Robot-Assisted Measurement for Hydrologic Understanding in Data Sparse Regions


Abstract
:
1. Introduction
2. Materials and Methods
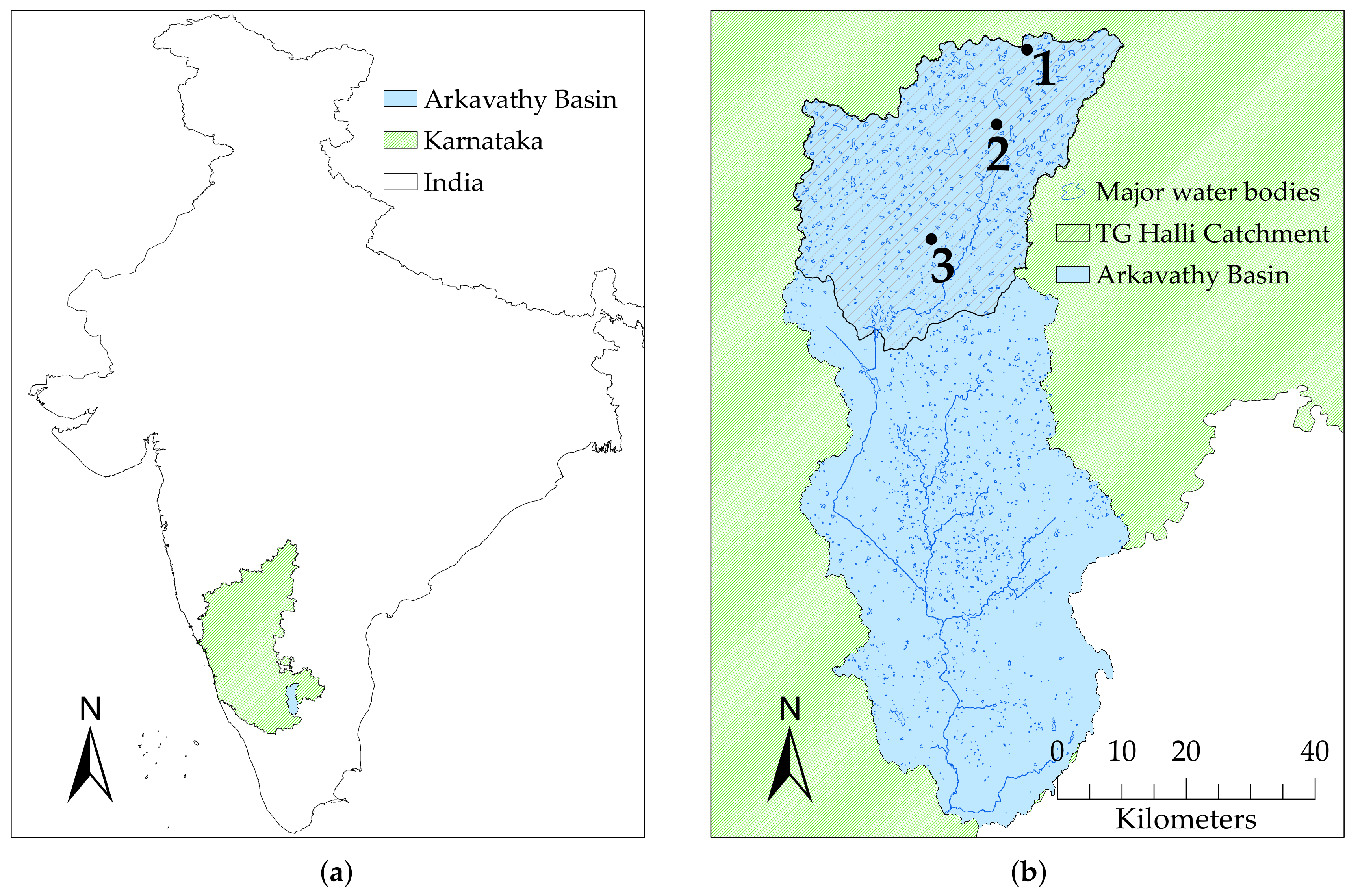
2.1. Study Sites
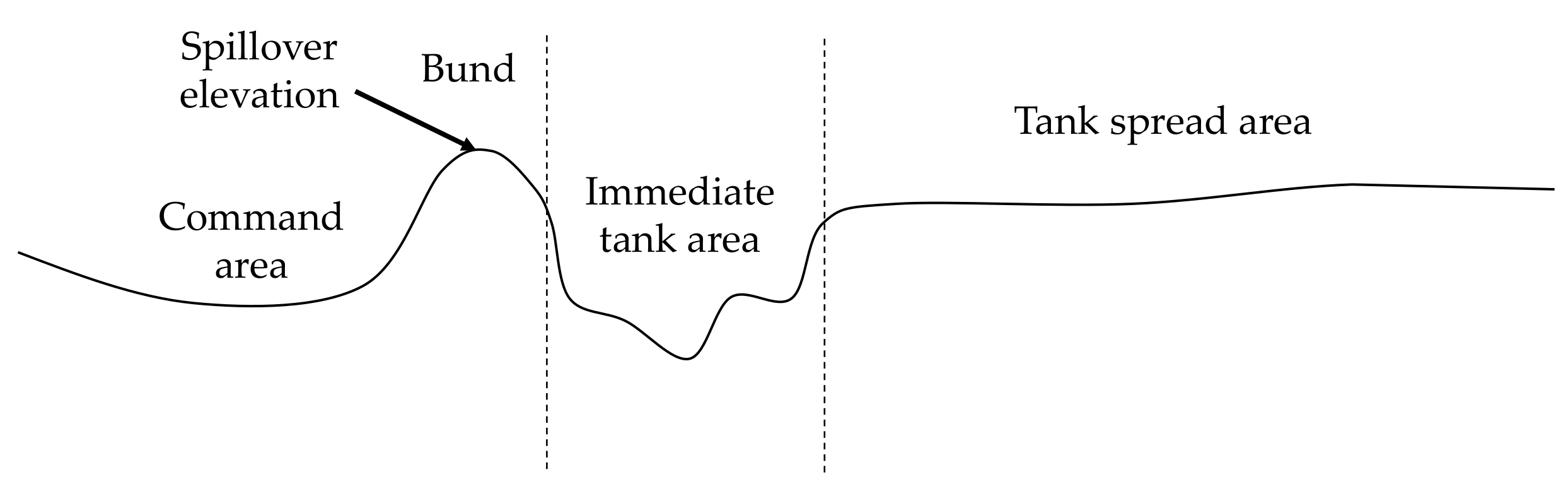
2.2. Tank Structures
2.3. Robot-Assisted Data Collection
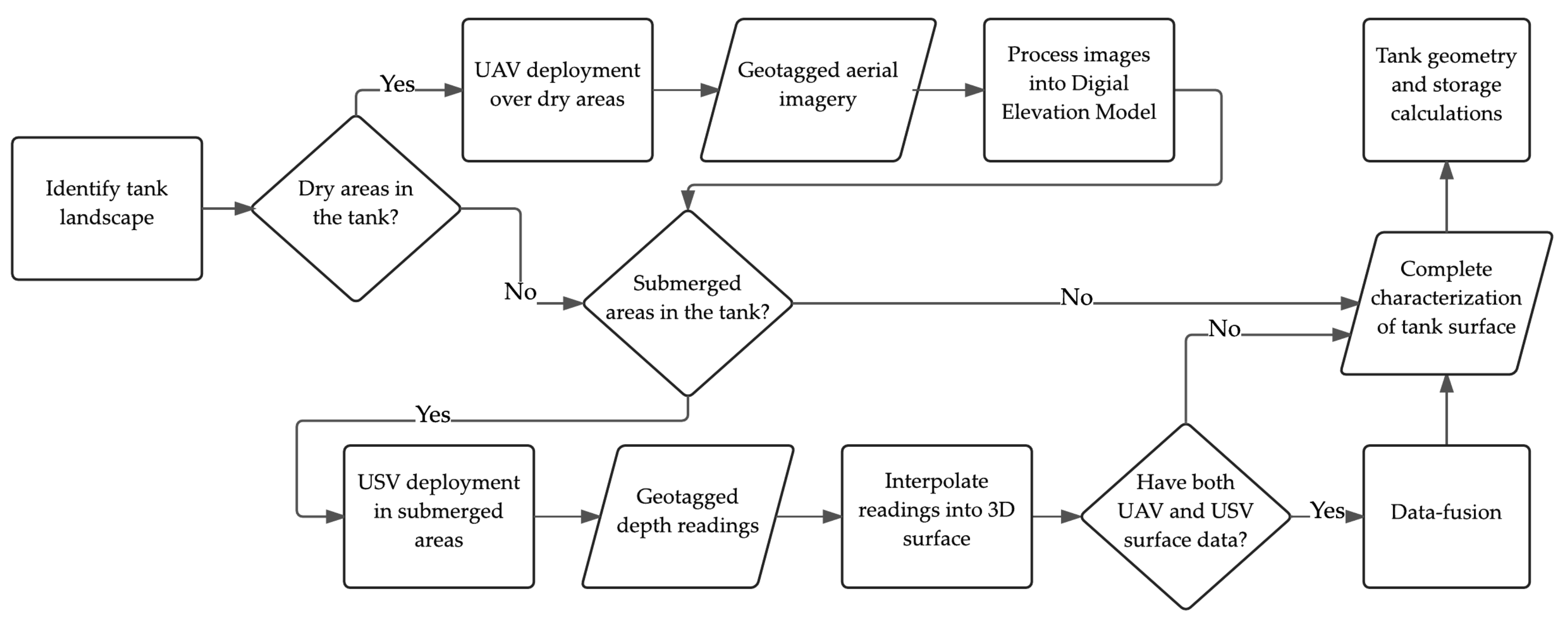
2.4. Tank Data-Fusion Processing and Calculations
2.5. Validation of Topographic and Bathymetric Measurements
3. Field Investigations
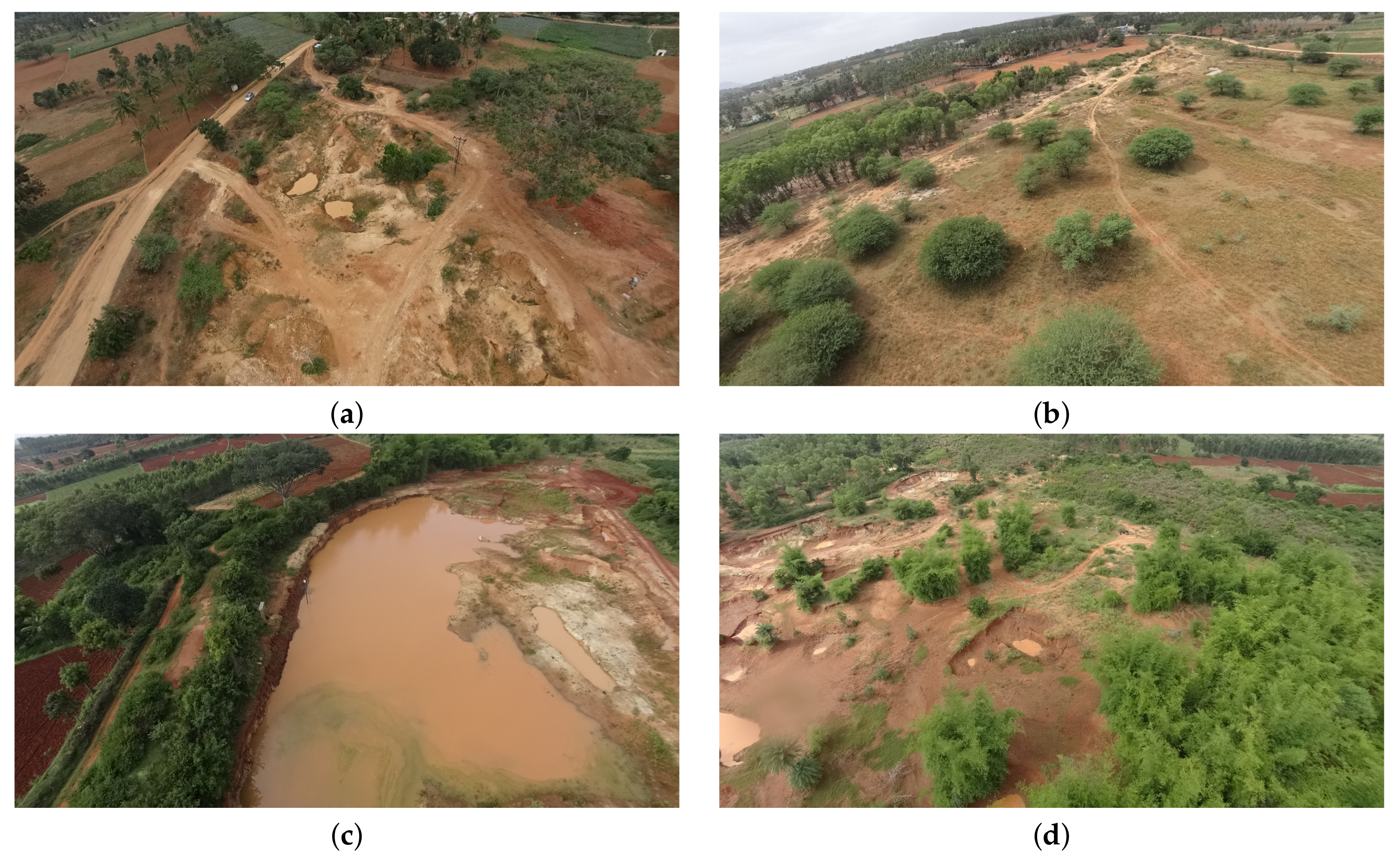
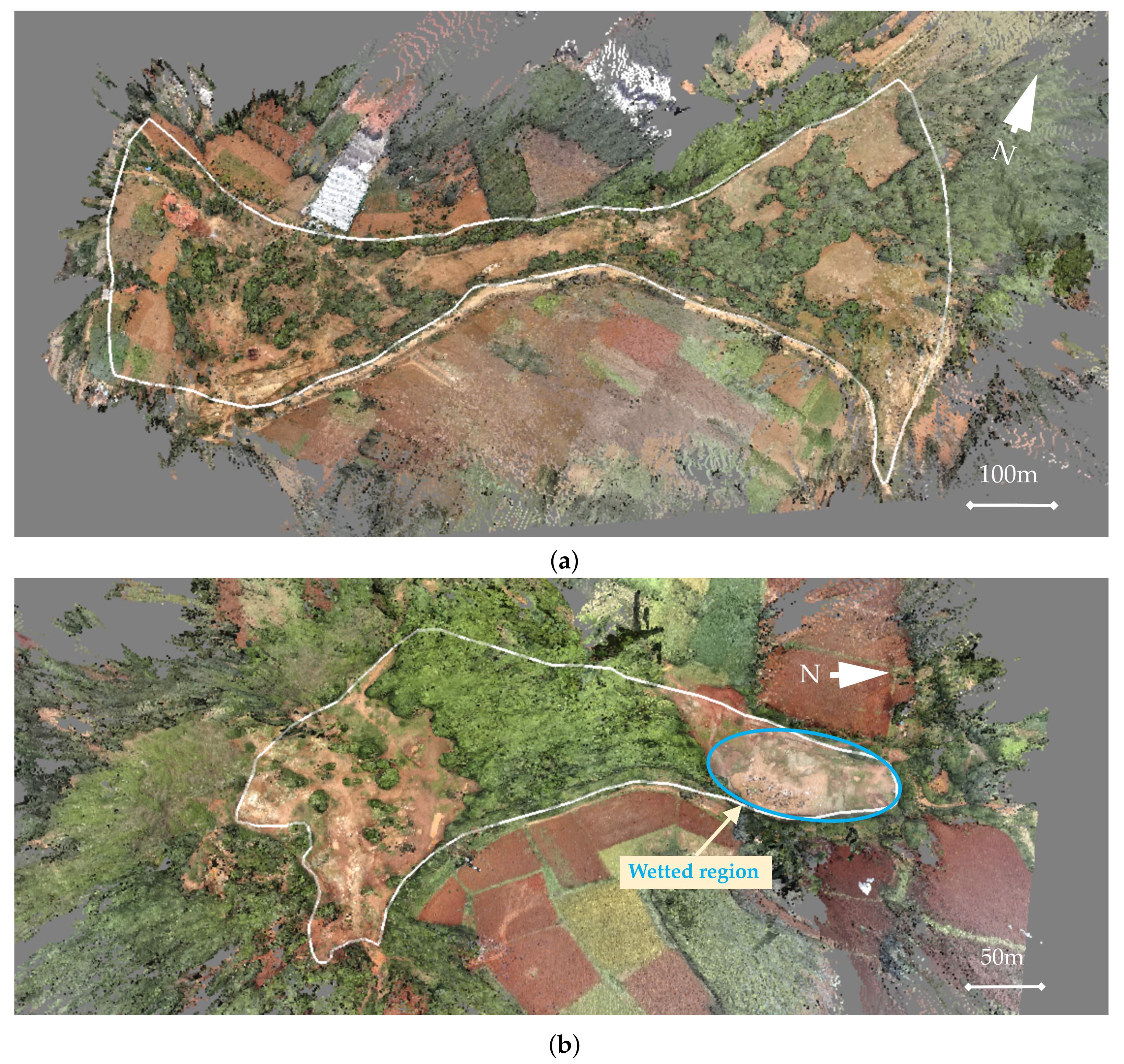
3.1. UAV Deployments
3.2. USV Deployments
4. Results and Analyses
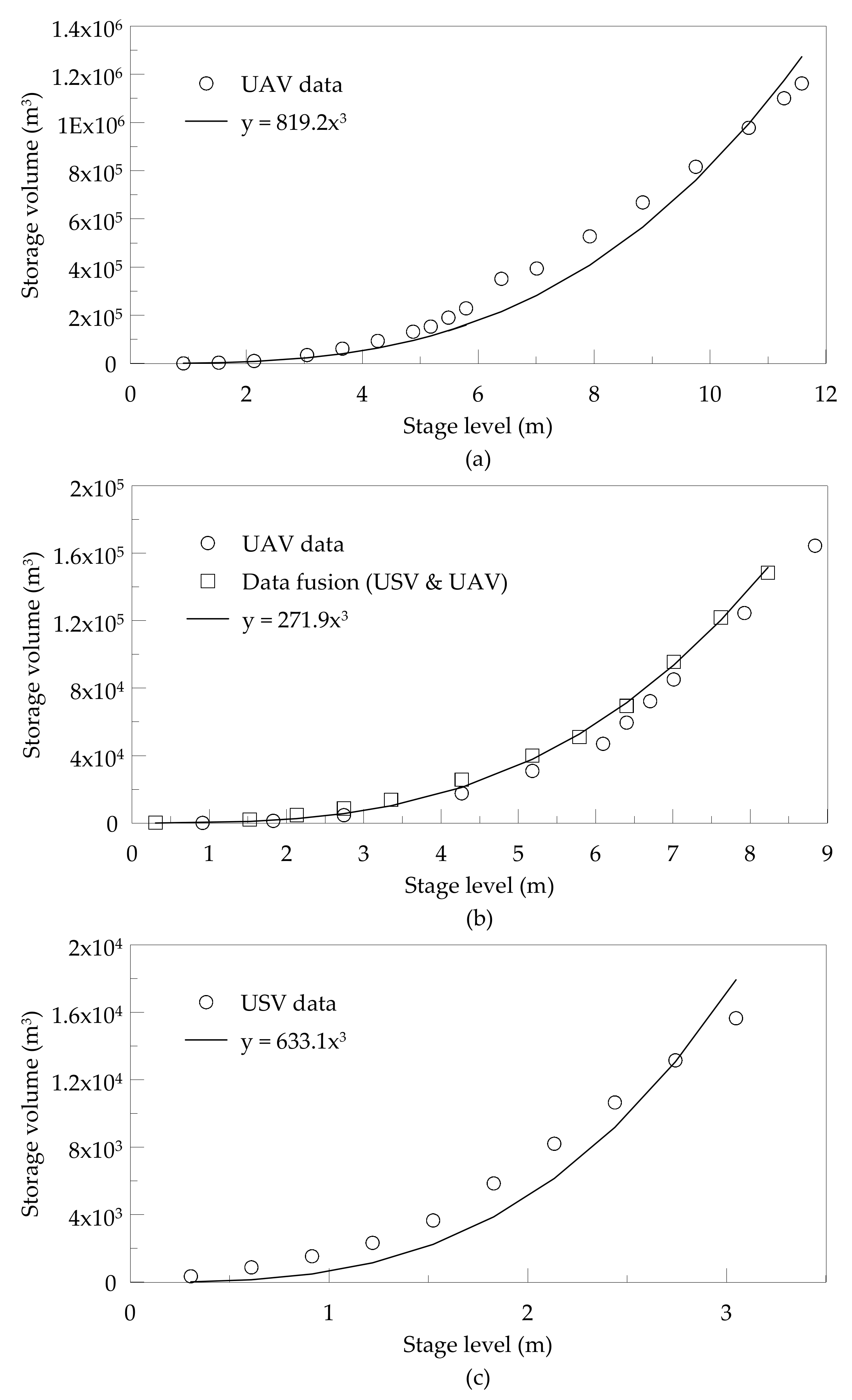
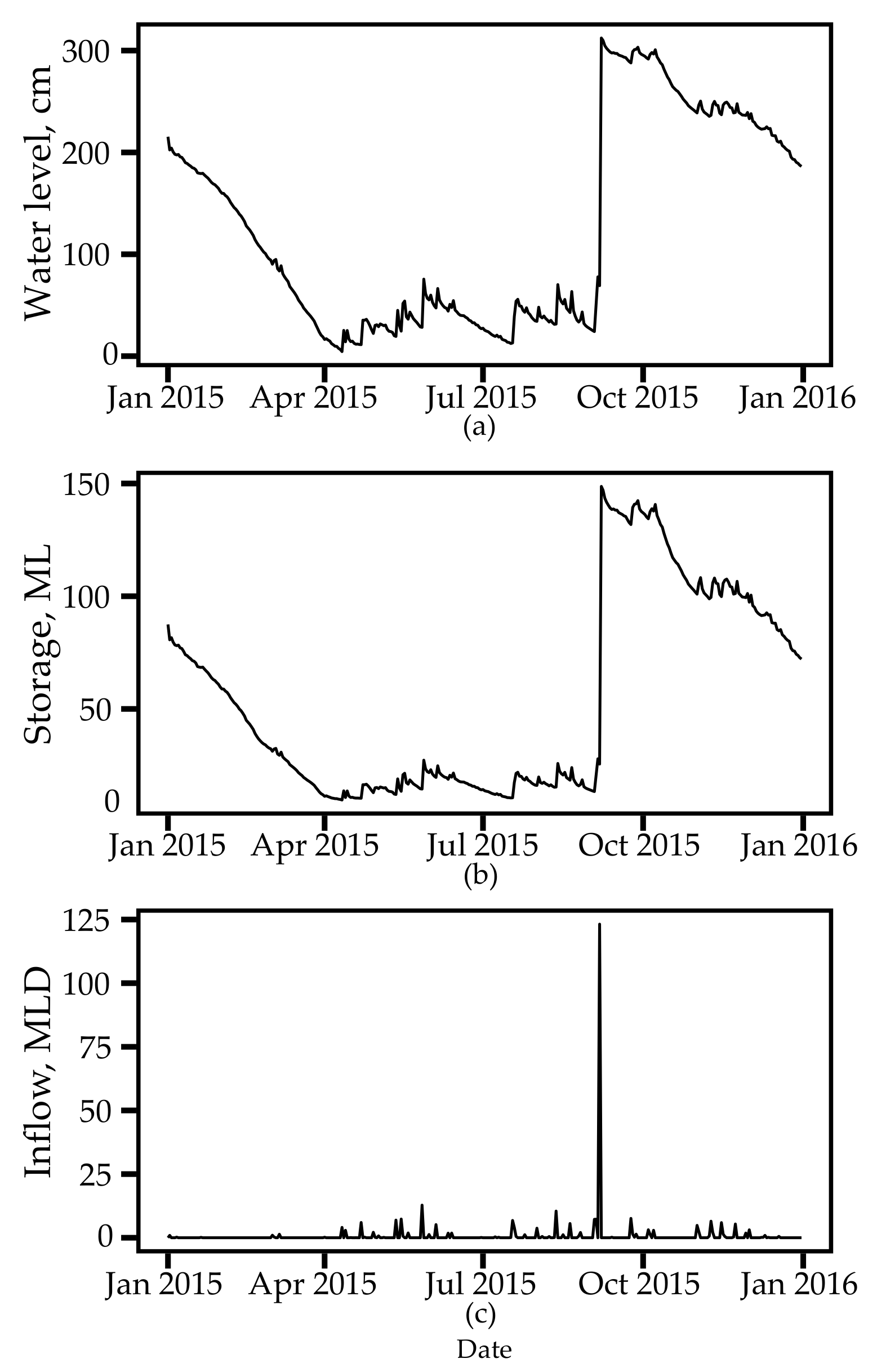
4.1. Tank Stage-Storage Relationship
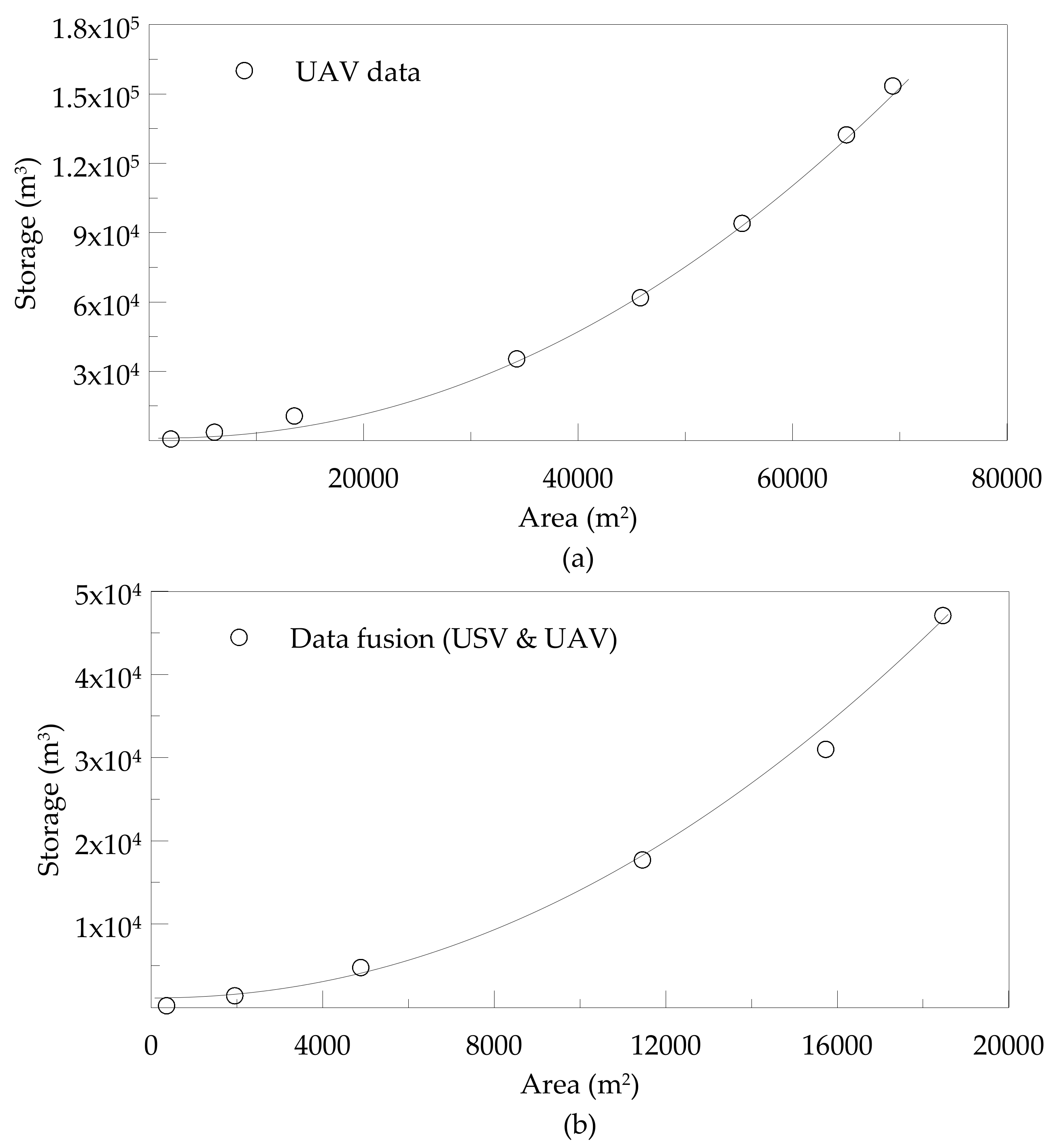
4.2. Area-Storage Relationship
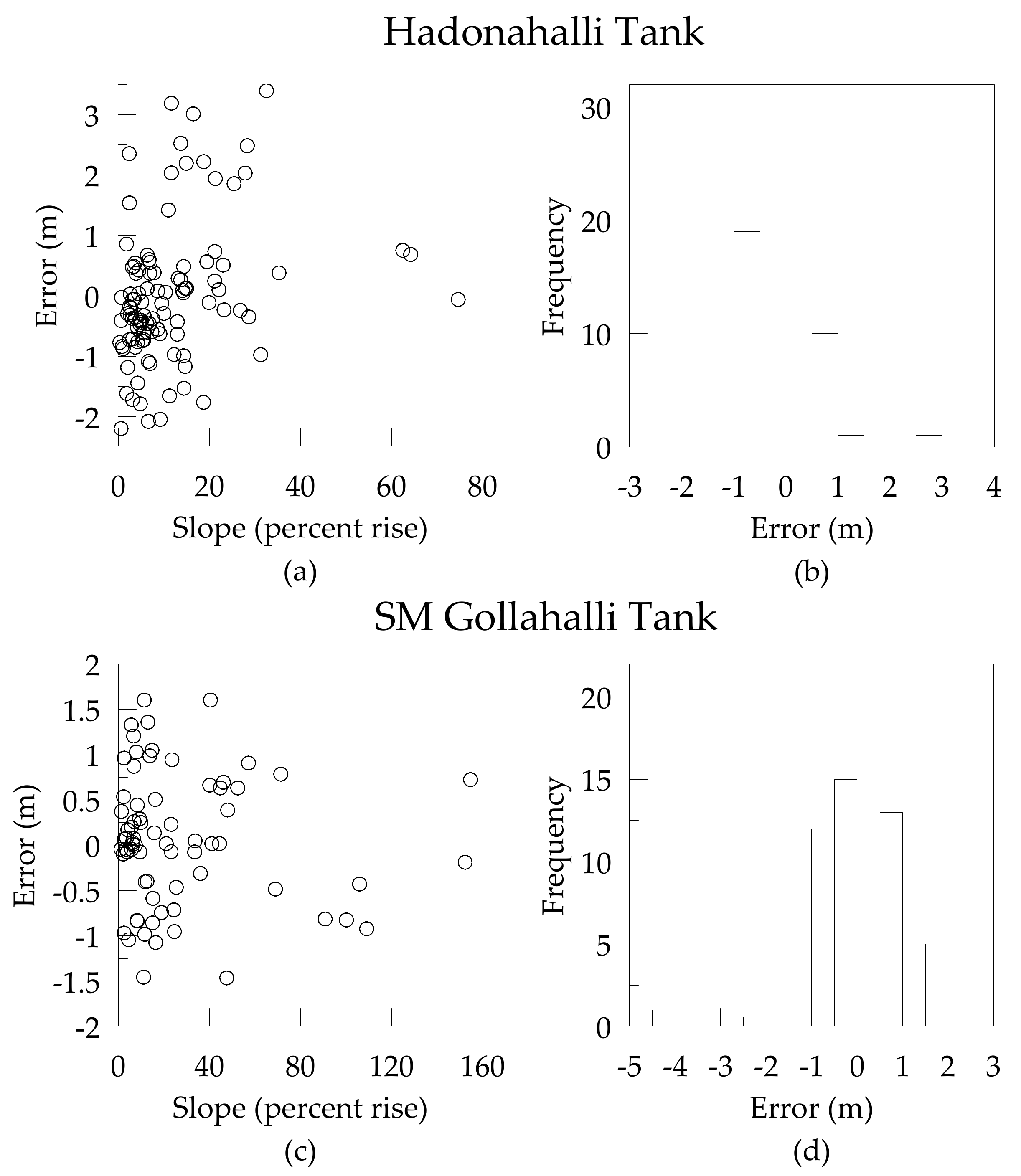
4.3. Validation of Robot-Assisted Measurements
5. Discussion
5.1. Viability of Small Robots for Surface Data Collection
5.2. Informing Hydrologic Analyses in the Arkavathy Basin
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Srinivasan, V.; Thompson, S.; Madhyastha, K.; Penny, G.; Jeremiah, K.; Lele, S. Why is the Arkavathy River drying? A multiple-hypothesis approach in a data-scarce region. Hydrol. Earth Syst. Sci. 2015, 19, 1905–1917. [Google Scholar] [CrossRef]
- Beniston, M.; Stoffel, M.; Harding, R.; Kernan, M.; Ludwig, R.; Moors, E.; Samuels, P.; Tockner, K. Obstacles to data access for research related to climate and water: Implications for science and EU policy-making. Environ. Sci. Policy 2012, 17, 41–48. [Google Scholar] [CrossRef]
- Thompson, S.; Sivapalan, M.; Harman, C.J.; Srinivasan, V.; Hipsey, M.; Reed, P.; Montanari, A.; Blöschl, G. Developing predictive insight into changing water systems: Use-inspired hydrologic science for the Anthropocene. Hydrol. Earth Syst. Sci. 2013, 17, 5013–5039. [Google Scholar] [CrossRef]
- Sivapalan, M.; Savenije, H.H.G.; Blöschl, G. Socio–hydrology: A new science of people and water. Hydrol. Process. 2012, 26, 1270–1276. [Google Scholar] [CrossRef]
- Roy, H.E.; Pocock, M.J.; Preston, C.D.; Roy, D.B.; Savage, J.; Tweddle, J.; Robinson, L. Understanding Citizen Science and Environmental Monitoring: Final Report on Behalf of UK Environmental Observation Framework; NERC/Centre for Ecology & Hydrology: Swindon, UK, 2012. [Google Scholar]
- Ping, J.T.K.; Ling, A.E.; Quan, T.J.; Dat, C.Y. Generic unmanned aerial vehicle (UAV) for civilian application-A feasibility assessment and market survey on civilian application for aerial imaging. In Proceedings of the 2012 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology, Kuala Lumpur, Malaysia, 6–9 October 2012; pp. 289–294. [Google Scholar]
- Peschel, J.; Murphy, R. On the human-machine interaction of unmanned aerial system mission Specialists. IEEE Trans. Hum.-Mach. Syst. 2013, 43, 53–62. [Google Scholar] [CrossRef]
- Mancini, A.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G.; Graham, D.J.; Labadz, J.C. The potential of small unmanned aircraft systems and structure-from-motion for topographic surveys: A test of emerging integrated approaches at Cwm Idwal, North Wales. Geomorphology 2014, 226, 35–43. [Google Scholar] [CrossRef]
- Flynn, K.; Chapra, S. Remote sensing of submerged aquatic vegetation in a shallow non-turbid river using an unmanned aerial vehicle. Remote Sens. 2014, 6, 12815–12836. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; Castro, A.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Salami, E.; Barrado, C.; Pastor, E. UAV flight experiments applied to the remote sensing of vegetated areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef]
- Goodrich, M.A.; Morse, B.S.; Engh, C.; Cooper, J.L.; Adams, J.A. Towards using unmanned aerial vehicles (UAVs) in wilderness search and rescue: Lessons from field trials. Interact. Stud. 2009, 10, 453–478. [Google Scholar]
- Tauro, F.; Porfiri, M.; Grimaldi, S. Surface flow measurements from drones. J. Hydrol. 2016, 540, 240–245. [Google Scholar] [CrossRef]
- Warner, T.; Nellis, D.; Foody, G. Optical Sensor Technology. In The SAGE Handbook of Remote Sensing; SAGE: Thousand Oaks, CA, USA, 2009; pp. 95–107. [Google Scholar]
- Harriott, C.E.; Adams, J.A. Modeling human performance for human–robot systems. Rev. Hum. Factors Ergon. 2013, 9, 94–130. [Google Scholar] [CrossRef]
- DeBell, L.; Anderson, K.; Brazier, R.E.; King, N.; Jones, L. Water resource management at catchment scales using lightweight UAVs: Current capabilities and future perspectives. J. Unmanned Veh. Syst. 2015, 4, 7–30. [Google Scholar] [CrossRef]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Notebaert, B.; Verstraeten, G.; Govers, G.; Poesen, J. Qualitative and quantitative applications of LiDAR imagery in fluvial geomorphology. Earth Surf. Process. Landf. 2009, 34, 217–231. [Google Scholar] [CrossRef]
- Kitts, C.; Mahacek, P.; Adamek, T.; Rasal, K.; Howard, V.; Li, S.; Badaoui, A.; Kirkwood, W.; Wheat, G.; Hulme, S. Field operation of a robotic small waterplane area twin hull boat for shallow-water bathymetric characterization. J. Field Robot. 2012, 29, 924–938. [Google Scholar] [CrossRef]
- Vaneck, T.W.; Rodriguez-Ortiz, C.D.; Schmidt, M.C.; Manley, J.E. Automated bathymetry using an autonomous surface craft. Navigation 1997, 43, 407–418. [Google Scholar] [CrossRef]
- Yaakob, O.; Mohamed, Z.; Hanafiah, M.S.; Suprayogi, D.; Abdul Ghani, M.; Adnan, F.; Mukti, M.; Din, J. Development of unmanned surface vehicle (USV) for sea patrol and environmental monitoring. In Proceedings of the International Conference on Marine Technology, Kuala Terengganu, Malaysia, 20–22 October 2012. [Google Scholar]
- Casper, A.F.; Hall, M.L.; Dixon, B.; Steimle, E.T. Combining data collection from unmanned surface vehicles with geospatial analysis: Tools for improving surface water sampling, monitoring, and assessment. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6. [Google Scholar]
- Legleiter, C.J. Remote measurement of river morphology via fusion of LiDAR topography and spectrally based bathymetry. Earth Surf. Process. Landf. 2012, 37, 499–518. [Google Scholar] [CrossRef]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Seamless mapping of river channels at high resolution using mobile LiDAR and UAV-photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec, QC, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar]
- The Navy Unmanned Surface Vehicle (USV) Master Plan; Technical Report; United States Department of the Navy: Washington, DC, USA, 2007.
- Penny, G.; Srinivasan, V.; Dronova, I.; Lele, S.; Thompson, S. Spatial characterization of long-term hydrological change in the Arkavathy watershed adjacent to Bangalore, India. Hydrol. Earth Syst. Sci. Discuss. 2016. [Google Scholar] [CrossRef]
- Reduced Inflow into Tippagondanahalli Reservoir (TGR): A Remote Sensing Based Evaluation; Technical Report; ISRO (Indian Space Research Organization) IN-RIMT (Indian Resources Information & Management Technologies Pvt. Ltd): Bangalore, India, 2000.
- Van Meter, K.J.; Basu, N.B.; Tate, E.; Wyckoff, J. Monsoon harvests: The living legacies of rainwater harvesting systems in South India. Environ. Sci. Technol. 2014, 48, 4217–4225. [Google Scholar] [CrossRef] [PubMed]
- Van Meter, K.J.; Steiff, M.; McLaughlin, D.L.; Basu, N.B. The socioecohydrology of rainwater harvesting in India: Understanding water storage and release dynamics across spatial scales. Hydrol. Earth Syst. Sci. 2016, 20, 2629–2647. [Google Scholar] [CrossRef]
- Lele, S.; Srinivasan, V.; Jamwal, P.; Thomas, B.K.; Eswar, M.; Zuhail, T.M. Water Management in Arkavathy Basin: A Situation Analysis; Ashoka Trust for Research in Ecology and the Environment: Bangalore, India, 2013. [Google Scholar]
- Kršák, B.; Blištan, P.; Pauliková, A.; Puškárová, P.; Kovanic, L.; Palková, J.; Zeliznaková, V. Use of low-cost UAV photogrammetry to analyze the accuracy of a digital elevation model in a case study. Measurement 2016, 91, 276–287. [Google Scholar] [CrossRef]
- Hsieh, Y.C.; Chan, Y.C.; Hu, J.C. Digital elevation model differencing and error estimation from multiple sources: A case study from the Meiyuan Shan Landslide in Taiwan. Remote Sens. 2016, 8, 199. [Google Scholar] [CrossRef]
- Agisoft PhotoScan User Manual: Professional Edition; Version 1.2; Agisoft LLC: St. Petersburg, Russia, 2016.
- Childs, C. Interpolating surfaces in ArcGIS spatial analyst. ArcUser 2004, 3235, 32–35. [Google Scholar]
- Peschel, J. Mission Specialist Human-Robot Interaction in Micro Unmanned Aerial Systems. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2012. [Google Scholar]
- Murphy, R.; Pratt, K.; Burke, J. Crew roles and operational protocols for rotary-wing micro-UAVs in close urban environments. In Proceedings of the Third ACM/IEEE International Conference on Human-Robot Interaction, Amsterdam, The Netherlands, 12–15 March 2008; pp. 73–80. [Google Scholar]
- Amorocho, J. Measures of the linearity of hydrologic systems. J. Geophys. Res. 1963, 68, 2237–2249. [Google Scholar] [CrossRef]
- Brutsaert, W. Water on the land surface: Fluid mechanics of free surface flow. In Hydrology: An Introduction; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Moore, R. Storage-outflow modelling of streamflow recessions, with application to a shallow-soil forested catchment. J. Hydrol. 1997, 198, 260–270. [Google Scholar] [CrossRef]
- Sawunyama, T.; Senzanje, A.; Mhizha, A. Estimation of small reservoir storage capacities in Limpopo River Basin using geographical information systems (GIS) and remotely sensed surface areas: Case of Mzingwane catchment. Phys. Chem. Earth 2006, 31, 935–943. [Google Scholar] [CrossRef]
- Wittenberg, H. Baseflow recession and recharge as nonlinear storage processes. Hydrol. Process. 1999, 13, 715–726. [Google Scholar] [CrossRef]
- Botter, G.; Porporato, A.; Rodriguez-Iturbe, I.; Rinaldo, A. Nonlinear storage–discharge relations and catchment streamflow regimes. Water Resour. Res. 2009, 45. [Google Scholar] [CrossRef]
- Liebe, J. Estimation of Water Storage Capacity and Evaporation Losses of Small Reservoirs in the Upper East Region of Ghana. Ph.D. Thesis, Bonn University, Bonn, Germany, 2002. [Google Scholar]
- Meigh, J. The impact of small farm reservoirs on urban water supplies in Botswana. Nat. Resour. Forum 1995, 19, 71–83. [Google Scholar] [CrossRef]
- Théau, J. Temporal resolution. In Encyclopedia of GIS; Springer International Publishing: Cham, Switzerland, 2008; pp. 1150–1151. [Google Scholar]
- US Army Corps of Engineers. Chapter 2: Overview of topographic surveying techniques and methods. In Control and Topographic Surveying Engineer Manual; Department of the Army: Washington, DC, USA, 2007; pp. 1–38. [Google Scholar]
- Crocker, I.; Maslanik, J.A.; Adler, J.J.; Palo, S.E.; Herzfeld, U.C.; Emery, W.J. A sensor package for ice surface observations using small unmanned aircraft systems. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1033–1047. [Google Scholar] [CrossRef]
- Pires, A.; Chaminé, H.I.; Nunes, J.C.; Borges, P.A.; Garcia, A.; Sarmento, E.; Antunes, M.; Salvado, F.; Rocha, F. New mapping techniques on coastal volcanic rock platforms using UAV LiDAR surveys in Pico Island, Azores (Portugal). In Volcanic Rocks and Soils; CRC Press: Boca Raton, FL, USA, 2015; pp. 385–388. [Google Scholar]
- Glendenning, C.J.; Vervoort, R. Rainwater Harvesting—A Supply-Side Management Tool for Sustaining Groundwater in India. In Sustainable Water Use and Management; Green Energy and Technology, Springer International Publishing: Cham, Switzerland, 2014; pp. 313–337. [Google Scholar]
- Palanisami, K.; Meinzen-Dick, R.; Giordano, M. Climate change and water supplies: Options for sustaining tank irrigation potential in India. Econ. Political Wkly. 2010, 45, 183–190. [Google Scholar]
- Perrin, J.; Ferrant, S.; Massuel, S.; Dewandel, B.; Maréchal, J.C.; Aulong, S.; Ahmed, S. Assessing water availability in a semi-arid watershed of southern India using a semi-distributed model. J. Hydrol. 2012, 460, 143–155. [Google Scholar] [CrossRef]
- Rodrigues, L.; Sano, E.E.; Steenhuis, T.S.; Passo, D.P. Estimation of small reservoir storage capacities with remote sensing in the Brazilian Savannah Region. Water Resour. Manag. 2012, 26, 873–882. [Google Scholar] [CrossRef]
- D’Souza, R. Water in British India: The making of a “colonial hydrology”. Hist. Compass 2006, 4, 621–629. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Date | Time | Duration | Altitude | Usable Images Collected |
|---|---|---|---|---|---|
| 66emHadonahalli | 14 July 2015 | 08:44 a.m. | 11 min | 50 m | 244 |
| 14 July 2015 | 09:19 a.m. | 10 min | 45 m | 214 | |
| 14 July 2015 | 09:52 a.m. | 10 min | 35 m | 218 | |
| 14 July 2015 | 10:20 a.m. | 10 min | 40 m | 204 | |
| 14 July 2015 | 10:40 a.m. | 6 min | 40 m | 124 | |
| 14 July 2015 | 11:00 a.m. | 5 min | 40 m | 118 | |
| 56emSM Gollahalli | 3 July 2015 | 08:16 a.m. | 14 min | 30 m | 268 |
| 3 July 2015 | 08:33 a.m. | 15 min | 40 m | 182 | |
| 3 July 2015 | 05:59 a.m. | 10 min | 40 m | 186 | |
| 3 July 2015 | 09:13 a.m. | 9 min | 40 m | 178 | |
| 3 July 2015 | 09:25 a.m. | 10 min | 40 m | 213 |
| Tank | ||
|---|---|---|
| Hadonahalli | 0.997 | |
| SM Gollahalli | 0.994 |
| Site | Mean Absolute Error | Standard Deviation | RMSE | Volume Estimation Error |
|---|---|---|---|---|
| Hadonahalli | 0.833 m | 0.771 m | 1.13 m | 14.5% |
| SM Gollahalli | 0.617 m | 0.601 m | 0.862 m | 14.9% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Young, S.; Peschel, J.; Penny, G.; Thompson, S.; Srinivasan, V. Robot-Assisted Measurement for Hydrologic Understanding in Data Sparse Regions. Water 2017, 9, 494. https://doi.org/10.3390/w9070494
Young S, Peschel J, Penny G, Thompson S, Srinivasan V. Robot-Assisted Measurement for Hydrologic Understanding in Data Sparse Regions. Water. 2017; 9(7):494. https://doi.org/10.3390/w9070494
Chicago/Turabian StyleYoung, Sierra, Joshua Peschel, Gopal Penny, Sally Thompson, and Veena Srinivasan. 2017. "Robot-Assisted Measurement for Hydrologic Understanding in Data Sparse Regions" Water 9, no. 7: 494. https://doi.org/10.3390/w9070494
APA StyleYoung, S., Peschel, J., Penny, G., Thompson, S., & Srinivasan, V. (2017). Robot-Assisted Measurement for Hydrologic Understanding in Data Sparse Regions. Water, 9(7), 494. https://doi.org/10.3390/w9070494