1. Introduction
Land change models are developed both as a means of understanding the drivers of land cover change, and as a means of predicting potential future scenarios of land cover [
1]. Projecting where land cover will change may be modeled either empirically or theoretically. However, a key component of a land change model is the ability to estimate the amount of expected change over a specified time interval for every land transition of interest. A common approach is Markov chain analysis [
1,
2] where historical land cover change is used to develop a transition probability matrix that expresses the relative frequency of transitions between land cover categories over time. When the future projection is an integer multiple of the historical time frame examined, the mathematical development of the transition probability matrix is straightforward. However, there are times when the future projection needs to be for a time that does not coincide with an integer multiple of the historical time frame. For example, a specific future scenario might be of interest, such as 2050, that does not coincide with an integer multiple. Similarly, if a regional projection is being developed based on a set of subregions where the historical data are from differing periods, the projection forward to a common future scenario may involve non-integer time periods. Unfortunately, when the future time period of interest is not an integer multiple of the historical time frame, the process is much more difficult.
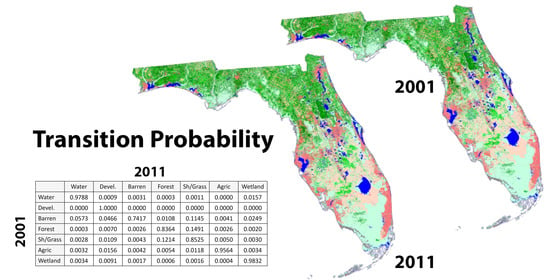
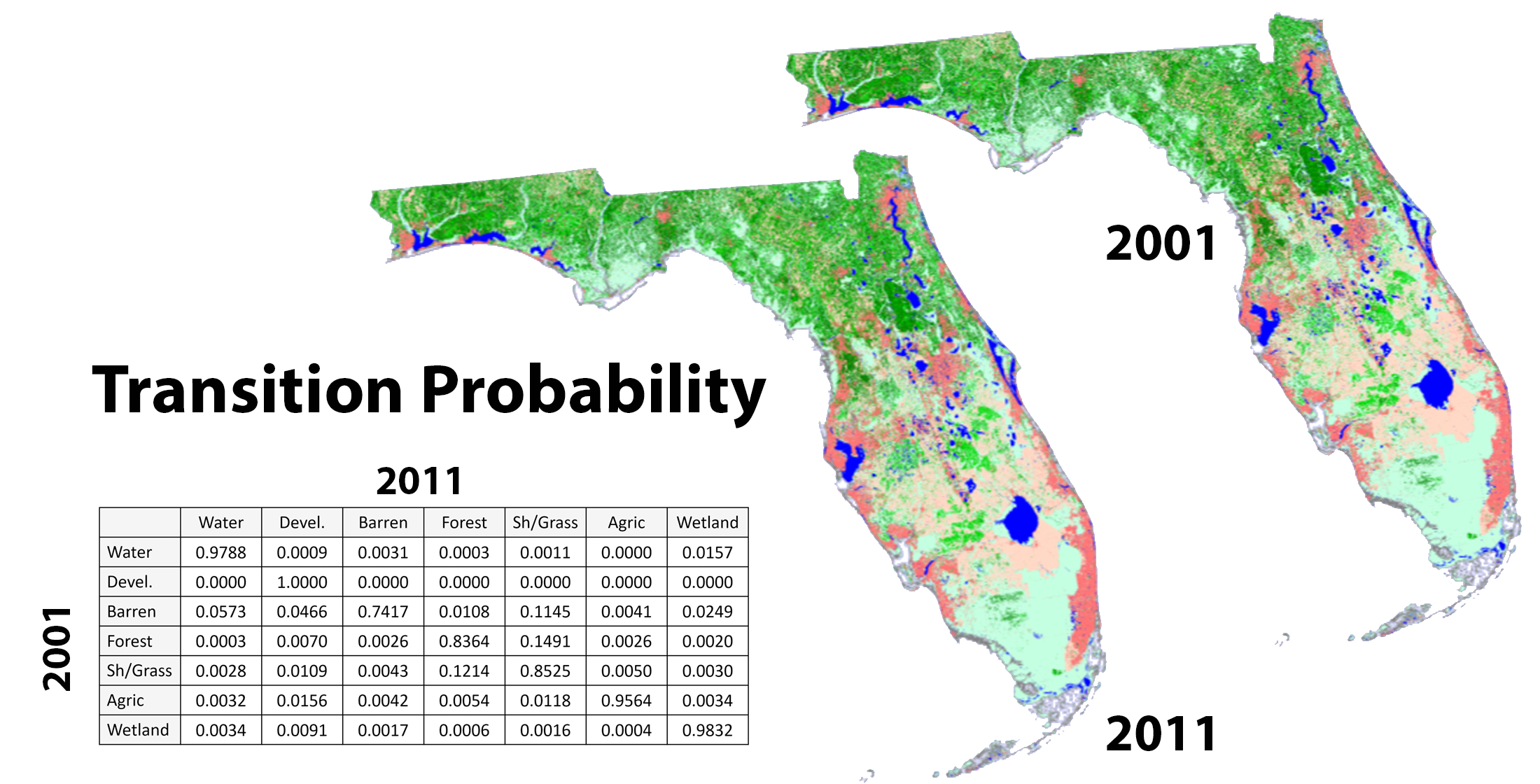
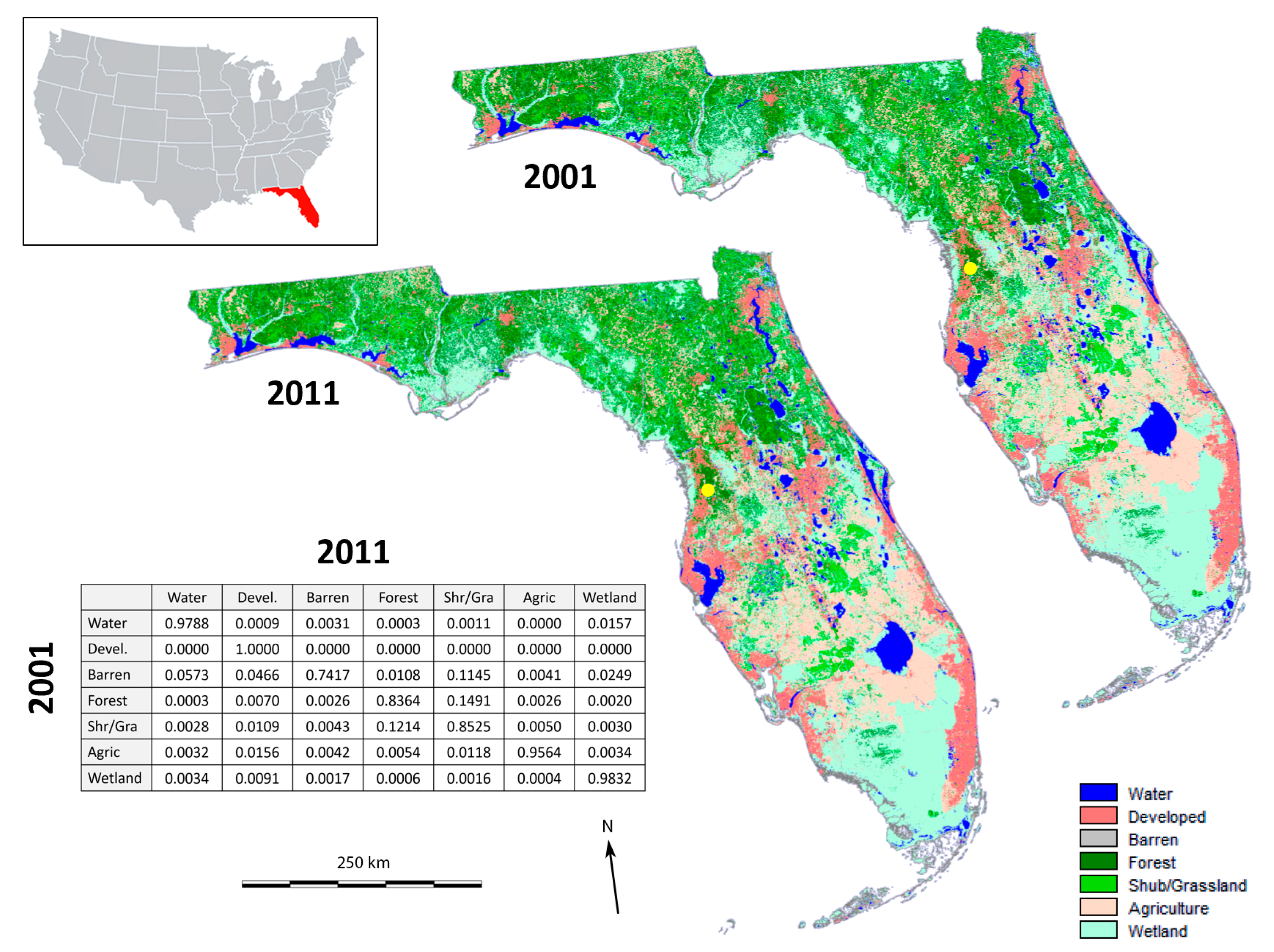
Figure 1 illustrates the basic requirements for a Markov chain analysis. Given two land cover maps (for 2001 and 2011 for the state of Florida in the United States in this example), a crosstabulation of the
k land covers at pixels in 2001 and their corresponding land covers in 2011 allows the construction of a
k ×
k matrix of relative frequencies of transitions between the two dates. Thus, for example, 14.91% of forest in 2001 transitioned to shrub/grass in 2011. If the projection forward in time were 10 years, to 2021, then this table could be used as the transition probability matrix. Thus, it would be expected that an additional 14.91% of remaining forest would transition to shrub/grass. However, if the projection forward were to 2031 (20 years), the expected transition probability matrix would be the square of the base matrix. In this case, 25.21% of forest in 2011 would be expected to transition to shrub/grass by 2031. In general, if
P is the base transition probability matrix, then:
is the expected transition probability matrix (
P′) for
n steps beyond the historical period [
3].
When the projection forward is not an integer multiple of the base time frame, a potential solution is to estimate the annual rate of change and then to use the power rule to project forwards for the correct number of years [
4,
5]. Based on the relationship expressed in Equation (1), given a base transition matrix over
t years,
Pt, the annual transition matrix
P1 can be determined as:
The difficult part of this relationship is the need to take a
tth root of the base matrix. Currently, there are two mathematical approaches to solve this problem [
6]. One is to use matrix logarithms and exponentials:
where
logm is the matrix logarithm and
expm is the matrix exponential. The other is to use eigendecomposition [
5,
6]:
where
λi is the
ith eigenvalue of matrix
Pt (the base matrix for
t years) and
U is a
k ×
k eigenmatrix, given
k land cover classes. However, as discussed by Takada et al. [
6], these two comparable approaches can present problems. Using eigendecomposition, encoded into a computer program called TAM, they showed that mathematically there are multiple solutions for estimation of the annual rate of change on the order of
tk, where
t is the number of years between the two historical land covers examined (10 years in the above example), and
k is the number of land cover classes (7 in this example). Thus, for the example with Florida, there are ten million (10
7) annual solutions, all of which obey the power rule to yield the base matrix. Many of these are complex number solutions and of those that are real, some involve negative transition probabilities. This is not reasonable since Markov transition probability matrices are stochastic matrices, which are defined by being composed entirely of non-negative real numbers that sum to 1 across each row [
7]. Takada et al. [
6] also indicate that it is possible that more than one stochastic annual transition matrix may be found, or indeed that none will be found. In a follow-up study, Hasegawa et al. [
8] found that only 11% of 62 cases examined produced stochastic matrices. However, they showed that by forcing small negative transitions to be 0, it was possible to increase this number to 87%. That said, the biggest issue is the computational burden of the procedure used. Hasegawa et al. [
8] cite an example of solving a case with 10 classes over 24 years requiring over 1000 days for computation.
To summarize, the standard approach to producing a projected Markov transition probability matrix for any arbitrary date into the future is through mathematical determination of the annualized rate (such as through eigendecomposition), and then to power the matrix to the desired date using Equation (1). However, there are several problems with the approach:
Mathematical solution yields multiple results, many of which involve complex numbers and negative transition probabilities. Such matrices are unusable for land cover modeling of future transitions.
It is possible that no non-negative real stochastic solution can be achieved. In these cases, an approximation can sometimes be achieved by forcing small negative transition probabilities to 0.
Most importantly, for computational reasons, solutions are only feasible when either or both the historical time period and the number of land cover classes are very small.
This paper describes an alternative Regression-Based Markov (RBM) approximate solution that was developed as part of the IDRISI (MARKOV module) and Land Change Modeler applications inside the TerrSet software suite [
9]. The procedure has none of these limitations. It is quick and always produces a stochastic matrix, based on polynomial regression. It can also solve any size problem, which is a severe limitation for mathematical solutions. However, it is an approximation, and while the general logic of the system has been very briefly discussed in the TerrSet help system [
9] and elsewhere [
10,
11,
12,
13], it has never been fully described and has never been formally evaluated. This paper seeks to address this gap with a description and evaluation of the procedure in TerrSet version 19.0.2. To our knowledge, the approach is unique and with this analysis we seek to establish how closely the result approaches the correct solution when a mathematical solution is possible. As of the time of this writing, over 1600 articles are listed in Google Scholar that reference the Land Change Modeler (such as [
14,
15,
16,
17,
18]), for which the RBM algorithm is a critical component. Thus, it is very important to establish its limitations. As we will show, the approach provides a high-quality approximation that always provides a solution, and which overcomes the prohibitive computational hurdle faced by mathematical approaches.
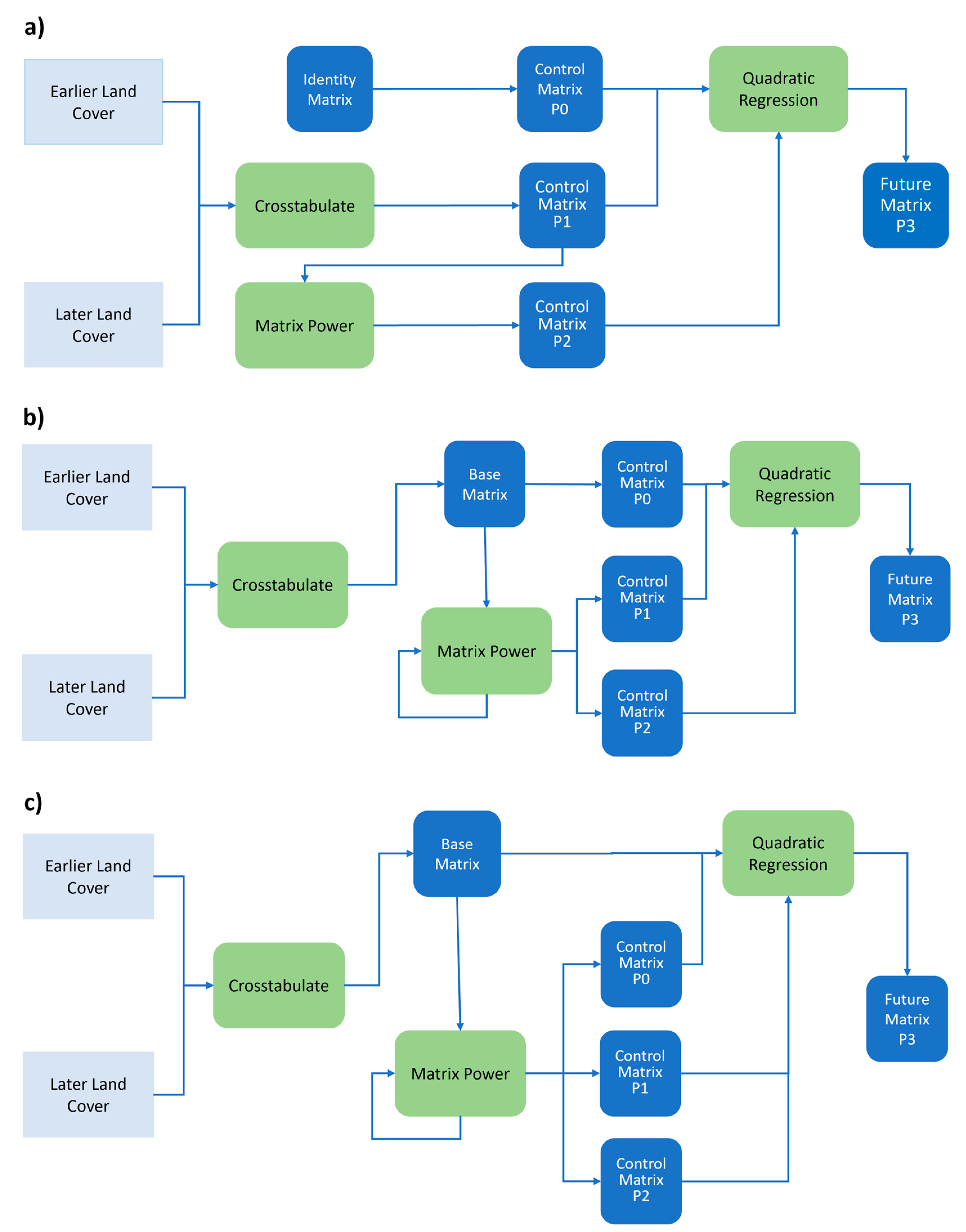
2. Regression-Based Markov
The Regression-Based Markov (RBM) approach substitutes statistical characterization and prediction for a mathematical solution for transition probability estimation. The basic logic of the algorithm is to use the power rule (Equation (1)) to generate three exact transition matrices that surround the future time period of interest. These are referred to as the control matrices. A series of quadratic regressions [
19] (second-order polynomial) is then fit to the three values over time at each cell in the matrices as follows:
where
pijt represents the transition probability for land cover
i transitioning to land cover
j at time step
t, where t assumes values of 0, 1 and 2 for the three matrices generated. Since there are three data points for each transition, the regression will yield a perfect fit. The fitted equation is then used to estimate the transition probability for any period of time between these control matrices. Since the transition has
k ×
k entries, a total of
k2 regressions are computed.
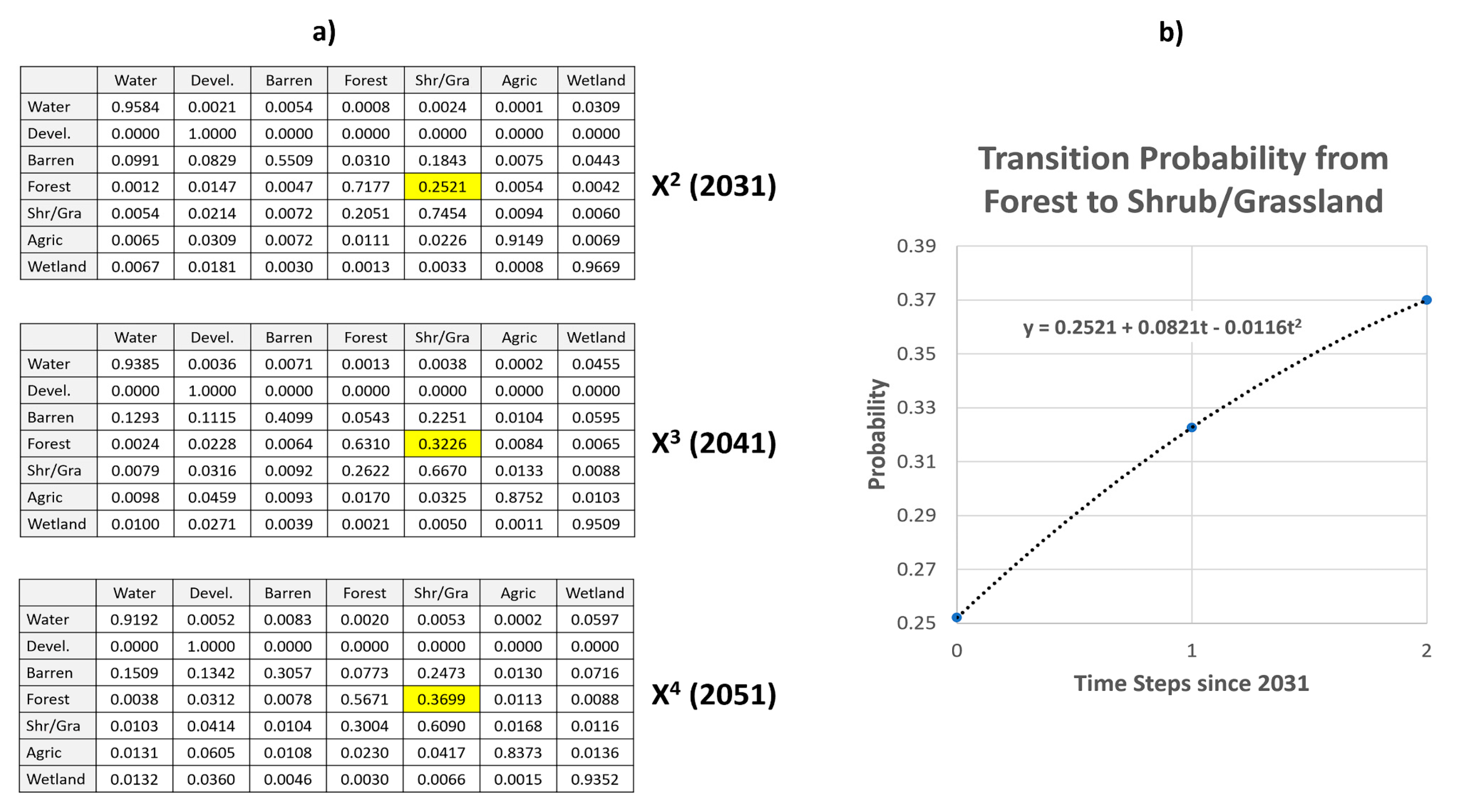
Figure 2 illustrates this concept.
As an example, consider the case of trying to generate a transition probability matrix for the year 2035 for the example with Florida (
Figure 2). The year 2035 is 24 years beyond the end of the historical period, 2011. The base probability matrix in
Figure 1 would be raised to the 2nd, 3rd and 4th powers to get the proper control matrices for 2031, 2041 and 2051. Predicted transition potentials would then be generated for the 49 transitions associated with this 7 × 7 table using a value of 0.4 as the value for
t in Equation (2) since 2035 is 4/10 of the way between 2031 and 2041.
In a case where the target projection is less than one complete time step (10 years in the Florida case), an identity matrix is used for the first matrix, while the base matrix would be used for the second matrix and the base matrix squared would be used for the third. With this logic, the regression is only ever used for interpolation, and never extrapolation. The identity matrix has values of one along the diagonal and zero elsewhere. The rational for using the identity matrix is that if the passage of time is 0, the probability of each land cover remaining the same is 1.0 and the probability of transitioning to another category is 0.0. It is also known that any square matrix to the power of 0 is an identity matrix [
20].
Figure 3 provides a schematic to illustrate the algorithm for all three variants based on the relationship between the projection date and the historical time frame.
5. Discussion
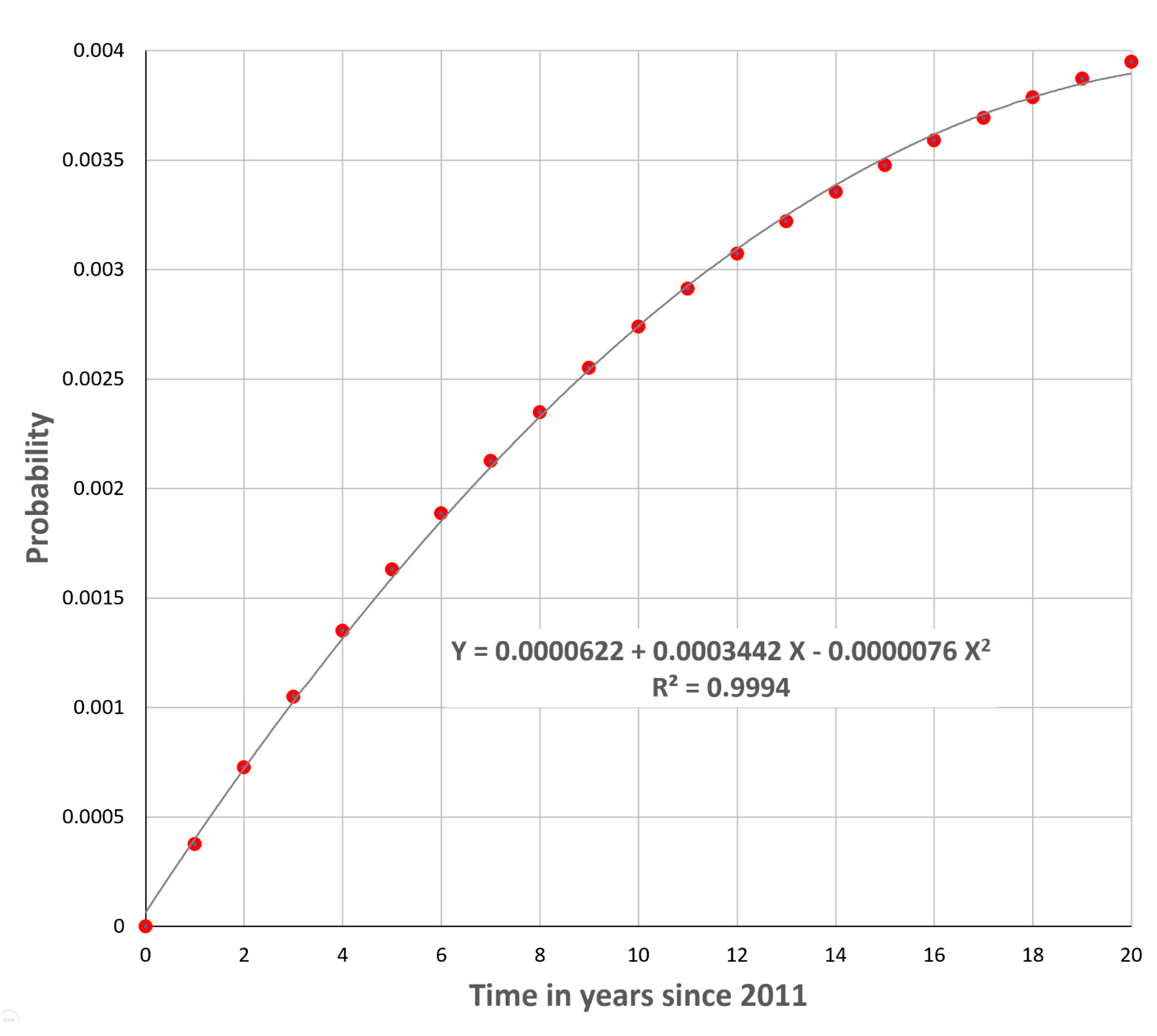
It is clear from the results that a quadratic regression fits the evolution of transition probabilities over differing durations of time very well. The worst model fit had an Adjusted R
2 of 99.94%. Comparing the fitted transition probabilities to the correct values as computed by TAM (
Table 1), half the errors in each of the five focus states (as measured by the median) were less than 0.00001 and no errors were as high as one percent (the maximum was 0.006).
This raises the question of what constitutes an acceptable error. The authors in [
7] describe an approximation commonly used in the medical field in which the individual probabilities
p in the base matrix
P are used to estimate their annual equivalent probabilities
p1 using the following formula:
where t is the number of years between the historical periods used to compute the base transition matrix. Using this procedure for the transition with the maximum RBM error encountered in Georgia, the error resulting from Equation (6) was 0.028—well above 1% and almost five times higher than that encountered using RBM.
The TAM procedure [
6] is also an approximation whenever small negative transition probabilities are found. Negative values between -0.1 and 0 are forced to 0 and then the affected row category is renormalized so that the row probabilities sum to 1. In theory, an adjustment to a transition probability in the TAM procedure could be as high as 0.1. However, their illustration [
6] for the Abukuma Mountain region suggests the adjustment is typically much smaller, showing a median adjustment of 0.0001 for classes with small negative transition probabilities and a maximum adjustment of 0.001. Similarly, their analysis of the transition matrices from [
5] showed a maximum adjustment of 0.003. Given this, the median error encountered with the RBM procedure of less than 0.00001 seems very small and the maximum error of 0.006 is of the same order of magnitude as the possible error resulting from the TAM procedure when small negative transition probabilities are found.
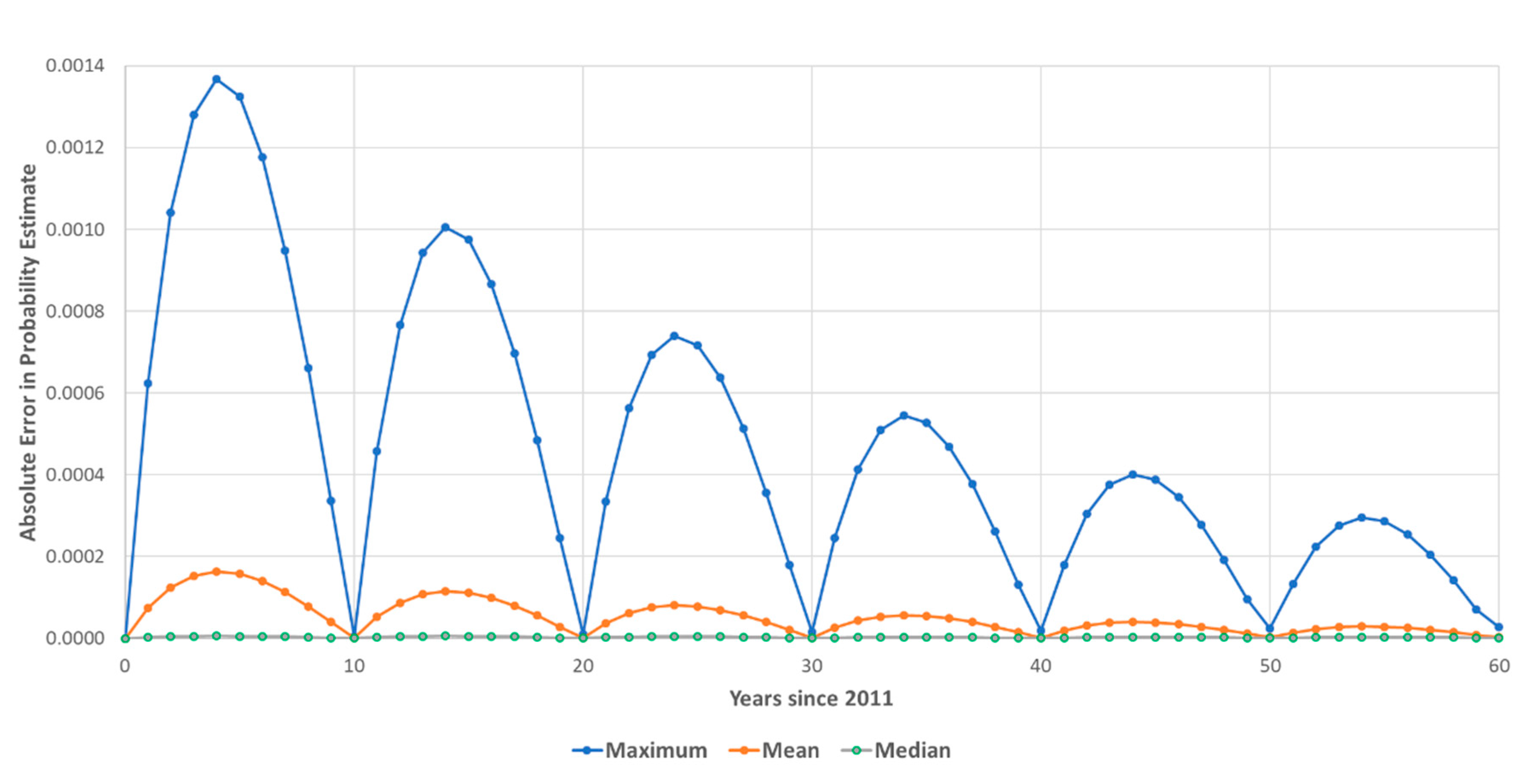
Another interesting feature of the error distribution is that for all five states assessed, the error distribution showed a distinctive pattern. Errors approached 0 as the duration of time assessed approached an integer interval of the base time period (i.e., one of the control matrices). In this study, these occurred at multiples of 10 years. The worst errors then occurred about 40% of the way between control points because of the parabolic shape of the regression. Note that the error for a duration of 0 was assumed to be zero on the basis that the transition matrix for a duration of 0 in time would be the identity matrix.
Another noticeable feature of the distribution of errors is that the errors from 10 to 20 years are less than for 0–10 years (
Figure 5). This was the case for all five focus states examined (see also
Figures S1–S4). We reasoned that this was probably because most regular Markov transition probability matrices evolve to an equilibrium state as the time duration increases [
3]. To gain further insight into this, we extended the error analysis for Florida to 60 years.
Figure 6 shows the result.
From
Figure 6, it is clear that the error declines dramatically as the duration of the time interval increases. Over 60 years, the maximum error dropped from a little over a tenth of a percent at 4 years to less than 3/100 of a percent at 54 years in the last regression sequence. This is logical. While the mathematical proof is beyond the scope of this communication, it can be shown [
3,
22] that Markov transition matrices contain states that can be characterized as absorbing, transient and recurrent. Absorbing states are those from which it is impossible to escape. In the Florida example, development is an absorbing state. Once a land cover transitions to development, it never transitions to any other class. The transition probabilities for absorbing states remain fixed over time, and thus can be modeled perfectly by the quadratic regression. Transient states are those which transition to either an absorbing state or a recurrent state. Recurrent states are those where a land cover can transition out of a particular class and then return at a later date. A special property of most recurrent states is that they evolve to an equilibrium distribution, with transition probabilities that remain constant over time. As such, they can be modeled perfectly once the equilibrium state is reached. The exception is periodic recurrent states, but these are very unlikely to occur with land cover. Periodic recurrent states require that their persistence transition along the diagonal (such as Forest remaining Forest) has a value of 0 [
22]. This is very unlikely, if ever, to occur with land cover, and did not occur in the transition matrices for any of the 48 US states observed. Thus, it is fair to state that land change transition matrices effectively always transition to a limiting stationary matrix where the error associated with the quadratic model of the RBM procedure approaches zero. This then accounts for the progressive reduction in error as the time interval increases.
Another feature that is evident in
Figure 6 is that the error at multiples of the base interval (10 years in this illustration), which one would expect to be 0, progressively increases. In the figure, this is only visually noticeable for the maximum error. We believe this is attributable to precision issues as the powering of matrices increases. Both the RBM and TAM procedures are susceptible to this, but it is worse for TAM. For example, to yield the estimate for an interval of 60 years, the RBM procedure only needs to take the base matrix to the power of 6, whereas the TAM procedure needs to take the annualized matrix to the power of 60. Thus, the difference between the two procedures for this component is mostly attributable to TAM. Regardless, the problem is very small (less than 3/1000 of a percent at 60 years).
Finally, it should be emphasized that perhaps the most important feature of the RBM procedure is its simplicity and speed. As noted by [
8], the TAM procedure is not feasible for problems with a large number of years and/or land cover classes. For example, our original intent was to use the NLCD data with 15 classes over 10 years. Using the timing information provided by [
8], it would take over 43 years to compute each of the annualized transition matrices. For the RBM procedure, it takes less than a second.
6. Conclusions
This study provided a description and evaluation of a Regression-Based Markov (RBM) transition probability matrix estimation procedure for land change modeling and prediction. The problem is to estimate the transition probability matrix necessary to determine the amount of land cover change for any arbitrary time into the future. Unlike a mathematical solution based on eigendecomposition or matrix logarithms/exponentials, which is prone to multiple solutions, frequently involving complex numbers and negative transition probabilities, and even the possibility of no solution, the RBM procedure uses a transition-specific modeling approach that always produces a single non-negative real stochastic matrix.
RBM, however, is an approximation. Comparison with results using eigendecomposition with single stochastic matrices for 42 US states from 2001 to 2011 (which are definitively the correct results), it was determined that the error was typically extremely small (median probability error of 0.00001) and had a maximum error (0.006) similar to that expected from eigendecomposition when a small negative solution is forced to 0 (a common approximation when a single stochastic matrix cannot be achieved). Similarly, comparison with a leading approximation technique in the medical field showed that the RBM algorithm is substantially more accurate, having an error almost five times lower in the worst case encountered.
Error analysis using RBM also showed that errors were at a maximum about 40% of the way between integer multiples of the historical time frame, and decreased to 0 approaching any integer multiple. In addition, as the length of the future projection increased, estimation error of transition probabilies progressively decreased. It was determined that this results from the basic property of Markov transition matrices to evolve to a stable state.
Most importantly, the RBM procedure is capable of finding solutions for large problems with extreme rapidity. A mathematical solution (such as with eigendecomposition) is computationally explosive and effectively infeasible when the number of land cover classes reaches double digits. In contrast, the RBM procedure does not have this limitation and can typically solve in fractions of a second. It thus presents a broadly-applicable approximation with very low error characteristics.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}