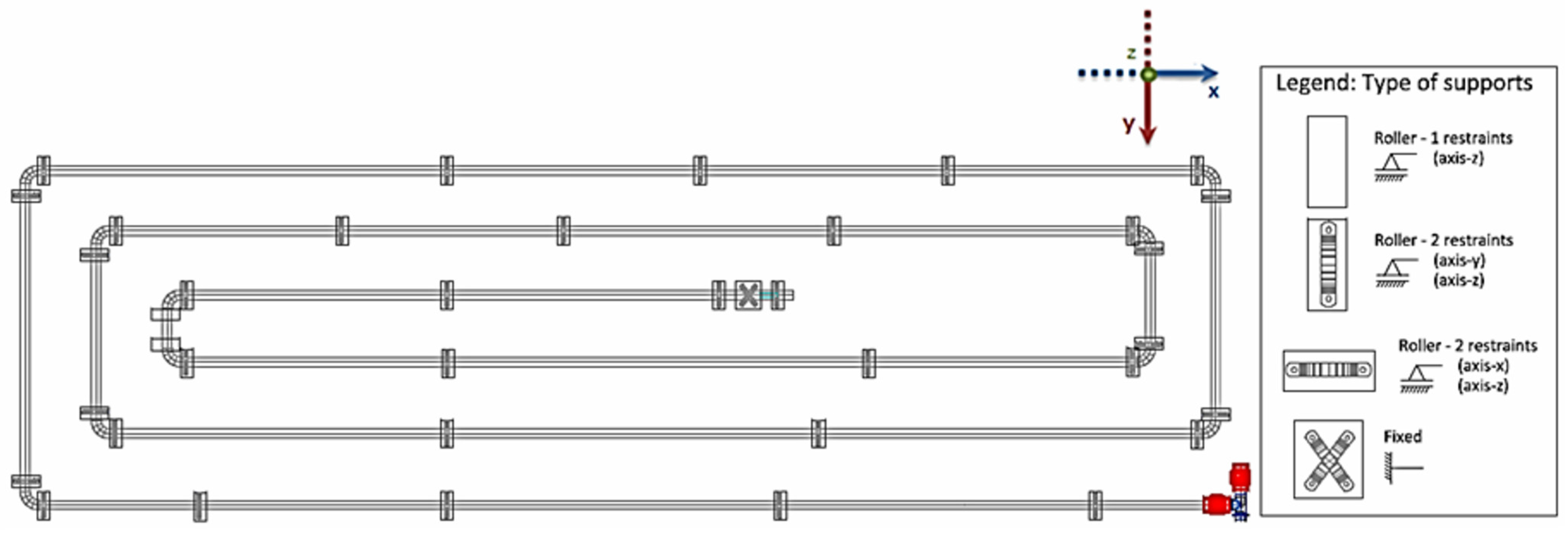
| Support Conditions | Non-Dimensional Parameter () |
|---|---|
| Pipe with frequent expansion joints | |
| Pipe against longitudinal movement throughout its length | |
| Pipe against longitudinal movement at the upper end |
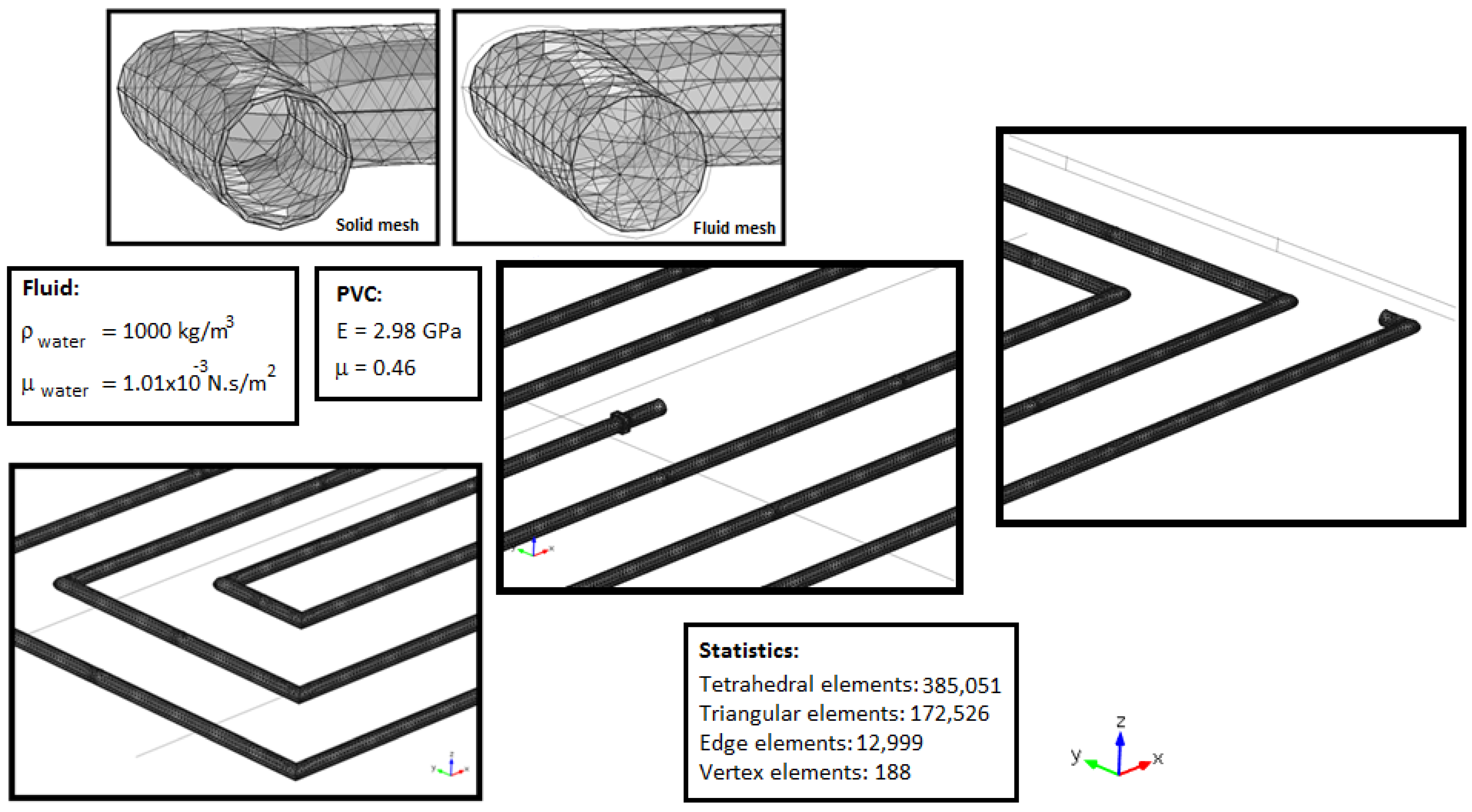
| Material | PVC | ||
|---|---|---|---|
| Di (m) | 0.107 | ||
| e (m) | 0.0035 | ||
| E (GPa) | 2.98 | ||
| K (N/m2) | 2.19 × 109 | ||
| (kg/m3) | 1000 | ||
| (--) | 0.46 | ||
| 1 | 0.79 | 0.77 | |
| c (m/s) | 300 | 350 | 350 |
| wave speed adopted (m/s) | 350 | ||

3.2. FSI Modeling and Solution
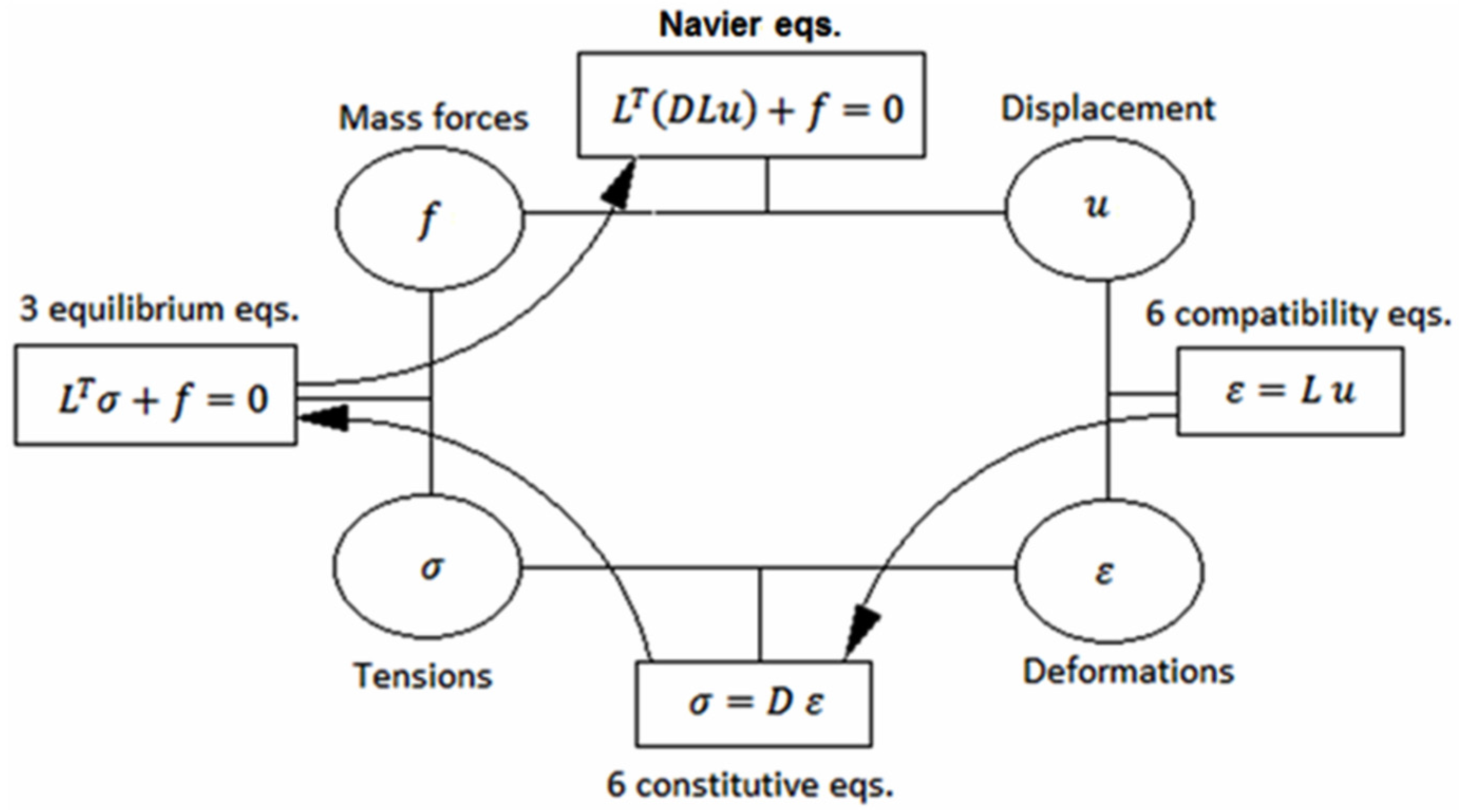
3.2.1. Basic Concepts

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3.2.2. Geometry and Mesh Adaptation



3.2.3. Boundary Conditions



4. Results
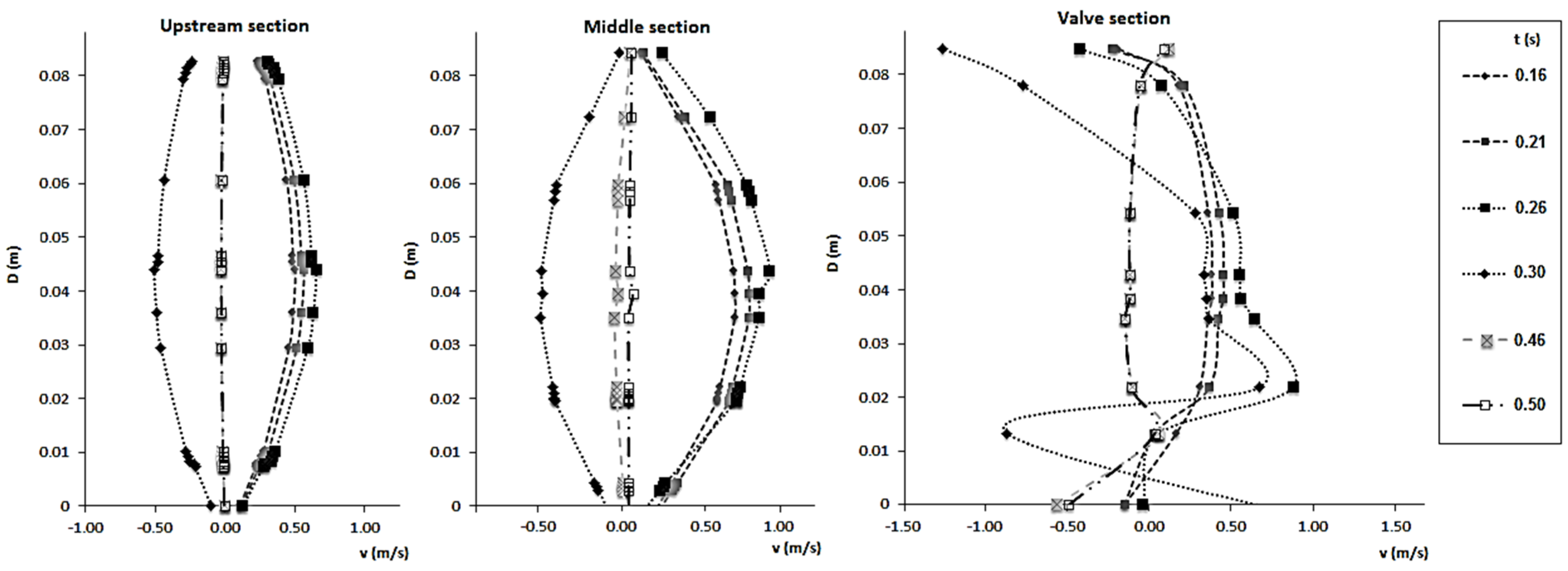
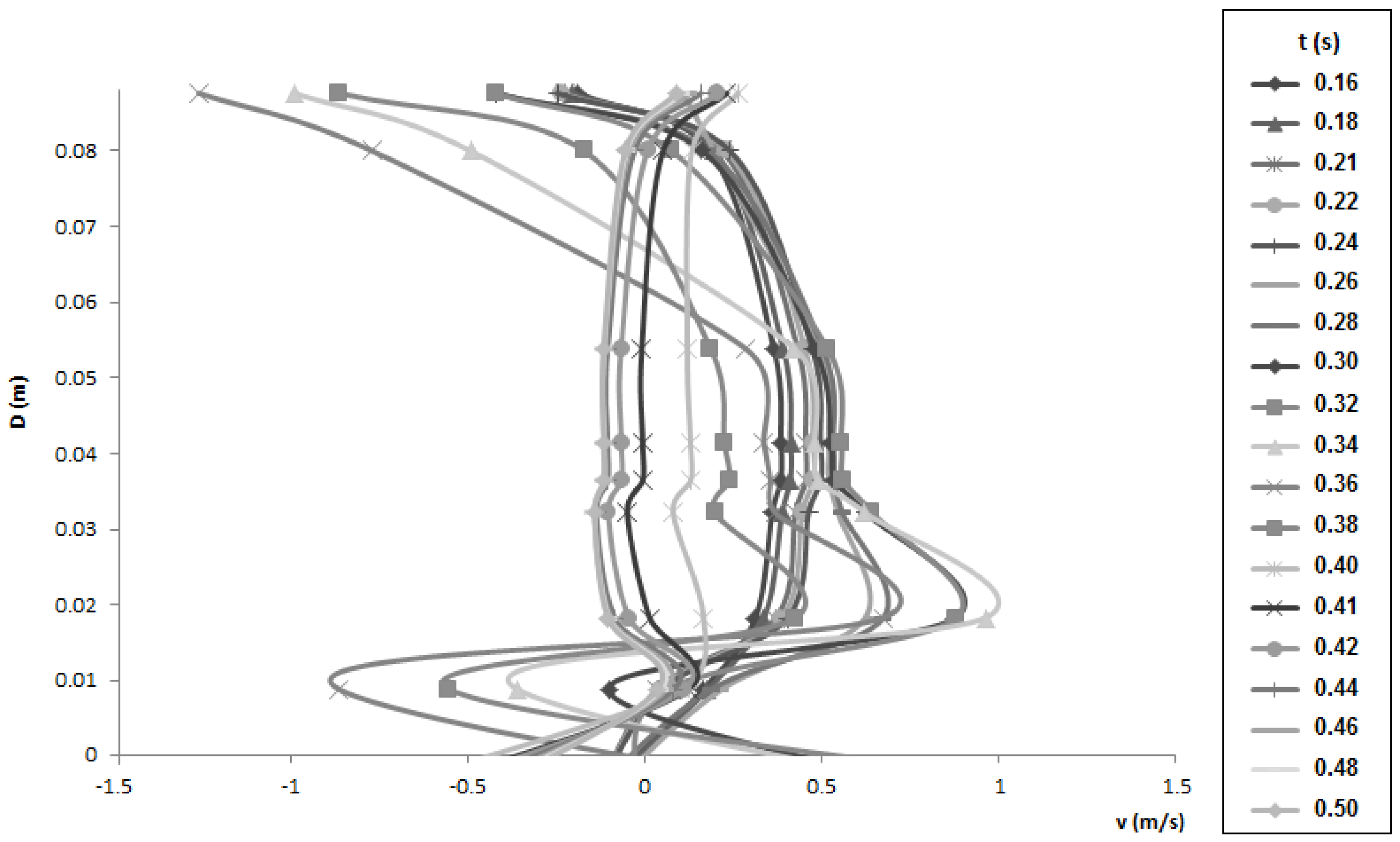
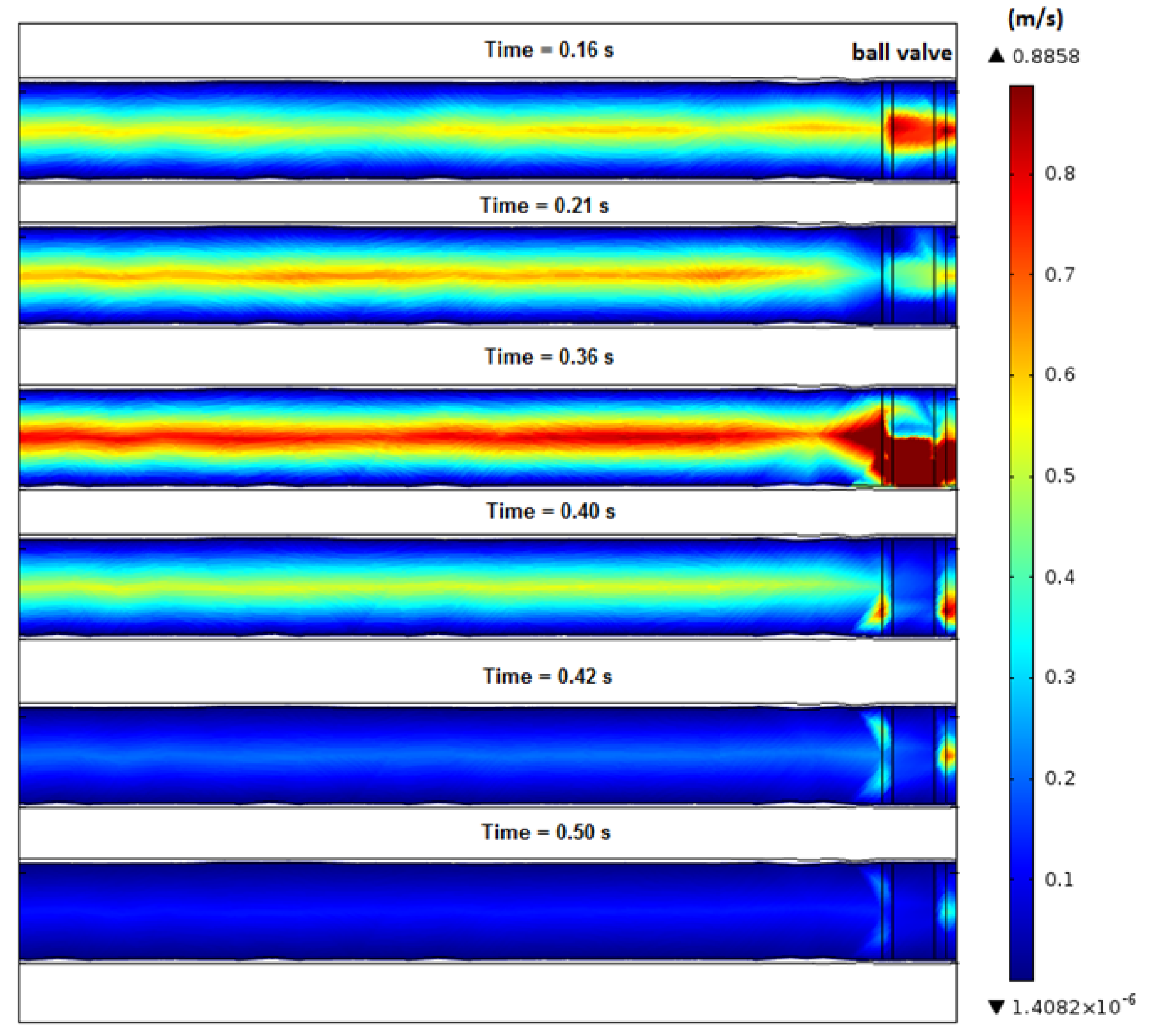
4.1. Velocity Profiles






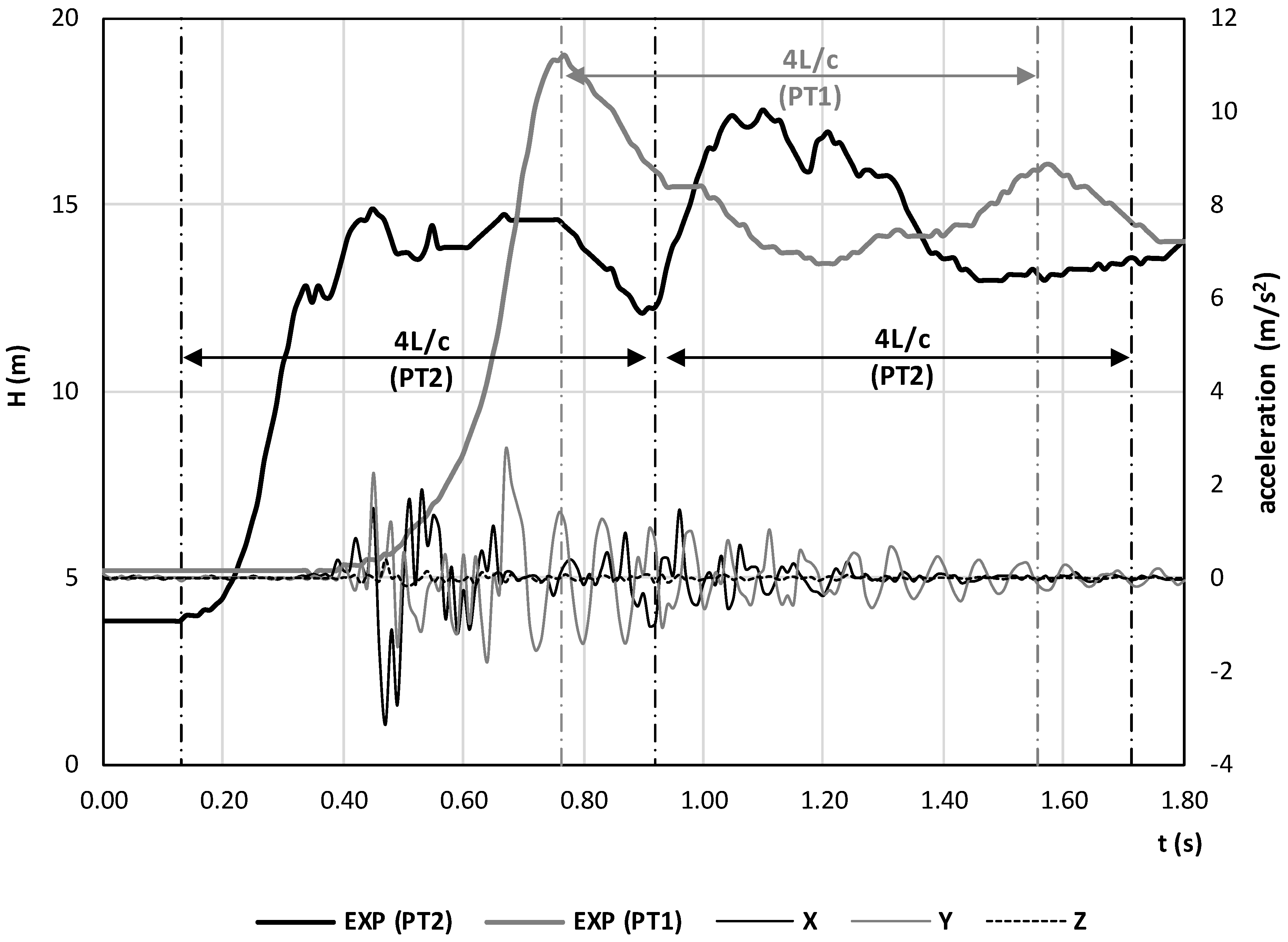
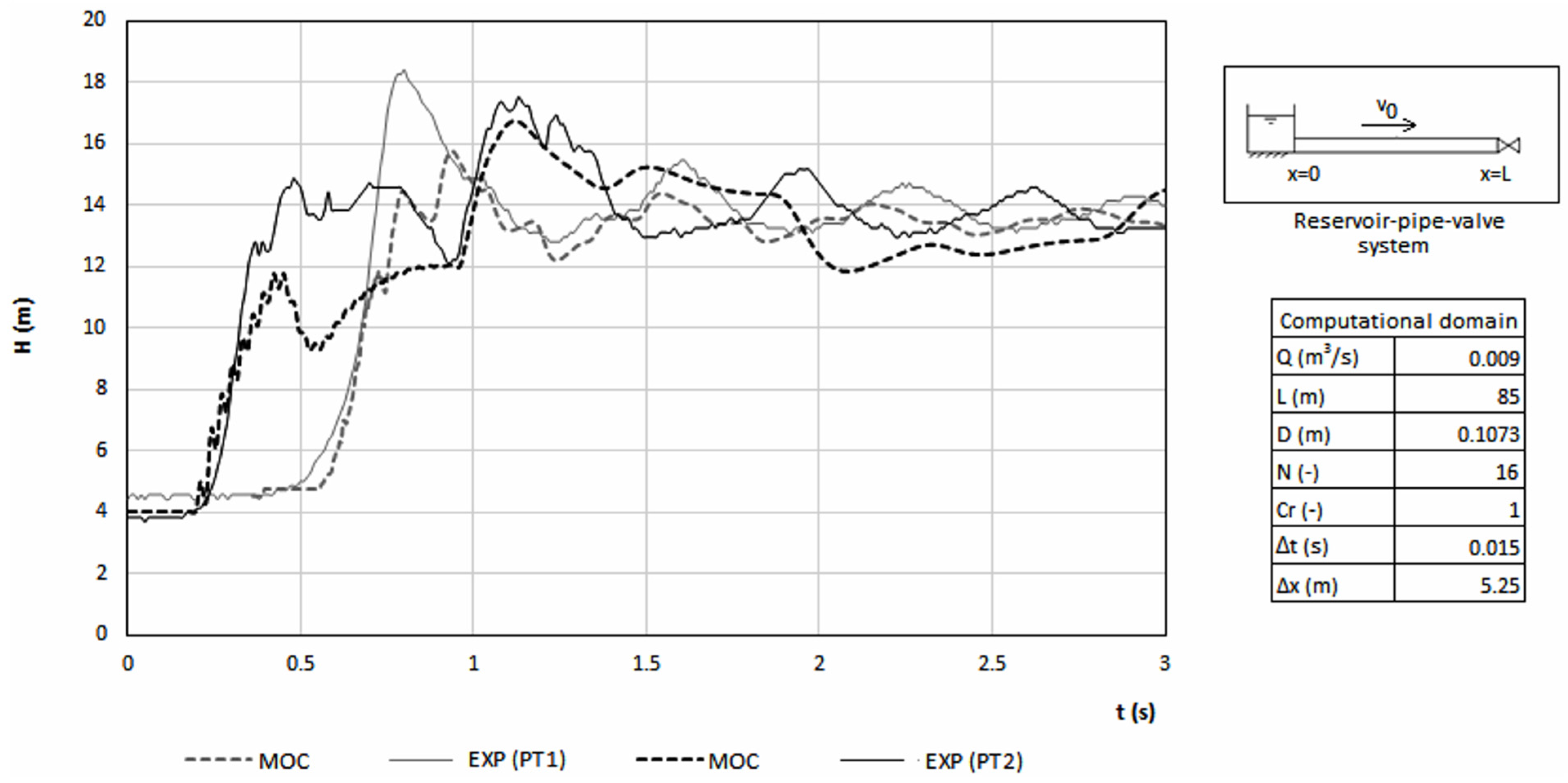
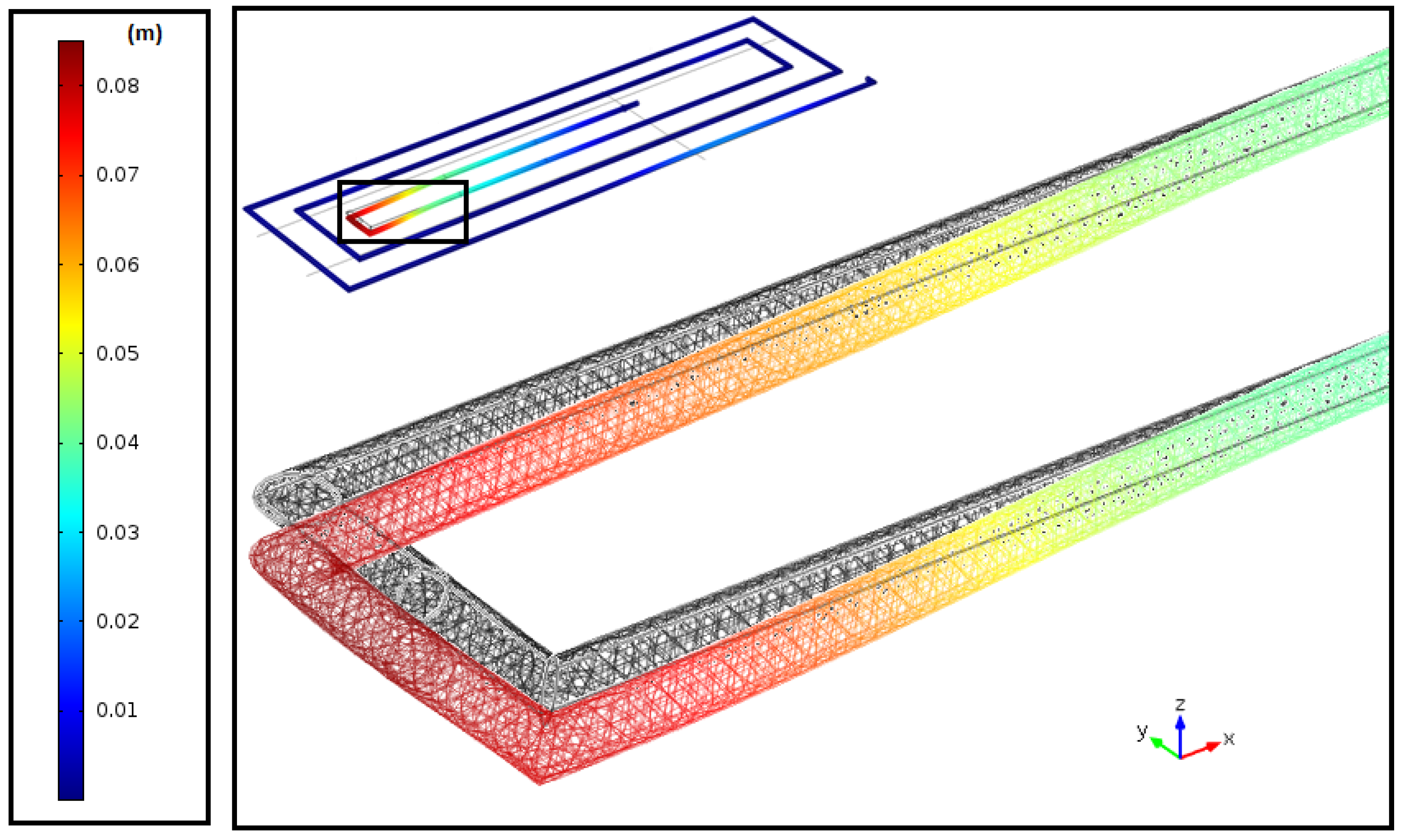
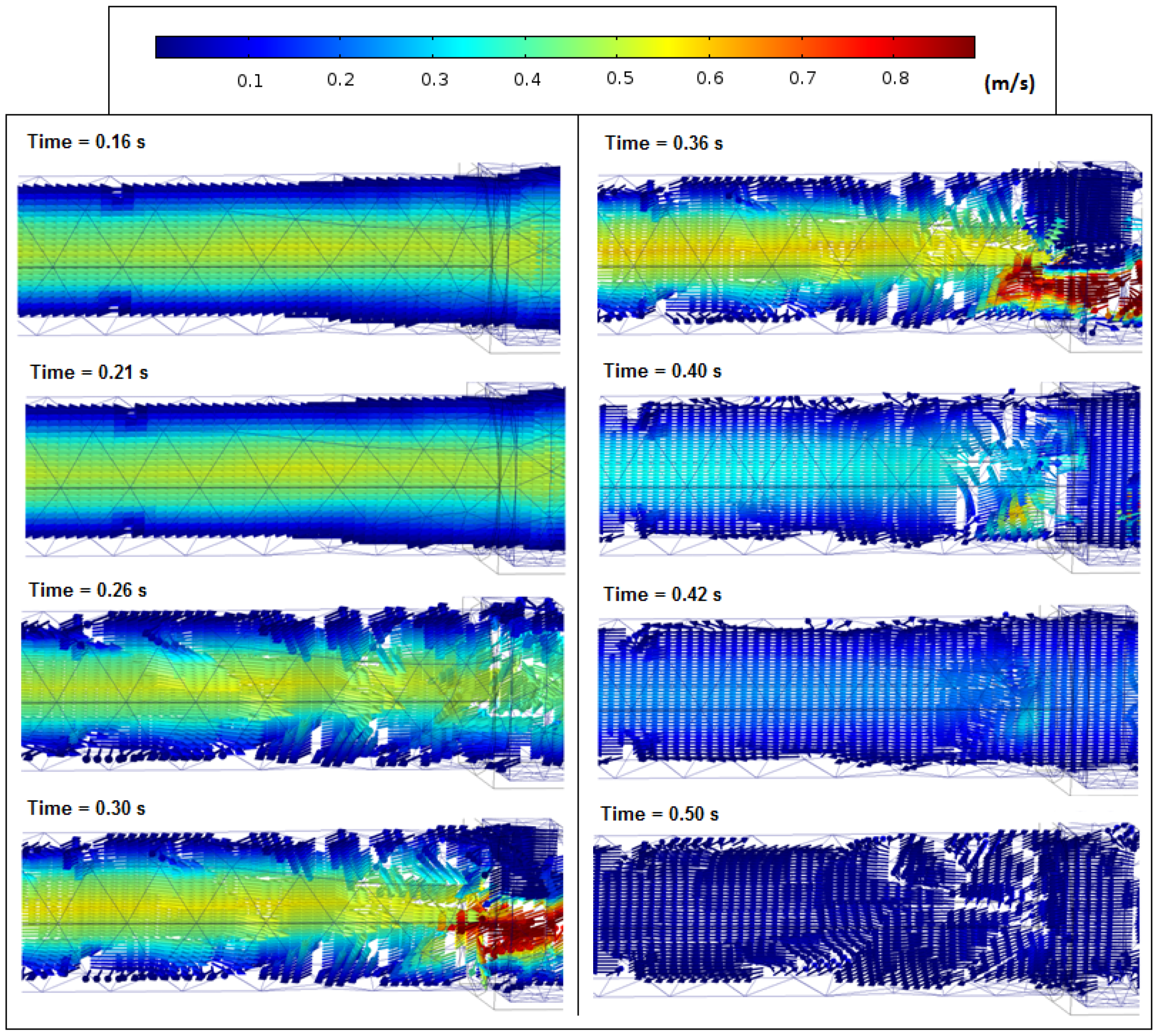
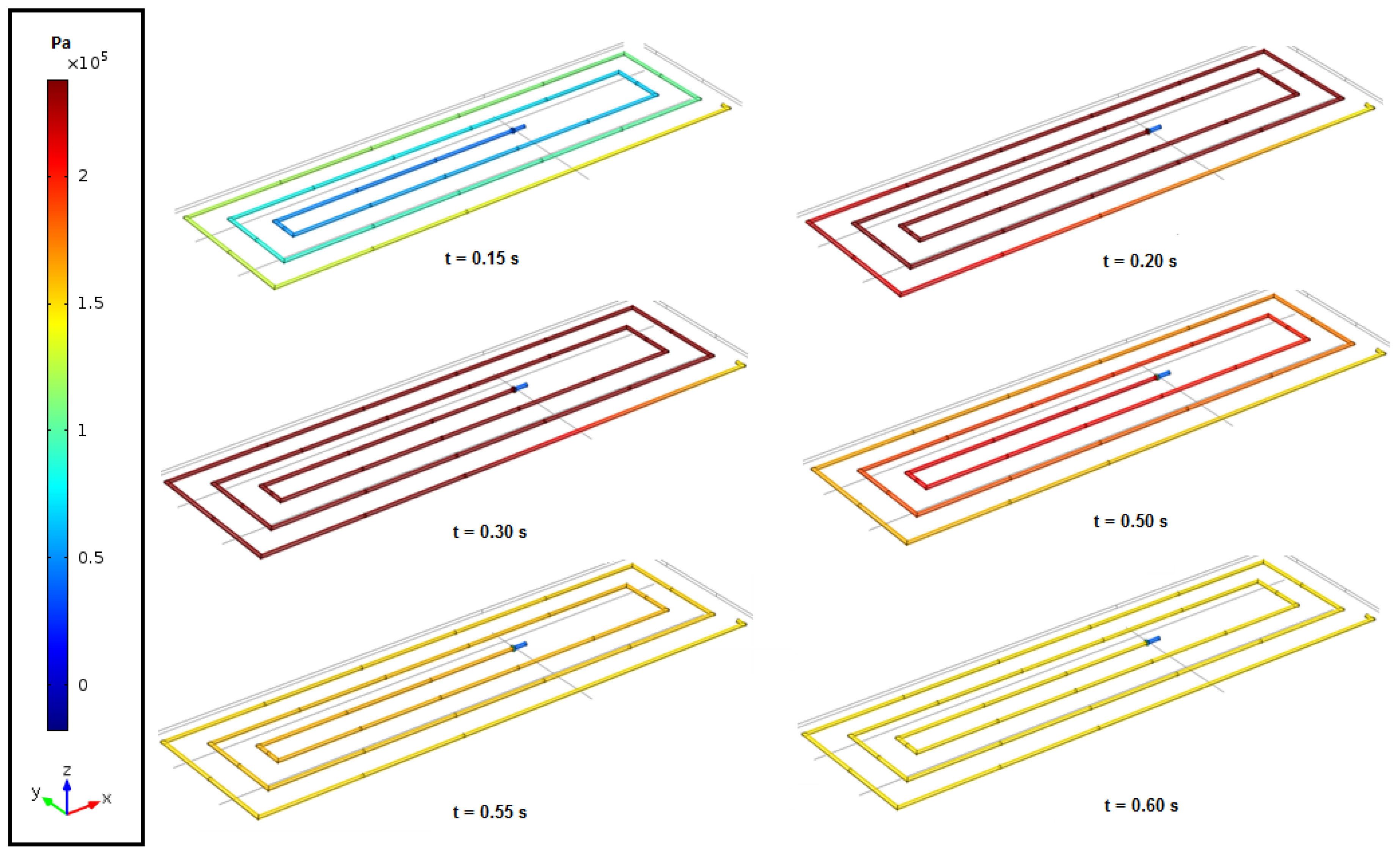
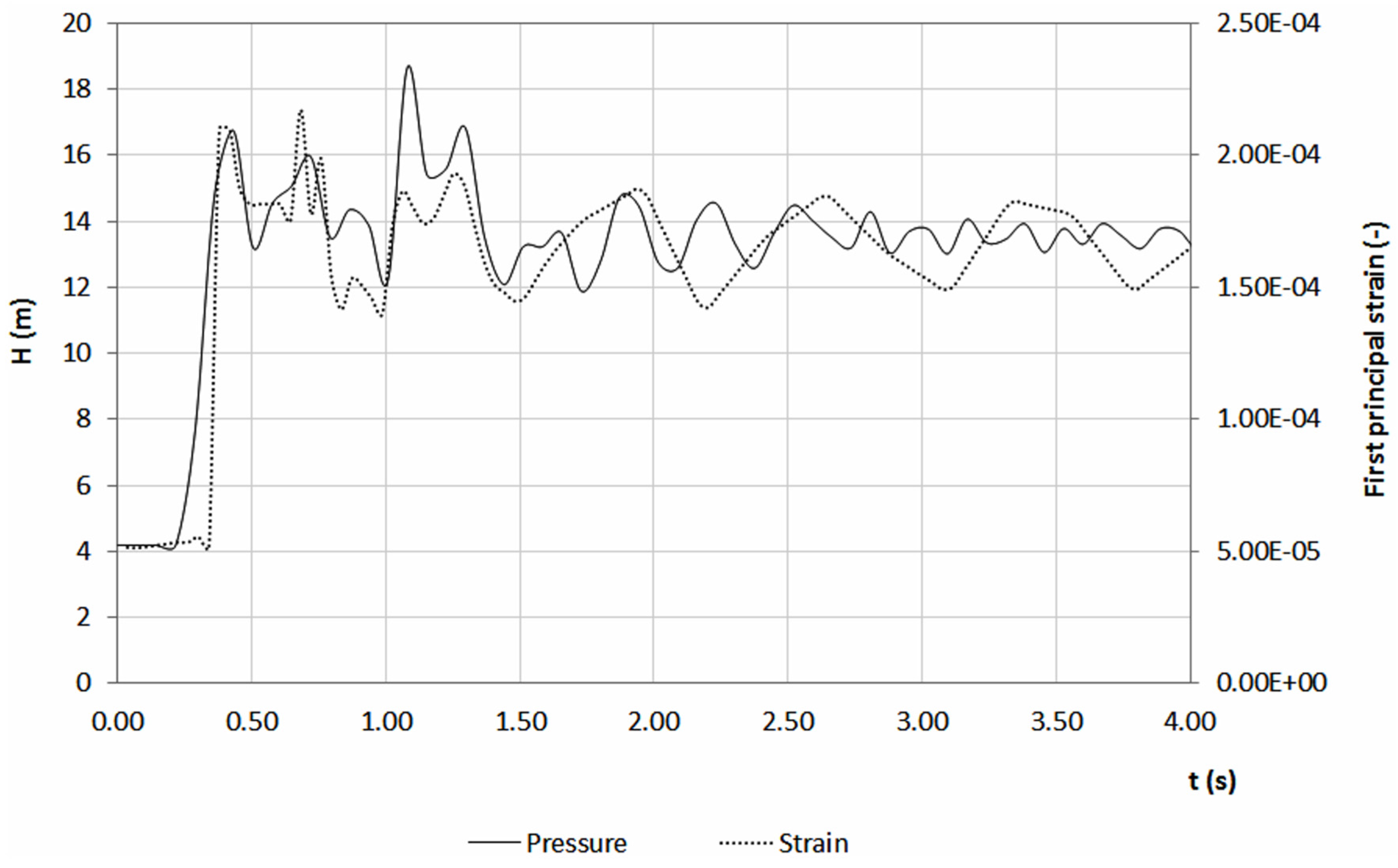
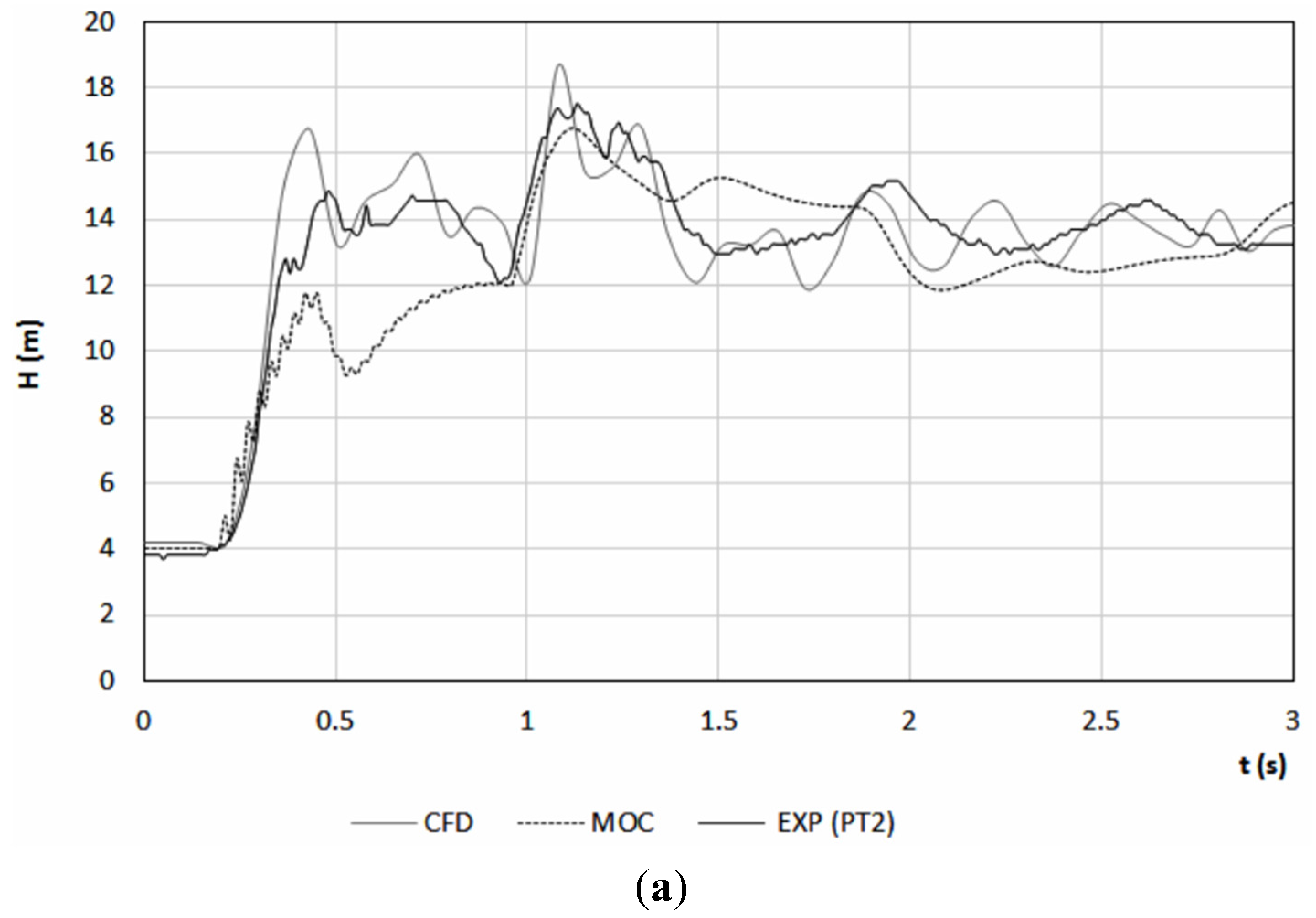
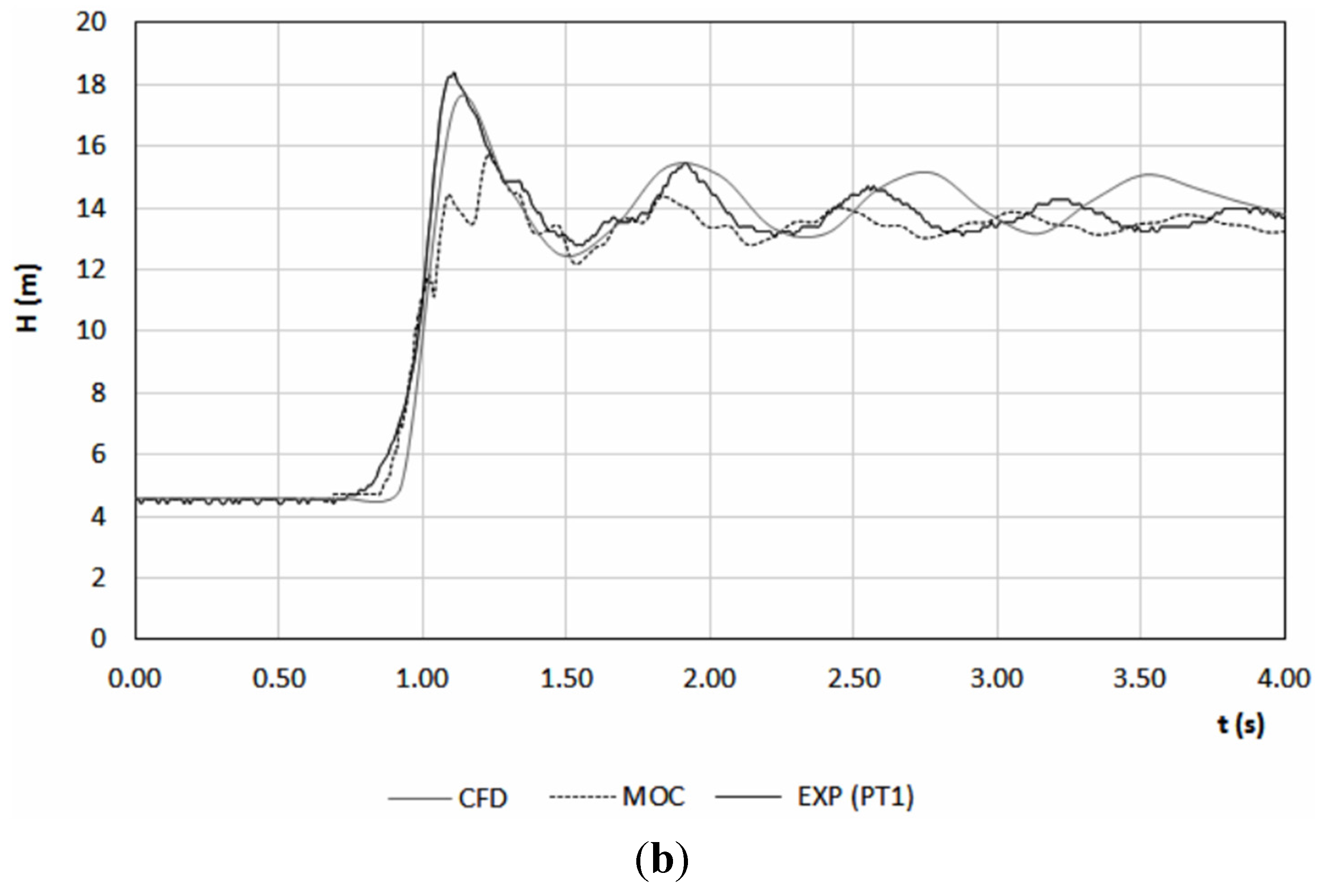
4.2. Wave Propagation and Pipe Displacements



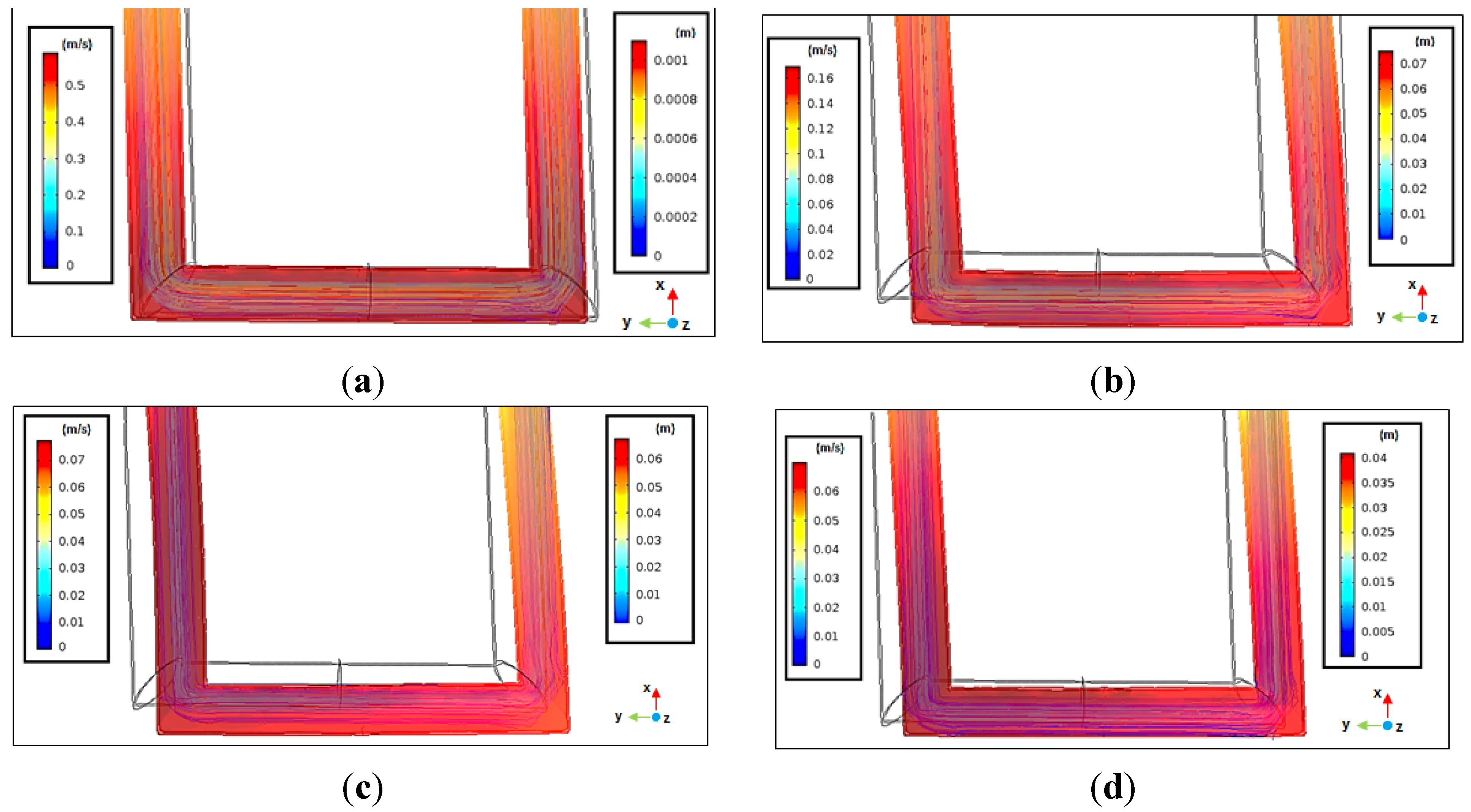
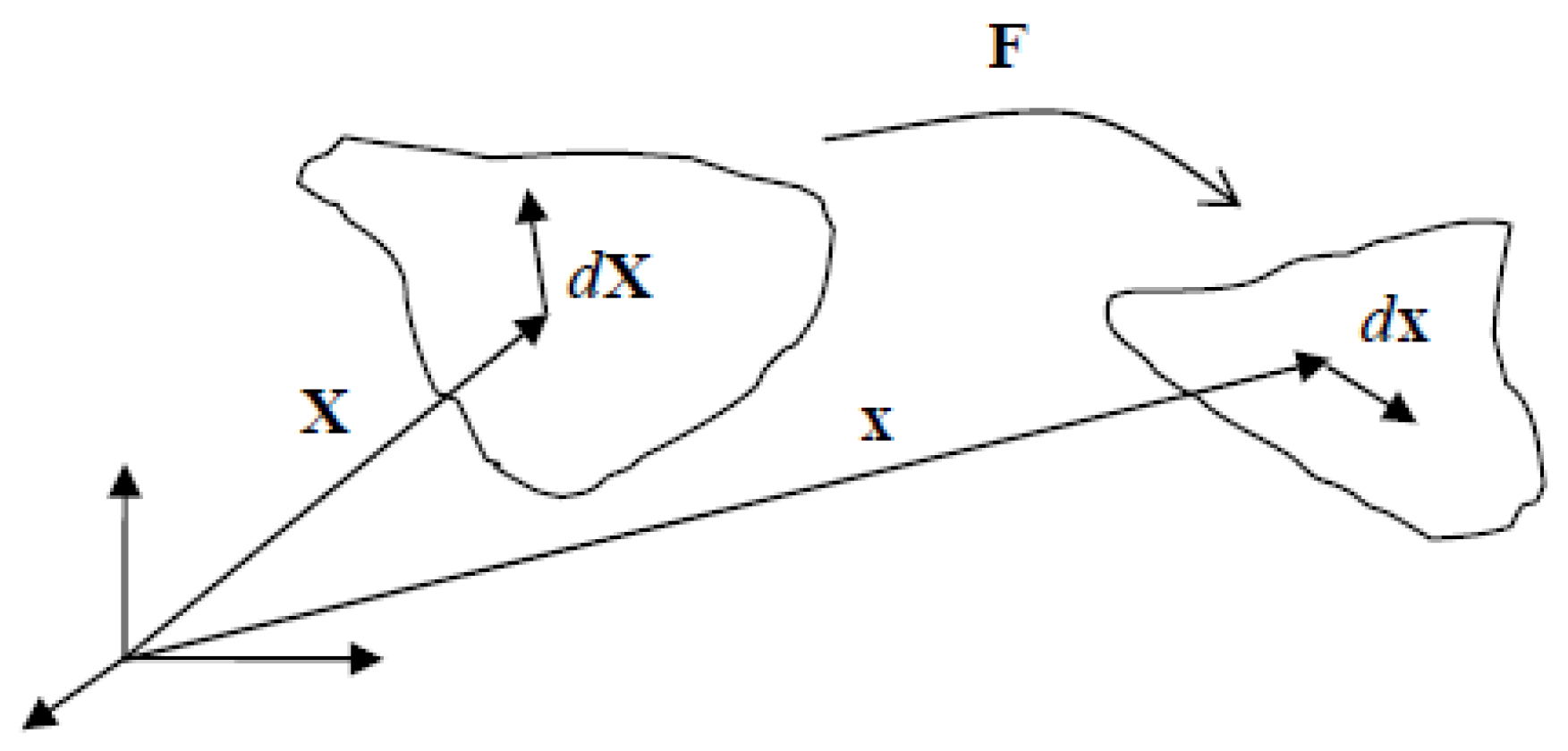
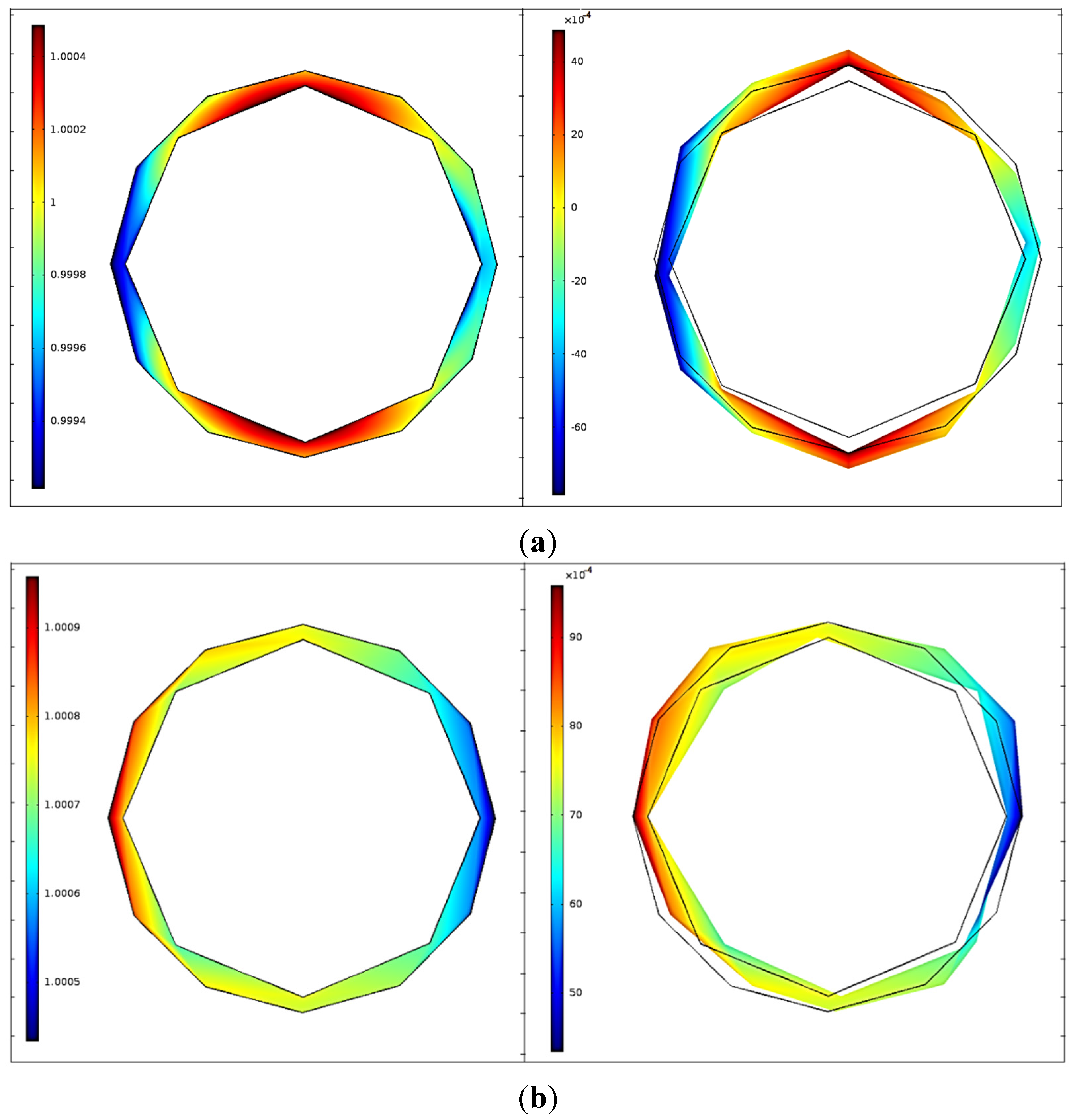
4.3. Deformation Gradient


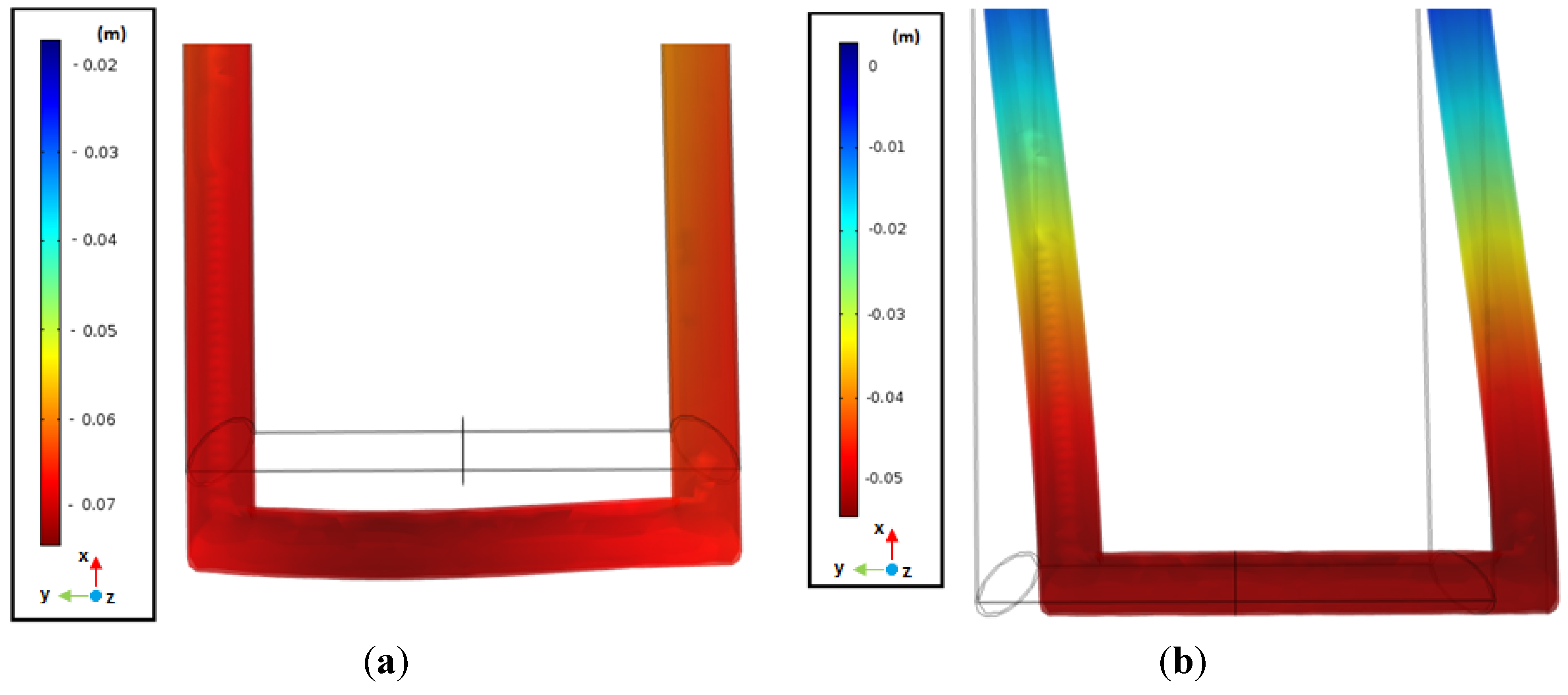
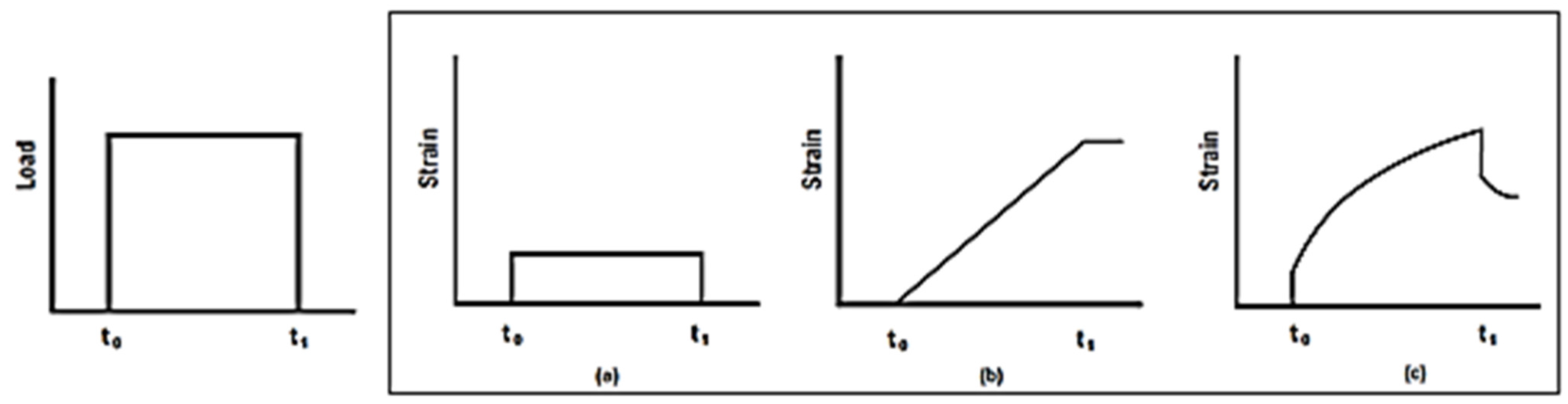
4.4. Stress/Strain Response


5. Discussion


| Parameter | Experimental Data | MOC Model | CFD Model |
|---|---|---|---|
| (m) | 18.2 | 16.0 | 17.9 |
| (m) | 17.5 | 17.0 | 19.0 |
| (m) | 0.063 | -- | 0.087 |
| (m) | 0.037 | -- | 0.051 |
| (m) | 0.053 | -- | 0.071 |
| Relative error (of pressure) | 12% | 8% | |

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bathe, K.J.; Wilson, E.L.; Peterson, F.E. SAPIV—A Structural Analysis Program for Static and Dynamic Response of Linear Systems; Department of Civil Engineering, University of California: Berkeley, CA, USA, 1973. [Google Scholar]
- Lüdecke, H.J.; Kothe, B. Water hammer. In Communications; Aktiengesellschaft, K.S.B., Ed.; Know-How: Halle, Germany, 2006. [Google Scholar]
- Turki, A. Modeling of Hydraulic Transients in Closed Conduits. Master’s Thesis, Department of Civil and Environmental Engineering, Fort Collins, CO, USA, 2013. [Google Scholar]
- Casadei, F.; Halleux, J.P.; Sala, A.; Chillè, F. Transient fluid-structure interaction algorithms for large industrial applications. Comput. Methods Appl. Mech. Eng. 2001, 190, 3081–3110. [Google Scholar] [CrossRef]
- Wiggert, D.C.; Tijsseling, A.S. Fluid Transients and Fluid-Structure Interaction in Flexible Piping Systems. Reports on Applied and Numerical Analysis; Department of Mathematics and Computing Science, Eindhoven University of Technology: Eindhoven, The Netherlands, 2001. [Google Scholar]
- Wiggert, D.C.; Tijsseling, A.S. Fluid transients and fluid-structure interaction in flexible liqui-filled piping. Appl. Mech. Rev. 2001, 54, 455–481. [Google Scholar] [CrossRef]
- Tijsseling, A.S. Fluid-Structure Interaction in Liquid-Filled Pipe Systems. J. Fluids Struct. 1996, 10, 109–146. [Google Scholar] [CrossRef]
- Almeida, A.B.; Pinto, A.A.M. A special case of transient forces on pipeline supports due to water hammer effects. In Proceedings of the 5th International Conference on Pressure Surges, Hanover, Germany, 22–24 September 1986; pp. 27–34.
- Obradovíc, P. Fluid-Structure interactions: An accident which has demostrated the necessity for FSI analysis. In Proceedings of the 15th IAHR Symposium on Hydraulic Machinery and Cavitation, Belgrade, Yugoslavia, 11–14 September 1990.
- Wang, C.Y.; Pizzica, P.A.; Gvildys, J.; Spencer, B.W. Analysis of fluid-structure interaction and structural response of Chernobyl-4 reactor. In Proceedings of the SMiRT10, Anaheim, CA, USA, 22–27 August 1989; pp. 109–119.
- Chaudhry, M.H. Applied Hydraulic Transients; Van Nostrand Reinhold Company: New York, NY, USA, 1979. [Google Scholar]
- Ramos, H.; Borga, A.; Covas, D.; Loureiro, D. Surge damping analysis in pipe systems: Modelling and experiments. (Effet d’atténuation du coup de bélier dans les systèmes de conduits: Modelation mathematique et experiences). J. Hydraul. Res. 2004, 42, 413–425. [Google Scholar] [CrossRef]
- Chaudhry, M.H.; Holloway, M.B. Stability of Method of Charaterisitcs. In Proceedings of the Hydraulics Division Specialty Conference, American Society of Civil Engineers, Coeur d’Alene, ID, USA, 14–17 August 1984; pp. 216–220.
- Almeida, A.B.; Koelle, E. Fluid Transients in Pipe Networks. In Computational Mechanics Publications; Elsevier Applied Science: Southampton, UK, 1992. [Google Scholar]
- Wylie, E.B.; Streeter, V.L. Fluid Transients in Systems; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Chaudhry, M.H.; Hussaini, M.Y. Second order explicit methods for water hammer analysis. J. Fluids Eng. 1993, 107, 523–529. [Google Scholar] [CrossRef]
- Ramos, H.M.; Borga, A.; Covas, D.; Almeida, A. Analysis of Surge Effects in Pipe Systems by Air Release/Venting; APRH: Lisbon, Portugal, 2005; pp. 45–55. [Google Scholar]
- Turpin, J.B. Variable step integration coupled with the method of characteristics solution for water-hammer analysis, a case study. In Proceedings of the 52nd Jannaf Propulsion Meeting, Las Vegas, NV, USA, 10–13 May 2004.
- Hou, Q.; Kruisbrink, A.C.H.; Tijsseling, A.S.; Keramat, A. Simulating water hammer with corrective smoothed particle method, BHR Group. In Proceedings of the 11th International Conference on Pressure Surges, Lisbon, Portugal, 24–26 October 2012; pp. 171–187.
- Bughazem, M.B.; Anderson, A. Problems with simple models for damping in unsteady flow. In Proceedings of the 7th International Conference on Pressure Surges and Fluid Transients in Pipelines and Open Channels, 16–18 April 1996; BHR Group Ltd: Harrogate, UK, 1996; pp. 537–549. [Google Scholar]
- Ferreira, A.J.M. Problems of Finite Element in MatLab; Fundação Calouste Gulbenkian: Lisbon, Portugal, 2010. [Google Scholar]
- Timoshenko, S.P.; Goodier, J.N. Theory of Elasticity; McGraw-Hill: Singapore, 1970. [Google Scholar]
- Arienti, M.; Hung, P.; Shepherd, J.E. Alevel set approach to Eulerian-Lagrangian coupling. J. Comput. Phys. 2003, 185, 213–251. [Google Scholar] [CrossRef]
- Bathe, K.J.; Zhang, H. A mesh adaptivity procedure for CFD and fluid-structure interactions. Comput. Struct. 2009, 87, 604–617. [Google Scholar] [CrossRef]
- Simão, M.; Mora-Rodriguez, J.; Ramos, H.M. Fluid–structure interaction with different coupled models. J. Water Supply Res. Technol. AQUA 2015. [Google Scholar] [CrossRef]
- Causin, P.; Gerbeau, J.F.; Nobile, F. Added-mass effect in the design of partitioned algorithms for fluidstructure problems. Comput. Methods Appl. Mech. Eng. 2005, 194, 4506–4527. [Google Scholar] [CrossRef]
- Felippa, C.A.; Park, K.C.; Farhat, C. Partitioned Analysis of Coupled Mechanical Systems. Comput. Methods Appl. Mech. Eng. 2001, 190, 3247–3270. [Google Scholar] [CrossRef]
- Vaassen, J.M.; de Vincenzo, P.; Hirsch, C.; Leonard, B. Strong Coupling Algorithm to Solve Fluid-Structure-Interaction Problems with a Staggered Approach. In Proceedings of the 7th European Symposium on Aerothermodynamics; Ouwehand, L., Ed.; European Space Agency: Noordwijk, The Netherlands, 2011. [Google Scholar]
- Hou, G.; Wang, J.; Layton, A. Numerical Methods for Fluid-Structure Interaction—A Review. Commun. Comput. Phys. 2012, 12, 337–377. [Google Scholar] [CrossRef]
- Nobile, F.; Vergara, C. Partitioned algorithms for fluidstructure interaction problems in haemodynamics. Milan J. Math. 2012, 80, 443–467. [Google Scholar] [CrossRef]
- González, J.A.; Park, K.C.; Lee, I.; Felippa, C.A.; Ohayon, R. Partitioned Vibration Analysis of Internal Fluid-Structure Interaction Problems. Int. J. Numer. Methods Eng. 2012, 92, 268–300. [Google Scholar] [CrossRef]
- Badia, S.; Nobile, F.; Vergara, C. Fluidstructure partitioned procedures based on Robin transmission conditions. J. Comput. Phys. 2008, 227, 7027–7051. [Google Scholar] [CrossRef]
- Forster, C.; Wall, W.; Ramm, E. Artificial added mass instabilities in sequential staggered coupling of nonlinear structures and incompressible viscous flow. Comput. Methods Appl. Mech. Eng. 2007, 196, 1278–1293. [Google Scholar] [CrossRef]
- Steinstrasser, C.E. Método Difusivo de Lax Aplicado na Solução das Equações de Saint Venant; Universidade Federal do Paraná: Curitiba, Brazil, 2005. [Google Scholar]
- Moussou, P.; Lafon, P.; Potapov, S.; Paulhiac, L.; Tijsseling, A. Industrial cases of FSI due to internal flows. In Proceedings of the 9th International Conference on Pressure Surges, Chester, UK, 24–26 March 2004; BHR Group Ltd.: Cranfield, UK, 2004; pp. 167–181. [Google Scholar]
- Budny, D.D. The Influence of Structural Damping on the Internal Fluid Pressure during a Fluid Transient Pipe Flow. Ph.D. Thesis, Department of Civil and Environmental Engineering, Michigan State University, East Lansing, MI, USA, 1988. [Google Scholar]
- Fan, D. Fluid Structure Interactions in Internal Flows. Ph.D. Thesis, Department of Civil Engineering, The University of Dundee, Dundee, UK, 1989. [Google Scholar]
- Greenshields, C.J.; Weller, H.G.; Ivankovic, A. The finite volume method for coupled fluid flow and stress analysis. Comput. Model. Simul. Eng. 1999, 4, 213–218. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simão, M.; Mora-Rodriguez, J.; Ramos, H.M. Mechanical Interaction in Pressurized Pipe Systems: Experiments and Numerical Models. Water 2015, 7, 6321-6350. https://doi.org/10.3390/w7116321
Simão M, Mora-Rodriguez J, Ramos HM. Mechanical Interaction in Pressurized Pipe Systems: Experiments and Numerical Models. Water. 2015; 7(11):6321-6350. https://doi.org/10.3390/w7116321
Chicago/Turabian StyleSimão, Mariana, Jesus Mora-Rodriguez, and Helena M. Ramos. 2015. "Mechanical Interaction in Pressurized Pipe Systems: Experiments and Numerical Models" Water 7, no. 11: 6321-6350. https://doi.org/10.3390/w7116321
APA StyleSimão, M., Mora-Rodriguez, J., & Ramos, H. M. (2015). Mechanical Interaction in Pressurized Pipe Systems: Experiments and Numerical Models. Water, 7(11), 6321-6350. https://doi.org/10.3390/w7116321