

Sample Size Optimization for Digital Soil Mapping: An Empirical Example
 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Conceptual Workflow
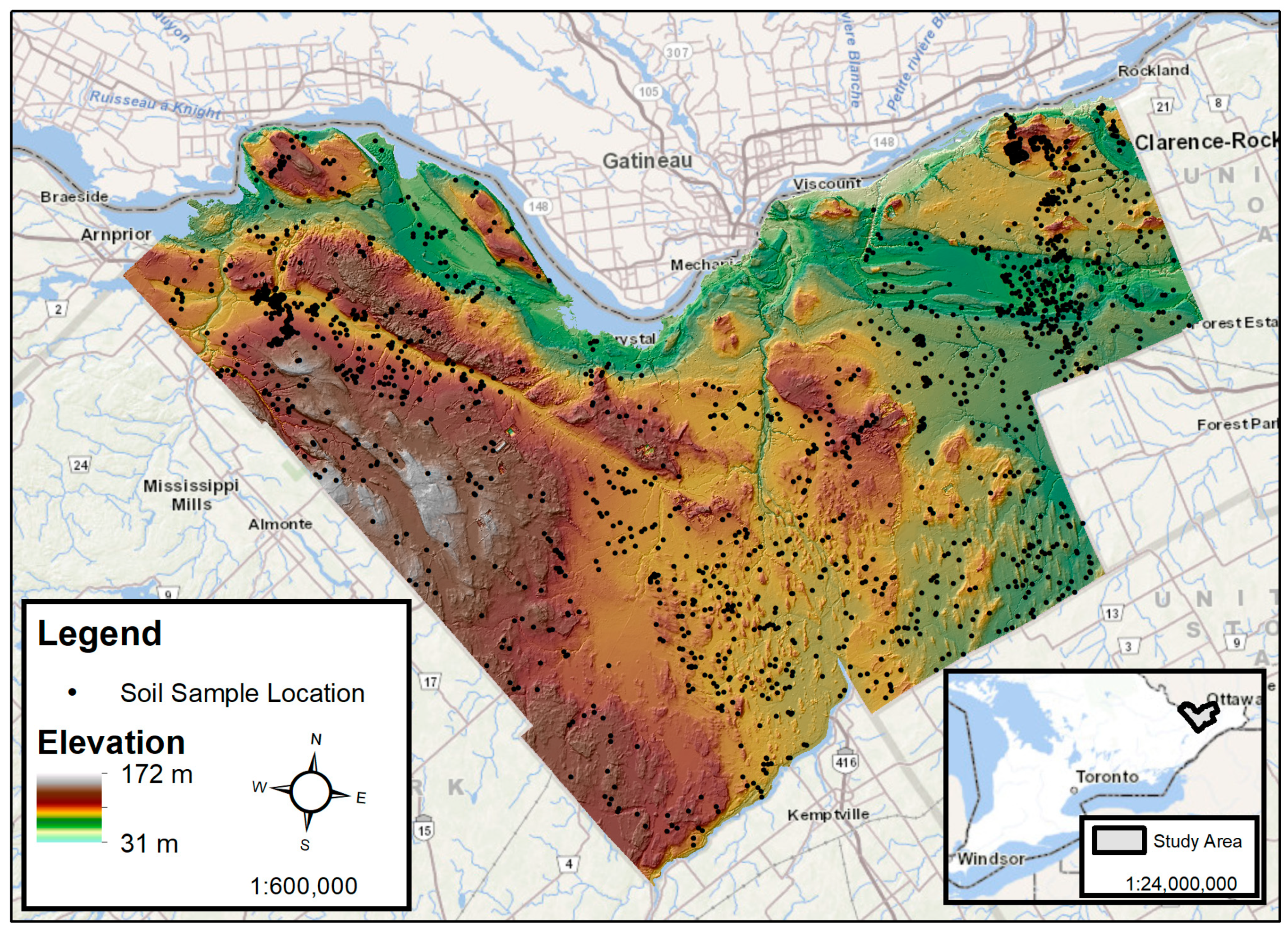
2.2. Study Area, Sample Locations, and Soil Properties
2.3. Environmental Covariates
2.4. Kriging
2.5. Sample Plans and Divergence Metrics
2.6. Predictive Modeling
2.7. Optimal Calibration Sample Size
3. Results and Discussion
3.1. Soil Properties and Kriged Surfaces
3.2. Optimal Sample Size—Divergence Metrics
3.3. Optimal Sample Size—Learning Curves
3.4. Optimal Sample Size—Overall
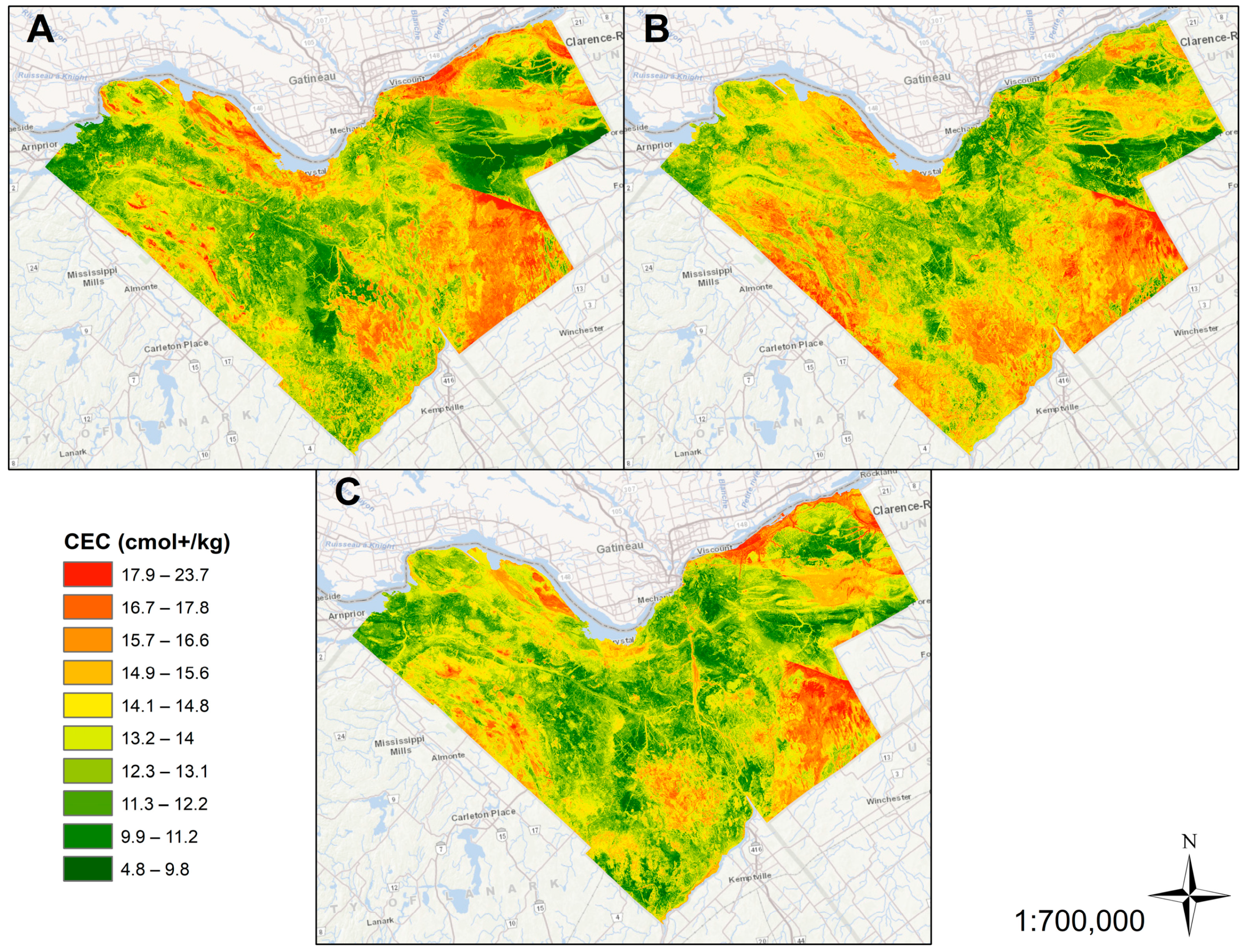
3.5. Final Random Forest Predictions and Uncertainty
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mapping Systems Working Group. A Soil Mapping System for Canada: Revised.; Land Resource Research Institute, Research Branch, Agriculture Canada: Ottawa, ON, Canada, 1981; p. 94. [Google Scholar]
- Expert Committee on Soil Survey. Soil Survey Handook; Coen, G.M., Ed.; Land Resource Research Centre, Research Branch, Agriculture Canada: Ottawa, ON, Canada, 1987; Volume 1, ISBN 0-662-15374-X. [Google Scholar]
- Saurette, D.D.; Heck, R.J.; Gillespie, A.W.; Berg, A.A.; Biswas, A. Divergence Metrics for Determining Optimal Training Sample Size in Digital Soil Mapping. Geoderma 2023, 436, 116553. [Google Scholar] [CrossRef]
- Wadoux, A.M.J.-C.; Minasny, B.; McBratney, A.B. Machine Learning for Digital Soil Mapping: Applications, Challenges and Suggested Solutions. Earth-Sci. Rev. 2020, 210, 103359. [Google Scholar] [CrossRef]
- Minasny, B.; McBratney, A.B. A Conditioned Latin Hypercube Method for Sampling in the Presence of Ancillary Information. Comput. Geosci. 2006, 32, 1378–1388. [Google Scholar] [CrossRef]
- Brus, D.J. Sampling for Digital Soil Mapping: A Tutorial Supported by R Scripts. Geoderma 2019, 338, 464–480. [Google Scholar] [CrossRef]
- Biswas, A.; Zhang, Y. Sampling Designs for Validating Digital Soil Maps: A Review. Pedosphere 2018, 28, 1–15. [Google Scholar] [CrossRef]
- Tiedeman, K.; Chamberlin, J.; Kosmowski, F.; Ayalew, H.; Sida, T.; Hijmans, R.J. Field Data Collection Methods Strongly Affect Satellite-Based Crop Yield Estimation. Remote Sens. 2022, 14, 1995. [Google Scholar] [CrossRef]
- Jeong, J.H.; Resop, J.P.; Mueller, N.D.; Fleisher, D.H.; Yun, K.; Butler, E.E.; Timlin, D.J.; Shim, K.-M.; Gerber, J.S.; Reddy, V.R.; et al. Random Forests for Global and Regional Crop Yield Predictions. PLoS ONE 2016, 11, e0156571. [Google Scholar] [CrossRef]
- Castro-Franco, M.; Costa, J.L.; Peralta, N.; Aparicio, V. Prediction of Soil Properties at Farm Scale Using a Model-Based Soil Sampling Scheme and Random Forest. Soil Sci. 2015, 180, 74–85. [Google Scholar] [CrossRef]
- Saurette, D.D.; Berg, A.A.; Laamrani, A.; Heck, R.J.; Gillespie, A.W.; Voroney, P.; Biswas, A. Effects of Sample Size and Covariate Resolution on Field-Scale Predictive Digital Mapping of Soil Carbon. Geoderma 2022, 425, 116054. [Google Scholar] [CrossRef]
- Schmidinger, J.; Schröter, I.; Bönecke, E.; Gebbers, R.; Ruehlmann, J.; Kramer, E.; Mulder, V.L.; Heuvelink, G.B.M.; Vogel, S. Effect of Training Sample Size, Sampling Design and Prediction Model on Soil Mapping with Proximal Sensing Data for Precision Liming. Precis. Agric. 2024. [Google Scholar] [CrossRef]
- Whelan, B.M.; McBratney, A.B.; Viscarra Rossel, R.A. Spatial Prediction for Precision Agriculture. In Proceedings of the Third International Conference on Precision Agriculture, Minneapolis, MN, USA, 23–26 June 1996; ASA, CSSA, and SSSA Books. pp. 331–342, ISBN 978-0-89118-257-3. [Google Scholar]
- Bouasria, A.; Bouslihim, Y.; Gupta, S.; Taghizadeh-Mehrjardi, R.; Hengl, T. Predictive Performance of Machine Learning Model with Varying Sampling Designs, Sample Sizes, and Spatial Extents. Ecol. Inform. 2023, 78, 102294. [Google Scholar] [CrossRef]
- Wisz, M.S.; Hijmans, R.J.; Li, J.; Peterson, A.T.; Graham, C.H.; Guisan, A.; NCEAS Predicting Species Distributions Working Group. Effects of Sample Size on the Performance of Species Distribution Models. Divers. Distrib. 2008, 14, 763–773. [Google Scholar] [CrossRef]
- Ng, W.; Minasny, B.; Malone, B.; Filippi, P. In Search of an Optimum Sampling Algorithm for Prediction of Soil Properties from Infrared Spectra. PeerJ 2018, 6, 5722. [Google Scholar] [CrossRef]
- Ng, W.; Minasny, B.; Mendes, W.D.S.; Demattê, J.A.M. The Influence of Training Sample Size on the Accuracy of Deep Learning Models for the Prediction of Soil Properties with Near-Infrared Spectroscopy Data. SOIL 2020, 6, 565–578. [Google Scholar] [CrossRef]
- Chen, S.; Arrouays, D.; Leatitia Mulder, V.; Poggio, L.; Minasny, B.; Roudier, P.; Libohova, Z.; Lagacherie, P.; Shi, Z.; Hannam, J.; et al. Digital Mapping of GlobalSoilMap Soil Properties at a Broad Scale: A Review. Geoderma 2022, 409, 115567. [Google Scholar] [CrossRef]
- Malone, B.P.; Minansy, B.; Brungard, C. Some Methods to Improve the Utility of Conditioned Latin Hypercube Sampling. PeerJ 2019, 7, e6451. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.; Aitkenhead, M.; Stark, C.R.; Ehsan Jorat, M. Optimal Sampling Using Conditioned Latin Hypercube for Digital Soil Mapping: An Approach Using Bhattacharyya Distance. Geoderma 2023, 439, 116660. [Google Scholar] [CrossRef]
- Stumpf, F.; Schmidt, K.; Behrens, T.; Schönbrodt-Stitt, S.; Buzzo, G.; Dumperth, C.; Wadoux, A.; Xiang, W.; Scholten, T. Incorporating Limited Field Operability and Legacy Soil Samples in a Hypercube Sampling Design for Digital Soil Mapping. J. Plant Nutr. Soil Sci. 2016, 179, 499–509. [Google Scholar] [CrossRef]
- Brungard, C.W.; Boettinger, J.L. Conditioned Latin Hypercube Sampling: Optimal Sample Size for Digital Soil Mapping of Arid Rangelands in Utah, USA. In Digital Soil Mapping: Bridging Research, Environmental Application, and Operation; Boettinger, J.L., Howell, D.W., Moore, A.C., Hartemink, A.E., Kienast-Brown, S., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 67–75. ISBN 978-90-481-8863-5. [Google Scholar]
- Garrido, A. About Some Properties of the Kullback-Leibler Divergence. Adv. Model. Optim. 2009, 11, 8. [Google Scholar]
- McBratney, A.; Mendonça Santos, M.L.; Minasny, B. On Digital Soil Mapping. Geoderma 2003, 117, 3–52. [Google Scholar] [CrossRef]
- Schut, L.W.; Wilson, E.A. The Soils of the Regional Municipality of Ottawa-Carleton; Ontario Institute of Pedology, Research Branch, Agriculture and Agri-Food Canada, Ontario Ministry of Agriculture and Food, Department of Land Resource Science, University of Guelph: Guelph, ON, Canada, 1987; p. 118. [Google Scholar]
- Bélanger, J.R.; Moore, A.; Prégent, A.; Richard, H. Surficial Geology—Ottawa, Ontario-Quebec (31G/5); Geological Survey of Canada: Ottawa, ON, Canada, 1995. [Google Scholar]
- MacDonald, G.; Harrison, J.E. Generalized Bedrock Geology, Ottawa-Hull, Ontario and Quebec; Government of Canada: Matane, QC, Canada, 1979. [Google Scholar]
- Sheldrick, B.H.; Wang, C. Particle Size Distribution. In Soil Sampling and Methods of Analysis; Lewis Publishers: Boca Raton, FL, USA; Canadian Society of Soil Science: Pinawa, MB, Canada, 1993; pp. 499–507. [Google Scholar]
- Rhoades, J.D. Cation Exchange Capacity. In Methods of Soil Analysis. Part 2. Chemical and Microbiological Properties; Page, A.L., Miller, R.H., Keeney, D.R., Eds.; American Society of Agronomy, Inc. Soil Science Society of America, Inc.: Madison, WI, USA, 1982; pp. 149–157. ISBN 978-0-89118-977-0. [Google Scholar]
- McKeague, J.A. (Ed.) Manual on Soil Sampling and Methods of Analysis, 2nd ed.; Subcommittee on Methods of Analysis of the Canada Soil Survey Committee, Canadian Society of Soil Science: Pinawa, MB, Canada, 1978. [Google Scholar]
- Kalembasa, S.J.; Jenkinson, D.S. A Comparative Study of Titrimetric and Gravimetric Methods for the Determination of Organic Carbon in Soil. J. Sci. Food Agric. 1973, 24, 1085–1090. [Google Scholar] [CrossRef]
- Bishop, T.F.A.; McBratney, A.B.; Laslett, G.M. Modelling Soil Attribute Depth Functions with Equal-Area Quadratic Smoothing Splines. Geoderma 1999, 91, 27–45. [Google Scholar] [CrossRef]
- Malone, B.P. Ithir: Soil Data and Some Useful Associated Functions. R Package Version 1.0. 2018. Available online: https://bitbucket.org/brendo1001/ithir/src/master/ (accessed on 15 February 2024).
- Lindsay, J. WhiteboxTools User Manual; University of Guelph: Guelph, ON, Canada, 2018; p. 234. [Google Scholar]
- Wu, Q.; Brown, A. Whitebox: “WhiteboxTools” R Frontend. R Package Version 2.2.0. 2022. Available online: https://CRAN.R-project.org/package=whitebox (accessed on 15 February 2024).
- Brenning, A.; Bangs, D.; Becker, M. RSAGA: SAGA Geoprocessing and Terrain Analysis. R Package Version 1.4.0. 2022. Available online: https://CRAN.R-project.org/package=RSAGA (accessed on 15 February 2024).
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Winchmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v.2.1.4. Geosci. Model Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef]
- Natural Resources Canada. Geoscience Data Repository for Geophysical Data. In Magnetic-Radiometric-EM Datasets; Natural Resources Canada: Ottawa, ON, Canada, 2019. [Google Scholar]
- Saurette, D.D. Onsoilsurvey: Making PDSM in Ontario Better. R package version 0.0. 0.9000. 2021. Available online: https://github.com/newdale/onsoilsurvey (accessed on 15 February 2024).
- Behrens, T.; Schmidt, K.; Rossel, R.A.V.; Gries, P.; Scholten, T.; MacMillan, R.A. Spatial Modelling with Euclidean Distance Fields and Machine Learning. Eur. J. Soil Sci. 2018, 69, 757–770. [Google Scholar] [CrossRef]
- Ontario Geological Survey. Surficial Geology of Southern Ontario. Miscellaneous Release—Data-128-REV. 2010. Available online: https://www.geologyontario.mndm.gov.on.ca/mndmfiles/pub/data/imaging/MRD128-REV//MRD128-REV_metadata.pdf? (accessed on 15 February 2024).
- Ontario Geological Survey. 1:250,000 Scale Bedrock Geology of Ontario. Miscellaneous Release—DATA 126—Revision 1. 2011. Available online: https://www.geologyontario.mndm.gov.on.ca/mndmfiles/pub/data/records/MRD126-REV1.html (accessed on 15 February 2024).
- Ontario Ministry of Agriculture, Food and Rural Affairs Ontario Soil Survey Complex. 2019. Available online: https://www.arcgis.com/home/item.html?id=a0eec61f72334bf7b4fc85d2f67456bd (accessed on 15 February 2024).
- Kuhn, M.; Johnson, K. Applied Predictive Modeling; Springer: New York, NY, USA, 2013; ISBN 978-1-4614-6848-6. [Google Scholar]
- Kuhn, M. The Caret Package. Available online: https://topepo.github.io/caret/ (accessed on 1 September 2023).
- Freeman, T.G. Calculating Catchment Area with Divergent Flow Based on a Regular Grid. Comput. Geosci. 1991, 17, 413–422. [Google Scholar] [CrossRef]
- Koethe, R.; Lehmeier, F. SARA—System Zur Automatischen Relief-Analyse, User Manual, 2nd ed.; University of Goettingen: Göttingen, Germany, 1996. [Google Scholar]
- Zevenbergen, L.W.; Thorne, C.R. Quantitative Analysis of Land Surface Topography. Process. Landf. 1987, 12, 47–56. [Google Scholar] [CrossRef]
- Desmet, P.J.J.; Govers, G. A GIS Procedure for Automatically Calculating the USLE LS Factor on Topographical;Ly Complex Landscape Units. J. Soil Water Conserv. 1996, 51, 427–433. [Google Scholar]
- Gallant, J.C.; Dowling, T.I. A Multiresolution Index of Valley Bottom Flatness for Mapping Depressional Areas. Water Resour. Res. 2003, 39, 1347–1359. [Google Scholar] [CrossRef]
- Böhner, J.; Selige, T. Spatial Prediction of Soil Attributes Using Terrain Analysis and Climate Regionalisation. In SAGA—Analysis and Modelling Aplications; Boehner, J., McCloy, K.R., Strobl, J., Eds.; Goettinger Geographische Abhandlungen: Göttingen, Germany, 2006; Volume 115, pp. 13–28. [Google Scholar]
- Weiss, A. Topographic Position and Landforms Analysis. In Proceedings of the ESRI User Conference, San Diego, CA, USA, 9–13 July 2001. [Google Scholar]
- McKenzie, N.; Gessler, P.; Ryan, P.; O”Connell, D. The Role of Terrain Analysis in Soil Mapping. In Terrain Analysis: Principals and Applications; Wilson, J.P., Gallant, J.C., Eds.; John Wiley and Sons Inc.: Hoboken, NJ, USA, 2000. [Google Scholar]
- Moore, I.D.; Grayson, R.B.; Lasdon, A.R. Digital Terrain Modelling: A Review of Hydrological, Geomorphological, and Biological Applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Böhner, J.; Antonic, O. Land-Surface Parameters Specific to Topo-Climatology. In Geomorphometry—Concepts, Software, Aplications. Developments in Soil Science.; Hengl, T., Reuter, H., Eds.; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 195–226. [Google Scholar]
- Böhner, J.; Koethe, R.; Conrad, O.; Gross, J.; Ringeler, A.; Selige, T. Soil Regionalisation by Means of Terrain Analysis and Process Parameterisation. In Soil Classification 2001; European Soil Bureau: Luxembourg, 2002; pp. 213–222. [Google Scholar]
- Guisan, A.; Weiss, S.B.; Weiss, A.D. GLM versus CCA Spatial Modeling of Plant Species Distribution. Plant Ecol. 1999, 143, 107–122. [Google Scholar] [CrossRef]
- Riley, S.J.; De Gloria, S.D.; Elliot, R. A Terrain Ruggedness That Quantifies Topographic Heterogeneity. Intermt. J. Sci. 1999, 5, 23–27. [Google Scholar]
- Beven, K.J.; Kirkby, M.J. A Physically-Based Variable Contributing Area Model of Basin Hydrology. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef]
- Rodriguez, F.; Maire, E.; Courjault-Rad’e, P.; Darrozes, J. The Black Top Hat Function to a DEM: A Tool to Estimate Recent Incision in a Mountainous Watershed. Geophys. Res. Lett. 2002, 29, 9-1–9-4. [Google Scholar] [CrossRef]
- Ferhatoglu, C.; Miller, B.A. Choosing Feature Selection Methods for Spatial Modeling of Soil Fertility Properties at the Field Scale. In Proceedings of the 30th International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 1–4 November 2022; Association for Computing Machinery: New York, NY, USA, 2022. [Google Scholar]
- Neter, J.; Wasserman, W.; Kutner, M.H. Applied Linear Regresion Models; Richard D Irwin, Inc.: Honeywood, IL, USA, 1983; ISBN 0-256-02547-9. [Google Scholar]
- Craney, T.A.; Surles, J.G. Model-Dependent Variance Inflation Factor Cutoff Values. Qual. Eng. 2002, 14, 391–403. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Yousefi, S.; Kornejady, A.; Cerdà, A. Performance Assessment of Individual and Ensemble Data-Mining Techniques for Gully Erosion Modeling. Sci. Total Environ. 2017, 609, 764–775. [Google Scholar] [CrossRef] [PubMed]
- O’brien, R.M. A Caution Regarding Rules of Thumb for Variance Inflation Factors. Qual. Quant. 2007, 41, 673–690. [Google Scholar] [CrossRef]
- Pebesma, E.J. Multivariable Geostatistics in S: The Gstat Package. Comput. Geosci. 2004, 30, 683–691. [Google Scholar] [CrossRef]
- Mangiafico, S.S. Rcompanion: Functions to Support Extension Education Program Evaluation. Version 2.4.35. Rutgers Cooperative Extension. New Brunswick, New Jersey. 2023. Available online: https://CRAN.R-project.org/package=rcompanion (accessed on 15 February 2024).
- Roudier, P. Clhs: A R Package for Conditioned Latin Hypercube Sampling. 2011. Available online: https://cran.r-project.org/web/packages/clhs/index.html (accessed on 15 February 2024).
- Lin, J. Divergence Measures Based on the Shannon Entropy. IEEE Trans. Inf. Theory 1991, 37, 145–151. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Kuhn, M. Caret: Classification and Regression Training. R Package Version 6.0-92. 2022. Available online: https://cran.r-project.org/web/packages/caret/index.html (accessed on 15 February 2024).
- Lin, L.I.-K. A Concordance Correlation Coefficient to Evaluate Reproducibility. Biometrics 1989, 45, 255. [Google Scholar] [CrossRef]
- Christopoulos, D.T. Introducing Unit Invariant Knee (UIK) As an Objective Choice for Elbow Point in Multivariate Data Analysis Techniques. SSRN Electron. J. 2016, 1, 7. [Google Scholar] [CrossRef]
- Meinhausen, N. Quantile Regression Forests. J. Mach. Learn. Res. 2006, 7, 983–999. [Google Scholar]
- Meinhausen, N. quantregForest: Quantile Regression Forests. Version 1.3-7. 2017. Available online: https://cran.r-project.org/web/packages/quantregForest/quantregForest.pdf (accessed on 15 February 2024).
- Kasraei, B.; Heung, B.; Saurette, D.D.; Schmidt, M.G.; Bulmer, C.E.; Bethel, W. Quantile Regression as a Generic Approach for Estimating Uncertainty of Digital Soil Maps Produced from Machine-Learning. Environ. Model. Softw. 2021, 144, 105139. [Google Scholar] [CrossRef]
- Ma, T.; Brus, D.J.; Zhu, A.-X.; Zhang, L.; Scholten, T. Comparison of Conditioned Latin Hypercube and Feature Space Coverage Sampling for Predicting Soil Classes Using Simulation from Soil Maps. Geoderma 2020, 370, 114366. [Google Scholar] [CrossRef]
- Wadoux, A.M.J.-C.; Brus, D.J.; Heuvelink, G.B.M. Sampling Design Optimization for Soil Mapping with Random Forest. Geoderma 2019, 355, 113913. [Google Scholar] [CrossRef]
- Wadoux, A.M.J.-C.; Brus, D.J. How to Compare Sampling Designs for Mapping? Eur. J. Soil Sci. 2021, 72, 35–46. [Google Scholar] [CrossRef]
- Ramezan, C.A.; Warner, T.A.; Maxwell, A.E.; Price, B.S. Effects of Training Set Size on Supervised Machine-Learning Land-Cover Classification of Large-Area High-Resolution Remotely Sensed Data. Remote Sens. 2021, 13, 368. [Google Scholar] [CrossRef]
- Shao, S.; Su, B.; Zhang, Y.; Gao, C.; Zhang, M.; Zhang, H.; Yang, L. Sample Design Optimization for Soil Mapping Using Improved Artificial Neural Networks and Simulated Annealing. Geoderma 2022, 413, 115749. [Google Scholar] [CrossRef]
- Safaee, S.; Libohova, Z.; Kladivko, E.J.; Brown, A.; Winzeler, E.; Read, Q.; Rahmani, S.; Adhikari, K. Influence of Sample Size, Model Selection, and Land Use on Prediction Accuracy of Soil Properties. Geoderma Reg. 2024, 36, e00766. [Google Scholar] [CrossRef]
- Loiseau, T.; Arrouays, D.; Richer-de-Forges, A.C.; Lagacherie, P.; Ducommun, C.; Minasny, B. Density of Soil Observations in Digital Soil Mapping: A Study in the Mayenne Region, France. Geoderma Reg. 2021, 24, e00358. [Google Scholar] [CrossRef]
- Taghizadeh-Mehrjardi, R.; Hamzehpour, N.; Hassanzadeh, M.; Heung, B.; Ghebleh Goydaragh, M.; Schmidt, K.; Scholten, T. Enhancing the Accuracy of Machine Learning Models Using the Super Learner Technique in Digital Soil Mapping. Geoderma 2021, 399, 115108. [Google Scholar] [CrossRef]
- Chen, S.; Mulder, V.L.; Heuvelink, G.B.M.; Poggio, L.; Caubet, M.; Román Dobarco, M.; Walter, C.; Arrouays, D. Model Averaging for Mapping Topsoil Organic Carbon in France. Geoderma 2020, 366, 114237. [Google Scholar] [CrossRef]
- Sylvain, J.-D.; Anctil, F.; Thiffault, É. Using Bias Correction and Ensemble Modelling for Predictive Mapping and Related Uncertainty: A Case Study in Digital Soil Mapping. Geoderma 2021, 403, 115153. [Google Scholar] [CrossRef]
- Arrouays, D.; Grundy, M.G.; Hartemink, A.E.; Hempel, J.W.; Heuvelink, G.B.M.; Hong, S.Y.; Lagacherie, P.; Lelyk, G.; McBratney, A.B.; McKenzie, N.J.; et al. Chapter Three—GlobalSoilMap: Toward a Fine-Resolution Global Grid of Soil Properties. In Advances in Agronomy; Sparks, D.L., Ed.; Academic Press: Cambridge, MA, USA, 2014; Volume 125, pp. 93–134. ISBN 0065-2113. [Google Scholar]
- Hengl, T.; Mendes de Jesus, J.; Heuvelink, G.B.M.; Ruiperez Gonzalez, M.; Kilibarda, M.; Blagotić, A.; Shangguan, W.; Wright, M.N.; Geng, X.; Bauer-Marschallinger, B.; et al. SoilGrids250m: Global Gridded Soil Information Based on Machine Learning. PLoS ONE 2017, 12, e0169748. [Google Scholar] [CrossRef] [PubMed]
- Poggio, L.; de Sousa, L.M.; Batjes, N.H.; Heuvelink, G.B.M.; Kempen, B.; Ribeiro, E.; Rossiter, D. SoilGrids 2.0: Producing Soil Information for the Globe with Quantified Spatial Uncertainty. SOIL 2021, 7, 217–240. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Covariate Type | Covariate Name | Abbreviation | Reference |
|---|---|---|---|
| Topography | Elevation | dem | n/a |
| Catchment area 1 | catch | Freeman [46] | |
| Convergence Index | conv | Koethe and Lehmeier [47] | |
| Deviation from Mean Elevation (4 neighborhood sizes: 3, 150, 2000 and 6000) | deme3 | Lindsay [34] | |
| deme150 | |||
| deme2000 | |||
| deme6000 | |||
| Difference from Mean Elevation (4 neighborhood sizes: 3, 150, 2000 and 6000) | dime3 | Lindsay [34] | |
| dime150 | |||
| dime2000 | |||
| dime6000 | |||
| Eastness (sin[aspect]) | eastness | n/a | |
| Elevation Percentile (4 neighborhood sizes: 3, 150, 2000 and 6000) | ep3 | Lindsay [34] | |
| ep150 | |||
| ep2000 | |||
| ep6000 | |||
| General Curvature | gcurv | Zevenbergen and Thorne [48] | |
| Analytical Hillshading | hill | Zevenbergen and Thorne [48] | |
| Impoundment Size Index | isi | Lindsay [34] | |
| ISI Dam Height | isi_dam_height | Lindsay [34] | |
| Topographic (LS) Factor | ls | Desmet and Govers [49] | |
| Max Difference from Mean Elevation (3 ranges for search neighborhoods: 3–150, 150–2000, 2000–6000) | mdm150 | Lindsay [34] | |
| mdm2000 | |||
| mdm6000 | |||
| Max Difference from Mean Elevation (3 ranges for search neighborhoods: 3–150, 150–2000, 2000–6000) | mdms150 | Lindsay [34] | |
| mdms2000 | |||
| mdms6000 | |||
| Max Elevation Deviation (3 ranges for search neighborhoods: 3–150, 150–2000, 2000–6000) | med150 | Lindsay [34] | |
| med2000 | |||
| med6000 | |||
| Max Elevation Deviation Scale (3 ranges for search neighborhoods: 3–150, 150–2000, 2000–6000) | meds150 | Lindsay [34] | |
| meds2000 | |||
| meds6000 | |||
| Multi Resolution Ridge Top Flatness | mrrtf | Gallant and Dowling [50] | |
| Multi Resolution Valley Bottom Flatness | mrvbf | Gallant and Dowling [50] | |
| Mid Slope Position | msp | Böhner and Selige [51] | |
| Multiscale Topographic Position Index | mstpi | Weiss [52] | |
| Normalized Height | normh | Böhner and Selige [51] | |
| Northness (cos[aspect]) | northness | n/a | |
| Plan Curvature | plan | Zevenbergen and Thorne [48] | |
| Profile Curvature | pro | Zevenbergen and Thorne [48] | |
| Relative Slope Position | rsp | Weiss [52] | |
| Slope Length | slen | McKenzie et al. [53] | |
| Slope Height | slopeh | Böhner and Selige [51] | |
| Slope Gradient | sloper | Zevenbergen and Thorne [48] | |
| Stream Power Index | spi | Moore et al. [54] | |
| Standardized Height | stanh | Böhner and Selige [51] | |
| Skyview Factor | svf | Böhner and Antonic [55] | |
| SAGA Wetness Index | swi | Böhner et al. [56] | |
| Total Curvature | tcurv | Zevenbergen and Thorne [48] | |
| Topographic Position Index | tpi | Guisan et al. [57] | |
| Terrain Ruggedness Index | tri | Riley et al. [58] | |
| Topographic Wetness Index | twi | Beven and Kirby [59]; Moore et al. [54] | |
| Valley Depth | vdepth | Rodriguez et al. [60] | |
| Visible Sky | vis | Böhner and Antonic [55] | |
| Geology | Radiometric thorium | radTh | Natural Resources Canada [38] |
| Radiometric uranium:potassium | radUK | ||
| Radiometric uranium | radU | ||
| Radiometric potassium | radK | ||
| Radiometric thorium:potassium | radThK | ||
| Radiometric uranium:thorium | radUTh | ||
| Quaternary Geology | Surficial_geo (6) | Ontario Geological Survey [41] | |
| Bedrock Geology | Bedrock_geo (4) | Ontario Geological Survey [42] | |
| Vegetation | Maximum of Normalized Difference Vegetation Index | ott_NDVI_max | Sentinel 2 Multi Spectral Instrument, Level-2A, via Google Earth Engine |
| Median of Normalized Difference Vegetation Index | ott_NDVI_median | ||
| Standard Deviation of Normalized Difference Vegetation Index | ott_NDVI_sd | ||
| Soil | Soil Order | Soil Order (5) | Ontario Ministry of Agriculture, Food and Rural Affairs [43] |
| Distance Metrics | Euclidean Distance Fields (distance to middle, NE, SE, SW, NW, max X, max Y) | distmid | Behrens et al. [40] |
| distne | |||
| distse | |||
| distsw | |||
| distnw | |||
| distx | |||
| disty |
| Property | Min | Mean | Median | Max | SD | Skew | Kurtosis |
|---|---|---|---|---|---|---|---|
| Cation exchange capacity (cmol+/kg) | 0.25 | 20.43 | 19.17 | 103.70 | 12.38 | 1.29 | 3.64 |
| Clay content (%) | 0.00 | 26.14 | 22.77 | 83.10 | 16.18 | 0.73 | −0.15 |
| pH | 3.33 | 5.81 | 5.79 | 7.60 | 0.87 | −0.06 | −0.72 |
| Soil organic carbon (%) | 0.02 | 3.23 | 2.56 | 23.10 | 2.44 | 3.13 | 13.66 |
| Property | Model Type | Nugget | Partial Sill | Range (m) |
|---|---|---|---|---|
| Cation exchange capacity | Exponential | 0.22 | 0.20 | 5553 |
| Clay content | Exponential | 0.13 | 0.32 | 1706 |
| pH | Exponential | 0.41 | 0.44 | 11,331 |
| Soil organic carbon | Exponential | 0.013 | 0.004 | 5215 |
| Soil Property | Sampling Algorithm | Optimal Sample Size and Corresponding Performance Metric | |||
|---|---|---|---|---|---|
| Sample Size | Concordance | Sample Size | Root Mean Square Error | ||
| CEC | cLHS | 900 | 0.76 | 900 | 2.93 |
| FSCS | 800 | 0.74 | 800 | 3.03 | |
| SRS | 1000 | 0.76 | 1000 | 2.95 | |
| Clay | cLHS | 700 | 0.65 | 700 | 4.76 |
| FSCS | 900 | 0.66 | 1400 | 4.37 | |
| SRS | 600 | 0.62 | 700 | 4.89 | |
| pH | cLHS | 500 | 0.89 | 900 | 0.18 |
| FSCS | 700 | 0.90 | 700 | 0.20 | |
| SRS | 500 | 0.88 | 800 | 0.19 | |
| SOC | cLHS | 1000 | 0.66 | 1000 | 0.32 |
| FSCS | 1400 | 0.71 | 1400 | 0.30 | |
| SRS | 1200 | 0.68 | 1600 | 0.28 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saurette, D.D.; Heck, R.J.; Gillespie, A.W.; Berg, A.A.; Biswas, A. Sample Size Optimization for Digital Soil Mapping: An Empirical Example. Land 2024, 13, 365. https://doi.org/10.3390/land13030365
Saurette DD, Heck RJ, Gillespie AW, Berg AA, Biswas A. Sample Size Optimization for Digital Soil Mapping: An Empirical Example. Land. 2024; 13(3):365. https://doi.org/10.3390/land13030365
Chicago/Turabian StyleSaurette, Daniel D., Richard J. Heck, Adam W. Gillespie, Aaron A. Berg, and Asim Biswas. 2024. "Sample Size Optimization for Digital Soil Mapping: An Empirical Example" Land 13, no. 3: 365. https://doi.org/10.3390/land13030365
APA StyleSaurette, D. D., Heck, R. J., Gillespie, A. W., Berg, A. A., & Biswas, A. (2024). Sample Size Optimization for Digital Soil Mapping: An Empirical Example. Land, 13(3), 365. https://doi.org/10.3390/land13030365